Робот-пылесос и способ управления этим роботом-пылесосом - RU2314557C2
Код документа: RU2314557C2
Чертежи


Описание
ПЕРЕССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
В соответствии с §119 раздела 35 свода законов США приоритет данной заявки утверждается по заявке на патент Кореи №2005-15776, поданной 25 февраль 2005 года, содержание которой целиком включено в данную заявку посредством ссылки. Данная заявка также может иметь отношение к находящейся в общей собственности заявке на патент США №10/682484, поданной 10 октября 2003 года, содержание которой также целиком включено в данную заявку посредством ссылки.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Область техники
Данное изобретение относится к роботу-пылесосу и способу определения местонахождения внешнего зарядного устройства.
Описание уровня техники
Обычно робот-пылесос является автоматически управляемым аппаратом для уборки, который, перемещаясь по очищаемой поверхности, втягивает посторонние вещества, например пыль и/или мусор, с очищаемой поверхности.
При определении контроллером дефицита энергии аккумулятора во время уборки робот-пылесос совершает попытку установить связь с внешним зарядным устройством. Однако при неудаче попытки установить связь с внешним зарядным устройством из-за наличия препятствий (например, мебели или стен) робот-пылесос не имеет возможности немедленно вернуться к внешнему зарядному устройству для подзарядки аккумулятора. Вместо этого робот-пылесос двигается вдоль стены, ограничивающей очищаемую зону, или перемещается случайным образом по очищаемой зоне в попытке установить связь с внешним зарядным устройством.
Робот-пылесос может быть не способен достичь зарядного устройства из-за полного истощения остающейся в аккумуляторе энергии, вызванного бесполезным перемещением робота-пылесоса в поиске внешнего зарядного устройства после обнаружения дефицита энергии аккумулятора.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В одном аспекте данное изобретение предлагается по меньшей мере для устранения вышеуказанных проблем и/или недостатков, а также для создания по меньшей мере описанных ниже преимуществ. Следовательно, одним аспектом данного изобретения является создание робота-пылесоса и способа определения местонахождения внешнего зарядного устройства с возможностью улучшения работы, которое заключается в быстром обнаружении и возврате робота-пылесоса к внешнему зарядному устройству.
С этой целью в одном неограничивающем аспекте данного изобретения предложен робот-пылесос, содержащий движущее средство, предназначенное для приведения в движение колес, передающее/принимающее средство, предназначенное для установки связи с внешним зарядным устройством, и контроллер, предназначенный для управления движущим средством, причем контроллер управляет передающим/принимающим средством с обеспечением установки связи с внешним зарядным устройством во время перемещения по очищаемой поверхности, сохраняет в запоминающем устройстве по меньшей мере одно место установки связи и дополнительно управляет движущим средством для возврата к внешнему зарядному устройству с использованием указанного по меньшей мере одного места установки связи.
