Модуль преобразования энергии ветра - RU2665847C1
Код документа: RU2665847C1
Чертежи

Описание
Изобретение относится к области энергетики, а более конкретно касается ветровых энергетических установок, производящих электрическую энергию за счет использования силы потока воздуха.
Уровень техники
Из уровня техники известен модуль преобразования энергии ветра для направляющего полотна, представляющий собой каретку, выполненную с возможностью перемещения по пути, выполненному из каркаса в виде фермы, содержит крыловые профили, установленные на каретке, причем подвес каретки осуществлен посредством роликов (см. WO №2016150561 А).
Также известен модуль преобразования энергии ветра для рельсового пути, содержащий тележку, выполненный с возможностью перемещения по рельсовому пути, парусный приемник ветровой энергии, установленный на тележке, и механический генератор электроэнергии (см. ЕР №2078853 А1).
Также известен модуль преобразования энергии ветра для направляющего полотна, содержащий тележку, выполненную с возможностью перемещения по рельсовому пути за счет энергии ветра, приемники энергии в виде крыльев с аэродинамическим профилем, установленные на тележке, механические приводы ориентации крыловых профилей относительно ветра и корпуса (см. FR №2297333 А1).
Также известен модуль преобразования энергии ветра для направляющего полотна, содержащий корпус, выполненный с возможностью перемещения по направляющему полотну, по меньшей мере, один приемник ветровой энергии, установленный на корпусе, привод ориентации приемника ветровой энергии относительно ветра и корпуса, систему управления, содержащую алгоритм работы и выполненную с возможностью изменения сил создаваемых ветром при обдуве приемника ветровой энергии с помощью №привода ориентации приемника ветровой энергии и устройство генерации электроэнергии, жестко установленное в корпусе (см. WO №2016154757 А1).
Общими недостатками известных из уровня техники технических решений, являются:
- невозможность управления скоростью движения модуля, что приводит к невозможности получить максимальный коэффициент использования энергии ветра модулем для каждого момента времени в условиях изменяющегося воздушного потока.
- узкий диапазон скоростей ветра, при которых система эффективна, ввиду невозможности изменения площади крыльев и изменения установленной мощности генератора. Традиционный ветряк работает в оптимальном режиме, по некоторым оценкам, не более 15% времени. В остальные дни ветер для него слишком слабый, иногда слишком сильный.
- достижение эффективного режима работы только при высокой быстроходности, следствием чего являются, создание мощных инфразвуковых волн, опасность для животных и людей, массовая гибель птиц, необходимость создания зоны отчуждения вокруг установки;
- высокая нагруженность элементов конструкции, что вынуждает применять дорогостоящие конструкционные материалы и технологии.
- большие габариты и масса деталей конструкции, для транспортировки и монтажа которых требуется проведение уникальных транспортных и монтажных операций.
- низкая ремонтопригодность конструкций, для замены любой крупной детали требуется повторное проведение уникальных транспортных и монтажных операций.
- потеря работоспособности конструкции при выходе из строя любой детали, что вызывает простой до полного завершения ремонта.
Наиболее близким к предложенному является модуль преобразования энергии ветра, содержащий корпус, выполненный с возможностью перемещения по направляющему полотну по меньшей мере один приемник ветровой энергии в виде воздушного змея, установленный на корпусе, привод ориентации приемника ветровой энергии относительно ветра и корпуса, систему управления, а также устройство генерации электроэнергии, выполненное с возможностью выработки электроэнергии при движении корпуса по направляющему полотну и при силовом взаимодействии с контактной направляющей, связанной с направляющим полотном (RU №2451826 С2, опубл. 27.05.2012). В известном модуле система управления выполнена с возможностью регулирования угла атаки воздушных змеев в связи с искажением формы привязного троса.
К недостаткам указанного модуля также следует отнести невозможность управления скоростью движения модуля, что приводит к невозможности получить максимальный коэффициент использования энергии ветра модулем, для каждого момента времени, в условиях изменяющегося воздушного потока.
Раскрытие изобретения
В качестве задачи заявленного технического решения положено создание модуля преобразования энергии ветра, лишенного вышеописанных недостатков и обладающего дополнительным рядом преимуществ обладающего повышенной энергетической эффективностью.
Технический результат, достигаемый заявленным техническим решением, заключается в обеспечении высокого коэффициента использования энергии ветра (КИЭВ) путем регулирования скорости движения модулей.
Технический результат достигается модулем преобразования энергии ветра, содержащим корпус, выполненный с возможностью перемещения по направляющему полотну, по меньшей мере, один приемник ветровой энергии, установленный на корпусе, привод ориентации приемника ветровой энергии относительно ветра и корпуса, систему управления, а также устройство генерации электроэнергии, выполненное с возможностью выработки электроэнергии при движении корпуса по направляющему полотну и при силовом взаимодействии с контактной направляющей, связанной с направляющим полотном, при этом, согласно изобретению, система управления выполнена с возможностью изменения скорости движения модулей путем изменения тормозящего усилия устройства генерации электроэнергии.
