Способ и устройство для управления роботами для уборки пола - RU2684569C1
Код документа: RU2684569C1
Чертежи









Описание
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] По данной заявке испрашивается приоритет китайской заявки 201611109688.2, поданной 2 декабря 2016 г., содержание которой в полном объеме включено в данное описание в порядке ссылки.
ОБЛАСТВ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0002] Настоящее изобретение относится к области технологии изготовления бытовых электроприборов и, в частности, к способу и устройству для управления роботами для уборки пола.
УРОВЕНВ ТЕХНИКИ
[0003] В последние годы, с непрерывным развитием науки и технологии, растет потребность в высокотехнологичых продуктах, например, стиральных машинах, холодильниках, роботах бытового обслуживания и т.д. Наибольшую популярность среди роботов бытового обслуживания постепенно завоевывают интеллектуальные роботы для уборки пола, поскольку они могут автоматически производить уборку пола в доме без необходимости ручного участия. В ходе эксплуатации, интеллектуальные роботы для уборки пола будут производить уборку согласно вручную установленным рабочим режимам.
СУЩНОСТВ ИЗОБРЕТЕНИЯ
[0004] Для решения проблем, присущих уровню техники, варианты осуществления настоящего изобретения предусматривают способ и устройство для управления роботами для уборки пола. Техническое решение обеспечивается следующим образом:
[0005] Согласно первому аспекту настоящего изобретения, предусмотрен способ управления роботами для уборки пола, причем способ включает в себя:
[0006] получение информации задания на уборку, причем информация задания на уборку включает в себя общее задание на уборку;
[0007] определение информации управления уборкой для, по меньшей мере, двух роботов для уборки пола согласно информации задания на уборку, причем информация управления уборкой включает в себя информацию управления для каждого из роботов для уборки пола;
[0008] передачу каждой из упомянутой информации управления уборкой на соответствующий робот для уборки пола, благодаря чему, каждый из упомянутых роботов для уборки пола осуществляет задание на уборку согласно соответствующей информации управления уборкой.
[0009] Техническое решение, обеспеченное вариантами осуществления настоящего изобретения, может иметь следующие преимущества: благодаря получению информации задания на уборку, которая включает в себя общее задание на уборку, определение информации управления уборкой (информация управления уборкой включает в себя информацию управления для каждого из роботов для уборки пола), по меньшей мере, двух роботов для уборки пола согласно информации задания на уборку, с последующей передачей каждой из информации управления уборкой на соответствующий робот для уборки пола, каждый из роботов для уборки пола осуществляет задание на уборку согласно соответствующей информации управления уборкой, и эффективность уборки эффективно повышается.
[0010] Согласно варианту осуществления, информация задания на уборку включает в себя путь уборки, и информация управления уборкой включает в себя подпути уборки.
[0011] Определение информации управления уборкой для, по меньшей мере, двух роботов для уборки пола на основании информации задания на уборку включает в себя:
[0012] деление пути уборки в информации задания на уборку на, по меньшей мере, два подпути уборки;
[0013] назначение каждого из упомянутых подпутей уборки, по меньшей мере, одному роботу для уборки пола в качестве информации управления уборкой для робота для уборки пола, благодаря чему, каждый из упомянутых роботов для уборки пола осуществляет задание на уборку согласно соответствующему подпути уборки.
[0014] Техническое решение, обеспеченное вариантами осуществления настоящего изобретения, может иметь следующие преимущества: благодаря делению пути уборки в информации задания на уборку на, по меньшей мере, два подпути уборки и назначению каждого из упомянутых подпутей уборки, по меньшей мере, одному роботу для уборки пола в качестве информации управления уборкой для робота для уборки пола, благодаря чему, каждый из упомянутых роботов для уборки пола осуществляет задание на уборку согласно соответствующему назначенному подпути уборки, вследствие использования, по меньшей мере, двух роботов для уборки пола для совместной уборки пути, эффективно экономится время уборки и повышается эффективность уборки.
[0015] Упомянутое деление пути уборки в информации задания на уборку на, по меньшей мере, два подпути уборки включает в себя:
[0016] деление поровну пути уборки в информации задания на уборку на, по меньшей мере, два из подпутей уборки;
[0017] или, альтернативно, прием от пользователя пути уборки в информации задания на уборку, который делится на, по меньшей мере, два подпути уборки.
[0018] Согласно варианту осуществления, информация задания на уборку включает в себя область уборки, и информация управления уборкой включает в себя подобласти уборки.
[0019] Упомянутое определение информации управления уборкой для, по меньшей мере, двух роботов для уборки пола на основании информации задания на уборку включает в себя:
[0020] деление области уборки в информации задания на уборку на, по меньшей мере, две подобласти уборки;
[0021] назначение каждой из упомянутых подобластей уборки, по меньшей мере, одному роботу для уборки пола в качестве информации управления уборкой для упомянутого робота для уборки пола, благодаря чему, каждый из упомянутых роботов для уборки пола осуществляет задание на уборку согласно соответствующей подобласти уборки.
[0022] Техническое решение, обеспеченное вариантами осуществления настоящего изобретения, может иметь следующие преимущества: благодаря делению области уборки в информации задания на уборку на, по меньшей мере, две подобласти уборки и назначению каждой из упомянутых подобластей уборки, по меньшей мере, одному роботу для уборки пола в качестве информации управления уборкой для упомянутого робота для уборки пола, благодаря чему, каждый из упомянутых роботов для уборки пола осуществляет задание на уборку согласно соответствующей подобласти уборки; вследствие использования, по меньшей мере, двух роботов для уборки пола для совместной уборки пути, эффективно экономится время уборки и повышается эффективность уборки.
[0023] Упомянутое деление области уборки в информации задания на уборку на, по меньшей мере, две подобласти уборки включает в себя:
[0024] деление поровну области уборки в информации задания на уборку на, по меньшей мере, две из подобластей уборки;
[0025] или, альтернативно, прием от пользователя области уборки в информации задания на уборку, которая делится на, по меньшей мере, две подобласти уборки.
[0026] Согласно варианту осуществления, информация задания на уборку включает в себя уровень чистоты после уборки, и информация управления уборкой включает в себя режим уборки и время начала уборки.
[0027] Упомянутое определение информации управления уборкой для, по меньшей мере, двух роботов для уборки пола на основании информации задания на уборку включает в себя:
[0028] определение режима уборки для каждого робота для уборки пола, который осуществляет задание на уборку в области уборки, согласно уровню чистоты после уборки в информации задания на уборку и времени начала уборки в информации задания на уборку, в качестве информации управления уборкой для робота для уборки пола, благодаря чему, каждый из упомянутых роботов для уборки пола осуществляет задание на уборку в соответствующее время начала уборки согласно соответствующему режиму уборки.
[0029] Техническое решение, обеспеченное вариантами осуществления настоящего изобретения, может иметь следующие преимущества: благодаря определению режима уборки для каждого робота для уборки пола, который осуществляет задание на уборку в области уборки, согласно уровню чистоты после уборки в информации задания на уборку, каждый из упомянутых роботов для уборки пола осуществляет задание на уборку согласно соответствующему режиму уборки; вследствие использования, по меньшей мере, двух роботов для уборки пола для совместной уборки пути для достижения уровня чистоты, нужного пользователю, эффективно экономится время уборки и повышается эффективность уборки.
[0030] Согласно варианту осуществления, упомянутая информация задания на уборку включает в себя продолжительность времени уборки. И упомянутое определение информации управления уборкой для, по меньшей мере, двух роботов для уборки пола на основании информации задания на уборку включает в себя:
[0031] определение продолжительности времени уборки для, по меньшей мере, двух роботов для уборки пола согласно продолжительности времени уборки в информации задания на уборку, причем продолжительность времени уборки каждого из роботов для уборки пола равна продолжительности времени уборки в информации задания на уборку, благодаря чему, задание на уборку каждого из упомянутых роботов для уборки пола осуществляется в течение продолжительности времени уборки робота для уборки пола.
[0032] Техническое решение, обеспеченное вариантами осуществления настоящего изобретения, имеет преимущество в том, что: благодаря заданию продолжительности времени уборки для каждого из, по меньшей мере, двух роботов для уборки пола, задание на уборку каждого из роботов для уборки пола осуществляется в течение соответствующей продолжительности времени уборки, и уборка будет заканчиваться по истечении продолжительности времени уборки, что позволяет эффективно экономить энергию роботов для уборки пола.
[0033] Согласно варианту осуществления, упомянутое определение информации управления уборкой для, по меньшей мере, двух роботов для уборки пола на основании информации задания на уборку включает в себя:
[0034] передачу информации задания на уборку на главный робот для уборки пола из, по меньшей мере, двух роботов для уборки пола, благодаря чему, главный робот для уборки пола определяет информацию управления уборкой для, по меньшей мере, двух роботов для уборки пола на основании информации задания на уборку.
[0035] Согласно варианту осуществления, упомянутое получение информации задания на уборку включает в себя:
[0036] получение информации задания на уборку при вводе.
[0037] Согласно варианту осуществления, упомянутая передача каждой из упомянутой информации управления уборкой на соответствующий робот для уборки пола включает в себя:
[0038] передача каждой из упомянутой информации управления уборкой на главный робот для уборки пола из, по меньшей мере, двух роботов для уборки пола, благодаря чему, главный робот для уборки пола осуществляет задание на уборку согласно одному фрагменту информации управления уборкой и передачи других фрагментов информации управления уборкой на, по меньшей мере, один вспомогательный робот для уборки пола из, по меньшей мере, двух роботов для уборки пола.
[0039] Техническое решение, обеспеченное вариантами осуществления настоящего изобретения, может иметь следующие преимущества: благодаря передаче каждой из упомянутой информации управления уборкой на главный робот для уборки пола из, по меньшей мере, двух роботов для уборки пола, главный робот для уборки пола осуществляет задание на уборку согласно одному фрагменту информации управления уборкой и передачи других фрагментов информации управления уборкой на, по меньшей мере, один вспомогательный робот для уборки пола из, по меньшей мере, двух роботов для уборки пола; ввиду того, что терминалу нужно только соединяться с главным роботом для уборки пола, надежность передачи информации повышается.
[0040] Согласно варианту осуществления, способ дополнительно включает в себя:
[0041] определение главного робота для уборки пола и, по меньшей мере, одного вспомогательного робота для уборки пола из упомянутых, по меньшей мере, двух роботов для уборки пола.
[0042] Согласно второму аспекту настоящего изобретения, предусмотрено устройство для управления роботами для уборки пола. Устройство включает в себя:
[0043] модуль получения, выполненный с возможностью получения информации задания на уборку, причем информация задания на уборку включает в себя общее задание на уборку;
[0044] первый модуль определения, выполненный с возможностью определения информации управления уборкой для, по меньшей мере, двух роботов для уборки пола на основании информации задания на уборку, причем информация управления уборкой включает в себя информацию управления для каждого из роботов для уборки пола;
[0045] первый модуль передачи, выполненный с возможностью передачи каждой из упомянутой информации управления уборкой на соответствующий робот для уборки пола, благодаря чему, каждый из упомянутых роботов для уборки пола осуществляет задание на уборку согласно соответствующей информации управления уборкой.
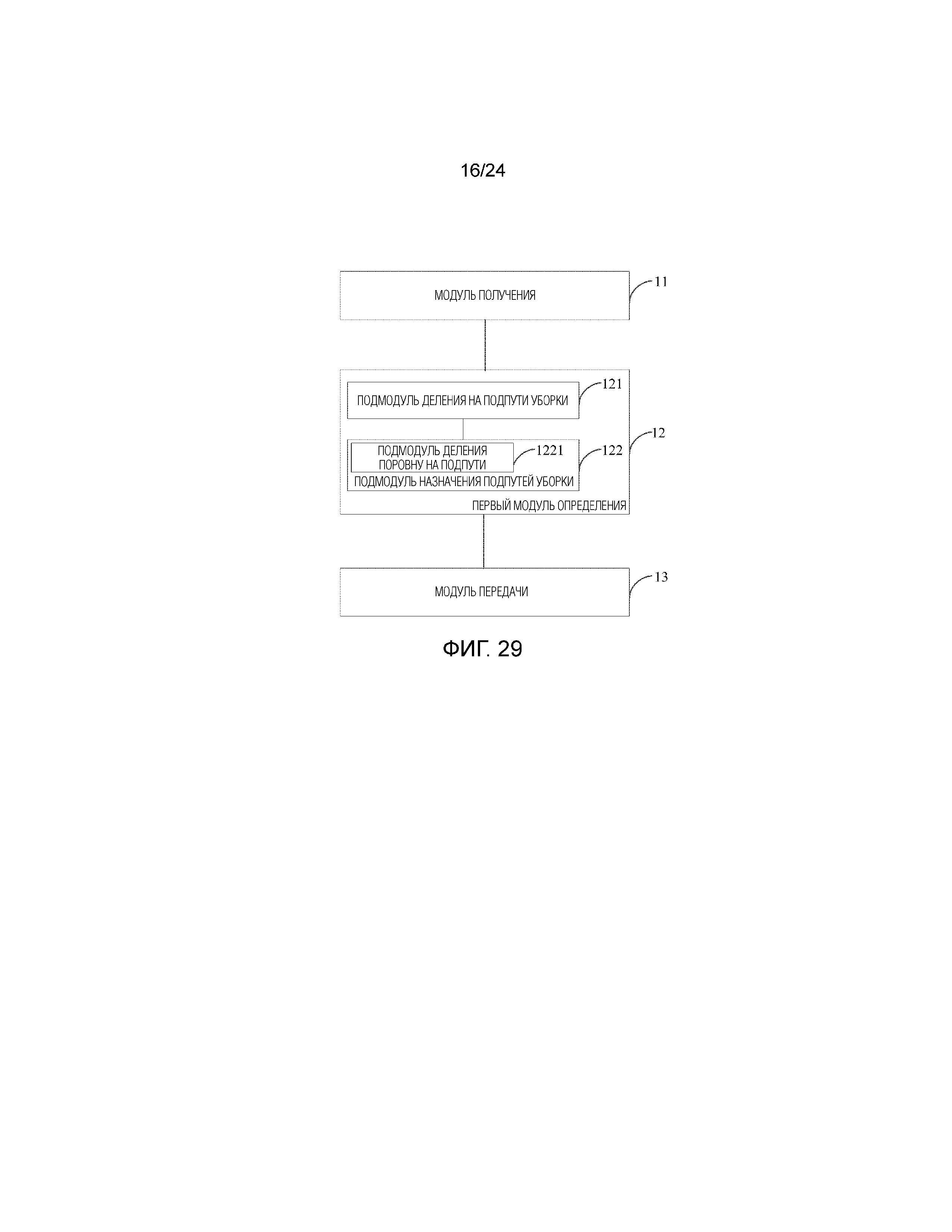
[0046] Согласно варианту осуществления, информация задания на уборку включает в себя путь уборки, и информация управления уборкой включает в себя подпути уборки.
[0047] Первый модуль определения включает в себя подмодуль деления на подпути уборки и подмодуль назначения подпутей уборки.
[0048] Подмодуль деления на подпути уборки выполнен с возможностью разделения пути уборки в информации задания на уборку на, по меньшей мере, два подпути уборки.
[0049] Подмодуль назначения подпутей уборки выполнен с возможностью назначения каждого из упомянутых подпутей уборки, определенных подмодулем деления на подпути уборки, по меньшей мере, одному роботу для уборки пола в качестве информации управления уборкой для робота для уборки пола, благодаря чему, каждый из упомянутых роботов для уборки пола осуществляет задание на уборку согласно соответствующему подпути уборки.
[0050] Согласно варианту осуществления, упомянутый модуль деления на подпути уборки включает в себя: подмодуль деления поровну на подпути.
[0051] Подмодуль деления поровну на подпути выполнен с возможностью деления поровну пути уборки в информации задания на уборку на, по меньшей мере, два из подпутей уборки.
[0052] Согласно варианту осуществления, упомянутый модуль деления на подпути уборки включает в себя: подмодуль приема подпутей.
[0053] Подмодуль приема подпутей выполнен с возможностью приема от пользователя пути уборки в информации задания на уборку, который делится на, по меньшей мере, два подпути уборки.
