Ветровая система для преобразования энергии за счет поступательного перемещения по направляющей модулей, буксируемых воздушными змеями, и способ производства электрической энергии - RU2451826C2
Код документа: RU2451826C2
Чертежи


Описание
Настоящее изобретение относится к ветровой системе для преобразования энергии за счет поступательного перемещения по направляющей модулей, буксируемых воздушными змеями. Кроме того, настоящее изобретение относится к способу производства электрической энергии при помощи этой системы.
В прошлом уже пытались решить проблему производства электричества с низкой стоимостью с использованием возобновляемых источников энергии, в частности в некоторых ранее выданных патентах, которые указаны ниже, предложены способы преобразования энергии ветра вместе с несколькими устройствами, которые извлекают энергию из ветра при помощи силовых конструкций в виде крыльев (в общем обозначаемых термином "воздушный змей").
В частности, в документе US 4.124.182 описано устройство, снабженное "парашютами-змеями" (или "модифицированными парашютами"), чтобы захватить энергию ветра и преобразовать ее во вращательное движение вала, который приводит в действие генератор. Это устройство отличается наличием пары "цепочек парашютов-змеев", в которых воздушные змеи установлены последовательно. Каждая цепочка снабжена силовым тросом. Такие канаты имеют достаточную длину, чтобы позволить цепочкам парашютов-змеев достигать высот, на которых дуют более сильные и более равномерные ветры по сравнению с теми, которые дуют на уровне поверхности Земли. Каждая цепочка связана соответствующим силовым тросом с барабаном или лебедкой, направление вращения которой можно изменять на противоположное, в результате чего они повторно наматывают тросы или позволяют их разматывать в зависимости от тяги струи ветра. Каждая цепочка парашютов-змеев колпакового типа А снабжена вторым тросом, который соединен с каждым из воздушных змеев цепочки и при помощи которого можно выборочно складывать парашюты-змеи, чтобы облегчить процедуру повторного наматывания. Через редуктор вращательное движение каждой лебедки передается на генератор, который при его приведении в действие производит электричество. Имеется единая система шкивов, которая через муфты и зубчатые колеса позволяет возвратить в исходное состояние одну цепочку парашютов-змеев, в то время как другая набирает высоту. Захваченная энергия ветра, таким образом, преобразуется в механическую энергию, которая отчасти сразу расходуется на возврат в исходное положение цепочки парашютов-змеев, ее колпак закрыт, а отчасти преобразуется в электроэнергию. При помощи аэростата, связанного с каждой цепочкой, который наполняется и спускается в каждом рабочем цикле, парашют-змей удерживается на требуемой высоте и крышки имеют фиксированную ориентацию.
В патенте Китая CN 1.052.723 описан ветровой генератор тока, снабженный парой воздушных змеев, при помощи которых тяга, создаваемая струями ветра, преобразуется через прочные тросы во вращение барабана, размещенного на уровне земли. Лебедка приводит в действие гидравлический двигатель, который создает электрический ток.
В патенте Великобритании GB 2.317.422 описано устройство, снабженное множеством воздушных змеев, которые благодаря воздействию ветра приводят во вращение вертикальный вал, соединенный с генератором, служащим для создания электрического тока. Ветер толкает воздушные змеи, перемещая их по окружности в горизонтальной плоскости. Каждый воздушный змей снабжен устройством, способным изменять угол атаки ветра, чтобы гарантировать непрерывность полета.
В патенте США US 6.072.245 описано устройство, использующее энергию ветра, которое состоит из множества воздушных змеев, соединенных с тросами с образованием кольца. Воздушными змеями управляют таким образом, чтобы чередовать набор и потерю ими высоты, что определяет вращательное движение кольца всегда в одном направлении. Каждый воздушный змей соединен с силовым тросом для передачи механической энергии и с системой управляющих тросов, служащих для регулировки угла атаки ветра для каждого воздушного змея. Силовой трос задает вращение шкивов, при помощи которых осуществляется производство электричества. Управляющие тросы используются для того, чтобы каждый воздушный змей принимал положение, которое при наборе им высоты приводило к его захватыванию ветром в направлении вверх, и другое положение при потере высоты, чтобы на воздушный змей воздействовало меньшее давление ветра.
В патенте США US 6.254.034 описано устройство, снабженное воздушным змеем ("привязным летательным аппаратом"), которое выталкивается струями ветра на контролируемую высоту, чтобы использовать энергию ветра. Воздушный змей через трос соединен с лебедкой, которая приводит в действие генератор, служащий для производства электрической энергии. На борту воздушного змея смонтирована система управления, которая определяет и изменяет угол атаки ветра, а также изменяет перехватываемую площадь ветрового фронта. Такая система контролируется с земли оператором, который считывает с дисплея данные, передаваемые подходящими датчиками, либо автоматически при помощи системы дистанционного управления. Воздушным змеем управляют таким образом, чтобы он набирал высоту при полете в направлении ветра с большим углом атаки. После завершения набора высоты угол атаки уменьшают, и воздушный змей скользит таким образом, чтобы оказаться во встречном потоке ветра. Воздушный змей возвращается в исходное состояние, снова скользит в направлении ветра, и цикл повторяется.
В патенте Голландии NL1017171C описано устройство, аналогичное предыдущему из рассмотренных выше, в котором, однако, не предусмотрен режим ручного управления и в котором возврат воздушного змея в исходное положение происходит за счет наклона воздушного змея как флага, чтобы снизить до минимума давление ветра при повторном наматывании тросов.
В патенте США US 6.523.781 описано устройство, состоящее из воздушного змея ("воздушного змея с аэродинамическим профилем"), при помощи которого захватывают энергию ветра и имеющего передний край, задний край и два боковых края. Таким воздушным змеем управляют при помощи механизма, который установлен на самом змее. Это устройство снабжено тросами, соединенными с краями воздушного змея, и воздушным змеем управляют путем изменения угла установки при помощи этих тросов. Питание к механизму управления подается через электрические кабели, размещенные внутри силового троса, который соединяет воздушный змей с лебедкой, приводящей в действие генератор, служащий для производства электричества. Воздушный змей набирает высоту, толкаемый ветром, используя подъемную силу и перемещаясь по траектории, почти перпендикулярной к направлению скорости ветра. После завершения набора высоты воздушный змей возвращают в исходное положение, и впоследствии управляют таким образом, чтобы он снова захватил ветер.
В заявке на патент США US2005046197 описано устройство, снабженное воздушным змеем, служащим для использования энергии ветра, которая генерирует электричество при приведении в действие посредством тросов лебедки, соединенной с генератором. Воздушным змеем управляют при помощи дополнительных тросов, посредством которых изменяют угол атаки ветра. Воздушный змей набирает высоту при большом угле атаки. После завершения набора высоты угол атаки снижают до минимума, и воздушный змей возвращается в исходное положение, чтобы начать цикл снова.
В заявке на патент Италии ТО2006А000491, принадлежащей заявителю настоящего изобретения, описана ветровая система для преобразования энергии, содержащая, по меньшей мере, один воздушный змей, которым можно управлять с земли и который погружен, по меньшей мере, в одну струю ветра, а также ветровую турбину с вертикальной осью, которая размещена на уровне земли, причем эта ветровая турбина снабжена, по меньшей мере, одним рычагом, соединенным через два троса с воздушным змеем, который выполнен с возможностью управления этой турбиной для вращения рычага и преобразования энергии ветра в электроэнергию посредством, по меньшей мере, одной системы генератора/электродвигателя, работающей как генератор, взаимодействующий с турбиной, причем тросы выполнены с возможностью как передавать механическую энергию от воздушных змеев и к воздушным змеям, так и контролировать траекторию полета этих змеев. В этой ветровой системе с рычагами и вращающимся валом производство электрической энергии происходит с использованием крутящего момента, возникающего в рычагах турбины, под действием воздушных змеев, а воздушными змеями управляют только при помощи тросов. Кроме того, в этой ветровой системе с рычагами и вращающимся валом компоненты, установленные для хранения тросов и управления воздушными змеями, находятся в центре турбины, и поэтому далеко от места, из которого тросы идут от земли в направлении воздушных змеев. И, наконец, в этой ветровой системе с рычагами и вращающимся валом установлены трубы для возврата воздушных змеев в исходное положение.
В любом случае, как можно увидеть при анализе существующего уровня техники, известные ветровые системы, снабженные воздушными змеями, в основном обладают следующими общими характеристиками:
- воздушные змеи снабжены как силовыми тросами, так и управляющими тросами - это означает, что нагрузка на тросы, посредством которых происходит производство электричества, передается не на механизмы управления воздушными змеями, а на другие компоненты ветровой системы через тросы, приспособленные для выполнения этой функции. То, что силовые тросы не используются для управления воздушными змеями, усложняет конструкцию ветровой системы со всеми связанными с этим недостатками;
- воздушные змеи управляются механизмами, которые установлены непосредственно на этих змеях, либо посредством вспомогательных (управляющих) тросов. Разматывание и повторное наматывание этих тросов выполняют при помощи лебедок, используемых исключительно для этой цели, размещенных на уровне земли или подвешенных над поверхностью земли (а именно, поддерживаемых самими воздушными змеями). В случае использования управляющих тросов, размещение лебедок на уровне земли позволяет не расходовать часть энергии, извлеченной из струй ветра, на несение веса механизмов управления;
- воздушными змеями управляют таким образом, чтобы генерировать электричество при наборе высоты за счет использования силы сопротивления (а именно, компонента давления ветра, параллельного скорости ветра). После этого этапа следует возврат воздушных змеев в исходное положение путем установки их как флагов, чтобы снизить до минимума эффект торможения. В ограниченном числе ветровых систем предложено применять подъемную силу (а именно компонент давления ветра, перпендикулярный скорости ветра) в дополнение к силе сопротивления, чтобы заставить воздушные змеи подняться. Преимущество использования этого последнего режима управления по сравнению с предыдущим заключается в применении для производства электричества не только сопротивления воздушного змея, но также и подъема воздушного змея. В любом случае, в обоих режимах рабочий цикл с прерыванием (этап набора высоты, чередующийся с этапом возврата в исходное положение) предполагает, что эффект буксирования воздушными змеями, за счет которого осуществляется производство электричества, имеет место только в течение половины траектории, описываемой воздушными змеями (фактически, он отсутствует во время возврата в исходное положение);
- преобразование энергии происходит путем приведения во вращение (посредством силовых тросов) лебедок, соединенных с генераторами, возможно, с использованием промежуточных редукторов. Это не позволяет непрерывно производить энергию в течение рабочего цикла, так как возврат воздушного змея в исходное положение выполняют, приводя в действие такие лебедки через двигатели. При этом генерация электричества прерывается, и расходуется ранее созданная энергия. Непрерывная подача электрического тока внешним пользователям становится возможной при использовании аккумуляторов;
- внимание сосредоточено исключительно на производстве электричества посредством циклического процесса. Почти полностью пренебрегают выбором траектории, которую должен описывать воздушный змей при полете, чтобы увеличить до максимума уровень преобразованной энергии;
- проблемы, относящиеся к системе управления воздушным змеем или цепочкой, состоящей из множества воздушных змеев, соединенных последовательно, на деле связаны с чрезвычайно малым числом научно-исследовательских и опытно-констукторских работ. Это также обусловлено тем, что текущие исследования сфокусированы, главным образом, на увеличении КПД уже существующих систем вместо разработки новых систем генерации энергии.
