Ветровая система для преобразования энергии посредством перемещения на рельсе модулей, буксируемых кайтами, и процесс для выработки электрической энергии посредством такой системы - RU2615549C2
Код документа: RU2615549C2
Чертежи
Описание
Настоящее изобретение относится к ветровой системе для преобразования энергии посредством перемещения на рельсе модулей, буксируемых посредством кайтов. Настоящее изобретение также относится к способу выработки электроэнергии посредством такой системы.
Ранее уже предлагались решения проблемы выработки электроэнергии с малыми затратами посредством использования возобновляемых источников энергии; в частности, в некоторых более ранних патентах, упомянутых ниже, были предложены способы преобразования энергии ветра совместно с некоторыми устройствами, которые извлекают энергию ветра посредством мощных крыловидных профилей (обычно называемых термином «кайт»).
В частности, US 4124182 раскрывает устройство с «паракайтами» (или «модифицированными парашютами») для улавливания энергии ветра и преобразования ее во вращательное движение вала, которое приводит в действие генератор. Данное устройство отличается парой «цепочек паракайтов», в которых кайты расположены последовательно. Каждая цепочка снабжена силовым канатом. Такие тросы достаточно длинные, чтобы позволять цепочкам паракайтов достигать высот, на которых дуют более сильные и более постоянные ветра относительно ветров, которые дуют на уровне поверхности земли. Каждая цепочка посредством соответствующего силового каната связана с барабаном или лебедкой, направление вращения которой может изменяться так, что она сматывает канаты или позволяет канатам разматываться вследствие силы тяги ветрового течения. Каждая цепочка паракайтов снабжена вторым канатом, так называемого «колпакового типа», соединенным с каждым кайтом цепочки и посредством которого можно селективно сплющивать паракайты, чтобы облегчить процедуру сматывания. Через редуктор вращательное движение каждой лебедки передается генератору, который при приведении в действие вырабатывает электроэнергию. Предусмотрена одна система шкивов, которая, посредством муфт и зубчатых колес, обеспечивает восстановление одной цепочки паракайтов, в то время как другая цепочка поднимается. Таким образом, улавливаемая энергия ветра преобразуется в механическую энергию, которая частично сразу расходуется на восстановление цепочки паракайтов, колпак которых закрыт, и частично преобразуется в электроэнергию. Посредством аэростата, привязанного к каждой цепочке и надуваемого и сдуваемого после каждого рабочего цикла, паракайт удерживается на требуемой высоте, и колпаки имеют фиксированную ориентацию.
Патент Китая CN 1052723 раскрывает ветровой генератор тока с парой кайтов, посредством которых тяга, вызываемая ветровыми течениями, преобразуется, через канаты высокого сопротивления, во вращение барабана, размещенного на уровне земли. Лебедка приводит в действие гидравлический двигатель, посредством которого осуществляется генерирование тока.
Патент Великобритании GB 2317422 раскрывает устройство с множеством кайтов, которые, благодаря воздействию ветра, вращают вертикальный вал, соединенный с генератором для генерирования тока. Под действием ветра кайты продвигаются по круговой траектории в горизонтальной плоскости. Каждый кайт снабжен устройством, способным изменять угол атаки ветра, чтобы обеспечивать непрерывность полета.
Патент США US 6072245 раскрывает устройство для использования энергии ветра, состоящее из множества кайтов, соединенных с канатами, образуя кольцо. Кайты приводятся в движение, чтобы чередовать восходящую траекторию с нисходящей траекторией, определяя вращательное движение кольца всегда в одном и том же направлении. Каждый кайт подсоединен к силовому канату для передачи механической энергии и к системе приводных канатов для регулирования угла атаки ветра каждого кайта. Силовой канат определяет вращение шкивов, посредством которого осуществляется выработка электроэнергии. Приводные канаты используются для того, чтобы вынуждать каждый кайт принимать положение, которое, на восходящей траектории, обеспечивает выталкивание кайта вверх под действием ветра, и второе положение на нисходящей траектории, для того чтобы кайт подвергался воздействию меньшего напора ветра.
Патент США US 6254034 раскрывает устройство с кайтом («привязанным воздушным летательным аппаратом»), продвигаемым посредством ветровых течений на регулируемой высоте, чтобы использовать энергию ветра. Кайт соединен посредством каната с лебедкой, которая приводит в действие генератор для выработки электроэнергии. На борту кайта установлена система привода, которая определяет и изменяет угол атаки ветра и изменяет перехватываемую площадь фронта ветра. Управление такой системой осуществляется с земли посредством оператора, который считывает на дисплее данные, передаваемые соответствующими датчиками, или автоматически через систему дистанционного управления. Кайт приводится в движение так, чтобы подниматься по ветру с большим углом атаки. После завершения подъема угол атаки уменьшают, и кайт планирует, чтобы перемещаться против ветра. Кайт восстанавливается, опять планирует по ветру и цикл повторяется.
Патент США US 6523781 раскрывает устройство, состоящее из кайта («кайта с аэродинамическим профилем»), посредством которого улавливается энергия ветра, содержащего входной край, выходной край и два боковых края. Такой кайт приводится в движение посредством механизма, поддерживаемого самим кайтом. Данное устройство содержит канаты, соединенные с краями кайта, и кайт приводится в движение посредством изменения, при помощи данных канатов, угла тангажа. Приводной механизм снабжается электроэнергией посредством электрических кабелей, расположенных внутри силового каната, который соединяет кайт с лебедкой, которая приводит в действие генератор для выработки электроэнергии. Кайт поднимается, подталкиваемый ветром, используя подъемную силу и описывая траекторию, почти перпендикулярную направлению скорости ветра. После завершения подъема, кайт восстанавливается и затем приводится в движение, чтобы снова улавливать ветер.
Заявка на патент США US 2005046197 раскрывает устройство с кайтом для использования энергии ветра, которое вырабатывает электроэнергию при приведении в движение, посредством канатов, лебедки, соединенной с генератором. Кайт приводится в движение посредством дополнительных канатов, при помощи которых изменяют угол атаки ветра. Кайт поднимается с большим углом атаки. После завершения подъема угол атаки уменьшают до минимума, и кайт восстанавливается, чтобы снова начать цикл.
Во всяком случае, как можно отметить анализируя существующий уровень техники, известные ветровые системы с кайтами обычно имеют следующие общие характеристики:
- кайты снабжены как силовыми канатами, так и приводными канатами: это означает, что нагрузка каната, посредством которой осуществляется выработка электроэнергии, передается не на приводные механизмы кайтов, а на другие элементы ветровой системы, через канаты, соответственно используемые для выполнения данной функции. Неиспользование силовых канатов для приведения в движение кайтов делает конструкцию ветровой системы сложной со всеми сопутствующими недостатками;
- кайты приводятся в движение посредством механизмов, установленных непосредственно на кайтах, или посредством вспомогательных (приводных) канатов. Разматывание и сматывание этих канатов осуществляется посредством лебедок, используемых исключительно для данной цели, расположенных на уровне земли или подвешенных от земли (то есть поддерживаемых самими кайтами). В случае использования приводных канатов, размещение лебедок на уровне земли позволяет не расходовать часть энергии, извлекаемой из ветровых течений, для поддержки веса приводных механизмов;