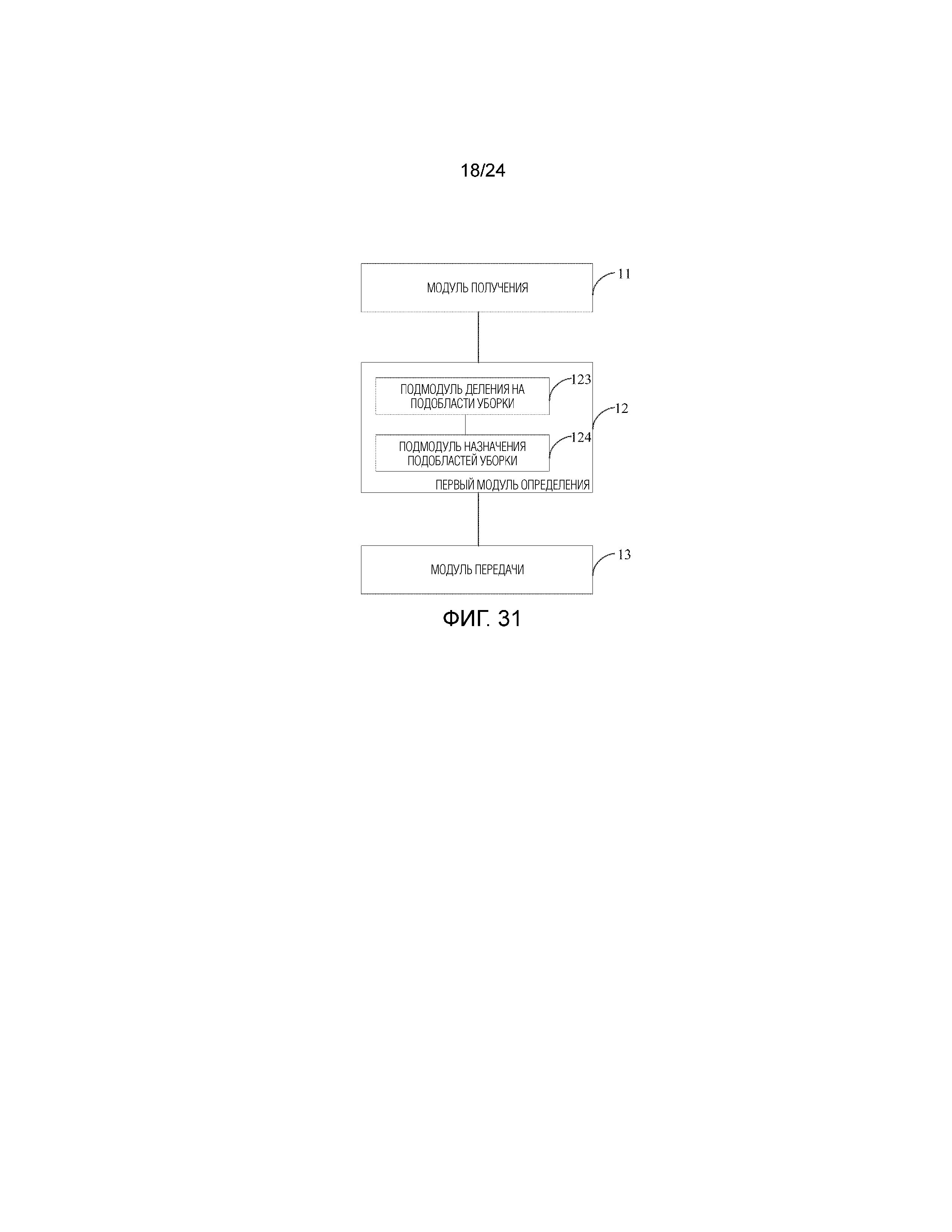
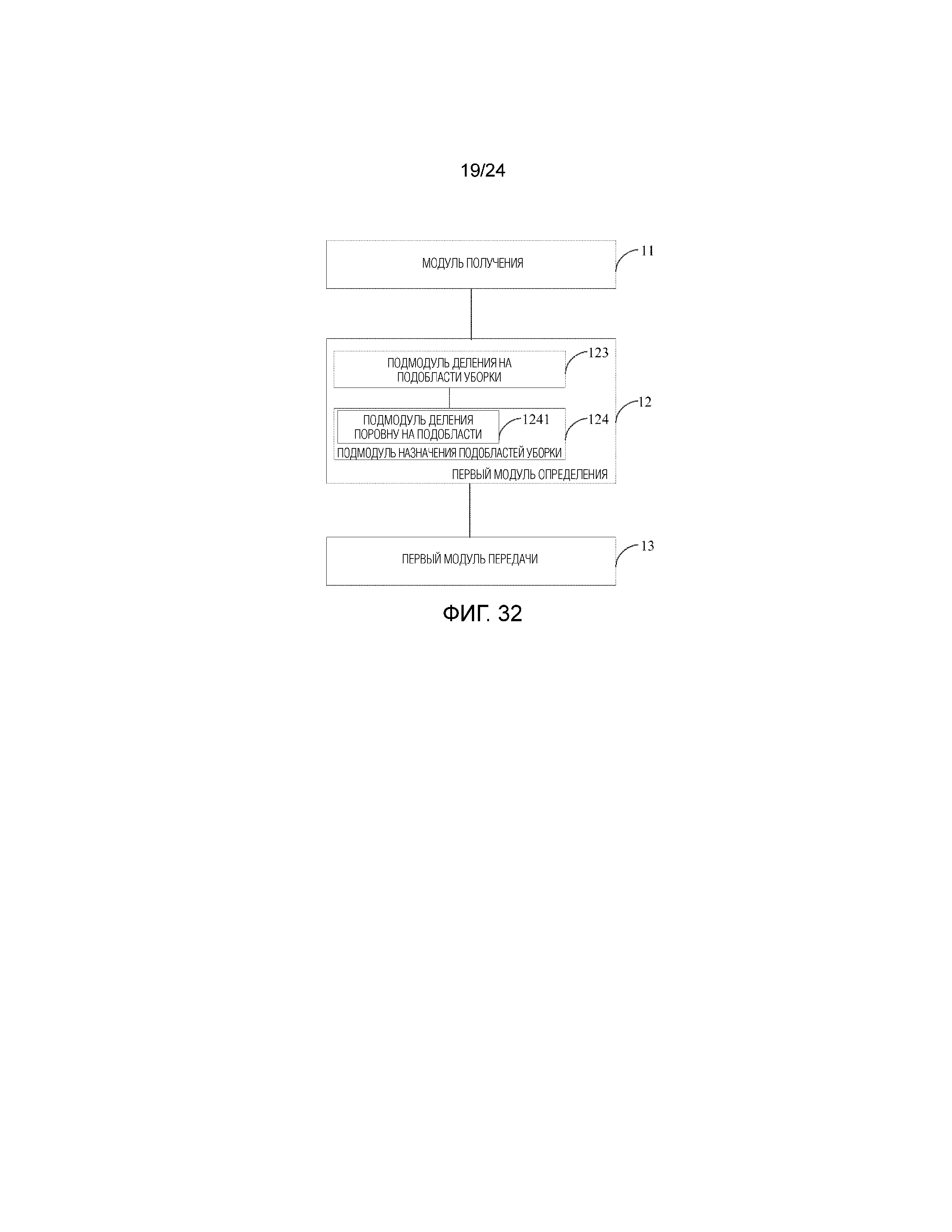
[0054] Согласно варианту осуществления, информация задания на уборку включает в себя область уборки, и информация управления уборкой включает в себя подобласти уборки.
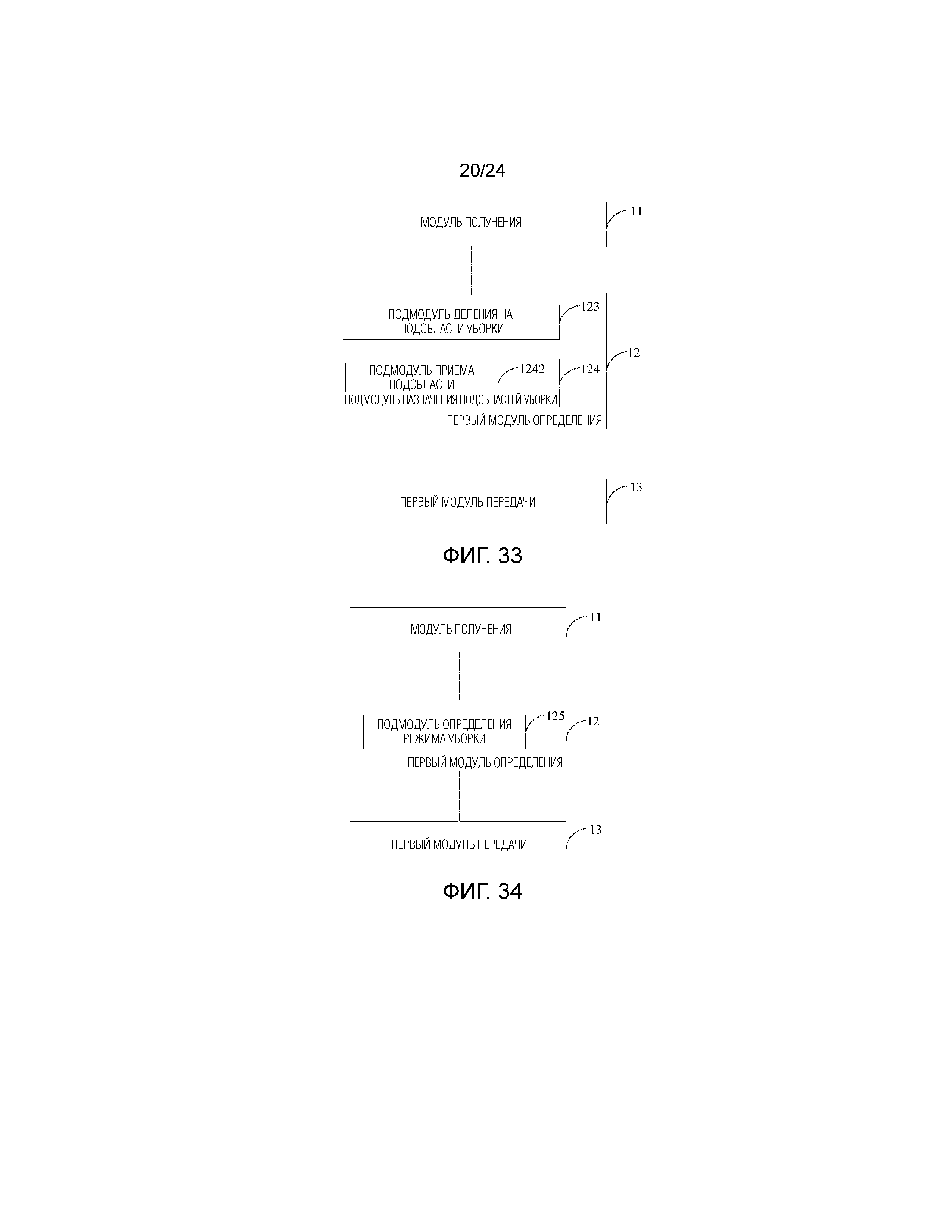
[0055] Первый модуль определения включает в себя подмодуль деления на подобласти уборки и подмодуль назначения подобластей уборки.
[0056] Подмодуль деления на подобласти уборки выполнен с возможностью разделения области уборки в информации задания на уборку на, по меньшей мере, две подобласти уборки.
[0057] Подмодуль назначения подобластей уборки выполнен с возможностью назначения каждой из упомянутых подобластей уборки, по меньшей мере, одному роботу для уборки пола в качестве информации управления уборкой для упомянутого робота для уборки пола, благодаря чему, каждый из упомянутых роботов для уборки пола осуществляет задание на уборку согласно соответствующей назначенной подобласти уборки.
[0058] Согласно варианту осуществления, подмодуль деления на подпути включает в себя подмодуль деления поровну на подобласти.
[0059] Подмодуль деления поровну на подобласти выполнен с возможностью деления поровну области уборки в информации задания на уборку на, по меньшей мере, две из подобластей уборки.
[0060] Согласно варианту осуществления, подмодуль деления на подпути включает в себя подмодуль деления поровну на подобласти.
[0061] Подмодуль деления поровну на подобласти выполнен с возможностью приема от пользователя области уборки в информации задания на уборку, которая делится на, по меньшей мере, две подобласти уборки.
[0062] Согласно варианту осуществления, информация задания на уборку включает в себя уровень чистоты после уборки, и информация управления уборкой включает в себя режим уборки и время начала уборки.
[0063] Первый модуль определения включает в себя подмодуль определения режима уборки.
[0064] Подмодуль определения режима уборки выполнен с возможностью определения режима уборки для каждого робота для уборки пола, который осуществляет задание на уборку в области уборки, согласно уровню чистоты после уборки в информации задания на уборку и времени начала уборки в информации задания на уборку, в качестве информации управления уборкой для робота для уборки пола, благодаря чему, каждый из упомянутых роботов для уборки пола осуществляет задание на уборку в соответствующее время начала уборки согласно соответствующему режиму уборки.
[0065] Согласно варианту осуществления, информация задания на уборку включает в себя продолжительность времени уборки, и первый модуль определения включает в себя подмодуль определения продолжительности времени уборки.
[0066] Подмодуль определения продолжительности времени уборки выполнен с возможностью определения продолжительности времени уборки для, по меньшей мере, двух роботов для уборки пола согласно продолжительности времени уборки в информации задания на уборку, причем продолжительность времени уборки каждого из роботов для уборки пола равна продолжительности времени уборки в информации задания на уборку, благодаря чему, задание на уборку каждого из упомянутых роботов для уборки пола осуществляется в течение продолжительности времени уборки робота для уборки пола.
[0067] Согласно варианту осуществления, устройство дополнительно включает в себя второй модуль (14) передачи.
[0068] Второй модуль (14) передачи выполнен с возможностью передачи информации задания на уборку, полученной модулем 11 получения на главный робот для уборки пола из, по меньшей мере, двух роботов для уборки пола, благодаря чему, главный робот для уборки пола определяет информацию управления уборкой для, по меньшей мере, двух роботов для уборки пола на основании информации задания на уборку.
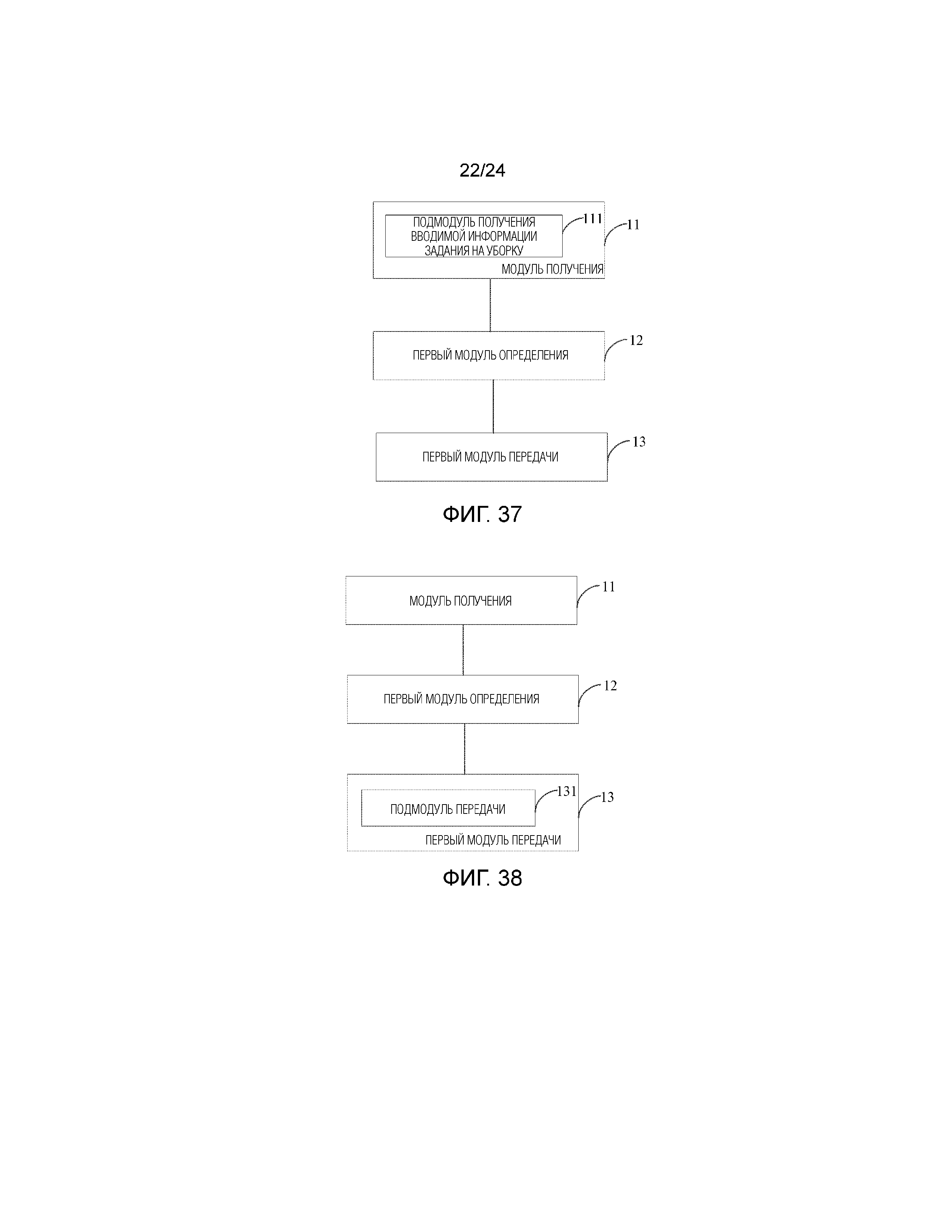
[0069] Согласно варианту осуществления, модуль получения включает в себя подмодуль получения входной информации задания на уборку. Подмодуль получения входной информации задания на уборку выполнен с возможностью получения вводимой информации задания на уборку.
[0070] Согласно варианту осуществления, первый модуль определения включает в себя подмодуль передачи.
[0071] Подмодуль передачи выполнен с возможностью передачи каждой из упомянутой информации управления уборкой на главный робот для уборки пола из, по меньшей мере, двух роботов для уборки пола, благодаря чему, главный робот для уборки пола осуществляет задание на уборку согласно одному фрагменту информации управления уборкой и передачи других фрагментов информации управления уборкой на, по меньшей мере, один вспомогательный робот для уборки пола из, по меньшей мере, двух роботов для уборки пола.
[0072] Согласно варианту осуществления, устройство дополнительно включает в себя второй подмодуль определения.
[0073] Второй подмодуль определения выполнен с возможностью определения главного робота для уборки пола и, по меньшей мере, одного вспомогательного робота для уборки пола из упомянутых, по меньшей мере, двух роботов для уборки пола.
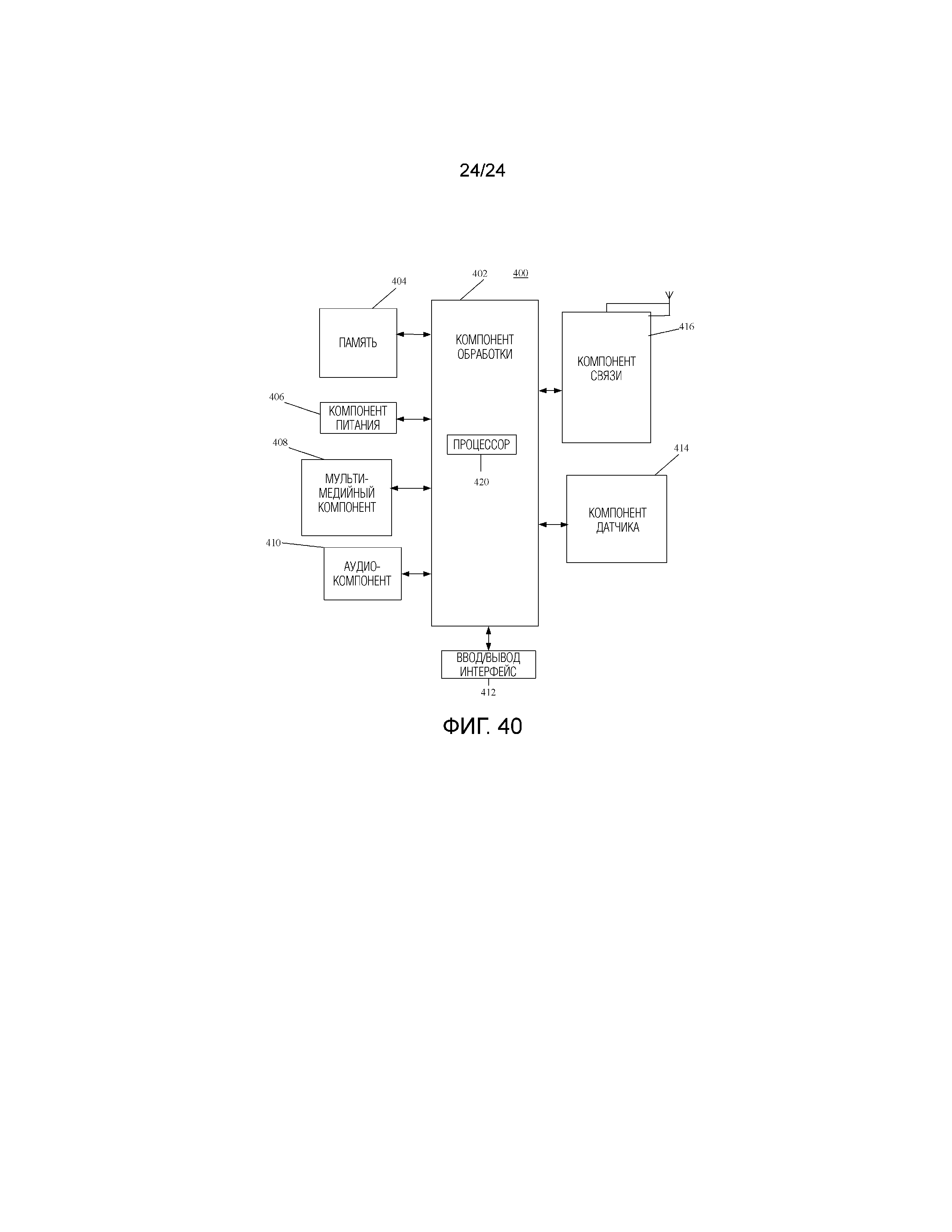
[0074] Согласно третьему аспекту настоящего изобретения, предусмотрено устройство для управления роботами для уборки пола. Устройство включающее в себя:
[0075] процессор;
[0076] память, выполненную с возможностью хранения компьютерно-считываемых инструкций, которые исполняются процессором;
[0077] причем процессор выполнен с возможностью:
[0078] получать информацию задания на уборку, причем информация задания на уборку включает в себя общее задание на уборку;
[0079] определять информацию управления уборкой для, по меньшей мере, двух роботов для уборки пола на основании информации задания на уборку, причем информация управления уборкой включает в себя информацию управления для каждого из роботов для уборки пола; и
[0080] передавать каждую из упомянутой информации управления уборкой на соответствующий робот для уборки пола, благодаря чему, каждый из упомянутых роботов для уборки пола осуществляет задание на уборку согласно соответствующей информации управления уборкой.