Чтобы отчасти решить указанные выше проблемы, в заявке на европейский патент ЕР 1 672 214, зарегистрированной на имя Sequoia Automation S.r.l., описана система преобразования кинетической энергии струй ветра в электрическую энергию посредством прогнозного и адаптивного контроля полета воздушных змеев, соединенных в систему типа "карусель", с использованием турбины с вертикальной осью.
Задачей настоящего изобретения является решение указанных выше проблем, связанных с известным уровнем техники, путем предложения ветровой системы для преобразования энергии за счет поступательного перемещения по направляющей модулей, буксируемых воздушными змеями, которая отличается от существующего уровня техники, в частности, режимами управления воздушными змеями, путем, проходимым такими воздушными змеями при полете, обеспечивающим увеличение до максимума уровня преобразованной энергии, и архитектурой ветровой системы, в которой каждый модуль посредством, по меньшей мере, одного троса соединен с цепочкой воздушных змеев, которая при ее толкании ветром и подходящем управлении на уровне модуля создает тягу, благодаря которой модуль поступательно перемещается, по меньшей мере, по одной направляющей, которая образует замкнутый контур, и при помощи системы генерации, работающей совместно с этим модулем и направляющей, генерирует электрическую энергию.
Другой задачей настоящего изобретения является предложить ветровую систему для преобразования энергии за счет поступательного перемещения по направляющей модулей, буксируемых воздушными змеями, в которой воздушными змеями управляет интеллектуальная система управления, заставляющая воздушные змеи при полете описывать оптимальную траекторию, чтобы оптимизировать условия извлечения энергии из ветра.
Еще одной задачей настоящего изобретения является предложить ветровую систему для преобразования энергии за счет поступательного перемещения по направляющей модулей, буксируемых воздушными змеями, в которой воздушными змеями, входящими в состав ветровой системы, предлагаемой настоящим изобретением, управляют посредством тех же тросов, при помощи которых энергия передается в модули ветровой системы.
Помимо этого, задачей настоящего изобретения является предложить ветровую систему для преобразования энергии за счет поступательного перемещения по направляющей модулей, буксируемых воздушными змеями, в которой воздушными змеями управляет интеллектуальная система управления, приводящая в действие двигатели, соединенные с лебедками (возможно, через промежуточные редукторы), размещенными у земли и составляющими единое целое с модулями ветровой системы, причем эти лебедки служат как для управления воздушными змеями путем разматывания и повторного наматывания намотанных на них тросов, так и для восприятия нагрузки на тросы для преобразования энергии.
Следующей задачей настоящего изобретения является предложить ветровую систему для преобразования энергии за счет поступательного перемещения по направляющей модулей, буксируемых воздушными змеями, в которой воздушными змеями управляют таким образом, чтобы сделать возможным преобразование энергии, главным образом, за счет использования подъемной силы и чтобы создать траекторию, при движении по которой эффект буксирования присутствует в течение почти всего рабочего цикла.
Еще одной задачей настоящего изобретения является предложить ветровую систему для преобразования энергии за счет поступательного перемещения по направляющей модулей, буксируемых воздушными змеями, в которой преобразование энергии выполняют при помощи генераторов, приводимых в действие не за счет вращения лебедок, а за счет поступательного перемещения модулей ветровой системы.
Следующей задачей настоящего изобретения является предложить ветровую систему для преобразования энергии за счет поступательного перемещения по направляющей модулей, буксируемых воздушными змеями, содержащую кольцевую направляющую, по меньшей мере, с одним модулем, который поступательно перемещается, по меньшей мере, по одной направляющей, и преобразующую энергию за счет использования поступательного перемещения модулей благодаря эффекту буксирования воздушными змеями, соединенными с упомянутыми модулями.
Еще одной задачей настоящего изобретения является предложить ветровую систему для преобразования энергии за счет поступательного перемещения по направляющей модулей, буксируемых воздушными змеями, в которой воздушными змеями, входящими в состав системы, можно также управлять при помощи интерцепторов, размещенных на борту этих змеев, создавая турбулентность, приводящую к возникновению градиентов давления.
Следующей задачей настоящего изобретения является предложить ветровую систему для преобразования энергии за счет поступательного перемещения по направляющей модулей, буксируемых воздушными змеями, в которой компоненты, предусмотренные для хранения тросов и управления цепочкой воздушных змеев, располагают на борту каждого модуля рядом с системами возврата воздушных змеев в исходное положение.
Помимо этого, задачей настоящего изобретения является предложить ветровую систему для преобразования энергии за счет поступательного перемещения по направляющей модулей, буксируемых воздушными змеями, в которой концевую часть систем возврата воздушных змеев в исходное положение можно ориентировать с возможностью поворота как в горизонтальной, так и в вертикальной плоскости.
Еще одной задачей настоящего изобретения является предложить способ производства электрической энергии при помощи ветровой системы, соответствующей настоящему изобретению, которую приводят в действие более эффективным образом по сравнению с тем, что предлагается при существующем уровне техники.
Упомянутые выше и другие задачи и преимущества этого изобретения, как следует из приведенного далее описания, достигаются с использованием ветровой системы для преобразования энергии за счет поступательного перемещения по направляющей модулей, буксируемых воздушными змеями, которая указана в п.1 формулы изобретения.
Кроме того, упомянутые выше и другие задачи и преимущества этого изобретения достигаются с использованием способа производства электрической энергии при помощи системы, соответствующей настоящему изобретению, который указан по п.197 формулы изобретения.
Предпочтительные варианты реализации и неочевидные модификации настоящего изобретения являются предметом зависимых пунктов формулы изобретения.
Далее настоящее изобретение будет описано более подробно на основе некоторых из предпочтительных вариантов его реализации, приведенных в качестве примера, не ограничивающего объем этого изобретения, со ссылкой на приложенные чертежи, на которых:
Фиг.1 - общий вид предпочтительного варианта ветровой системы, соответствующей настоящему изобретению;
Фиг.2 - общий вид в увеличенном масштабе предпочтительного варианта одного из компонентов ветровой системы, показанной на Фиг.1;
Фиг.3 - общий вид в увеличенном масштабе предпочтительного варианта другого компонента ветровой системы, показанной на Фиг.1;
Фиг.4 - еще один общий вид компонента, показанного на Фиг.3;
Фиг.5 - общий вид в увеличенном масштабе ветровой системы, показанной на Фиг.1;
Фиг.6 - еще один общий вид в увеличенном масштабе ветровой системы, показанной на Фиг.1;
Фиг.7 - общий вид в увеличенном масштабе предпочтительного варианта другого компонента ветровой системы, показанной на Фиг.1;
Фиг.8 - общий вид в увеличенном масштабе предпочтительного варианта еще одного компонента ветровой системы, показанной на Фиг.1;
Фиг.9 - общий вид в увеличенном масштабе компонента, показанного на Фиг.8;
Фиг.10 - общий вид предпочтительной модификации ветровой системы, соответствующей настоящему изобретению;
Фиг.11 - общий вид в увеличенном масштабе ветровой системы, показанной на Фиг.10;
Фиг.12 - общий вид в увеличенном масштабе предпочтительного варианта одного из компонентов ветровой системы, показанной на Фиг.10;
Фиг.13 - еще один общий вид компонента, показанного на Фиг.12;
Фиг.14 - общий вид в увеличенном масштабе предпочтительного варианта другого компонента ветровой системы, показанной на Фиг.10;
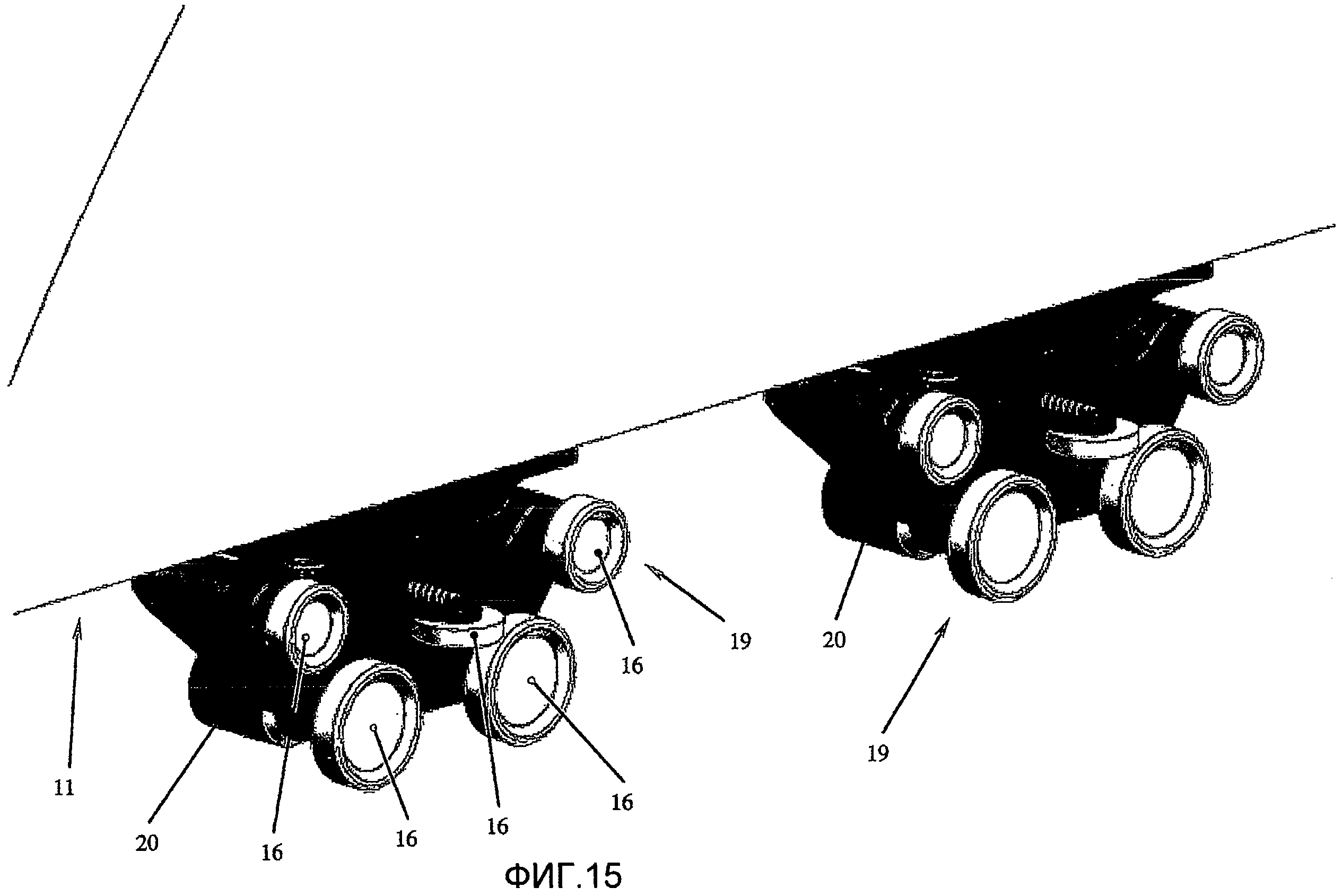
Фиг.15 - общий вид в увеличенном масштабе предпочтительного варианта еще одного компонента ветровых систем, показанных на Фиг.1 и Фиг.10;
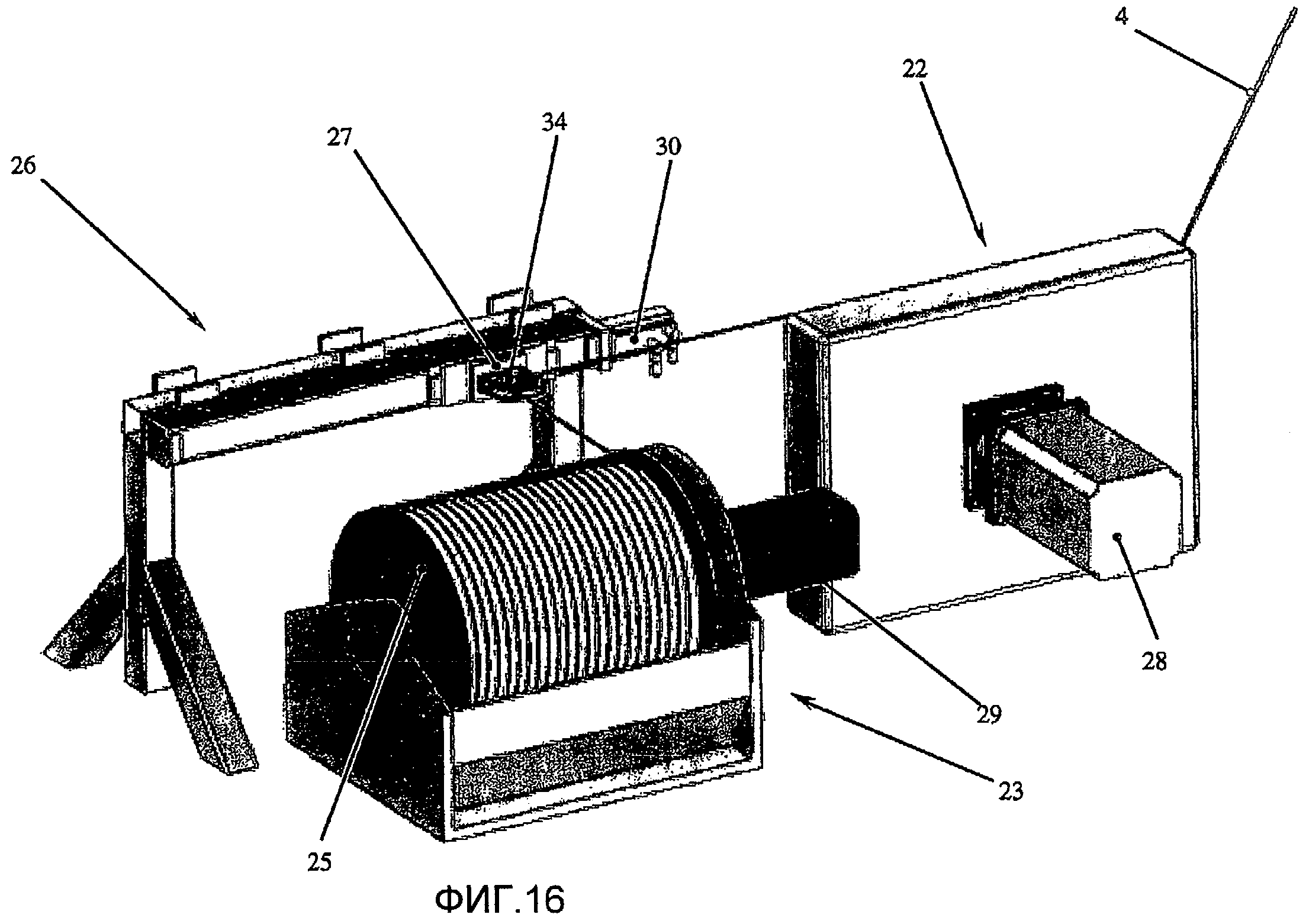
Фиг.16 - общий вид в увеличенном масштабе предпочтительного варианта других компонентов ветровых систем, показанных на Фиг.1 и Фиг.10;
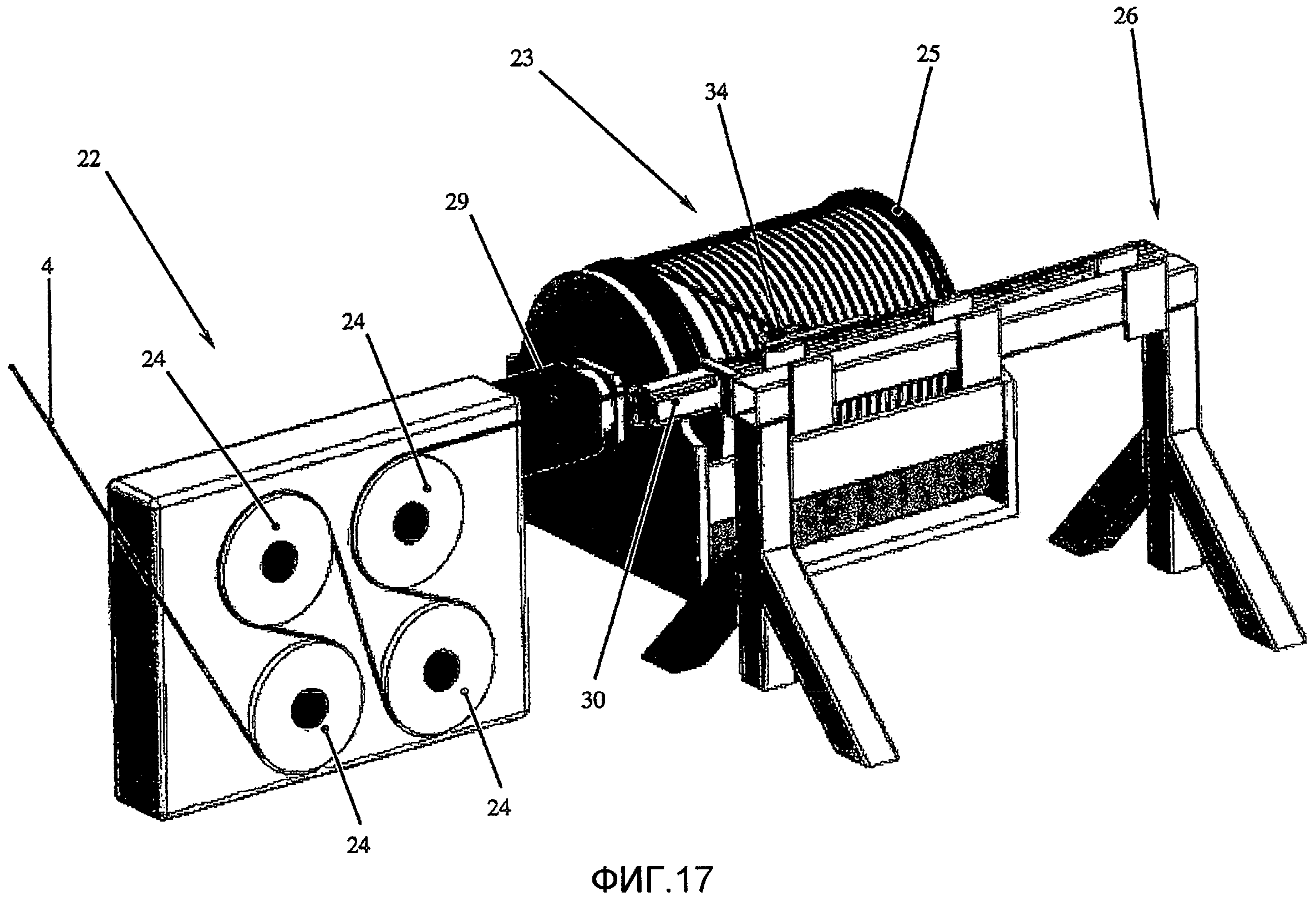
Фиг.17 - еще один общий вид в увеличенном масштабе компонентов, показанных на Фиг.16;
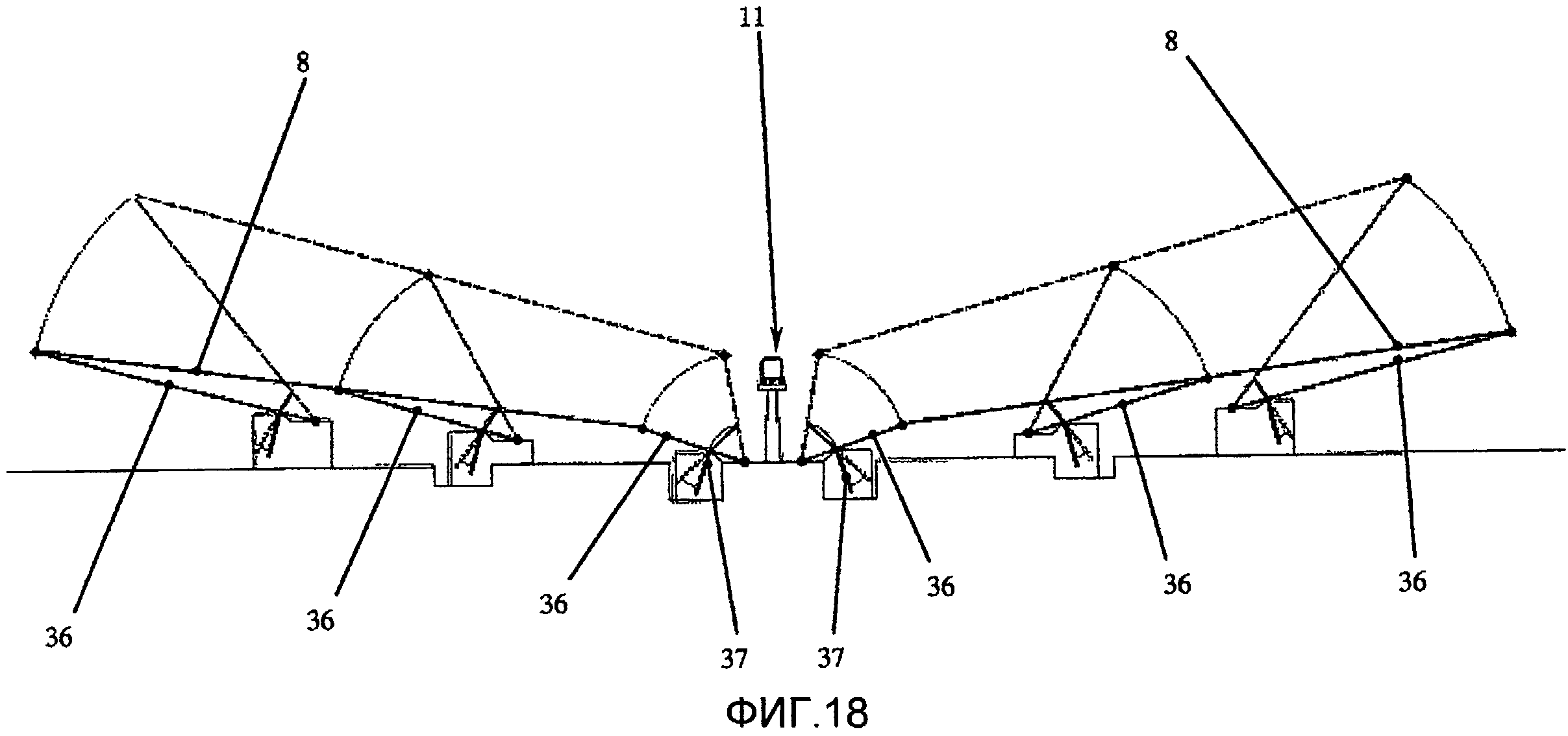
На Фиг.18 схематично показана другая предпочтительная модификация ветровой системы, соответствующей настоящему изобретению, на двух этапах ее работы;
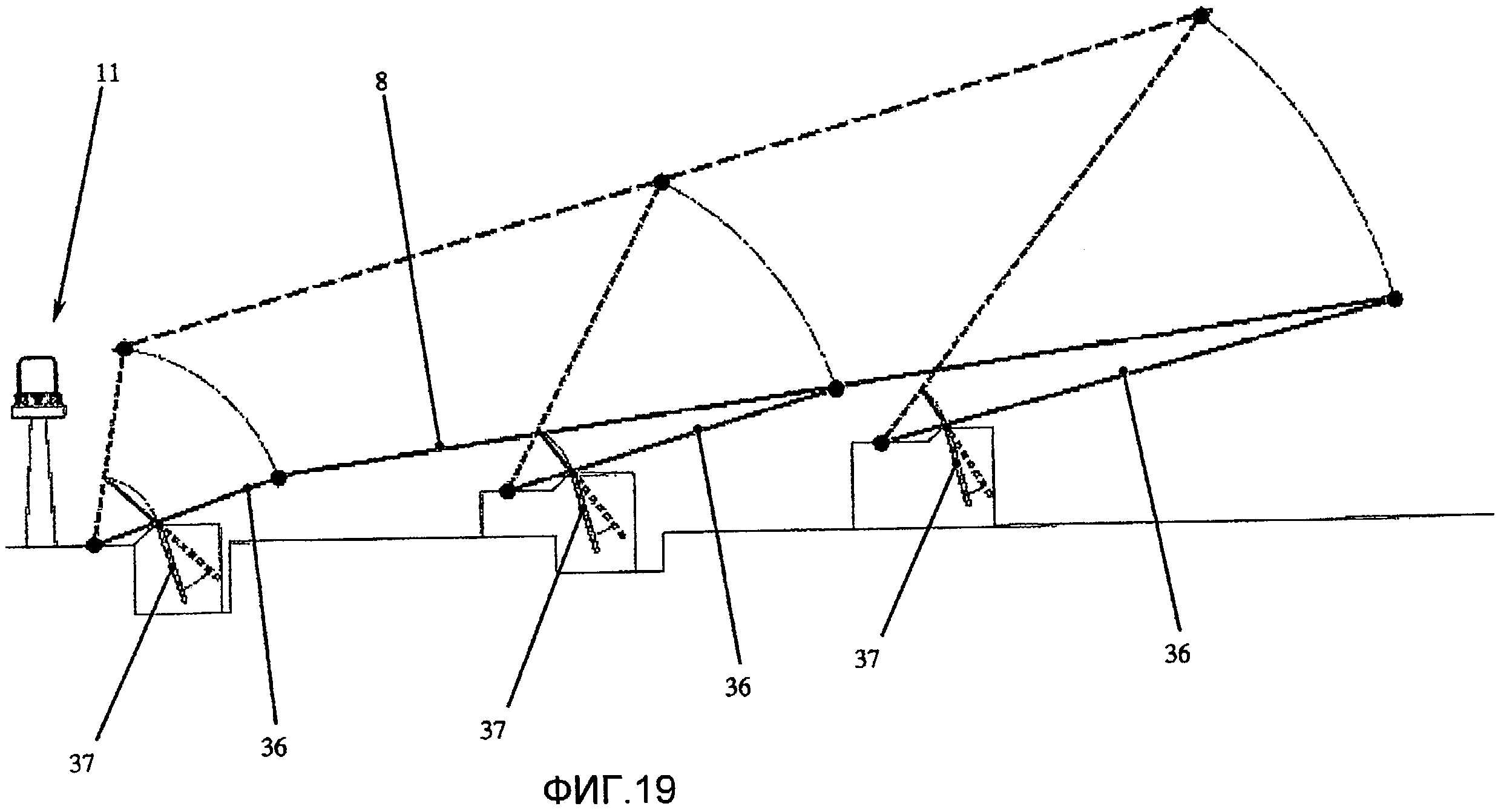
На Фиг.19 система, изображенная на Фиг.18, схематично показана в увеличенном масштабе;
Фиг.20 - схематичный вид спереди предпочтительного варианта одного из компонентов ветровой системы, показанной на Фиг.18, на двух этапах ее работы;
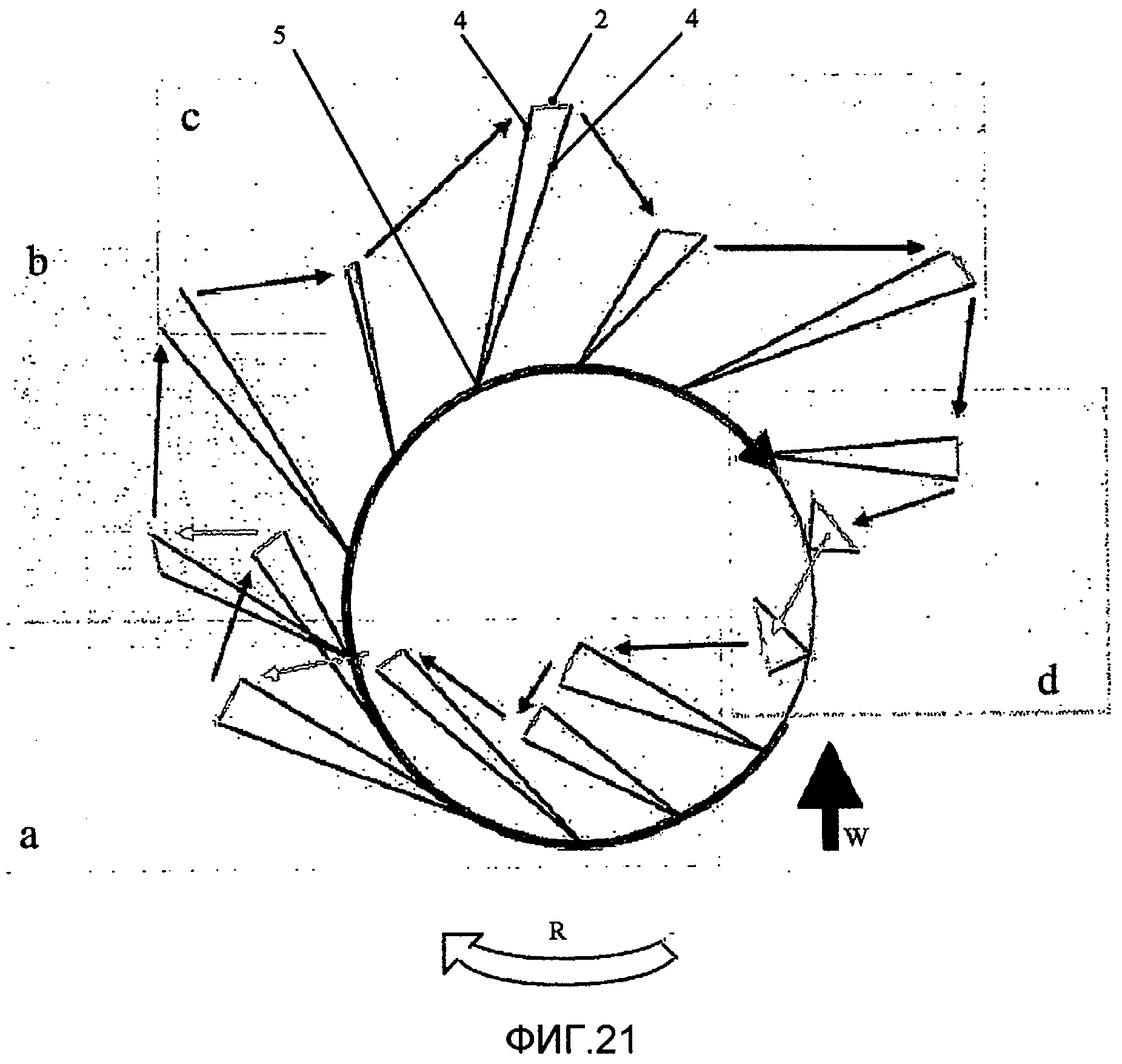
Фиг.21 - схематичный вид системы, соответствующей настоящему изобретению, на некоторых этапах ее работы;
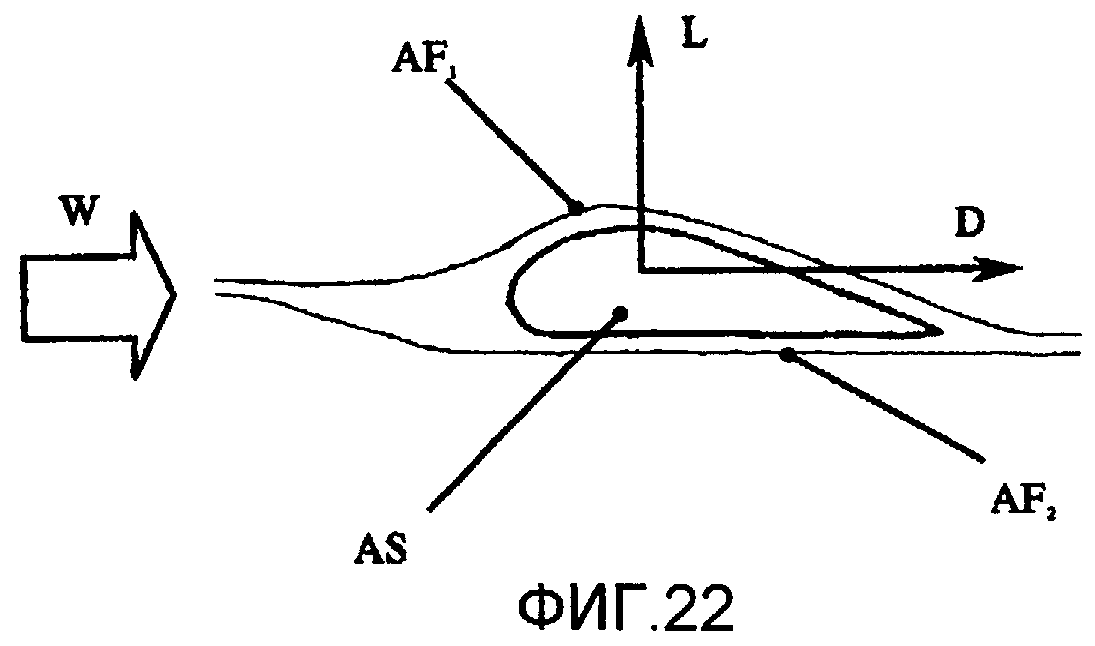
Фиг.22 - схематичный вид неподвижного аэродинамического профиля, погруженного в струю ветра, на котором показаны возникающие при этом силы; и
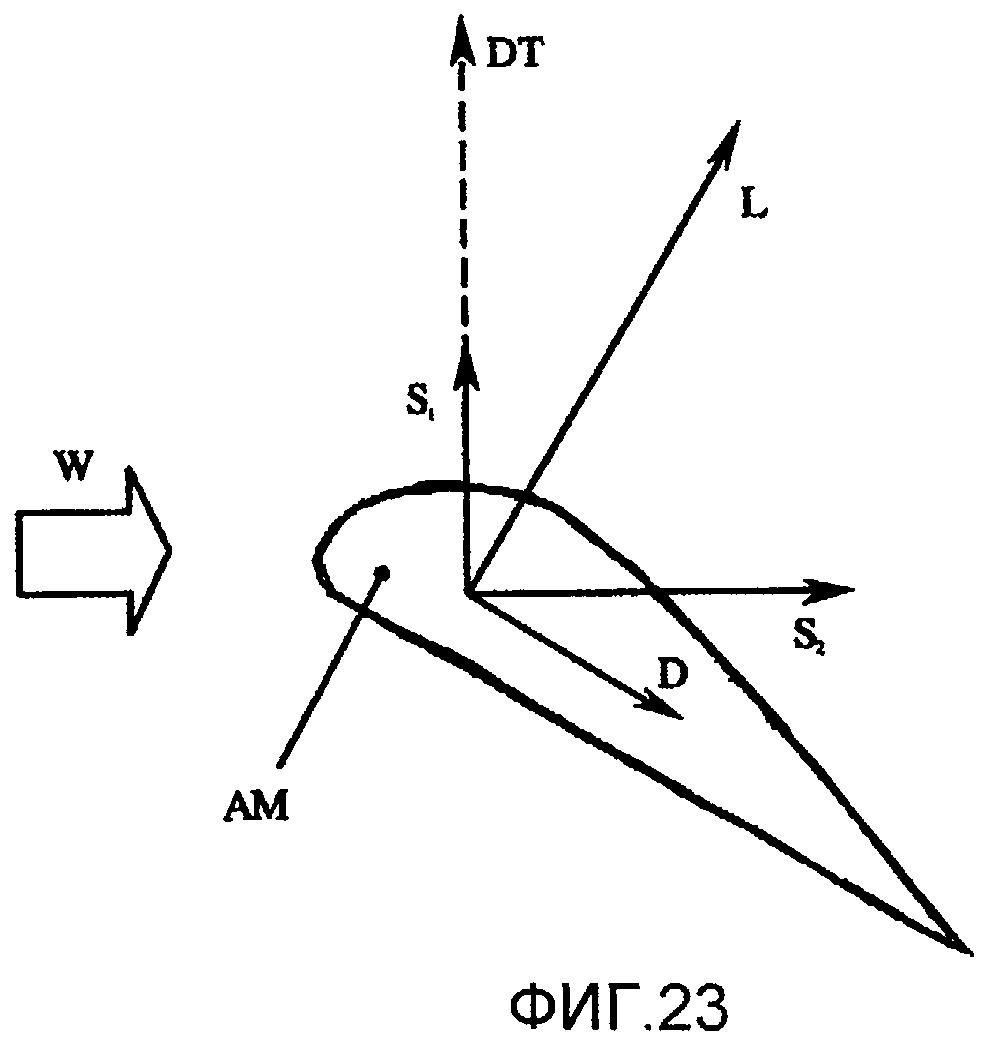
Фиг.23 - схематичный вид неподвижной аэродинамического профиля, свободно перемещающегося в направлении, перпендикулярном скорости ветра, на котором показаны возникающие при этом силы.
Как можно будет лучше увидеть из приведенного далее описания, в общем ветровая система, соответствующая настоящему изобретению, содержит, по меньшей мере, один модуль, выполненный с возможностью поступательного перемещения вдоль направляющей, в предпочтительном случае изготовленной таким образом, чтобы получился замкнутый контур кольцевого типа, под действием тяги, по меньшей мере, одного силового воздушного змея, погруженного в струю воздуха, с которым этот модуль соединен посредством, по меньшей мере, одного троса, причем такой модуль ведет себя как автономный генератор, преобразующий в электрический ток энергию ветра, захваченную на уровне тропосферы (которая простирается на расстояние до приблизительно 15 км от поверхности Земли). В частности, рядом с каждым модулем энергия из ветра извлекается при помощи цепочки воздушных змеев, соединенных последовательно, которую приводят в действие при помощи серволебедок, автономно управляемых интеллектуальной системой управления.
Если обратиться к чертежам, можно увидеть, что ветровая система 1 для преобразования энергии, соответствующая настоящему изобретению, содержит, по меньшей мере, один силовой профиль 2 в виде крыла (ниже также для краткости обозначаемый термином "воздушный змей"), погруженный, по меньшей мере, в одну струю W ветра и соединенный посредством, по меньшей мере, одного троса 4, по меньшей мере, с одним модулем 5 для генерации электричества, размещенным у земли и выполненным с возможностью перемещаться вдоль, по меньшей мере, одной направляющей 6 или 7. Воздушными змеями 2 управляют таким образом, чтобы они буксировали модули 5, с которыми они соединены, и позволяли преобразовать энергию ветра в электрическую энергию при помощи, по меньшей мере, одной системы генерации, содержащей, по меньшей мере, один описанный ниже генератор/электродвигатель 20 и/или 21 для каждого модуля 5. Тросы 4 выполнены с возможностью как передавать механическую энергию воздушным змеям 2 и получать механическую энергию от этих змеев для буксирования модулей 5, так и управлять траекторией полета самих воздушных змеев 2.
Ниже будет описан предпочтительный вариант ветровой системы 1, соответствующей настоящему изобретению. Для каждого компонента ветровой системы 1, кроме того, будет предусмотрен ряд альтернативных характеристик и функциональных возможностей, которые, не оказывая отрицательного влияния на достигаемую производительность, в значительной степени снижают стоимость и габариты всей системы 1 в целом. С этой целью можно использовать компьютеризованные многокритериальные методы принятия решения, которые помогут в определении оптимальных путей получения наилучшей архитектуры, а также методы управления, чьей задачей является оптимизация работы и КПД устройства.
Варианты исполнения относятся к непрерывному и дискретному типам. Непрерывные функции могут быть легко исследованы путем соотнесения преимуществ, которые могут быть получены путем изменения таких свойств, как стоимость, вес, стойкость, длины, углы, которые применены в решении. Дискретные варианты должны быть перечислены, и ниже со ссылкой на каждый компонент ветровой системы 1 описаны их основные характеристики.