- кайты приводятся в движение так, чтобы вырабатывать электроэнергию при подъеме посредством использования силы лобового сопротивления (то есть составляющей напора ветра, параллельной скорости ветра). За этим этапом следует восстановление кайтов посредством развертывания кайтов в виде флагов, для того чтобы минимизировать эффект торможения. В ограниченном количестве ветровых систем, было придумано использовать подъемную силу (то есть составляющую напора ветра, перпендикулярную скорости ветра) в дополнение к силе лобового сопротивления, чтобы заставить кайты подниматься. Преимущество, получаемое от использования этого последнего способа приведения в движение, относительно предыдущего способа состоит в том, что для выработки электроэнергии используется не только сопротивление кайта, но и подъемная сила кайта. Во всяком случае, в обоих способах, прерывистый рабочий цикл (этап подъема, сменяющийся этапом восстановления) подразумевает, что эффект буксировки кайтов, посредством которого осуществляется выработка электроэнергии, имеет место только во время половины траектории, описываемой кайтами (во время восстановления он по существу отсутствует);
- преобразование энергии осуществляется посредством передачи, через силовые канаты, вращения лебедок, соединенных с генераторами, возможно посредством промежуточных редукторов. Это не позволяет вырабатывать энергию непрерывно во время рабочего цикла, поскольку восстановление кайта осуществляется посредством приведения в действие лебедок при помощи двигателей. Таким образом, происходит прерывание выработки электроэнергии и расходование ранее выработанной энергии. Непрерывная выдача тока внешним пользователям возможна посредством использования аккумуляторов;
- внимание сосредоточено исключительно на выработке электроэнергии посредством циклического процесса. Выбор траектории, которую должны описывать кайты во время полета, чтобы максимизировать величину преобразованной энергии, практически совершенно не учитывается;
- проблемы, связанные с системой управления кайтом или группой, состоящей из множества кайтов, соединенных последовательно, рассматриваются подробно в очень ограниченном количестве проектов и научных исследований. Это объясняется также тем, что ведущиеся в настоящее время исследования сконцентрированы в основном на повышении производительности уже существующих систем, а не на разработке новых систем выработки энергии.
Для того чтобы частично решить упомянутые проблемы, европейская заявка за патент ЕР 1672 214 от имени компании Sequoia Automation S.r.l. раскрывает систему для преобразования кинетической энергии ветровых течений в электроэнергию посредством прогностического и адаптивного контроля полета кайтов, соединенных с «карусельной» системой, использующей турбину с вертикальной осью.
WO 2008/120257 данного заявителя настоящего изобретения решает упомянутые проблемы известного уровня техники посредством создания ветровой системы в соответствии с вводной частью пункта 1 формулы изобретения.
Задачей настоящего изобретения является решение упомянутых и других проблем известного уровня техники посредством создания ветровой системы для преобразования энергии посредством перемещения на рельсе модулей, буксируемых кайтами, которая усовершенствует упомянутую ветровую систему, раскрытую в WO 2008/120257, предусматривающую компоновку с магнитными полосами, которые обеспечивают как пассивную магнитную левитацию, так и генерирование электроэнергии для системы. Такая ветровая система находит полезное применение в глубоких морских применениях, содержащих плавучий рельс, на котором она работает.
Кроме того, данная ветровая система отличается от систем существующего уровня техники, в частности, способами приведения в движение кайтов, траекторией перемещения таких кайтов во время полета, для того чтобы максимизировать величину преобразуемой энергии, и структурой ветровой системы, в которой каждый модуль соединен посредством по меньшей мере одного каната с цепочкой кайтов, которая, продвигаемая ветром и соответственно приводимая в движение, создает на уровне модуля тягу, благодаря которой модуль перемещается на по меньшей мере одном рельсе, который образует замкнутую траекторию, и посредством генерирующей системы, взаимодействующей с модулем и рельсом, вырабатывает электроэнергию.
В данной ветровой системе кайты приводятся в действие посредством интеллектуальной системы управления, которая заставляет кайты во время полета совершать оптимальную траекторию, чтобы оптимизировать энергию ветра, которая может быть извлечена из ветра.
Кайты, образующие ветровую систему настоящего изобретения, приводятся в действие посредством тех же самых канатов, через которые энергия передается в модули ветровой системы.
В данной ветровой системе кайты приводятся в действие посредством интеллектуальной системы управления, которая приводит в действие двигатели, соединенные с лебедками, возможно через промежуточные редукторы, размещенными рядом с землей и объединенными с модулями ветровой системы, причем такие лебедки используются как для приведения в движение кайтов посредством разматывания и сматывания канатов, намотанных вокруг них, так и для поддержки нагрузки канатов для преобразования энергии.
В данной ветровой системе кайты приводятся в движение так, чтобы обеспечить преобразование энергии ветра посредством использования преимущественно подъемной силы и чтобы совершать траекторию, на протяжении которой эффект буксирования имеет место практически в течение всей продолжительности рабочего цикла.
В данной ветровой системе преобразование энергии осуществляется посредством генераторов, приводимых в действие не посредством вращения лебедок, а посредством перемещения модулей ветровой системы.
Данная ветровая система содержит кольцевую направляющую с по меньшей мере одним модулем, который перемещается на по меньшей мере одном рельсе, и которая преобразует энергию посредством использования перемещения модулей за счет эффекта буксирования посредством кайтов, соединенных с упомянутыми модулями.
Кайты, образующие упомянутую систему, могут также приводиться в движение посредством спойлеров, размещенных на борту упомянутых кайтов, создающих турбулентности, которые вызывают градиенты давления.
Элементы, предусмотренные для хранения канатов и приведения в движение цепочки кайтов, расположены на борту каждого модуля, рядом с системами восстановления кайтов.
Системы восстановления кайтов содержат концевую часть, приспособленную для ориентирования, с возможностью вращения как в горизонтальной, так и в вертикальной плоскостях.
Упомянутая и другие задачи и преимущества изобретения, которые станут очевидными из приведенного ниже описания, достигаются при использовании ветровой системы для преобразования энергии посредством перемещения на рельсе модулей, буксируемых посредством кайтов, по п.1 формулы изобретения.
Предпочтительные варианты осуществления и необычные модификации настоящего изобретения являются предметом зависимых пунктов формулы изобретения.
Настоящее изобретение будет описано более подробно посредством некоторых предпочтительных вариантов его осуществления, приведенных в качестве неограничивающего примера, со ссылкой на прилагаемые чертежи, из которых:
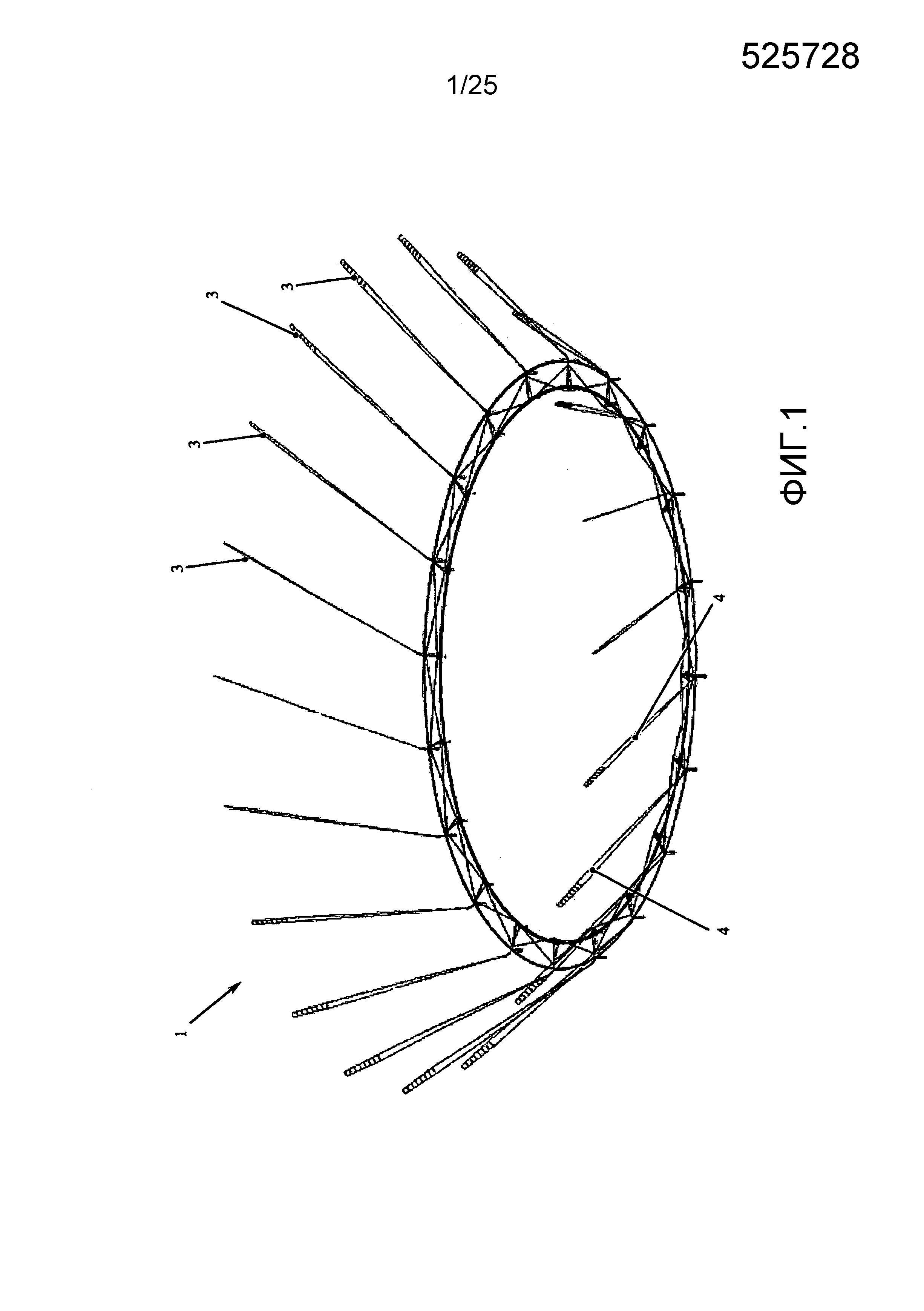
Фиг. 1 представляет собой общий вид предпочтительного варианта осуществления ветровой системы в соответствии с настоящим изобретением;
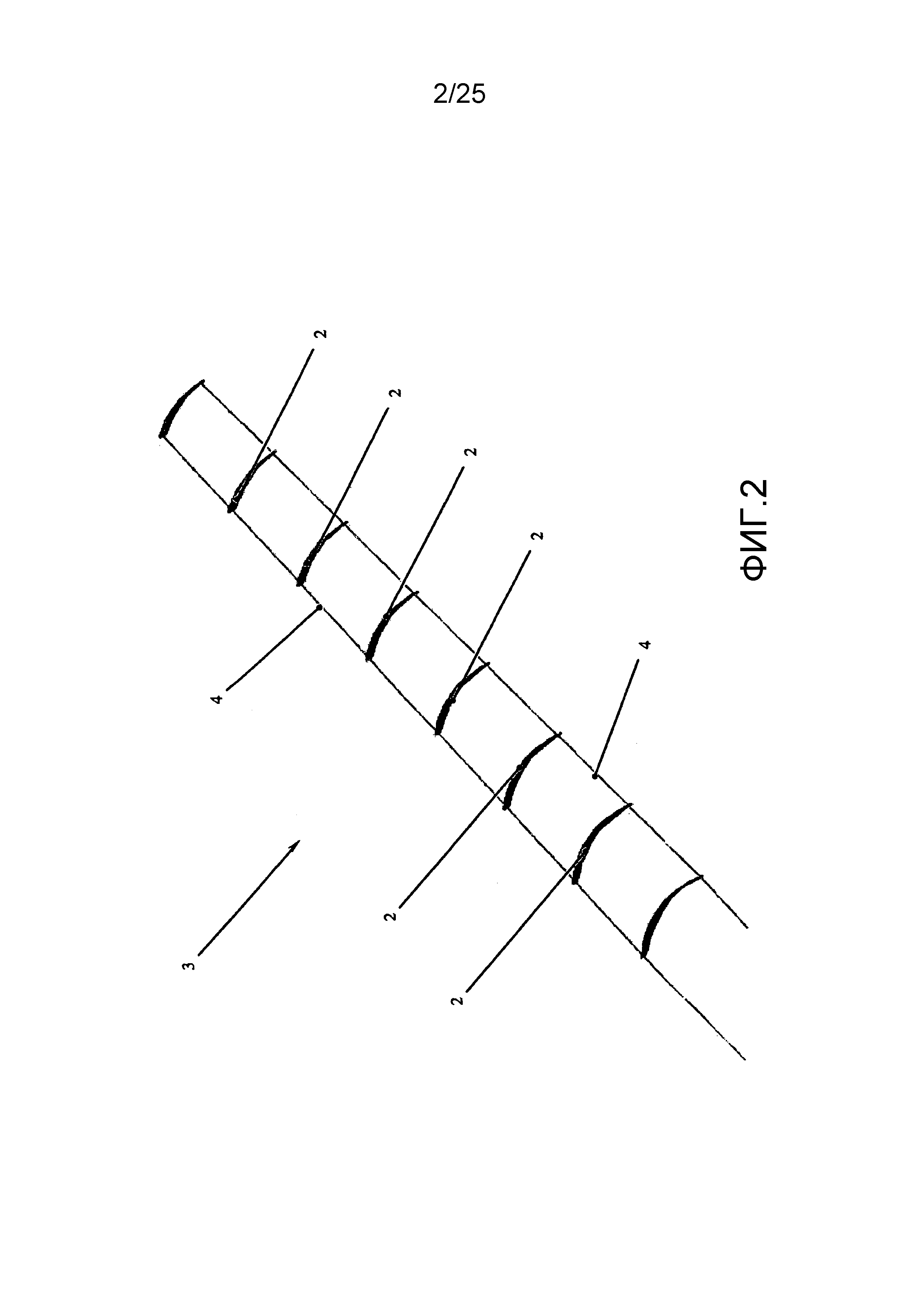
Фиг. 2 представляет собой увеличенный общий вид предпочтительного варианта осуществления элемента ветровой системы, показанной на фиг. 1;
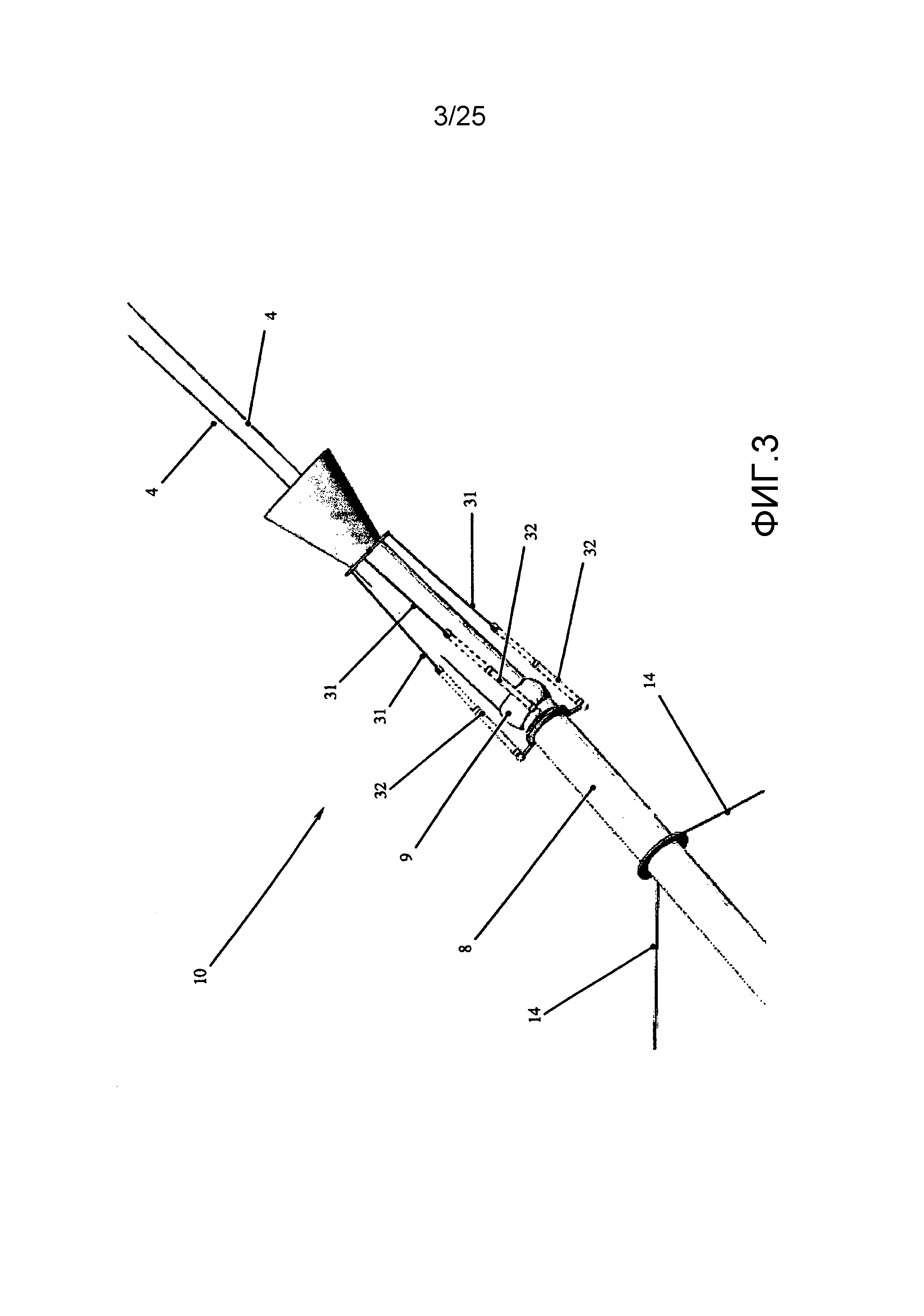
Фиг. 3 представляет собой увеличенный общий вид предпочтительного варианта осуществления другого элемента ветровой системы, показанной на фиг. 1;