[0081] Следует понимать, что вышеприведенное общее описание и нижеследующее подробное описание являются только иллюстративным и пояснительным и не ограничивают объем изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0082] Чертежи включены сюда и составляют часть этого описания изобретения, в котором проиллюстрированы варианты осуществления настоящего изобретения, и, совместно с описанием, служат для объяснения принципов настоящего изобретения.
[0083] Фиг. 1 - блок-схема последовательности операций способа управления роботами для уборки пола согласно иллюстративному варианту осуществления.
[0084] Фиг. 2 - блок-схема интерфейса дисплея управляющего программного обеспечения роботов для уборки пола на оконечном устройстве согласно первому иллюстративному варианту осуществления.
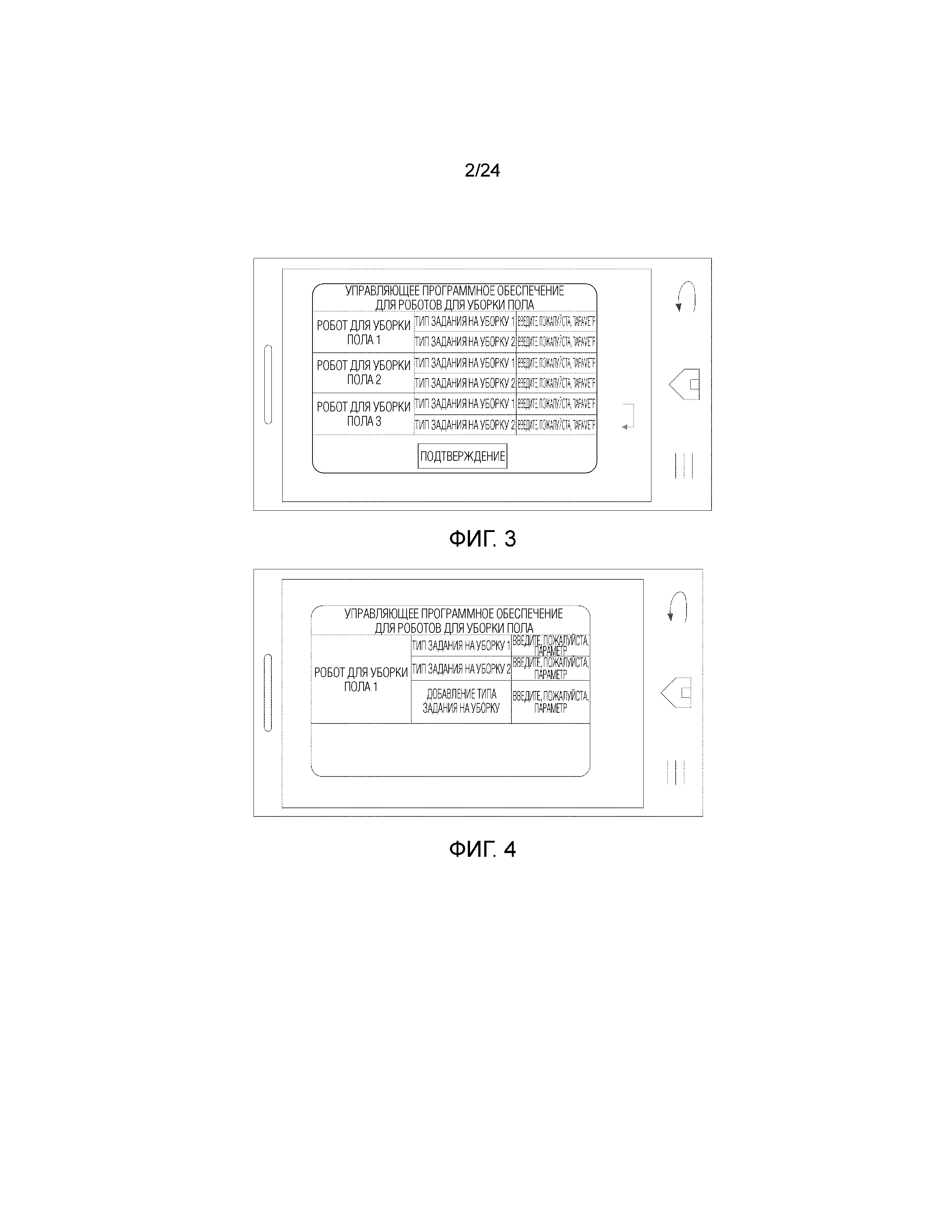
[0085] Фиг. 3 - блок-схема интерфейса дисплея управляющего программного обеспечения роботов для уборки пола на оконечном устройстве согласно второму иллюстративному варианту осуществления.
[0086] Фиг 4 - блок-схема интерфейса дисплея управляющего программного обеспечения роботов для уборки пола на оконечном устройстве согласно третьему иллюстративному варианту осуществления.
[0087] Фиг. 5 - блок-схема интерфейса дисплея управляющего программного обеспечения роботов для уборки пола на оконечном устройстве согласно четвертому иллюстративному варианту осуществления.
[0088] Фиг. 6 - блок-схема интерфейса дисплея управляющего программного обеспечения роботов для уборки пола на оконечном устройстве согласно пятому иллюстративному варианту
осуществления.
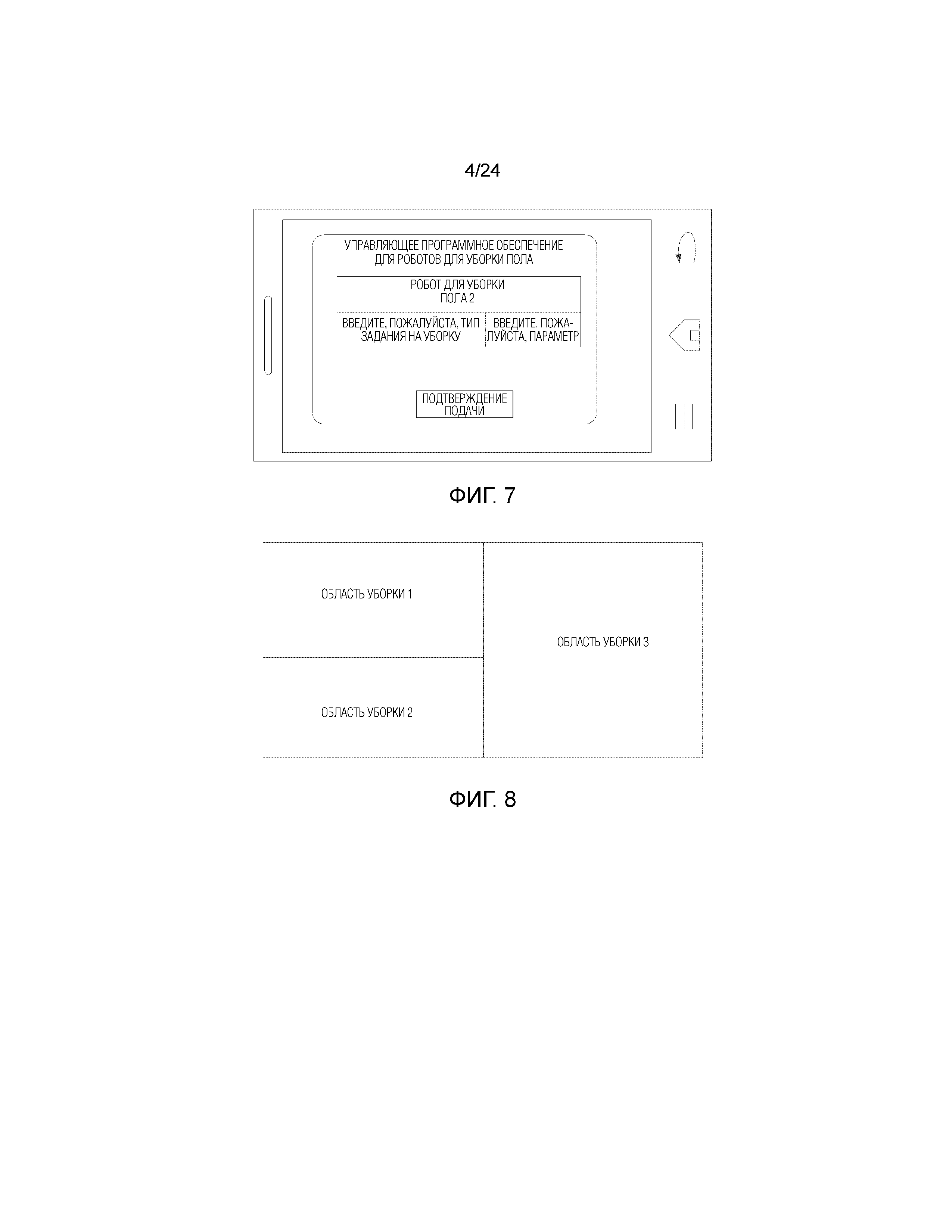
[0089] Фиг. 7 - блок-схема интерфейса дисплея управляющего программного обеспечения роботов для уборки пола на оконечном устройстве согласно шестому иллюстративному варианту осуществления.
[0090] Фиг. 8 - схема деления области уборки согласно иллюстративному варианту осуществления.
[0091] Фиг. 9 - блок-схема интерфейса дисплея управляющего программного обеспечения роботов для уборки пола на оконечном устройстве согласно седьмому иллюстративному варианту осуществления.
[0092] Фиг. 10 - блок-схема интерфейса дисплея управляющего программного обеспечения роботов для уборки пола на оконечном устройстве согласно восьмому иллюстративному варианту осуществления.
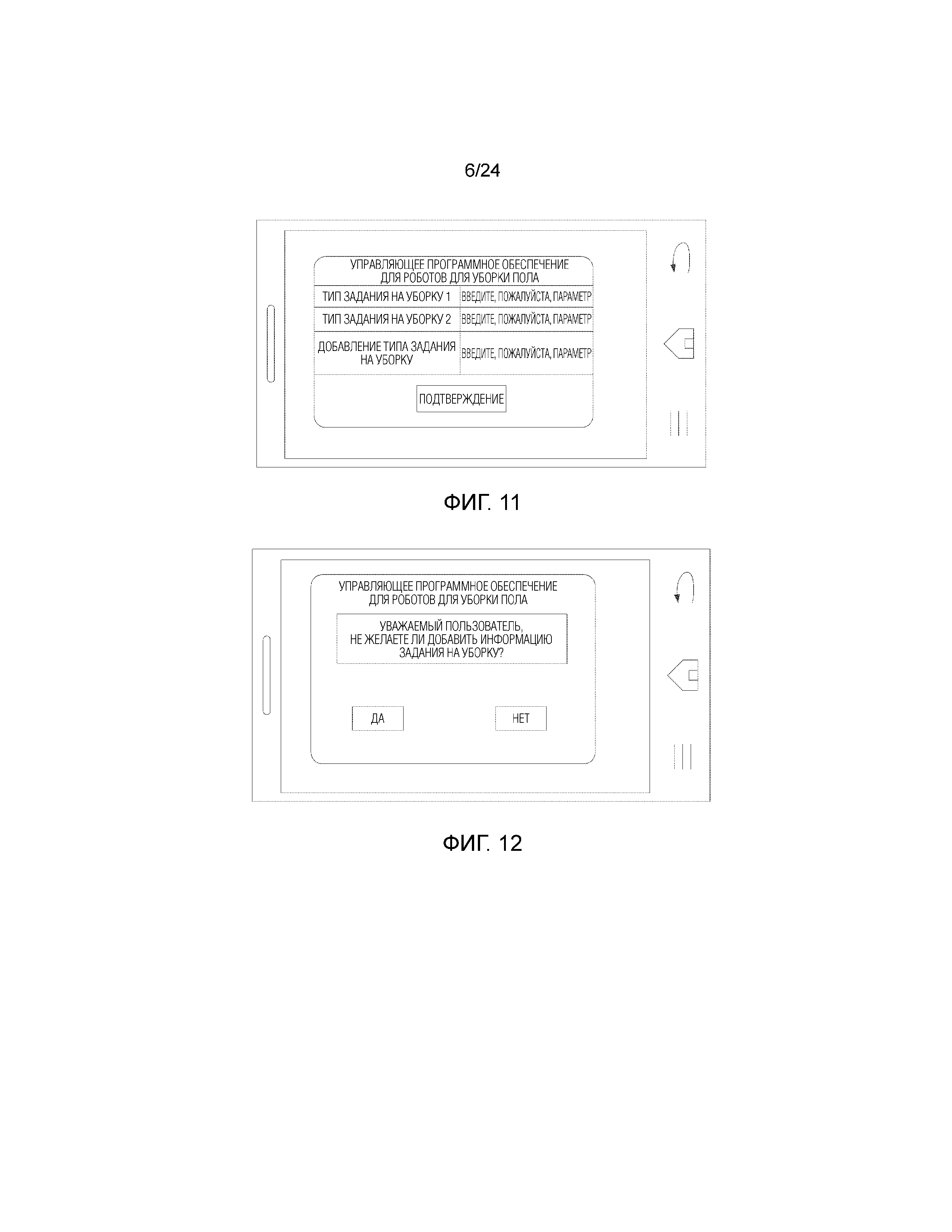
[0093] Фиг. 11 - блок-схема интерфейса дисплея управляющего программного обеспечения роботов для уборки пола на оконечном устройстве согласно девятому иллюстративному варианту осуществления.
[0094] Фиг. 12 - блок-схема интерфейса дисплея управляющего программного обеспечения роботов для уборки пола на оконечном устройстве согласно десятому иллюстративному варианту осуществления.
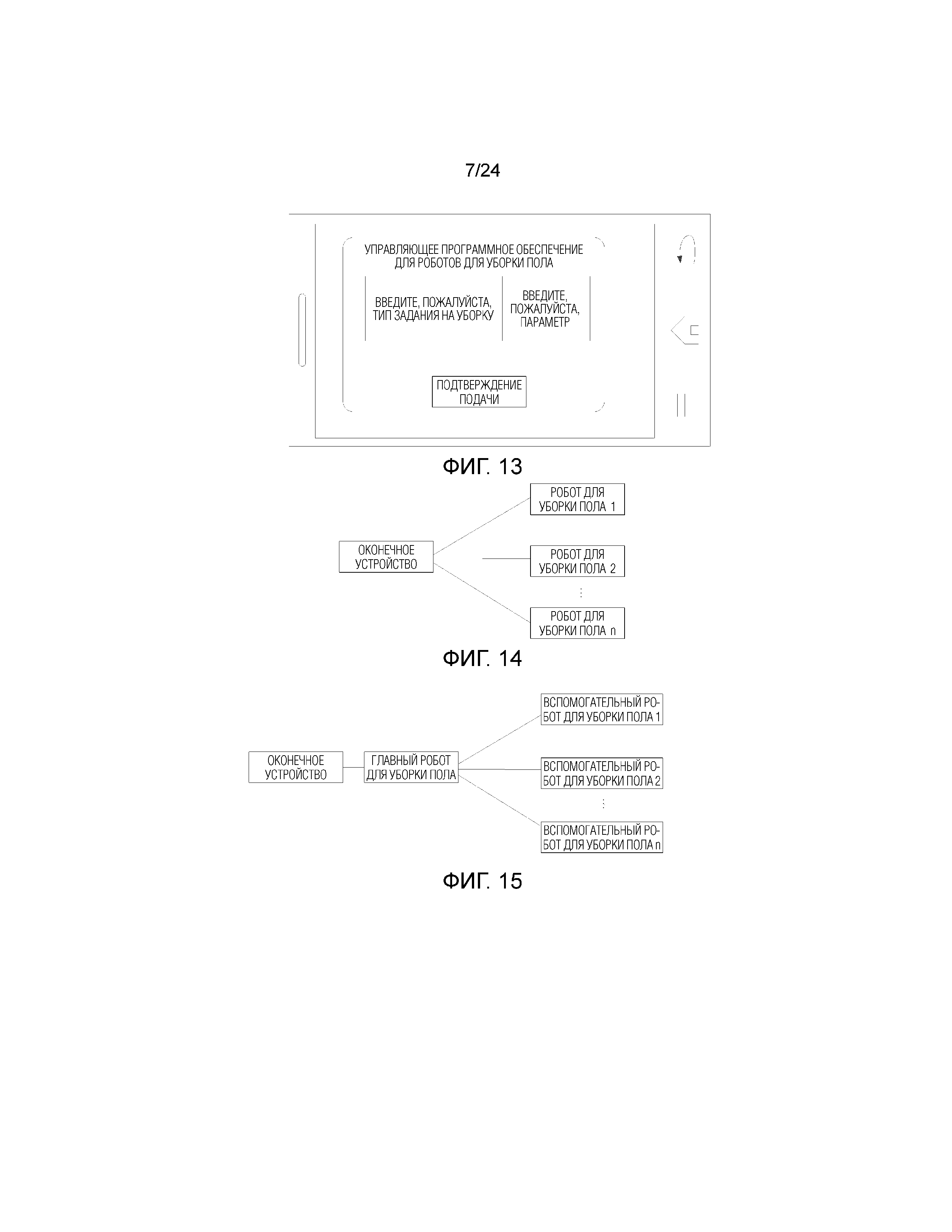
[0095] Фиг. 13 - блок-схема интерфейса дисплея управляющего программного обеспечения роботов для уборки пола на оконечном устройстве согласно одиннадцатому иллюстративному варианту осуществления.
[0096] Фиг. 14 - схема отношений соединения между оконечным устройством и каждым из роботов для уборки пола согласно первому иллюстративному варианту осуществления.
[0097] Фиг. 15 - схема отношений соединения между оконечным устройством и каждым из роботов для уборки пола согласно второму иллюстративному варианту осуществления.
[0098] Фиг. 16 - блок-схема последовательности операций способа реализации этапа S102 согласно первому иллюстративному варианту осуществления.
[0099] Фиг. 17 - схема деления пути уборки согласно иллюстративному варианту осуществления.