Возможны частные случаи выполнения модуля:
- приемник ветровой энергии предпочтительно выполнен в виде крылового профиля;
- при этом приемник ветровой энергии может быть выполнен в виде крыла с изменяющимся аэродинамическим профилем и/или площадью;
- приемник ветровой энергии может также быть выполнен в виде, по меньшей мере, одного паруса;
- приемник ветровой энергии может быть выполнен в виде крыла с составным аэродинамическим профилем, включающим в себя основной профиль, и, по меньшей мере, один поворотный закрылок;
- приемник ветровой энергии предпочтительно прикреплен к корпусу своей средней частью, таким образом, что консольная нагрузка на корпус от приемника ветровой энергии, при обдуве ветром, скомпенсирована;
- при горизонтальном движении модуля по направляющему полотну приемник ветровой энергии ориентирован вертикально;
- при вертикальном движении модуля по направляющему полотну приемник ветровой энергии ориентирован горизонтально;
- корпус может быть выполнен с возможностью перемещения по рельсовому пути, в частности, по монорельсу;
- возможность перемещения корпуса по направляющему полотну может быть реализована посредством магнитного подвеса;
- устройство генерации электроэнергии может представлять собой электрический генератор роторного типа, при этом силовое взаимодействие с контактной направляющей, связанной с направляющим полотном, является механическим;