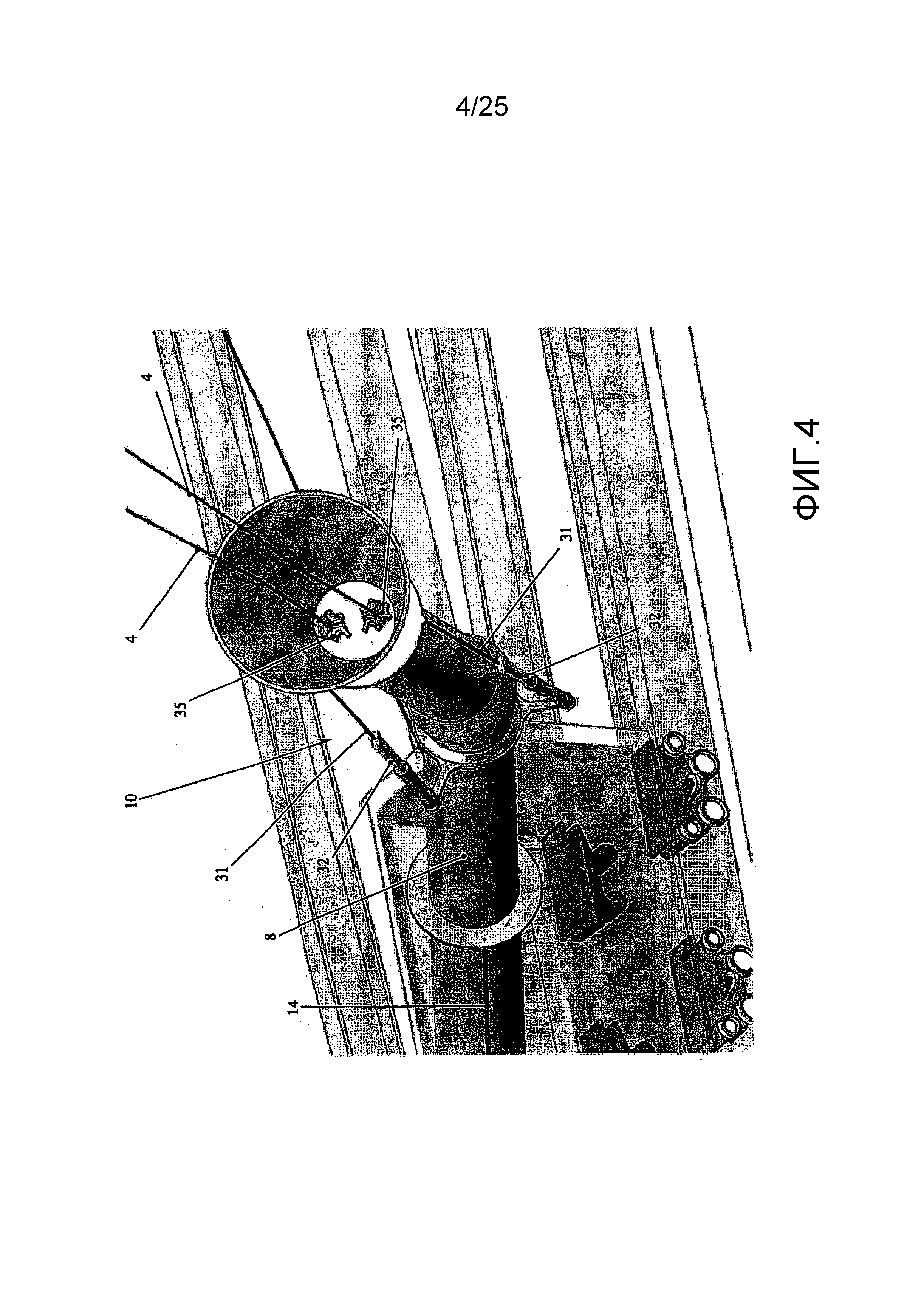
Фиг. 4 представляет собой другой общий вид элемента, показанного на фиг. 3;
Фиг. 5 представляет собой увеличенный общий вид ветровой системы, показанной на фиг. 1;
Фиг. 6 представляет собой другой увеличенный общий вид ветровой системы, показанной на фиг. 1;
Фиг. 7 представляет собой увеличенный общий вид предпочтительного варианта осуществления другого элемента ветровой системы, показанной на фиг. 1;
Фиг. 8 представляет собой увеличенный общий вид предпочтительного варианта осуществления другого элемента ветровой системы, показанной на фиг. 1;
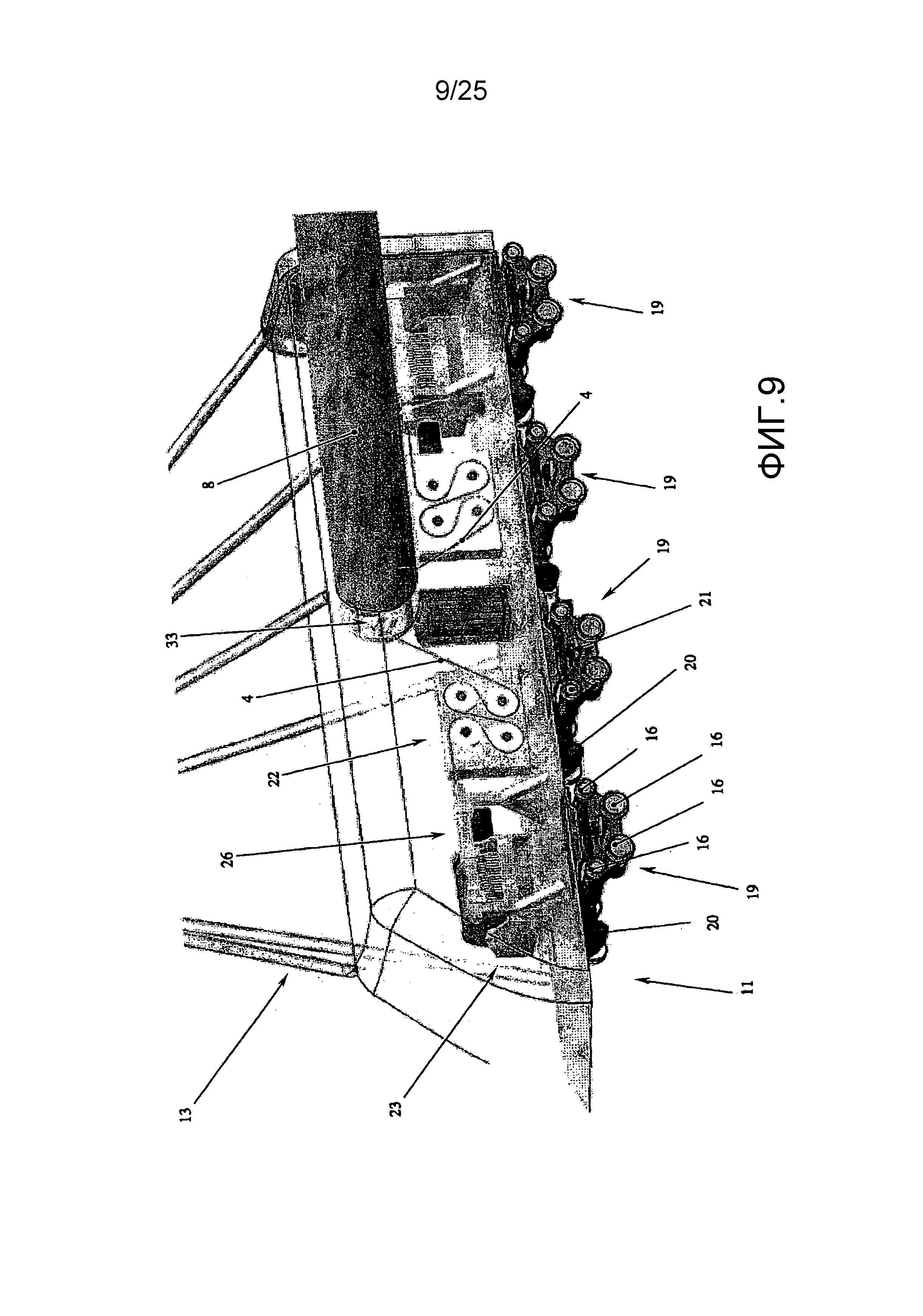
Фиг. 9 представляет собой увеличенный общий вид элемента, показанного на фиг. 8;
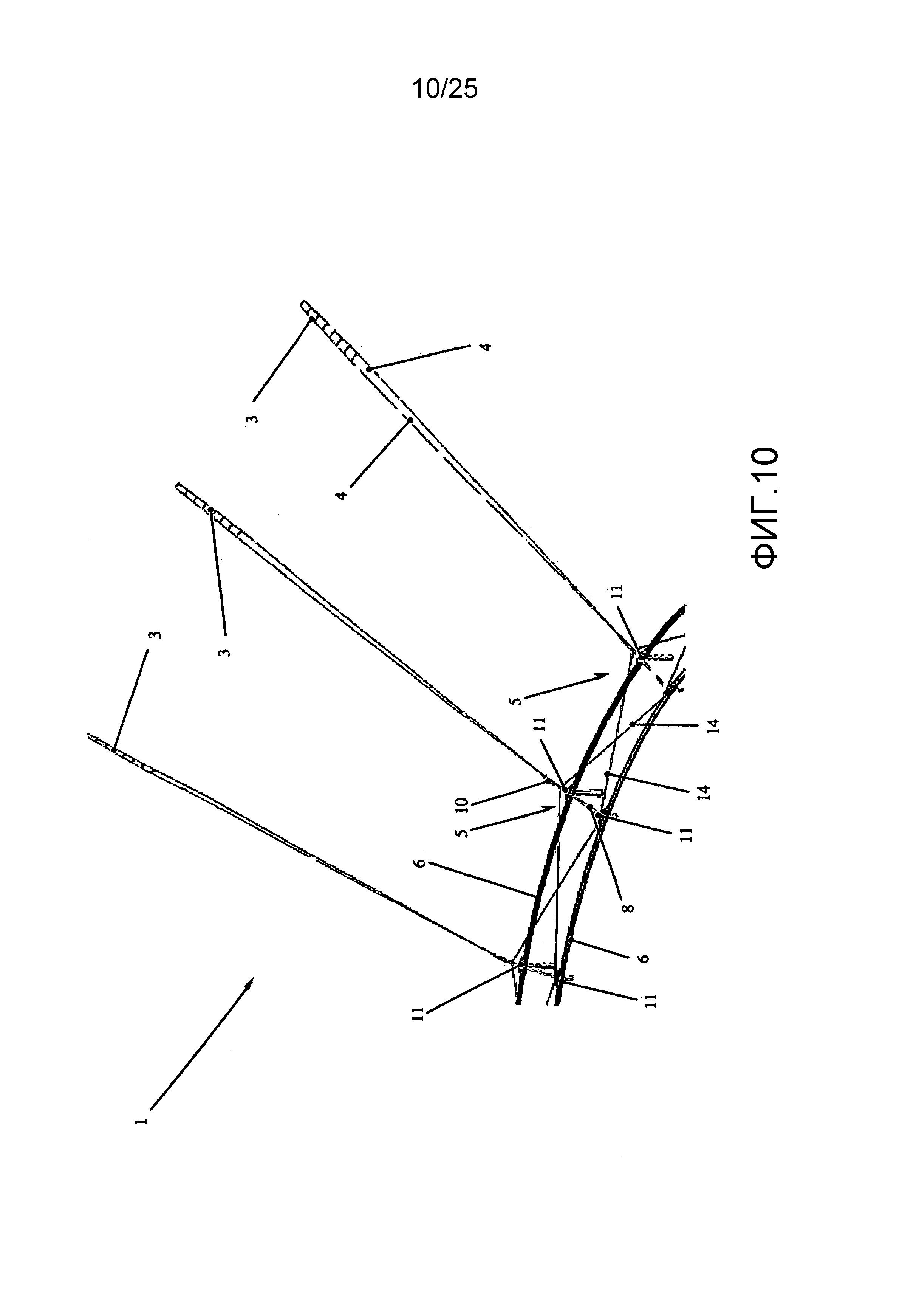
Фиг. 10 представляет собой общий вид предпочтительного варианта ветровой системы в соответствии с настоящим изобретением;
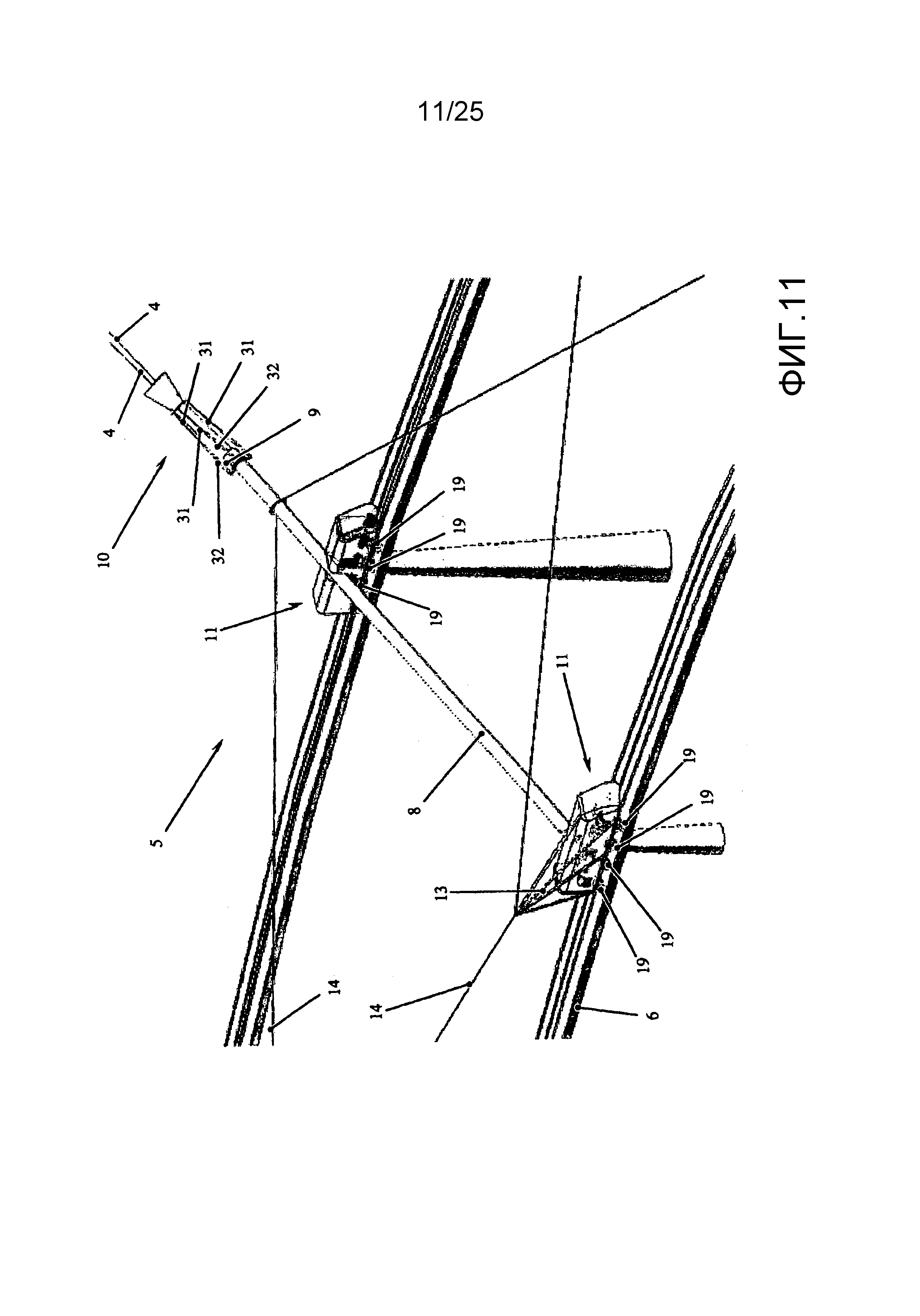
Фиг. 11 представляет собой увеличенный общий вид ветровой системы, показанной на фиг. 10;
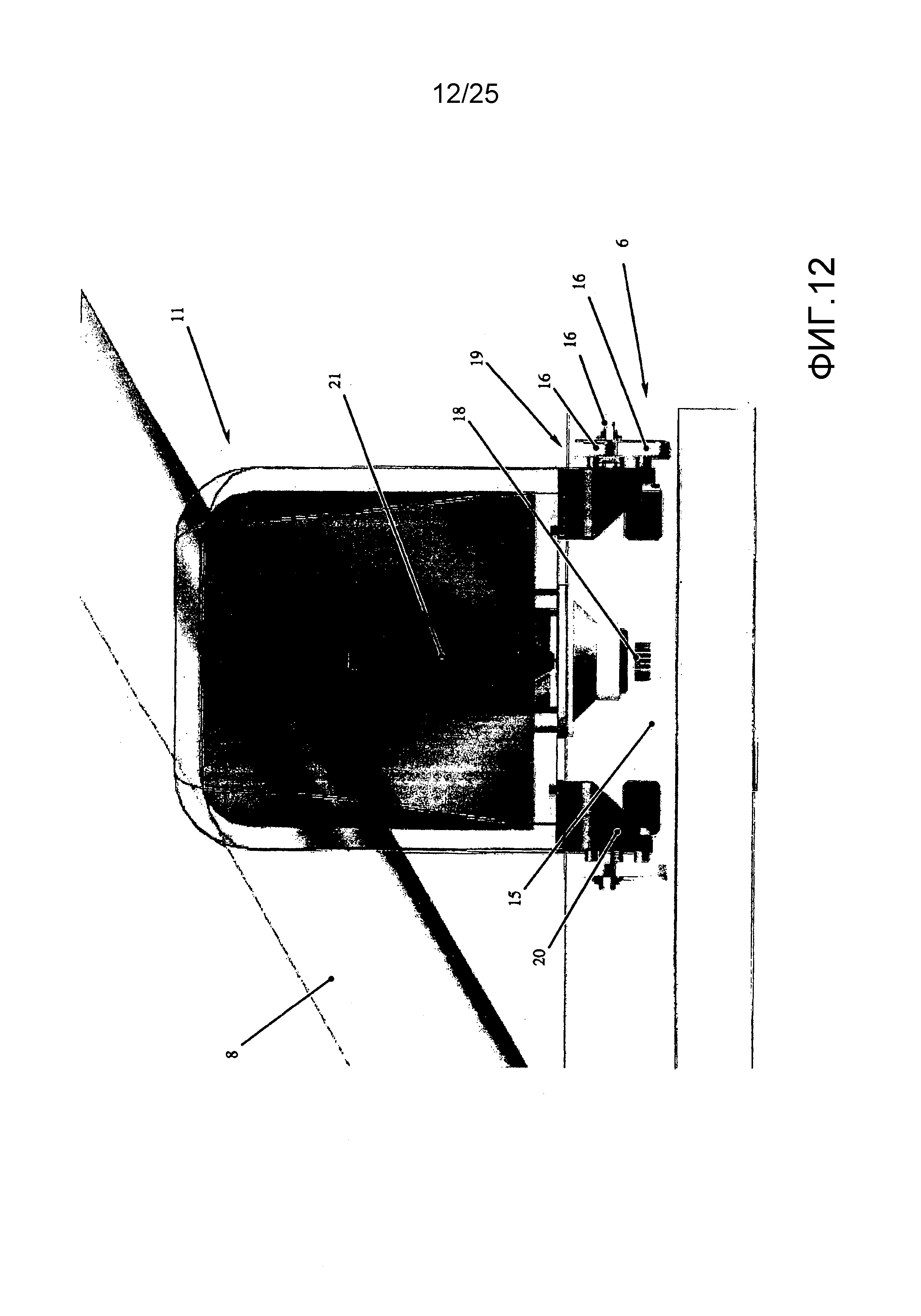
Фиг. 12 представляет собой увеличенный общий вид предпочтительного варианта осуществления элемента ветровой системы, показанной на фиг. 10;
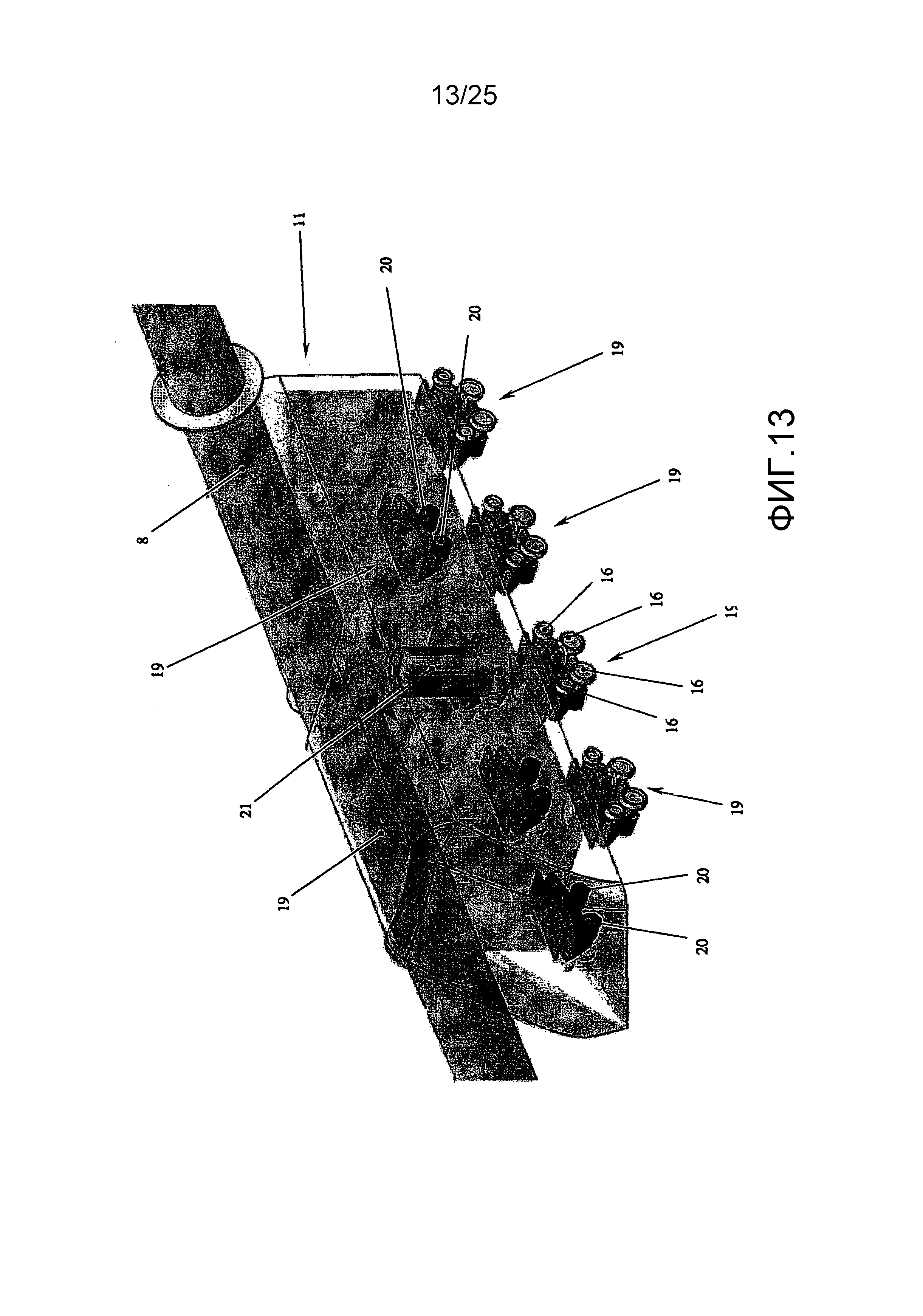
Фиг. 13 представляет собой другой общий вид элемента, показанного на фиг. 12;
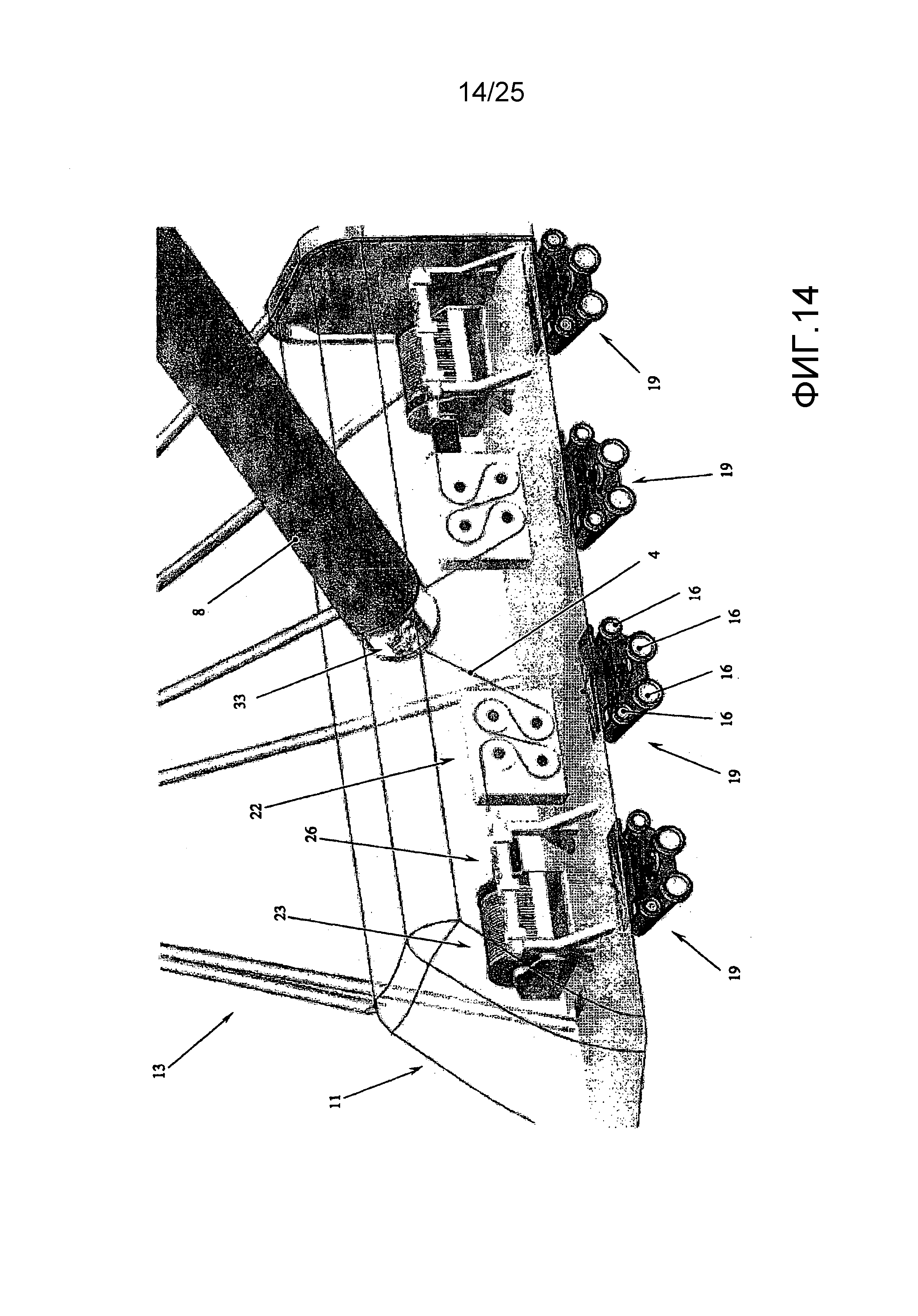
Фиг. 14 представляет собой увеличенный общий вид предпочтительного варианта осуществления другого элемента ветровой системы, показанной на фиг. 10;
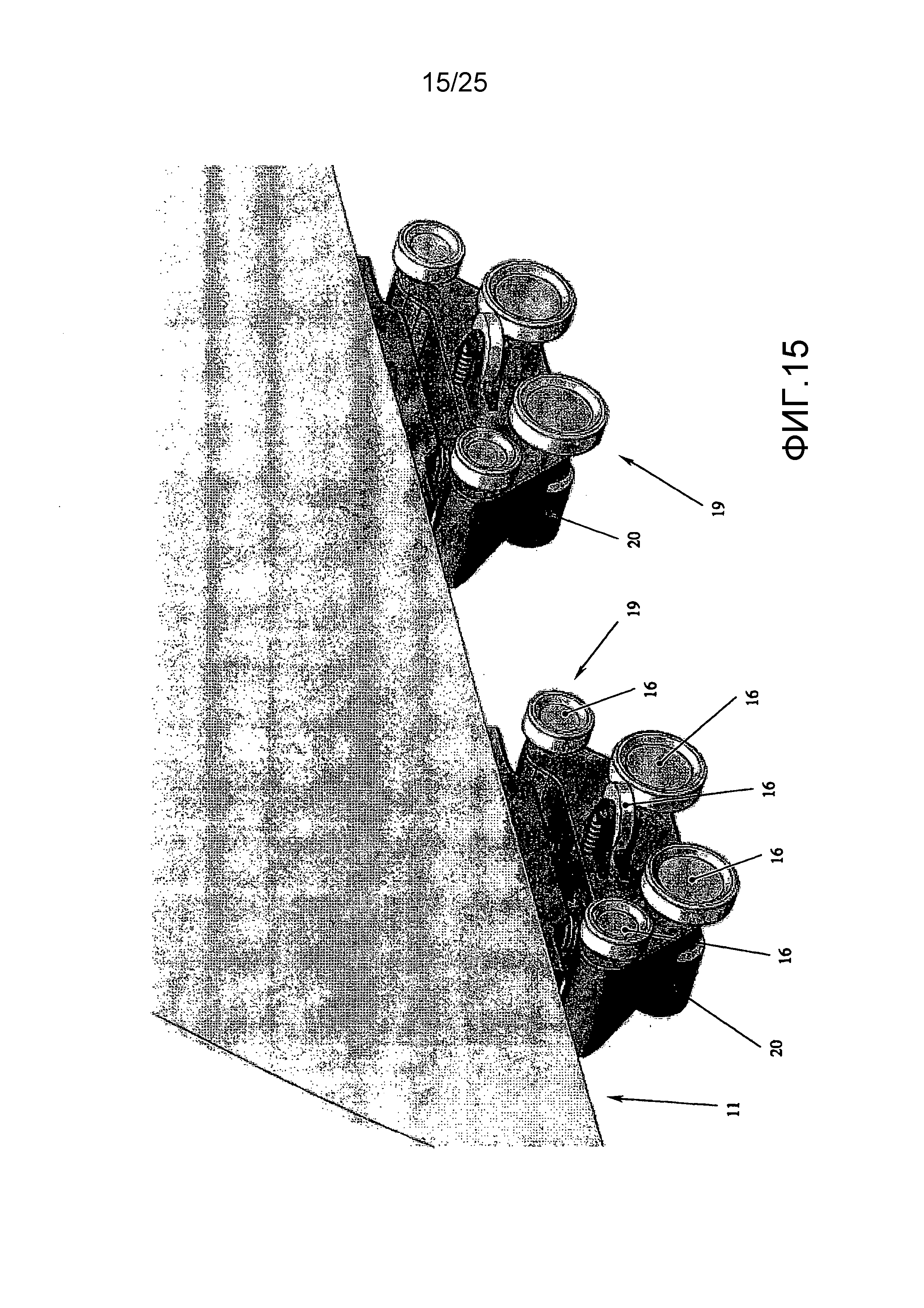
Фиг. 15 представляет собой увеличенный общий вид предпочтительного варианта осуществления другого элемента ветровых систем, показанных на фиг. 1 и 10;
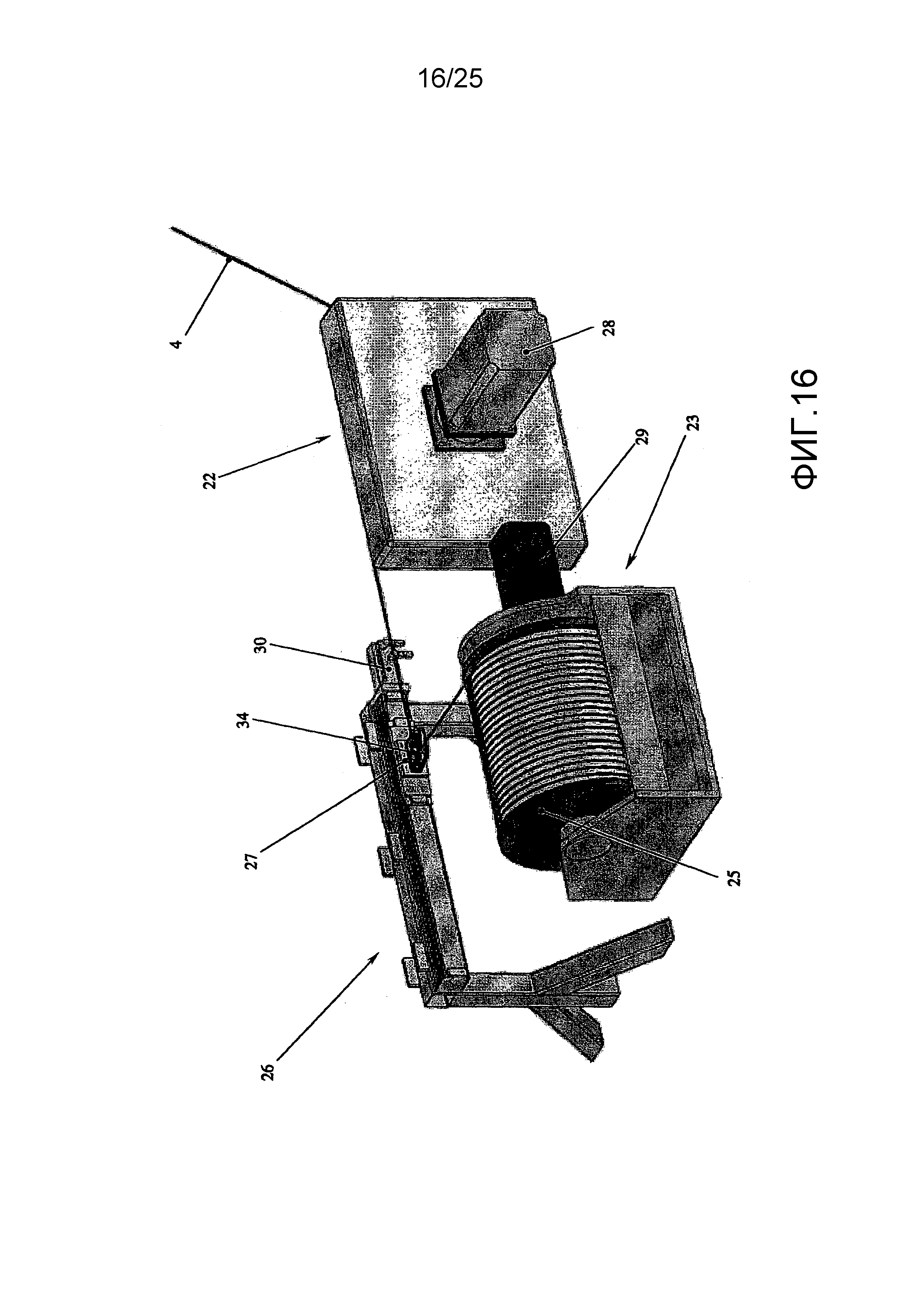
Фиг. 16 представляет собой увеличенный общий вид предпочтительного варианта осуществления других элементов ветровых систем, показанных на фиг. 1 и 10;
Фиг. 17 представляет собой другой увеличенный общий вид элементов, показанных на фиг. 16;
Фиг. 18 представляет собой схематичный вид другого предпочтительного варианта ветровой системы в соответствии с настоящим изобретением во время двух ее рабочих этапов;
Фиг. 19 представляет собой увеличенный схематичный вид системы, показанной на фиг. 18;
Фиг. 20 представляет собой схематичный вид во фронтальном разрезе предпочтительного варианта осуществления элемента ветровой системы, показанной на фиг. 18, во время двух его рабочих этапов;
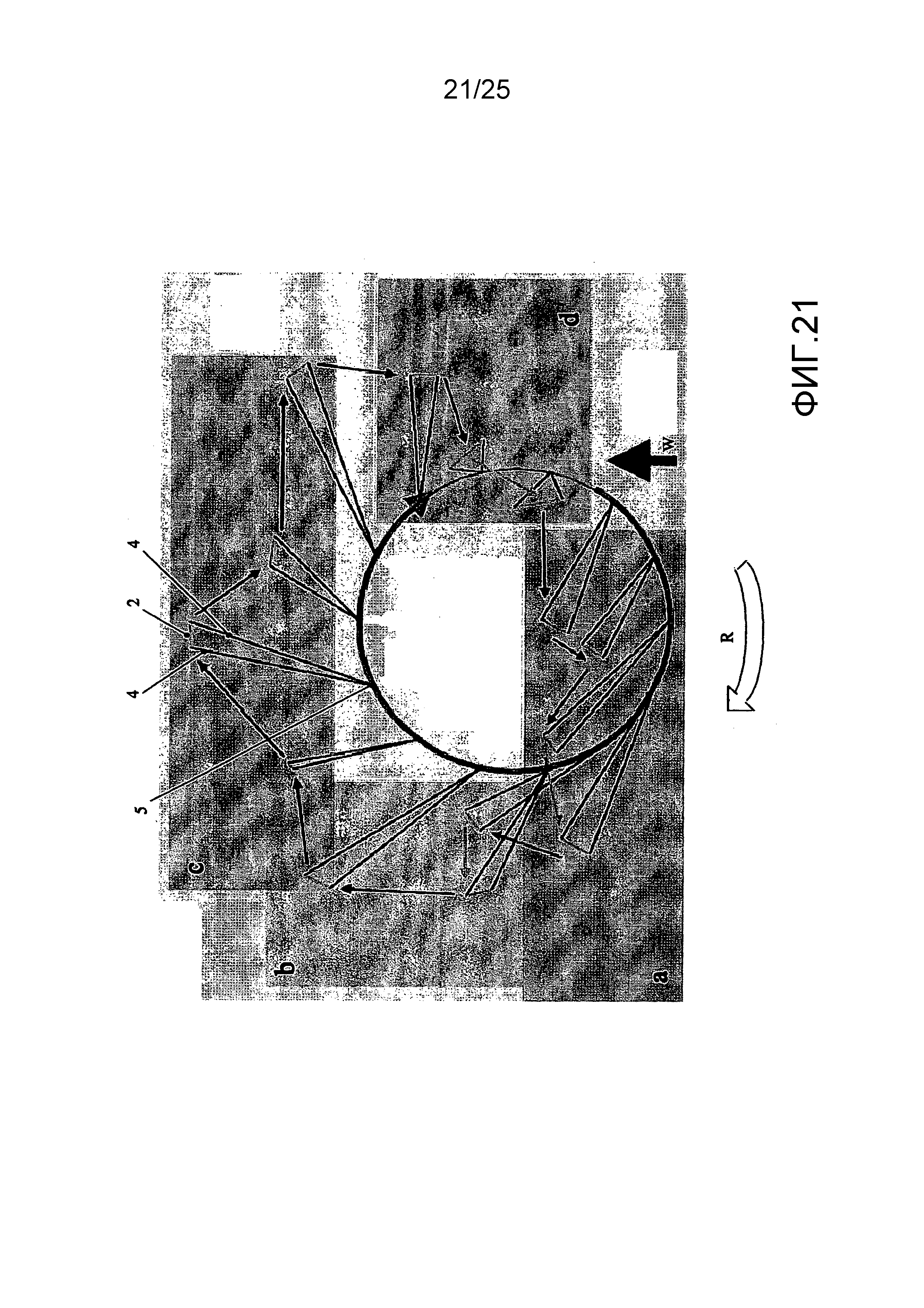
Фиг. 21 представляет собой схематичный вид системы в соответствии с настоящим изобретением во время некоторых ее рабочих этапов;
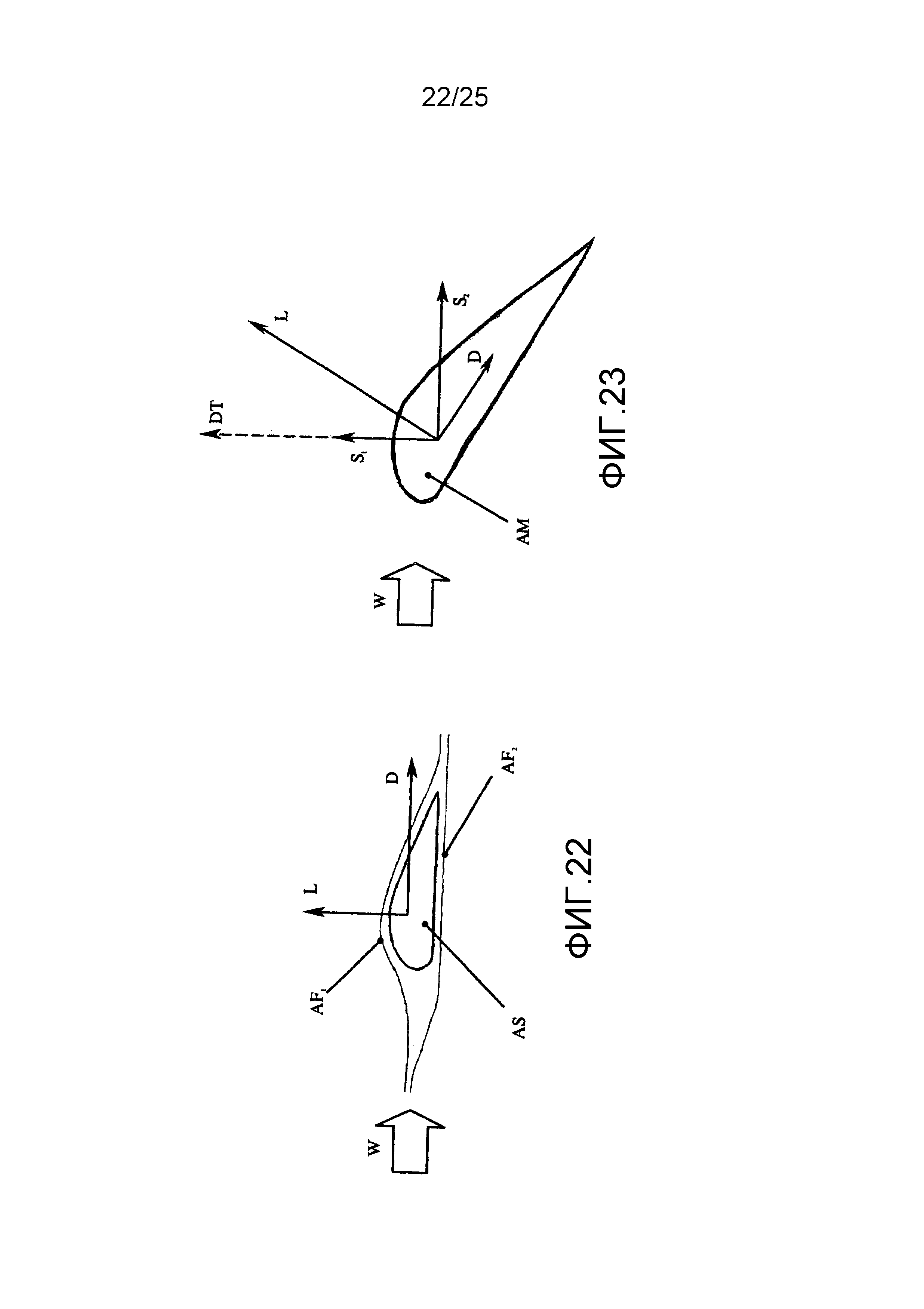
Фиг. 22 представляет собой схематичный вид неподвижной аэродинамической поверхности, погруженной в ветровое течение, и соответствующих сил, создаваемых посредством данной поверхности; и
Фиг. 23 представляет собой схематичный вид аэродинамической поверхности, свободной от перемещения вдоль направления, перпендикулярного скорости ветра, и соответствующих сил, создаваемых посредством данной поверхности;
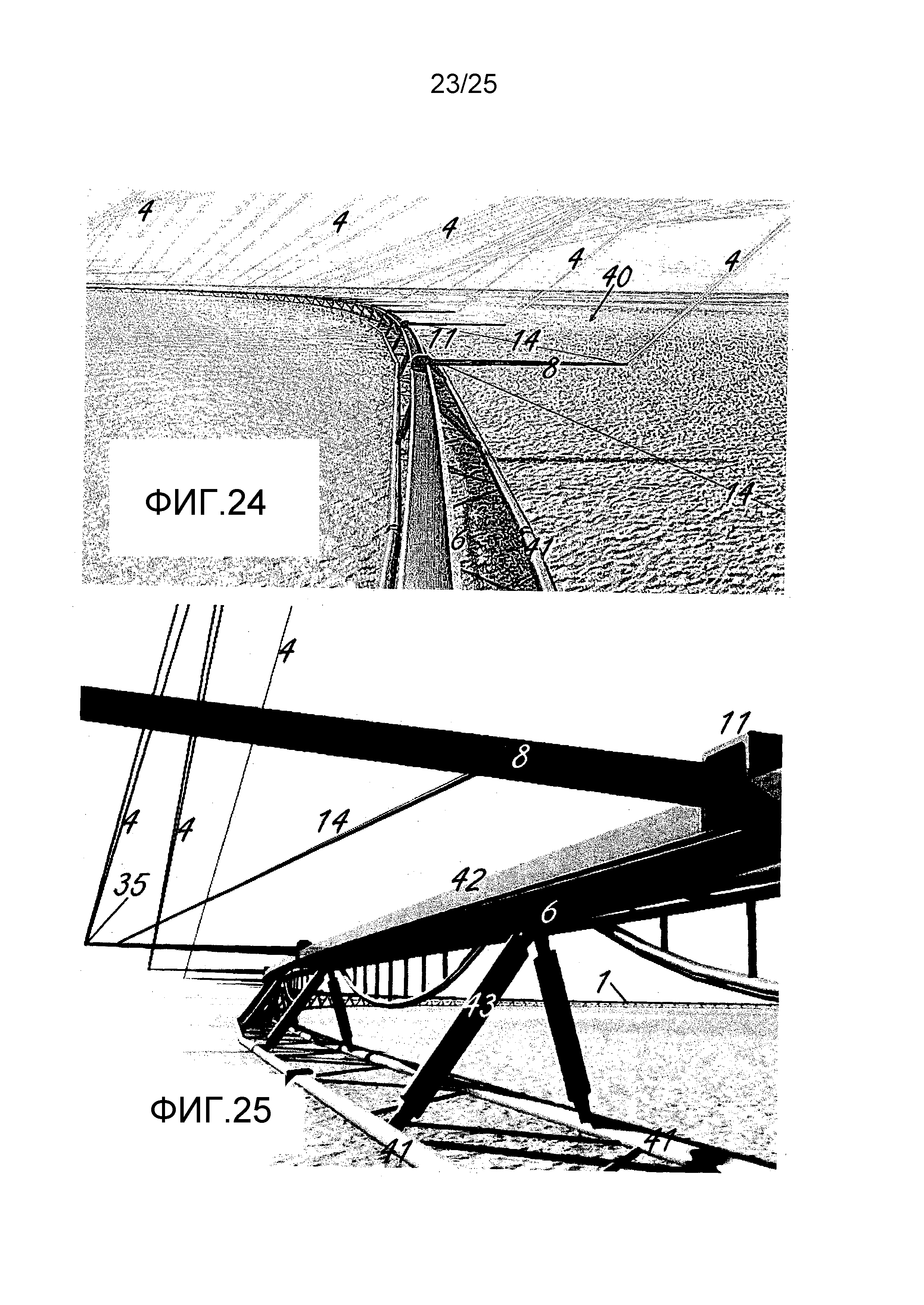
Фиг. 24 представляет собой увеличенный общий вид ветровой системы, показанной на фиг. 1;
Фиг. 25 представляет собой увеличенный общий вид ветровой системы, показанной на фиг. 1;
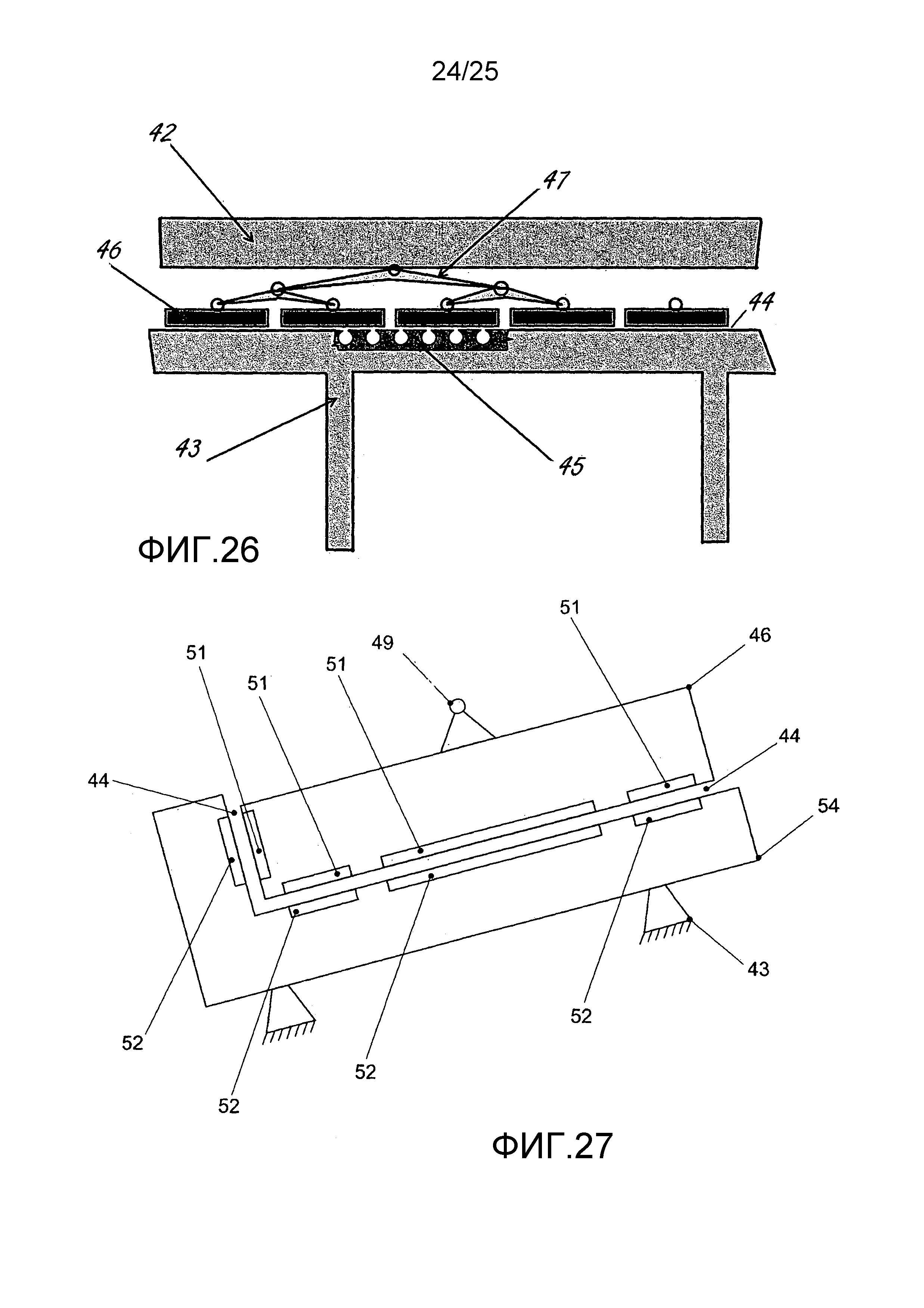
Фиг. 26 представляет собой увеличенный схематичный вид ветровой системы, показанной на фиг. 5;
Фиг. 27 представляет собой увеличенный схематичный вид ветровой системы, показанной на фиг. 5; и
Фиг. 28 представляет собой общий вид предпочтительного варианта осуществления ветровой системы в соответствии с настоящим изобретением.
Как можно видеть более подробно в приведенном ниже описании, ветровая система в соответствии с настоящим изобретением обычно содержит по меньшей мере один модуль, выполненный с возможностью перемещения вдоль рельса, предпочтительно выполненный так, чтобы образовать кольцеобразный замкнутый контур, под тягой по меньшей мере одного силового кайта, погруженного в ветровое течение, с которым он соединен посредством одного каната, причем такой модуль работает как автономный генератор, который преобразует в электроэнергию энергию ветра, улавливаемую на уровне тропосферы (который продолжается до приблизительно 15 км от поверхности земли). В частности, рядом с каждым модулем, энергия улавливается из ветра посредством цепочки кайтов, соединенных последовательно, приводимых в движение посредством лебедок с сервомеханизмом, автономно управляемых посредством интеллектуальной системы управления.
Со ссылкой на чертежи, можно отметить, что ветровая система 1 для преобразования энергии в соответствии с настоящим изобретением содержит по меньшей мере один мощный крыловидный профиль 2 (ниже в данном документе кратко называемый термином «кайт»), погруженный в по меньшей мере одно ветровое течение W и соединенный посредством по меньшей мере одного каната 4 с по меньшей мере одним модулем 5 для генерирования электроэнергии, размещенным около земли и приспособленным для перемещения вдоль по меньшей мере одного рельса 6 или 7. Кайты 2 приводятся в движение так, чтобы буксировать модули 5, с которыми они соединены и которые обеспечивают преобразование энергии ветра в электроэнергию посредством по меньшей мере одной генерирующей системы, содержащей по меньшей мере один генератор/двигатель 20 и/или 21, описанный ниже, для каждого модуля 5. Канаты 4 приспособлены как для передачи механической энергии от и к кайтам 2 для буксирования модулей 5, так и для управления траекторией полета самих кайтов 2.
Ниже в данном документе будет описан предпочтительный вариант осуществления ветровой системы 1 в соответствии с настоящим изобретением. Кроме того, со ссылкой на каждый элемент ветровой системы 1, будет показан ряд альтернативных характеристик и функциональных возможностей, которые, без ухудшения эксплуатационных характеристик, которые могут быть достигнуты, значительно уменьшают стоимость и размеры всей системы 1. Для этой цели, компьютеризированные многокритериальные методы принятия решений могут помочь определить оптимальные траектории для получения оптимальных конструкций, а также методы управления, целью которых является оптимизация работы и производительности устройств.
Альтернативные решения относятся к непрерывному и дискретному типу. Непрерывные функции могут быть рассмотрены просто посредством установления связи преимуществ, которые могут быть получены посредством изменения характеристик, таких как стоимость, вес, сопротивление, длины, углы, применительно к решению. Дискретные альтернативы должны быть перечислены и ниже, со ссылкой на каждый элемент ветровой системы 1, описаны их основные характеристики.
Таким образом, ветровая система 1 настоящего изобретения содержит кайты 2, выполненные, например, посредством переплетения волокон, используемых обычно для изготовления специальных парусов для некоторых видов спортивной деятельности, таких как, например, серфинг и картинг. Благодаря последним исследованиям в области аэродинамики, на рынке имеются кайты 2, которые способны удовлетворять некоторые потребности в плане управления и приведения в движение. Посредством надлежащего приведения в движение кайта 2, можно регулировать передачу энергии от ветра: это принципиально, поскольку кайты 2 должны приводиться в движение таким образом, чтобы тяга, обеспечиваемая посредством ветровых течений W, была максимальной и в то же время не мешала перемещению модулей 5 на рельсах 6. Поэтому кайты 2 должны приводиться в движение так, чтобы создавать тягу, которая перемещает модули 5 на рельсах 6 всегда вдоль упомянутого направления. Такой результат достигается посредством соответствующего регулирования передачи энергии от ветра, как будет более подробно описано ниже.