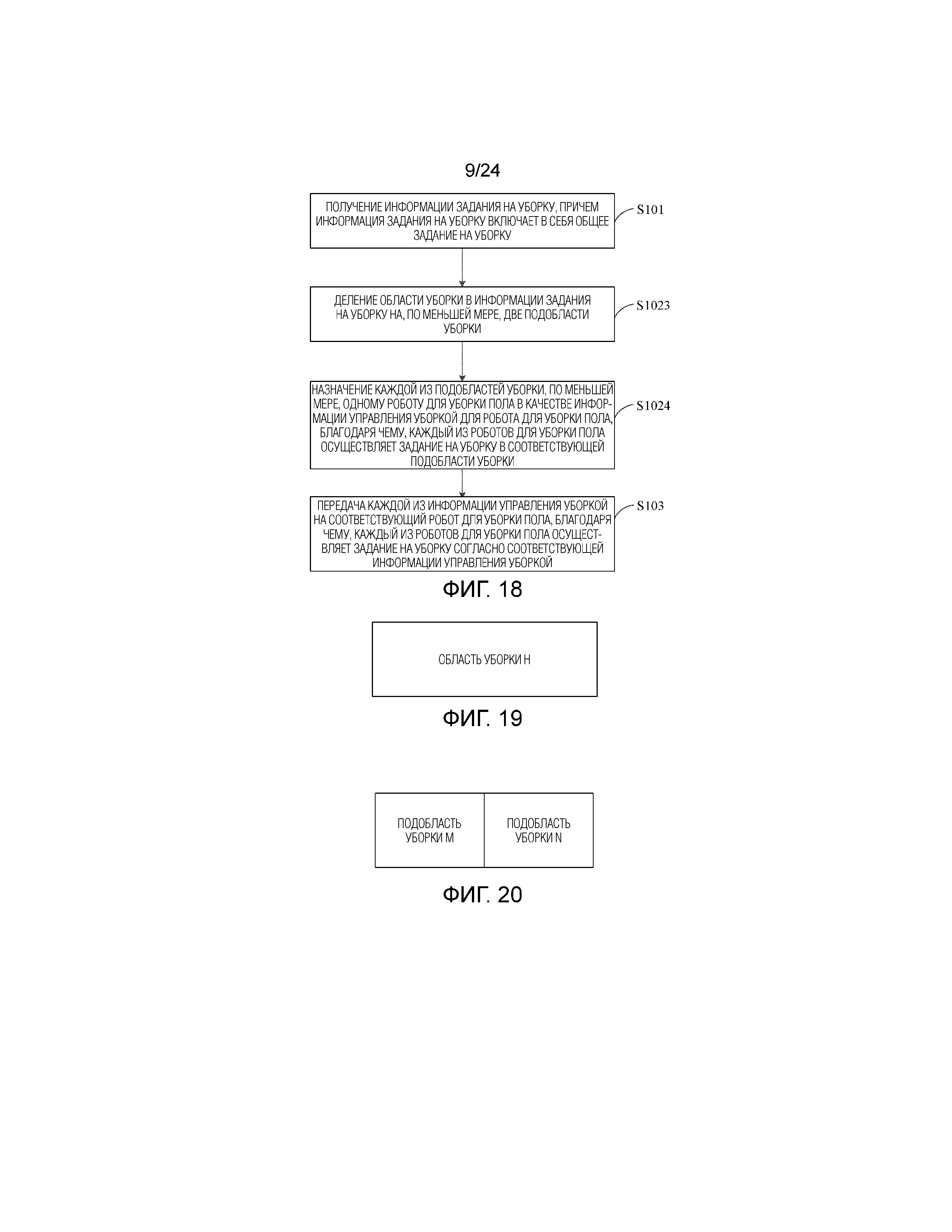
[0100] Фиг. 18 - блок-схема последовательности операций способа реализации этапа S102 согласно второму иллюстративному варианту осуществления.
[00101] Фиг. 19 - схема области уборки согласно иллюстративному варианту осуществления.
[00102] Фиг. 20 - схема деления области уборки согласно иллюстративному варианту осуществления.
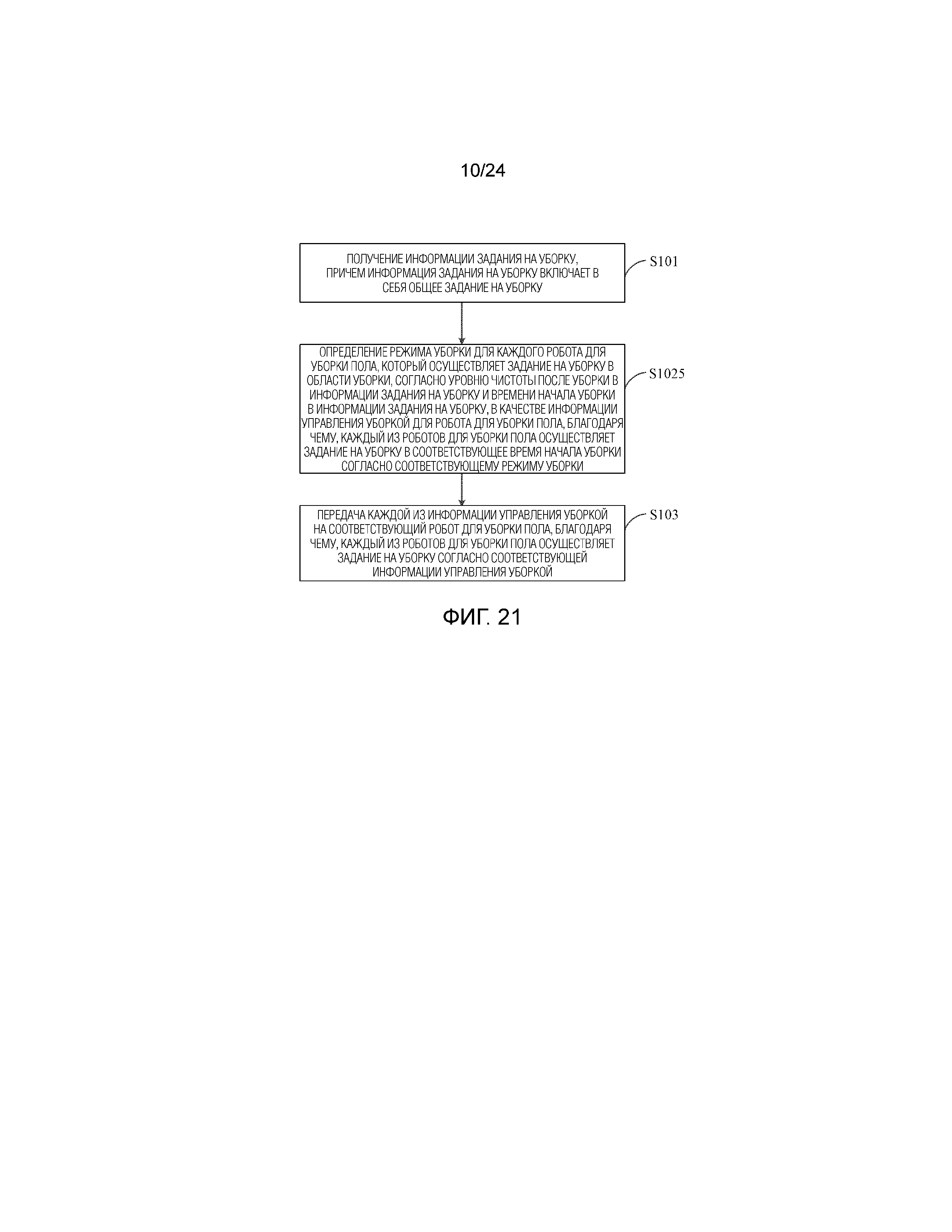
[00103] Фиг. 21 - блок-схема последовательности операций способа реализации этапа S102 согласно третьему иллюстративному варианту осуществления.
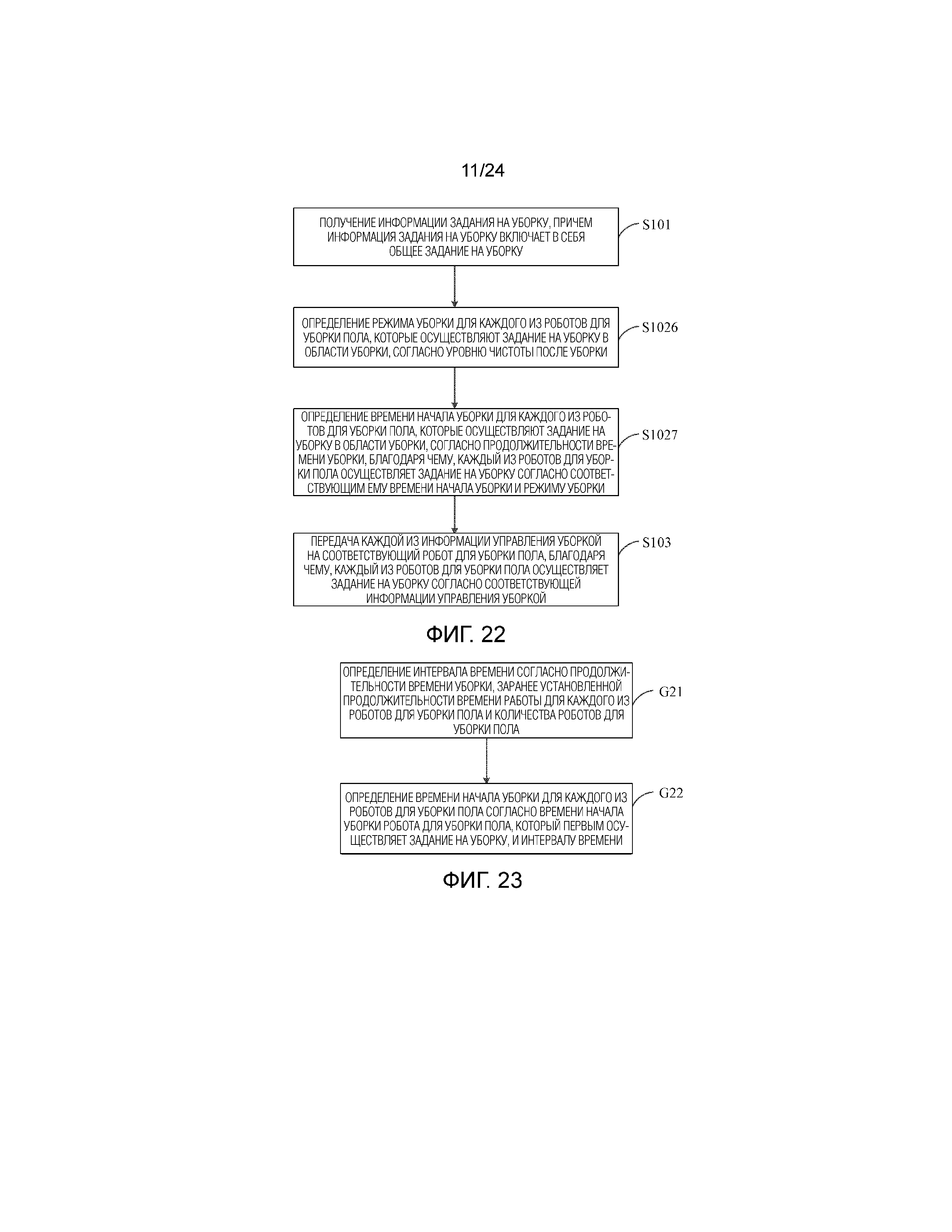
[00104] Фиг. 22 - блок-схема последовательности операций способа реализации этапа S102 согласно четвертому иллюстративному варианту осуществления.
[00105] Фиг. 23 - блок-схема последовательности операций реализации этапа 1027 согласно иллюстративному варианту осуществления.
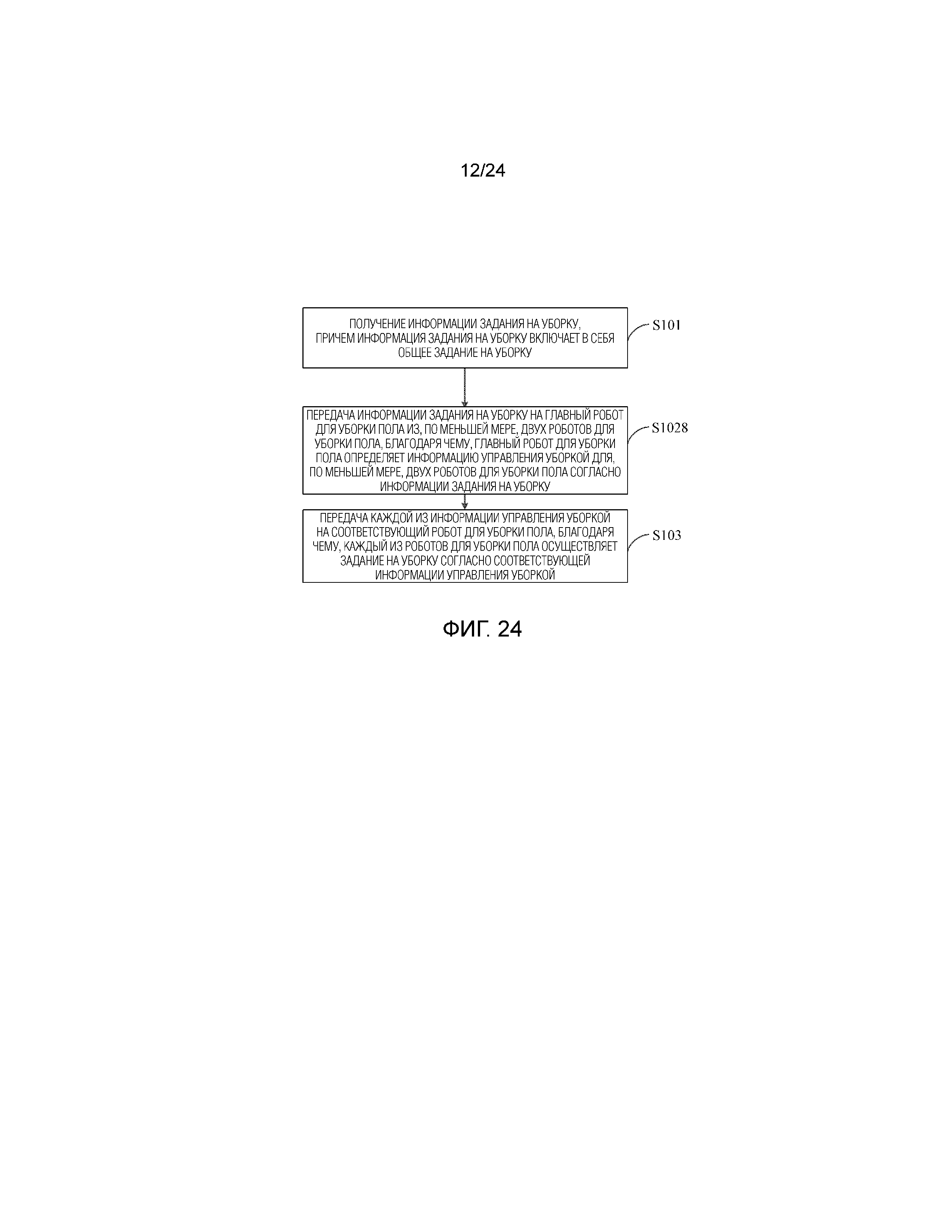
[00106] Фиг. 24 - блок-схема последовательности операций способа реализации этапа S102 согласно пятому иллюстративному варианту осуществления.
[00107] Фиг. 25 - блок-схема последовательности операций способа управления роботами для уборки пола согласно второму иллюстративному варианту осуществления.
[00108] Фиг. 26 - блок-схема последовательности операций способа управления роботами для уборки пола согласно третьему иллюстративному варианту осуществления.
[00109] Фиг. 27 - блок-схема устройства для управления роботами для уборки пола согласно первому иллюстративному варианту осуществления.
[00110] Фиг. 28 - блок-схема первого модуля 12 определения в устройстве для управления роботами для уборки пола согласно первому иллюстративному варианту осуществления.
[00111] Фиг. 29 - блок-схема подмодуля 122 деления на подпути уборки в устройстве для управления роботами для уборки пола согласно первому иллюстративному варианту осуществления.
[00112] Фиг. 30 - блок-схема подмодуля 122 деления на подпути уборки в устройстве для управления роботами для уборки пола согласно второму иллюстративному варианту осуществления.
[00113] Фиг. 31 - блок-схема первого модуля 12 определения в устройстве для управления роботами для уборки пола согласно второму иллюстративному варианту осуществления.
[00114] Фиг. 32 - блок-схема подмодуля деления на подобласти уборки 124 в устройстве для управления роботами для уборки пола согласно первому иллюстративному варианту осуществления.
[00115] Фиг. 33 - блок-схема подмодуля деления на подобласти уборки 124 в устройстве для управления роботами для уборки пола согласно второму иллюстративному варианту осуществления.
[00116] Фиг. 34 - блок-схема первого модуля 12 определения в устройстве для управления роботами для уборки пола согласно третьему иллюстративному варианту осуществления.
[00117] Фиг. 35 - блок-схема первого модуля 12 определения в устройстве для управления роботами для уборки пола согласно четвертому иллюстративному варианту осуществления.
[00118] Фиг.36 - блок-схема устройства для управления роботами для уборки пола согласно второму иллюстративному варианту осуществления.
[00119] Фиг. 37 - блок-схема модуля 11 получения в устройстве для управления роботами для уборки пола согласно иллюстративному варианту осуществления.
[00120] Фиг. 38 - блок-схема первого модуля 13 передачи в устройстве для управления роботами для уборки пола согласно иллюстративному варианту осуществления.
[00121] Фиг. 39 - блок-схема устройства для управления роботами для уборки пола согласно третьему иллюстративному варианту осуществления.
[00122] Фиг. 40 - блок-схема устройства для управления роботами для уборки пола согласно иллюстративному варианту осуществления.
ПОДРОБНОЕ ОПИСАНИЕ
[00123] Далее будет подробно описан иллюстративный вариант осуществления, примеры которого проиллюстрированы в чертежах. В нижеследующем описании, со ссылкой на чертежи, одни и те же ссылочные позиции на разных чертежах обозначают одни и те же или аналогичные элементы, если не указано обратное. Варианты осуществления, описанные в следующих иллюстративных вариантах осуществления, не представляют все варианты осуществления, согласующиеся с настоящим изобретением. Напротив, они являются лишь примерами устройств и способов, согласующихся с некоторыми аспектами настоящего изобретения, как подробно описано в нижеследующей формуле изобретения.
[00124] Настоящий вариант осуществления предусматривает способ управления роботами для уборки пола, который позволяет управлять, по меньшей мере, двумя роботами для уборки пола для совместного осуществления задания на уборку. Способ может осуществляться оконечным устройством, включающим в себя мобильный телефон, планшет, персональный компьютер и т.д.
[00125] На фиг. 1 показана блок-схема последовательности операций способа управления роботами для уборки пола согласно иллюстративному варианту осуществления. Как проиллюстрировано в фиг. 1, способ управления роботами для уборки пола включает в себя следующие этапы S101-S103.
[00126] На этапе S101 получается информация задания на уборку, причем информация задания на уборку включает в себя общее задание на уборку.
[00127] На этапе S102 информация управления уборкой для, по меньшей мере, двух роботов для уборки пола определяется на основании информации задания на уборку, причем информация управления уборкой включает в себя информацию управления для каждого из роботов для уборки пола.