- в другом варианте устройство генерации электроэнергии может представлять собой подвижную часть линейного электрогенератора, при этом силовой взаимодействие с контактной направляющей, связанной с направляющим полотном, является электромагнитным;
- подвижная часть линейного электрогенератора может быть выполнена в виде короткой рейки с возможностью выработки электроэнергии при движении модуля посредством электромагнитного взаимодействия с контактной направляющей, выполненной в виде рейки из магнитомягкой стали с обмотками на зубцах;
- при этом система управления содержит электронный блок управления, выполненный с возможностью подмагничивания зубцов короткой рейки и зубчатой рейки контактной направляющей;
- механическое силовое взаимодействие может быть выполнено посредством зубчатой передачи, образованной зубчатым колесом и контактной направляющей, выполненной в виде неподвижной зубчатой рейки;
- устройство генерации электроэнергии может быть выполнено в виде генератора вентильно-индукторного типа;
- система управления может быть выполнена с возможностью перевода устройства генерации электроэнергии в режим мотора;
- на корпусе могут быть установлены датчик измерения скорости ветра и датчик направления ветра;
- при этом система управления выполнена с возможностью получения информации с датчиков и ориентирования оптимальным образом приемника ветровой энергии посредством привода ориентации приемника ветровой энергии, в соответствии с алгоритмом, использующим информацию с датчиков;
- привод приемника ветровой энергии предпочтительно представляет собой сервопривод;