Когда кайты 2 во время полета стремятся подниматься при их рабочей скорости, аэродинамическое сопротивление канатов 4, соединенных с основанием системы 1, вызывает искривление цепочки, которое изменяет угол атаки кайтов 2, вынуждая их принимать положение планирования с повышенной эффективностью. Посредством регулирования угла атаки кайтов 2 так, чтобы они стали немного поднятыми или опущенными, получается по существу система с обратной связью, которая регулирует кажущуюся скорость кайтов 2.
Энергия, которую кайт 2 способен извлекать из ветра, зависит как от аэродинамического качества кайта 2, так и от его площади. В частности, такая энергия увеличивается пропорционально квадрату аэродинамического качества и в линейной зависимости от площади. Таким образом, для того чтобы определить оптимальное решение, которое максимизирует энергию, которую кайт 2 может улавливать из ветра, можно оказывать влияние на эти два фактора.
Эффективность кайта зависит от его формы. Поэтому выбор оптимальной формы является решающим вкладом в обеспечение высоких аэродинамических качеств. А кроме того, такая оптимальная форма должна поддерживаться, когда кайт 2 подвергается воздействию силы лобового сопротивления и подъемной силы (как более подробно описано ниже). Для этой цели можно использовать полужесткие кайты 2. В отличие от абсолютно жестких кайтов 2, полужесткие кайты 2 снабжены, например, очень легкой рамой, благодаря которой кайты 2 могут принимать форму, подобную, например, форме жестких крыльев планера. Например, кайты 2 могут быть выполнены в виде ромбов, изготовленных из полимеров. Использование полужесткости обеспечивает значительное улучшение эксплуатационных характеристик не только благодаря более высокому аэродинамическому качеству, но и благодаря облегчению приведения в движение. В частности, жесткость может быть асимметричной за счет двух размеров кайта 2, чтобы обеспечить боковую гибкость, полезную для восстановления кайта 2 в соответствующей системе 8 восстановления, описанной ниже.
Для того чтобы максимизировать энергию, которая ветровая система 1 настоящего изобретения должна быть способна извлекать из ветра W, предпочтительно использовать, для каждого модуля 5, множество кайтов 2, взаимно соединенных последовательно так, чтобы образовать цепочки 3 кайтов 2, для того чтобы суммировать силу тяги на канатах 4. Таким образом увеличивается площадь W фронта ветра, которую каждый модуль 5 способен перехватывать. Это приводит к увеличению эффекта буксирования, который перемещает модуль 5 и соответственно к увеличению электроэнергии, которая может вырабатываться в каждом рабочем цикле. Каждая цепочка 3 кайтов 2 соединена с модулем 5 посредством единой системы канатов 4: следовательно, принцип работы ветровой системы 1 не зависит от количества кайтов 2, соединенных последовательно в цепочку 3. Такая многослойная конфигурация не только увеличивает перехватываемую площадь W фронта ветра, но и, если она выполнена в виде отдельного предмета или соответственно соединенного предмета, также обеспечивает возможность повышения аэродинамического качества. Канаты 4 могут быть фактически встроены в «стенки» кайтов 2 (не показано в чертежах) или же сами стенки кайтов 2 могут представлять собой соединительный элемент между кайтами 2 (не показано в чертежах), в свою очередь имеющий аэродинамический профиль и поддерживающий геометрически устойчивую конструкцию. Это обеспечивает возможность удаления канатов 4 (и, следовательно, оказываемого ими лобового сопротивления) в области максимальной скорости системы. Для того чтобы достигнуть такого результата, кайты 2 могут принимать форму дуги, к которой концевые стенки проходят так, чтобы соединяться с другими кайтами 2, или формы, которые стремятся приближаться к плоским крыльям с одной или двумя соединительными стенками.
Ниже в данном документе, для полноты, будет сделана ссылка на случай, в котором ветровая система 1 содержит цепочку 3 кайтов 2 для каждого модуля 5. Количество перекрывающихся кайтов 2 может произвольно увеличиваться. Кроме того, посредством сохранения постоянной общей площади, при увеличении количества кайтов 2, образующих одну цепочку 3, размер кайта уменьшается. Это упрощает маневры восстановления и выталкивания, которые будут более подробно описаны ниже. Вариант осуществления ветровой системы 1 в соответствии с настоящим изобретением предусматривает, что не все кайты 2, принадлежащие одной цепочке 3, имеют одинаковые размеры. Кайты 2 в верхней части цепочки 3 по соотношению размеров и соответствующим аэродинамическим качествам отличаются от кайтов 2 в нижней части. Таким образом, кайты 2, ближайшие к модулю 5, отличаются большей площадью, и по мере приближения к верхнему концу цепочки 3 размеры кайтов уменьшаются. Применение такой конфигурации обусловлено тем, что чем дальше кайт 2 от модуля 5, с котороым он связан посредством каната 4, тем больше его скорость во время его полета. Таким образом, переходя от нижнего конца к верхнему концу цепочки 3 кайтов 2, можно компенсировать увеличение скорости полета кайтов 2 постепенным уменьшением их поверхности. Таким образом, энергия, извлекаемая из ветра W, одинаковая для каждого кайта 2 данной цепочки 3.
Ветровая система 1 в соответствии с настоящим изобретением содержит тяговые канаты 4, приспособленные для передачи сил от и к кайтам 2 и используемые для буксирования модулей 5 для преобразования энергии и для контролирования траектории колеса самих кайтов 2. Тяговые канаты 4 представляют собой элемент, который должен иметь надлежащие размеры, поскольку возможное превышение необходимого размера неизбежно приводит к увеличению их аэродинамического сопротивления. Вариант осуществления ветровой системы 1 в соответствии с настоящим изобретением предусматривает, что канаты 4 имеют переменные участки (не показано в чертежах). В частности, участки канатов 4 рядом с модулями 5 ветровой системы 1 (то есть участки канатов 4, подвергаемые непрерывным силовым маневрам и в контакте с системами, приспособленным для осуществления таких маневров и описанными ниже), имеют больший размер относительно участков канатов 4 рядом с цепями 3 кайтов 2. Это позволяет обеспечивать более высокую износостойкость. Изменение размера участка может быть непрерывным или ступенчатым со смещениями. Для того чтобы дополнительно уменьшить лобовое сопротивление участков канатов 4, подвергаемых воздействию более высоких скоростей (а именно отрезков каната 4 рядом с цепями 3 кайтов 2), участок канатов 4 рядом с данными отрезками, например, может быть подвергнут аэродинамическому моделированию в соответствии с кайтом, которое создает небольшую асимметричную подъемную силу, устраняя явления турбулентности и вибрации. Такой результат может быть получен, например, посредством покрытия канатов 4 экструдированной оболочкой с сечением в виде звезды (не показанной в чертежах): таким образом, выступы звезды оболочки сгибаются под действием ветра W до тех пор, пока не будет реализована аппроксимация кайта. В случае колебательного контакта, упомянутые выступы создают взаимное трение, чтобы поглощать потенциальную энергию, тем самым демпфируя колебание.
Ветровая система 1 в соответствии с настоящим изобретением дополнительно содержит по меньшей мере один модуль 5, который перемещается на по меньшей мере одном рельсе 6, например, посредством колес 16, 17 или посредством магнитной левитации, выполненный с возможностью приведения в движение кайтов 2 и преобразования энергии ветрового течения в электроэнергию. Модули 5 расположены рядом с землей и каждый модуль 5 соединен с цепочкой 3 кайтов 2 посредством по меньшей мере одного каната 4, приспособленного для передачи сил от и к кайтам 2 и используемого для буксирования модуля 5 для преобразования энергии и для управления траекторией полета самих кайтов 2.
Со ссылкой на чертежи, можно отметить, что каждый модуль 5 ветровой системы 1 содержит по меньшей мере одну тележку 11, посредством которой каждый модуль 5 перемещается на по меньшей мере одном рельсе 6. Форма тележек 11 модулей 5 ветровой системы 1 предпочтительно подвергается аэродинамическому моделированию, чтобы минимизировать сопротивление воздуху при приведении в действие ветровой системы 1.
Каждый модуль 5 содержит все необходимые элементы для автоматического приведения в движение кайтов 2 и для генерирования электроэнергии. Преобразование механической энергии в электроэнергию осуществляется, например, посредством генераторов 20 и/или 21, непосредственно соединенных с колесами 16 и 18, вращающимися за счет эффекта буксировки модулей 5 на рельсе 6, образующих электрическую генерирующую систему. В качестве альтернативы приведению в действие генераторов 20 и/или 21 посредством колес 16, преобразование механической энергии в электроэнергию может осуществляться посредством реверсивно используемых линейных магнитных двигателей (не показанных в чертеже). Таким образом, каждый модуль 5 представляет собой генератор, способный выдавать электроэнергию независимо от других модулей 5.
Ветровая система 1 настоящего изобретения дополнительно содержит интеллектуальную систему управления, оказывающую действие на каждый модуль 5 и посредством которой осуществляется автоматическое управление полетом кайтов 2, и систему питания, взаимодействующую с такой интеллектуальной системой управления так, чтобы управлять аккумулированием и выдачей электроэнергии, вырабатываемой генераторами 20 и/или 21 во время перемещения модуля 5 вдоль рельса 6 под действием эффекта буксировки посредством кайтов 2, с которыми он соединен посредством канатов 4.
Для каждого модуля 5, интеллектуальная система управления приводит в движение цепочку 3 кайтов 2 так, чтобы использовать эффект буксирования, чтобы вынуждать модули 5 перемещаться по замкнутой траектории. В частности, интеллектуальная система управления взаимодействует с комплектом датчиков с автономным питанием, размещенных на кайтах 2, которые передают информацию, предпочтительно беспроводным способом, в наземные элементы интеллектуальной системы. Интеллектуальная система управления объединяет данную информацию с другой информацией, поступающей от комплекта наземных датчиков (например, величиной нагрузки канатов 4, определяемой посредством считывания пар двигателей 28, более подробно описанных ниже) и осуществляет обработку так, чтобы автоматически приводить в движение кайты 2, когда ветровая система 1 функционирует.
С точки зрения приведения в движение кайтов 2, ветровая система 1 в соответствии с настоящим изобретением предусматривает два способа.
Первый способ состоит в использовании силовых канатов в качестве приводных канатов. Таким образом, каждая цепочка 3 кайтов 2 соединена с соответствующим модулем 5 посредством пары канатов 4. Такие канаты 4 прежде всего обеспечивают возможность буксирования модуля 5 (и таким образом генерирования электроэнергии) с учетом передачи механической энергии, извлекаемой из ветровых течений W. Упомянутые канаты 4 дополнительно разматываются и наматываются на соответствующие лебедки 24 и 25, чтобы приводить в движение цепочку 3 кайтов 2.
Второй способ приведения в движение состоит в использовании спойлеров (не показанных в чертежах), размещенных на борту кайтов 2. Посредством таких спойлеров можно создавать турбулентности, которые вызывают градиенты давления, посредством которых кайты 2 приводятся в движение. Упомянутые спойлеры могут приводиться в движение, например, посредством пьезоэлектрических систем, полимеров с памятью формы и/или волокон из металлических сплавов с памятью формы, деформация которых активно контролируется. Такая система имеет автономное питание или выполнена с возможностью питания через кабели (не показанные), которые продолжаются от модуля 5 до кайтов 2. Сигналы управления для приведения в движение спойлеров, предпочтительно, передаются беспроводным способом посредством интеллектуальной системы управления. За счет использования спойлеров можно приводить в движение кайты 2 без необходимости применения канатов 4. В таком случае система, которая обеспечивает маневрирование кайтов 2, расположена на их борту, и цепочка 3 кайтов 2 может быть соединена с соответствующим модулем 5 посредством одного каната 4, используемого исключительно для передачи нагрузки и обеспечения возможности буксирования модуля 5.
Приведение в движение кайтов 2 может также осуществляться посредством применения обоих вышеописанных способов.
Таким образом, для приведения в движение и получения тяги от кайтов 2 существуют разные подходы с использованием одного или нескольких приводных канатов 4. Один канат 4 требует возможности выполнения маневров для приведения в движение систем на борту кайтов 2, будучи ограниченным передачей тяги; тогда как два каната 4 совмещают функцию приведения в движение с функцией тяги. При увеличении количества канатов 4 можно также добавлять функции приведения в движение в виде коррекции угла атаки кайта 2, функции безопасности и функции быстрого сваливания. Таким образом, в случае приведения в движение посредством канатов 4 (с или без поддержки спойлеров), каждая цепочка 3 кайтов 2 должна быть соединена с соответствующим модулем 5 посредством пары канатов 4. В случае же приведения в движение только посредством спойлеров, предусмотрен один канат 4, который функционирует как соединительный элемент между цепочкой 3 кайтов 2 и модулем 5. В таком случае соответственно уменьшается количество элементов модулей 5, которые приводят в движение или хранят канаты 4, и значительно упрощается структура ветровой системы 1.
Ниже в данном документе будет сделана ссылка на случай, в котором, в ветровой системе 1 в соответствии с настоящим изобретением, приведение в движение кайтов 2 осуществляется посредством пары канатов 4. Для каждого элемента ветровой системы 1, подробно описанного ниже, в любом случае будут указаны упрощения, которые можно вносить в случае использования одного каната 4 для буксирования каждого модуля 5.
Хотя ограничение количества канатов 4 предпочтительно с точки зрения аэродинамики, решение с двумя канатами 4, помимо только приведения в движение и тяги, обеспечивает также возможность выполнения экстренных маневров. Направленное движение обычно получается посредством ограниченного дифференцированного изменения длины соответствующих канатов 4, однако если такое дифференцированное изменение соответствующих канатов 4 превышает раскрытие крыла кайтов 2, то возникает ситуация, когда подъемная сила, определяемая ниже в данном документе как «боковое скольжение крыла», пропадает. При данном положении, если возникает необходимость быстрого возврата, можно быстро сматывать канаты 4 не расходуя энергию. Однако во время такого быстрого снижения, вследствие эффекта бокового скольжения крыла, существует риск закручивания кайта 2 со значительной потерей управления. Чтобы предотвратить такую потерю управления, можно снабдить кайты 2 аэродинамическими устройствами и компоновками, которые позволяют легко прекращать быстрое снижение при достижении требуемой высоты и надлежащим образом восстанавливать нормальный и продуктивный режим полета. Во время этапов бокового скольжения крыла, боковой край кайта 2 становится краем атаки и вмещает в себя не только приборы, отслеживающие положение в трехмерном пространстве, но и систему привода и стабилизации маневра бокового скольжения (не показано в чертежах). Упомянутая система привода и стабилизации, например, отличается направленными спонсонами и спойлерами, управляемыми посредством интеллектуальной системы управления.
При нормальных условиях полета, направленные спонсоны расположены поперек направления тяги и убираются посредством сгибания, чтобы не изменять эффективность кайта 2. При боковом скольжении крыла, направленные спонсоны поднимаются, приводимые в движение потоком, который появляется в прямом направлении. Таким образом, направленные спонсоны появляются во время повторной балансировки проникания кайта 2, когда он недолжным образом используется при боковом скольжении крыла, пассивно улучшая устойчивость маневра. Дополнительная компоновка стабилизации активно получается, когда спойлеры/спойлер (уже упоминавшиеся ранее) соответственно размещаются и геометрически приводятся в движение посредством логики, которая использует непосредственно, или посредством наземного управления, информацию датчиков слежения за полетом, чтобы противодействовать тенденции к закручиванию.
Система привода и стабилизации маневра бокового скольжения обеспечивает мгновенные коррекции/снижения высоты кайта 2 во время спуска и, как только будет достигнута требуемая высота или удлинение канатов 4, восстановление подъемной силы посредством возвращения к другой длине канатов 4, совместимой с нормальным полетом.
В ветровой системе 1 в соответствии с настоящим изобретением, применение системы привода и стабилизации маневра бокового скольжения преимущественно состоит в быстром и управляемом выходе из зоны в воздушном пространстве.
Ветровая система 1 в соответствии с настоящим изобретением дополнительно содержит по меньшей мере одну систему 8 восстановления для кайтов 2: в приведенном ниже описании, ветровая система 1 будет описана в соответствии с двумя предпочтительными вариантами осуществления, приведенными в качестве неограничивающего примера: данные варианты осуществления выбраны в основном исходя из способов поддерживания систем 8 восстановления кайтов 2.
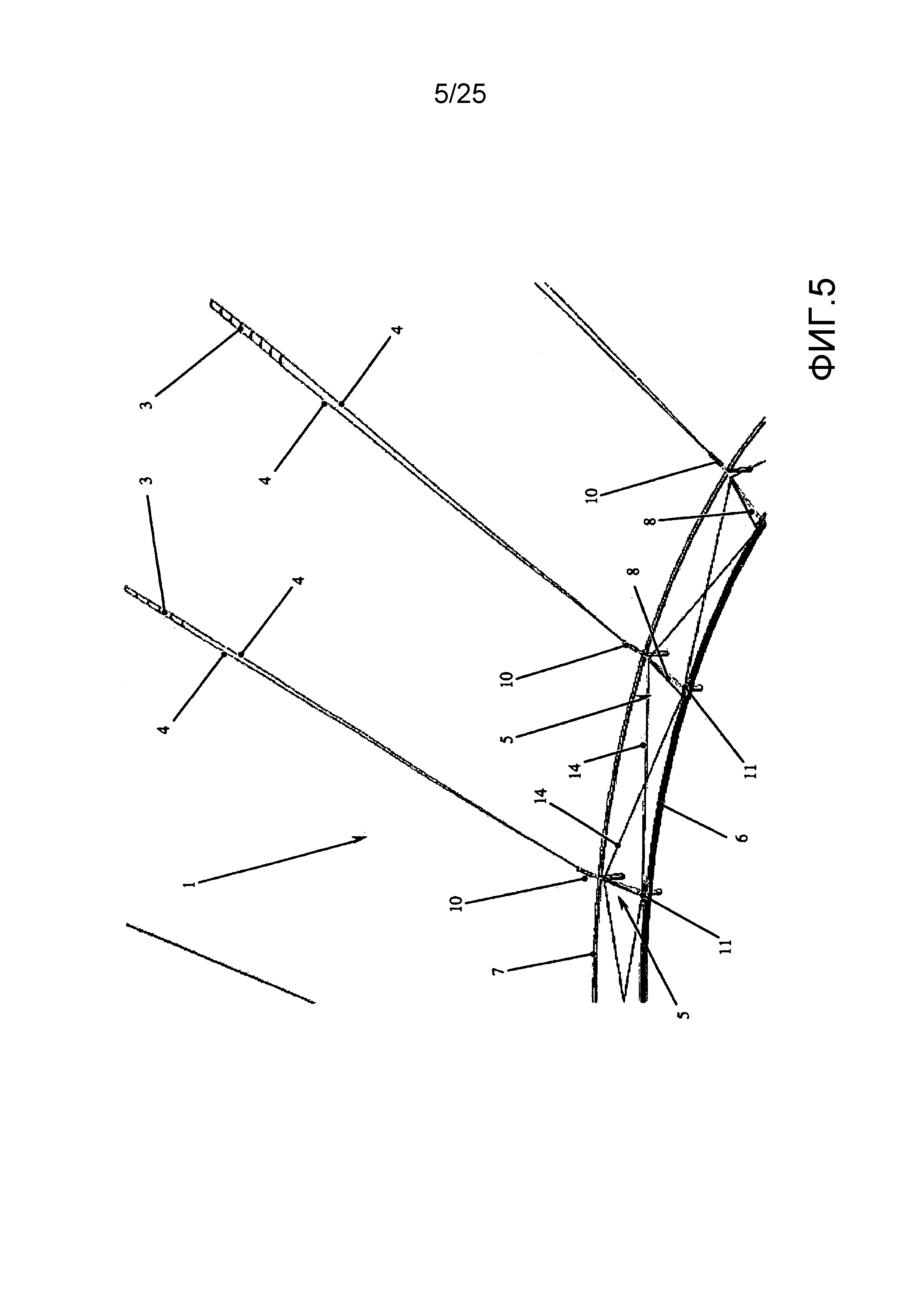
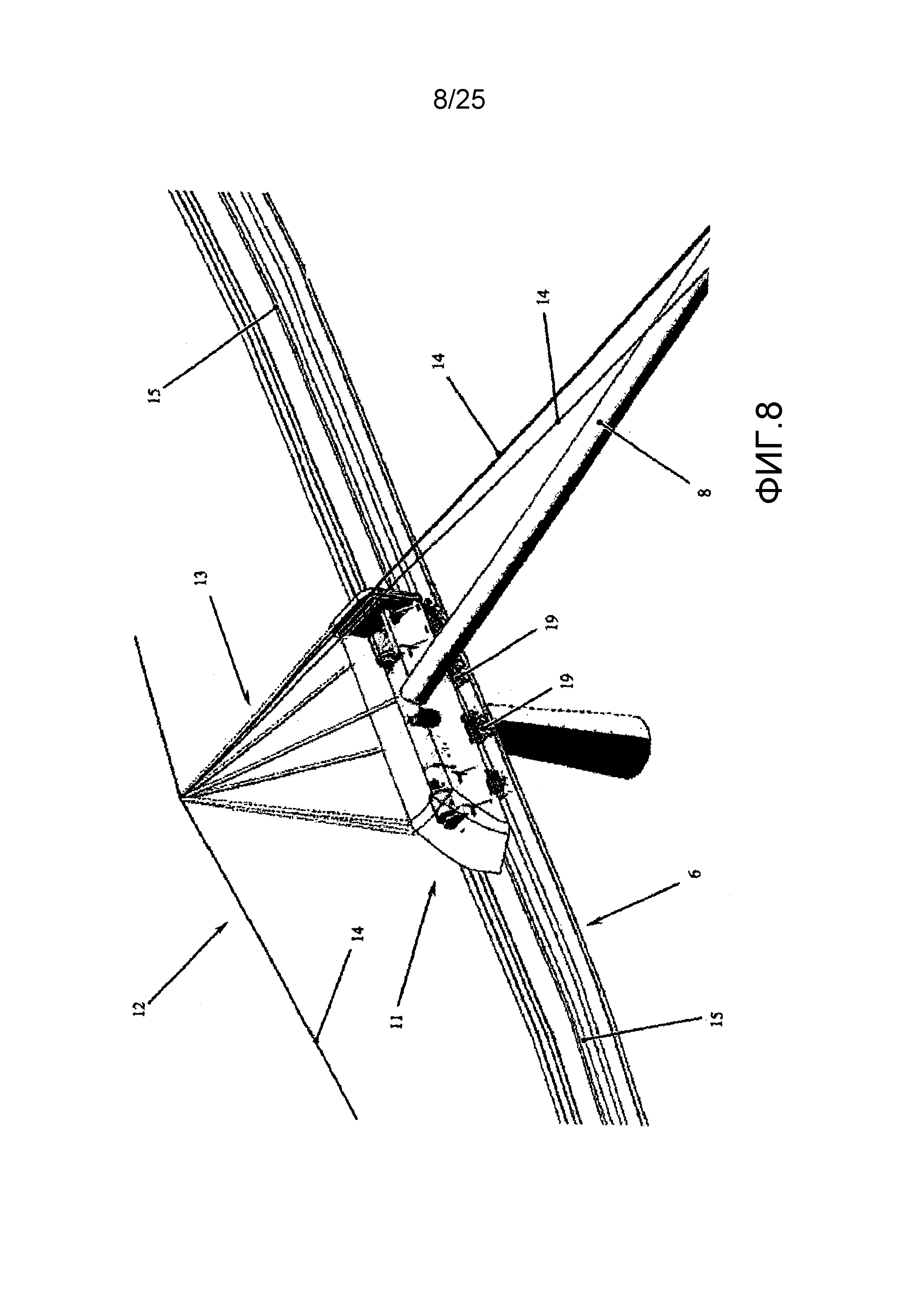
В соответствии с первым вариантом осуществления, ветровая система 1 настоящего изобретения содержит по меньшей мере один модуль 5, содержащий одну тележку 11, рядом с которой размещены генераторы 20 и/или 21, преобразующие энергию, и элементы системы для приведения в движение кайтов 2. Со ссылкой на фиг. 5-9, можно отметить, что системы 8 восстановления прикреплены к модулям 5 ветровой системы 1 рядом с концом. Вес систем 8 восстановления поддерживается посредством растянутой гибкой структуры 12, состоящей из соединительных тяг 14, прикрепленных одним концом к системам 8 восстановления, а другим концом к вертикальной структуре 13, например, решетке, которой снабжен каждый модуль 5. Растянутая гибкая структура 12 дополнительно соединяет каждый модуль 5 ветровой системы 1 с по меньшей мере двумя, возможно соседними модулями 5. За счет взаимного соединения разных модулей 4, если отсутствует эффект буксирования на один модуль 5, то такой модуль 5 будет буксироваться посредством других модулей 5 ветровой системы 1, для которых эффект буксирования имеет место. Это позволяет обойтись (или возможно задерживать) без приведения в действие генераторов 20 и/или 21, используемых для выработки электроэнергии в качестве двигателей, для обеспечения перемещения модуля 5 и более подробно описанных ниже.
В соответствии с таким вариантом осуществления, системы 8 восстановления могут быть также снабжены, например, подрессоренными колесами 17, посредством которых они опираются на вспомогательные рельсы 7. Таким образом, вес систем 8 восстановления поддерживается посредством системы соединительных тяг 14 не полностью, а частично разгружается на землю.
Вариант осуществления целостной ветровой системы 1 с гибкими структурными растянутыми техническими средствами, которые тщательно соединяют элементы, работающие в сжатии с системами буксирных канатов, распределяет и рассредоточивает силы и переходные процессы каждой цепочки 3 кайтов 2 на целостной ветровой системе 1, используя взаимодействие между отдельными модулями 5 и уменьшая необходимость завышения размеров.
Форма, которую может принимать растянутая гибкая структура 12 в целом, является предметом тщательного анализа методом моделирования, а типы выполнены в виде ряда треугольных секций, выстроенных в соответствии с цилиндрической симметрией, в идеале наподобие соломенной шляпы или чашки (не показано в чертежах).
Из числа усилий, которые должна выдерживать растянутая гибкая структура 12, имеется составляющая тяги кайтов 2 в касательном направлении, которая реально создает энергию. Как было отмечено выше, растянутая гибкая структура 12 должна также выдерживать вес систем 8 восстановления, особенно серьезный элемент прежде всего когда отсутствуют вспомогательные рельсы 7 и в ситуации останова ветровой системы 1 (когда системы 8 не поддерживаются или компенсируются вертикальной составляющей тяговой силы кайтов 2). При данном условии, весь вес системы 8 статически поддерживается посредством растянутой гибкой структуры 12, геометрическая конфигурация которой содержит кольцо (не показанное в чертежах), которое отслеживает замкнутую траекторию ветровой системы 1. Такое кольцо может отслеживать пересекающиеся движения относительно различных модулей 5.