Итак, ветровая система 1, предлагаемая настоящим изобретением, содержит воздушные змеи 2, изготовленные, например, сплетением волокон, обычно используемых при производстве парусов для определенных видов спорта, например таких, как серфинг и кайтинг. Благодаря последним исследованиям в области аэродинамики, на рынке предлагаются воздушные змеи 2, которые способны удовлетворить определенным потребностям с точки зрения контроля и управляемости. При соответствующем управлении воздушным змеем 2 можно модулировать передачу энергии от ветра - это является основополагающим принципом, так как воздушными змеями 2 необходимо управлять таким образом, чтобы тяга, создаваемая струями W ветра, являлась максимальной и, в то же время, не оказывала отрицательного влияния на движение модулей 5 по направляющим 6. Поэтому воздушными змеями необходимо управлять таким образом, чтобы создавать тягу, приводящую к поступательному перемещению модулей 5 по направляющим 6 всегда в одном и том же направлении. Такой результат достигается путем подходящего модулирования передачи энергии от ветра, как впоследствии можно будет увидеть в подробностях.
Когда воздушные змеи 2 при полете стремятся подняться со своей рабочей скоростью, аэродинамическое сопротивление тросов 4, соединенных с основанием системы 1, создает искажение, обусловленное наличием связи, которое изменяет угол атаки воздушных змеев 2, заставляя их принимать положение скольжения с увеличенной эффективностью. Путем регулирования угла атаки воздушных змеев 2 с целью заставить их слегка натянуться или колыхаться получают, по сути, систему обратной связи, которая задает действующую скорость воздушных змеев 2.
Мощность, которую воздушный змей 2 способен извлечь из ветра, представляет собой функцию как от аэродинамического качества воздушного змея 2, так и от его площади. В частности, эта мощность увеличивается пропорционально квадрату аэродинамического качества и линейно с увеличением площади. Таким образом, чтобы найти оптимальное решение, которое увеличивает до максимума мощность, которую воздушный змей 2 способен извлечь из ветра, можно влиять на оба эти фактора.
КПД воздушного змея зависит от его формы. Поэтому выбор оптимальной формы вносит решающий вклад в получение великолепных аэродинамических качеств. Однако такая оптимальная форма должна сохраняться также и тогда, когда в воздушном змее 2 возникают напряжения, обусловленные силами сопротивления и подъема (как более подробно рассмотрено ниже). С этой целью можно использовать полужесткие воздушные змеи 2. В отличие от абсолютно гибких воздушных змеев 2, полужесткие воздушные змеи 2 снабжены, например, чрезвычайно легкой рамой, благодаря которой эти змеи 2 могут принимать, например, форму, аналогичную форме жестких крыльев планера. Воздушные змеи 2 могут, например, конструктивно быть выполнены в виде ромбов, изготовленных из полимеров. Использование полужесткости обеспечивает значительное улучшение эксплуатационных характеристик не только благодаря лучшему аэродинамическому качеству, но также благодаря повышению легкости управления. В частности, жесткость может быть асимметричной в направлениях двух габаритов воздушного змея 2, чтобы гарантировать боковую гибкость, которую можно использовать для возврата воздушного змея 2 в исходное положение в соответствующей системе 8 возврата в исходное положение, которая описана ниже.
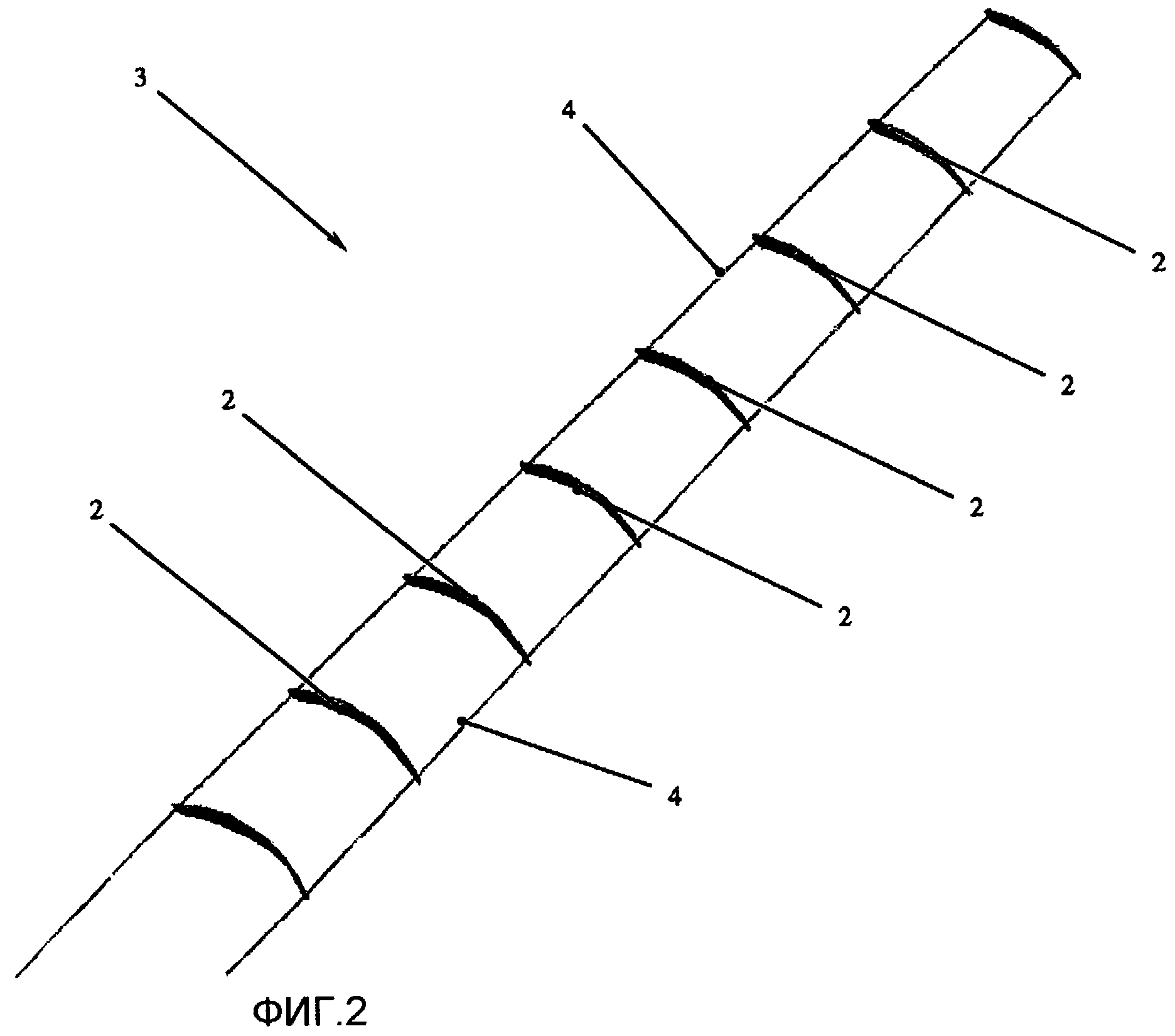
Чтобы увеличить до максимума мощность, которую ветровая система 1, предлагаемая настоящим изобретением, должна быть способна извлечь из ветра W, предпочтительно для каждого модуля 5 использовать множество воздушных змеев 2, соединенных между собой последовательно с образованием цепочки 3 из воздушных змеев 2, чтобы суммировать тянущее усилие на тросах 4. При этом увеличивается площадь ветрового фронта W, которую способен перехватить каждый модуль 5. Это приводит к увеличению эффекта буксирования, который приводит к поступательному перемещению модуля 5, и, следовательно, к увеличению электрической энергии, которая может быть сгенерирована в каждом рабочем цикле. Каждая цепочка 3 воздушных змеев 2 соединена с модулем 5 посредством единой системы тросов 4, следовательно, принцип работы ветровой системы 1 не зависит от числа воздушных змеев 2, соединенных последовательно в цепочку 3. Такая многослойная конфигурация не только увеличивает перехватываемую площадь ветрового фронта W, но при ее изготовлении в виде целостного объекта или подходящим образом собранного объекта также дает шанс увеличить аэродинамическое качество. Тросы 4 фактически могут быть встроены в "стенки" воздушных змеев 2 (не показано), либо сами стенки воздушных змеев могут представлять собой соединяющий элемент между воздушными змеями 2 (не показано), что, в свою очередь, дает сечение в виде аэродинамического профиля и сохраняет геометрическую стабильность узла. Это позволяет исключить тросы 4 (и, таким образом, создаваемое ими сопротивление) в зоне системы с максимальными скоростями. Чтобы достичь этого результата, воздушные змеи 2 можно выполнить в форме дуги, при которой упомянутые стенки проходят до соединения с другими воздушными змеями 2, или в формах, которые напоминают плоские крылья с одной или двумя соединительными стенками.
Ниже для полноты будет рассмотрен случай, когда ветровая система 1 имеет цепочку 3 воздушных змеев 2 для каждого модуля 5. Число наложенных друг на друга воздушных змеев 2 может быть увеличено произвольным образом. Более того, при сохранении постоянной общей площади за счет увеличения числа воздушных змеев 2, образующих одну цепочку 3, можно уменьшить размер воздушного змея. Это облегчает маневры возврата воздушных змеев и их выталкивания, как впоследствии можно будет увидеть в подробностях. В одном из вариантов ветровой системы 1, соответствующей настоящему изобретению, предлагается, чтобы воздушные змеи 2, относящиеся к одной и той же цепочке 3, не все имели одинаковые размеры. Воздушные змеи 2 в верхней части цепочки 3 имеют размерные соотношения и связанные с ними аэродинамические качества, отличающиеся по сравнению с воздушными змеями 2 в нижней части. Таким образом, воздушные змеи 2, ближайшие к модулю 5, характеризуются большей площадью, и размеры воздушных змеев уменьшаются по мере приближения к верхнему концу цепочки 3. Эту конфигурацию применяют в связи с тем, что при увеличении расстояния от воздушного змея 2 до модуля 5, с которым он связан посредством троса 4, увеличивается его скорость во время полета. Таким образом, в направлении от нижнего конца к верхнему концу цепочки 3 воздушных змеев можно компенсировать увеличение скорости полета воздушных змеев 2 путем постепенного уменьшения поверхности. При этом мощность, извлекаемая из ветра W, одинакова для каждого змея 2 из одной и той же цепочки 3.
Ветровая система 1, соответствующая настоящему изобретению, содержит тяговые тросы 4, выполненные с возможностью передавать силы от воздушных змеев 2 и к воздушным змеям 2 и используемые для буксирования модулей 5 с целью преобразования энергии и для контроля траектории полета самих воздушных змеев 2. Тяговые тросы 4 представляют собой элемент, который должен иметь точный размер, так как возможное превышение размера неизбежно вызовет увеличение их аэродинамического сопротивления. В одном из вариантов ветровой системы 1, соответствующей настоящему изобретению, предлагается, чтобы тросы 4 имели переменное сечение (не показано). В частности, секция тросов, находящаяся рядом с модулями 5 ветровой системы 1 (а именно, секции тросов 4, подвергающихся непрерывным силовым маневрам и находящихся в контакте с системами, предназначенными для выполнения таких маневров и описанными ниже) имеет больший размер по сравнению с секцией тросов 4, находящейся рядом с цепочками 3 воздушных змеев 2. Это позволяет получить большее сопротивление износу. Изменение сечения может быть непрерывным или поэтапным на величину смещения. Чтобы дополнительно уменьшить сопротивление секций тросов 4, на которые влияют большие по размеру по скорости (а именно, участки троса 4 рядом с цепочками 3 воздушных змеев 2), сечение тросов 4 на этих участках можно, например, моделировать с учетом аэродинамики для воздушного змея, который осуществляет легкий асимметричный подъем, чтобы избежать явлений турбулентности и колебаний. Такой результат может быть достигнут, например, путем покрытия тросов 4 экструдированной оболочкой с сечением в виде звезды (не показано), в этом случае выступы оболочки в виде ребер звезды отклоняются ветром W до тех пор, пока не реализована аппроксимация воздушного змея. В случае возникновения колебаний выступы создают взаимное трение с целью поглотить кинетическую энергию, в результате чего колебания ослабляются.
Далее, ветровая система 1, соответствующая настоящему изобретению, содержит, по меньшей мере, один модуль 5, который перемещается, по меньшей мере, по одной направляющей 6, например, при помощи колес 16, 17 или за счет магнитной левитации и который выполнен с возможностью управлять воздушными змеями 2 и преобразовывать энергию струи ветра в электрическую энергию. Модули 5 размещены у земли, и каждый модуль 5 соединен с цепочкой 3 воздушных змеев 2 посредством, по меньшей мере, одного троса 4, выполненного с возможностью передавать силы от воздушных змеев 2 и к воздушным змеям 2 и используемого для буксирования модуля 5 с целью преобразования энергии и для контроля траектории полета самих воздушных змеев 2.
Если обратиться к чертежам, можно увидеть, что каждый модуль 5 ветровой системы 1 содержит, по меньшей мере, одну тележку 11, посредством которой модуль 5 поступательно перемещается, по меньшей мере, по одной направляющей 6. Форму тележек 11 модулей 5 ветровой системы 1 в предпочтительном случае моделируют с учетом аэродинамики, чтобы снизить до минимума сопротивление воздуха при работе ветровой системы 1.
Каждый модуль 5 снабжен всеми необходимыми компонентами для автоматического управления воздушными змеями 2 и для генерации электрической энергии. Преобразование механической энергии в электрическую энергию происходит, например, при помощи генераторов 20 и/или 21, непосредственно соединенных с колесами 16 и 18, к вращению которых приводит буксирование модулей 5 по направляющей 6, входящей в состав системы генерации электричества. В качестве альтернативы приведения в действие генераторов 20 и/или 21 при помощи колес 16, преобразование механической энергии в электрическую энергию может происходить за счет реверсивного использования линейных магнитных двигателей (не показаны). Каждый модуль 5, таким образом, представляет собой генератор, способный поставлять мощность независимо от других модулей 5.
Ветровая система 1, предлагаемая настоящим изобретением, далее содержит интеллектуальную систему управления, которая используется для работы с каждым модулем 5 и посредством которой автоматически контролируют полет воздушных змеев 2, а также систему питания, работающую совместно с этой интеллектуальной системой управления для контроля над накоплением и поставкой электрической энергии, созданной генераторами 20 и/или 21 во время поступательного перемещения модуля 5 вдоль направляющей 6 под действием буксирования воздушными змеями 2, с которыми он соединен посредством тросов 4.
Для каждого модуля 5 интеллектуальная система управления управляет цепочкой 3 воздушных змеев 2, используя эффект буксирования, чтобы заставить модуль 5 перемещаться по замкнутому контуру. В частности, интеллектуальная система управления взаимодействует с набором датчиков, имеющих автономное питание, которые размещены на воздушных змеях 2 и посылают информацию, предпочтительно в беспроводном режиме, в наземные компоненты этой системы. Интеллектуальная система управления суммирует эту информацию с другой информацией, поступающей от набора наземных датчиков (например, величина нагрузки на тросы 4, полученная как показания пары двигателей 28, которые ниже рассмотрены более подробно) и выполняет обработку, чтобы автоматически управлять воздушными змеями 2 при работе ветровой системы 1.
Что касается управления воздушными змеями 2, ветровая система 1, соответствующая настоящему изобретению, обеспечивает два режима.
Первый режим состоит в использовании силовых тросов в качестве управляющих тросов. Каждая цепочка 3 воздушных змеев 2, таким образом, соединена с соответствующим модулем 5 посредством пары тросов 4. Эти тросы 4, во-первых, позволяют буксировать модуль 5 (и, таким образом, генерировать электрическую энергию) благодаря передаче механической энергии, извлеченной из струй W ветра. Те же тросы 4, кроме того, разматывают и повторно наматывают с использованием подходящих лебедок 24 и 25, чтобы управлять цепочкой 3 воздушных змеев 2.
Второй режим управления состоит в использовании интерцепторов (не показаны), размещенных на борту воздушных змеев 2. Посредством этих интерцепторов можно создавать турбулентность, увеличивающую градиенты давления, при помощи которых управляют воздушными змеями 2. Упомянутые выше интерцепторы могут приводиться в действие, например, при помощи пьезоэлектрических систем, полимеров с эффектом запоминания формы и/или волокон из металлических сплавов с эффектом запоминания формы, изменением геометрии которых оперативно управляют. Такая система имеет автономный источник питания или питание к ней может подводиться через кабели (не показаны), которые идут от модуля 5 к воздушным змеям 2. Сигналы управления для приведения в действие интерцепторов в предпочтительном случае посылаются в беспроводном режиме интеллектуальной системой управления. За счет использования интерцепторов можно управлять воздушными змеями 2 без необходимости использования тросов 4. То есть, в этом случае система, следящая за маневрированием воздушных змеев 2, находится на борту этих змеев, и цепочка 3 воздушных змеев 2 может быть соединена с соответствующим модулем 5 при помощи одного троса 4, используемого исключительно для передачи нагрузки и позволяющего буксировать модуль 5.
Управление воздушными змеями 2 может также происходить за счет применения обоих описанных выше режимов.
Подводя итог, можно сказать, что существуют разные методы управления воздушными змеями 2 и получения от них тяги в зависимости от наличия одного или более управляющих тросов 4. Один трос 4 перекладывает выполнение маневров на исполнительные системы, находящиеся на борту воздушных змеев 2, ограничиваясь передачей тяги; в качестве альтернативы, наличие двух тросов 4 добавляет к функции обеспечения тяги функцию управления. Увеличивая число тросов 4, далее можно добавить такие функции управления, как коррекция угла атаки воздушного змея 2, функции безопасности и функции быстрого обезветривания. Таким образом, в случае управления при помощи тросов 4 (с поддержкой со стороны интерцепторов или без нее), каждая цепочка 3 воздушных змеев 2 должна быть соединена с соответствующим модулем 5 посредством пары тросов 4. В случае управления исключительно посредством интерцепторов в качестве альтернативы имеется один трос 4, который работает как соединительный элемент между цепочкой 3 воздушных змеев 2 и модулем 5. В этом случае, следовательно, число компонентов модулей 5, которые управляют тросами 4 или хранят их, уменьшается, что в значительной степени упрощает конструкцию ветровой системы 1.
Ниже будет рассмотрен простой случай, в котором управление воздушными змеями 2 в ветровой системе 1, соответствующей настоящему изобретению, происходит при помощи пары тросов 4. Как бы то ни было, для каждого компонента ветровой системы 1, который подробно проанализирован ниже, будут указаны упрощения, которые можно внести в случае использования одного троса 4 для буксирования каждого модуля 5.
Даже если ограничение числа тросов 4 является выгодным с точки зрения аэродинамики, решение с двумя тросами 4, в дополнение к простому управлению и тяге, также обеспечивает возможность выполнения маневров в аварийных ситуациях. Должное управление, как правило, обеспечивается при помощи ограниченного дифференцированного изменения длины соответствующих тросов 4, но если дифференцированное изменение длины соответствующих тросов 4 превышает интервал между крыльями воздушных змеев 2, возникает ситуация, при которой не происходит подъема, называемого ниже "боковым скольжением". В этой ситуации, если возникает необходимость в быстром возврате, можно быстро повторно намотать тросы 4, не затрачивая энергии. Однако во время этой быстрой потери высоты из-за эффекта бокового скольжения существует риск кручения воздушного змея 2 с существенной потерей контроля. Чтобы предотвратить такую потерю контроля, можно снабдить воздушные змеи 2 аэродинамическими устройствами и средствами, которые позволяют легко остановить быструю потерю высоты после достижения определенного ее уровня и корректно восстановить нормальное и эффективное состояние полета. На этапах бокового скольжения боковая кромка воздушного змея 2 становится кромкой атаки, и в ней устанавливают как инструменты отслеживания положения в трехмерном пространстве, так и исполнительную и стабилизирующую систему для маневра бокового скольжения (не показано). Упомянутая исполнительная и стабилизирующая система характеризуется, например, наличием направленных боковых выступов и интерцепторов, управляемых интеллектуальной системой управления.
В нормальных условиях полета направленные боковые выступы расположены в поперечном направлении относительно давления ветра и убраны за счет изгиба, чтобы не изменять КПД воздушного змея. При боковом скольжении направленные боковые выступы поднимаются под действием потока, который возникает в правильном направлении. Направленные боковые выступы, таким образом, действуют сообща при повторной балансировке входа воздушного змея 2, когда он ненадлежащим образом используется в боковом скольжении, что позволяет в пассивном режиме улучшить устойчивость при маневре. Дополнительное средство стабилизации оперативно обеспечивается за счет подходящего размещения интерцептора/интерцепторов (уже упомянутых ранее), которые приводятся в действие с изменением геометрии при помощи логики, которая использует напрямую, или через наземное управление, информацию от датчиков слежения за полетом, чтобы уравновесить тенденцию к кручению.
Исполнительная и стабилизирующая система маневра бокового скольжения позволяет выполнить немедленную коррекцию/уменьшение высоты воздушного змея 2 при потере высоты и, после того как достигнута требуемая высота или удлинение тросов 4, восстановить подъем путем возврата к дифференцированной длине тросов, совместимой с нормальным полетом.
В ветровой системе 1, соответствующей настоящему изобретению, применение исполнительной и стабилизирующей системы маневра бокового скольжения состоит, главным образом, в быстром и контролируемом освобождении зоны в воздушном пространстве.
Далее, ветровая система 1, соответствующая настоящему изобретению, содержит, по меньшей мере, одну систему 8 возврата в исходное положение для воздушных змеев 2: в следующем далее описании ветровая система 1 будет описана в соответствии с двумя предпочтительными вариантами, приведенными в качестве примеров, не ограничивающих объем настоящего изобретения, такие варианты различаются, главным образом, способами обеспечения опоры для систем 8 возврата в исходное положение воздушных змеев 2.