- система управления может содержать вспомогательный аэродинамический регулятор для изменения ориентации приемника ветровой энергии;
- система управления может быть выполнена также с возможностью изменения аэродинамического профиля, и/или изменения площади крыла, вплоть до перевода во флюгерный режим;
- корпус содержит установленное на нем снегоуборочное оборудование для очистки направляющего полотна и контактной направляющей.
Частные случаи реализации заявленного технического решения не ограничиваются вышеуказанными частными случаями.
Сущность заявленного технического решения поясняется графическими материалами:
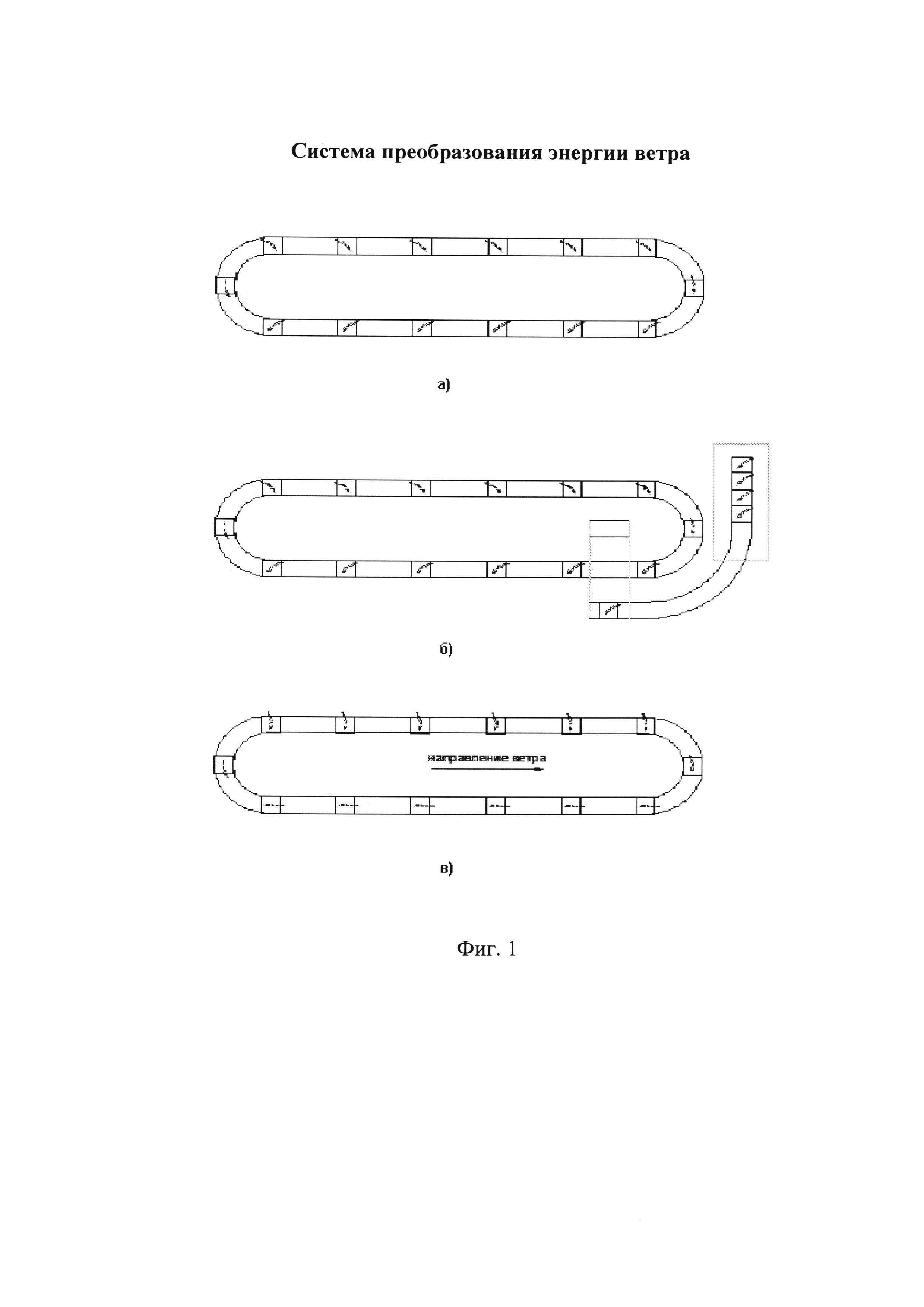
на фиг. 1 изображена общая схема системы преобразования энергии ветра совместно с модулями преобразования энергии ветра (а - базовый вариант рельсовой установки, б - вариант рельсовой установки с возможностью добавления модулей, в - вариант установки при работе с боковым ветром);
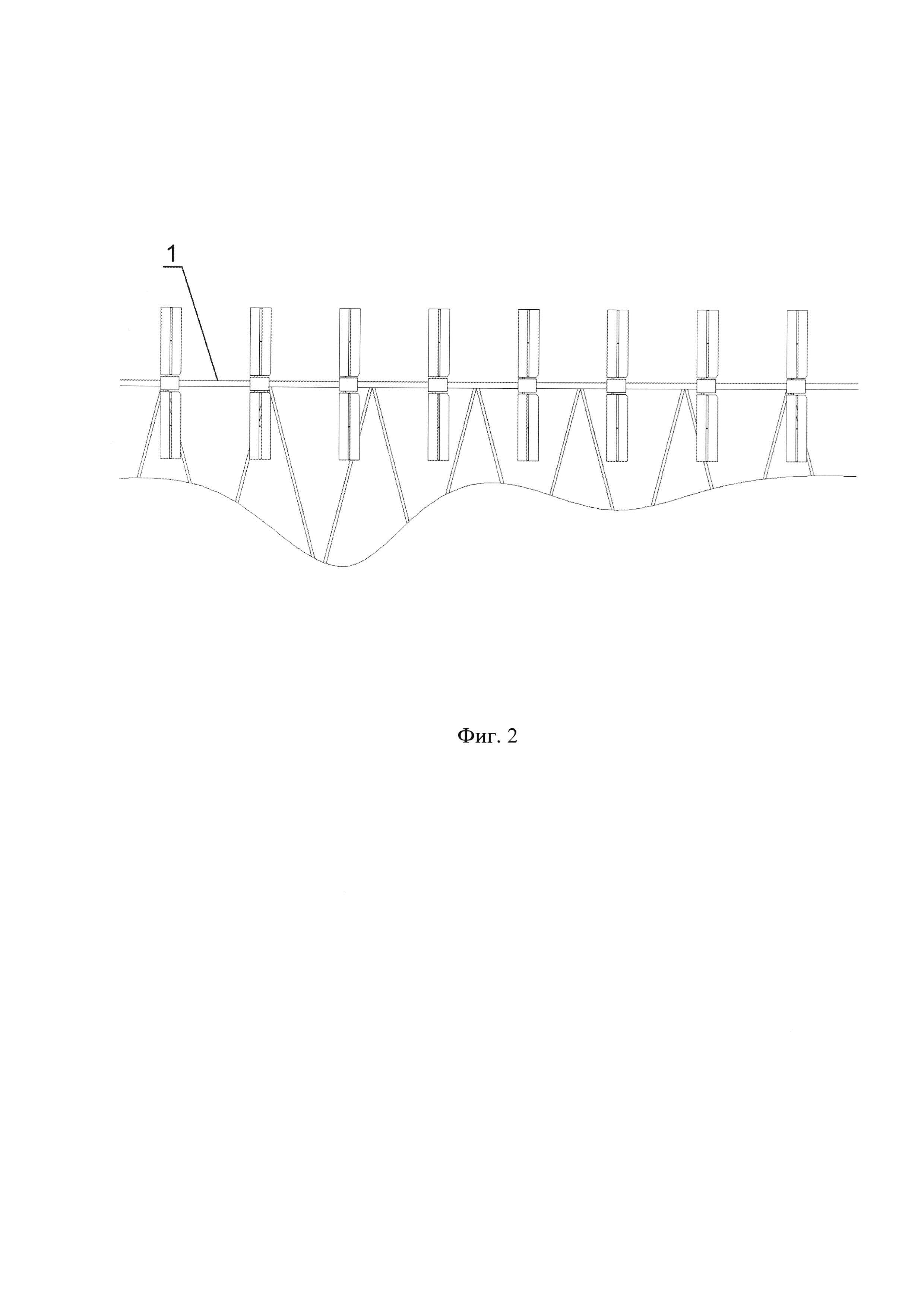
на фиг. 2 изображен вариант исполнения системы преобразования энергии ветра, где участок направляющего полотно установлен на поддерживающей конструкции в виде эстакады, при этом модули преобразования энергии ветра ориентированы вертикально;
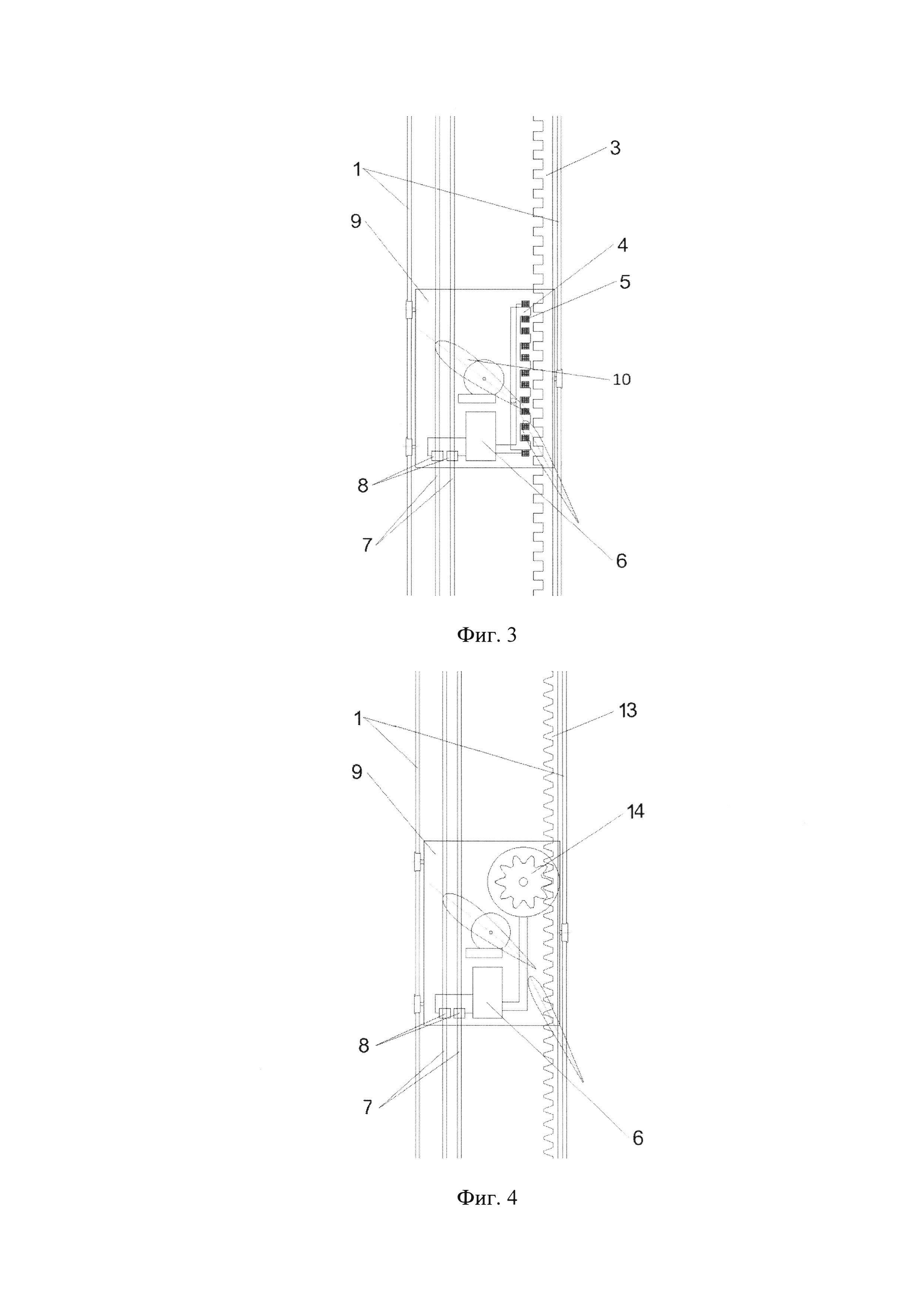
на фиг. 3 изображен вариант исполнения модуля преобразования энергии ветра, на котором устройство генерации электроэнергии представляет собой по существу подвижную часть линейного электрогенератора с возможностью электромагнитного