Второй вариант осуществления ветровой системы 1 в соответствии с настоящим изобретением содержит по меньшей мере один модуль 5, снабженный по меньшей мере двумя тележками 11, которые перемещаются на параллельных рельсах 6, размещенных, например, на разных высотах. Со ссылкой на фиг. 10-14, можно отметить, что, в соответствии с таким вариантом осуществления, для каждого модуля 5 система 8 восстановления прикреплена к двум тележкам 11. Тележка 11 расположена рядом с концом системы 8 восстановления, из которого канаты 4 выходят по направлению к кайтам 2, и содержит генераторы 20 и/или 21, посредством которых осуществляется преобразование энергии. Другая тележка 11 расположена рядом с другим концом системы 8 восстановления и содержит другие элементы, которые обеспечивают приведение в движение кайтов 2 и хранение канатов 4. Как отмечено также для предыдущего варианта осуществления, системы 8 восстановления могут быть также снабжены, например, подрессоренными колесами 17, посредством которых они опираются на вспомогательные промежуточные рельсы 7, которые способствуют поддержке системы 8 восстановления (не показано в чертежах). Можно снабдить обе тележки 11 модулем 5 с генераторами 20 и/или 21 для выработки электроэнергии. Ниже в данном документе будет сделана ссылка на случай, в котором, для каждого модуля 5, генераторы 20 и/или 21 размещены на одной тележке 11, в соответствии с вышеупомянутым вариантом. Размещение рельсов 6, на которых перемещаются тележки 11, на разных высотах обеспечивает наклонное расположение систем 8 восстановления относительно земли по направлению к цепочке 3 кайтов 2, чтобы обеспечить меньшее сопротивление канатов 4 при приведении в действие ветровой системы 1. Кроме того, данный вариант осуществления предусматривает растянутую гибкую структуру 12 для соединения каждого модуля 5 ветровой системы 1 с по меньшей мере двумя соседними модулями 5. Благодаря взаимному соединению разных модулей 5, если отсутствует эффект буксирования на один модуль 5, то такой модуль 5 будет буксироваться посредством других модулей 5 ветровой системы 1, для которых эффект буксирования имеет место.
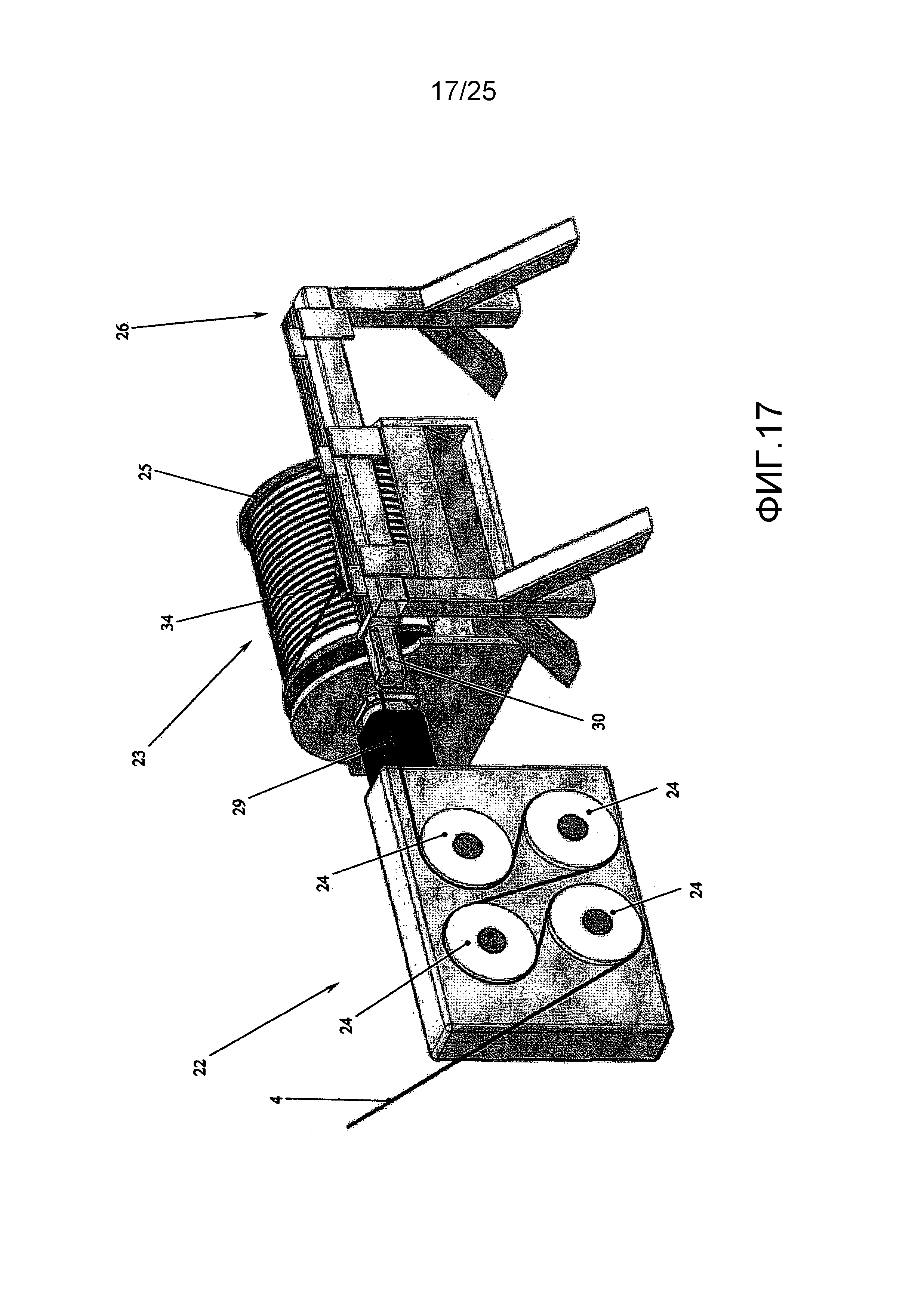
В обоих вышеописанных вариантах осуществления, система 8 восстановления кайтов 2 входит в состав системы для их восстановления и выталкивания (не показанной в чертежах). Пара канатов 4, соединенных с цепочкой 3 кайтов 2, пересекает систему 8 восстановления и распространяется на систему передачи, снабженную по меньшей мере одной системой для демпфирования скачков силы (не показанной в чертежах) канатов 4 и по меньшей мере одной системой фрикционирования (не показанной в чертежах) для канатов 4, которая приводит в движение канаты 4 к системе 22 сматывания и разматывания, содержащей по меньшей мере одну пару из четырех лебедок 24 для приведения в движение цепочки 3 кайтов 2, и системой 23 хранения канатов 4, состоящей из по меньшей мере одной пары лебедок 25. Каждая лебедка 25 систем 23 хранения снабжена приводным модулем 26, который вынуждает канат 4 правильно наматываться на соответствующую ему лебедку 25.
Таким образом, канаты 4 представляют собой соединительный и передающий усилие элемент между кайтами 2 и модулями 5 ветровой системы 1. Когда цепочка 3 кайтов 2 поднимается под действием ветра W, возникает эффект буксирования, который обеспечивает перемещение модуля 5 и соответственно преобразование энергии ветра с электроэнергию посредством генераторов 20 и/или 21. Очевидно, что длина и диаметр каждого каната 4 зависит от режима ветра и надежности, с которой он должен работать.
Ветровая система 1 в соответствии с настоящим изобретением дополнительно содержит по меньшей мере один рельс 6, на котором перемещаются модули 5, буксируемые посредством кайтов. Как было отмечено выше, модули 5 ветровой системы 1 могут перемещаться на множестве рельсов 6 и 7, чтобы распределять вес систем 8 восстановления кайтов 2.
Рельсы 6 и 7 предпочтительно описывают замкнутую траекторию. Простейшей является круговая траектория, однако целесообразно выбирать траекторию так, чтобы оптимизировать использование энергии ветра. Например, если предполагается реализовать ветровую систему 1 в зоне, в которой ветер W дует преимущественно в одном направлении, то целесообразно вынуждать модули 5 ветровой системы 1 описывать эллиптическую траекторию, при этом большая ось эллипса перпендикулярна направлению, в котором дует ветер. Такой выбор продиктован тем, что передвижение модулей 5 ветровой системы 1 посредством кайтов 2 осуществляется посредством использования составляющей подъемной силы, которая возникает тогда, когда ветровые течения наталкиваются на кайты 2, как более подробно описано ниже.
Если рельсы 6 и 7 описывают замкнутую траекторию, то модули 5 ветровой системы 1 подвергаются воздействию центробежной радиальной силы, обусловленной движением модулей 5 и радиальной составляющей тяги цепочки 3 кайтов 2. Для того чтобы противодействовать такой силе, может быть целесообразно соответствующим образом наклонять рельсы 6 ветровой системы 1 (не показано в чертежах). Наклон рельса 6 может быть легко определен посредством разложения сил, которые действуют на колеса 16 модулей 5. Очевидно, если модули 5 ветровой системы 1 перемещаются на множестве рельсов 6 и 7, такие рельсы 6 и 7 должны быть параллельными и концентрическими.
Предпочтительно, рельсы 6 и 7 расположены не на земле, а удерживаются поднятыми посредством опор. При удерживании модулей 5 на соответствующей высоте отсутствует риск скольжения кайтов 2 по земле, если кайты 2 случайно падают. Конструкции, поддерживающие рельсы 6 и 7, должны обладать большой инерцией, чтобы обеспечивать высокую устойчивость и геометрическую точность, требуемую тележками 11 ветровой системы 1.
Как было отмечено выше, если ветровая система 1 содержит множество рельсов 6 и 7, то целесообразно размещать рельсы 6 на разных высотах, чтобы поддерживать системы 8 восстановления наклоненными относительно земли по направлению к цепочкам 3 кайтов 2. Это уменьшает сопротивление, оказываемое на канаты 4 системами 8 восстановления, когда ветровая система 1 приводится в действие.
Рельсы 6 и 7, которыми снабжена ветровая система 1, могут быть разделены на группы - основные рельсы 6 и вспомогательные рельсы 7. Основные рельсы 6 представляют собой рельсы, на которых перемещаются тележки 11 модулей 5 ветровой системы 1. Вспомогательные рельсы 7 представляют собой направляющие, на которых подрессоренные колеса 17 перемещаются и способствуют поддержке веса систем 8 восстановления кайтов 2.
Рельсы 6 и 7 ветровой системы 1 настоящего изобретения могут быть классическими или магнитными, в зависимости от того как перемещаются модули 5 ветровой системы - только посредством колес 16, 17 или посредством магнитной левитации. В частности, вспомогательные рельсы 7 предпочтительно классического типа, а основные рельсы 6 могут быть также магнитными.
Классические основные рельсы 6 имеют такую форму, что они «охватывают» нижнюю часть тележек 11, которые перемещаются на них. Как будет более подробно описано ниже, тележки 11 модулей 5 ветровой системы 1, которые перемещаются на классических рельсах 6, снабжены тремя группами колес 16. Сосредоточивая внимание на одном модуле 5, группа колес 16 должна выдерживать основную часть веса модуля 5 в вертикальном направлении; две другие группы колес 16 способствуют предотвращению переворачивания модуля 5 под действием центробежной силы. Классические основные рельсы 6 реализованы так, чтобы позволять колесам 16 катиться по двум горизонтальным плоскостям (нижней плоскости и верхней плоскости) и по вертикальной плоскости. Для такой цели, сечение рельсов 6 принимает, например, вид двух обращенных друг к другу C-образных элементов рядом с ее вогнутой частью, как показано в частности на фиг. 12. У вспомогательных рельсов такая конфигурация необязательна, если они исключительно классического типа, функция которых состоит только в обеспечении поддержки систем 8 восстановления кайтов 2. Подрессоренные колеса 17 фактически катятся по одной плоскости, а рельсы 7 представляют собой обычные направляющие.
В качестве альтернативы конфигурации из двух С-образных элементов, можно также сделать классические основные рельсы 6, которые имеют, например, прямоугольное сечение и разместить группы колес 16 тележек 11 модулей 5 ветровой системы 1 таким образом, чтобы охватывать рельс 6 (не показано в чертежах).
Другой альтернативный вариант осуществления состоит в переворачивании в направлении верх-низ рельса 6 относительно колес 16, то есть колеса соединить с землей, а рельс буксировать посредством кайтов 2, чтобы размещать на неподвижной части все генераторы переменного тока, закрепленные на колесах (не показано в чертежах). Преимущество такого варианта осуществления состоит в простом электрическом соединении без необходимости коллектора или скользящих контактов.
В случае использования классических основных рельсов 6, как более подробно описано ниже, преобразование энергии может осуществляться, например, посредством генераторов 20, приводимых в действие непосредственно вращением колес 16. Однако в случае выдачи больших мощностей посредством каждого модуля 5, классические рельсы 6 не могут быть пригодными для обеспечения приведения в действие генераторов 20 посредством вращения колес 16. Вращающий момент, который должен передаваться генераторам 20, может быть по существу слишком большим, чтобы создаваться просто использованием трения качения между рельсом 6 и колесами 16, и сопротивление качению может быть таким, чтобы обеспечивать скольжение колес 16 на рельсе 6. В таком случае, для того чтобы все-таки генерировать ток, не прибегая к линейным двигателям, используемым реверсивно, чтобы избежать рассеивания и обеспечить преобразование механической энергии в электроэнергию, можно снабдить классический рельс 6 по меньшей мере одной рейкой 15, с которой по меньшей мере одно зубчатое колесо 18 входит в зацепление и непосредственно приводит в действие генератор 21. Как более подробно описано ниже, в таком случае колеса 16 тележек 11 в основном выполняют опорную функцию. Рейка 15 размещается на классическом рельсе 6 так, чтобы ее зубчатая поверхность была перпендикулярна поверхности рельса 6 и направлена к центру замкнутой траектории, описываемой рельсами 16. Зубчатое колесо 18, которое входит в зацепление с и вращается на рейке 15, расположено горизонтально и, благодаря данной конфигурации, противодействует центробежной силе. Таким образом, центробежная сила, которая действует на каждый модуль 5, используется (и одновременно противопоставляется) для обеспечения удобного раскручивания зубчатого колеса 18 на рейке 15.
В случае использования магнитной левитации, основные рельсы 6 снабжают электромагнитами и выполняют так, чтобы обеспечивать магнитную подвеску и/или преобразование энергии посредством линейных двигателей, используемых реверсивно для генерирования электроэнергии, как более подробно описано ниже. Что касается магнитной левитации, то необходимо напомнить, что в настоящее время могут быть использованы три технологии:
- электромагнитная подвеска: левитация достигается посредством использования обычных электромагнитов (возможно охлаждаемых в их точке сверхпроводимости), размещенных на конце пары конструкций тележки 11, которые намотаны на стороны и нижнюю часть рельса 6. Магниты притягиваются к рельсу 6 и таким образом они поддерживают тележку 11;
- электродинамическая подвеска: левитация достигается посредством использования электромагнитов, охлаждаемых в их точке сверхпроводимости, размещенных на тележке 11. Рядом с боковыми стенками рельса 6, предусмотрены обмотки в виде восьмерки, в которых магнитное поле, создаваемое посредством обмоток полупроводника, размещенных на тележке 11, наводит токи, под действием которых противоположные магнитные полюса получаются рядом с каждой половиной «восьмерки». Магнитные полюса на более высоком уровне притягивают магнитное поле полупроводников тележки 11, магнитные полюса на более низком уровне отталкивают их. Такое сочетание притяжения и отталкивания позволяет тележке 11 подниматься в воздух;
- подвеска посредством постоянных магнитов: левитация достигается посредством размещения постоянных магнитов на тележке 11 и отключения питания электромагнитов на рельсе 6. Когда тележка находится в движении, постоянные магниты наводят в электромагнитах рельса 6 токи, которые генерируют отталкивающее магнитное поле относительно поля, создаваемого постоянными магнитами. Такое отталкивание вынуждает тележку 11 подниматься в воздух.
В ветровой системе 1 в соответствии с настоящим изобретением, в случае использования магнитной левитации, используемая технология предпочтительно представляет собой технологию, которая обеспечивает магнитную подвеску посредством постоянных магнитов, которая может суммироваться с потоком, создаваемым сверхпроводящими соленоидами. Конфигурация магнитов и электромагнитов на рельсе 6 и на тележках 11 модулей 5 и принцип достижения магнитной левитации будут более подробно описаны ниже совместно со способами, которыми достигается преобразование энергии и соответственно генерирование тока.
Как более подробно описано ниже, даже в случае использования магнитной левитации, желательно снабжать тележки 11 модулей 5 ветровой системы 1 колесами 16, которые способствуют поддержанию воздушного зазора между магнитами модулей 5 и рельсов 6. Колеса 16, которые используются исключительно для поддержания воздушного зазора, подобны, например, вышеупомянутым трем группам колес 16 тележек 11, которые перемещаются на классических основных рельсах 6. В случае использования магнитной левитации, основной рельс 6 может представлять собой сочетание вышеописанного классического рельса (с двойной С-образной конфигурацией или с альтернативной конфигурацией) и магнитного рельса.
Таким образом, каждый модуль 5 ветровой системы 1 снабжен по меньшей мере одной тележкой 11, посредством которой модуль 5 перемещается на по меньшей мере одном рельсе 6. В частности, как уже было отмечено выше, модуль 5 может быть снабжен одной тележкой 11, на которой размещены как генераторы 20 и/или 21, так и элементы для приведения в движение кайтов 2 и хранения канатов 4. Второй вариант осуществления состоит в снабжении каждого модуля 5 двумя тележками 11: одной на большей высоте, содержащей элементы, которые осуществляют преобразование энергии, а другой на меньшей высоте, на которой размещены лебедки 24 и 25, на которые наматываются канаты 4.
Предпочтительно предусмотрены два способа перемещения тележки 11 на рельсе 6:
- в случае использования классического рельса 6, тележка 11 перемещается на рельсе 6 посредством гладких колес 16 и 17;
- в случае использования магнитного рельса 6, тележка 11 перемещается на рельсе 6 посредством постоянных магнитов и/или электромагнитов, используя принцип магнитной левитации.
Если тележка 11 перемещается на рельсе 6 посредством колес 16, то такие колеса 16 соединены с остальной частью модуля 5 ветровой системы 1, например, посредством пружин, подсоединенных параллельно с демпферами. Таким образом, модуль 5 амортизирован к ударным нагрузкам.
Как уже было отмечено выше, колеса 16, которыми снабжена тележка 11, с модулем 5 можно разделить на три группы. Колеса 16, принадлежащие к разным группам, расположены взаимно перпендикулярно в Т-образной конфигурации. В частности, предполагая, что рельсы 6 лежат на горизонтальной плоскости, то имеются:
- колеса 16, катящиеся по горизонтальной плоскости, которые выдерживают основную часть веса тележки 11;
- колеса 16, катящиеся по вертикальной плоскости, которые противодействуют радиальной силе, которая воздействует на тележку 11;
- колеса 11, катящиеся по горизонтальной плоскости, которые предотвращают переворачивание тележки 11.
Благодаря наличию такой системы колес 16, тележка 11 удерживается на основании рельса 6, предотвращая любую возможность схода с рельсов. Такой результат достигается за счет придания классическому рельсу 6 надлежащей формы. В частности, как было отмечено выше, рельс 6 можно выполнить таким образом, что он имеет сечение в виде двух С-образных элементов, так что рельс 6 «охватывает» нижнюю часть тележки 11. В качестве альтернативы, можно использовать обычный рельс, например с прямоугольным сечением, и размещать колеса 16 на тележке 11 так, что упомянутые колеса 16 охватывают рельс 6 (не показано в чертежах).
Независимо от выбранного варианта осуществления, отдельные колеса 16 не непосредственно связаны с плоским основанием тележки 11, а объединены в тележках 19, в свою очередь связанных с упомянутым плоским основанием. Такое решение, используемое также в железнодорожном транспорте, придает системе большую устойчивость.
В случае использования магнитного рельса 6, воздушный зазор между магнитами модуля 5 и электромагнитами рельса 6 очень мал, и поэтому существует высокий риск вхождения в контакт модуля 5 и рельса 6. Это является следствием не только большой массы модулей 5 ветровой системы 1 настоящего изобретения, но и типа и величины усилий, которые воздействуют на такие модули 5. Для того чтобы обеспечить поддержание воздушного зазора, целесообразно также снабдить тележки 11 магнитной левитации колесами 16, которые выполняют исключительно функцию поддержки модуля 5 без совмещения с генерированием электроэнергии. Такие колеса 16 могут быть, например, подобны колесам, при помощи которых тележка 11 перемещается на классическом рельсе 6. Как было отмечено выше, в случае использования магнитной левитации, рельс 6, на котором перемещаются модули 5, может представлять собой сочетание классического рельса и магнитного рельса.
Помимо поддержания воздушного зазора, использование опорных колес 16 может быть все равно необходимо в случае использования подвески для постоянных магнитов в виде технологии магнитной подвески. При применении данной технологии, отталкивающее магнитное поле может быть создано по существу только в условиях движения и поэтому, в соответствии с таким предположением, при неподвижном модуле 5 левитация невозможна. Наличие опорных колес 16 гарантирует, что даже при отсутствии левитации модули 5 и рельс 6 не будут входить в контакт. Условия для возможного принудительного перемещения модуля 5 без магнитной подвески дополнительно улучшаются.
Системы 8 восстановления представляют собой элементы модулей 5 ветровой системы 1, используемые для восстановления кайтов 2 в состоянии покоя. Ветровая система 1 оснащена одной системой 8 восстановления для каждого модуля 5. Система восстановления предпочтительно выполнена в виде по меньшей мере одной цилиндрической трубы, предназначенной для размещения в ней всей цепочки 3 кайтов 2. Поэтому системы 8 восстановления относятся к числу самых сложных и тяжелых элементов ветровой системы 1. Системы 8 восстановления могут быть приспособлены для гравитационного противодействия, посредством своего собственного веса, вертикальной составляющей тяги кайтов 2. Хотя вертикальная составляющая тяги кайтов 2 способствует удерживанию веса систем 8 восстановления, целесообразно выполнять модули 5 ветровой системы 1 так, чтобы предотвращать переворачивание модулей 5 под весом систем 8 восстановления. Эта необходимость обусловлена также и тем, что вертикальная составляющая тяги кайтов 2 имеет место только тогда, когда ветровая система 1 приводится в действие. Если же ветровая система 1 находится в состоянии покоя, то весь вес систем 8 восстановления приходится на рельсы 6.
В случае использования отдельной тележки 11 для каждого модуля 5, система 8 восстановления прикреплена к тележке 11 рядом с концом, из которого выходят канаты 8, направляющиеся к кайтам 2. Для того чтобы предотвратить переворачивание модуля 5 под действием системы 8 восстановления, вес такой системы 8 поддерживается посредством растянутой гибкой структуры 12 и, возможно, подрессоренных колес 17, соединенных с системой 8 восстановления, которые перемещаются на вспомогательных рельсах 7.
Если модули 5 ветровой системы 1 снабжены двумя тележками 11 для каждого модуля 5, то система 8 восстановления прикреплена к таким тележкам 11 рядом с концом. Таким образом, самый внутренний рельс 6 расположен на меньшей высоте, так что система 8 восстановления надлежащим образом наклонена, чтобы минимизировать сопротивление канатов 4, когда ветровая система 1 приводится в действие. В частности, системы 8 восстановления наклонены вверх относительно горизонтальной плоскости (как показано в частности на фиг. 6 и 11). Такой наклон реализован также в случае использования отдельной тележки 11 для каждого модуля 5, например, посредством размещения на уменьшающихся высотах вспомогательных рельсов 7, на которых перемещаются подрессоренные колеса 17, поддерживающие систему 8 восстановления.