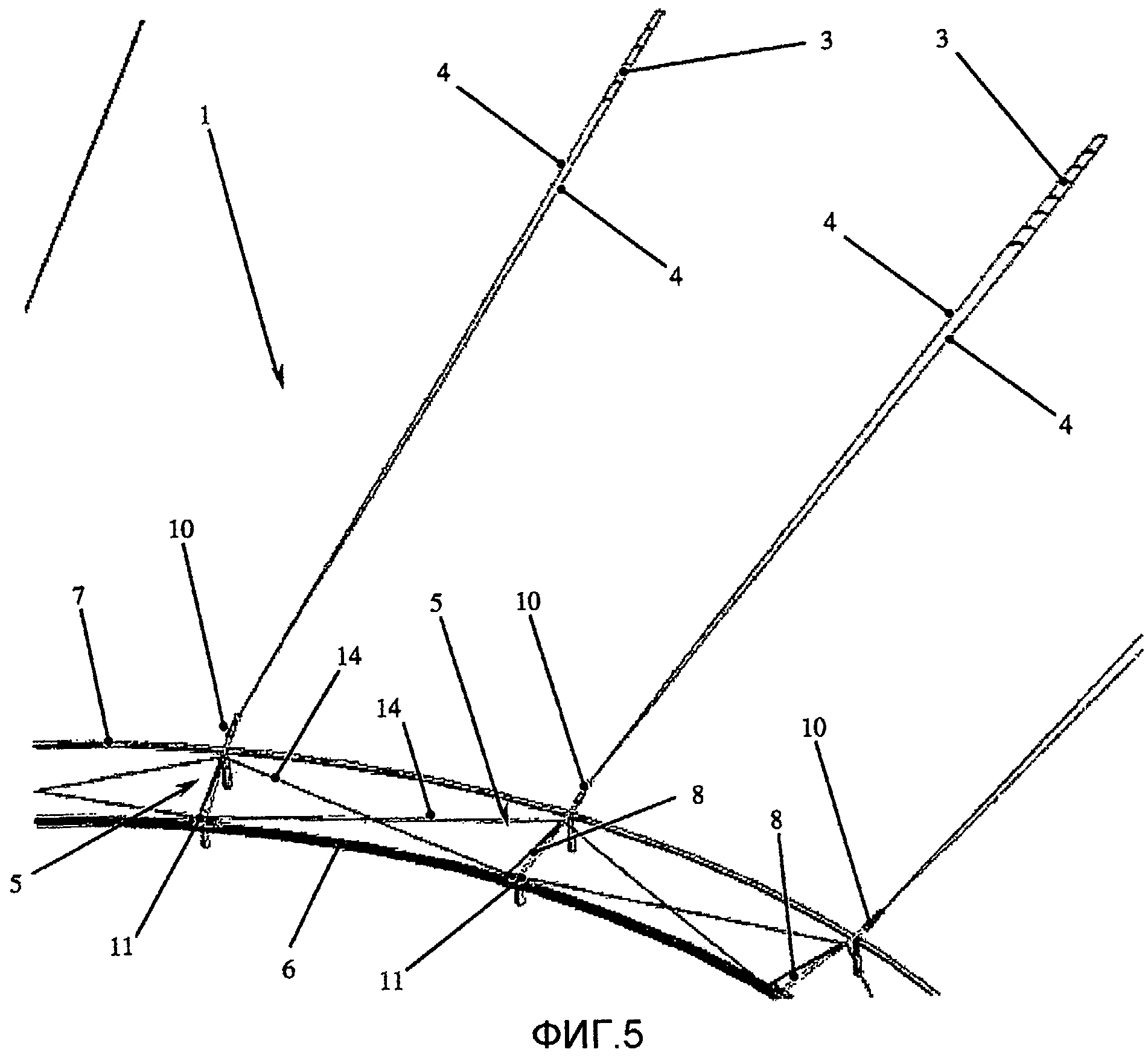
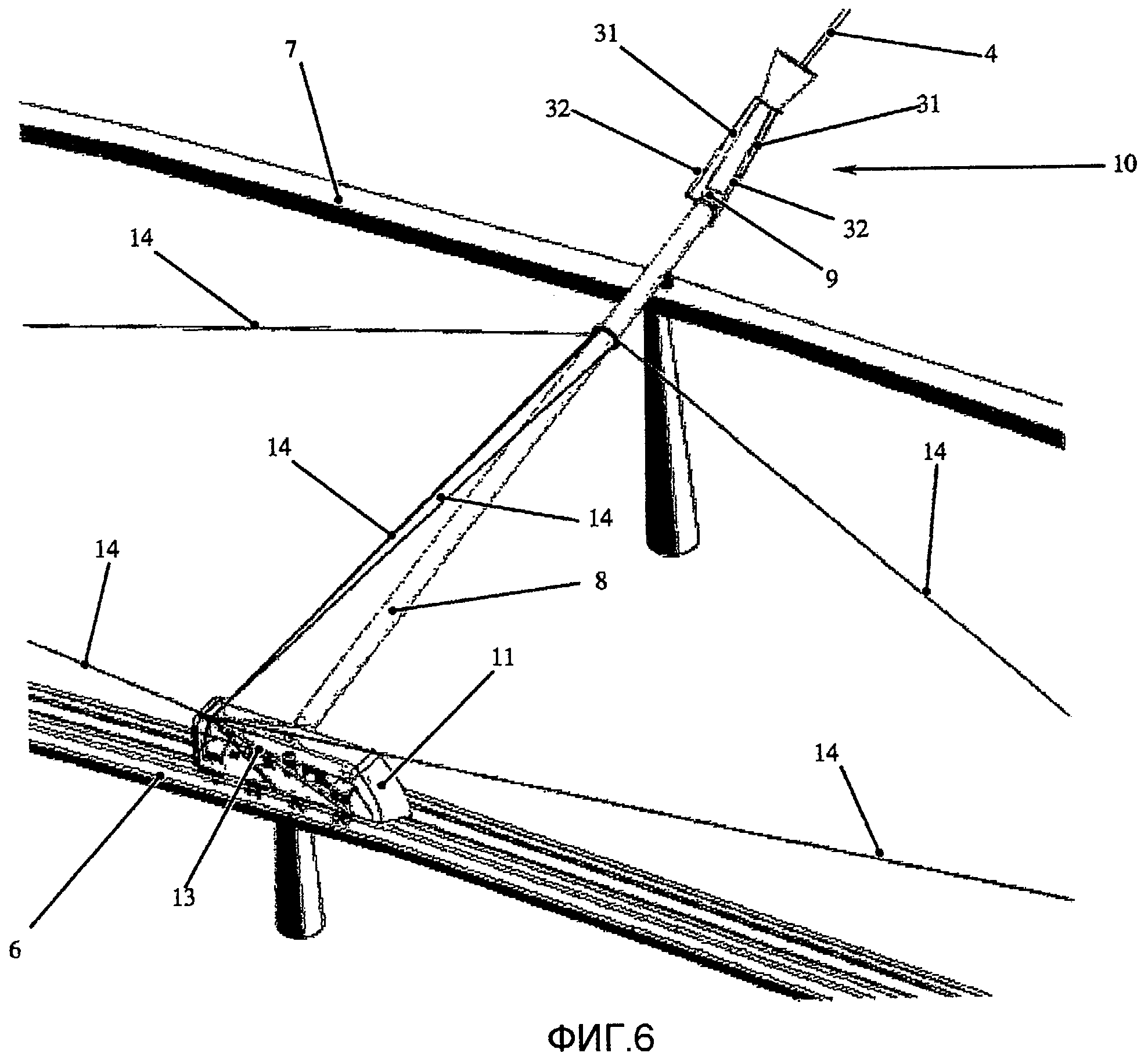
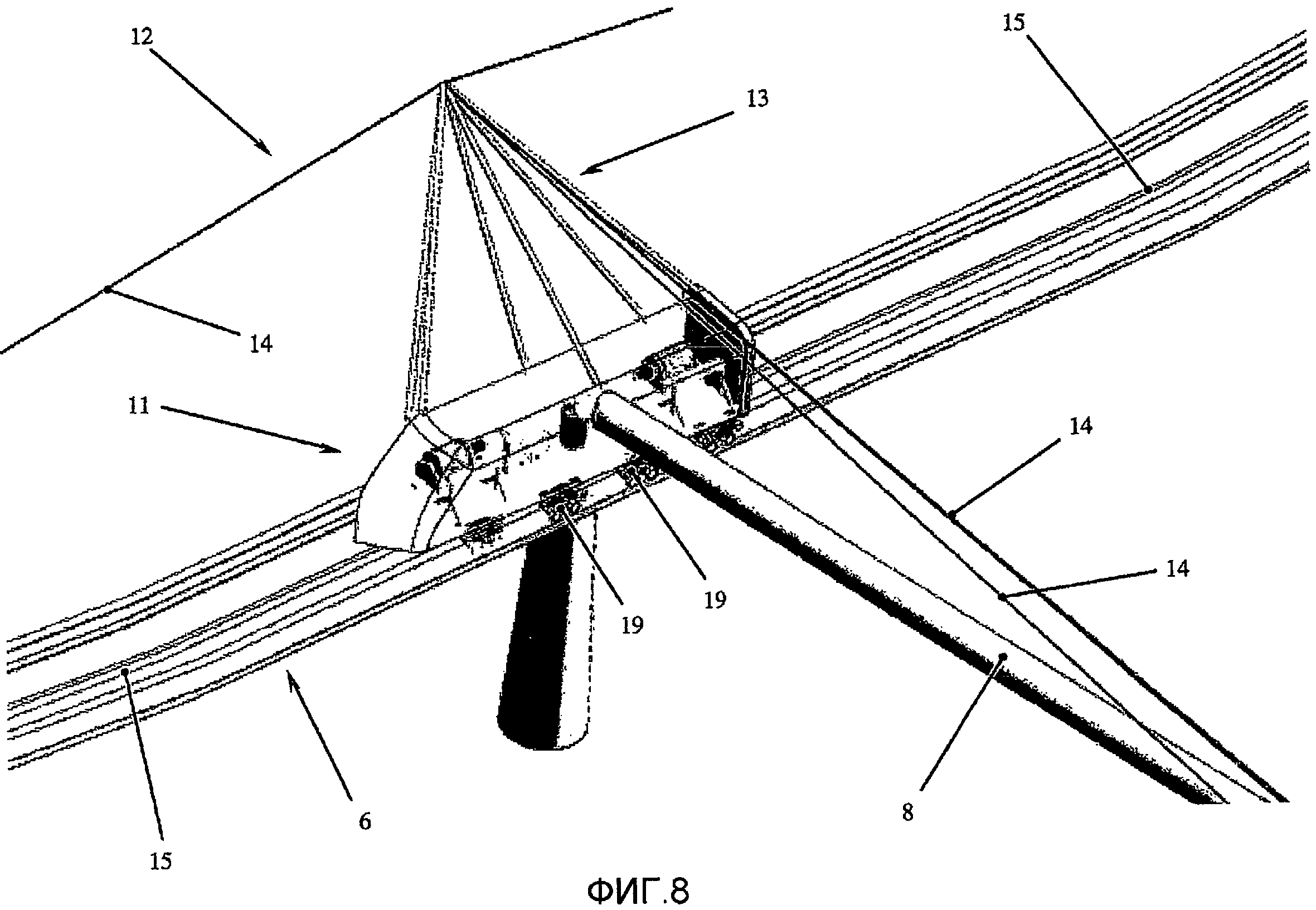
Согласно первому варианту, ветровая система 1, предлагаемая настоящим изобретением, содержит, по меньшей мере, один модуль 5, содержащий одну тележку 11, рядом с которой размещены как преобразующие энергию генераторы 20 и/или 21, так и компоненты системы, предназначенные для управления воздушными змеями 2. Если обратиться к Фиг.5 - Фиг.9, можно увидеть, что системы 8 возврата в исходное положение связаны с модулями 5 ветровой системы 1 в месте, расположенном рядом с концом. Вес систем 8 возврата в исходное положение несет находящаяся в натянутом состоянии гибкая конструкция 12, состоящая из растяжек 14, один конец которых связан с системами 8 возврата в исходное положение, а другой конец связан с вертикальной конструкцией 13, например, фермой, которой снабжен каждый модуль 5. Находящаяся в натянутом состоянии гибкая конструкция 12 далее соединяет каждый модуль 5 ветровой системы 1, по меньшей мере, с двумя, возможно, соседними модулями 5. При соединении разных модулей 5 между собой, если в модуле 5 эффект буксирования недостаточен, такой модуль 5 будет буксироваться другими модулями 5 ветровой системы 1, в которых имеется эффект буксирования. Это позволяет избежать (или, возможно, задержать) приведение в действие генераторов 20 и/или 21, используемых для производства электричества, в качестве двигателей, чтобы сделать возможным продвижение модуля 5, как описано далее более подробно.
Согласно этому варианту, системы 8 возврата в исходное положение также могут быть снабжены, например, амортизированными колесами 17, посредством которых они опираются на вспомогательные направляющие 7. При этом вес систем 8 возврата в исходное положение не несется исключительно системой из растяжек 14, и системы 8 частично опираются на землю.
В варианте ветровой системы 1 с использованием гибких конструкций, находящихся в натянутом состоянии, в котором точным образом объединены элементы, работающие на сжатие, с системами тяговых тросов, происходит разделение и ослабление сил, а также перенос воздействия каждой цепочки 3 воздушных змеев на всю ветровую систему 1 в целом, что позволяет обеспечить взаимодействие между отельным модулями 5 и уменьшить необходимость в превышении номинальных размеров.
Форма, которую в целом может принять находящаяся в натянутом состоянии гибкая конструкция 12, является предметом тщательного анализа путем моделирования, но по типу эта форма относится к совокупности треугольных секций, размещенных с получением симметричной конструкции в виде цилиндра, в идеале похожей на соломенную шляпу или чашу (не показано).
В состав напряжений, которые должна выдерживать находящаяся в натянутом состоянии гибкая конструкция 12, входит компонент тяги воздушных змеев 2, имеющий направление по касательной, который, по сути, позволяет производить энергию. Однако, как указано ранее, находящаяся в натянутом состоянии гибкая конструкция 12 должна, самое главное, также нести вес систем 8 возврата в исходное положение, прежде всего являющихся особенно тяжелым компонентом, если вспомогательные направляющие 7 отсутствуют, и в ситуации остановки ветровой системы 1 (когда опорой системам 8 не служит или почти не служит вертикальный компонент тянущего усилия воздушных змеев 2). В этом состоянии весь вес системы 8 статически воспринимается находящейся в натянутом состоянии гибкой конструкцией 12, геометрия которой содержит кольцо (не показано), повторяющее форму замкнутого контура ветровой системы 1. Форма такого кольца может следовать за формой чередования модулей 5.
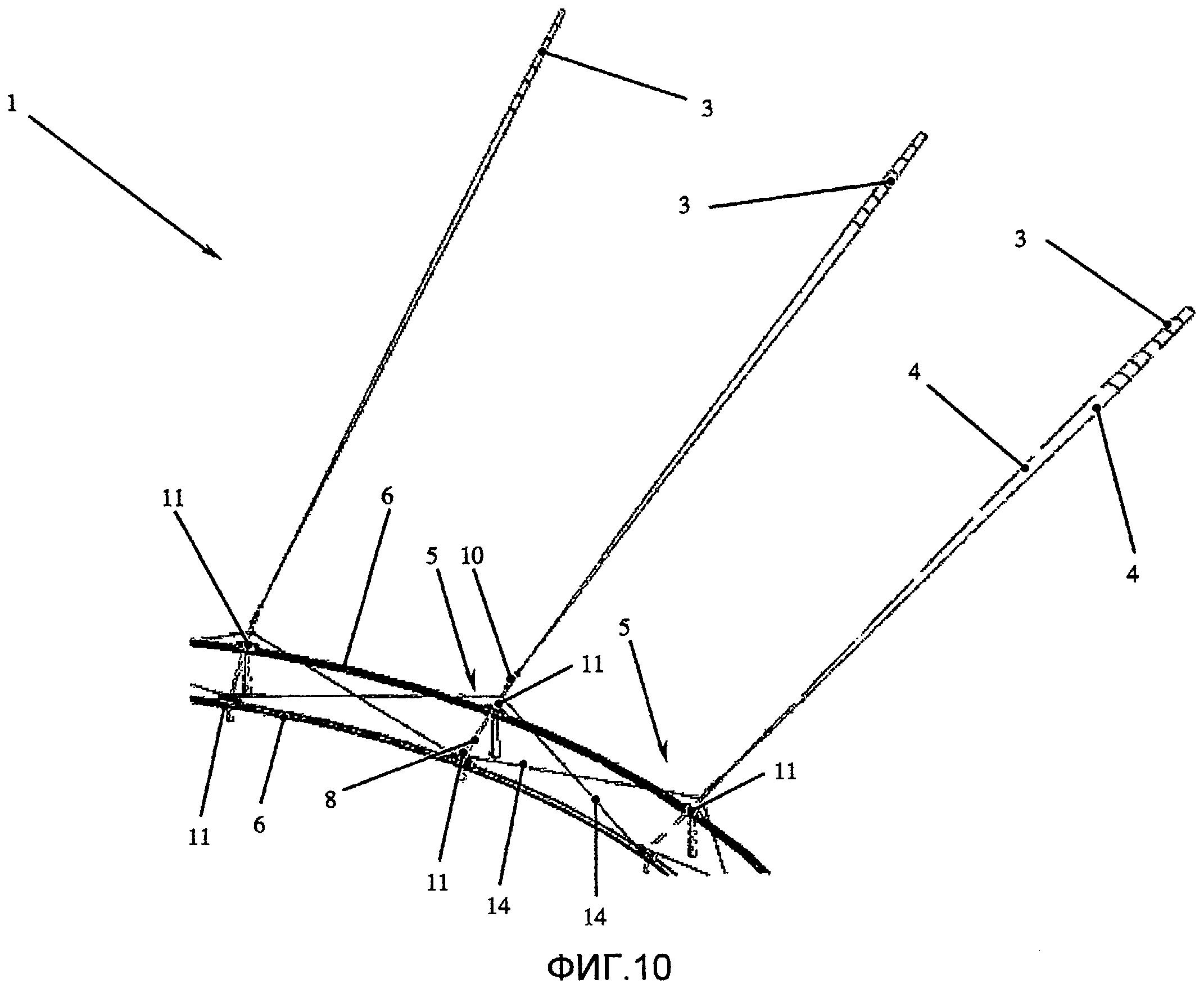
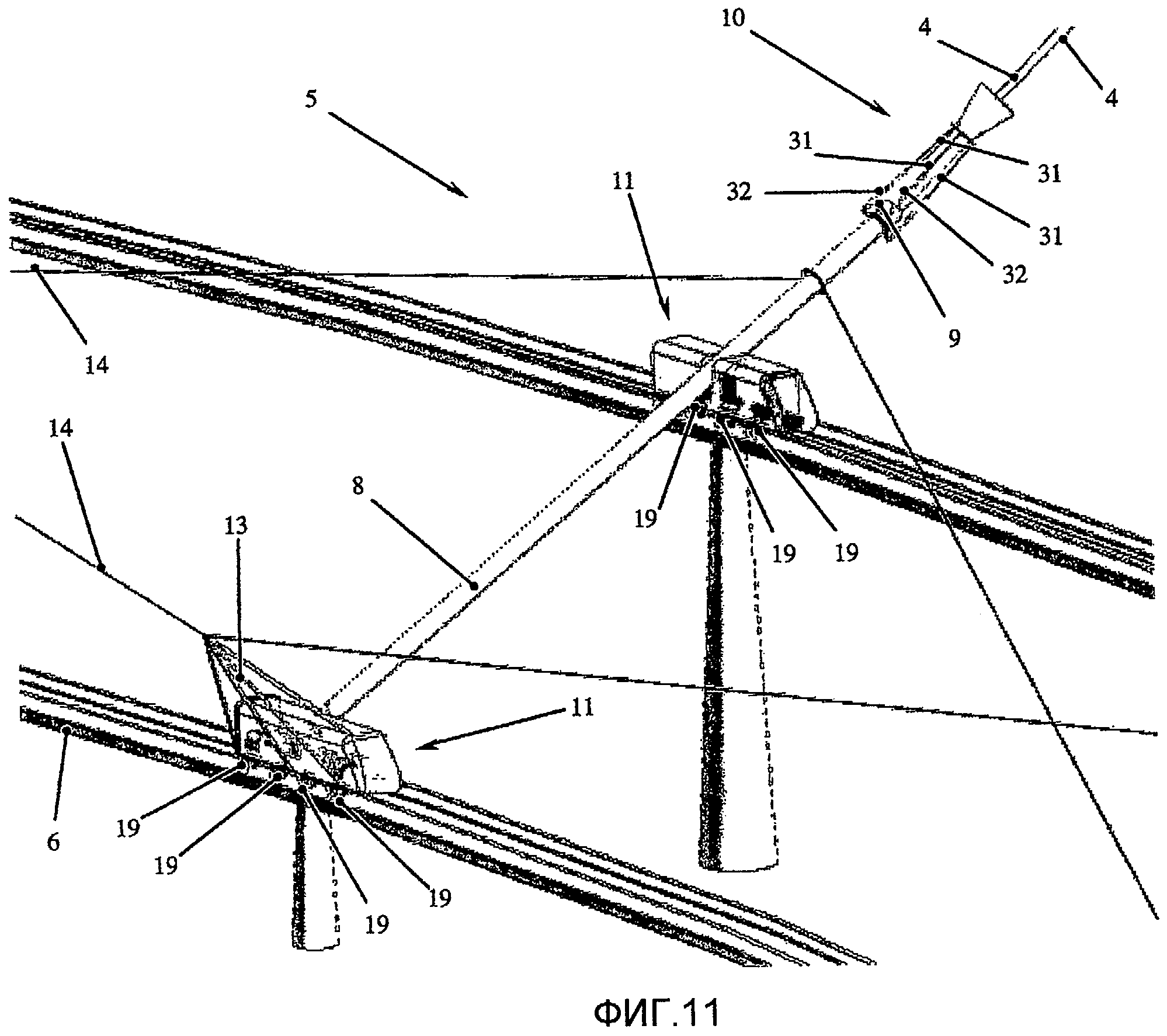
Второй вариант ветровой системы 1, соответствующей настоящему изобретению, содержит, по меньшей мере, один модуль 5, снабженный, по меньшей мере, двумя тележками 11, которые движутся по параллельным направляющим 6, размещенным, например, на различных уровнях по высоте. Если обратиться к Фиг.10 - Фиг.14, можно увидеть, что согласно этому варианту, для каждого модуля 5 система 8 возврата в исходное положение связана с двумя тележками 11. Тележка 11 размещена рядом с тем концом системы 8 возврата в исходное положение, из которого тросы 4 выходят в направлении к воздушным змеям 2, и снабжена генераторами 20 и/или 21, при помощи которых происходит преобразование энергии. Другая тележка 11 размещена рядом с другим концом системы 8 возврата в исходное положение и снабжена другими компонентами, на которые возложены задачи управления воздушными змеями 2 и хранения тросов 4. Как указано также и для предыдущего варианта, системы 8 возврата в исходное положение также могут быть снабжены, например, амортизированными колесами 17, посредством которых они опираются на вспомогательные промежуточные направляющие 7, которые служат дополнительной опорой системе 8 возврата в исходное положение (не показано). Можно снабдить обе тележки 11 модулем 5 генераторов 20 и/или 21 для производства электричества. Ниже будет рассмотрен случай, в котором для каждого модуля 5 генераторы 20 и/или 21 размещены на одной тележке 11 в соответствии с тем, как указано ранее. Размещение направляющих 6, по которым движутся тележки 11, на различных уровнях по высоте позволяет наклонить системы 8 возврата в исходное положение относительно земли и в направлении цепочки 3 воздушных змеев 2, чтобы обеспечить меньшее сопротивление тросам 4 при работе ветровой системы 1. Кроме того, в этом варианте предлагается, чтобы каждый модуль 5 ветровой системы 1 был соединен, по меньшей мере, с двумя соседними модулями при помощи находящейся в натянутом состоянии гибкой конструкции 12. При соединении разных модулей 5 между собой, если для модуля 5 эффект буксирования недостаточен, такой модуль 5 будет буксироваться другими модулями 5 ветровой системы 1, для которых имеется эффект буксирования.
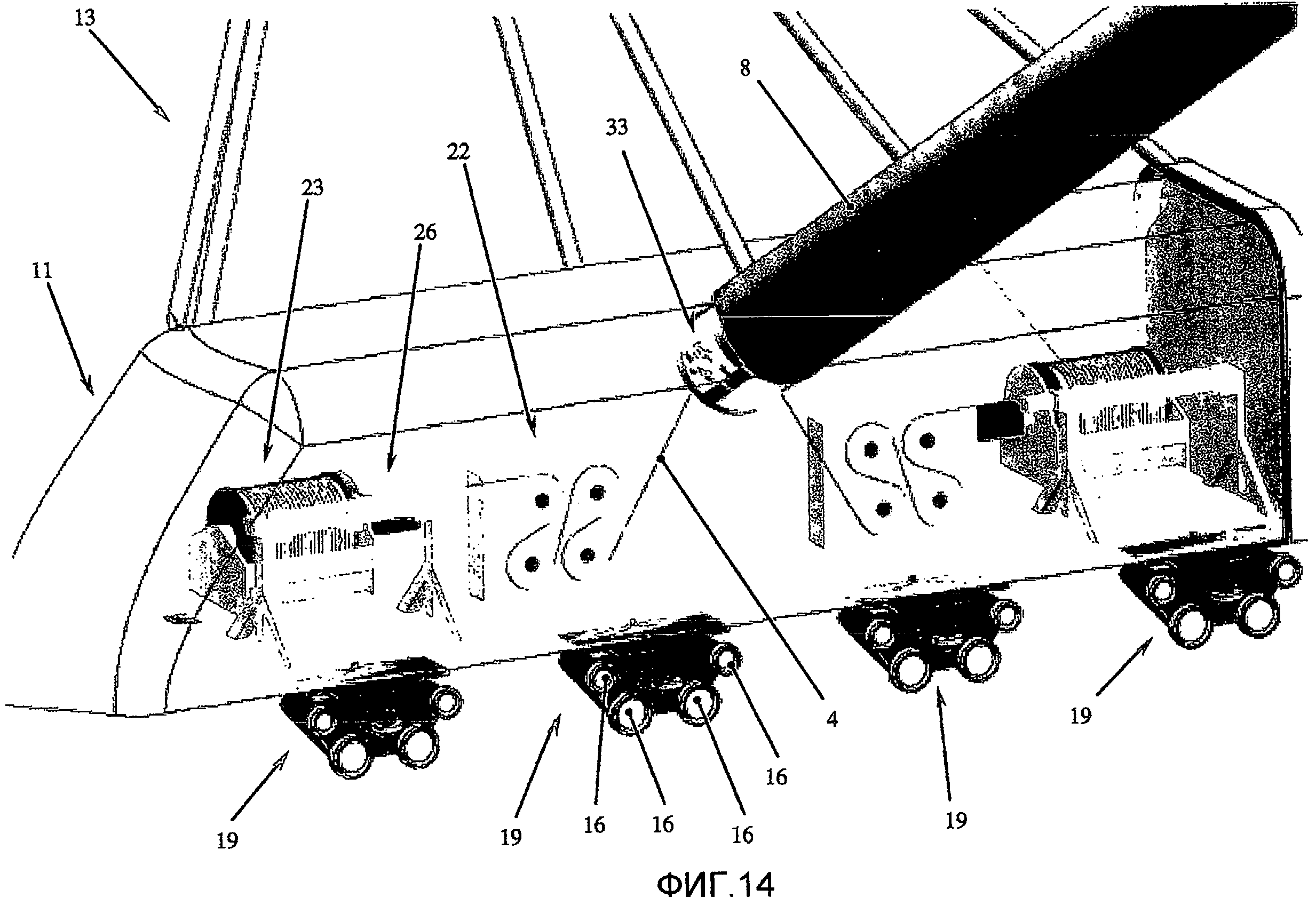
В обоих описанных выше вариантах система 8 возврата в исходное положение воздушных змеев 2 составляет единое целое с системой возврата в исходное положение и выброса этих змеев (не показано). Пара тросов 4, соединенных с цепочкой 3 воздушных змеев 2, пересекает систему 8 возврата в исходное положение и проходит до системы передачи, снабженной, по меньшей мере, одной системой поглощения пиковых значений силы (не показана) для тросов 4, и, по меньшей мере, одной системой создания трения (не показана) в тросах 4, которая направляет тросы 4 к системе 22 наматывания/разматывания, содержащей, по меньшей мере, одну пару из четырех лебедок 24, предназначенных для управления цепочками 3 воздушных змеев 2, и системе 23 хранения тросов 4, состоящей, по меньшей мере, из одной пары лебедок 25. Каждая лебедка 25 систем 23 хранения снабжена модулем 26 управления, который заставляет тросы 4 должным образом наматываться на соответствующую лебедку 25.