взаимодействия с контактной направляющей, при этом подвижная часть линейного электрогенератора выполнена в виде короткой рейки, с обмотками на зубцах, с возможностью выработки электроэнергии при движении модуля посредством электромагнитного взаимодействия с контактной направляющей, выполненной в виде рейки из магнитомягкой стали;
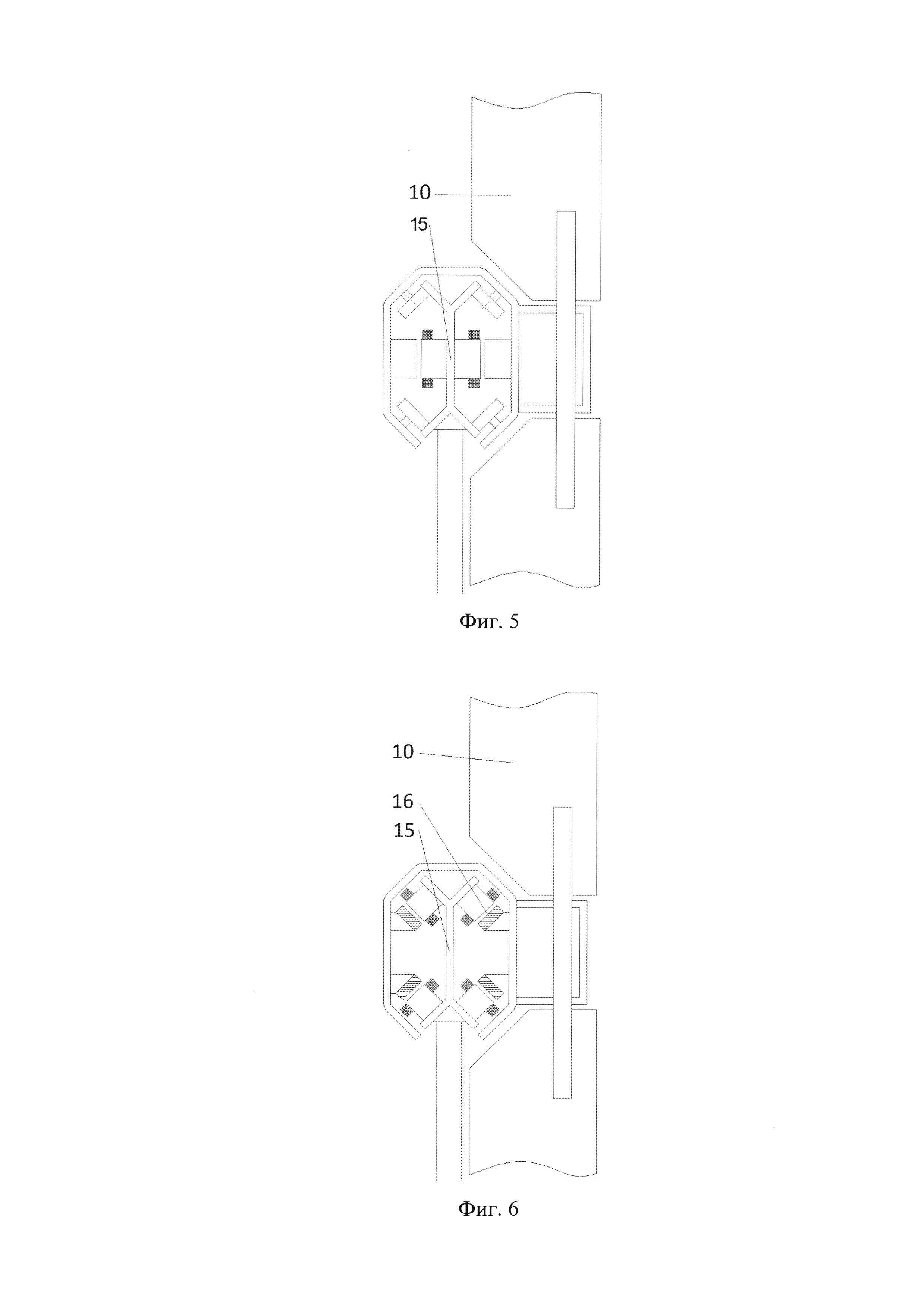
на фиг. 4 изображен вариант исполнения модуля преобразования энергии ветра, где устройство генерации электроэнергии представляет по существу электрический генератор роторного типа, при этом силовое взаимодействие является механическим и выполнено посредством зубчатой передачи, осуществляемой путем обкатывания зубчатым колесом контактной направляющей, выполненной в виде неподвижной зубчатой рейки;
на фиг. 5 изображен вариант исполнения системы преобразования энергии ветра, на котором направляющее полотно выполнено в виде монорельса;
на фиг. 6 изображен вариант исполнения модуля преобразования энергии ветра, где возможность перемещения по направляющему полотну выполнена посредством магнитного взаимодействия модулей преобразования энергии ветра с направляющим полотном;
на фиг. 7 изображен вариант исполнения модуля преобразования энергии ветра, где приемник ветровой энергии выполнен в виде крыла с симметричным составным аэродинамическим профилем, включающим в себя основной профиль, и, по меньшей мере, один поворотный закрылок;
на фиг. 8, 9 изображены различные треугольники скоростей приемников ветровой энергии.