[00128] На этапе S103 каждая из информации управления уборкой передается на соответствующий робот для уборки пола, благодаря чему, каждый из роботов для уборки пола осуществляет задание на уборку согласно соответствующей информации управления уборкой.
[00129] Вариант осуществления настоящего изобретения предусматривает способ управления роботами для уборки пола, который получает информацию задания на уборку, включающий в себя общее задание на уборку, определяет информацию управления уборкой, по меньшей мере, двух роботов для уборки пола согласно информации задания на уборку, причем информация управления уборкой включает в себя информацию управления для каждого из роботов для уборки пола, и затем передает каждую из информации управления уборкой на соответствующий робот для уборки пола, благодаря чему, по меньшей мере, два робота для уборки пола совместно осуществляют задание на уборку, что эффективно повышает эффективность уборки.
[00130] Согласно вышеописанному варианту осуществления, чтобы знать отношение соответствия между информацией управления уборкой и роботами для уборки пола, чтобы каждая из информации управления уборкой правильно передавалась на соответствующий робот для уборки пола, согласно варианту реализации настоящего изобретения, для идентификации роботов для уборки пола можно использовать идентификаторы. В таком случае, информация управления уборкой, по меньшей мере, двух роботов для уборки пола, которая определяется согласно информации задания на уборку, проиллюстрирована в таблице 1. В таблице 1 показаны отношения соответствия между идентификаторами роботов для уборки пола и информацией управления уборкой. Таким образом, отношения соответствия между идентификаторами роботов для уборки пола и информацией управления уборкой могут быть отчетливо известны, при наличии такой таблицы 1.


[00131] Следует отметить, что, типы роботов для уборки пола можно использовать в качестве идентификаторов роботов для уборки пола для идентификации роботов для уборки пола; или, по меньшей мере, два робота для уборки пола могут быть пронумерованы заранее, что позволяет использовать порядковые номера роботов для уборки пола в качестве идентификаторов роботов для уборки пола для идентификации роботов для уборки пола. Настоящее изобретение не призвано ограничивать способ указания идентификаторов роботов для уборки пола каким-либо конкретным образом.
[00132] Один из вариантов реализации для получения информации управления уборкой, по меньшей мере, двух роботов для уборки пола состоит в установлении управляющего программного обеспечения для роботов для уборки пола на оконечном устройстве. Управляющее программное обеспечение для роботов для уборки пола может взаимодействовать с роботами для уборки пола.
[00133] На фиг. 2 показан блок-схема интерфейса дисплея управляющего программного обеспечения для роботов для уборки пола на оконечном устройстве согласно первому иллюстративному варианту осуществления. В настоящем варианте осуществления, пользователь может вручную самостоятельно вводить информацию управления уборкой для каждого из роботов для уборки пола. Как проиллюстрировано в фиг. 2, при условии, что существует три робота для уборки пола, с использованием порядковых номеров роботов для уборки пола в качестве их идентификаторов, интерфейс дисплея управляющего программного обеспечения для роботов для уборки пола на оконечном устройстве включает в себя:
[00134] идентификатор для каждого из роботов для уборки пола (робота 1 для уборки пола, робота 2 для уборки пола, робота 3 для уборки пола), сообщение приглашения (введите, пожалуйста, информацию управления уборкой), которое предлагает пользователю ввести информацию управления уборкой, соответствующую каждому из роботов для уборки пола, и кнопку подтверждения. В таком случае, пользователь может вручную вводить, в положении сообщения приглашения "введите, пожалуйста, информацию управления уборкой", информация управления уборкой, которой соответствует определенный робот для уборки пола. Например, информация управления уборкой включает в себя типы заданий на уборку и конкретные параметры, соответствующие каждому из типов заданий на уборку; и типы заданий на уборку могут включать в себя, по меньшей мере, один из: продолжительности времени уборки, пути уборки, области уборки, режима уборки, времени начала уборки и пр. После того, как пользователь заканчивает вводить информацию управления уборкой, он может щелкать по кнопке подтверждения, и затем управляющее программное обеспечение для роботов для уборки пола на оконечном устройстве передает информацию управления уборкой для каждого из роботов для уборки пола на соответствующий робот для уборки пола.
[00135] Однако пользователю крайне неудобно вручную вводить типы заданий на уборку и конкретные параметры, соответствующие каждому из типов заданий на уборку в информации управления уборкой, вследствие необходимости вводить большой объем данных. На фиг. 3 показана блок-схема интерфейса дисплея управляющего программного обеспечения для роботов для уборки пола на оконечном устройстве согласно второму иллюстративному варианту осуществления. Как проиллюстрировано в фиг. 3, на основании фиг. 2, аналогично, при условии, что существует три робота для уборки пола, и что порядковые номера роботов для уборки пола используются в качестве их идентификаторов, интерфейс дисплея управляющего программного обеспечения роботов для уборки пола на оконечном устройстве включает в себя:
[00136] идентификатор для каждого из роботов для уборки пола (робота 1 для уборки пола, робота 2 для уборки пола и робота 3 для уборки пола), заранее установленные различные типы заданий на уборку (тип 1 задания на уборку и тип 2 задания на уборку), сообщение приглашения (введите, пожалуйста, параметр), которое предлагает пользователю вводить параметры, соответствующие каждому из типов заданий на уборку, и кнопку подтверждения, затем пользователь может вручную вводить, в положении сообщения приглашения "Введите, пожалуйста, параметр", конкретные параметры соответствующего типа задания на уборку, осуществления которого пользователь ожидает от определенного робота для уборки пола. Например, типы управления уборкой включают в себя, по меньшей мере, одно из следующих заданий на уборку: продолжительности времени уборки, пути уборки, области уборки, режима уборки, времени начала уборки и пр. После того, как пользователь заканчивает вводить информацию управления уборкой, он может щелкать по кнопке подтверждения, и затем управляющее программное обеспечение для роботов для уборки пола на оконечном устройстве передает информацию управления уборкой для каждого из роботов для уборки пола на соответствующий робот для уборки пола.
[00137] В таком случае пользователю необходимо только ввести параметры, соответствующие типу задания на уборку без необходимости ввода типа задания на уборку. Следует отметить, что, в таком случае, типы заданий на уборку могут охватывать все типы заданий на уборку маршрутов уборки пола; если параметры, соответствующие определенному типу задания на уборку, не введены, они по умолчанию устанавливаются на определенное значение, или этот тип задания на уборку не осуществляется, что не имеет здесь конкретных ограничений. Более разумно, если тип задания на уборку, отображаемый управляющим программным обеспечением для роботов для уборки пола, не удовлетворяет требованиям пользователя, то пользователь может дополнительно вручную вводить нужный(е) тип(ы) задания на уборку.
[00138] На фиг. 4 показана блок-схема интерфейса дисплея управляющего программного обеспечения для роботов для уборки пола на оконечном устройстве согласно третьему иллюстративному варианту осуществления. Как проиллюстрировано в фиг. 4, настоящий вариант осуществления будет описан в порядке примера со ссылкой на робот 1 для уборки пола. На основании фиг. 3, к типу задания на уборку добавляется вариант "добавление типа задания на уборку", которому соответствует идентификатор робота для уборки пола (робот 1 для уборки пола). Когда пользователю необходимо вручную ввести тип задания на уборку, он может вручную вводить, в положении сообщения приглашения "добавление типа задания на уборку", тип задания на уборку, осуществления которого пользователь ожидает от определенного робота для уборки пола, и затем вручную вводить параметр(ы), соответствующий(е) этому типу задания на уборку в следующем положении, соответствующем "Введите, пожалуйста, параметр".
[00139] На фиг. 5 показана блок-схема интерфейса дисплея управляющего программного обеспечения для роботов для уборки пола на оконечном устройстве согласно четвертому иллюстративному варианту осуществления; на фиг. 6 показана блок-схема интерфейса дисплея управляющего программного обеспечения для роботов для уборки пола на оконечном устройстве согласно пятому иллюстративному варианту осуществления; и на фиг. 7 показана блок-схема интерфейса дисплея управляющего программного обеспечения для роботов для уборки пола на оконечном устройстве согласно шестому иллюстративному варианту осуществления. Как проиллюстрировано в фиг. 5, на основании фиг. 3, когда пользователь щелкает по кнопке подтверждения для подачи информации управления уборкой каждого из роботов для уборки пола, интерфейс дисплея управляющего программного обеспечения для роботов для уборки пола может дополнительно отображать сообщение приглашения "Уважаемый пользователь, не желаете ли добавить тип задания на уборку?" и кнопки, указывающие "да" и "нет". Если пользователь желает добавить некоторый тип задания на уборку, он может щелкнуть по кнопке, указывающей "да"; и в этот момент, интерфейс дисплея управляющего программного обеспечения для роботов для уборки пола отображает интерфейс, проиллюстрированный на фиг. 6. Поскольку в этом варианте осуществления существует три робота для уборки пола, тип задания на уборку может не требоваться добавлять для каждого робота для уборки пола. В таком случае, интерфейс дисплея будет представлять сообщение приглашения "Выберите, пожалуйста, робот для уборки пола, которому нужно добавить тип задания на уборку" а также кнопки, указывающие "робот 1 для уборки пола", "робот 2 для уборки пола" и "робот 3 для уборки пола". Например, если пользователь хочет добавить тип задания на уборку робота 2 для уборки пола, ему необходимо только щелкнуть по кнопке, указывающей "робот 2 для уборки пола", и кнопке, указывающей подтверждение подачи. В этом случае, интерфейс дисплея управляющего программного обеспечения для роботов для уборки пола отображает интерфейс, проиллюстрированный на фиг. 7, и пользователю необходимо только ввести нужный тип задания на уборку в положении "Введите, пожалуйста, тип задания на уборку" и ввести соответствующий(е) параметр(ы) в положении "Введите, пожалуйста, параметр". После того, как пользователь заканчивает ввод, он может щелкнуть по кнопке, указывающей "подтверждение подачи", и затем управляющее программное обеспечение для роботов для уборки пола на оконечном устройстве передает информацию управления уборкой для каждого из роботов для уборки пола, введенную пользователем, на соответствующий робот для уборки пола. Если пользователь не хочет добавлять никакого типа задания на уборку, он может щелкнуть по кнопке, указывающей "нет", и управляющее программное обеспечение для роботов для уборки пола на оконечном устройстве передает информацию управления уборкой для каждого из роботов для уборки пола, введенную пользователем, на соответствующий робот для уборки пола.
[00140] Вышеописанный вариант осуществления требует, чтобы пользователь самостоятельно анализировал и разбирал задания на уборку для преобразования разобранного задания на уборку в информацию управления уборкой и назначал его каждому из роботов для уборки пола, чтобы каждый из роботов для уборки пола мог осуществлять назначенное ему задание на уборку. Поскольку пользователь может разбирать задание на уборку и назначать информацию управления уборкой только на основании своего опыта, результат назначения информации управления уборкой может быть не идеальным. То есть, это может приводить к тому, что результат уборки после уборки не столь хорош, как ожидает пользователь. На фиг. 8 показана схема деления области уборки согласно иллюстративному варианту осуществления. Как проиллюстрировано в фиг. 8, в этот момент, пользователь делит область уборки на область 1 уборки, область 2 уборки и область 3 уборки, и предписывает роботу 1 для уборки пола осуществлять задание на уборку в области 1 уборки, предписывает роботу 2 для уборки пола осуществлять задание на уборку в области 2 уборки и предписывает роботу 3 для уборки пола осуществлять задание на уборку в области 3 уборки. Очевидно, область между областью 1 уборки и областью 2 уборки не выделяется диапазону уборки никакого из роботов для уборки пола и вовсе не будет убираться. Дополнительно, как проиллюстрировано в фиг. 8, участки, на которые делятся соответствующие области, не одинаковы; в таком случае, при условии, что все роботы для уборки пола имеют одинаковые способности к уборке, уровень чистоты соответствующих областей уборки, очищенных роботом 1 для уборки пола и роботом 2 для уборки пола, безусловно, будет выше уровня чистоты области 3 уборки, очищенной роботом 3 для уборки пола, за одно и то же время.
[00141] На фиг. 9 показана блок-схема интерфейса дисплея управляющего программного обеспечения для роботов для уборки пола на оконечном устройстве согласно седьмому иллюстративному варианту осуществления. Как проиллюстрировано в фиг. 9, при осуществлении этапов согласно вышеописанному варианту осуществления, интерфейс дисплея управляющего программного обеспечения для роботов для уборки пола на оконечном устройстве содержит сообщение приглашения "пожалуйста, введите информацию задания на уборку" и кнопку подтверждения.
[00142] В этот момент, пользователь может вручную вводить информацию задания на уборку для задания на уборку, которое он/она намеревается осуществлять, и затем щелкает по кнопке подтверждения. Когда управляющее программное обеспечение для роботов для уборки пола получает информацию задания на уборку, оно может определять информацию управления уборкой для каждого из роботов для уборки пола согласно информации задания на уборку. Информация задания на уборку включает в себя типы заданий на уборку и конкретные параметры, соответствующие каждому из типов заданий на уборку; и типы заданий на уборку включают в себя любой из пути уборки, области уборки, уровня чистоты после уборки и продолжительности времени уборки, что конкретно не задано в настоящем изобретении. Когда пользователь заканчивает ввод, он может щелкать по кнопке подтверждения для подачи информации задания на уборку в качестве ввода; затем управляющее программное обеспечение для роботов для уборки пола анализирует и разбирает информацию задания на уборку, поданную пользователем согласно информации задания на уборку согласно заранее установленным способам, для определения информации управления уборкой, соответствующей каждому из роботов для уборки пола.
[00143] Однако, согласно такому способу, пользователю требуется вручную вводить типы заданий на уборку и параметр(ы), соответствующий(е) каждому из типов заданий на уборку в информации задания на уборку. Вследствие необходимости вводить большой объем данных, пользователь испытывает неудобство. На фиг. 10 показана блок-схема интерфейса дисплея управляющего программного обеспечения для роботов для уборки пола на оконечном устройстве согласно восьмому иллюстративному варианту осуществления. Как проиллюстрировано в фиг. 10, на основании фиг. 9, интерфейс дисплея управляющего программного обеспечения для роботов для уборки пола на оконечном устройстве включает в себя: каждый из типов заданий на уборку (тип 1 задания на уборку и тип 2 задания на уборку), сообщение приглашения (введите, пожалуйста, параметр), которое предлагает пользователю вводить параметр(ы), соответствующий(е) каждому из типов заданий на уборку, и кнопка подтверждения. В этот момент, пользователь может вручную вводить конкретный(е) параметр(ы) типа задания на уборку в положении сообщения приглашения "Введите, пожалуйста, параметр". Когда пользователь заканчивает ввод, он может щелкать по кнопке подтверждения для подачи информации задания на уборку в качестве ввода; и затем управляющее программное обеспечение для роботов для уборки пола анализирует и разбирает информацию задания на уборку, поданную пользователем согласно информации задания на уборку согласно заранее установленным способам, для определения информации управления уборкой, соответствующей каждому из роботов для уборки пола.
[00144] Согласно вышеописанному способу, пользователю необходимо только ввести конкретный(е) параметр(ы), соответствующий(е) типу задания на уборку без необходимости ввода типа задания на уборку. Следует отметить, что, в таком случае, типы заданий на уборку могут охватывать все типы заданий на уборку маршрутов уборки пола; если параметр(ы), соответствующий(е) определенному типу задания на уборку не введены, он/они по умолчанию устанавливаются на определенную величину, или этот тип задания на уборку не осуществляется, что не имеет здесь конкретных ограничений. Более разумно, если тип задания на уборку, отображаемый управляющим программным обеспечением для роботов для уборки пола, не удовлетворяет требованиям пользователя, то пользователь может дополнительно вручную вводить нужный(е) тип(ы) задания на уборку.
[00145] На фиг. 11 показана блок-схема интерфейса дисплея для управляющего программного обеспечения роботов для уборки пола на оконечном устройстве согласно девятому иллюстративному варианту осуществления. Как проиллюстрировано в фиг. 11, на основании фиг. 10, к типу задания на уборку добавляется вариант "добавление типа задания на уборку". Когда пользователю необходимо вручную ввести тип задания на уборку, он может вручную вводить нужный тип задания на уборку в положении сообщения приглашения "добавление типа задания на уборку", и затем вручную вводить параметр(ы), соответствующий(е) этому типу задания на уборку в следующем положении, соответствующем "Введите, пожалуйста, параметр". По окончании ввода, пользователь может щелкнуть по кнопке подтверждения для подачи информации задания на уборку в качестве ввода; и затем управляющее программное обеспечение для роботов для уборки пола анализирует и разбирает информацию задания на уборку, поданную пользователем, согласно информации задания на уборку согласно заранее установленным способам, для определения информации управления уборкой, соответствующей каждому из роботов для уборки пола.
[00146] На фиг. 12 показана блок-схема интерфейса дисплея управляющего программного обеспечения для роботов для уборки пола на оконечном устройстве согласно десятому иллюстративному варианту осуществления, и на фиг. 13 показана блок-схема интерфейса дисплея управляющего программного обеспечения для роботов для уборки пола на оконечном устройстве согласно одиннадцатому иллюстративному варианту осуществления. Как проиллюстрировано в фиг. 12, на основании фиг. 11, после того, как пользователь щелкает по кнопке подтверждения для подачи информации задания на уборку, интерфейс дисплея управляющего программного обеспечения для роботов для уборки пола может дополнительно отображать сообщение приглашения "Уважаемый пользователь, не желаете ли добавить информацию задания на уборку?" и кнопки, указывающие "да" и "нет". Если пользователь желает добавить информация задания на уборку, он может щелкнуть по кнопке, указывающей "да". В этот момент, интерфейс дисплея управляющего программного обеспечения для роботов для уборки пола отображает интерфейс, проиллюстрированный на фиг. 13, и пользователю необходимо только ввести нужный тип задания на уборку в положении "Введите, пожалуйста, тип задания на уборку" и ввести соответствующий(е) параметр(ы) в положении "Введите, пожалуйста, параметр". После того, как пользователь заканчивает ввод, он может щелкать по кнопке подтверждения подачи, и затем управляющее программное обеспечение для роботов для уборки пола на оконечном устройстве передает информацию управления уборкой для каждого из роботов для уборки пола, введенную пользователем, на соответствующий робот для уборки пола. Когда пользователь не хочет добавлять информацию задания на уборку, он может щелкнуть по кнопке, указывающей "нет", и затем управляющее программное обеспечение для роботов для уборки пола на оконечном устройстве анализирует и разбирает информацию задания на уборку, поданную пользователем, согласно информации задания на уборку согласно заранее установленным способам, для определения информации управления уборкой, соответствующей каждому из роботов для уборки пола.