В результате тросы 4 представляют собой элемент, который соединяет воздушные змеи 2 и модули 5 ветровой системы 1, а также передает силы между ними. Когда цепочка 3 воздушных змеев 2 поднимается ветром W, возникает эффект буксирования, который вызывает поступательное перемещение модуля 5 и, как следствие, преобразование энергии ветра в электрическую энергию при помощи генераторов 20 и/или 21. Очевидно, что длина и диаметр каждого троса 4 зависят от параметров ветра и условий безопасности, в которых должен работать трос.
Далее, ветровая система 1, соответствующая настоящему изобретению, содержит, по меньшей мере, одну направляющую 6, по которой поступательно перемещаются модули 5, буксируемые воздушными змеями 2. Как указано ранее, модули 5 ветровой системы 1 могут поступательно перемещаться по множеству направляющих 6 и 7, чтобы распределить вес систем 8 возврата в исходное положение воздушных змеев 2.
Направляющие 6 и 7 в предпочтительном случае выполнены в виде замкнутого контура. Простейшим контуром является окружность, но допускается выбор контура для оптимизации использования энергии ветра. Например, если предполагается реализовать ветровую систему 1 в зоне, в которой ветер W дует, главным образом, в одном направлении, имеет смысл сделать так, чтобы модули 5 ветровой системы 1 описывали траекторию в виде эллипса, главная ось которого перпендикулярна направлению, в котором дует ветер W. Такой выбор продиктован тем фактом, что тяга для модулей 5 ветровой системы 1, создаваемая воздушными змеями 2, возникает за счет использования компонента подъемной силы, который создается при встрече струй ветра с воздушными змеями 2, как более подробно рассмотрено ниже.
Если направляющие 6 и 7 выполнены в виде замкнутого контура, на модули 5 ветровой системы 1 действует направленная по радиусу центробежная сила, вызванная движением модулей 5 и радиальным компонентом тянущего усилия цепочки 3 воздушных змеев 2. Чтобы противодействовать этой силе, имеет смысл подходящим образом наклонить направляющие 6 ветровой системы 1 (не показано). Параметры наклона направляющей 6 можно легко получить путем разложения сил, действующих на колеса 16 модулей 5. Очевидно, что при поступательном перемещении модулей 5 ветровой системы 1 по множеству направляющих 6 и 7 эти направляющие 6 и 7 должны быть параллельными и концентричными.
В предпочтительном случае направляющие 6 и 7 размещены не на земле, а поддерживаются в поднятом состоянии при помощи колонн. При установке модулей 5 на подходящей высоте отсутствует риск скольжения воздушных змеев 2 по земле, если воздушные змеи 2 случайно опустятся. Конструкции, поддерживающие направляющие 6 и 7, должны обладать большой инерционностью, чтобы обеспечить высокую степень устойчивости и удовлетворять требованию точности геометрических размеров, которая необходима тележкам 11 ветровой системы 1.
Как указано ранее, если ветровая система 1 имеет множество направляющих 6 и 7, имеет смысл разместить направляющие 6 на различных уровнях по высоте, чтобы обеспечить наклон систем 8 возврата в исходное положение относительно земли и в направлении цепочек 3 воздушных змеев 2. Это уменьшает сопротивление, действующее на тросы 4 со стороны систем 8 возврата в исходное положение при работе ветровой системы 1.
Направляющие 6 и 7, которыми снабжена ветровая система 1, могут быть разделены на две категории. Можно установить основные направляющие 6 и вспомогательные направляющие 7. Основные направляющие 6 представляют собой направляющие, по которым поступательно перемещаются тележки 11 модулей 5 ветровой системы 1. Вспомогательные направляющие 7 представляют собой направляющие, по которым поступательно перемещаются амортизированные колеса 17 и которые дополнительно несут вес систем 8 возврата в исходное положение воздушных змеев 2.
Направляющие 6 и 7 ветровой системы 1, предлагаемой настоящим изобретением, могут быть классическими или магнитными, в зависимости от того, движутся ли модули 5 ветровой системы 1 исключительно при помощи колес 16, 17 или за счет магнитной левитации. В частности, вспомогательные направляющие 7 в предпочтительном случае относятся к классическому типу, в то время как основные направляющие 6 также могут быть магнитными.
Классические основные направляющие 6 имеют такую форму, чтобы они "охватывали" нижнюю часть тележек 11, которые по ним движутся. Как будет более подробно описано ниже, тележки 11 модулей 5 ветровой системы 1, которые движутся по классическим направляющим 6, снабжены тремя группами колес 16. Если подробно рассмотреть один модуль 5, группа колес 16 должна нести большую часть веса модуля 5, действующего в вертикальном направлении, другие две группы колес 16 вносят свой вклад в предотвращение переворачивания модуля 5 под влиянием центробежной силы. Классические основные направляющие 6 используются на практике, чтобы сделать возможным качение колес 16 в двух горизонтальных плоскостях (нижней плоскости и верхней плоскости) и вертикальной плоскости. С этой целью направляющие 6 в сечении, например, имеют вид двух букв С, обращенных друг к другу своей вогнутой частью, как, в частности, показано на Фиг.12. Такая конфигурация не является необходимой для вспомогательных направляющих 7, если они относятся исключительно к классическому типу, и функция которых состоит только в том, что они являются дополнительной опорой для систем 8 возврата в исходное положение воздушных змеев 2. Амортизированные колеса 17 фактически катятся в одной плоскости и направляющие 7 имеют вид обычных направляющих.
В качестве альтернативы конфигурации в виде двойного "С" также можно сделать классические основные направляющие 6 такими, чтобы они имели, например, прямоугольное сечение, и установить группы колес 16 тележек 11 модулей 5 ветровой системы 1 таким образом, чтобы они охватывали направляющую 6 (не показано).
И, наконец, другой альтернативный вариант состоит в решении поменять положения (сверху - снизу) рельсов 6 по отношению к колесам 16 на обратные, а именно, чтобы колеса были установлены на уровне земли, а воздушные змеи 2 буксировали направляющую, чтобы установить все генераторы, связанные с колесами, в неподвижной части системы (не показано). Преимущество, обеспечиваемое этим вариантом, заключается в наличии простого электрического соединения, при котором нет необходимости в коллекторе или скользящих контактах.
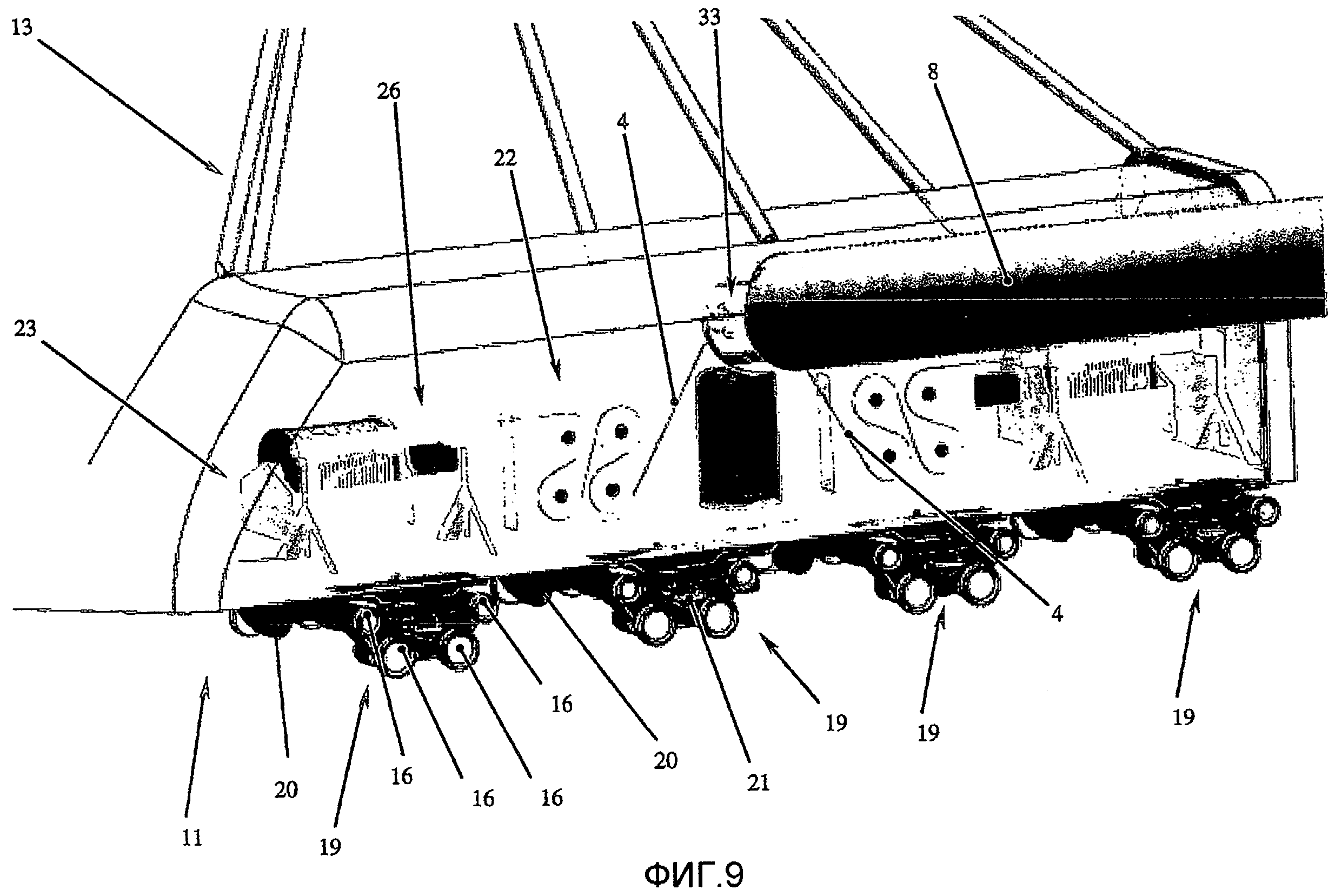
В случае использования классических основных направляющих 6, как более подробно описано ниже, преобразование энергии может происходить, например, при помощи генераторов 20, напрямую приводимых в действие за счет вращения колес 16. Однако в случае выработки каждым модулем 5 высоких уровней мощности классические направляющие 6 могут не подойти для приведения в действие генераторов 20 за счет вращения колес 16. Крутящий момент, который должен быть передан на генераторы 20, фактически может оказаться слишком высоким, чтобы его создавать путем простого использования трения качения между направляющей 6 и колесами 16, а сопротивление качению может оказаться таким, которое заставит колеса 16 скользить по направляющей 6. В этом случае, при необходимости все равно генерировать электрический ток без возвращения к реверсивному использованию линейных двигателей, с целью избежать рассеяния мощности и сделать возможным преобразование механической энергии в электрическую энергию, можно снабдить классическую направляющую 6, по меньшей мере, одной зубчатой рейкой 15, с которой входит в зацепление, по меньшей мере, одно зубчатое колесо 18, непосредственно приводящее в действие генератор 21. Как более подробно описано ниже, в этом случае колеса 16 тележек 11 выполняют, главным образом, функцию опоры. Зубчатую рейку 15 размещают на классической направляющей 6 таким образом, чтобы ее поверхность с зубьями была перпендикулярна поверхности направляющей 6 и ориентирована в направлении центра замкнутого контура, образованного направляющими 6. Зубчатое колесо 18, которое входит в зацепление с зубчатой рейкой 15 и перемещается по ней, вращаясь, расположено горизонтально и, благодаря такой конфигурации, противодействует центробежной силе. В результате центробежная сила, действующая на каждый модуль 5, используется (и в то же время компенсируется), чтобы гарантировать надежное сцепление зубчатого колеса 18 с зубчатой рейкой 15 при движении.
При необходимости использования магнитной левитации основные направляющие 6 снабжают электромагнитами и выполняют таким образом, чтобы сделать возможным магнитное подвешивание и/или преобразование энергии при реверсивном использовании линейных двигателей для генерации электричества, как более подробно описано ниже. Что касается магнитной левитации, напомним, что в настоящее время применяются три технологии:
- электромагнитное подвешивание: левитацию обеспечивают, используя обычные электромагниты (возможно, охлаждаемые при их температуре сверхпроводимости), размещенные на краю пары конструктивных элементов тележки 11, которые навиты напротив боковых сторон и нижней части направляющей 6. Магниты притягиваются к направляющей 6 и, таким образом, поддерживают тележку 11;
- электродинамическое подвешивание: левитацию обеспечивают, используя электромагниты, охлаждаемые при их температуре сверхпроводимости, которые размещены на тележке 11. Рядом с боковым стенками направляющей 6 имеются обмотки в форме восьмерки, в которых магнитное поле, созданное при помощи полупроводниковых обмоток, размещенных на тележке 11, индуцирует электрические токи, в результате чего рядом с каждой из половинок восьмерки возникают противоположные магнитные полюса. Магнитные полюса на верхнем уровне притягивают магнитное поле полупроводников тележки 11, магнитные полюса на нижнем уровне отталкивают его. Такая комбинация притяжения и отталкивания позволяет тележке левитировать;
- подвешивание посредством постоянных магнитов: левитацию обеспечивают, размещая постоянные магниты на тележке 11 и электромагниты, не обеспечиваемые питанием, на направляющей 6. Когда тележка 11 движется, постоянные магниты индуцируют в электромагнитах направляющей 6 электрические токи, которые создают отталкивающее магнитное поле относительно поля, созданного постоянными магнитами. Такое отталкивание заставляет тележку 11 левитировать.
В ветровой системе 1, соответствующей настоящему изобретению, в случае использования магнитной левитации предпочтительно применяют ту технологию, которая обеспечивает магнитное подвешивание при помощи постоянных магнитов, которые можно объединить с потоком, создаваемым соленоидами из сверхпроводника. Конфигурация магнитов и электромагнитов на направляющей 6 и на тележках 11 модулей 5, а также принцип получения магнитной левитации будут подробно описаны ниже вместе с режимами, с использованием которых происходит преобразование энергии и, следовательно, создание электрического тока.
Как будет более подробно указано ниже, даже в случае использования магнитной левитации целесообразно снабдить тележки 11 модулей 5 ветровой системы 1 колесами 16, которые дополнительно поддерживают воздушный зазор между магнитами модулей 5 и направляющими 6. Колеса 16, которые используются исключительно для поддержания воздушного зазора, например, аналогичны трем группам колес 16 тележек 11, движущимся по классическим основным направляющим 6, которые упомянуты ранее. В случае использования магнитной левитации основная направляющая 6, таким образом, может представлять собой комбинацию из описанной выше классической направляющей (с конфигурацией в виде двойной "С" или с альтернативной конфигурацией) и магнитной направляющей.
Каждый модуль 5 ветровой системы 1, таким образом, оборудован, по меньшей мере, одной тележкой 11, при помощи которой этот модуль 5 поступательно перемещается, по меньшей мере, по одной направляющей 6. В частности, как уже указано ранее, модули 5 могут быть снабжены одной тележкой 11, на которой размещены как генераторы 20 и/или 21, так и компоненты для управления воздушными змеями 2 и хранения тросов 4. Второй вариант состоит в оборудовании каждого модуля 5 двумя тележками 11: одной на большей высоте, которая снабжена компонентами, выполняющими преобразование энергии, и одной на меньшей высоте, на которой размещены лебедки 24 и 25 для наматывания тросов 4.
В предпочтительном случае имеется два режима движения тележки 11 по направляющей 6:
- в случае использования классической направляющей 6, тележка 11 поступательно перемещается по направляющей 6 при помощи гладких колес 16 и 17;
- в случае использования магнитной направляющей 6, тележка 11 поступательно перемещается по направляющей 6 при помощи постоянных магнитов и/или электромагнитов, используя принцип магнитной левитации.
Если тележка 11 поступательно перемещается по направляющей 6 при помощи колес 16, эти колеса 16 сопряжены с оставшейся частью модуля 5 ветровой системы 1, например, через пружины, установленные параллельно с гасителями колебаний. Как следствие, в модуле 5 обеспечивается поглощение энергии ударов.
Как уже указано ранее, можно разделить колеса 16, которыми снабжена тележка 11, с модулем 5 на три группы. Колеса 16, относящиеся к разным группам, расположены перпендикулярно по отношению друг к другу с получением Т-образной конфигурации. В частности, если предположить, что направляющие 6 лежат в горизонтальной плоскости, то имеются:
- колеса 16, катящиеся в горизонтальной плоскости, которые несут большую часть веса тележки 11;
- колеса 16, катящиеся в вертикальной плоскости, которые противодействуют радиальной силе, приложенной к тележке 11;
- колеса 16, катящиеся в горизонтальной плоскости, которые предотвращают переворачивание тележки 11.
Благодаря наличию такой системы колес 16, тележка 11 удерживается на площадке направляющей 6 с предотвращением возможности ее схождения с этой направляющей. Этот результат обеспечивается за счет придания подходящей формы классической направляющей 6. В частности, как указано ранее, можно сделать направляющую 6 такой, чтобы она имела сечение в виде двойного "С", в результате чего направляющая 6 будет "охватывать" нижнюю часть тележки 11. В качестве альтернативы можно использовать обычную направляющую, например, прямоугольного сечения и установить колеса 16 на тележке 11 таким образом, чтобы эти колеса 16 охватывали направляющую 6 (не показано).
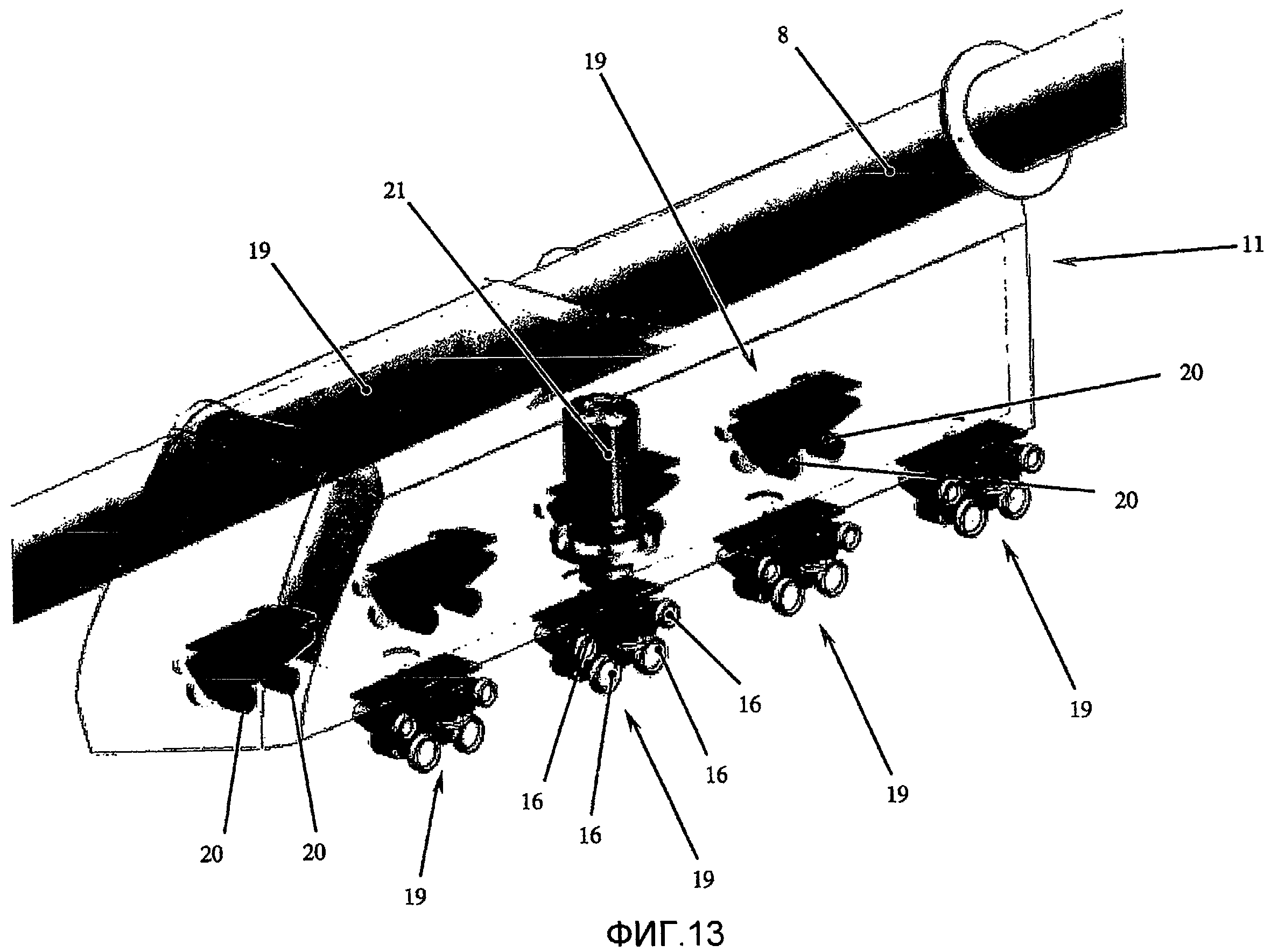
Вне зависимости от примененного варианта, отдельные колеса 16 напрямую не связаны с плоской платформой тележки 11, а объединены в тележки 19, которые, в свою очередь, связаны с упомянутой плоской платформой. Это решение, также применяемое в железнодорожном транспорте, придает больше устойчивости системе.
В случае использования магнитной направляющей 6, воздушный зазор между магнитами модуля 5 и электромагнитами направляющей 6 в значительной степени уменьшается, и существует большой риск того, что модуль 5 и направляющая 6 станут контактировать. Это обусловлено как большой массой модулей 5 ветровой системы 1, предлагаемой настоящим изобретением, так и типом и величиной напряжений, которые действуют на эти модули 5. Чтобы гарантировать поддержание воздушного зазора, целесообразно также снабдить тележки 11 с магнитной левитацией колесами 16, которые выполняют исключительно функцию опоры для модуля 5, не участвуя в генерации электрической энергии. Такие колеса 16 могут, например, быть идентичными колесам, при помощи которых тележка 11 поступательно перемещается по классической направляющей 6. Как указано ранее, в случае использования магнитной левитации, направляющая 6, по которой поступательно перемещаются модули 5, таким образом, может представлять собой комбинацию классической направляющей и магнитной направляющей.
В дополнение к поддержанию воздушного зазора, использование опорных колес 16 все равно может оказаться необходимым в случае использования подвешивания с постоянными магнитами в качестве технологии магнитного подвешивания. При выборе этой технологии отталкивающее магнитное поле фактически могло бы возникать только в условиях движения и, как следствие, при таком допущении левитация при неподвижном модуле 5 была бы невозможна. Наличие опорных колес 16 гарантирует, что даже при отсутствии левитации модули 5 и направляющая 6 не станут контактировать. Условия возможного принудительного передвижения модуля 5 без магнитной левитации более подробно описаны далее.
Системы 8 возврата в исходное положение представляют собой компоненты модулей 5 ветровой системы 1, используемые для возврата воздушных змеев 2 в состояние покоя. Ветровая система 1 снабжена одной системой 8 возврата в исходное положение для каждого модуля 5. В предпочтительном случае система возврата в исходное положение изготовлена в виде, по меньшей мере, одной цилиндрической трубы, предназначенной для размещения внутри нее всей цепочки 3 воздушных змеев 2. По этой причине системы 8 возврата в исходное положение являются одним из самых громоздких и тяжелых компонентов ветровой системы 1. Системы 8 возврата в исходное положение могут быть выполнены таким образом, чтобы они в условиях действия силы тяжести своим собственным весом противодействовали вертикальному компоненту тяги воздушных змеев 2. Хотя вертикальный компонент тянущего усилия воздушных змеев 2 служит дополнительным средством несения веса систем 8 возврата в исходное положение, целесообразно выполнить модули 5 ветровой системы 1 таким образом, чтобы предотвратить их переворачивание из-за веса систем 8 возврата в исходное положение. Это также необходимо в связи с тем, что вертикальный компонент тянущего усилия воздушных змеев 2 имеется только при работе ветровой системы 1. Когда ветровая система 1 находится в состоянии покоя, весь вес систем 8 возврата в исходное положение воспринимается направляющими 6.
В случае использования одной тележки 11 для каждого модуля 5, системы 8 возврата в исходное положение связаны с тележкой 11 в месте, расположенном рядом с тем их концом, где тросы 4 входят, проходя в направлении воздушных змеев 2. Чтобы избежать переворачивания модуля 5 из-за системы 8 возврата в исходное положение, вес этой системы 8 должна нести находящаяся в натянутом состоянии гибкая конструкция 12 и, возможно, амортизированные колеса 17, соединенные с системой 8 возврата в исходное положение, которые движутся по вспомогательным направляющим 7.
Если каждый модуль 5 ветровой системы 1 снабжен двумя тележками 11, система 8 возврата в исходное положение связана с этими тележками 11 в месте, расположенном рядом с концом. Тогда внутреннюю направляющую 6 размещают на меньшей высоте, чтобы обеспечить подходящий наклон системы 8 возврата в исходное положение с целью снизить до минимума сопротивление тросам 4 при работе ветровой системы 1. В частности, системы 8 возврата в исходное положение наклоняют вверх относительно горизонтальной плоскости (как, в частности, показано на Фиг.6 и 11). Такой наклон реализуют на практике также в случае использования одной тележки 11 для каждого модуля 5, например, размещая на меньших высотах вспомогательные направляющие 7, по которым движутся амортизированные колеса 17, служащие опорой системе 8 возврата в исходное положение.