Ниже приведены теоретические основы осуществления заявленного модуля на примере использования крыльев в качестве приемников ветровой энергии.
Возможно осуществление модуля при ориентации прямолинейного участка движения крыльев поперек воздушного потока.
Аэродинамический расчет системы показывает, что с увеличением скорости крыльев поперек потока снимаемая с одного квадратного метра мощность растет вплоть до высоких скоростей (от 15 до 200 м/с в зависимости от аэродинамического качества крыла).
Зависимость примерно линейная.
При этом степень нагруженности конструкции крыльев тоже растет.
Основной критерий влияния в данном случае - быстроходность (отношение скорости движения крыла поперек потока к скорости ветра).
При быстроходности меньше 2 аэродинамическое качество крыла играет небольшую роль, большую роль играет несущая способность профиля крыла, при быстроходности больше 2 аэродинамическое качество становится важным, при величине больше 5 - критически важным. При этом, чем меньше быстроходность крыла, тем больше скос потока.
В проектируемой установке скорость движения крыла должна быть ограничена:
10…15 м/с - по соображениям безопасности, экологичности среды обитания, психологического комфорта;
60 м/с - по аэродинамическому шуму;
5…30 м/с - по центробежным перегрузкам при прохождении поворота.
Практически, при организации управления установкой, следует стремится к наибольшей скорости движения крыла с учетом указанных ограничений.
Способность крыла создавать аэродинамические силы зависит от угла установки крыла относительно местного воздушного потока. Местный (в районе крыла) воздушный поток отличается от естественного потока ветра на векторные величины скорости крыла, торможение и скоса потока ветрогенератором.
Параметры, по которым происходит регулирование
Входные:
- скорость вымпельного ветра;
- направление вымпельного ветра;
- скорость истинного ветра;
- направление истинного ветра;
- скорость модуля;
- расстояние до ближайших модулей;
- проход модулем точки разворота движения.
Управляемые параметры:
- угол установки крыла относительно вымпельного ветра;
- угол установки закрылка относительно основного профиля крыла (при использовании крыла с закрылком);
- площадь крыла;
- скорость движения модуля.
Параметры и способы регулирования:
Угол установки крыла относительно вымпельного ветра устанавливается с помощью сервопривода поворота крыла, либо с помощью управляемой сервоприводом вспомогательной аэродинамической поверхности (стабилизатора). Вымпельный ветер - это ветер, воспринимаемый непосредственно движущимся крылом, результат сложения всех векторов скоростей, возникающих при работе ветрогенератора, с вектором истинного ветра.
Задача регулирования - выдерживать постоянный оптимальный угол установки крыла относительно меняющегося вымпельного ветра, при достижении предельной для крыла аэродинамической силы при усилении ветра плавно уменьшать угол установки по алгоритму (например, 1° на 1 м/с ветра). При повороте модуля из наветренного ряда в подветренный ряд сервопривод разворачивает угол установки крыла на противоположный для разворота вектора тяги крыла. Исходные данные предоставляют датчик направления, датчик скорости ветра, и датчик прохождения точки разворота. В случае использования сервостабилизатора, он является датчиком направления ветра, и аэродинамическим усилителем одновременно.
Угол установки закрылка относительно основного профиля крыла (при использовании крыла с закрылком) устанавливается с помощью сервопривода поворота закрылка либо с помощью управляемой сервоприводом вспомогательной аэродинамической поверхности (стабилизатора).
Задача регулирования - выдерживать постоянный оптимальный угол установки закрылка относительно основного профиля крыла, при достижении предельной для крыла аэродинамической силы при усилении ветра, плавно уменьшать угол установки по алгоритму (например, 3° на 1 м/с ветра). При повороте модуля из наветренного ряда в подветренный ряд сервопривод разворачивает угол установки закрылка на противоположный для разворота вектора тяги крыла. Исходные данные предоставляют датчик направления, датчик скорости ветра, датчик прохождения точки поворота. В случае использования сервостабилизатора он является датчиком направления ветра и аэродинамическим усилителем одновременно и выполняет две функции - управление углом установки закрылка и управление углом установки крыла в целом.