[00147] Поскольку, по меньшей мере, два робота для уборки пола используются для совместного осуществления задания на уборку, взаимодействие между роботами для уборки пола и оконечным устройством может достигаться несколькими способами. На фиг. 14 показана схема отношений соединения между оконечным устройством и каждым из роботов для уборки пола согласно первому иллюстративному варианту осуществления. Как проиллюстрировано в фиг. 14, согласно варианту реализации, по меньшей мере, два робота для уборки пола имеют одинаковый статус, и оба подключены к оконечному устройству. После получения информации управления уборкой, оконечное устройство может непосредственно передавать информацию управления уборкой, соответствующую каждому из роботов для уборки пола, на соответствующий робот для уборки пола. Следует отметить, что роботы для уборки пола могут быть подключены к оконечному устройству посредством технологии беспроводной связи, например, Bluetooth, Wireless Fidelity (сокращенно Wi-Fi), технологии мобильной связи 3-го поколения (сокращенно 3G) и технологии мобильной связи 4-го поколения (сокращенно 4G) и т.д. При такой реализации, поскольку оконечному устройству требуется передавать информацию управления уборкой для каждого из роботов для уборки пола на соответствующий робот для уборки пола, надежность процесса передачи сравнительно невелика, и весьма вероятно, что роботу для уборки пола не удается принять соответствующую информацию управления уборкой вследствие ненадежного соединения между оконечным устройством и роботом для уборки пола.
[00148] На фиг. 15 показана схема отношений соединения между оконечным устройством и каждым из роботов для уборки пола согласно второму иллюстративному варианту осуществления. Как проиллюстрировано в фиг. 15, согласно другому варианту реализации, главный робот для уборки пола можно определять из, по меньшей мере, двух роботов для уборки пола, благодаря чему, другой(ие) робот(ы) для уборки пола используется в качестве вспомогательного(ых) робота(ов) для уборки пола. В таком случае, оконечному устройству требуется только подключаться к главному роботу для уборки пола, который подключен к каждому из вспомогательных роботов для уборки пола. После приема информации управления уборкой, оконечному устройству требуется только передавать информацию управления уборкой на главный робот для уборки пола; и затем главный робот для уборки пола осуществляет задание на уборку согласно одному фрагменту информации управления уборкой, и передает другую информацию управления уборкой в, по меньшей мере, двух фрагментах информации управления уборкой на, по меньшей мере, один вспомогательный робот для уборки пола по меньшей мере, двух роботов для уборки пола.
[00149] Настоящий вариант осуществления предусматривает способ управления роботами для уборки пола, включающий в себя: передачу каждой из информации задания на уборку на главный робот для уборки пола из, по меньшей мере, двух роботов для уборки пола, благодаря чему, главный робот для уборки пола осуществляет задание на уборку согласно одному фрагменту информации управления уборкой и передает другая информация задания на уборку в, по меньшей мере, двух фрагментах информации управления уборкой на, по меньшей мере, один вспомогательный робот для уборки пола по меньшей мере, двух роботов для уборки пола. Поскольку оконечное устройство подключается только к главному роботу для уборки пола, надежность передачи информации управления уборкой повышается.
[00150] Один из вариантов реализации определения главного робота для уборки пола, как упомянуто выше, состоит в том, что: пользователь предварительно конфигурирует один из, по меньшей мере, двух роботов для уборки пола в качестве главного робота для уборки пола и вводит информацию на оконечное устройство.
[00151] Другой вариант реализации определения главного робота для уборки пола, как упомянуто выше, состоит в том, что: до осуществления способа согласно настоящему изобретению, оконечному устройству требуется осуществлять информационное взаимодействие с, по меньшей мере, двумя роботами для уборки пола для определения главного робота для уборки пола и вспомогательного(ых) робота(ов) для уборки пола. Например, по меньшей мере, два робота для уборки пола могут передавать свои соответствующий эксплуатационные возможности на оконечное устройство, которое затем определяет робот для уборки пола, имеющий максимальную эксплуатационную возможность, в качестве главного робота для уборки пола и определяет оставший(е)ся робот(ы) для уборки пола как вспомогательный(е) робот(ы) для уборки пола.
[00152] Когда информация задания на уборку включает в себя путь уборки, информация управления уборкой включает в себя подпути уборки.
[00153] Согласно варианту осуществления, как
проиллюстрировано в фиг. 16, вышеупомянутый этап S102 может быть реализован как этап S1021 и этап S1022.
[00154] На этапе S1021, путь уборки в информации задания на уборку делится на, по меньшей мере, два подпути уборки.
[00155] На этапе S1022, каждый из подпутей уборки назначается по меньшей мере, одному роботу для уборки пола в качестве информации управления уборкой для робота для уборки пола, благодаря чему, каждый из роботов для уборки пола осуществляет задание на уборку согласно соответствующему подпути уборки.
[00156] Например, пользователь обеспечивается двумя роботами для уборки пола, которые именуются роботом А для уборки пола и роботом В для уборки пола, соответственно. Информация задания на уборку введенную пользователем такова: путь уборки представляет собой путь линейного расстояния между точкой X и точкой Y. В одном из вариантов реализации, как проиллюстрировано в фиг. 17, оконечное устройство делит принятый путь X-Y уборки на два подпути уборки, то есть, подпуть X-Z уборки и подпуть Z-Y уборки, и назначает подпуть X-Z уборки роботу А для уборки пола и подпуть Z-Y уборки на робот В для уборки пола. Затем оконечное устройство передает результаты деления на робот А для уборки пола и робот В для уборки пола, соответственно, в качестве информации управления уборкой. После того, как робот А для уборки пола и робот В для уборки пола принимает свою соответствующую информацию управления уборкой, робот А для уборки пола осуществляет задание на уборку на подпути X-Z уборки, и робот В для уборки пола осуществляет задание на уборку на подпути Z-Y уборки. Поскольку робот А для уборки пола и робот В для уборки пола одновременно осуществляют задание на уборку, продолжительность времени уборки эффективно сокращается.
[00157] Вариант осуществления настоящего изобретения предусматривает способ управления роботами для уборки пола, который делит полученный путь уборки на, по меньшей мере, два подпути уборки, и затем назначает каждый из подпутей уборки, по меньшей мере, одному роботу для уборки пола, благодаря чему, каждый из роботов для уборки пола осуществляет задание на уборку согласно соответствующему подпути уборки. Поскольку путь уборки совместно очищается, по меньшей мере, двумя роботами для уборки пола, продолжительность времени уборки эффективно сокращается, и эффективность уборки повышается.
[00158] Настоящий вариант осуществления обеспечивает следующие два способа деления пути уборки на подпути уборки.
[00159] Первый способ предусматривает деление поровну пути уборки в информации задания на уборку на, по меньшей мере, два подпути уборки.
[00160] Второй способ предусматривает прием от пользователя пути уборки в информации задания на уборку, и его деление на, по меньшей мере, два подпути уборки.
[00161] Согласно второму способу, пользователь может делить путь уборки согласно своим требованиям, т.е. определять подпуть уборки, осуществляемый каждым из роботов для уборки пола.
[00162] Согласно другому варианту реализации, разделять пути уборки не требуется. В таком случае, информация управления уборкой, определяемая оконечным устройством такова: робот А для уборки пола осуществляет задание на уборку от конца X к концу Y, и робот В для уборки пола осуществляет задание на уборку от конца Y к концу X. Затем такая информация управления уборкой передается на робот А для уборки пола и робот В для уборки пола, соответственно. Когда робот А для уборки пола и робот В для уборки пола принимают соответствующую информацию управления уборкой, робот А для уборки пола осуществляет задание на уборку от конца X к концу Y, и робот В для уборки пола осуществляет задание на уборку от конца Y к концу X. Когда робот А для уборки пола и робот В для уборки пола встречаются друг с другом, задание на уборку завершается, что позволяет эффективно экономить время уборки.
[00163] Согласно варианту реализации, оконечное устройство может получать карту места, где роботы для уборки пола осуществляют задания на уборку, в качестве первого варианта выбора, что позволяет пользователю определять путь уборки в настоящем задании на уборку согласно карте. Согласно фиг. 10, в порядке примера, при условии, что типом 1 задания на уборку является просто путь уборки, когда пользователь касается области, где располагается тип 1 задания на уборку пальцем(ами), экран дисплея оконечного устройства будет отображать вышеупомянутую карту; и в этом случае, пользователь может размечать путь уборки (путь уборки может быть прямой линией или искривленной линией) пальцем(ами), благодаря чему, оконечное устройство может получать путь уборки. Один из вариантов реализации для оконечного устройства для получения пути уборки состоит в следующем: интерфейс дисплея оконечного устройства будет отображать кнопку подтверждения, и пользователь щелкает по кнопке подтверждения, разметив путь уборки пальцем(ами); и затем оконечное устройство может получать путь уборки.
[00164] Когда информация задания на уборку включает в себя область уборки, информация управления уборкой включает в себя подобласти уборки.
[00165] Согласно варианту осуществления, как
проиллюстрировано в фиг. 18, вышеупомянутый этап S102 может быть реализован как этапы 1023-1024.
[00166] На этапе S1023 область уборки в информации задания на уборку делится на, по меньшей мере, две подобласти уборки.
[00167] На этапе 1024 каждая из подобластей уборки назначается по меньшей мере, одному роботу для уборки пола в качестве информации управления уборкой для робота для уборки пола, благодаря чему, каждый из роботов для уборки пола осуществляет задание на уборку в соответствующей подобласти уборки.
[00168] Оконечное устройство может получать карту места, где роботы для уборки пола осуществляют задания на уборку, в качестве первого варианта выбора, что позволяет пользователю определять область уборки в настоящем задании на уборку согласно карте. Один из вариантов реализации определения области уборки может включать в себя: пользователь размечает край области уборки на карте, отображаемой оконечным устройством, благодаря чему, оконечное устройство может определять область, ограниченную краем, как область уборки. Согласно фиг. 10, в порядке примера, при условии, что типом 1 задания на уборку является просто область уборки, когда пользователь касается области, где располагается тип 1 задания на уборку пальцем(ами), экран дисплея оконечного устройства будет отображать вышеупомянутую карту; и в этот момент пользователь может размечать край пути уборки вручную, и оконечное устройство может, получив край, получать область уборки. Один из вариантов реализации для оконечного устройства для получения края состоит в том, что: интерфейс дисплея оконечного устройства будет отображать кнопку подтверждения, и пользователь может щелкнуть по кнопке подтверждения, разметив край области уборки; и затем оконечное устройство может получать край.
[00169] Один вариант реализации получения карты состоит в том, что: робот для уборки пола получает карту уборки согласно предыдущим историческим записям уборки и передает карту на оконечное устройство. Другой вариант реализации состоит в том, что: пользователь предварительно сохраняет карту на оконечном устройстве.
[00170] В порядке примера, пользователь владеет двумя роботами для уборки пола, именуемыми роботом А для уборки пола и роботом В для уборки пола, соответственно, как проиллюстрировано в фиг. 19. Пользователь размечает область Н уборки в которой настоящие задание на уборку осуществляется, как проиллюстрировано в фиг. 20. Получив область Н уборки, оконечное устройство делит область Н уборки на подобласть N уборки и подобласть М уборки, назначает подобласть N уборки роботу А для уборки пола и назначает подобласть М уборки роботу В для уборки пола, и передает результаты назначения на робот А для уборки пола и робот А для уборки пола, соответственно, в качестве информации управления уборкой. После того, как робот А для уборки пола и робот В для уборки пола принимает свою соответствующую информацию управления уборкой, робот А для уборки пола осуществляет задание на уборку в подобласти N уборки, и робот В для уборки пола осуществляет задание на уборку в подобласти М уборки. Поскольку робот А для уборки пола и робот В для уборки пола одновременно осуществляют задание на уборку, эффективно экономится время уборки.
[00171] Вариант осуществления настоящего изобретения обеспечивает два варианта деления области уборки на подобласти уборки.
[00172] Первый способ предусматривает деление поровну области уборки в информации задания на уборку на, по меньшей мере, две подобласти уборки.
[00173] Второй способ предусматривает прием от пользователя пути уборки в информации задания на уборку, которая делится на, по меньшей мере, две подобласти уборки.
[00174] Согласно второму способу, пользователь может делить область уборки согласно своим требованиям, т.е. определять подобласть уборки, осуществляемую каждым из роботов для уборки пола, которая является весьма гибкой.
[00175] Вариант осуществления настоящего изобретения предусматривает способ управления роботами для уборки пола, который делит область уборки, полученную на, по меньшей мере, две подобласти уборки, и назначает каждую из подобластей уборки, по меньшей мере, одному роботу для уборки пола, благодаря чему, каждый из роботов для уборки пола очищает соответствующую подобласть уборки. Поскольку, по меньшей мере, два робота для уборки пола используются для совместной очистки области уборки, продолжительность времени уборки эффективно сокращается, и эффективность уборки повышается.
[00176] Когда информация задания на уборку включает в себя уровень чистоты после уборки, информация управления уборкой включает в себя режим уборки и время начала уборки.
[00177] Согласно варианту осуществления, как проиллюстрировано в фиг. 21, вышеупомянутый этап S102 может быть реализован как этап S1025.
[00178] На этапе S1025, определение режима уборки для каждого робота для уборки пола, который осуществляет задание на уборку в области уборки, согласно уровню чистоты после уборки в информации задания на уборку и времени начала уборки в информации задания на уборку, в качестве информации управления уборкой для робота для уборки пола, благодаря чему, каждый из роботов для уборки пола осуществляет задание на уборку в соответствующее время начала уборки согласно соответствующему режиму уборки.
[00179] В порядке примера, пользователь владеет двумя роботами для уборки пола, именуемыми роботом А для уборки пола и роботом В для уборки пола. При сравнительно более низком уровне чистоты области уборки, то есть, когда область уборки загрязнена, сначала можно предписывать роботу А для уборки пола один раз осуществлять задание на уборку согласно режиму уборки "мягкая уборка", и затем предписывать роботу В для уборки пола осуществлять другой раз задание на уборку согласно режиму уборки "усиленная уборка", благодаря чему, уровень чистоты области уборки после уборки может достигать ожидаемого пользователем уровня чистоты. Для сокращения продолжительности времени уборки, можно предписывать роботу В для уборки пола осуществлять задания на уборку после робота А для уборки пола, то есть время начала уборки робота В для уборки пола следует после времени начала уборки робота А для уборки пола. Например, время начала уборки робота В для уборки пола равно 5:30, тогда как время начала уборки робота А для уборки пола равно 5:29, благодаря чему, может достигаться ожидаемый пользователем уровень чистоты при сокращении продолжительности времени уборки.
[00180] Согласно фиг. 10, в порядке примера, при условии, что типом 1 задания на уборку является просто уровень чистоты после уборки, когда пользователь касается области, где располагается тип 1 задания на уборку, открывается выпадающее меню, которое включает в себя различные типы уровней чистоты, например, высокая чистота и средняя чистота. В этот момент, пользователю необходимо только выбрать желаемый уровень чистоты, например, высокую чистоту, и затем оконечное устройство получает "высокую чистоту" в качестве уровня чистоты после уборки и, таким образом, определяет информацию управления уборкой согласно уровню чистоты после уборки.
[00181] Вариант осуществления настоящего изобретения предусматривает способ управления роботами для уборки пола, включающий в себя: определение режима уборки для каждого робота для уборки пола, который осуществляет задание на уборку в области уборки, согласно уровню чистоты после уборки в информации задания на уборку и времени начала уборки в информации задания на уборку, в качестве информации управления уборкой для робота для уборки пола, благодаря чему, каждый из роботов для уборки пола осуществляет задание на уборку в соответствующее время начала уборки согласно соответствующему режиму уборки. Поскольку, по меньшей мере, два робота для уборки пола используются для совместного осуществления уборки для достижения уровня чистоты после уборки, ожидаемого пользователем, эффективно экономится время уборки и эффективность уборки повышается.
[00182] Когда информация задания на уборку включает в себя продолжительность времени уборки, согласно варианту осуществления, вышеупомянутый этап S102 может быть реализован как: определение продолжительности времени уборки для, по меньшей мере, двух роботов для уборки пола согласно продолжительности времени уборки в информации задания на уборку, в котором продолжительность времени уборки для каждого из двух роботов для уборки пола равна продолжительности времени уборки в информации задания на уборку, благодаря чему, каждый из роботов для уборки пола осуществляет задание на уборку в течение продолжительности времени уборки робота для уборки пола.
[00183] В порядке примера, продолжительность времени уборки, содержащаяся в информации задания на уборку, равна 30 мин, продолжительность времени уборки каждого из роботов для уборки пола равна лишь 30 мин, и задание на уборку каждого из роботов для уборки пола будет заканчиваться через 30 мин.
[00184] Вариант осуществления настоящего изобретения предусматривает способ управления роботами для уборки пола, который ограничивает продолжительность времени уборки для каждого из роботов для уборки пола, благодаря чему, робот для уборки пола может осуществлять задание на уборку в течение продолжительности времени уборки таким образом, что задание на уборку останавливается в конце продолжительности времени уборки, что позволяет эффективно экономить энергопотребление робота для уборки пола.
[00185] В других вариантах реализации, вышеупомянутые различные типы информации задания на уборку можно комбинировать. Например, информация задания на уборку может включать в себя уровень чистоты после уборки и продолжительность времени уборки, и информация управления уборкой включает в себя режим уборки и время начала уборки.
[00186] Здесь, как проиллюстрировано в фиг. 22, вышеупомянутый этап S102 может быть реализован как этапы S1026-S1027.
[00187] На этапе S1026, режим уборки для каждого из роботов для уборки пола, которые осуществляют задание на уборку в области уборки определяется согласно уровню чистоты после уборки.
[00188] На этапе S1027, время начала уборки каждого из роботов для уборки пола, которые осуществляют задание на уборку в области уборки определяется согласно продолжительности времени уборки, благодаря чему, каждый из роботов для уборки пола осуществляет задание на уборку согласно соответствующим ему времени начала уборки и режиму уборки.
[00189] Согласно варианту осуществления, как проиллюстрировано в фиг. 23, вышеупомянутый этап S1027 может быть реализован как этап G21 и этап G22.
[00190] На этапе G21, интервал времени определяется согласно продолжительности времени уборки, заранее установленной продолжительности времени работы для каждого из роботов для уборки пола и количеству роботов для уборки пола.
[00191] На этапе G22 время начала уборки каждого из роботов для уборки пола определяется согласно времени начала уборки робота для уборки пола, который первым осуществляет задание на уборку, и интервалу времени.
[00192] Один из вариантов реализации вышеупомянутых этапов G21 и G22 описан ниже.
[00193] Интервал времени определяется на основании
[00194] Время начала уборки каждого из роботов для уборки пола определяется на основании ti=t1+Δt×(i-1), где ti - время начала уборки i-го робота для уборки пола, i - положительное целое число, большее или равное 2, t1 - время начала уборки первого робота для уборки пола, и Δt - интервал времени.
[00195] Следует отметить, что, согласно варианту осуществления, как проиллюстрировано в фиг. 24, вышеупомянутый этап S102 можно также реализовать как этап S1028.
[00196] На этапе S1028 передача информации задания на уборку на главный робот для уборки пола из, по меньшей мере, двух роботов для уборки пола, благодаря чему, главный робот для уборки пола определяет информацию управления уборкой для, по меньшей мере, двух роботов для уборки пола согласно информации задания на уборку. Главный робот для уборки пола определяет информацию управления уборкой для, по меньшей мере, двух роботов для уборки пола согласно информации задания на уборку таким же образом, как оконечное устройство определяет информацию управления уборкой для, по меньшей мере, двух роботов для уборки пола согласно информации задания на уборку, и подробности здесь не повторяются. Согласно варианту реализации, когда главный робот для уборки пола определяет информацию управления уборкой, один фрагмент информации управления уборкой должен назначаться самому главному роботу для уборки пола.