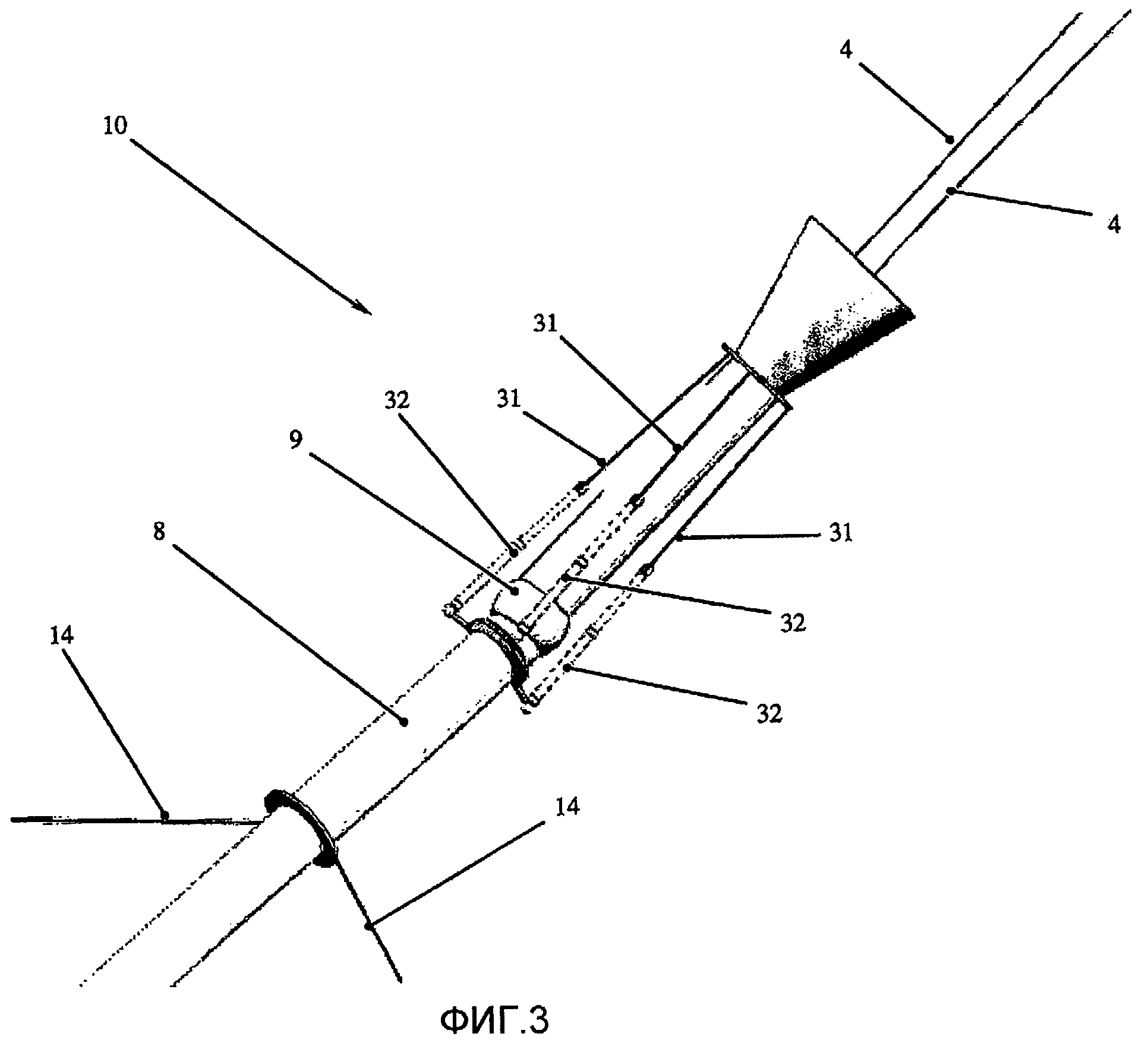
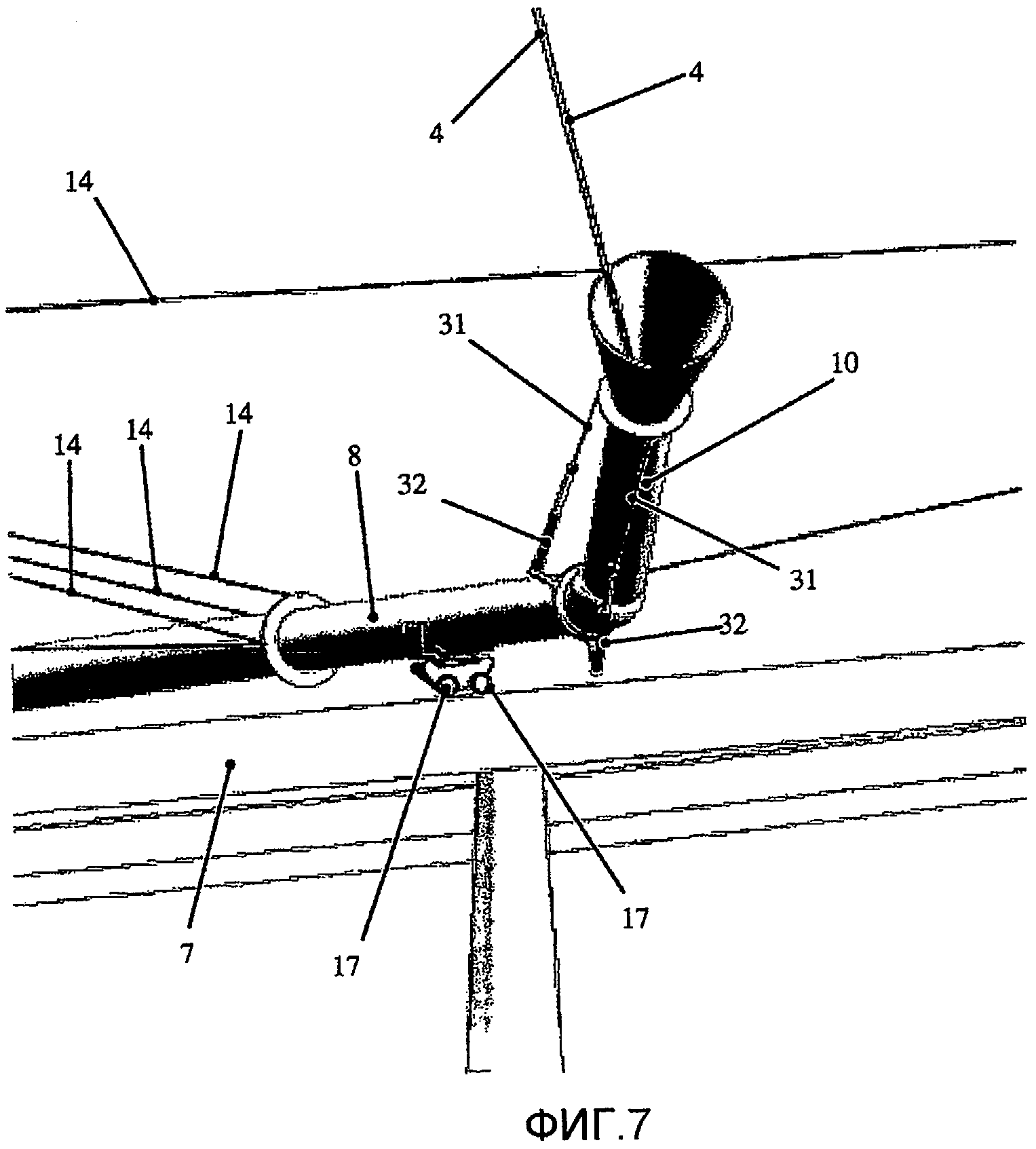
Вне зависимости от использования одной или двух тележек 11 для каждого модуля 5 концевая часть 10 систем 8 возврата в исходное положение реализована на практике таким образом, чтобы имелась возможность ориентировать ее как в горизонтальной, так и в вертикальной плоскости. Это позволяет облегчить операции возврата в исходное положение и выброса воздушных змеев 2 и, в частности, демпфирование переходных явлений в распределении сил. В частности, путем увеличения наклона концевой части 10 систем 8 возврата в исходное положение относительно горизонтальной плоскости во время операции выброса воздушных змеев 2 можно расположить верхний конец систем 8 возврата в исходное положение на высоте, которая сильно изменяет (уменьшая его) время, необходимое для их установки в рабочее положение, когда при полете воздушные змеи стартуют с большей высоты. Во время операций возврата воздушных змеев 2 в исходное положение концевую часть 10 системы 8 возврата в исходное положение выравнивают относительно оставшейся части системы 8, чтобы облегчить выполнение этой операции.
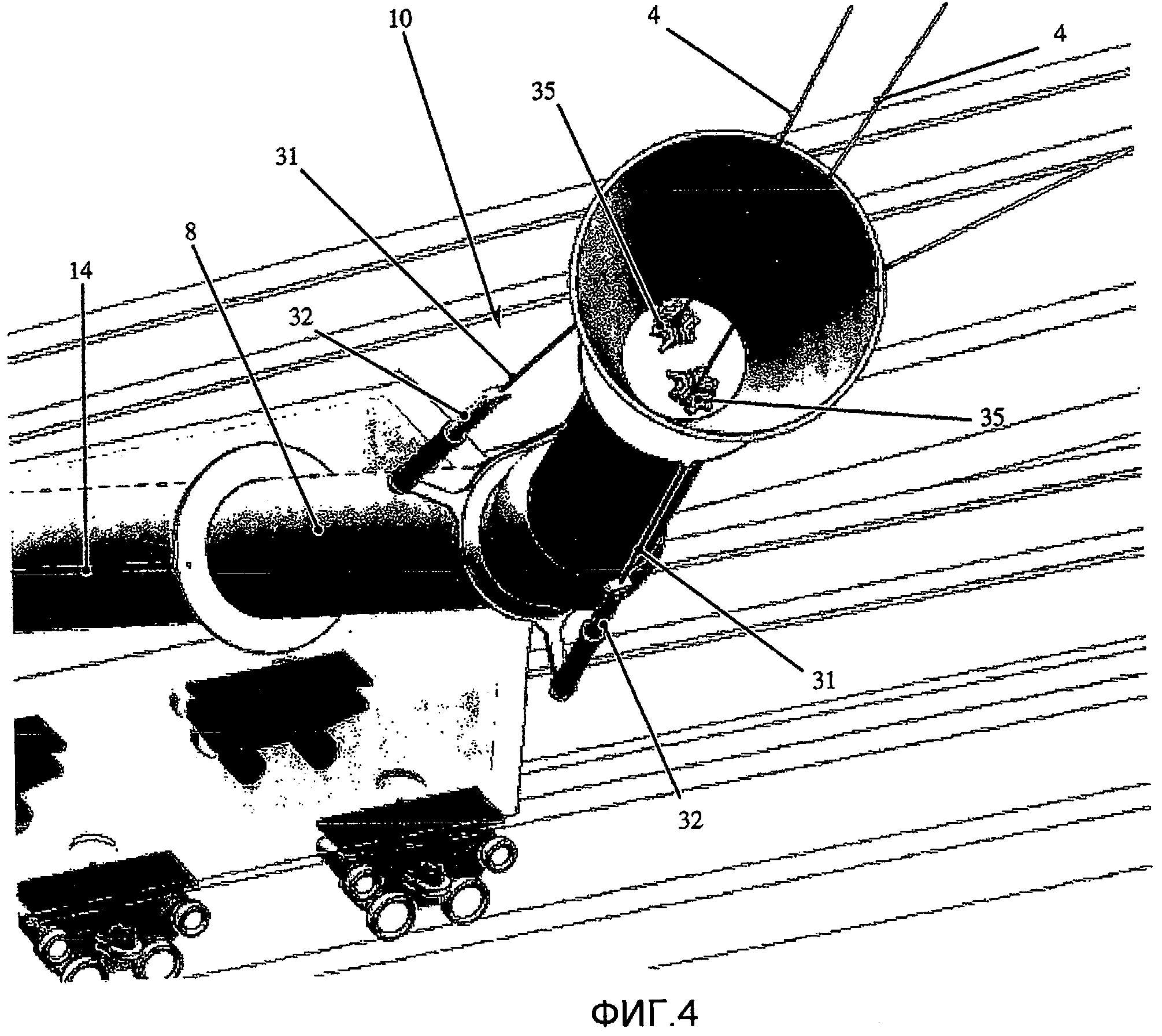
Способность концевой части 10 системы 8 возврата в исходное положение к ориентированию обеспечивают, например, путем создания, по меньшей мере, одного поворотного соединения 9 рядом с верхним концом системы 8 и управления концевой частью 10, находящейся выше поворотного соединения 9, при помощи системы из трех тросов 31, каждый из которых связан, по меньшей мере, с одним гидравлическим цилиндром 32, шарнирно прикрепленным к системе 8 возврата в исходное положение рядом с поворотным соединением 9. Данные гидравлические цилиндры 32 приводятся в действие гидравлической системой, управляемой интеллектуальной системой управления. В качестве альтернативы гидравлическим цилиндрам 32 можно использовать линейные электромеханические модули (не показаны).
Если модули 5 ветровой системы 1 снабжены двумя тележками 11 на каждый модуль 5, тележка 11, находящаяся рядом с выпускным краем системы 8 возврата в исходное положение, связана с той частью системы 8, которую нельзя ориентировать, до поворотного соединения 9.
Если ветровая система 1, соответствующая настоящему изобретению, снабжена одной тележкой 11 на каждый модуль 5, предлагается возможный вариант этой системы 1 (не показан), в котором не обязательно, чтобы имелась возможность ориентирования только концевой части 10 систем 8 возврата в исходное положение. Поворотное соединение 9, делающее возможным ориентирование, может быть размещено в любом месте системы 8 возврата в исходное положение, либо в начале этой системы 8, что позволяет ориентировать всю систему 8 в целом. В данном варианте концевой частью 10 систем 8 возврата в исходное положение также можно управлять, например, при помощи систем с тросами и гидравлическими цилиндрами. Если должна иметься возможность ориентирования в целом всей системы 8 возврата в исходное положение, маневр может осуществляться при помощи находящейся в натянутом состоянии гибкой конструкции 12, которая ее поддерживает.
Чтобы облегчить прохождение цепочки 3 воздушных змеев 2 во время возврата их в исходное положение и запуска, выпускной край систем 8 в предпочтительном случае выполнен в форме купола, и рядом с этим выпускным краем сечение концевой части 10 систем возврата в исходное положение увеличивается в направлении упомянутого выпускного края.
Хранение воздушных змеев 2 предусматривает наличие отверстия в системах 8 возврата в исходное положение для доступа операторов в целях выполнения возможного технического обслуживания.
Форма систем 8 возврата в исходное положение может быть просто цилиндрической, но, если оценки аэродинамического сопротивления вращению и сопротивления материалов предполагают иной подход, системы 8 возврата в исходное положение могут быть изготовлены с использованием конструкции в виде фермы (не показана), где доступ к воздушным змеям 2 и их размещение внутри обеспечиваются за счет системы заполнения стенок фермы. Минимально необходимым сечением фермы является треугольник, что обеспечивает достаточное пространство для хранения воздушных змеев 2 и прохождения тросов. Конкретное взаимное расположение элементов системы заполнения предотвращает возможное застревание при скольжении цепочки 3 воздушных змеев 2 на этапах выталкивания и возврата в исходное положение.
Внутри каждой системы 8 размещена система, при помощи которой происходит выталкивание и возврат в исходное положение воздушных змеев 2 вместе с сопровождающими тросами 4.
Система 2 возврата в исходное положение и выброса воздушных змеев 2 представляет собой компонент модуля 5 ветровой системы 1, который размещен внутри системы 8 возврата в исходное положение и при помощи которого происходит возврат в исходное положение и запуск воздушных змеев 2 при остановке и включении ветровой системы 1 соответственно.
Ветровая система 1, соответствующая настоящему изобретению, может быть снабжена, например, теми же системами возврата в исходное положение и выталкивания, которыми снабжена ветровая система с рычагами и вращающимся валом, описанная в упомянутой ранее заявке на патент Италии № ТО2006А000491, к которой можно обратиться для более подробного рассмотрения.
Если говорить в общем, каждая из данных систем возврата в исходное положение и выталкивания снабжена тележкой, которая поступательно перемещается по двум направляющим, заставляющим ее поступательно перемещаться внутри соответствующей системы 8 возврата в исходное положение параллельно оси этой системы 8. На одной тележке смонтирована пара систем выходных шкивов 35 для тросов 4. В случае использования одного троса 4 в качестве соединительного элемента между модулем 5 ветровой системы 1 и цепочкой 3 воздушных змеев 2, имеется одна система выходных шкивов 35 для троса 4, смонтированных на упомянутой тележке.
При возврате цепочки 3 воздушных змеев 2 в исходное положение, когда воздушные змеи 2 находятся рядом с системой 8 возврата в исходное положение, воздушные змеи 2 располагают параллельно оси этой системы 8 (посредством пары тросов 4 и/или интерцепторов), чтобы облегчить вход в эту систему 8.
Сделать запуск и возврат в исходное положение воздушных змеев 2 легче можно с использованием струй сжатого воздуха, подходящим образом дующих для выброса воздушных змеев 2 и работы с ними без необходимости контакта. Устройства для создания этого искусственного давления ветра (не показаны) могут быть размещены по длине систем 8 возврата в исходное положение и в концевой части 10. Маневры совершают с использованием множества точек подачи воздуха, геометрическое положение которых должно обеспечить значительное число степеней свободы, и ими управляют при помощи интеллектуальной системы управления, чтобы получить на практике устройство для точной и быстрой работы со змеями.
Те же устройства создания искусственного давления ветра могут помочь в возврате цепочек 3 воздушных змеев 2 в исходное положение. Фактически, посредством этих устройств можно создавать искусственные потоки воздуха, с использованием которых гарантируется управляемость воздушных змеев 2, когда упомянутые змеи 2 находятся рядом с системами 8 возврата в исходное положение.
Запуск воздушных змеев 2 требует, по меньшей мере, наличия легкого бриза на уровне земли. В случае недостаточного ветра на малых высотах, приводят в действие рассмотренные ниже двигатели 20, чтобы привести в действие модули 5 ветровой системы 1 для искусственного создания бриза, который позволяет воздушным змеям 2 набрать высоту.
Ветровая система 1 снабжена системой возврата в исходное положение и выталкивания воздушных змеев 2, находящейся рядом с каждым модулем 5.
Что касается возврата воздушных змеев 2 в исходное положение, альтернативное решение состоит в размещении систем 8 возврата в исходное положение на земле вместо ее размещения на борту модулей 5 ветровой системы 1. Такое решение предполагает значительные преимущества. Во-первых, каждый модуль 5 ветровой системы 1 снабжен одной тележкой 11 (так как внешняя тележка, приспособленная для использования в качестве опоры системы 8 возврата в исходное положение, больше не нужна), и ветровая система 1, таким образом, будет иметь одну направляющую 6. Другое преимущество состоит в том, что значительно уменьшается инерционность каждого модуля 5 по сравнению с решением, использующим системы 8 возврата в исходное положение, составляющие с модулями 5 единое целое, в результате чего снижается энергия, которая должна быть затрачена при включении ветровой системы 1. И, наконец, улучшается аэродинамика тележек ветровой системы 1, так как более не имеется аэродинамического трения, создаваемого системами 8 возврата в исходное положение. Это позволяет увеличить эффективность преобразования энергии при той же энергии ветра, захваченной воздушными змеями 2.
Системы 8 возврата в исходное положение, находящиеся на земле, могут представлять собой, например, контейнеры с откидной крышкой, размещенные у земли. Форма упомянутых контейнеров приспособлена для размещения внутри них, по меньшей мере, одной цепочки 3 воздушных змеев 2. В горизонтальной плоскости системы 8 возврата в исходное положение имеют радиальное расположение и могут быть размещены внутри и снаружи замкнутого контура, образуемого направляющей 6. Что касается наклона систем 8 возврата в исходное положение относительно земли, то во время операций возврата воздушных змеев 2 в исходное положение и запуска этих змеев системы 8 возврата в исходное положение наклоняют вверх (чтобы облегчить эти операции), при том что в течение оставшегося периода времени системы 8 возврата в исходное положение установлены в почти горизонтальном положении. В частности, каждая система 8 возврата в исходное положение способна выполнять два вида перемещения: вращение - поступательное перемещение и перемещение при убирании.
Вращение - поступательное перемещение состоит в подъеме системы 8 возврата в исходное положение путем подходящего наклонения ее вверх. С каждой системой 8 возврата в исходное положение работают при помощи установленных сбоку линейных исполнительных механизмов 37. Эти исполнительные механизмы 37 установлены с двух сторон от системы 8 возврата в исходное положение и шарнирно соединены с землей, а также с конструкциями, которые могут быть схематично представлены в виде штанг 36, в свою очередь, шарнирно соединенных с землей, а также шарнирно соединенных с корпусом 38 системы 8 возврата в исходное положение (как показано на Фиг.18 и 19). За счет приведения в действие исполнительных механизмов 37 можно поднимать и наклонять систему 8 возврата в исходное положение, устанавливая конец, ближайший к направляющей 6, на той же высоте, на которой находится эта направляющая 6, и устанавливая другой конец на большей высоте. Линейные исполнительные механизмы 37 представляют собой, например, гидравлические цилиндры, приводимые в действие гидравлической системой, которой управляет интеллектуальная система управления. В качестве альтернативы гидравлическим цилиндрам можно использовать электромеханические линейные модули. Вращение - поступательное перемещение происходит при включении и остановке ветровой системы 1, чтобы, соответственно, облегчить операции запуска воздушных змеев 2 и их возврата в исходное положение.
Перемещение при убирании состоит в открывании системы 8 возврата в исходное положение таким образом, чтобы эта система 8 превратилась в платформу, пригодную для размещения на ней, по меньшей мере, одной цепочки 3 воздушных змеев 2. Как уже указано ранее, системы 8 возврата в исходное положение, расположенные на земле, могут представлять собой, например, контейнеры с откидной крышкой, поэтому их конструкция отличается относительно решения с системами 8 возврата в исходное положение, расположенными на борту модулей 5 ветровой системы 1. Во-первых, так как систему 8 возврата в исходное положение необходимо открывать как платформу, наиболее подходящей формой для таких систем 8 возврата в исходное положение более не является форма в виде цилиндрической трубы. Помимо этого, более нет возможности ориентировать концевую часть 10 наземных систем 8 возврата в исходное положение, и внутри этих систем отсутствуют тележки системы возврата в исходное положение и выталкивания. Каждая система 8 возврата в исходное положение, если рассматривать ее в продольном сечении, состоит, например, из трех частей 38 и 39. Как, в частности, показано на Фиг.20, две части 39 образуют крышку системы 8 возврата в исходное положение, которую можно открывать, а третья часть 38 представляет собой корпус контейнера системы 8 возврата в исходное положение. Корпус 38 системы 8 возврата в исходное положение установлен таким образом, чтобы его полость была обращена вверх, а другие две части 39 шарнирно соединены с корпусом 38, чтобы создать конструкцию, которую можно открывать и закрывать, в результате чего система 8 возврата в исходное положение принимает вид платформы. Открывание контейнеров 8 как платформ происходит при включении и остановке ветровой системы 1, а именно для запуска воздушных змеев 2 и их возврата в исходное положение, соответственно. После завершения операций запуска или возврата в исходное положение системы 8 возврата в исходное положение снова закрывают.
Как и в случае вращения - поступательного перемещения, перемещение при убирании также осуществляют, например, при помощи исполнительных механизмов (не показаны). Эти исполнительные механизмы могут представлять собой гидравлические цилиндры, приводимые в действие гидравлической системой (или линейными электромеханическими модулями), которой управляет интеллектуальная система управления.
Если снова обратиться к версии ветровой системы 1, в которой системы 8 возврата в исходное положение размещены на земле, можно применить два решения. Первой решение состоит в оборудовании ветровой системы 1 двумя системами 8 возврата в исходное положение для каждого модуля 5 (и, следовательно, для каждой цепочки 3 воздушных змеев 2); второе решение состоит в использовании меньшего числа систем 8 возврата в исходное положение по сравнению с числом модулей 5 ветровой системы 1.
Если ветровая система 1 снабжена двумя системами 8 возврата в исходное положение для каждого модуля 5, каждая цепочка 3 воздушных змеев 2 имеет в наличии два контейнера, в которые она может быть возвращена: один, размещенный внутри замкнутого контура, образованного направляющей 6, и другой, размещенный снаружи этого контура. При применении этого решения цепочку 3 воздушных змеев 2 можно возвращать в одну систему 8 возврата в исходное положение или в другую такую систему 8 в соответствии с тем, что позволяет ветер W.