Площадь крыла устанавливается системой в зависимости от конкретных ветровых условий для достижения оптимальной величины суммарной площади работающих крыльев в случае, если в системе не используется изменение числа работающих модулей, а электрогенераторы имеют запас мощности.
Скорость движения модуля регулируется с помощью изменения тормозящего усилия генератора. Тормозящий момент генератора изменяется с помощью электронного управления генератором от полного торможения до отрицательной величины, т.е. до перехода в моторный режим. Генератор обеспечивает торможение, преобразуя механическую мощность движения в электрическую мощность. При полном торможении механическая мощность равна нулю из-за отсутствия скорости. При нулевом торможении скорость максимальна, но механическая мощность также равна нулю из-за отсутствия усилия. Между этими двумя крайностями для каждых ветровых условий существует точка оптимальности, в которой механическая мощность и электрическая мощность максимальны. Система управления генератором изменяет отбираемую генератором мощность и, следовательно, создаваемый генератором тормозящий момент с помощью электронного регулирования подаваемых на катушки генератора и снимаемых с катушек импульсов тока. В простейшем случае катушки генератора работают непосредственно на сеть переменного тока, при этом автоматически обеспечивается синхронизация скорости перемещения модулей с частотой сети переменного тока.
Задачи регулирования:
- обеспечить максимально возможный коэффициент использования энергии ветра (КИЭВ) установкой в целом. Для каждой суммарной площади крыльев существует оптимальная быстроходность (отношение скорости движения крыла вдоль полотна к скорости истинного ветра), при которой КИЭВ ветрогенератора максимален. Система управления скоростью получает данные с датчиков скорости и направления истинного или вымпельного ветра, данные с датчиков скорости движения модуля, данные о положении других модулей, регулирует тормозящий момент генератора, стремясь постоянно поддерживать оптимальную быстроходность, с учетом следующих ограничений: максимально допустимая скорость на данном участке полотна, равномерность распределения модулей по полотну, предотвращение столкновения модулей, необходимость поддерживать заданную частоту вырабатываемого переменного тока, необходимость учитывать скорость, на которой электрический КПД генератора максимален.
- обеспечить возможность страгивания модулей при старте. Большинство генераторов имеют значительное усилие страгивания, которое не позволяет ветрогенератору стартовать при слабом ветре. Вентильно-индукторная технология позволяет системе управления, получающей данные от датчика скорости модуля, свести к минимуму усилие страгивания для облегчения старта.
- обеспечить аварийную остановку модулей. При превышении скорости ветра границы безопасной работы, управляющая система, получающая данные от датчиков скорости истинного или вымпельного ветра, выполняет полное торможение генераторов всех модулей.
- обеспечить выполнение транспортных операций: ввод модулей на полотно, вывод модулей с полотна, транспортировка модулей в депо.
Модуль преобразования энергии ветра содержит корпус 9, выполненный с возможностью перемещения по направляющему полотну 1, по меньшей мере, один приемник 10 ветровой энергии, воспринимающий энергию ветра, установленный на корпусе 9. При этом приемник 10 ветровой энергии может быть выполнен в виде крылового профиля или, по меньшей мере, одного паруса, или в виде в виде крыла с составным аэродинамическим профилем, включающим в себя основной профиль, и, по меньшей мере, один поворотный закрылок. Также возможно то, что приемник 10 ветровой энергии прикреплен к корпусу 9 своей средней частью, таким образом, что консольная нагрузка на корпус 9 от приемника 10 ветровой энергии при обдуве ветром оказывается скомпенсированной. При возможном движении модуля для преобразования энергии ветра вертикально по направляющему полотну 1 приемник 10 ветровой энергии ориентирован горизонтально. А при возможном движении модуля для преобразования энергии ветра горизонтально по направляющему полотну 1 приемник 10 ветровой энергии ориентирован вертикально. При этом сам корпус 9 может быть выполнен с возможностью перемещения по рельсовому пути или монорельсу. Может быть предусмотрена возможность перемещения корпуса 9 по направляющему полотну 1 посредством магнитного подвеса (фиг. 6).
Привод ориентации (не показан) приемника 10 ветровой энергии относительно ветра и корпуса 9, содержит систему управления, содержащую алгоритм работы и выполненную с возможностью изменения сил, создаваемых ветром при обдуве приемника 10 ветровой энергии, с помощью привода ориентации приемника 10 ветровой энергии, а также устройство 6 генерации электроэнергии, жестко установленное в корпусе 9. Привод ориентации приемника 10 ветровой энергии может быть выполнен в виде сервопривода.