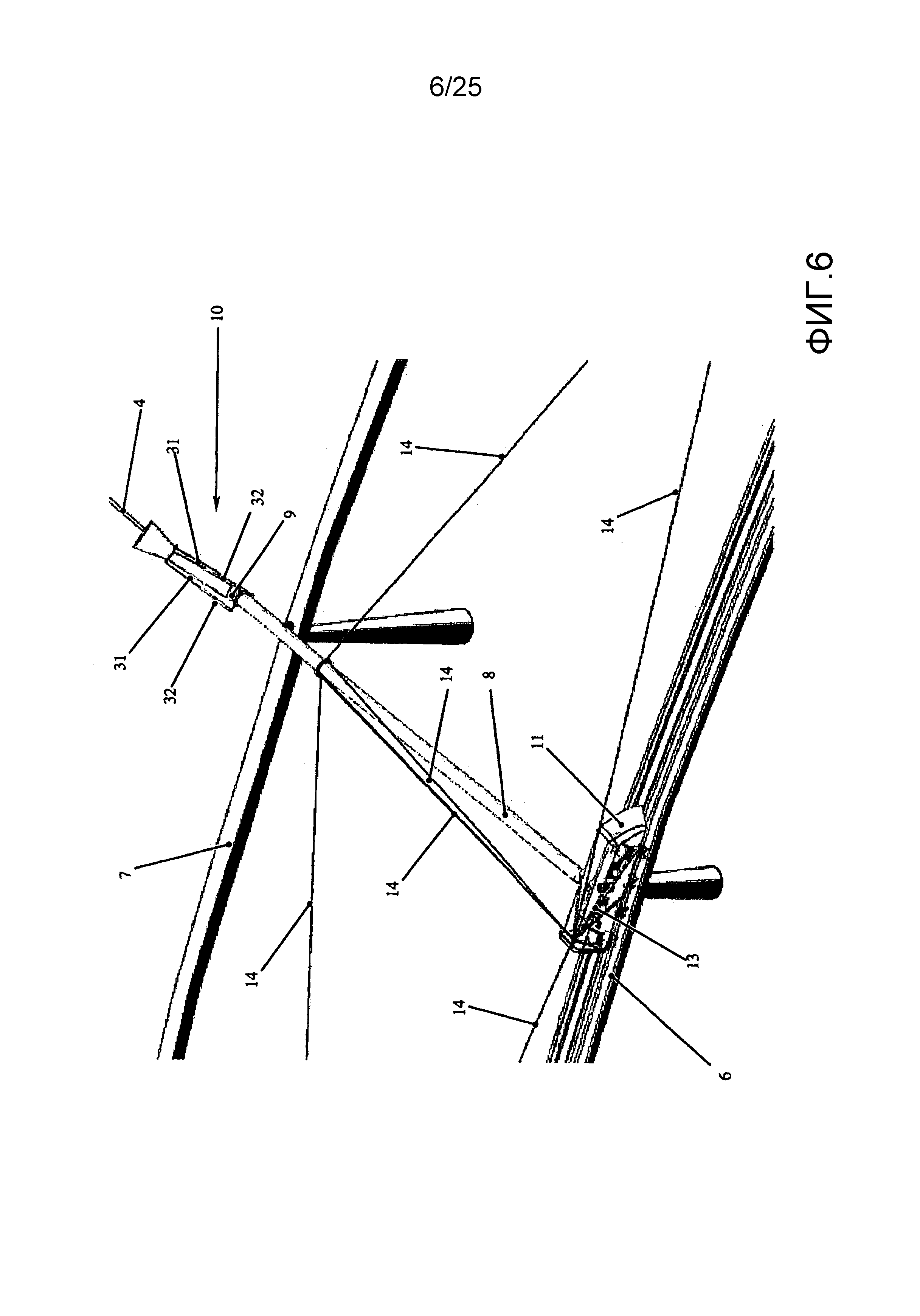
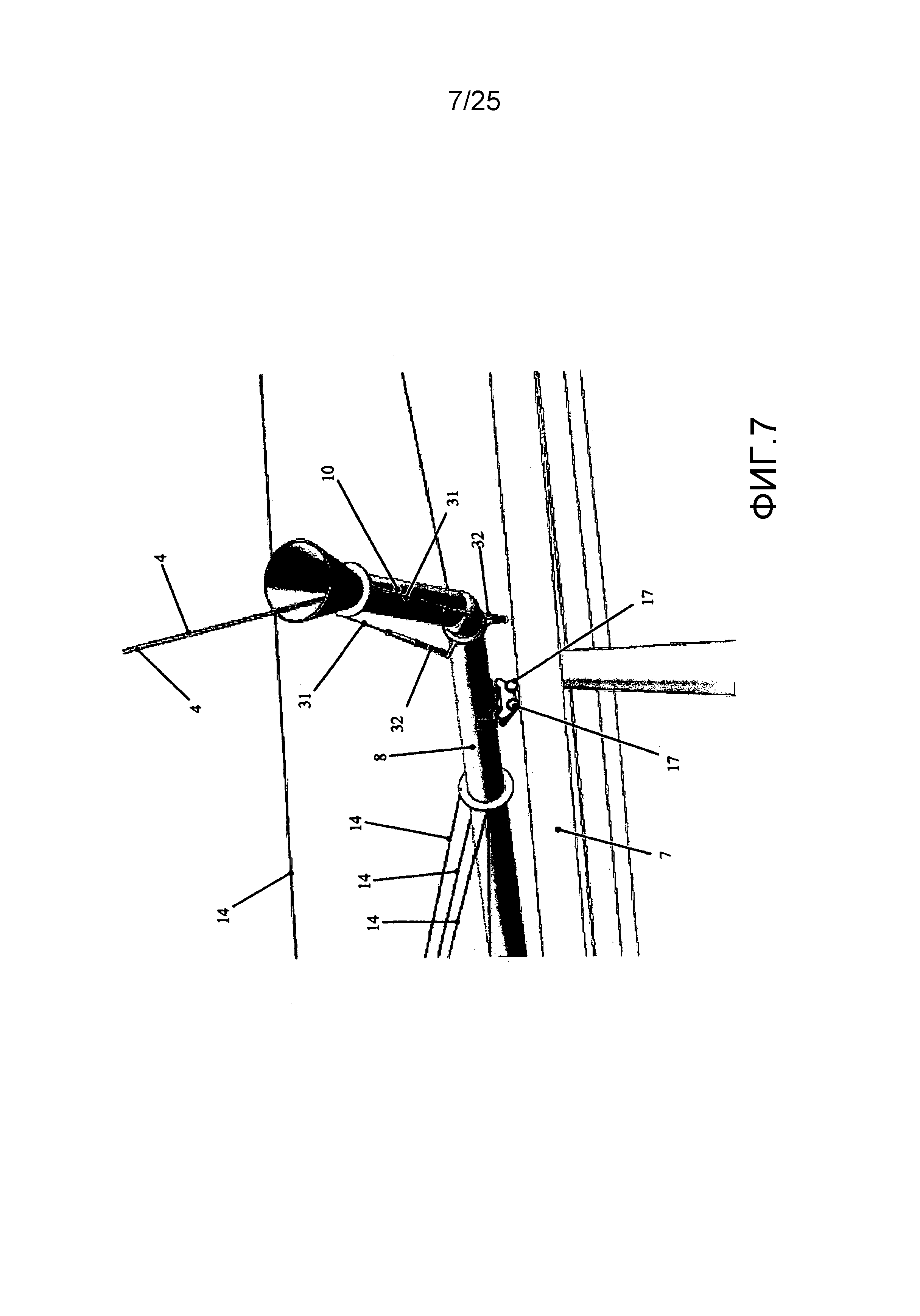
Независимо от использования одной или двух тележек 11 для каждого модуля 5, концевая часть 10 систем 8 восстановления реализована с возможностью ориентирования как в горизонтальной плоскости, так и в вертикальной плоскости. Это позволяет облегчить операции восстановления и выталкивания кайтов 2 и частично демпфирование скачков силы. В частности, посредством увеличения наклона концевой части 10 систем 8 восстановления относительно горизонтальной плоскости во время операции выталкивания кайтов 2, можно размещать верхний конец систем 8 на высоте, что значительно изменяет, посредством его удлинения, необходимое время для стабилизации кайтов 2 во время запуска, при этом кайты 2 стартуют с большей высоты. Во время операций восстановления кайтов 2, концевая часть 10 системы 8 восстановления выравнивается с остальной частью системы 8, чтобы облегчить выполнение такой операции.
Возможность ориентирования концевой части 10 системы 8 восстановления обеспечивается, например, посредством образования по меньшей мере одного шарнирного соединения 8 рядом с верхним концом системы 8 и приведения в движение концевой части 10 относительно упомянутого шарнирного соединения 9 посредством системы из трех канатов 31, каждый прикрепленный к по меньшей мере с одному гидроцилиндру 32, поворотно прикрепленному к системе 8 восстановления рядом с шарнирным соединением 9. Эти гидроцилиндры 32 приводятся в движение посредством гидравлической системы, приводимой в действие посредством интеллектуальной системы управления. В качестве альтернативы гидроцилиндрам 32 можно использовать линейные электромеханические блоки (не показанные в чертежах).
Если модули 5 ветровой системы 1 снабжены двумя тележками 11 для каждого модуля 5, то тележка 11, расположенная рядом с выходным краем системы 8 восстановления, прикреплена к той части системы, которая не приспособлена для ориентирования, выше по потоку от шарнирного соединения 9.
Если ветровая система 1 в соответствии с настоящим изобретением снабжена одной тележкой 11 для каждого модуля 5, то возможный вариант осуществления ветровой системы 1 (не показанный в чертежах) предусматривает, что необязательно только концевая часть 10 систем 8 восстановления выполнена с возможностью ориентирования. Шарнирное соединение 9, которое обеспечивает возможность ориентирования, может быть размещено в любой точке системы 8 восстановления или в исходной точке системы 8, обеспечивая возможность ориентирования всей системы 8. Кроме того, в данном варианте осуществления концевая часть 10 систем 8 восстановления может быть приведена в движение, например, посредством системы, содержащей канаты и гидроцилиндры. Если вся системы 8 восстановления выполнена с возможностью ориентирования, то маневр может осуществляться посредством растянутой гибкой структуры 12, которая ее поддерживает.
Для того чтобы облегчить прохождение цепочки 3 кайтов 2 во время их восстановления и запуска, выходной край систем 8 восстановления, предпочтительно, выполнен куполообразным и, рядом с таким выходным краем, концевая часть 10 систем 8 восстановления имеет увеличивающееся сечение, продолжающееся к выходному краю.
Функция предохранения кайтов 2 предполагает, что полость систем 8 восстановления является доступным для операторов для осуществления возможных операций технического обслуживания.
Форма систем 8 восстановления может быть только цилиндрической, однако если оценки аэродинамического сопротивления вращению и прочности конструкции предполагают другой подход, то системы 8 восстановления могут быть выполнены с решетчатой структурой (не показано в чертежах), в которой доступность и удерживание кайтов 2 обеспечивается посредством сетки для заполнения стенок решетки. Минимальная секция решетки треугольная, обеспечивающая необходимое пространство для предохранения кайтов 2 и пропускания канатов 4. Особое переплетение заполняющей сетки исключает возможное застревание при проскальзывании цепочки 3 кайтов 2 во время этапов выталкивания и восстановления.
Внутри каждой системы 8 размещена система, посредством которой осуществляется выталкивание и восстановление кайтов 2, вместе с сопровождающими канатами 4.
Система 2 для восстановления и выталкивания кайтов 2 представляет собой элемент модуля 5 ветровой системы 1, размещенный внутри системы 8 восстановления и посредством которого осуществляется восстановление и запуск кайтов 2, соответственно когда ветровая система 1 останавливается и запускается.
Ветровая система 1 в соответствии с настоящим изобретением может быть снабжена, например, системами восстановления и выталкивания, которыми снабжена ветровая система с консолями и вращающимся валом.
Таким образом, каждая из этих систем восстановления и выталкивания содержит тележку, которая перемещается на двух рельсах, которые вынуждают ее перемещаться внутри соответствующей системы 8 восстановления и параллельно оси такой системы 8. На тележке установлена пара систем выпускных шкивов 35 канатов 4. В случае использования одного каната 4 в качестве соединительного элемента между модулем 5 ветровой системы 1 и цепочкой 3 кайтов 2, на упомянутой тележке установлена одна система выпускных шкивов 35 каната 4.
При восстановлении цепочки 3 кайтов 2, когда кайты 2 находятся рядом с системой 8 восстановления, кайты 2 размещаются параллельно оси системы 8 восстановления (посредством пары канатов 4 и/или спойлеров), чтобы облегчить вход в такую систему 8.
Упрощение запуска и восстановления кайтов 2 может быть достигнуто посредством струй сжатого воздуха, соответственно выдуваемых для выталкивания и перемещения кайтов 2 без необходимости контактов. Устройства для обеспечения таких искусственных напоров ветра (не показанные в чертежах) могут быть размещены по длине систем 8 восстановления и в концевой части 10. Маневры получаются посредством множества точек выдувания, геометрическое положение которых должно обеспечивать очень большое количество степеней свободы, и приводимых в действие посредством интеллектуальной системы управления, чтобы реализовать устройство точного и быстрого перемещения.
Упомянутые устройства искусственного напора ветра способны облегчить восстановление цепочки 3 кайтов 2. Посредством таких устройств по существу можно создавать искусственные воздушные потоки, посредством которых обеспечивается управляемость кайтами 2, когда упомянутые кайты 2 расположены рядом с системами 8 восстановления.
Запуск кайтов 2 требует по меньшей мере наличия легкого ветра на уровне земли. В случае недостаточного ветра на малых высотах, приводятся в действие двигатели 20, упомянутые ниже, чтобы запускать модули 5 ветровой системы 1, чтобы искусственно создавать легкий ветер, который позволяет кайтам 2 подниматься.
Ветровая система 1 снабжена системой восстановления и выталкивания кайтов 2 рядом с каждым модулем 5.
Альтернативное решение по восстановлению кайтов 2 состоит в размещении систем 8 восстановления не на борту модулей 5 ветровой системы 1, а на земле. Такое решение обеспечивает большие преимущества. Прежде всего, каждый модуль 5 ветровой системы 1 снабжен одной тележкой 11 (поскольку внешняя тележка, приспособленная для поддержки системы 8 восстановления, больше не требуется), и ветровая система соответственно будет содержать один рельс 6. Другое преимущество состоит в том, что инерция каждого модуля 5 значительно уменьшается относительно решения с системами 8 восстановления, объединенными с модулями 5, и поэтому уменьшается энергия, расходуемая при запуске ветровой системы 1. И наконец, улучшается аэродинамика тележек ветровой системы 1, поскольку отсутствует аэродинамическое трение, обусловленное системами 8 восстановления. Это позволяет повысить эффективность преобразования энергии при той же энергии ветра, извлекаемой посредством кайтов 2.
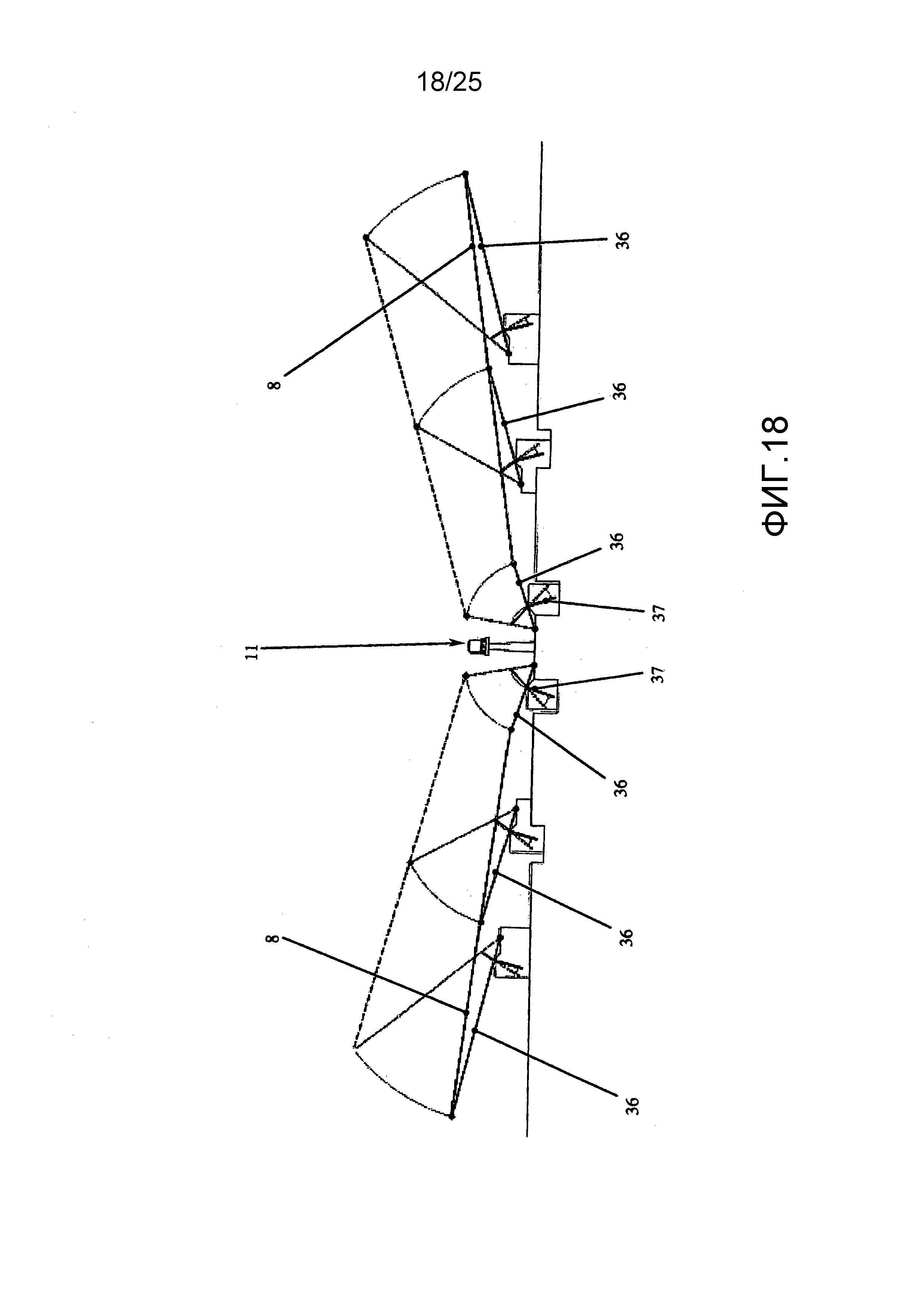
Системы 8 восстановления на земле могут представлять собой, например, контейнеры с поворотной крышкой, размещенные рядом с землей. Упомянутые контейнеры имеют форму, приспособленную для размещения по меньшей мере одной цепочки 3 кайтов 2. Системы 8 восстановления расположены радиально в горизонтальной плоскости и могут быть размещены внутри и за пределами замкнутой траектории, определяемой рельсом 6. Что касается наклона систем 8 восстановления относительно земли, во время операций восстановления и запуска кайтов 2, системы 8 восстановления наклонены вверх (чтобы облегчать такие операции), а в остальной период времени системы 8 восстановления расположены почти горизонтально. В частности, каждая система 8 восстановления выполнена с возможностью осуществления двух перемещений: вращательно-поступательного перемещения и перемещения для укрытия.
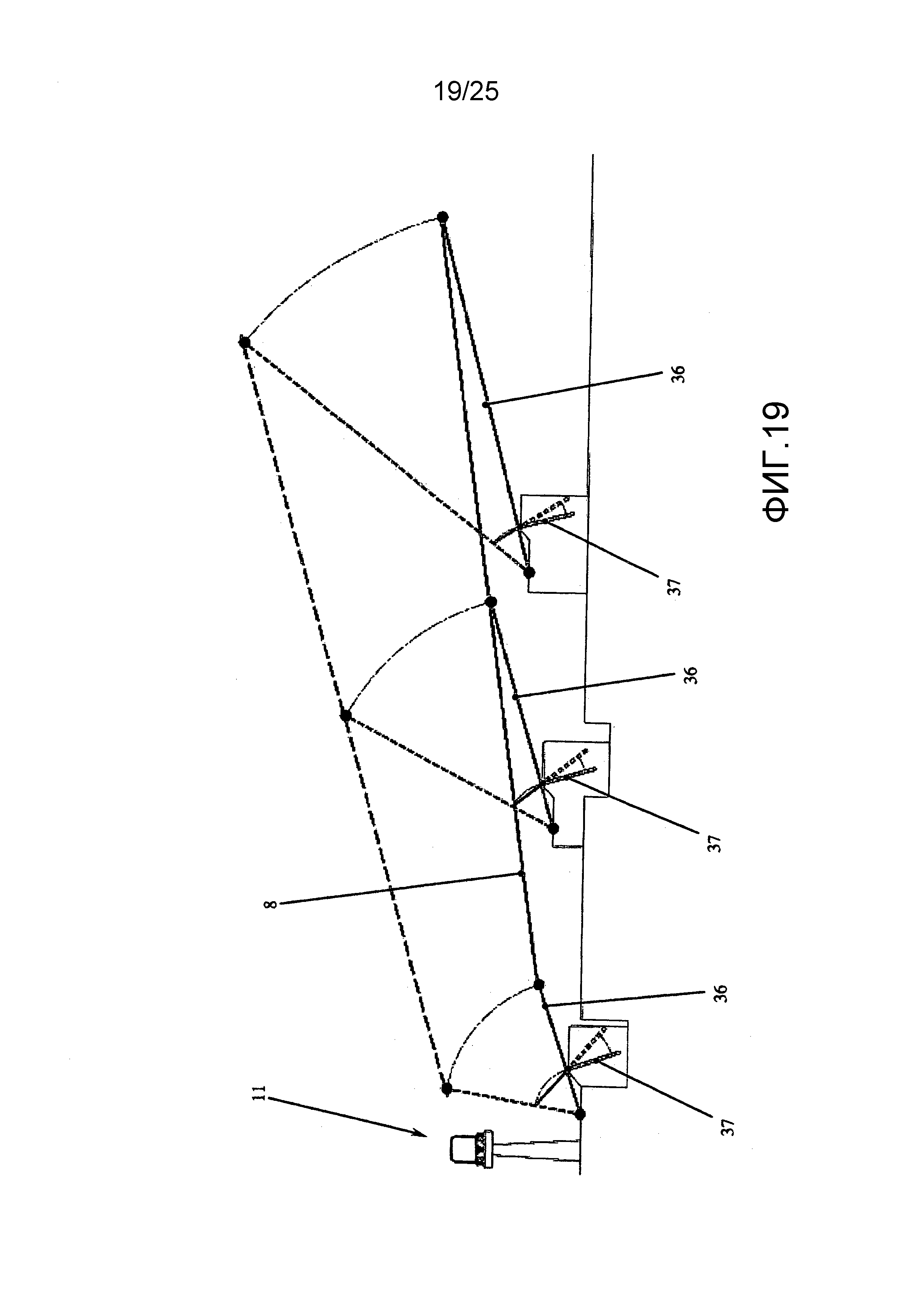
Вращательно-поступательное перемещение состоит в подъеме системы 8 восстановления при соответствующем наклоне ее вверх. Каждая система 8 восстановления перемещается посредством расположенных сбоку линейных приводов 37. Такие приводы 37 расположены на обеих сторонах системы 8 восстановления и поворотно закреплены как на земле, так и к конструкциям, которые могут быть образованы посредством штанг 36, в свою очередь поворотно закрепленным рядом с заземленным концом и корпусом 38 системы 8 восстановления (как показано на фиг. 18 и 19). Посредством приведения в действие приводов 37 можно поднимать и наклонять систему 8 восстановления, выводя ближайший конец рельса 6 на ту же высоту, на которой находится упомянутый рельс 6, и выводя другой конец на большую высоту. Линейные приводы 37 представляют собой, например, гидроцилиндры, приводимые в движение посредством гидравлической системы, приводимой в действие посредством интеллектуальной системы управления. В качестве альтернативы гидроцилиндрам, можно использовать электромеханические линейные блоки. Вращательно-поступательное перемещение осуществляется при запуске и остановке ветровой системы 1, чтобы соответственно облегчать операции подъема и восстановления кайтов 2.
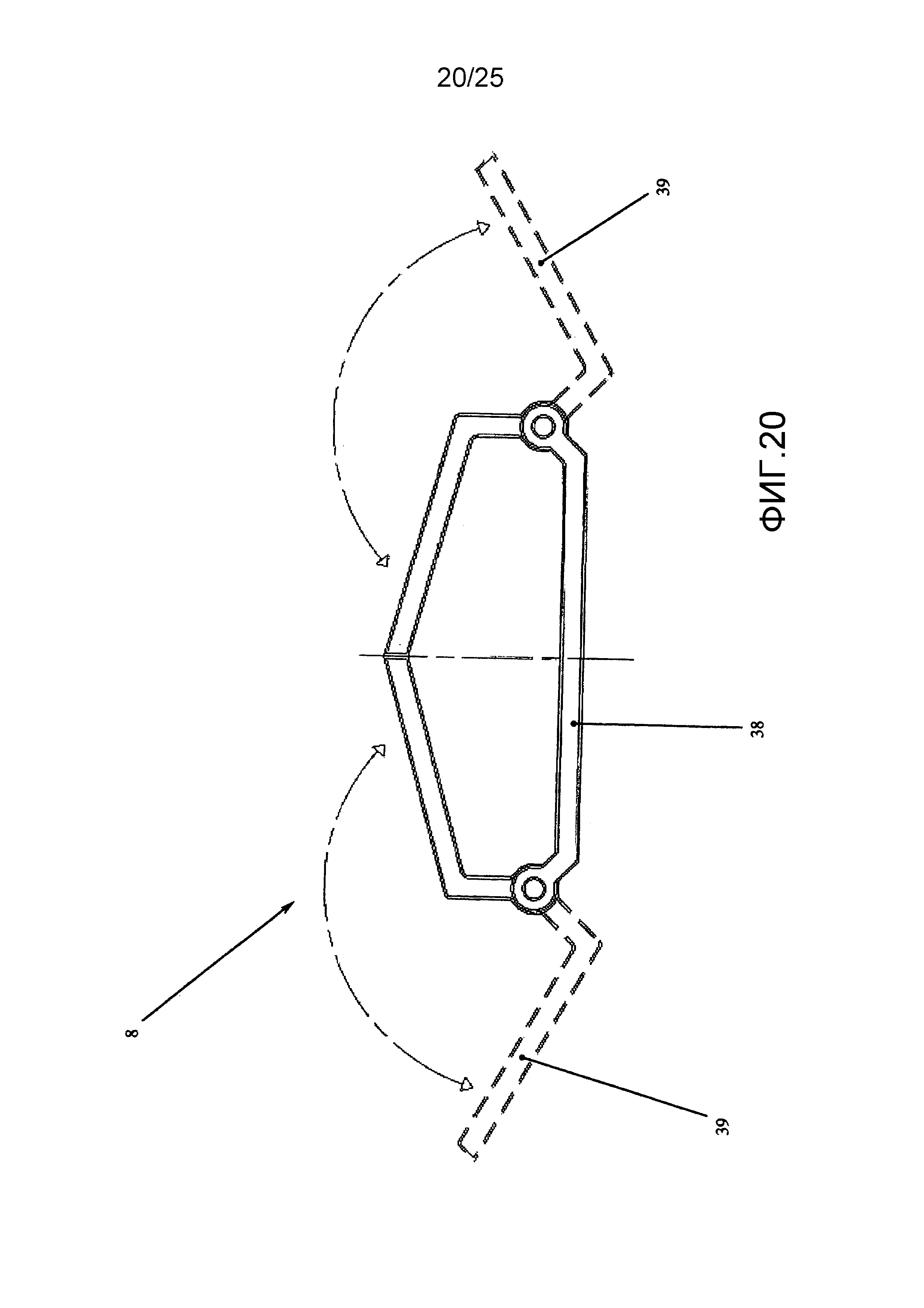
Упомянутое перемещения для укрытия состоит в раскрытии системы 8 восстановления так, что такая система 8 превращается в платформу, приспособленную для укрытия по меньшей мере одной цепочки 3 кайтов 2. Как уже было отмечено выше, системы 8 восстановления на земле могут представлять собой, например, контейнеры с поворотной крышкой и соответственно имеют другую структуру относительно решения с системами 8 восстановления на борту модулей 5 ветровой системы 1. Во-первых, поскольку система 8 восстановления должна быть раскрыта наподобие платформы, наилучшей формой, которую следует придавать таким системам 8 восстановления, уже не является форма цилиндрической трубы. Кроме того, наземные системы восстановления уже не содержат концевую часть 10, выполненную с возможностью ориентирования, и внутри них отсутствует тележка системы восстановления и выталкивания. Каждая система 8 восстановления продольно разделена на части так, чтобы состоять, например, из трех частей 38 и 39. Как показано в частности на фиг. 20, две части 39 образуют крышку системы 8 восстановления, выполненную с возможностью открытия, а третья часть 38 представляет собой корпус контейнера системы 8 восстановления. Корпус 38 системы 8 восстановления расположен так, что углубление ориентировано вверх, и другие две части 39 поворотно прикреплены к корпусу 38 так, чтобы образовать конструкцию, приспособленную для раскрытия и закрытия, вынуждая систему 8 восстановления принимать вид платформы. Раскрытие контейнеров 8 в виде платформы осуществляется при запуске и остановке ветровой системы 1, то есть соответственно чтобы запускать и восстанавливать кайты 2. После завершения операций запуска или восстановления, системы 8 восстановления опять закрываются.
Подобно вращательно-поступательному перемещению, перемещение для укрытия осуществляется также, например, посредством линейных приводов (не показанных в чертежах). Такие приводы могут представлять собой гидроцилиндры, приводимые в движение посредством гидравлической системы (или линейных электромеханических блоков), приводимых в действие посредством интеллектуальной системы управления.
Со ссылкой опять же на вариант ветровой системы 1, в котором системы 8 восстановления расположены на земле, могут быть использованы два решения. Первое решение состоит в обеспечении ветровой системы 1 двумя системами 8 восстановления для каждого модуля 5 (и соответственно для каждой цепочки 3 кайтов 2); второе решение состоит в использовании меньшего количества систем 8 восстановления по сравнению с количеством модулей 5 ветровой системы 1.