Если вместо этого ветровая система 1 снабжена несколькими системами 8 возврата в исходное положение, число которых меньше числа модулей 5, не является важным то, где могут быть размещены системы 8 возврата в исходное положение, внутри или снаружи замкнутого контура, образованного направляющей 6, и каждая система 8 возврата в исходное положение предназначена для размещения внутри нее более одной цепочки 3 воздушных змеев 2. По этой причине в данном случае тросы 4, предназначенные для управления воздушными змеями 2, снабжены автоматической системой сцепления/расцепления (не показана), при помощи которой тросы 4 можно обратимым образом прицеплять к цепочкам 3 воздушных змеев 2 и отцеплять от них. Из-за такой автоматической системы цепочку 3 воздушных змеев 2 возвращают в исходное положение, только когда она находится рядом с системой 8 возврата в исходное положение и условия ветра являются благоприятными. Когда возврат в исходное положение заканчивается, тросы 4, соединяющие модуль 5 с соответствующей цепочкой 3 воздушных змеев 2, отцепляют от этой цепочки 3 воздушных змеев 2, чтобы сделать возможным продвижение модулей 5 и возврат в исходное положение цепочки 3 воздушных змеев 2 следующего модуля 5. Аналогичным образом, при помощи той же автоматической системы сцепления/расцепления тросы 4 снова прицепляют к цепочке 3 воздушных змеев 2 при включении ветровой системы 1, при запуске воздушных змеев 2. Очевидно, что автоматическая система для сцепления/расцепления тросов 4 является лишней, если ветровая система 1 снабжена двумя системами 8 возврата в исходное положение на каждый модуль 5, так как в этом случае каждая тележка 11 ветровой системы 1 остается связанной с соответствующей цепочкой 3 воздушных змеев 2, даже если ветровая система 1 находится в состоянии покоя. Чтобы сделать возможным размещение внутри системы 8 возврата в исходное положение множества цепочек 3 воздушных змеев 2, дополнительно необходимо снабдить каждую систему 8 возврата в исходное положение автоматической системой хранения (не показана), при помощи которой можно последовательно возвращать в исходное положение или запускать множество цепочек 3 воздушных змеев 2 и в определенном порядке располагать цепочки 3 воздушных змеев 2 внутри системы 8 возврата в исходное положение. Такая автоматическая система хранения состоит, например, из поступательно перемещаемых при помощи ремней полок, которыми управляет интеллектуальная система управления. Полки перемещаются поступательно, при этом оставаясь параллельными, и описывают замкнутую траекторию, чтобы сделать возможным быстрое выполнение последовательности операций посадки, хранения и запуска цепочек 3 воздушных змеев 2.
Аналогично решению, отличительной особенностью которого является размещение систем 8 возврата в исходное положение на борту модулей 5 ветровой системы 1, облегчить запуск воздушных змеев 2 и их возврат в исходное положение можно с использованием струй сжатого воздуха, подходящим образом подаваемых для выброса воздушных змеев и работы с ними без необходимости контакта. Устройства для создания этого искусственного давления ветра установлены по длине систем 8 возврата в исходное положение, и маневрами управляют при помощи интеллектуальной системы управления, чтобы реализовать на практике устройство для точной и быстрой работы со змеями. Те же устройства создания искусственного давления ветра могут помочь в возврате цепочек 3 воздушных змеев 2 в исходное положение. При помощи этих устройств фактически можно создавать искусственные потоки воздуха, при использовании которых гарантируется управляемость воздушных змеев 2, когда эти змеи 2 находятся рядом с системами 8 возврата в исходное положение.
В случае наземных систем 8 возврата в исходное положение, рядом с концом системы 8 возврата в исходное положение можно разместить скрываемую направляющую систему (не показана), при помощи которой появляется возможность перевести цепочку 3 воздушных змеев 2 в состояние покоя на платформе. Эта скрываемая направляющая система должна облегчить прием цепочки 3 воздушных змеев 2 системой 8 возврата в исходное положение и состоит, например, из пары штанг, размещенных по сторонам системы 8 возврата в исходное положение и перед этой системой. Штанги поднимают в почти вертикальное положение непосредственно перед этапом посадки, чтобы они содержали средства указания возможного пути для цепочки 3 воздушных змеев 2 и направляли ее к системе 8 возврата в исходное положение, открытой как платформа. Эта скрываемая направляющая система также управляется интеллектуальной системой управления.
Подводя итог, можно сказать, что при размещении систем 8 возврата воздушных змеев 2 в исходное положение на земле, исходя из предположения, что ветровая система 1 снабжена двумя системами 8 возврата в исходное положение для каждой цепочки 3 воздушных змеев, операция возврата воздушных змеев 2 в исходное положение происходит следующим образом:
- тросы 4, соединяющие цепочку 3 воздушных змеев 2 с тележками 11 ветровой системы 1, повторно наматывают, чтобы расположить цепочки 3 воздушных змеев 2 рядом с тележкой 11;
- приводят в действие скрываемые направляющие системы и, за счет вращения - поступательного перемещения и перемещения при убирании системы 8 возврата в исходное положение поднимают, наклоняют вверх и открывают как платформу;
- ход модулей 5 ветровой системы 1 останавливают, и при помощи устройств создания искусственного давления ветра цепочки 3 воздушных змеев 2 одновременно укладывают на соответствующие платформы, внутри или снаружи замкнутого контура, образованного направляющей 6; и
- системы 8 возврата в исходное положение снова закрывают и заставляют их выполнить вращение - поступательное перемещение, чтобы расположить их у земли.
Если каждая система 8 возврата в исходное положение предназначена для размещения внутри нее множества цепочек 3 воздушных змеев 2, то операция возврата в исходное положение не происходит одновременно для всех цепочек 3 воздушных змеев 2. Ход ветровой системы 1 останавливают, чтобы сделать возможной посадку такого числа цепочек 3 воздушных змеев 2, которое равно числу систем 8 возврата в исходное положение. Теперь, при помощи автоматической системы сцепления/расцепления, тросы отцепляют от совершивших посадку цепочек 3 воздушных змеев 2, и автоматические системы хранения возвращают цепочки 3 воздушных змеев 2 в исходное положение, делая доступными свободные площадки для посадки других воздушных змеев 2. Ветровая система 1 включается снова, и модули 5, отцепленные от цепочек 3 воздушных змеев 2, продолжают двигаться по направляющей 6, чтобы сделать возможным возврат в исходное положение цепочек 3 воздушных змеев 2 следующих модулей 5. После того как все цепочки 3 воздушных змеев 2 возвращены в исходное положение в соответствующие контейнеры, системы 8 возврата в исходное положение снова закрывают и опускают, чтобы установить у земли.
Запуск воздушных змеев происходит с использованием той же последовательности операций, но выполняемой в обратном порядке. Если снова обратиться к случаю, в котором каждая система 8 возврата в исходное положение предназначена для размещения внутри нее одной цепочки 3 воздушных змеев 2, системы 8 поднимают, наклоняют вверх и открывают как платформу. После чего приводят в действие устройства создания искусственного давления ветра, чтобы выбросить цепочки 3 воздушных змеев 2, и модули 5 ветровой системы 1 продвигают по направляющей 6 при помощи двигателей 20, управляемых интеллектуальной системой управления, создавая на уровне цепочек 3 воздушных змеев 2 легкий бриз, позволяющий воздушным змеям 2 набрать высоту.
Если же каждая система 8 возврата в исходное положение предназначена для размещения внутри нее множества цепочек 3 воздушных змеев 2, то аналогично этапу посадки этап запуска также выполняется одновременно для всех цепочек 3 воздушных змеев 2. В этом случае, после того как системы 8 возврата в исходное положение подняты, наклонены вверх и открыты как платформа, при помощи автоматической системы сцепления/расцепления тросы 4 сцепляют с цепочками 3 воздушных змеев 2, которые должны взлететь. После взлета воздушных змеев 2 модули 5, сцепленные с цепочками 3 воздушных змеев 2, продвигаются по направляющей 6, чтобы позволить сцепить цепочки 3 воздушных змеев 2 со следующими модулями 5. После того как все цепочки 3 воздушных змеев 2 совершили свой взлет, системы 8 возврата в исходное положение снова закрывают и опускают, чтобы установить у земли.
Далее, ветровая система 1, соответствующая настоящему изобретению, содержит, по меньшей мере, одну систему передачи.
Системы передачи представляют собой компоненты модулей 5 ветровой системы 1, которые управляют тросами 4 между воздушными змеями 2 и системами 22 наматывания/разматывания тросов 4. Системы передачи состоят из шкивов, смонтированных на модулях 5 ветровой системы 1.
Каждый модуль 5 ветровой системы 1 снабжен системой передачи, в которой в предпочтительном случае имеется два ряда шкивов, по одному для каждого из двух тросов 4, с использованием которых управляют воздушными змеями 2. В случае использования одного троса 4 в качестве элемента, соединяющего между собой модуль 5 ветровой системы 1 и воздушные змеи 2, каждый модуль 5 снабжен одним рядом шкивов.
Шкивы, имеющиеся в каждой системе передачи, можно разделить на четыре категории:
- шкивы 35, смонтированные на тележке системы возврата в исходное положение и выталкивания воздушных змеев 2;
- стационарные шкивы 33, непосредственно связанные с модулем 5 ветровой системы 1;
- шкивы, являющиеся частью систем демпфирования пиковых значений силы для тросов 4, рассмотренных ниже;
- шкивы, являющиеся частью системы создания трения в тросах 4, рассмотренной ниже;
- шкивы 34, смонтированные на ползунах модулей 26 управления тросами 4 (по одному для каждого ползуна 27).
В случае использования двух тележек 11 для каждого модуля 5 ветровой системы 1, за исключением шкивов, которыми снабжена система возврата в исходное положение и выталкивания воздушных змеев 2, все другие шкивы 33 размещены на тележке 11 модуля 5, находящегося на меньшей высоте. Общее число шкивов, входящих в состав системы передачи, очевидно, зависит от размеров тележки 11.
Далее, ветровая система 1, соответствующая настоящему изобретению, содержит, по меньшей мере, одну систему демпфирования пиковых значений силы для тросов 4 (не показана).
Системы демпфирования пиковых значений силы для тросов 4 представляют собой компоненты ветровой системы 1, которые компенсируют внезапные изменения нагрузки, имеющие небольшую величину, которые тросы 4 не смогли демпфировать. Системы демпфирования пиковых значений силы размещены между системами 22 наматывания/разматывания тросов 4 и системой 8 возврата в исходное положение.
Ветровая система 1, соответствующая настоящему изобретению, может быть снабжена, например, системой демпфирования пиковых значений силы, описанной в упомянутой ранее заявке на патент Италии № ТО2006А000491, к которой можно обратиться за более подробным объяснением.
Если говорить в общем, каждая система демпфирования пиковых значений силы состоит из шкива, соединенного с амортизированным противовесом, поднимаемым от земли и выполненным с возможностью поступательного перемещения по вертикали, который связан с подходящей направляющей. На шкив наматывают трос 4, с использованием которого цепочкой 3 воздушных змеев 2 управляют таким образом, что именно натяжение троса 4 удерживает противовес в поднятом состоянии. Каждый модуль 5 ветровой системы 1, предлагаемой настоящим изобретением, должен быть снабжен, по меньшей мере, одной системой демпфирования пиковых значений силы для каждого тягового троса 4, с использованием которого происходит управление воздушными змеями 2.
Далее, ветровая система 1, соответствующая настоящему изобретению, содержит, по меньшей мере, одну систему создания трения в тросах 4 (не показана).
Системы создания трения в тросах 4 представляют собой компоненты ветровой системы 1, которые блокируют тросы 4 при отсутствии нагрузки и вносят свой вклад в компенсацию внезапных изменений нагрузки, имеющих небольшую величину, которые тросы 4 не способны демпфировать. Системы создания трения размещены между системами 22 наматывания/разматывания тросов 4 и системой 8 возврата в исходное положение.
Системы создания трения, которые входят в состав ветровой системы 1, соответствующей настоящему изобретению, содержат, например, шкив, связанный с линейной направляющей. Параллельно направлению поступательного перемещения, задаваемому линейной направляющей, размещена амортизированная пружина, связанная у одного своего конца со шкивом и у другого своего конца с тележкой 11. На шкив наматывается трос 4, с использованием которого цепочкой 3 воздушных змеев 2 управляют таким образом, что при натяжении троса 4 пружина сжимается. Когда в тросе 4 происходит внезапное увеличение нагрузки на трос 4, это увеличение нагрузки частично ослабляется за счет сжатия пружины. Однако при этом основная функция этой системы создания трения заключается в блокировании троса 4 при отсутствии нагрузки. Пружину фактически можно нагружать предварительно таким образом, чтобы при отсутствии нагрузки на трос 4 сам трос 4 сжимался под действием пружины между системой создания трения, в которой возникло тянущее усилие, и вторым шкивом.
Каждый модуль 5 ветровой системы 1, предлагаемой настоящим изобретением, должен быть снабжен, по меньшей мере, одной системой создания трения для каждого тягового троса 4, с использованием которого происходит управление воздушными змеями 2.
Далее, ветровая система 1, соответствующая настоящему изобретению, содержит, по меньшей мере, одну систему 22 наматывания/разматывания тросов 4 (не показана).
Системы 22 наматывания/разматывания тросов 4 представляют собой компоненты модуля 5 ветровой системы 1, размещенные между системами создания трения (или системами демпфирования пиковых значений силы) и системами 23 хранения тросов 4, рассмотренными ниже.
Ветровая система 1, соответствующая настоящему изобретению, может быть снабжена, например, теми же системами 22 наматывания/разматывания тросов 4, которые описаны в упомянутой ранее заявке на патент Италии № ТО2006А000491, к которой необходимо обратиться за более подробным объяснением.
Если говорить в общем, каждый модуль 5 ветровой системы 1 снабжен системой 22 наматывания/разматывания, содержащей две пары из четырех лебедок 24, вокруг которых наматывают пару тросов 4 соответствующей цепочки 3 воздушных змеев 2. Каждый трос 4, выходящий из системы создания трения, наматывается вокруг четырех соответствующих лебедок 24 системы 22 наматывания/разматывания, после чего он направляется к системе хранения 23. Системы 22 наматывания/разматывания предназначены для поддержания тросов 4 на всей их длине в натянутом состоянии.
Четыре лебедки 24, вокруг которых намотан каждый трос, установлены на двух уровнях (две на большей высоте и две на меньшей высоте) и имеют параллельные оси вращения. В среднем каждый трос 4 огибает приблизительно три четверти окружности каждой из этих лебедок 24. Так как имеется четыре лебедки 24 для каждого троса 4, в итоге наматывание троса 4 на лебедки 24 представленной системы эквивалентно трем полным виткам троса 4 на одной лебедке. Четыре лебедки 24, которые огибает один и тот же трос, соединены, например, посредством зубчатых колес с двигателем 28 (возможно, с промежуточным редуктором), работой которого управляют при помощи интеллектуальной системы управления. Именно при помощи этих лебедок 24 происходит управление воздушными змеями 2. Альтернативное решение (не показано) состоит в использовании двигателя для каждой лебедки 24. В целях упрощения ниже будет рассмотрен случай, в котором системы 22 наматывания/разматывания тросов 4 снабжены одним двигателем 28 для каждых четырех лебедок 24, которые огибает один трос 4.
Трение между каждой лебедкой 24 и тросом 4 может быть увеличено за счет придания поверхности лебедок 24 подходящей формы с целью размещения на них троса 4 с увеличением площади контакта между этим тросом 4 и лебедкой 24.
Всегда имея в виду один трос 4, можно сделать разной шероховатость поверхности четырех лебедок 24, чтобы постепенно увеличить трение между тросом 4 и лебедкой 24 в направлении к системам 23 хранения.
В случае использования одного троса 4 как элемента, соединяющего между собой модуль 5 ветровой системы 1 и воздушные змеи 2, система наматывания/разматывания тросов 4 снабжена только четырьмя лебедками 24. Это уменьшает громоздкость системы 22 наматывания/разматывания тросов 4 и инерционность модуля 5 ветровой системы 1, одновременно снижая потребление энергии при включении системы.
Необходимо помнить, что разделение системы 22 управления и системы 23 хранения для тросов 4 необходимо из-за значительной длины секций троса 4, соединенных с воздушными змеями 2. Если будет существовать фактически одна лебедка для каждого троса 4 (работающая, таким образом, как система управления и как система хранения), трос 4 будет полностью наматываться вокруг барабана лебедки, создавая множество слоев и, в то же время, неся значительные нагрузки. Этой ситуации необходимо избегать, так как трение, которое будет возникать из-за скольжения между разными витками троса 4, приведет к износу троса 4 в такой степени, что это ухудшит его механические свойства.
В качестве альтернативы системам 22 наматывания/разматывания тросов 4 типа "четыре лебедки" можно использовать, например, одну лебедку для каждого троса 4. В этом случае трос 4 наматывают вокруг такой лебедки, выполняя только ограниченное число оборотов (такое, чтобы имелся один слой витков), после чего трос направляют к системе 23 хранения. Вторая альтернатива состоит в использовании устройств, снабженных парой обращенных друг к другу направляющих средств, внутрь которых вставлен трос 4. Оба альтернативных решения для упомянутой выше системы 22 наматывания/разматывания тросов 4 также описаны в заявке на патент Италии № ТО2006А000491.
Далее, ветровая система 1, соответствующая настоящему изобретению, содержит, по меньшей мере, одну систему 23 хранения тросов 4 (не показана).
Системы 23 хранения тросов 4 представляют собой компоненты модуля 5 ветровой системы 1, на которые возложена задача хранения тросов 4 воздушных змеев 2.
Ветровая система 1, соответствующая настоящему изобретению, снабжена, например, теми же системами 23 хранения тросов 4, которые описаны в упомянутой ранее заявке на патент Италии № ТО2006А000491, к которой можно обратиться за более подробным объяснением.
Если говорить в общем, каждый модуль 5 ветровой системы 1 снабжен системой 23 хранения тросов 4, содержащей пару лебедок 25, вокруг которых наматывают пару тросов 4 соответствующей цепочки 3 воздушных змеев 2. Эти лебедки 25 соединены, через пару редукторов, с парой двигателей 29, работой которых управляет интеллектуальная система управления. Аналогично тому, что было указано ранее, в случае использования одного троса 4 как элемента, соединяющего между собой модуль 5 ветровой системы 1 и соответствующую цепочку 3 воздушных змеев 2, система 23 хранения тросов 4 снабжена одной лебедкой 25, которая через редуктор соединена с одним двигателем 29. Это уменьшает громоздкость системы 23 хранения тросов 4 и инерционность модуля 5 ветровой системы 1, одновременно снижая потребление энергии при включении системы.
Системы 23 хранения, кроме того, не служат для управления воздушными змеями 2. При этом натяжение тросов 4, намотанных вокруг лебедок 25 систем 23 хранения, гораздо ниже натяжения, которое может быть обнаружено в секциях троса 4, намотанных на лебедки 24 систем 22 наматывания/разматывания. Таким образом, если нагрузка на тросы 4 выше, число витков на лебедках 24 таково, чтобы тросы 4 никогда не располагались в два или более слоев. И, наоборот, на лебедках 25 систем 23 хранения тросы 4 наматываются во множество слоев, но натяжение является минимальным. Диаметр лебедок 25, входящих в состав систем 23 хранения, больше диаметра лебедок 24 систем 22 наматывания/разматывания, чтобы в любом случае снизить до минимума количество слоев при наматывании. Как следствие, на интеллектуальную систему управления также возложена задача синхронизировать вращение лебедок 24 и 25 системы 22 наматывания/разматывания тросов 4 и системы 23 хранения, вокруг которых наматывается один и тот же трос 4. Это является основополагающим принципом при контроле нагрузки на секцию троса 4, находящуюся между двумя системами 22 и 23, прежде всего, на этапах включения и остановки ветровой системы 1.
Так как на лебедках 25 систем 23 хранения тросов 4 витки образуют множество слоев, рядом с каждой лебедкой 25 управления необходимо разместить модуль 26 управления, который заставляет трос 4 должным образом наматываться на лебедку 25 и предотвращает скольжение между тросом 4 и боковыми поверхностями лебедки 25, а также между самими витками. Модули 26 управления тросами 4 представляют собой компоненты модулей 5 ветровой системы 1, которые заставляют тросы 4 должным образом наматываться на лебедки 25 систем 23 хранения и предотвращают скольжение между тросами 4 и боковыми поверхностями лебедок 25, а также между самими тросами 4.
Ветровая система 1, соответствующая настоящему изобретению, снабжена, например, теми же самыми модулями 26 управления тросами 4, которые описаны в упомянутой ранее заявке на патент Италии № ТО2006А000491, к которой можно обратиться за более подробным объяснением.
Если говорить в общем, эти модули 26 управления состоят из ползуна 27, связанного с направляющей, установленной параллельно оси вращения лебедки 25 соответствующей системы 23 хранения тросов 4. Ползун 27 способен поступательно перемещаться в двух направлениях, и на нем смонтирован шкив 34. В частности, этот ползун 27 приходит в движение при каждой подаче лебедки 25.
В модулях 26 управления тросами 4 поступательное перемещение ползуна 27 осуществляют при помощи электродвигателя 30, работой которого управляет интеллектуальная система управления, приводящая в действие воздушные змеи 2.
В ветровой системе 1 имеется модуль 26 управления тросами 4 для каждой лебедки 25 систем 23 хранения.
В качестве альтернативы использованию модулей 26 управления тросами 4 можно, например, разместить каждую лебедку 25 систем 23 хранения тросов 4 на тележке, которая поступательно перемещается по направляющей, размещенной параллельно оси вращения соответствующей лебедки 25. Скольжение тележки осуществляют при помощи электродвигателя, работой которого управляет интеллектуальная система управления. Это решение также описано в заявке на патент Италии № ТО2006А000491. При применении данного решения модуль 26 управления тросом 4 более не нужен, так как сама лебедка 25 совершает поступательное перемещение, чтобы обеспечить должное наматывание троса 4.
Модули 5 ветровой системы 1 снабжены электродвигателями, которые также работают как генераторы, и генераторами 20 и/или 21, которые также работают как двигатели.
Именно при помощи электродвигателей происходит приведение в действие лебедок 24 и 25, а также модулей 26 управления тросами 4.
В частности, для каждого троса 4 ветровая система 1 снабжена тремя электродвигателями:
- двигателем 28, ответственным за вращение лебедок 24 системы 22 наматывания/разматывания троса 4;
- двигателем 29, ответственным за вращение лебедки 25 системы 23 хранения троса 4;
- двигателем 30, ответственным за поступательное перемещение ползуна 27 модуля 26 управления тросом 4 (или тележки, на которой смонтирована лебедка 25 системы 23 хранения тросов 4).
Для перемещения концевой части 10 систем 8 возврата в исходное положение каждый модуль 5 ветровой системы 1 дополнительно снабжен гидравлической системой, которая приводит в действие гидравлические цилиндры 32, либо линейными электромеханическими модулями.
Каждый из двигателей 28, 29 и 30 может быть сопряжен с соответствующей лебедкой 24 и 25 или модулем 26 управления тросами 4 через редуктор, например, эпициклоидного типа.
Так как данные двигатели 28 и 29 могут также работать как генераторы, есть возможность производить электричество при помощи двигателей 28, соединенных с лебедками 24 системы 22 наматывания/разматывания тросов 4, используя тягу, воздействующую со стороны воздушных змеев 2 на упомянутые лебедки 24. Электродвигателями управляют при помощи интеллектуальной системы управления, и электродвигатели, соответствующие одному и тому же тросу 4 воздушных змеев 2, должны работать синхронно.
Чтобы произвести электричество с использованием тяги, воздействующей на модули 5 ветровой системы 1 со стороны воздушных змеев 2, можно применить множество решений, которые также зависят от режима поступательного перемещения модулей 5 по направляющим 6.
Производство электричества может осуществляться при помощи генераторов/двигателей 20, приводимых в действие непосредственно за счет вращения колес 16, посредством которых модули 5 ветровой системы 1 движутся по классической направляющей 6 (либо приводимых в действие за счет вращения колес 16 тележек 11, используемых для преобразования энергии).
Как указано ранее, производство электричества может также осуществляться при помощи генераторов 21, приводимых в действие за счет вращения зубчатых колес 18, которые катятся, по меньшей мере, по одной зубчатой рейке 15, размещенной на классической направляющей 6, по которой движутся модули 5 ветровой системы 1.
И, наконец, производство электричества может осуществляться за счет использования реверсивных магнитных линейных двигателей, в результате чего они работают как генераторы.
В железнодорожном транспорте с магнитной левитацией магнитное отталкивание и притяжение используются не только для левитации состава, но также и как средство для передвижения. В частности, для перемещения состава и его торможения в транспорте с магнитной левитацией используется синхронный линейный двигатель, работающий как вращающийся электродвигатель, в котором статор открыт и уложен вдоль направляющей. Ротор и статор создают не крутящий момент, а линейную силу. Эта сила создается при помощи набора магнитов или соленоидов, генерирующих скользящее магнитное поле, которое взаимодействует с электромагнитами, размещенными на направляющей. Магнитное поле, идущее от состава, индуцирует в электромагнитах направляющей электрический ток, приводящий к отталкиванию возбуждающего поля. Это создает силу, которая толкает состав в направлении, противоположном направлению скольжения магнитного поля.
Тот же самый принцип может использоваться для магнитного преобразования в электрическую энергию механической энергии, возникающей на основе эффекта буксирования воздушными змеями 2 модулей 5 ветровой системы 1. В частности, модули 5 ветровой системы 1 могут быть снабжены постоянными магнитами (которые, таким образом, не нуждаются в питании), возможно дополненными соленоидами из сверхпроводника (которые требуют относительно мало энергии), а на направляющей 6 можно разместить металлические обмотки, которые работают как электромагниты. Эти обмотки можно установить подходящим образом, чтобы при поступательном перемещении модулей 5 по направляющей 6 постоянные магниты индуцировали электрические токи в данных электромагнитах. Такие индуцированные токи частично создают магнитное поле, которое противоположно индуцирующему полю, определяя левитацию модулей 5, а частично являются результатом преобразования механической энергии в электрическую энергию. В частности, модульная конструкция постоянных магнитов и соответствующего магнитопровода, обращенных друг к другу и расположенных на направляющей 6 и модулях 5, приводит к непрерывному изменению индуцированного потока во время относительного поступательного перемещения модулей 5 по направляющей 6. Эти изменения потока в магнитопроводах выгодным образом сочетают с обмотками для накопления электрической энергии. Эти обмотки могут быть соединены с силовой электроникой, которая изменяет их поглощение контролируемым и быстрым образом. При этом система становится исполнительным механизмом, который может оказывать влияние, модулируя силы в динамике переходных процессов. Эта особенность позволяет реализовать виртуальный демпфер, который может поглощать возможные излишки энергии отклонений или колебаний подвижных контактов, снабженных постоянными магнитами, в направлении, перпендикулярном плоскости воздушного зазора.