При этом устройство 6 генерации электроэнергии может представлять собой по существу подвижную часть линейного электрогенератора (фиг. 3), с возможностью электромагнитного взаимодействия с контактной направляющей 3, при этом подвижная часть линейного электрогенератора выполнена в виде короткой рейки 4 с обмотками на зубцах 5, с возможностью выработки электроэнергии при движении модуля посредством электромагнитного взаимодействия с контактной направляющей 3 и отдачи в сеть электроэнергии про проводам 7 через контактные устройства 8, выполненной в виде рейки из магнитомягкой стали. Также устройство 6 генерации электроэнергии 6 может представлять по существу электрический генератор роторного типа (фиг. 4), при этом силовое взаимодействие является механическим, а механическое силовое взаимодействие выполнено посредством зубчатой передачи, осуществляемой путем обкатывания зубчатым колесом 14 контактной направляющей, выполненной в виде неподвижной зубчатой рейки 13, и отдачи в сеть электроэнергии про проводам 7 через контактные устройства 8, выполненный в виде рейки из магнитомягкой стали. Возможно также выполнение устройства 6 генерации электроэнергии в виде генератора вентильно-индукторного типа.
При этом в любом случае система управления может быть выполнена с возможностью изменения силового взаимодействия устройства 6 генерации электроэнергии и контактной направляющей 3. Система управления может быть выполнена с возможностью перевода устройства 6 генерации электроэнергии в режим мотора.
Система управления может получать информацию с датчиков и ориентировать оптимальным образом приемник 10 ветровой энергии посредством привода ориентации приемника 10 ветровой энергии в соответствии с алгоритмом, использующим информацию с датчиков. Возможно использование датчиков, таких как установленные на корпусе 9 датчик измерения скорости ветра и датчик направления ветра (не показаны). Также система управления может содержать вспомогательный аэродинамический регулятор (не показан) для изменения ориентации приемника 10 ветровой энергии. Система управления в случае превышения заданной алгоритмом скорости ветра может уменьшать аэродинамические силы с помощью изменения углов установки приемника ветровой энергии 10 относительно ветра вплоть до перевода во флюгерный режим.
Для различных скоростей ветра система управления может задавать оптимальный аэродинамический профиль и площадь крыла.
Модули в составе системы преобразования энергии ветра работают следующим образом.
При обдуве ветром приемников 10 ветровой энергии, закрепленных на модулях, возникает аэродинамическая сила. Эта сила перемещает модуль по направляющему полотну 1, при этом приемник 10 ветровой энергии постоянно ориентируется по направлению ветра для создания наилучшей тяги на каждом участке направляющего полотна в зависимости от направления ветра. Устройство 6 генерации электроэнергии взаимодействует с контактной направляющей 3, которая в свою очередь связана с направляющим полотном 1. В результате совершения работы силой, возникшей при взаимодействии устройства 6 генерации и контактной направляющей 3, устройство генерации 6 вырабатывает электрический ток, который в свою очередь отдается в сеть, проложенную вдоль направляющего полотна 1. При этом в зависимости от параметров вырабатываемого электричества система управления производит непрерывное регулирование скорости самого модуля, поскольку устройство 6 генерации является, по сути, тормозом для перемещения модуля под действием силы ветра. Также система управления осуществляет регулирование количества модулей, выведенных в конкретный момент времени на направляющее полотно 1. При этом, например, для диагностики или технического обслуживания модуля, его загоняют в депо без остановки всей системы и всех выведенных в данный момент времени модулей. Для этого, предварительно, учтя текущее положение требуемого модуля, переключают участок полотна 1 с движения по замкнутому пути на участок, следующий в депо. При этом если ветровой энергии в данный момент или на данном участке не хватает для такого маневра, то устройство 6 генерации электроэнергии переводится в режим по существу электродвигателя, уже потребляющего электроэнергию из сети. Аналогичным образом выводятся на направляющее полотно 1 модули, в том числе модули специального назначения, например, диагностические или снегоуборочные. Следует отметить, что вышеописанная работа системы в общем случае не зависит от того, как именно выполнено направляющее полотно 1, устройство 6 генерации электроэнергии, тип подвеса модуля на направляющем полотне 1 в частных своих случаях.
Реферат
Изобретение относится к ветровым энергетическим установкам. Модуль преобразования энергии ветра содержит корпус 9, выполненный с возможностью перемещения по направляющему полотну 1, установленные корпусе 9 по меньшей мере один приемник 10 ветровой энергии, привод ориентации приемника 10 ветровой энергии относительно ветра и корпуса 9 и систему управления, а также устройство 6 генерации электроэнергии, выполненное с возможностью выработки электроэнергии при движении корпуса 1 по направляющему полотну 1 и при силовом взаимодействии с контактной направляющей 3, связанной с направляющим полотном 1. Система управления выполнена с возможностью изменения скорости движения модулей путем изменения тормозящего усилия устройства 6 генерации электроэнергии. Изобретение направлено на повышение коэффициента использования энергии ветра путем регулирования скорости движения модулей. 22 з.п. ф-лы, 9 ил.
Формула
Документы, цитированные в отчёте о поиске
Ветровая система для преобразования энергии за счет поступательного перемещения по направляющей модулей, буксируемых воздушными змеями, и способ производства электрической энергии
Ветровая система для преобразования энергии посредством перемещения на рельсе модулей, буксируемых кайтами, и процесс для выработки электрической энергии посредством такой системы
Комментарии