[00197] Дополнительно, согласно вышеприведенным вариантам осуществления, все действия, осуществляемые оконечным устройством, и информация, обрабатываемая оконечным устройством, могут совершаться главным роботом для уборки пола. Исключительно с целью наглядного объяснения рабочего процесса, в порядке примера выше приведено описание со ссылкой на оконечное устройство.
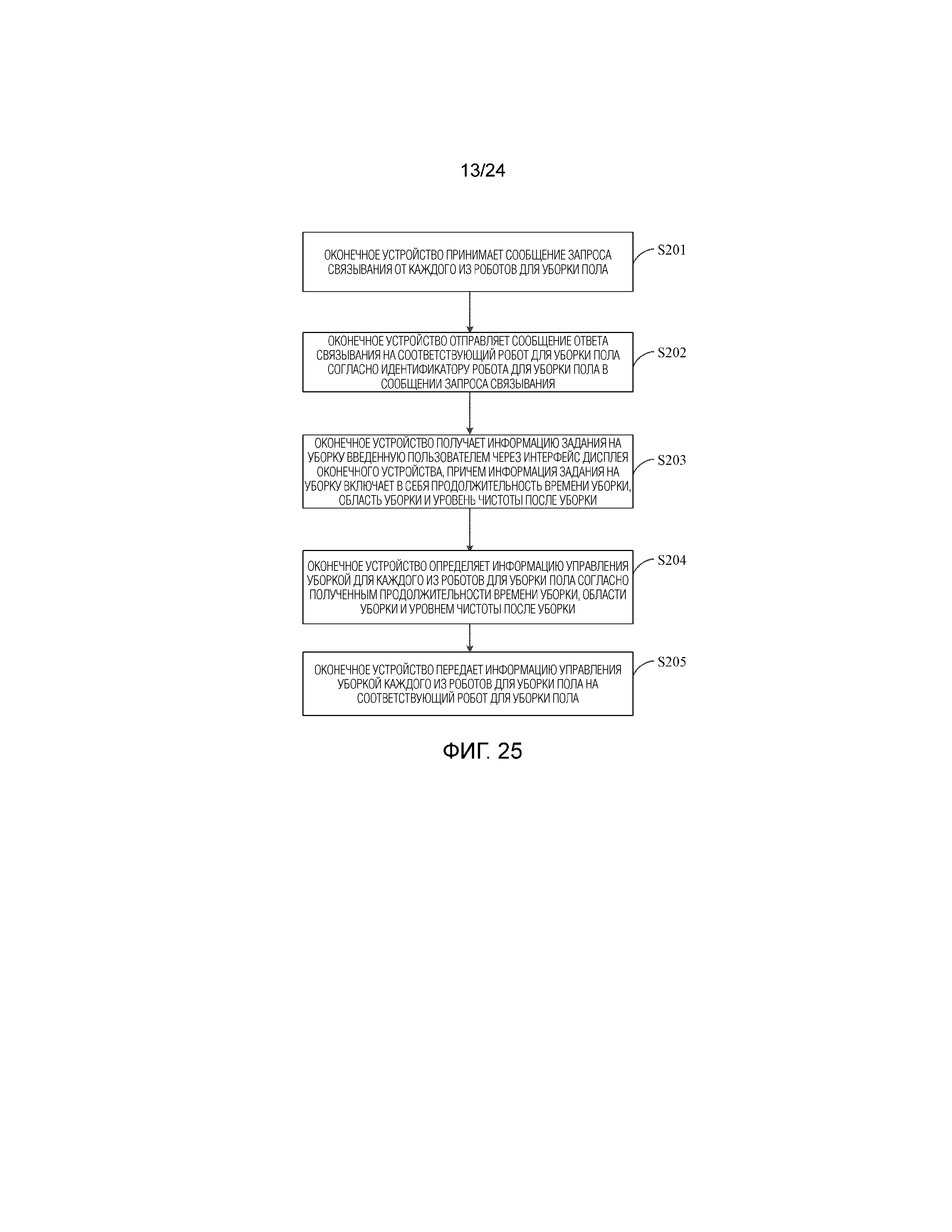
[00198] На фиг. 25 показана блок-схема последовательности операций способа управления роботами для уборки пола согласно второму иллюстративному варианту осуществления. В настоящем варианте осуществления, для более наглядного описания технических решений настоящего изобретения, в порядке примера способ описан со ссылкой на оконечное устройство. Как проиллюстрировано в фиг. 25, способ управления роботами для уборки пола может включать в себя следующие этапы S201-S205.
[00199] На этапе S201, оконечное устройство принимает сообщение запроса связывания от каждого из роботов для уборки пола, в котором переносится идентификатор каждого из роботов для уборки пола.
[00200] На этапе S202, оконечное устройство отправляет сообщение ответа связывания на соответствующий робот для уборки пола согласно идентификатору робота для уборки пола в сообщении запроса связывания.
[00201] На вышеупомянутых этапах S201 и S202, устанавливается линия связи между оконечным устройством и каждый из роботов для уборки пола, благодаря чему: в течение более позднего периода, оконечное устройство может передавать информацию управления уборкой, определяемая для каждого из роботов для уборки пола на соответствующий робот для уборки пола по линии связи, установленной для соответствующего робота для уборки пола.
[00202] На этапе S203 оконечное устройство получает информацию задания на уборку введенную пользователем через интерфейс дисплея оконечного устройства, причем информация задания на уборку включает в себя продолжительность времени уборки, область уборки и уровень чистоты после уборки.
[00203] Например, продолжительность времени уборки равна 20 мин, и уровнем чистоты после уборки является высокая чистота.
[00204] На этапе S204 оконечное устройство определяет информацию управления уборкой для каждого из роботов для уборки пола согласно полученным продолжительности времени уборки, области уборки и уровнем чистоты после уборки.
[00205] Согласно вышеприведенным примерам и при условии, что три робота для уборки пола (т.е. робот А для уборки пола, робот В для уборки пола и робот С для уборки пола) совместно осуществляют задание на уборку, оконечное устройство поровну делит вышеупомянутую область уборки на три подобласти, а именно, подобласть а уборки, подобласть b уборки и подобласть с уборки, соответственно, и передает подобласть а уборки на робот А для уборки пола, передает подобласть b уборки на робот В для уборки пола, и передает подобласть с уборки на робот С для уборки пола. Согласно высокому уровню чистоты после уборки, оконечное устройство определяет, что только каждый из роботов для уборки пола осуществляет усиленную уборку может достигать такого уровня чистоты. В этот момент, оконечное устройство определяет, что режим уборки для каждого из роботов для уборки пола является усиленной уборкой. Таким образом, информация управления уборкой, определенная оконечным устройством для робота А для уборки пола, состоит в том, что: продолжительность времени уборки равна 10 мин, областью уборки является подобласть а уборки, и режимом уборки является усиленная уборка; информация управления уборкой, определенная оконечным устройством для робота В для уборки пола, состоит в том, что: продолжительность времени уборки равна 10 мин, областью уборки является подобласть b уборки, и режимом уборки является усиленная уборка; информация управления уборкой, определенная оконечным устройством для робота С для уборки пола, состоит в том, что: продолжительность времени уборки равна 10 мин, областью уборки является подобласть с уборки, и режимом уборки является усиленная уборка.
[00206] На этапе S205 оконечное устройство передает информацию управления уборкой каждого из роботов для уборки пола на соответствующий робот для уборки пола, благодаря чему, робот для уборки пола осуществляет задание на уборку согласно информации управления уборкой, приняв информацию управления уборкой.
[00207] Согласно вышеприведенным примерам, оконечное устройство передает информацию управления уборкой для робота А для уборки пола на робот А для уборки пола, передает информацию управления уборкой для робота В для уборки пола на робот В для уборки пола, и передает информацию управления уборкой для робота С для уборки пола на робот С для уборки пола. Поскольку каждый из роботов для уборки пола может принимать свою информацию управления уборкой в разные моменты времени, когда робот А для уборки пола принимает соответствующую информацию управления уборкой и обнаруживает, что информация управления уборкой не содержит времени начала уборки, он устанавливает режим уборки на усиленную уборка в реальном времени, конфигурирует свою собственную продолжительность времени уборки равной 10 мин, и начинает осуществлять усиленную уборку в подобласти а уборки в течение 10 мин; операции, осуществляемые роботом В для уборки пола и роботом С для уборки пола аналогичны операциям, осуществляемым роботом А для уборки пола, и здесь повторно не описаны.
[00208] Оконечное устройство в настоящем варианте осуществления также может быть главным роботом для уборки пола, описанным согласно вышеприведенным вариантам осуществления.
[00209] Вариант осуществления настоящего изобретения предусматривает способ управления роботами для уборки пола, включающий в себя: каждый из роботов для уборки пола сначала связывается с оконечным устройством; и затем оконечное устройство получает информацию задания на уборку введенную пользователем через интерфейс дисплея оконечного устройства, определяет информацию управления уборкой для каждого из роботов для уборки пола согласно полученной информации задания на уборку и передает информацию управления уборкой на соответствующие роботы для уборки пола; наконец, приняв информацию управления уборкой, робот для уборки пола осуществляет задание на уборку согласно информации управления уборкой. Благодаря совместному осуществлению задания на уборку несколькими роботами для уборки пола, может эффективно повышаться эффективность уборки.
[00210] На фиг. 26 показана блок-схема последовательности операций способа управления роботами для уборки пола согласно третьему иллюстративному варианту осуществления. В настоящем варианте осуществления, для более наглядного описания решений настоящего изобретения, в порядке примера описано оконечное устройство. Как проиллюстрировано в фиг. 26, способ управления роботами для уборки пола включает в себя следующие этапы S301-S306.
[00211] На этапе S301 оконечное устройство принимает энергию батареи и идентификатор от каждого из роботов для уборки пола.
[00212] На этапе S302 оконечное устройство определяет робот для уборки пола с максимальной энергией батареи в качестве главного робота для уборки пола, согласно энергии батареи каждого из роботов для уборки пола.
[00213] В порядке примера, при условии, что три робота для уборки пола (робот А для уборки пола, робот В для уборки пола и робот С для уборки пола) совместно осуществляют задание на уборку, и что робот В для уборки пола имеет максимальную энергию батареи, оконечное устройство определяет робот В для уборки пола в качестве главного робота для уборки пола и определяет робот А для уборки пола и робот С для уборки пола в качестве вспомогательных роботов для уборки пола.
[00214] На этапе S303 оконечное устройство передает указанное сообщение на главный робот для уборки пола согласно идентификатору главного робота для уборки пола; указанное сообщение призвано извещать, что этот робот для уборки пола является главным роботом для уборки пола, и указывать, что установлена линия связи между оконечным устройством и главным роботом для уборки пола.
[00215] Приняв указанное сообщение, главный робот для уборки пола передает предписывающие сообщения на другие роботы для уборки пола; предписывающие сообщения призваны извещать, что другие роботы для уборки пола являются вспомогательными роботами для уборки пола, и линии связи должны быть установлены. Приняв предписывающие сообщения, вспомогательные роботы для уборки пола отправляют ответные сообщения на главный робот для уборки пола.
[00216] Согласно вышеприведенным примерам, оконечное устройство отправляет указанное сообщение на робот В для уборки пола. Приняв указанное сообщение, робот В для уборки пола передает предписывающие сообщения на робот А для уборки пола и робот С для уборки пола.
[00217] Таким образом, устанавливаются линия связи между главным роботом для уборки пола и оконечным устройством, и линия связи между главным роботом для уборки пола и каждым из вспомогательных роботов для уборки пола, благодаря чему, в более поздний период оконечное устройство может передавать определенную информацию управления уборкой для каждого из роботов для уборки пола на главный робот для уборки пола, который затем передает информацию управления уборкой на каждый из вспомогательных роботов для уборки пола.
[00218] На этапе S304 оконечное устройство получает информацию задания на уборку введенную пользователем через интерфейс дисплея оконечного устройства, причем информация задания на уборку включает в себя продолжительность времени уборки и путь уборки.
[00219] Например, продолжительность времени уборки равна 20 мин.
[00220] На этапе S305 оконечное устройство определяет информацию управления уборкой для каждого из роботов для уборки пола согласно продолжительности времени уборки и полученному пути уборки.
[00221] Согласно вышеприведенному примеру, при условии, что путь уборки имеет длину 60 м, и робот для уборки пола имеет скорость уборки 3 м/мин, одиночный робот для уборки пола может просто закончить один цикл уборки в течение 20 мин, которого, однако, недостаточно для очистки. Поэтому необходимо, чтобы каждый из роботов для уборки пола один раз осуществлял уборку на этом пути уборки; в таком случае, поскольку обеспечено три робота для уборки пола, для достижения цели уборки путь уборки можно очищать три раза. На этом основании, требуется определять время начала уборки для каждого из роботов для уборки пола, благодаря чему, каждый из роботов для уборки пола начинает осуществлять задание на уборку только когда приходит соответствующее время начала уборки, что предотвращает скопление и столкновение роботов для уборки пола. Например, когда оконечное устройство определяет, что время начала уборки робота А для уборки пола равно 4:30, оно определяет время начала уборки робота В для уборки пола как 4:35 и определяет время начала уборки робота С для уборки пола как 4:40, для экономии полной продолжительности времени уборки. Таким образом, информация управления уборкой, определенная оконечным устройством для робота А для уборки пола, включает в себя: продолжительность времени уборки равна 20 мин, время начала уборки равно 4:30, и путь уборки; информация управления уборкой, определенная оконечным устройством для робота В для уборки пола включает в себя: продолжительность времени уборки равна 20 мин, время начала уборки равно 4:35, и путь уборки; информация управления уборкой, определенная оконечным устройством для робота С для уборки пола включает в себя: продолжительность времени уборки равна 20 мин, время начала уборки равно 4:40, и путь уборки.
[00222] На этапе S306, оконечное устройство передает информацию управления уборкой каждого из роботов для уборки пола на главный робот для уборки пола.
[00223] Приняв информацию управления уборкой, главный робот для уборки пола передает информацию управления уборкой каждого из вспомогательных роботов для уборки пола на соответствующий робот для уборки пола, благодаря чему, каждый из роботов для уборки пола осуществляет задание на уборку согласно соответствующей ему информации управления уборкой.
[00224] Согласно вышеприведенному примеру, оконечное устройство передает всю информацию управления уборкой робота А для уборки пола, информацию управления уборкой робота В для уборки пола и информацию управления уборкой робота С для уборки пола на робот В для уборки пола. Приняв информацию управления уборкой всех роботов для уборки пола, робот В для уборки пола передает информацию управления уборкой, соответствующую роботу А для уборки пола, на робот А для уборки пола, и передает информацию управления уборкой, соответствующую роботу С для уборки пола, на робот С для уборки пола.
[00225] После того, как робот В для уборки пола получает свою собственную информацию управления уборкой, поскольку информация управления уборкой содержит путь уборки и время начала уборки, роботу А для уборки пола требуется перемещаться в начальную точку пути уборки и начинать осуществлять задание на уборку в течение 20 мин от 4:30; рабочий процесс робота В для уборки пола и робота С для уборки пола аналогичны операциям, осуществляемым роботом А для уборки пола, и здесь повторно не описан.
[00226] Вариант осуществления настоящего изобретения предусматривает способ управления роботами для уборки пола, включающий в себя: сначала, определение оконечным устройством главного робота для уборки пола и вспомогательного(ых) робота(ов) для уборки пола из роботов для уборки пола, взаимодействующего(их) только с главным роботом для уборки пола; таким образом, оконечное устройство непосредственно передает всю информацию задания на уборку, определенную для роботов для уборки пола, на главный робот для уборки пола, который затем передает информацию задания на уборку на соответствующий(е) вспомогательный(е) робот(ы) для уборки пола, соответственно; наконец, все роботы для уборки пола совместно осуществляют задание на уборку согласно соответствующей принятой информации управления уборкой. Поскольку оконечное устройство взаимодействует только с главным роботом для уборки пола, надежность передачи информации повышается. Кроме того, несколько роботов для уборки пола, совместно осуществляющих задание на уборку, могут эффективно повышать эффективность уборки.
[00227] На фиг. 27 показана блок-схема устройства для управления роботами для уборки пола согласно первому иллюстративному варианту осуществления. Согласно фиг. 27, устройство включает в себя:
[00228] модуль 11 получения, выполненный с возможностью получения информации задания на уборку, причем информация задания на уборку включает в себя общее задание на уборку;
[00229] первый модуль 12 определения, выполненный с возможностью определения информации управления уборкой для, по меньшей мере, двух роботов для уборки пола согласно информации задания на уборку, причем информация управления уборкой включает в себя информацию управления для каждого из роботов для уборки пола;
[00230] первый модуль 13 передачи, выполненный с возможностью передачи каждой из информации управления уборкой на соответствующий робот для уборки пола, благодаря чему, каждый из роботов для уборки пола осуществляет задание на уборку согласно соответствующей информации управления уборкой.
[00231] Согласно варианту осуществления, как проиллюстрировано в фиг. 28, когда информация задания на уборку включает в себя путь уборки, информация управления уборкой включает в себя подпути уборки.
[00232] Первый модуль 12 определения включает в себя подмодуль 121 деления на подпути уборки и подмодуль 122 назначения подпутей уборки.
[00233] Подмодуль 121 деления на подпути уборки выполнен с возможностью разделения пути уборки в информации задания на уборку на, по меньшей мере, два подпути уборки.
[00234] Подмодуль 122 назначения подпутей уборки выполнен с возможностью назначения каждого из подпутей уборки, определенных подмодулем 121 деления на подпути уборки, по меньшей мере, одному роботу для уборки пола в качестве информации управления уборкой для робота для уборки пола, благодаря чему, каждый из роботов для уборки пола осуществляет задание на уборку согласно соответствующему подпути уборки.
[00235] Согласно варианту осуществления, как проиллюстрировано в фиг. 29, модуль 122 деления на подпути уборки включает в себя: подмодуль 1221 деления поровну на подпути.
[00236] Подмодуль 1221 деления поровну на подпути выполнен с возможностью деления поровну пути уборки в информации задания на уборку на, по меньшей мере, два из подпутей уборки.
[00237] Согласно варианту осуществления, как проиллюстрировано в фиг. 30, модуль 122 деления на подпути уборки включает в себя подмодуль 1222 приема подпутей.
[00238] Подмодуль 1222 приема подпутей выполнен с возможностью приема от пользователя пути уборки в информации задания на уборку, который делится на, по меньшей мере, два подпути уборки.
[00239] Согласно варианту осуществления, как проиллюстрировано в фиг. 31, когда информация задания на уборку включает в себя область уборки, информация управления уборкой включает в себя подобласть уборки.
[00240] Первый модуль 12 определения включает в себя подмодуль 123 деления на подобласти уборки и подмодуль 124 назначения подобластей уборки.
[00241] Подмодуль 123 деления на подобласти уборки выполнен с возможностью разделения области уборки в информации задания на уборку на, по меньшей мере, две подобласти уборки.