Постоянные магниты, которыми должны быть снабжены модули 5, могут представлять собой, например, магниты из неодима - железа - бора. Эти магниты являются наиболее подходящим кандидатом для получения достаточно широкого воздушного зазора и интенсивных магнитных потоков. Максимальная емкость подвижных контактов, снабженных постоянными магнитами, является функцией от площади лицевой поверхности, при этом используются преимущества магнитного отталкивания, которое изменяется с квадратом расстояния.
Подводя итог, можно сказать, что использование магнитной левитации с постоянными магнитами позволяет объединить три функции в одной подсистеме: подвешивание модулей 5 с низким трением (в результате скольжение модулей 5 является чрезвычайно эффективным и может происходить без износа элементов), генерацию электрической энергии (которая происходит непосредственно в направляющей 6) и поглощение энергии возможных колебаний и отклонений подвижных контактов, снабженных постоянными магнитами, под действием тянущего усилия модулей 5 (и, таким образом, находящейся в натянутом состоянии гибкой конструкции 12).
Чтобы предотвратить риски смещения подвижных контактов, снабженных постоянными магнитами, опорное соединение имеет две степени свободы, как подвижное соединение шарового типа, и прикладывает толкающее усилие в области центра тяжести подвижного контакта. При этом передаются только воздействия в направлении скольжения, то есть действующие в поперечном направлении к плоскости воздушного зазора, а также действующие в плоскости воздушного зазора или перпендикулярно этой плоскости.
Что касается преобразования энергии, имеется четыре схемы, которые можно применить для ветровой системы 1, предлагаемой настоящим изобретением:
- модули 5 ветровой системы 1 движутся по классическим основным направляющим 6 при помощи колес 16 и 17, вращение которых непосредственно приводит в действие генераторы 20 для создания электрического тока. Колеса 16, соединенные с генераторами 20, это колеса, несущие вес модуля 5. Такая схема может применяться, только если трение качения этих колес 16 является достаточным для приведения в действие генераторов 20;
- модули 5 ветровой системы 1 движутся по классическим основным направляющим 6 при помощи колес 16 и 17, но создание электрического тока происходит, главным образом, за счет приведения в действие генераторов 21, соединенных с зубчатыми колесами 18, катящимися, по меньшей мере, по одной зубчатой рейке 15. Даже если в этой схеме функцию опоры выполняют, главным образом, гладкие колеса 16, они все равно соединены с двигателями 11, которые, как рассмотрено ниже, приводятся в действие при включении ветровой системы 1 для начала работы модулей 5. Эти двигатели 11 могут использоваться как генераторы при работе ветровой системы 1, используя трение качения между гладкими колесами 16 и классической направляющей 6;
- модули 5 ветровой системы 1 движутся по направляющим 6, которые представляют собой комбинацию классической направляющей и магнитной направляющей, при помощи колес 16 и 17, которые выполняют исключительно функцию опоры. Создание электрического тока происходит за счет использования реверсивных магнитных линейных двигателей, в результате чего они работают как генераторы;
- модули 5 ветровой системы 1 движутся по направляющим 6, которые представляют собой комбинацию классической направляющей и магнитной направляющей, при помощи магнитной левитации. Модули 5 также снабжены колесами 16, которые обеспечивают поддержание воздушного зазора. Создание электрического тока происходит за счет использования реверсивных магнитных линейных двигателей, в результате чего они работают как генераторы.
Из четырех описанных выше схем схемы, предусматривающие использование реверсивных магнитных линейных двигателей, являются схемами, которые обеспечивают поставку электрической мощности более высоких уровней.
Устройства, служащие для генерации электричества, являются ли они вращающимися генераторами/двигателями 20 или реверсивными линейными двигателями, используются как двигатели при включении ветровой системы 1, чтобы привести в движение модули 5 и создать легкий бриз у конца систем 8 возврата в исходное положение с целью способствовать набору высоты воздушными змеями 1. Если модули 5 ветровой системы 1 не соединены между собой посредством находящейся в натянутом состоянии гибкой конструкции 12, другой ситуацией, в которой генераторы 20 используются как двигатели, является пропадание эффекта буксирования воздушными змеями 2 во время работы ветровой системы 1. В этом случае модуль 5 ветровой системы 1 сначала продолжает двигаться по инерции. Если интеллектуальная система управления не задействуется, чтобы за короткое время восстановить эффект буксирования, приводят в действие генераторы 20, чтобы они работали как двигатели, и модуль 5 продолжает двигаться вперед, не вынуждая следующий модуль 5 замедлить свое собственное движение.
Интеллектуальная система управления представляет собой систему, при помощи которой происходит автоматическое управление воздушными змеями 2. Основная задача этого компонента состоит в управлении работой двигателей 28 и 29, соединенных с лебедками 24 и 25 систем 22 наматывания/разматывания и систем 23 хранения тросов 4, а также в управлении системой, предназначенной для управления концевой частью 10 систем 8 возврата в исходное положение воздушных змеев 2, которая выполнена с возможностью ее ориентирования. Очевидно, что каждой цепочкой 3 воздушных змеев 2 управляют независимо от других цепочек, что позволяет избежать возникновения взаимных помех при полете.
Интеллектуальная система управления ветровой системы 1, соответствующей настоящему изобретению, в предпочтительном случае может быть подобна той, которая описана в упомянутой ранее заявке на патент Италии № ТО2006А000491, к которой необходимо обратиться за более подробным объяснением.
Если говорить в общем, основными функциями, выполняемыми интеллектуальной системой управления, являются следующие:
- автоматическое управление полетом воздушных змеев 2;
- самокалибровка датчиков как оборудования воздушных змеев 2;
- предотвращение столкновений между воздушными змеями 2 и другими летающими объектами;
- приведение в действие модулей 26 управления тросами 4 или двигателей для поступательного перемещения лебедок 25 системы 23 хранения;
- приведение в действие двигателей;
- компенсирование изменений нагрузки на тросы 4.
Система питания содержит все необходимые компоненты для накопления и поставки электрической энергии. В частности, ветровая система 1 снабжена источниками питания, трансформаторами и аккумуляторами, при помощи которых хранится произведенное электричество и подается электрический ток к двигателям во время фазы включения модулей 5 ветровой системы 1, а также для возврата воздушных змеев 2 в исходное положение, питания всех электронных компонентов и предоставления электрической мощности всем внешним пользователям. Даже если работой всех электронных компонентов ветровой системы 1 управляет интеллектуальная система управления.
Кроме того, настоящее изобретение относится к способу производства электрической энергии при помощи ветровой системы 1, которая описана ранее.
В общем, способ, предлагаемый настоящим изобретением, который представляет собой способ преобразования энергии ветра в электрическую энергию, реализуемый при помощи ветровой системы 1, предлагаемой настоящим изобретением, содержит четыре этапа, которые циклически повторяются при работе этой ветровой системы.
Если рассматривать один модуль 5 ветровой системы 1 и гипотетически предположить, что направление, в котором дует ветер W, является постоянным, и что направляющие 6 и 7 образуют кольцевой контур, то во время первых трех этапов способа, соответствующего настоящему изобретению, поступательное перемещение модуля 5 происходит благодаря энергии, извлеченной из ветра W при помощи цепочки 3 воздушных змеев 2, соединенной с этим модулем 5. Поэтому интеллектуальная система управления управляет цепочкой 3 воздушных змеев 2 таким образом, чтобы энергия, которую можно извлечь из ветра, была максимальной, одновременно с необходимостью удерживать тросы 4 по возможности на касательной по отношению к направляющей 6 в течение всего этапа. По сути, чем ближе положение тросов 4 к касательной относительно направляющей 6, тем больше полезный компонент силы тяги при работе с модулем 5. Тот факт, что тросы 4 удерживают на касательной по отношению к направляющей 6, подразумевает, что система управления управляет цепочкой 3 воздушных змеев 2 таким образом, чтобы использовать, главным образом, подъемную силу, а именно, компонент силы, перпендикулярный скорости ветра. При этом воздушные змеи 2 движутся, продолжая периодически изменять площадь ветрового фронта. Тогда ветер продвигает воздушные змеи 2, натягивая тросы 4, соединенные с модулями 5 ветровой системы 1 - этот эффект буксирования определяет работу с модулями 5 и производство электрической энергии при помощи генераторов 20 и/или 21 либо реверсивных магнитных линейных двигателей.
Четвертый и последний этап способа, соответствующего настоящему изобретению, наоборот, происходит в подветренной области. Интеллектуальная система управления управляет цепочкой 3 воздушных змеев 2 таким образом, чтобы быстро пересечь эту область без создания какого-либо эффекта торможения модуля 5 ветровой системы 1. В частности, помимо того, что интеллектуальная система управления управляет цепочкой 3 воздушных змеев 2 таким образом, чтобы они следовали за поступательным перемещением модуля 5, по-прежнему присутствует эффект буксирования со стороны воздушных змеев 2 (даже если он имеет низкую эффективность). Если модули 5 ветровой системы 1 соединены между собой посредством системы растяжек 14, то модули 5, для которых по-прежнему присутствует эффект буксирования, вносят свой вклад в продвижение модуля 5 на этом этапе рабочего цикла. Если же модули 5 не соединены между собой посредством системы растяжек 14, во время выполнения этого этапа продвижение рассматриваемого модуля 5 осуществляется, прежде всего, за счет инерции.
Если обратиться к Фиг.21, на которой показана возможная траектория, описываемая воздушным змеем 2 во время одного цикла способа, соответствующего настоящему изобретению, и предположить, что направление W скорости ветра и направление поступательного перемещения модулей 5, обозначенное стрелкой R, сохраняются постоянными, то для одного модуля 5 ветровой системы 1 четыре этапа, составляющие упомянутый способ, соответствующий настоящему изобретению, которые, соответственно, обозначены заштрихованными прямоугольниками a, b, c и d, ограничивающими разные пространственные области, в которых находится воздушный змей 2 в зависимости от направления W струй ветра, представляют собой следующее:
а - во время этого этапа воздушный змей 2 перемещается в поперечном направлении относительно направления ветра W (прямоугольник а на Фиг.21). В результате ветер дует в поперечном направлении относительно направления продвижения воздушного змея 2. Длина размотанных секций троса 4 увеличивается, так как воздушные змеи 2 удаляются от модуля 5 ветровой системы 1. В заключение можно сказать, что этот этап выполняется аналогично тому, как описано в упомянутой ранее заявке на патент Италии № ТО2006А000491, к которой можно обратиться за дополнительными объяснениями;
b - во время этого этапа воздушный змей 2 перемещается в том же направлении W, в котором дует ветер (прямоугольник b на Фиг.21). На этом этапе к сопротивлению воздушного змея добавляется использование подъема воздушного змея 2. Это приводит к тому, что скорость воздушного змея 2 становится выше скорости W ветра, для использования эффекта буксирования необходимо частично смотать тросы 4. Несмотря на такое убирание тросов даже на этом этапе баланс энергии является положительным. В заключение можно сказать, что для этого этапа также действуют положения, указанные в упомянутой ранее заявке на патент Италии № ТО2006А000491, к которой можно обратиться за дополнительными объяснениями;
с - аналогично тому, что происходит на указанном выше первом этапе а с поперечным ветром, на данном этапе перемещение воздушного змея 2 становится поперечным относительно направления W ветра (прямоугольник с на Фиг.21), и длина размотанных секций троса 4 увеличивается, так как воздушные змеи 2 удаляются от модуля 5 ветровой системы 1. В заключение можно сказать, что для этого этапа также действуют положения, указанные в упомянутой ранее заявке на патент Италии № ТО2006А000491, к которой можно обратиться за дополнительными объяснениями;
d - во время данного этапа воздушный змей 2 перемещается в направлении, противоположном направлению ветра (прямоугольник d на Фиг.21). Интеллектуальная система управления управляет воздушным змеем 2 так, чтобы не создавать какого-либо эффекта торможения, так как он выполняет резкий маневр, называемый "поворот фордевинд", состоящий в быстром переходе между двумя поперечными направлениями, во время которого воздушный змей 2 проходит в воздухе расстояние, равное, по меньшей мере, трем длинам той дуги окружности, которую при этом проходит модуль 5 ветровой системы 1. Воздушный змей 2 теряет высоту, при этом не противодействуя каким-либо образом поступательному перемещению модуля 5. На этом этапе необходимо за относительно короткое время убрать большую часть размотанного троса 4. В конце поворота фордевинд воздушный змей 2 располагают таким образом, чтобы он захватывался ветром W и перемещался в поперечном направлении относительно этого ветра. Для этого этапа также действуют положения, указанные в упомянутой ранее заявке на патент Италии № ТО2006А000491, к которой можно обратиться за дополнительными объяснениями; и
е - циклически повторяют предыдущие этапы для каждого полного оборота, совершаемого модулем 5 при перемещении вдоль направляющей 6.
Однако, как можно увидеть, в противоположность изложенному в заявке на патент Италии № ТО2006А000491 для ветровой системы с рычагами и вращающимся валом, содержащей системы накопления энергии, с использованием которых увеличивают или уменьшают длину размотанных секций троса 4 без вращения лебедок 24 и 25 системы 22 наматывания/разматывания и систем 23 хранения тросов 4, в ветровой системе 1, соответствующей настоящему изобретению, регулирование размотанных секций троса 4 происходит при помощи упомянутых лебедок 24 и 25. Во время всего рабочего цикла воздушными змеями 2 управляют таким образом, чтобы происходило чередование набора и потери высоты. Этот подход продиктован, во-первых, технической необходимостью, так как модули 5 ветровой системы 1 поступательно перемещаются медленнее воздушных змеев 2. Во-вторых, ситуация постоянного чередования набора и потери высоты также чрезвычайно выгодна с точки зрения оптимизации количества энергии, которое может быть извлечено из ветра. По сути, при периодическом изменении площади ветрового фронта увеличивается мощность, которую способны выработать воздушные змеи 2.
Помимо этого, по сравнению с ветровой системой с рычагами и вращающимся валом, предлагаемой в заявке на патент Италии № ТО2006А000491, ветровая система 1, соответствующая настоящему изобретению, улучшена в следующих аспектах:
- в то время как ветровая система с рычагами и вращающимся валом характеризуется наличием центральной направляющей и производство электрической энергии происходит за счет использования крутящего момента, создаваемого на рычагах турбины воздушными змеями, ветровая система, предлагаемая настоящим изобретением, характеризуется наличием контура кольцевого типа, по меньшей мере, с одним модулем, который поступательно перемещается, по меньшей мере, по одной направляющей, и преобразование энергии происходит за счет использования буксирования модулей воздушными змеями;
- в то время как в ветровой системе с рычагами и вращающимся валом управление воздушными змеями происходит исключительно при помощи тросов, в ветровой системе, предлагаемой настоящим изобретением, управление воздушными змеями может выполняться также при помощи интерцепторов или направленных боковых выступов, размещенных на борту тех же воздушных змеев. В частности, управление происходит путем создания, при помощи интерцепторов, турбулентности, которая приводит к возникновению градиентов давления. Этот режим управления комбинируется с режимом, предоставляемым ветровой системой с рычагами и вращающимся валом, либо заменяет его;
- в то время как в ветровой системе с рычагами и вращающимся валом компоненты, предусмотренные для хранения тросов и управления воздушным змеем, находятся в центре турбины (и, следовательно, на значительном удалении от места, из которого тросы идут от земли к воздушным змеям), в ветровой системе, предлагаемой настоящим изобретением, системы хранения тросов находятся на борту каждого модуля рядом с системами возврата воздушных змеев в исходное положение. Отсутствие рычагов приводит к такой конструкции ветровой системы, предлагаемой настоящим изобретением, благодаря которой можно генерировать мощность значительно большего порядка по величине (например, 1 ГВт) по сравнению с мощностью, которая может быть получена ветровой системой с рычагами и вращающимся валом. По сути, удаление рычагов снижает инерционность ветровой системы и позволяет увеличить длину траектории, описываемой модулями и, как следствие, при том же расстоянии между двумя модулями увеличить число модулей, которыми снабжена ветровая система;
- в то время как в ветровой системе с рычагами и вращающимся валом трубы, предназначенные для возврата в исходное положение, являются стационарными, в ветровой системе, предлагаемой настоящим изобретением, концевую часть систем возврата воздушных змеев в исходное положение можно ориентировать с возможностью поворота как в горизонтальной, так и в вертикальной плоскости. Это облегчает операции возврата в исходное положение и взлета воздушных змеев.
В качестве дополнительного доказательства высокой эффективности, демонстрируемой ветровой системой и способом, соответствующими настоящему изобретению, можно представить некоторые соображения, касающиеся мощности, которую один воздушный змей 2 способен извлечь из ветра.
С этой целью, как в частности показано на Фиг.22, имеет смысл, во-первых, подчеркнуть аэродинамику системы. Известно, что при встрече струи ветра с неподвижным аэродинамическим профилем AS эта струя создает две силы: силу D сопротивления, параллельную направлению W, в котором дует ветер, и подъемную силу L, перпендикулярную этому направлению W. В случае ламинарности потока ветра, струи AF1 ветра, проходящие выше аэродинамического профиля AS, быстрее струй AF2 ветра, проходящих ниже нее, так как они должны перемещаться на большее расстояние. Это приводит к снижению давления в верхней части воздушного змея и, таким образом, появлению градиента давлений, который вызывает появление подъемной силы L.
В качестве альтернативы, как показано на Фиг.23, предположим, что воздушный змей АМ может двигаться в направлении DT подъемной силы. В результате этого движения нижняя поверхность аэродинамического профиля АМ наклоняется относительно скорости ветра. В этом случае, соответственно, подъемная сила перпендикулярна, а сила сопротивления параллельна скорости ветра относительно воздушного змея.
Если обозначить S1 силу, параллельную направлению движения, и S2 силу, перпендикулярную этому направлению, то компонент подъемной силы L, параллельный направлению движения, имеет тот же знак, что и поступательное перемещение аэродинамического профиля АМ, а параллельный компонент силы D сопротивления имеет противоположный знак.
По этой причине, для сохранения движения в направлении, перпендикулярном струям ветра, имеет смысл наклонить воздушный змей АМ, чтобы получить высокое значение для отношения компонента подъемной силы L, совпадающего с направлением DT движения воздушного змея АМ, к компоненту силы D сопротивления.
Эти соображения также достоверны для каждого отдельного воздушного змея 2 ветровой системы 1.
По сути, интеллектуальная система управления управляет каждым воздушным змеем 2 таким образом, чтобы сохранить высокое значение отношения подъемной силы к силе сопротивления на этапах, характеризующихся высокой степенью эффекта буксирования воздушными змеями 2. При этом воздушные змеи 2 совершают колебания, периодически изменяя площадь ветрового фронта, и генерация мощности происходит за счет тянущего усилия тросов 4.
Мощность, создаваемую одним воздушным змеем 2 рассчитывают, умножая удельную мощность ветра на площадь А ветрового фронта, перехваченную воздушным змеем (то есть площадь воздушного змея) и на коэффициент KPF мощности для воздушного змея, являющийся коэффициентом полезного действия, зависящим от отношения Vk/Vw между скоростью Vk воздушного змея и скоростью Vw ветра, а также от двух коэффициентов Kd и Kl.
Коэффициент Kd относится к буксированию, то есть когда воздушный змей тянет связанное с ним наземное оборудование с соответствующими силами и скоростями в направлении ветра, в то время как коэффициент Kl относится к подъему, то есть, когда воздушный змей тянет связанное с ним наземное оборудование, совершая колебания, чтобы периодически изменять площадь ветрового фронта. Из-за подъема скорость воздушного змея значительно выше скорости ветра. Мощность воздушного змея тем выше, чем больше подъем превышает сопротивление.
В качестве примера предположим, что Vk/Vw=10, Kl=1,2 и Kd=0,1. В этом случае получим KPF=20.
Если предположить, что плотность ρ воздуха постоянна и равна 1,225 кг/м3, удельная мощность, создаваемая ветром, будет равна:

Мощность, которая может быть создана при помощи воздушного змея, выражается следующей формулой:

Например, если использовался воздушный змей с поверхностью 18 м2, толкаемый со скоростью 60 м/с ветром, дующим со скоростью 6 м/с, мощность, которую можно создать на уровне троса, будет 47628 Вт. Эта мощность, таким образом, будет соответствовать максимальной мощности, которую способен создать воздушный змей 2.
Значение, принимаемое KPF, в любом случае зависит от эффективности воздушного змея 2. Можно сделать так, чтоб KPF принимал значения, превышающие 20. Например, если KPF принимает значение, равное 40, максимальная мощность, которая может быть получена от воздушного змея 2 с площадью 18 м2, будет составлять 95256 Вт.
Реферат
Изобретение относится к ветровой системе для преобразования энергии за счет поступательного перемещения по направляющей модулей, буксируемых воздушными змеями, и способам ее работы. Ветровая система для преобразования энергии содержит, по меньшей мере, один воздушный змей и, по меньшей мере, один модуль. Воздушный змей погружен в струю ветра, а указанный модуль выполнен с возможностью поступательного перемещения по размещенной у земли направляющей. Модуль соединен посредством, по меньшей мере, одного троса с воздушным змеем, чтобы буксировать модуль по направляющей и выполнять преобразование энергии ветра в электрическую энергию. Трос выполнен с возможностью как передавать механическую энергию от воздушного змея и к этому змею, так и управлять траекторией полета воздушного змея. Энергию преобразуют при помощи системы генерации электрической энергии, работающей совместно с модулем и направляющей. Изобретение позволяет повысить эффективность преобразования ветровой энергии. 3 н. и 47 з.п. ф-лы, 23 ил.
Формула
- по меньшей мере, один воздушный змей (2), выполненный с возможностью управления им с земли, который погружен, по меньшей мере, в одну струю (W) ветра;
- по меньшей мере, один модуль (5), выполненный с возможностью поступательного перемещения, по меньшей мере, по одной направляющей (6, 7), размещенной у земли, причем упомянутый модуль (5) соединен посредством, по меньшей мере, одного троса (4) с воздушным змеем (2); воздушный змей (2) выполнен с возможностью управления им при помощи упомянутого модуля (5), с целью буксирования этого модуля (5) по направляющей (6, 7) и выполнения преобразования энергии ветра в электрическую энергию при помощи, по меньшей мере, одной системы генерации, работающей совместно с упомянутыми модулем (5) и направляющей (6, 7); и трос (4) выполнен с возможностью как передачи механической энергии от воздушного змея (2) и к этому змею (2), так и управления траекторией полета упомянутого воздушного змея (2),
отличающаяся тем, что система генерации содержит, по меньшей мере, один генератор/двигатель (20), выполненный с возможностью преобразовывать энергию ветра в электрическую энергию при помощи движения модуля (5) относительно направляющей (6, 7).
- управляют траекторией полета воздушного змея (2) таким образом, чтобы этот воздушный змей (2) двигался в поперечном направлении относительно направления струи (W) ветра, при этом воздушный змей (2) натягивает тросы (4), соединенные с модулем (5) ветровой системы (1), заставляют этот модуль (5) поступательно перемещаться по направляющим (6) благодаря эффекту буксирования, и удаляют воздушный змей (2) на расстояние от модуля (5) за счет разматывания тросов (4) посредством первых лебедок (24), приводимых в действие при помощи первых электродвигателей (28);
- управляют траекторией полета воздушного змея (2) таким образом, чтобы этот воздушный змей (2) двигался в направлении, совпадающем с направлением струи (W) ветра, при этом воздушный змей (2) натягивает тросы (4), соединенные с модулем (5) ветровой системы (1), заставляют этот модуль (5) поступательно перемещаться по направляющим (6) благодаря эффекту буксирования, и приближают воздушный змей (2) к модулю (5) за счет повторного наматывания тросов (4) посредством первых лебедок (24), приводимых в действие при помощи первых электродвигателей (28);
- управляют траекторией полета воздушного змея (2) таким образом, чтобы этот воздушный змей (2) двигался в поперечном направлении относительно направления струи (W) ветра, при этом воздушный змей (2) натягивает тросы (4), соединенные с модулем (5) ветровой системы (1), заставляют этот модуль (5) двигаться по направляющим (6) благодаря эффекту буксирования, и удаляют воздушный змей (2) на расстояние от модуля (5) за счет разматывания тросов (4) посредством первых лебедок (24), приводимых в действие при помощи первых электродвигателей (28);
- управляют траекторией полета воздушного змея (2) таким образом, чтобы этот воздушный змей (2) двигался в направлении, противоположном направлению струи (W) ветра, без создания какого-либо эффекта торможения для поступательного перемещения модуля (5) ветровой системы (1), за счет повторного наматывания тросов (4) посредством первых лебедок (24), приводимых в действие при помощи первых электродвигателей (28); и
- повторяют предыдущие этапы,
причем каждый из упомянутых этапов или последовательность этих этапов в предпочтительном случае выполняют автоматически при помощи интеллектуальной системы управления.
Комментарии