Если ветровая система 1 снабжена двумя системами 8 восстановления для каждого модуля 5, то каждая цепочка 3 кайтов 2 содержит два доступных контейнера, в которых она может быть восстановлена: один, расположенный внутри замкнутой траектории, описываемой рельсом 6, и другой, расположенный за пределами такой траектории. При использовании такого решения, цепочка 3 кайтов 2 может быть восстановлена в системе 8 восстановления или в другой системе в соответствии тем, как позволяет ветер W.
Если же ветровая система 1 снабжена несколькими системами 8 восстановления, количество которых меньше по сравнению с количеством модулей 5, то системы 8 восстановления могут быть размещены без разницы внутри или за пределами замкнутой траектории, описываемой рельсом 6, и каждая система 8 восстановления предназначена для укрытия больше чем одной цепочки 3 кайтов 2. Поэтому в данном случае канаты 4 для приведения в движение кайтов 2 снабжены автоматической системой соединения и отсоединения (не показанной в чертежах), посредством которой канаты 4 могут быть реверсивно соединены и отсоединены с/от цепочек 3 кайтов 2. Благодаря такой автоматической системе, цепочка 3 кайтов 2 восстанавливается только тогда, когда она находится рядом с системой 8 восстановления, и ветровой режим благоприятный. Когда восстановление завершается, канаты 4, которые соединяют модуль 5 с соответствующей цепочкой кайтов 2, отсоединяются от данной цепочки 3 кайтов 2, чтобы обеспечить возможность продвижения модулей 5 и восстановления цепочки 3 кайтов 2 следующего модуля 5. Аналогично, посредством упомянутой автоматической системы соединения и отсоединения, канаты 4 снова подсоединяются к цепочке 3 кайтов 2 после запуска ветровой системы, после подъема кайтов 2. Очевидно, автоматическая система для соединения и отсоединения канатов 4 является лишней, если ветровая система 1 снабжена двумя системами 8 восстановления для каждого модуля 5, поскольку в таком случае каждая тележка 11 ветровой системы 1 остается связанной с соответствующей цепочкой 3 кайтов 2 даже если ветровая система 1 находится в состоянии покоя. Для того чтобы система 8 восстановления могла укрывать множество цепочек 3 кайтов 2, необходимо дополнительно обеспечить каждую систему 8 восстановления автоматической системой хранения (не показанной в чертежах), посредством которой можно восстанавливать или запускать одну за другой множество цепочек 3 кайтов 2 и размещать в соответствующем порядке цепочки 3 кайтов 2 внутри системы 8 восстановления. Такая автоматическая система хранения состоит, например, из перемещающих полок, перемещаемых посредством ремней и приводимых в движение посредством интеллектуальной системы управления. Полки перемещаются, оставаясь параллельными и описывая замкнутую траекторию, чтобы обеспечивать быстрое чередование операций приземления, хранения и запуска цепочек 3 кайтов 2.
По аналогии с решением, отличающимся размещением систем 8 восстановления на борту модулей 3 ветровой системы 1, облегчение подъема и восстановления кайтов 2 может быть обеспечено посредством струй сжатого воздуха, выпускаемых соответственно для выталкивания и перемещения кайтов 2 без необходимости контактов. Устройства для получения такого искусственного напора ветра размещаются по длине систем 8 восстановления, и управление маневрами осуществляется посредством интеллектуальной системы управления, чтобы реализовать устройство точного и быстрого перемещения. Упомянутые устройства искусственного напора ветра могут способствовать восстановлению цепочки 3 кайтов 2. Посредством данных устройств фактически можно создавать искусственные воздушные потоки, посредством которых обеспечивается управляемость кайтов 2, когда кайты 2 находятся рядом с системами 8 восстановления.
В случае наземных систем 8 восстановления можно размещать убирающуюся направляющую систему (не показанную в чертежах) рядом с концом системы 8 восстановления, посредством которой цепочка 3 кайтов 2 проходит с возможностью опоры на платформу. Такая убирающаяся направляющая система должна облегчать приземление цепочки 3 кайтов 2 на систему 8 восстановления и состоит, например, из пары штанг, расположенных на сторонах системы 8 восстановления и перед ней. Упомянутые штанги поднимаются практически в вертикальное положение в моменты, предшествующие этапу приземления, чтобы сдерживать возможное ослабление цепочки 3 кайтов и направлять ее к системе 8 восстановления, раскрытой в виде платформы. Такая убирающаяся направляющая система также приводится в действие посредством интеллектуальной системы управления.
Таким образом, при размещении систем 8 восстановления кайтов 2 на земле, если предположить, что ветровая система 1 снабжена двумя системами 8 восстановления для каждой цепочки 3 кайтов 2, то операция восстановления осуществляется следующим образом:
- канаты 4, соединяющие цепочку 3 кайтов 2 с тележками 11 ветровой системы 1, сматываются, чтобы удерживать цепочки 3 кайтов 2 рядом с тележками 11;
- убирающиеся направляющие системы приводятся в действие и, посредством вращательно-поступательного перемещения и перемещения для укрытия, системы 8 восстановления поднимаются, наклоняются вверх и раскрываются в виде платформ;
- движение модулей 5 ветровой системы 1 прекращается и, при помощи устройств искусственного напора ветра, цепочки 3 кайтов 2 одна за другой укладываются на соответствующие платформы, внутри или за пределами замкнутой траектории, описываемой рельсом 6; и
- системы 8 восстановления опять закрываются и принудительно вращаются-перемещаются так, чтобы быть размещенными рядом с землей.
Если каждая система 8 восстановления предназначена для укрытия множества цепочек 3 кайтов 2, то операция восстановления осуществляется не одновременно для всех цепочек 3 кайтов 2. Движение ветровой системы прекращается, чтобы обеспечить приземление некоторого количества цепочек 3 кайтов 2, равного количеству систем 8 восстановления. Затем, посредством автоматической системы соединения и отсоединения, канаты 4 отсоединяются от приземлившихся цепочек 3 кайтов 2, и автоматическая система хранения восстанавливает цепочки 3 кайтов 2, освобождая платформы для приземления других кайтов 2. Ветровая система 1 снова приводится в действие, и модули 5, отсоединенные от цепочек 3 кайтов 2, продолжают перемещение на рельсе 6, чтобы обеспечить возможность восстановления цепочек 3 кайтов 2 следующих модулей 5. После того как все цепочки 3 кайтов 2 восстановлены в соответствующих контейнерах, системы 8 восстановления опять закрываются и опускаются так, чтобы быть расположенными рядом с землей.
Запуск кайтов осуществляется посредством упомянутой последовательности операций, но выполняемых в обратном порядке. Со ссылкой опять же на случай, в котором каждая система 8 восстановления предназначена для укрытия одной цепочки 3 кайтов 2, системы 8 восстановления поднимаются, наклоняются вверх и раскрываются в виде платформы. Затем приводятся в действие устройства искусственного напора ветра, чтобы выталкивать цепочки 3 кайтов 2, и модули 5 ветровой системы 1 продвигаются на рельсе 6 за счет двигателей 20, управляемых интеллектуальной системой управления, создающие на уровне цепочек 3 кайтов 2 легкий ветер, который позволяет кайтам 2 подниматься.
Если же каждая система 8 восстановления предназначена для укрытия множества цепочек 3 кайтов 2, то по аналогии с этапом приземления, этап запуска осуществляется также одновременно для всех цепочек 3 кайтов 2. В этом случае, после того как системы 8 восстановления подняты, наклонены вверх и раскрыты в виде платформы, посредством автоматической системы соединения и отсоединения канаты 4 соединяются с цепочками 3 кайтов 2, которые должны подниматься. После подъема кайтов 2, модули 5, соединенные с цепочками 3 кайтов 2, продвигаются на рельсе 6, чтобы обеспечить возможность подсоединения цепочек 3 кайтов 2 к следующим модулям 5. После того как все цепочки 3 кайтов 2 осуществили свой подъем, системы 8 восстановления опять закрываются и опускаются так, чтобы быть расположенными рядом с землей.
Ветровая система 1 в соответствии с настоящим изобретением дополнительно содержит по меньшей мере одну систему передачи.
Системы передачи представляют собой элементы модулей 5 ветровой системы 1, которые приводят в движение канаты 4 между кайтами 2 и системами 22 для наматывания и разматывания канатов 4. Системы передачи состоят из шкивов, установленных на модулях 5 ветровой системы 1.
Каждый модуль 5 ветровой системы 1 снабжен системой передачи, в которой предпочтительно предусмотрены два ряда шкивов, по одному для каждого из двух канатов 4, посредством которых приводятся в движение кайты 2. В случае использовании одного каната 4 в качестве соединительного элемента между модулем 5 ветровой системы 1 и кайтами 2, каждый модуль 5 снабжен одним рядом шкивов.
Шкивы, содержащиеся в каждой системе передачи, могут быть разделены на четыре группы:
- шкивы 35, установленные на тележке системы восстановления и выталкивания кайтов 2;
- неподвижные шкивы 33, прикрепленные непосредственно к модулю 5 ветровой системы 1;
- шкивы, являющиеся частью систем для демпфирования скачков силы канатов 4, упоминаемых ниже;
- шкивы, являющиеся частью системы для фрикционирования канатов 4, упоминаемой ниже;
- шкивы 34, установленные на подвижных элементах приводных модулей 26 канатов 4 (по одному на каждом подвижном элементе 27).
В случае использования двух тележек 11 для каждого модуля 5 ветровой системы 1, исключая шкивы, которыми снабжена система восстановления и выталкивания кайтов 2, другие шкивы 33 расположены на тележке 11 модуля 5, который находится на меньшей высоте. Очевидно, что общее количество шкивов, входящих в состав системы передачи, зависит от размеров тележки 11.
Ветровая система 1 в соответствии с настоящим изобретением дополнительно содержит по меньшей мере одну систему для демпфирования скачков силы канатов 4 (не показана).
Система для демпфирования скачков силы канатов 4 представляет собой элементы ветровой системы 1, которые компенсируют внезапные изменения нагрузки малой величины, которые канаты 4 не в состоянии поглотить. Системы для демпфирования скачков силы расположены между системами 22 для наматывания и разматывания канатов 4 и системой 8 восстановления.
Ветровая система 1 в соответствии с настоящим изобретением может быть снабжена, например, системой для демпфирования скачков силы.
Таким образом, каждая система для демпфирования скачков силы состоит из шкива, соединенного с амортизированным противовесом, поднятым от земли и выполненным с возможностью вертикального перемещения, ограниченного посредством соответствующей направляющей. На шкив намотан канат 4, посредством которого цепочка 3 кайтов 2 приводится в движение таким образом, что натяжение каната 4 поддерживает противовес поднятым. Каждый модуль 5 ветровой системы 1 настоящего изобретения должен быть снабжен по меньшей мере одной системой для демпфирования скачков силы для каждого тягового каната 4, при помощи которого осуществляется приведение в движение кайтов 2.
Ветровая система 1 в соответствии с настоящим изобретением дополнительно содержит по меньшей мере одну систему для фрикционирования канатов 4 (не показана).
Системы для фрикционирования канатов 4 представляют собой элементы ветровой системы 1, которые блокируют канаты 4 при отсутствии нагрузки и способствуют компенсации внезапных изменений нагрузки малой величины, которые канаты 4 не способны демпфировать. Системы для фрикционирования расположены между системами 22 для наматывания и разматывания канатов 4 и системой 8 восстановления.
Системы для фрикционирования, входящие в состав ветровой системы 1 в соответствии с настоящим изобретением, содержат, например, шкив, связанный с прямолинейной направляющей. Параллельно направлению перемещения, задаваемому упомянутой прямолинейной направляющей, размещена амортизированная пружина, которая прикреплена рядом с одним концом к шкиву и рядом с другим концом к тележке 11. На шкив намотан канат 4, посредством которого цепочка 3 кайтов 2 приводится в движение таким образом, что вследствие натяжения каната 4 пружина подвергается сжатию. Если возникает внезапное увеличение нагрузки на канате 4, то такое увеличение нагрузки частично ослабляется посредством сжатия пружины. Однако основная функция, выполняемая такой системой для фрикционирования, состоит в блокировании каната 4 при отсутствии нагрузки. Пружина может быть по существу предварительно нагружена так, что при отсутствии нагрузки на канате 4, сам канат 4 подвергается сжатию посредством пружины между растянутой системой фрикционирования и вторым шкивом.
Каждый модуль 5 ветровой системы 1 настоящего изобретения должен быть снабжен по меньшей мере одной системой фрикционирования для каждого тягового каната 4, посредством которого осуществляется приведение в движение кайтов 2.
Ветровая система 1 в соответствии с настоящим изобретением дополнительно содержит по меньшей мере одну систему 22 наматывания и разматывания канатов 4 (не показана).
Системы 22 для наматывания и разматывания канатов 4 представляют собой элементы модуля 5 ветровой системы 1, расположенные между системами для фрикционирования (или системами для демпфирования скачков силы) и системами 23 хранения канатов 4, упоминаемыми ниже.
Ветровая система 1 в соответствии с настоящим изобретением может быть снабжена, например, системами 22 для наматывания и разматывания канатов 4.
Таким образом, каждый модуль 5 ветровой системы 1 снабжен системой 22 наматывания и разматывания, содержащей две пары из четырех лебедок 24, вокруг которых намотана пара канатов 4 соответствующей цепочки 3 кайтов 2. Каждый канат 4, выходящий из системы фрикционирования, наматывается вокруг четырех соответствующих лебедок 24 системы 22 наматывания и разматывания, после чего он проходит к системе 23 хранения. Системы 22 для наматывания и разматывания представляют собой системы, которые поддерживают все канаты 4 натянутыми.
Четыре лебедки 24, вокруг которых намотан каждый канат, размещены на двух уровнях (две на более высоком уровне и две на более низком уровне) и имеют параллельные оси вращения. Каждый канат 4 в среднем намотан на каждую из этих лебедок 24 примерно на три четверти окружности. Поскольку предусмотрены четыре лебедки 24 для каждого каната 4, общая намотка каната 4 на лебедках 24 данной системы эквивалентна трем полным оборотам каната 4 на одной лебедке. Четыре лебедки 24, на которые намотан один и тот же канат, соединены, например, посредством зубчатых колес, с двигателем 28 (возможно посредством промежуточного редуктора), приведение в действие которого регулируется посредством интеллектуальной системы управления. Именно посредством данных лебедок 24 осуществляется приведение в движение кайтов 2. Альтернативное решение (не показанное в чертежах) состоит в использовании одного двигателя для каждой лебедки 24. Для упрощения, ниже в данном документе будет сделана ссылка на случай, в котором системы 22 для наматывания и разматывания канатов 4 снабжены одним двигателем 28 для всех четырех лебедок 24, на которые намотан один канат 4.
Трение между каждой лебедкой 24 и канатом 4 может быть увеличено посредством соответствующего профилирования поверхности лебедок 24, чтобы размещать канат 4 увеличивая поверхность контакта между канатом 4 и лебедкой 24.
Во всех случаях, концентрируя внимание на одном канате, можно устанавливать разную шероховатость поверхности четырех лебедок 24, чтобы постепенно увеличивать трение между канатом 4 и лебедкой 24, продвигаясь к системам 23 хранения.
В случае использования одного каната 4 в качестве соединительного элемента между модулем 5 ветровой системы 1 и кайтами 2, система 22 наматывания и разматывания канатов 4 содержит только четыре лебедки 24. Это уменьшает нагрузку системы 22 наматывания и разматывания канатов 4 и инерцию модуля 5 ветровой системы 1, при меньших затратах энергии при запуске системы.
Необходимо помнить, что необходимость разделения между системой 22 привода и системой 23 хранения для канатов 4 обусловлена большой длиной участков каната 4, соединенных с кайтами 2. Если бы была предусмотрена по существу одна лебедка для каждого каната 4 (таким образом функционирующая и как система привода и как система хранения), то канат 4 был бы полностью намотан вокруг барабана лебедки, образуя множество слоев и одновременно выдерживая большие нагрузки. Такая ситуация должна быть исключена, поскольку силы трения, которые возникают вследствие скольжения между разными витками каната 4, будут истирать канат 4 до такой степени, что это будет ухудшать его механические свойства.
В качестве альтернативы системам 22 для наматывания и разматывания канатов 4 с четырьмя лебедками, можно использовать, например, одну лебедку для каждого каната 4. В таком случае канат 4 наматывается вокруг такой лебедки посредством осуществления лишь ограниченного количества оборотов (которое приводит к образованию одного слоя витков), после чего он проходит к системе 23 хранения. Другая альтернатива состоит в использовании устройств с парой обращенных друг к другу направляющих, в пределах которых установлен канат 4.
Ветровая система 1 в соответствии с настоящим изобретением дополнительно содержит по меньшей мере одну систему 23 хранения канатов 4 (не показана).
Система 23 хранения канатов 4 представляет собой элементы модуля 5 ветровой системы 1, которые обеспечивают хранение канатов 4 кайтов 2.
Ветровая система 1 в соответствии с настоящим изобретением снабжена, например, системами 23 хранения канатов 4.
Таким образом, каждый модуль 5 ветровой системы 1 снабжен системой 23 хранения канатов 4, содержащей пару лебедок 25, вокруг которых намотана пара канатов 4 соответствующей цепочки 3 кайтов 2. Данные лебедки 25 соединены, посредством пары редукторов, с парой двигателей 29, приведение в действие которых регулируется посредством интеллектуальной системы управления. По аналогии с отмеченным выше, в случае использования одного каната 4 в качестве соединительного элемента между модулем 5 ветровой системы 1 и соответствующей цепочкой 3 кайтов 2, система 23 хранения канатов 4 содержит одну лебедку 25, соединенную, через редуктор, с одним двигателем 29. Это уменьшает нагрузку системы 23 хранения канатов 4 и инерцию модуля 5 ветровой системы 1, при меньших затратах энергии при запуске системы.
Системы 23 хранения также не участвуют в приведении в движение кайтов 2. Таким образом, натяжение канатов 4, намотанных вокруг лебедок 25 систем 23 хранения, значительно меньше чем натяжение, которое может быть определено в участках каната 4, намотанного на лебедках 24 систем 22 наматывания и разматывания. Следовательно, в тех случаях когда нагрузка канатов 4 больше, количество витков на лебедках 24 такое, что канаты 4 никогда не будут размещаться в два или более слоев. И наоборот, на лебедках 25 систем 23 хранения, канаты 4 намотаны в несколько слоев, а натяжение минимальное. Диаметр лебедок 25, входящих в состав систем 23 хранения, больше чем диаметр лебедок 24 систем 22 наматывания и разматывания, чтобы так или иначе минимизировать количество слоев намотки. Поэтому интеллектуальная система управления предназначена также для синхронизации вращения лебедок 24 и 25 системы 22 наматывания и разматывания канатов 4 и системы 23 хранения, вокруг которых наматывается один и тот же канат 4. Это принципиально для регулирования нагрузки на участок каната 4, заключенный между двумя системами 22 и 23, прежде всего во время этапов запуска и остановки ветровой системы 1.
Поскольку на лебедках 25 систем 23 хранения канатов 4 витки расположены в несколько слоев, рядом с каждой лебедкой 25 необходимо размещать приводной модуль 26, который вынуждает канат 4 правильно наматываться на лебедку 25 и предотвращает проскальзывание между канатом 4 и краями лебедки 25 и между самими витками. Приводные модули 26 канатов 4 представляют собой элементы модулей 5 ветровой системы 1, которые вынуждают канаты 4 правильно наматываться на лебедки 25 систем 23 хранения и которые предотвращают проскальзывание между канатами 4 и краями лебедок 25 и между самими канатами 4.
Ветровая система 1 в соответствии с настоящим изобретением снабжена, например, приводными модулями 26 канатов 4.
Таким образом, данные приводные модули 26 состоят из подвижного элемента 27, связанного с рельсом, расположенным параллельно оси вращения лебедки 25 соответствующей системы 23 хранения канатов 4. Подвижный элемент 27 выполнен с возможностью перемещения в двух направлениях, и на нем установлен шкив 34. В частности, такая тележка 27 перемещается при каждом шаге лебедки 25.
В приводных модулях 26 канатов 4, перемещение подвижного элемента 27 осуществляется посредством электродвигателя 30, регулирование работы которого осуществляется посредством интеллектуальной системы управления, которая приводит в движение кайты 2.
Каждый электродвигатель 30 предпочтительно представляет собой моментный электродвигатель, действующий в прямом приводе.
В ветровой системе 1 предусмотрен приводной модуль 26 канатов 4 для каждой лебедки 25 систем 23 хранения.
В качестве альтернативы использованию приводных модулей 26 канатов 4, можно, например, размещать каждую лебедку 25 систем 23 хранения канатов 4 на тележке, которая перемещается на направляющей, расположенной параллельно оси вращения соответствующей лебедки 25. Скольжение тележки осуществляется посредством электродвигателя, регулирование работы которого осуществляется посредством интеллектуальной системы управления. При применении данного решения, приводной модуль 26 каната 4 уже не требуется, поскольку перемещается сама лебедка 25, чтобы обеспечивать правильное наматывание каната 4.
Модули 5 ветровой системы 1 снабжены электродвигателями, которые также выполняют функцию генераторов, и генераторами 20 и/или 21, которые также выполняют функцию двигателей.
Электродвигатели представляют собой двигатели, посредством которых осуществляется активация лебедок 24 и 25 и приводных модулей 26 канатов 4.
В частности, для каждого каната 4 ветровая система 1 содержит три электродвигателя:
- двигатель 28, обеспечивающий вращение лебедок 24 системы 22 наматывания и разматывания каната 4;
- двигатель 29, обеспечивающий вращение лебедки 25 системы 23 хранения каната 4;
- двигатель 30, обеспечивающий перемещение подвижного элемента 27 приводного модуля 26 каната 4 (или тележки, на которой установлена лебедка 25 системы 23 хранения канатов 4).
Для перемещения концевой части 10 систем 8 восстановления, каждый модуль 5 ветровой системы 1 дополнительно содержит гидравлическую систему, которая приводит в движение гидроцилиндры 32, или линейные электромеханические модули.
Каждый из двигателей 28, 29 и 30 может быть соединен с соответствующей лебедкой 24 и 25 или приводным модулем 26 канатов 4 через редуктор, например, планетарного типа.
Поскольку данные двигатели 28 и 29 могут также выполнять функцию генераторов, можно вырабатывать электроэнергию посредством двигателей 28, соединенных с лебедками 24 системы 22 наматывания и разматывания канатов 4, посредством использования тяги, оказываемой кайтами 2 на лебедки 24. Управление электродвигателями осуществляется посредством интеллектуальной системы управления, и электродвигатели, соответствующие одному и тому же канату 4 кайтов 2, должны работать в синхронизме.
Для того чтобы вырабатывать электроэнергию посредством использования передвижения модулей 5 ветровой системы 1 посредством кайтов 2, существует множество решений, которые могут быть применены, которые зависят также от способа перемещения модулей 5 на рельсах 6.
Выработка электроэнергии может осуществляться посредством генераторов/двигателей 20, приводимых в действие непосредственно вращением колес 16, посредством которых модули 5 ветровой системы 1 перемещаются на классическом рельсе 6 (или приводимых в действие посредством вращения колес 16 тележек 11, используемых для преобразования энергии).
Как было отмечено выше, выработка электроэнергии может также осуществляться посредством генераторов 21, приводимых в действие посредством вращения зубчатых колес 18, которые катятся на по меньшей мере одной рейке 15, расположенной на классическом рельсе 6, на котором перемещаются модули 5 ветровой системы 1.
И наконец, выработка энергии может осуществляться посредством использования реверсивных магнитных линейных двигателей, так что они выполняют функцию генераторов.
В железнодорожном транспорте с магнитной левитацией, магнитное отталкивание и притяжение используются не только для поднятия в воздух поезда, но также как средство передвижения. В частности, для перемещения поезда и для его торможения, в транспорте на основе магнитной левитации используется синхронный линейный двигатель, который выполняет функцию электрического поворотного двигателя, в котором статор разомкнут и уложен вдоль рельса. Ротор и статор создают не крутящий момент, а силу прямолинейного движения. Такая сила создается посредством ряда магнитов или соленоидов, которые создают скользящее магнитное поле, которое взаимодействует с электромагнитами, размещенными на рельсе. Магнитное поле, происходящее от поезда, возбуждает в электромагнитах рельса электрический ток, который приводит в действие посредством отталкивания индуцирующего поля. При этом образуется сила, которая продвигает поезд в направлении, противоположном направлению скольжения магнитного поля.
Данный принцип может быть использован для магнитного преобразования в электроэнергию механической энергии, получающейся от эффекта буксирования, оказываемого кайтами 2 на модули 5 ветровой системы 1. В частности, модули 5 ветровой системы 1 могут быть снабжены постоянными магнитами (которые соответственно не нуждаются в питании), возможно при помощи соленоидов полупроводникового типа (которые требуют относительно мало энергии), и можно размещать на рельсе 6 металлические обмотки, которые выполняют функцию электромагнитов. Такие обмотки соответственно расположены так, что постоянные магниты, когда модули 5 перемещаются на рельсе 6, наводят токи в этих электромагнитах. Такие наведенные токи частично генерируют магнитное поле, которое противоположно индуцирующему полю, обеспечивающее левитацию модулей 5, и частично являются результатом преобразования механической энергии в электроэнергию. В частности, модульная структура из постоянных магнитов и соответствующей магнитной схемы, обращенной к рельсу 6 и к модулям 5, вызывает непрерывное изменение индуктивного потока во время относительного перемещения модулей 5 относительно рельса 6. Такие изменения потока в магнитных схемах, предпочтительно, связаны с обмотками для аккумулирования электроэнергии. Данные обмотки могут быть соединены с силовой электроникой, которая изменяет их поглощение контролируемым и быстрым способом. Таким образом, система превращается в привод, который способен вступать в дело посредством модулирования сил в динамике переходных процессов. Данная особенность позволяет реализовать виртуальный амортизатор, который способен поглощать возможные избытки энергии колебаний или вибраций подвижных элементов, снабженных постоянными магнитами, в направлении нормали к плоскости воздушного зазора.
Постоянные магниты, которыми снабжены модули 5, могут представлять собой, например, магниты типа неодим-железо-бор. Такие магниты представляют собой наилучшее средство для обеспечения достаточно широкого воздушного зазора и мощных магнитных потоков. Максимальная способность подвижных элементов, снабженных постоянными магнитами, зависит от обращенной поверхности и использует преимущество магнитного отталкивания, которое изменяется с квадратом расстояния.
Таким образом, использование магнитной левитации посредством постоянных магнитов позволяет объединять три функции в одной подсистеме: подвеску модулей 5 с низким трением (поэтому скольжение модулей 5 является очень эффективным и может осуществляться без изнашивания элементов), генерирование электроэнергии (которое осуществляется непосредственно в рельсе 6) и поглощение энергии возможных колебаний и вибраций подвижных элементов, снабженных постоянными магнитами, под тягой модулей 5 (и соответственно растянутой гибкой структуры 12).