[00242] Подмодуль 124 назначения подобластей уборки выполнен с возможностью назначения каждой из подобластей уборки, определенной подмодулем 123 деления на подобласти уборки, по меньшей мере, одному роботу для уборки пола в качестве информации управления уборкой для робота для уборки пола, благодаря чему, каждый из роботов для уборки пола осуществляет задание на уборку согласно соответствующей ему подобласти уборки.
[00243] Согласно варианту осуществления, как проиллюстрировано в фиг. 32, подмодуль 124 деления на подпути уборки включает в себя подмодуль 1241 деления поровну на подобласти.
[00244] Подмодуль 1241 деления поровну на подобласти выполнен с возможностью деления поровну области уборки в информации задания на уборку на, по меньшей мере, две подобласти уборки.
[00245] Согласно варианту осуществления, как проиллюстрировано в фиг. 33, подмодуль 124 деления на подпути уборки включает в себя подмодуль 1242 приема подобласти.
[00246] Подмодуль 1242 приема подобласти выполнен с возможностью приема от пользователя области уборки в информации задания на уборку, которая делится на, по меньшей мере, две подобласти уборки.
[00247] Согласно варианту осуществления, как проиллюстрировано в фиг. 34, когда информация задания на уборку включает в себя уровень чистоты после уборки, информация управления уборкой включает в себя режим уборки и время начала уборки.
[00248] Первый модуль 12 определения включает в себя подмодуль 125 определения режима уборки.
[00249] Подмодуль 125 определения режима уборки выполнен с возможностью определения режима уборки для каждого робота для уборки пола, который осуществляет задание на уборку в области уборки, согласно уровню чистоты после уборки в информации задания на уборку и времени начала уборки в информации задания на уборку, в качестве информации управления уборкой для робота для уборки пола, благодаря чему, каждый из роботов для уборки пола осуществляет задание на уборку в соответствующее время начала уборки согласно соответствующему режиму уборки.
[00250] Информация задания на уборку включает в себя продолжительность времени уборки. Согласно варианту осуществления, как проиллюстрировано в фиг. 35, первый модуль 12 определения включает в себя подмодуль 126 определения продолжительности времени уборки.
[00251] Подмодуль 126 определения продолжительности времени уборки выполнен с возможностью определения продолжительности времени уборки для, по меньшей мере, двух роботов для уборки пола согласно продолжительности времени уборки в информации задания на уборку, причем продолжительность времени уборки каждого из роботов для уборки пола равна продолжительности времени уборки в информации задания на уборку, благодаря чему, каждый из роботов для уборки пола осуществляет задание на уборку в течение продолжительности времени уборки робота для уборки пола.
[00252] Согласно варианту осуществления, как проиллюстрировано в фиг. 36, устройство дополнительно включает в себя второй модуль 14 передачи.
[00253] Второй модуль 14 передачи выполнен с возможностью передачи информации задания на уборку, полученной модулем 11 получения на главный робот для уборки пола из, по меньшей мере, двух роботов для уборки пола, благодаря чему, главный робот для уборки пола определяет информацию управления уборкой для, по меньшей мере, двух роботов для уборки пола согласно информации задания на уборку.
[00254] Согласно варианту осуществления, как проиллюстрировано в фиг. 37, модуль 11 получения включает в себя подмодуль 111 получения вводимой информации задания на уборку.
[00255] Подмодуль 111 получения вводимой информации задания на уборку выполнен с возможностью получения информации задания на уборку при вводе.
[00256] Согласно варианту осуществления, как проиллюстрировано в фиг. 38, первый модуль 13 передачи включает в себя подмодуль 131 передачи.
[00257] Подмодуль 131 передачи выполнен с возможностью передачи каждой из информации управления уборкой, определенной первым модулем 12 определения, на главный робот для уборки пола из, по меньшей мере, двух роботов для уборки пола, благодаря чему, главный робот для уборки пола осуществляет задание на уборку согласно одному фрагменту информации управления уборкой и передает другие фрагменты информации управления уборкой на, по меньшей мере, один вспомогательный робот для уборки пола из, по меньшей мере, двух роботов для уборки пола.
[00258] Согласно варианту осуществления, как проиллюстрировано в фиг. 39, устройство дополнительно включает в себя второй подмодуль 15 определения.
[00259] Второй подмодуль 15 определения выполнен с возможностью определения главного робота для уборки пола и, по меньшей мере, одного вспомогательного робота для уборки пола из, по меньшей мере, двух роботов для уборки пола.
[00260] Вариант осуществления настоящего варианта осуществления дополнительно предусматривает устройство для управления роботами для уборки пола, включающее в себя процессор и память, выполненную с возможностью хранения компьютерно-считываемых инструкций, исполнимых процессором. Процессор выполнен с возможностью: получать информацию задания на уборку, причем информация задания на уборку включает в себя общее задание на уборку; определять информацию управления уборкой для, по меньшей мере, двух роботов для уборки пола согласно информации задания на уборку, причем информация управления уборкой включает в себя информацию управления для каждого из роботов для уборки пола; и передавать каждую из информации управления уборкой на соответствующий робот для уборки пола, благодаря чему, каждый из роботов для уборки пола осуществляет задание на уборку согласно соответствующей информации управления уборкой.
[00261] Вышеупомянутый процессор может быть дополнительно дополнительно сконфигурирован нижеследующим образом.
[00262] Информация задания на уборку включает в себя область уборки, и информация управления уборкой включает в себя подобласти уборки.
[00263] Определение информации управления уборкой для, по меньшей мере, двух роботов для уборки пола согласно информации задания на уборку включает в себя: деление пути уборки в информации задания на уборку на, по меньшей мере, два подпути уборки; назначение каждого из подпутей уборки, по меньшей мере, одному роботу для уборки пола в качестве информации управления уборкой для робота для уборки пола, благодаря чему, каждый из роботов для уборки пола осуществляет задание на уборку согласно соответствующему подпути уборки.
[00264] Деление пути уборки в информации задания на уборку на, по меньшей мере, два подпути уборки включает в себя: деление поровну пути уборки в информации задания на уборку на, по меньшей мере, два подпути уборки; или прием от пользователя пути уборки в информации задания на уборку, который делится на, по меньшей мере, два подпути уборки.
[00265] Информация задания на уборку включает в себя область уборки, и информация управления уборкой включает в себя подобласти уборки.
[00266] Определение информации управления уборкой для, по меньшей мере, двух роботов для уборки пола согласно информации задания на уборку включает в себя: деление области уборки в информации задания на уборку на, по меньшей мере, две подобласти уборки; и назначение каждой из подобластей уборки, по меньшей мере, одному роботу для уборки пола в качестве информации управления уборкой для робота для уборки пола, благодаря чему, каждый из роботов для уборки пола осуществляет задание на уборку согласно соответствующей подобласти уборки.
[0026 7] Деление области уборки в информации задания на уборку на, по меньшей мере, две подобласти уборки включает в себя: деление поровну области уборки в информации задания на уборку на, по меньшей мере, две подобласти уборки; или прием от пользователя области уборки в информации задания на уборку, которая делится на, по меньшей мере, две подобласти уборки.
[00268] Информация задания на уборку включает в себя уровень чистоты после уборки, и информация управления уборкой включает в себя режим уборки и время начала уборки.
[00269] Определение информации управления уборкой для, по меньшей мере, двух роботов для уборки пола согласно информации задания на уборку включает в себя: определение режима уборки и времени начала уборки в информации задания на уборку для каждого робота для уборки пола, который осуществляет задание на уборку в области уборки, согласно уровню чистоты после уборки в информации задания на уборку, в качестве информации управления уборкой для робота для уборки пола, благодаря чему, каждый из роботов для уборки пола осуществляет задание на уборку в соответствующее время начала уборки согласно соответствующему режиму уборки.
[00270] Информация задания на уборку включает в себя продолжительность времени уборки.
[00271] Определение информации управления уборкой для, по меньшей мере, двух роботов для уборки пола согласно информации задания на уборку включает в себя: определение продолжительности времени уборки для, по меньшей мере, двух роботов для уборки пола согласно продолжительности времени уборки в информации задания на уборку, причем продолжительность времени уборки каждого из роботов для уборки пола равна продолжительности времени уборки в информации задания на уборку, благодаря чему, каждый из роботов для уборки пола осуществляет задание на уборку в течение продолжительности времени уборки робота для уборки пола.
[00272] Определение информации управления уборкой для, по меньшей мере, двух роботов для уборки пола согласно информации задания на уборку включает в себя: передачу информации задания на уборку на главный робот для уборки пола из, по меньшей мере, двух роботов для уборки пола, благодаря чему, главный робот для уборки пола определяет информацию управления уборкой для, по меньшей мере, двух роботов для уборки пола согласно информации задания на уборку.
[00273] Получение информации задания на уборку включает в себя: получение информации задания на уборку при вводе.
[00274] Передача каждой из информации управления уборкой на соответствующий робот для уборки пола включает в себя: передачу каждой из информации управления уборкой на главный робот для уборки пола из, по меньшей мере, двух роботов для уборки пола, благодаря чему, главный робот для уборки пола осуществляет задание на уборку согласно одному фрагменту информации управления уборкой и передает другие фрагменты информации управления уборкой на, по меньшей мере, один вспомогательный робот для уборки пола из, по меньшей мере, двух роботов для уборки пола; и дополнительно включает в себя: определение главного робота для уборки пола и, по меньшей мере, одного вспомогательного робота для уборки пола из, по меньшей мере, двух роботов для уборки пола.
[00275] Что касается устройства согласно вышеприведенным вариантам осуществления, конкретные реализации модулей, осуществляющих операции, были подробно описаны со ссылкой на варианты осуществления, относящиеся к соответствующим способам, которые здесь конкретно не объяснены.
[00276] На фиг. 40 показана блок-схема устройства 400 для управления роботами для уборки пола согласно иллюстративному варианту осуществления. Устройство применимо к оконечным устройствам. Например, устройством 400 может быть один из мобильного телефона, компьютера, приемника цифрового вещания, приемопередатчика сообщений, игровой панели управления, планшетого устройства, медицинского устройства, приспособления для фитнеса, персонального цифрового помощника и пр.
[00277] Устройство 400 может включать в себя один или более из следующих компонентов: компонента 402 обработки, памяти 404, компонента 406 питания, мультимедийного компонента 408, аудиокомпонента 410, интерфейса 412 ввода/вывода (I/O), компонента 414 датчика и компонента 416 связи.
[00278] Компонент 402 обработки обычно управляет работой устройства 400 в целом, например, операциями, относящимися к отображению, телефонным вызовам, передаче данных, операции камеры и операции записи. Компонент 402 обработки может включать в себя один или более процессоров 420, выполненных с возможностью исполнения инструкций для выполнения всех или части этапов вышеописанного способа. Кроме того, компонент 402 обработки может включать в себя один или более модулей, обеспечивающих взаимодействие между компонентом 402 обработки и другими компонентами. Например, компонент 402 обработки может включать в себя мультимедийный модуль, обеспечивающий взаимодействие между мультимедийным компонентом 408 и компонентом 402 обработки.
[00279] Память 404 выполнена с возможностью хранения различных типов данных для поддержки операций устройства 400. Примеры этих данных включают в себя: инструкции для любых прикладных программ или способов, осуществляемых на устройстве 400, данные контактов, данные списка контактов, сообщения, изображения, видеозаписи и пр. Память 404 может быть реализован как энергозависимое или энергонезависимое запоминающее устройство любого типа или их комбинация, например, статическая оперативная память (SRAM), электрически стираемая программируемая постоянная память (EEPROM), электрически программируемая постоянная память (EPROM), программируемая постоянная память (PROM), постоянная память (ROM), магнитная память, флеш-память, магнитный диск или оптический диск.
[00280] Компонент 406 питания снабжает различные компоненты электрической энергией. Компонент 406 питания может включать в себя систему управления источником питания, один или более источников питания и другие компоненты, относящиеся к генерации, регулировке и передаче электрической энергии.
[00281] Мультимедийный компонент 408 включает в себя экран, который обеспечивает выходной интерфейс между устройством 400 и пользователем. В некоторых примерах экран может включать в себя жидкокристаллический дисплей (LCD) и сенсорную панель (TP). В случае, когда экран включает в себя сенсорную панель, он может быть реализован как сенсорный экран для приема входных сигналов от пользователя. Панель управления включает в себя один или более датчиков касания для регистрации операций касания и скольжения и жестов на сенсорной панели. Датчик касания может не только регистрировать границу действия касания или скольжения, но и выявлять продолжительность времени и давление, связанные с операцией касания или скольжения. В некоторых примерах, мультимедийный компонент 408 включает в себя переднюю камеру и/или заднюю камеру. Когда устройство 400 находится в рабочем режиме, например, режиме фотосъемки или режиме видеосъемки, передняя камера и/или задняя камера может принимать мультимедийные данные извне. Каждая из передней камеры и задней камеры может представлять собой фиксированную оптическую линзовую систему или может иметь фокусное расстояние и возможности оптической трансфокации.
[00282] Аудиокомпонент 410 выполнен с возможностью вывода и/или ввода аудиосигналов. Например, аудиокомпонент 410 включает в себя микрофон (MIC); когда устройство находится в рабочем режиме, например, режиме вызова, режиме записи и режиме распознавания речи, MIC выполнен с возможностью приема внешних аудиосигналов. Принятые аудиосигналы могут дополнительно храниться в памяти 404 или передаваться через компонент 416 связи. В некоторых примерах, аудиокомпонент 410 дополнительно включает в себя громкоговоритель для вывода аудиосигналов.
[00283] Интерфейс 412 ввода-вывода обеспечивает интерфейс между компонентом 402 обработки и модулем периферийного интерфейса. Вышеупомянутый модуль периферийного интерфейса может представлять собой клавиатуру, колесико-кнопку, кнопку и пр. Кнопка может включать в себя, но без ограничения, кнопку домашней страницы, кнопку громкости звука, кнопку активации и кнопку блокировки.
[00284] Компонент 414 датчика включает в себя один или более датчиков, выполненных с возможностью снабжать устройство 400 оценками состояния различных аспектов. Например, компонент 414 датчика может обнаруживать состояние включения/выключения устройства 400 и относительное расположение компонентов, например, компонент является дисплеем или малой клавиатурой устройства 400; компонент 414 датчика может дополнительно обнаруживать изменение положения устройства 400 или одного компонента устройства 400, обнаруживать, существует ли контакт между пользователем и устройством 400, и обнаруживать ориентацию или ускорение/замедление устройства 400 и изменение температуры устройства 400. Компонент 414 датчика может включать в себя датчик близости, выполненный с возможностью обнаружения существования близлежащего объекта без какого-либо физического контакта. Компонент 414 датчика может дополнительно включать в себя оптический датчик, например, датчик формирования изображения на основе CMOS или CCD, который используется в приложении формирования изображения. В некоторых примерах, компонент 414 датчика может дополнительно включать в себя датчик ускорения, гироскопический датчик, магнитный датчик, датчик давления или датчик температуры.
[00285] Компонент 416 связи выполнен с возможностью облегчения установления беспроводной или проводной связи между устройством 400 и другими устройствами. Устройство 400 может быть подключено к беспроводной сети на основании стандартов связи, например, Wi-Fi, 2G или 3G, или их комбинации. В иллюстративном варианте осуществления, компонент 416 связи принимает широковещательные сигналы или сигналы, связанные с вещанием, от внешней широковещательной системы управления по широковещательным каналам. В иллюстративном варианте осуществления, компонент 416 связи может дополнительно включать в себя модуль ближней бесконтактной связи (NFC) для облегчения услуги соединения. Например, модуль NFC можно реализовать на основании технологии радиочастотной идентификации (RFID), технологии ассоциации по средствам передачи данных в инфракрасном диапазоне (IrDA), технологии ультраширокой полосы (UWB), технологии Bluetooth (ВТ) и других технологий.
[00286] В иллюстративном варианте осуществления устройство 400 можно реализовать посредством одного или более из специализированной интегральной схемы (ASIC), цифрового сигнального процессора (DSP), устройства обработки цифровых сигналов (DSPD), программируемого логического устройства (PLD), вентильной матрицы, программируемой пользователем (FPGA), контроллера, микроконтроллера, микропроцессора и других электронных компонентов, для осуществления вышеупомянутого способа.
[00287] В иллюстративном варианте осуществления, дополнительно обеспечивается постоянный компьютерно-считываемый носитель данных, включающий в себя инструкции, например, память 404, включающая в себя инструкции. Вышеупомянутые инструкции могут выполняться процессором 420 устройства 400 для выполнения вышеупомянутого способа. Например, постоянным компьютерно-считываемым носителем данных может быть ROM, оперативная память (RAM), CD-ROM, лента, флоппи-диск, оптическое запоминающее устройство и пр.
[00288] Постоянный компьютерно-считываемый носитель данных включает в себя инструкции, позволяющие устройству 400 осуществлять вышеупомянутое устройство для управления роботами для уборки пола, при исполнении процессором устройства 400.
[00289] Способ включает в себя: получение информации задания на уборку, причем информация задания на уборку включает в себя общее задание на уборку; определение информации управления уборкой для, по меньшей мере, двух роботов для уборки пола согласно информации задания на уборку, причем информация управления уборкой включает в себя информацию управления для каждого из роботов для уборки пола; передачу каждой из информации управления уборкой на соответствующий робот для уборки пола, благодаря чему, каждый из роботов для уборки пола осуществляет задание на уборку согласно соответствующей информации управления уборкой.
[00290] Специалисты в данной области техники могут предложить другие реализации настоящего изобретения на основании описания и практического применения изобретения. Настоящая заявка призвана охватывать любые вариации, возможности использования или адаптивные модификации настоящего изобретения. Эти вариации, возможности использования или адаптивные модификации следуют общим принципам настоящего изобретения и включают в себя общее знание или традиционные технические средства в уровне техники, которые не раскрыты настоящим изобретением. Описание и варианты осуществления рассматриваются лишь как иллюстративные. Истинные объем и сущность настоящего изобретения указаны в нижеследующей формуле изобретения.
[00291] Очевидно, что, настоящее изобретение не ограничивается этими конкретными структурами, описанными выше и проиллюстрированными в чертежах, и допускает модификацию и изменение, не выходящее за рамки его объема. Объем настоящего изобретения задается только нижеследующей формулой изобретения.
Реферат
Изобретение относится к способу и устройству для управления роботами для уборки пола. Технический результат заключается в расширении средств того же назначения. Способ включает в себя: получение информации задания на уборку, включающей в себя полное задание на уборку; определение информации управления уборкой по меньшей мере двух роботов для уборки пола согласно информации задания на уборку, причем информация управления уборкой включает в себя информацию управления для каждого из роботов для уборки пола; и затем передачу полученной информации управления уборкой на соответствующий робот для уборки пола, чтобы предписывать по меньшей мере двум роботам для уборки пола совместно осуществлять задание на уборку, что повышает эффективность уборки. 3 н. и 17 з.п. ф-лы, 40 ил.
Формула
Документы, цитированные в отчёте о поиске
Автономный пылесос
Робот-пылесос и способ управления этим роботом-пылесосом
Робот-пылесос, система уборки помещения роботом и способ управления роботом
Комментарии