Для того чтобы предотвратить риски вытягивания подвижных элементов, снабженных постоянными магнитами, данный тип опорного соединения имеет две степени свободы в виде шарового шарнира и оказывает давление в области центра масс подвижного элемента. Таким образом, передаются только напряжения вдоль направления скольжения, напряжения поперечные и напряжения плоские или нормальные к плоскости воздушного зазора.
Что касается преобразования энергии, предусмотрено четыре конфигурации, которые можно применять в ветровой системе 1 настоящего изобретения:
- модули 5 ветровой системы 1 перемещаются на классических основных рельсах 6 посредством колес 16 и 17, вращение которых непосредственно приводит в действие генераторы 20 для генерирования тока. Колеса 16, соединенные с генераторами 20, представляют собой колеса, на которые опирается вес модуля 5. Такая конфигурация может быть применена только в том случае, если трение качения таких колес 16 достаточно для приведения в действие генераторов 20;
- модули 5 ветровой системы 1 перемещаются на классических основных рельсах 6 посредством колес 16 и 17, но генерирование тока осуществляется преимущественно посредством приведения в действие генераторов 21, соединенных с зубчатыми колесами 18, катящимися на по меньшей мере одной рейке 15. Даже если в такой конфигурации гладкие колеса 16 выполняют главным образом опорную функцию, они в любом случае соединены с двигателями 11, которые, как описано ниже, приводятся в действие при запуске ветровой системы 1 для введения в действие модулей 5. Такие двигатели 5 могут быть использованы как генераторы, когда ветровая система 1 приводится в действие, используя трение качения между гладкими колесами 16 и классическим рельсом 6;
- модули 5 ветровой системы 1 перемещаются на рельсах 6, которые представляют собой сочетание классического рельса и магнитного рельса, посредством колес 16 и 17, которые выполняют исключительно опорную функцию. Генерирование тока осуществляется посредством использования реверсивных магнитных линейных двигателей так, что они работают как генераторы;
- модули 5 ветровой системы 1 перемещаются на рельсах 6, которые представляют собой сочетание классического рельса и магнитного рельса, посредством магнитной левитации. Модули 5 также снабжены колесами 16, которые обеспечивают поддержание воздушного зазора. Генерирование тока осуществляется посредством использования реверсивных магнитных линейных двигателей так, что они работают как генераторы.
Из четырех вышеописанных конфигураций, конфигурации, которые предусматривают использование реверсивных магнитных линейных двигателей, представляют собой конфигурации, которые обеспечивают выдачу электрической мощности более высокого порядка величины.
Устройства, которые участвуют в выработке электроэнергии, представляющие собой поворотные генераторы/двигатели 20 или реверсивные линейные двигатели, используются как двигатели при запуске ветровой системы 1, чтобы продвигать модули 5 и создавать слабый ветер на конце систем 8 восстановления, чтобы способствовать подъему кайтов 2. Если модули 5 ветровой системы 1 взаимно не соединены посредством растянутой гибкой структуры 12, то существует другой режим, в котором генераторы 20 используются в качестве двигателей, когда во время работы ветровой системы 1 эффект буксирования кайтов 2 отсутствует. В таком случае, модуль 5 ветровой системы 1 сначала продолжает двигаться по инерции. Если интеллектуальная система управления не сумеет быстро восстановить эффект буксирования, то приводятся в действие генераторы 20, чтобы функционировать как двигатели, и модуль 5 продолжает двигаться, не вынуждая следующий модуль 5 замедлять свое собственное перемещение.
Интеллектуальная система управления представляет собой систему, посредством которой кайты 2 автоматически приводятся в движение. Основная задача данного элемента состоит в приведении в действие двигателей 28 и 29, соединенных с лебедками 24 и 25 систем 22 наматывания и разматывания и систем 23 хранения канатов 4, и в управлении системой, приспособленной для приведения в движение концевой части 10, приспособленной для ориентирования, систем 8 восстановления кайтов 2. Очевидно, что каждая цепочка 3 кайтов 2 приводится в движение независимо от других цепочек, исключая возможность столкновений в полете.
Таким образом, интеллектуальная система управления выполняет следующие основные функции:
- автоматическое управление полетом кайтов 2;
- самокалибровка датчиков в качестве оборудования кайтов 2;
- предотвращение столкновений между кайтами 2 и другими летающими объектами;
- активация приводных модулей 26 канатов 4 или двигателей для перемещения лебедок 25 системы 23 хранения;
- активация двигателей;
- компенсация изменений нагрузки канатов 4.
Система электроснабжения содержит все необходимые элементы для аккумулирования и выдачи электроэнергии. В частности, ветровая система 1 содержит источники электроснабжения, трансформаторы и аккумуляторы, посредством которых осуществляется хранение вырабатываемой электроэнергии, выдача тока в двигатели во время этапа запуска модулей 5 ветровой системы 1 и для восстановления кайтов 2, снабжение всех электронных элементов и выдача электроэнергии внешним пользователям. Если даже управление работой всех электронных элементов ветровой системы 1 осуществляется посредством интеллектуальной системы управления.
Вообще, процесс, осуществляемый ветровой системой 1 настоящего изобретения, который объединяет процесс преобразования энергии из энергии ветра с электроэнергией, проводимой через ветровую систему 1 настоящего изобретения, включает четыре этапа, которые циклически повторяются, когда ветровая система приводится в действие.
Со ссылкой на один модуль 5 ветровой системы 1 и гипотетически предполагая, что направление, в котором дует ветер W, является постоянным и что рельсы 6 и 7 описывают круговую траекторию, во время первых трех этапов процесса в соответствии с настоящим изобретением, перемещение модуля 5 вызывается энергией ветра, извлекаемой из ветра W посредством цепочки 3 кайтов 2, соединенных с таким модулем 5. Интеллектуальная система управления соответственно приводит в движение цепочку 3 кайтов 2 так, что энергия ветра, которую можно извлекать из ветра, является максимальной, совместно с необходимостью удерживания кайтов 4 по мере возможности тангенциальными относительно рельса 6 на протяжении всего этапа. Фактически чем более тангенциальными являются канаты 4 относительно рельса 6, тем больше полезная составляющая силы тяги с точки зрения перемещения модуля 5. Тот факт, что канаты 4 удерживаются тангенциальными относительно рельса 6, предполагает, что система управления приводит в движение цепочку 3 кайтов 2 так, чтобы преимущественно использовать подъемную силу, то есть составляющую силы, перпендикулярную скорости ветра. Таким образом, кайты 2 двигаются, продолжая разворачиваться относительно поверхности фронта ветра. При этом ветер перемещает кайты 2, натягивая канаты 4, соединенные с модулями 5 ветровой системы 1: данный эффект буксирования обусловливает перемещение модулей 5 и выработку электроэнергии посредством генераторов 20 и/или 21 или реверсивных магнитных линейных двигателей.
Четвертый и последний этап процесса, осуществляемого ветровой системой в соответствии с настоящим изобретением, осуществляется в подветренной области. Интеллектуальная система управления приводит в движение цепочку 3 кайтов 2, чтобы быстро пересекать такую область, не оказывая тормозящего эффекта на модули 5 ветровой системы 1. В частности, не только интеллектуальная система управления приводит в движение цепочку 3 кайтов 2, чтобы отслеживать перемещение модуля 5, но и имеет место эффект буксирования от кайтов 2 (хотя и недостаточно эффективный). Если модули 5 ветровой системы 1 взаимно соединены посредством системы соединительных тяг 14, то модули 5, для которых эффект буксирования еще имеет место, принимают участие в продвижении модуля 5, который находится на данном этапе рабочего цикла. Если же модули 5 не взаимосвязаны посредством системы соединительных тяг 14, то во время такого этапа продвижение рассматриваемого модуля 5 осуществляется в основном посредством инерции.
С конкретной ссылкой на фиг. 21, который показывает потенциальную траекторию, описываемую кайтом 2 во время цикла процесса, осуществляемого ветровой системой 1 в соответствии с настоящим изобретением, и предполагая, что направление W скорости ветра и направление перемещения, указанное стрелкой R, модулей 5 сохраняются неизменными, концентрируя внимание на одном модуле 5 ветровой системы 1, четыре этапа, составляющие процесс, осуществляемый ветровой системой в соответствии с настоящим изобретением, обозначенные соответственно заштрихованными прямоугольниками а, b, c и d, ограничивающими различные области пространства, в которых находится кайт 2, в зависимости от направления W ветрового течения, в которое он погружен, выглядят следующим образом:
а) во время данного этапа кайт 2 продолжается поперечно относительно направления W ветра (прямоугольник а на фиг. 21). При этом ветер дует поперек относительно направления продвижения кайта 1. Длина размотанных участков каната 4 увеличивается, поскольку кайты 2 удаляются от модуля 5 ветровой системы 1.
b) во время данного этапа кайт 2 продолжается вдоль упомянутого направления W ветра, в котором дует ветер (прямоугольник b на фиг. 21). На данном этапе использование подъемной силы кайта 1 суммируется с силой сопротивления. Это делает скорость кайта 2 больше чем скорость W ветра, и для того чтобы использовать эффект буксирования, необходимо частично сматывать канаты 4. Несмотря на такое извлечение, даже во время данного этапа, баланс энергии положительный;
с) по аналогии с тем, что осуществляется во время вышеупомянутого первого этапа а) поперечного ветра, на данном этапе кайт 2 получается поперечно продолжающимся относительно направления W ветра (прямоугольник с на фиг. 21), и длина размотанных участков каната 4 увеличивается, поскольку кайты 2 удаляются от модуля 5 ветровой системы 1.
d) во время данного этапа кайт 1 продолжается вдоль противоположного направления относительно направления ветра (прямоугольник d на фиг. 21). Интеллектуальная система управления приводит в движение кайт 2, чтобы не создавать никакого тормозящего эффекта, поскольку он осуществляет резкий маневр, определяемый как «азимутальный попорот», который состоит в быстром переходе между двумя поперечными секущими, во время которого кайт 2 перемещается в воздухе на расстояние, равное по меньшей мере утроенной задетой дуге окружности за время, в течение которого модуль 5 ветровой системы 1 перемещается вдоль такой дуги. Кайт 2 теряет высоту, никак не препятствуя перемещению модуля 5. Во время данного этапа необходимо востановить, в течение относительно короткого времени, длинный участок размотанного каната 4. В конце упомянутого азимутального поворота, кайт 2 расположен так, чтобы захватываться ветром W, и продолжается поперечно относительно данного последнего; и
е) циклически повторять предыдущие этапы для каждого полного оборота модуля 5 вдоль рельса 6.
Однако, как можно отметить, в отличие от решения, раскрытого в предшествующем уровне техники, связанного с ветровой системой с консолями и вращающимся валом, в которой предусмотрены системы для аккумулирования энергии, при которых длина размотанных участков каната 4 увеличивается или уменьшается без вращения лебедок 24 и 25 системы 22 наматывания и разматывания и систем 23 хранения канатов 4, в ветровой системе 1 в соответствии с настоящим изобретением регулирование размотанных участков каната 4 осуществляется посредством упомянутых лебедок 24 и 25. На протяжении всего рабочего цикла, кайты 2 приводятся в движение так, чтобы попеременно набирать и терять высоту. Данный выбор продиктован, во-первых, технической необходимостью, поскольку модули 5 ветровой системы 1 перемещаются медленнее, чем кайты 2. Во-вторых, непрерывное чередование набора и потери высоты также очень выгодно с точки зрения оптимизации энергии, которая может быть извлечена из ветра. Фактически, за счет разворачивания относительно поверхности фронта ветра, мощность, которую способны развивать кайты 2, увеличивается.
Кроме того, относительно ветровой системы с консолями и вращающимся валом известного уровня техники, ветровая система 1 в соответствии с настоящим изобретением усовершенствована в следующих аспектах:
- тогда как ветровая система с консолями и вращающимся валом отличается центральной направляющей, и выработка электроэнергии осуществляется посредством использования крутящего момента, создаваемого на лопастях турбины, посредством кайтов, ветровая система настоящего изобретения отличается кольцевой направляющей, с по меньшей мере одним модулем, который перемещается на по меньшей мере одном рельсе, и преобразование энергии осуществляется посредством использования буксировки модулей посредством кайтов;
- тогда как в ветровой системе с консолями и вращающимся валом приведение в движение кайтов осуществляется исключительно посредством канатов, в ветровой системе настоящего изобретения приведение в движение кайтов может осуществляться также посредством спойлеров, расположенных на борту упомянутых кайтов. В частности, приведение в движение осуществляется посредством образования, посредством спойлеров, турбулентностей, которые вызывают градиенты давления. Такой способ приведения в движение совмещается или заменяет способ, предусмотренный в ветровой системе с консолями и вращающимся валом;
- тогда как в ветровой системе с консолями и вращающимся валом элементы, приспособленные для хранения канатов и приведения в движение кайтов, расположены в центре турбины (и соответственно далеко от точки, в которой канаты удаляются от земли по направлению кайтам), в ветровой системе настоящего изобретения системы хранения для канатов расположены на борту каждого модуля, рядом с системами восстановления кайтов. Отсутствие консолей придает ветровой системе настоящего изобретения структуру, благодаря которой можно генерировать мощности со значительно более высокими порядками величины (например, 1 ГВт) относительно мощности, которая может быть получена посредством ветровой системы с консолями и вращающимся валом. Фактически удаление консолей уменьшает инерцию ветровой системы и позволяет увеличить длину траектории, описываемой модулями, и, следовательно, при неизменном расстоянии между модулями, количество модулей, которое содержит ветровая система;
- тогда как в ветровой системе с консолями и вращающимся валом трубы для восстановления кайтов неподвижны, в ветровой системе настоящего изобретения системы восстановления кайтов содержат концевую часть, приспособленную для ориентирования, с возможностью вращения как в горизонтальной плоскости, так и в вертикальной плоскости. Это облегчает операции восстановления и запуска кайтов.
В качестве дополнительного доказательства высокой эффективности, демонстрируемой ветровой системой и процессом в соответствии с настоящим изобретением, можно привести некоторые соображения относительно энергии, которую способен извлекать из ветра один кайт 1.
С этой целью, с конкретной ссылкой на фиг. 22, целесообразно прежде всего обратить особое внимание на аэродинамику системы. Известно, что когда ветровое течение встречается с неподвижной аэродинамической поверхностью AS (в английском варианте «airfoil»), такое течение создает две силы: силу D лобового сопротивления, параллельную направлению W ветра, в котором дует ветер, и подъемную силу L, перпендикулярную данному направлению W. В случае ламинарного потока ветра, ветровые течения AF1, проходящие над аэродинамической поверхностью AS, быстрее чем течения AF2, проходящие под ней, поскольку они должны перемещаться на большее расстояние. Это создает падение давления в верхней части кайта и соответственно градиент давления, который вызывает подъемную силу L.
И наоборот, со ссылкой на фиг. 23, предположим, что кайт АМ способен перемещаться вдоль направления DT подъемной силы. Вследствие эффекта такого перемещения, нижняя поверхность аэродинамического профиля АМ наклоняется относительно скорости ветра. В таком случае, подъемная сила и сила лобового сопротивления соответственно перпендикулярна и параллельна соответствующей скорости ветра относительно кайта.
Если обозначить S1 силу, параллельную направлению перемещения, а S2 силу, перпендикулярную данному направлению, то составляющая подъемной силы L, параллельная направлению перемещения, имеет упомянутое направление перемещения аэродинамического профиля АМ, а параллельная составляющая силы D лобового сопротивления имеет противоположное направление.
Поэтому с точки зрения обеспечения перемещения в перпендикулярном направлении к ветровым течениям, целесообразно наклонять кайт АМ, чтобы получить высокое отношение между составляющей L подъемной силы вдоль направления DT перемещения кайта АМ и составляющей D силы лобового сопротивления.
Эти соображения также справедливы для каждого отдельного кайта 2 ветровой системы 1.
Интеллектуальная система управления фактически приводит в движение каждый кайт 2, чтобы поддерживать отношение между подъемной силой и силой лобового сопротивления во время этапов, отличающихся высоким эффектом буксирования посредством крылоподобных кайтов 2. Таким образом, кайты 2 колеблются, разворачиваясь относительно фронта ветра и генерируя мощность, обусловленную натяжением канатов 4.
Мощность, генерируемая посредством одного кайта 2, вычисляется посредством умножения удельной мощности ветра (Specific Wind Power) на площадь встречного ветра, перехватываемого кайтом (то есть площадь кайта) А и на коэффициент мощности кайта (Kite Power Factor-KPF), коэффициент полезного действия которого зависит от соотношения Vk/Vw между скоростью Vk кайта и скоростью Vw ветра и от двух коэффициентов Kd и Kl.
Коэффициент Kd относится к лобовому сопротивлению, то есть когда кайт тянет элемент связи с землей с силами и скоростями вдоль ветра, а коэффициент Kl относится к подъемной силе, то есть когда кайт тянет элемент связи с землей посредством колебания, чтобы разворачиваться относительно поверхности фронта ветра. Благодаря подъемной силе скорость кайта значительно больше скорости ветра. Чем больше подъемная сила относительно лобового сопротивления, тем больше мощность кайта.
В качестве примера, предположим, что Vk/Vw=10, Kl=1,2 и Kd=0,1. В таком случае KPF=20.
Если предположить, что плотность ρ воздуха постоянна и равна 1,225 кг/м3, то удельная мощность, создаваемая ветром (Specific Wind Power) равна:
SpecificWindPower = 1/2⋅ρVw3=0,5⋅1,225⋅63=132,3 Вт/м2
Мощность, которая может быть создана посредством одного кайта (Kite Power) выражается следующей формулой:
KitePower = KPF ⋅ SpecificWindPower ⋅ A
Если, например, использовать кайт с поверхностью 18 м2, перемещаемый со скоростью 60 м/с посредством ветра, дующего со скоростью 6 м/с, то мощность, которую можно генерировать на уровне каната, равна 47628 Вт. Такая мощность будет соответствовать максимальной мощности, которую способен генерировать кайт 2.
Величина, принимаемая KPF, в любом случае зависит от эффективности кайта 2. Можно добиться того, что величина KPF будет больше 20. Если, например, KPF принимает величину, равную 40, то максимальная мощность, которая может быть получена от кайта 2 с площадью 18 м2, будет равна 95256 Вт.
Фиг. 24 и 25 показывают увеличенные общие виды ветровой системы, показанной на фиг. 1.
Каждый из модулей 11 содержит, например, одну консоль 8, через которую проходят канаты 4.
Ветровая система 1, в случае морских применений, расположена на основаниях 41, которые плавают в море 40. Для поддерживания рельсов и тележек 11 могут быть использованы опоры 43.
Скользящие тележки 11 соединены друг с другом посредством монолитного ротора 42 с малой гибкостью, предпочтительно заполненного бетонной массой, чтобы увеличить инерцию ротора 42. В таком случае ротор 42 превращается в большое маховое колесо с большим количеством кинетической энергии.
Со ссылкой на фиг. 26 и 27, можно отметить, что магнитный скользящий элемент 46 соединен с другими элементами модуля 5 посредством соединителя 49 и адаптивных подвесок 47.
В случае использования монолитного ротора 42 с малой гибкостью, такой ротор 42 соединен с адаптивной подвеской 47 посредством по меньшей мере одного шарнира. Динамическая подвеска соединена с магнитным скользящим элементом 46 посредством по меньшей мере одного соединителя 49. Ротор 42, адаптивная подвеска 47 и магнитный скользящий элемент 46 перемещаются на магнитном рельсе 54. Для передачи и приема энергии к и от ротора 42 может быть использован намотанный линейный статор 45.
Со ссылкой на фиг. 27, магнитный рельс 54 выполняет функцию обеспечения возможности поступательного перемещения магнитного скользящего элемента 46 без непосредственного контакта между магнитным рельсом 54 и магнитным скользящим элементом 46.
На фиг. 27 магнитный рельс расположен под наклоном.
Воздушный зазор 33 поддерживается посредством магнитов 51 на скользящем элементе 46 и магнитов 52 на рельсе 6. Такие магниты 51, 52 могут представлять собой постоянные магниты или электромагниты.
Фиг. 28 показывает общий вид предпочтительного варианта осуществления ветровой системы в соответствии с настоящим изобретением.
Со ссылкой на фиг. 1 и 28, можно определить мультикарусельную конструкцию 48, в которой по меньшей мере две ветровые системы 1 взаимодействуют так, чтобы извлекать энергию из ветра. Такая мультикарусельная конструкция 48 имеет преимущество извлечения большего количества мощности по сравнению с одной ветровой системой 1, и в то же время соблюдая ограничение минимального расстояния между кайтами 2 или цепочками 3 кайтов 2. Это также обеспечивает более высокую плотность мощности относительно площади занимаемой земли.
Таким образом, ветровая система 1 настоящего изобретения содержит тележки 11, которые приспособлены для перемещения на рельсах 6, 7 посредством монолитного ротора 42, с которым соединены тележки 11; такой монолитный ротор 42 функционально соединен с множеством магнитных скользящих элементов 46, выполненных с возможностью скольжения вдоль магнитного рельса 54 без непосредственного контакта с ним.
Каждый магнитный скользящий элемент 46 соединен с монолитным ротором 42 посредством соединителя 49 и адаптивных подвесок 47; этот ротор 42, эти адаптивные подвески 47 и эти магнитные скользящие элементы 46 приспособлены для перемещения на магнитном рельсе 54, при этом для передачи и приема энергии к и от ротора 42 используется намотанный линейный статор.
Кроме того, магнитные скользящие элементы 46 удерживаются отдельными от и без непосредственного контакта с магнитным рельсом 54 посредством воздушного зазора 44, поддерживаемого посредством магнитов 51, размещенных на магнитных скользящих элементах 46, и магнитов 52, соответственно размещенных на магнитном рельсе 54; эти магниты 51, 52 представляют собой электромагниты, причем такие электромагниты снабжаются электроэнергией, поступающей от кайтов 2.
В качестве альтернативы, данные магниты 51, 52 могут представлять собой постоянные магниты.
Чтобы обеспечить более равномерное поступательное перемещение самого ротора 42, монолитный ротор 42 предпочтительно заполнен бетоном, придающим ему малую гибкость и увеличивающим инерцию ротора 42.
Ветровая система 1 настоящего изобретения, как правило, содержит по меньшей мере одну магнитную полосу, используемую как для пассивной магнитной левитации, так и для генерирования энергии, направленную вдоль направления перемещения тележек 11.
В качестве альтернативы, такая магнитная полоса для пассивной магнитной левитации и генерирования энергии может быть направлена перпендикулярно направлению перемещения тележек 11.
Ветровая система 1 настоящего изобретения может дополнительно содержать, для каждого из модулей 5, систему (не показанную) для демпфирования скачков силы канатов 4, причем упомянутая система для демпфирования скачков силы состоит из по меньшей мере одного привода для генерирования по меньшей мере одной силы на канатах 4.
Кроме того, мощность, вырабатываемая каждым из модулей 5, может подвергаться непрерывным изменениям, чтобы демпфировать инерционные колебания ветровой системы 1 или чтобы обеспечивать воздушный зазор 44 между такими модулями 5 и рельсами 6.
Чтобы использоваться с данной новой конструкцией, колеса модулей 5 выполнены в виде двух обращенных друг к другу С-образных элементов, охватывающих рельсы 6.
Аналогично, при наличии магнитов 51, 52, магниты 51, 52 модуля 5 расположены в виде двух обращенных друг к другу С-образных элементов, охватывающих рельсы 6.
Рельсы 6, предпочтительно, горизонтальные, параллельные или концентрические, или имеют любую пригодную форму и расположение в соответствии с их применением; кроме того, рельсы 6 предпочтительно расположены под наклоном так, чтобы противодействовать радиальной центробежной силе, обусловленной перемещением модуля 5 и силой тяги кайта 2, причем рельсы 6 предпочтительно приподняты от земли посредством опор 43.
Кабели 4, которые продолжаются от модулей 5 до кайтов 2, проходят через по меньшей мере один шкив (не показанный), чтобы уменьшать усталостное напряжение таких кабелей 4.
Кабели 4, которые продолжаются от модулей 5 до кайтов 2, могут содержать предохранительное устройство (не показанное), чтобы разрывать такие кабели 4, причем данное предохранительное устройство предпочтительно приводится в действие беспроводным способом.
При упомянутой конструкции, ветровая система 1 настоящего изобретения находит одно из своих самых эффективных применений, будучи построенной на плавающем рельсе 42, для глубоких морских применений; в этом случае плавающий рельс 42 имеет форму, которая предпочтительно либо круглая, эллиптическая или прямолинейная, либо любая другая пригодная форма для такой цели.
Изобретение, которое показано на фиг. 28, относится также к комплексной ветровой системе, состоящей из множества ветровых систем 1, которые описаны выше, причем каждая из таких ветровых систем 1 расположена так, чтобы минимизировать общую площадь занимаемой земли или максимизировать плотность мощности; при этом наилучшая конструкция, которая может быть придумана для такой цели, как показано, представляет собой конструкцию, в которой множество ветровых систем 1 (в данном случае три) расположены концентрически одна с другой.
Реферат
Изобретение относится к ветровой системе для преобразования энергии посредством перемещения на рельсе модулей, буксируемых кайтами. Ветровая система (1) для преобразования энергии, содержит по меньшей мере один кайт (2); по меньшей мере один модуль (5), перемещающийся на по меньшей мере одном рельсе (6; 7), расположенном рядом с землей. Модуль (5) соединен посредством по меньшей мере одного каната (4) с кайтом (2), причем кайт (2) приводится в действие посредством модуля (5) так, чтобы буксировать модуль (5) на рельсе (6; 7) и осуществлять преобразование энергии ветра в электроэнергию посредством по меньшей мере одной генерирующей системы, взаимодействующей с модулем (5) и рельсом (6; 7). Канат (4) выполнен с возможностью передачи механической энергии от и к кайту (2) и управления траекторией полета кайта (2). Генерирующая система содержит по меньшей мере один генератор (20), который преобразует энергию ветра в электроэнергию посредством перемещения модуля (5) относительно рельса (6; 7). Модуль (5) снабжен по меньшей мере одной тележкой (11) для перемещения вдоль рельса (6; 7). Тележки (11) перемещаются на рельсах (6; 7) посредством вставки монолитного ротора (42), с которым соединены тележки (11). Монолитный ротор (42) функционально соединен с множеством магнитных скользящих элементов (46), выполненных с возможностью скольжения вдоль магнитного рельса (54) без прямого контакта с ним. Каждый магнитный скользящий элемент (46) соединен с монолитным ротором (42) посредством соединителя (49) и адаптивных подвесок (47). Ротор (42), адаптивные подвески (47) и магнитные скользящие элементы (46)перемещаются на магнитном рельсе (54), при этом для передачи и приема энергии к и от упомянутого ротора (42) используется линейный статор (45). Система содержит по меньшей мере одну магнитную полосу для пассивной магнитной левитации и генерирования энергии, направленную либо вдоль направления перемещения тележек (11), либо перпендикулярно направлению перемещения тележек (11). Изобретение направлено на максимальное использование энергии ветра для выработки электроэнергии. 2 н. и 10 з.п. ф-лы, 28 ил.
Комментарии