В другом неограничивающем аспекте данного изобретения предлагается способ управления роботом-пылесосом, включающий перемещение по очищаемой поверхности, установку связи с внешним зарядным устройством во время перемещения по очищаемой поверхности и хранение в запоминающем устройстве по меньшей мере одного места установки связи, в котором произошла установка связи с внешним зарядным устройством.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Вышеприведенные аспекты и другие особенности данного изобретения будут более очевидны из последующего подробного описания иллюстративных вариантов выполнения со ссылкой на прилагаемые чертежи, на которых:
фиг.1 представляет собой аксонометрический вид робота-пылесоса в соответствии с неограничивающим вариантом выполнения данного изобретения;
фиг.2 представляет собой неограничивающую структурную схему робота-пылесоса в соответствии с одним вариантом выполнения данного изобретения;
фиг.3 представляет собой блок-схему, иллюстрирующую способ управления роботом-пылесосом в соответствии с неограничивающим вариантом выполнения данного изобретения;
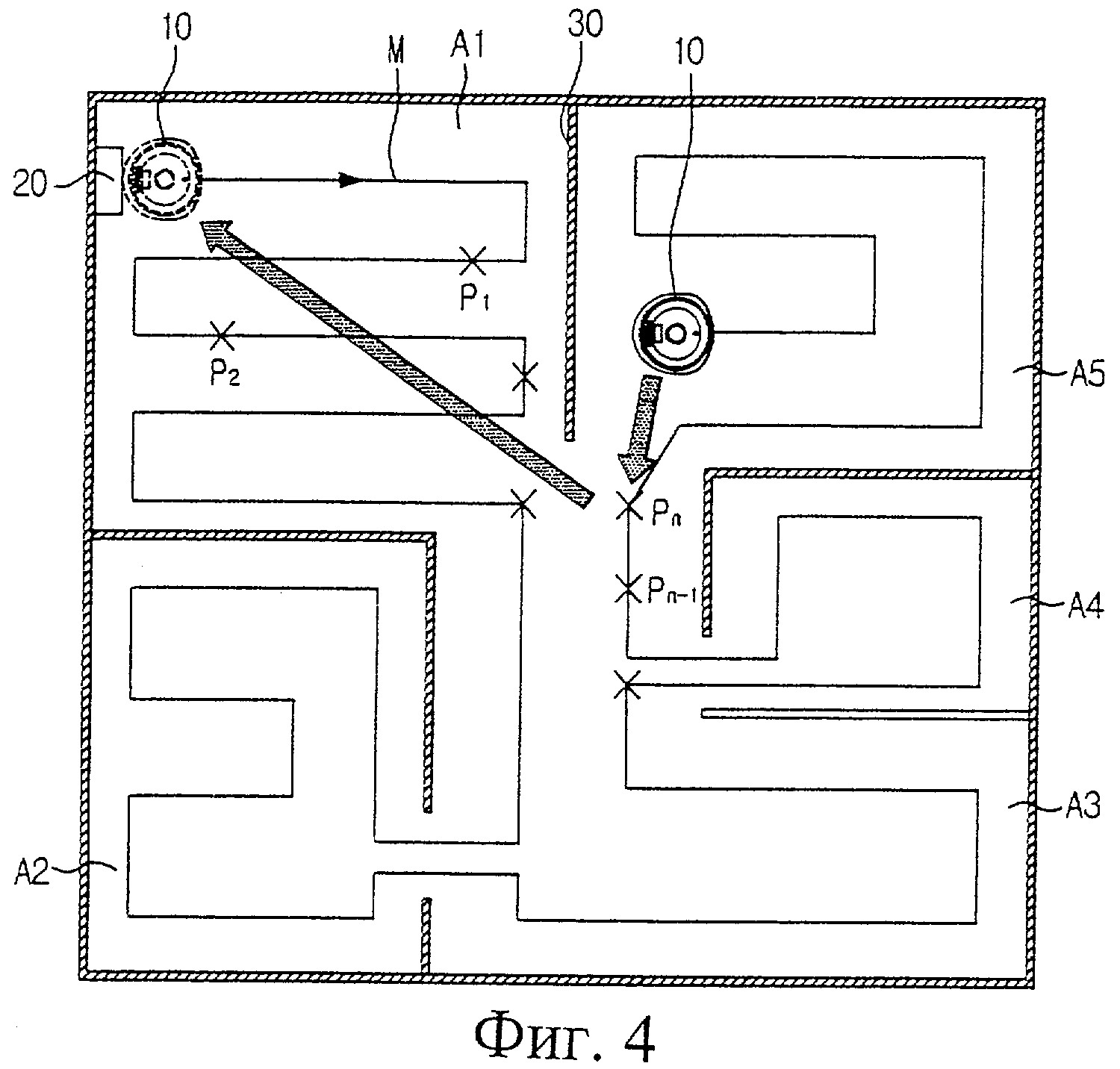
фиг.4 представляет собой схематическую иллюстрацию работы робота-пылесоса в соответствии с другим неограничивающим вариантом выполнения данного изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ВЫПОЛНЕНИЯ
Ниже приведено болей подробное описание неограничивающих вариантов выполнения данного изобретения со ссылкой на прилагаемые чертежи. На данных чертежах одинаковые элементы обозначены одинаковыми номерами позиций для всех чертежей. Кроме того, описание известных функций или конструкций не приведено подробно, поскольку оно мешало бы пониманию изобретения.
В качестве пояснения, робот-пылесос 10, содержащий датчик 16 расстояния или блок формирования изображения, может не только измерять расстояние до препятствий на очищаемой поверхности, включая стены, но также может обнаруживать препятствия с целью устранения любых возможных столкновений или задержки во время уборки.
Робот-пылесос 10 может содержать левое приводное колесо, правое приводное колесо и торцевое приводное колесо, каждое из которых подсоединено к приводному двигателю на нижней части пылесоса. Управление приводным двигателем может осуществляться контроллером 30 с возможностью изменения направления движения пылесоса, а также скорости приведения в движение.
В нижней части пылесоса может быть выполнен всасывающий канал, способный втягивать пыль или другие загрязнения. Всасывающее усилие всасывающего канала может создаваться двигателем 19, выполненным отдельно на пылесосе. Всасывающий канал может быть подсоединен к отдельной пылеулавливающей камере в пылесосе для возможности сбора пыли или загрязнений из втягиваемого воздуха.
Пылесос совершает движение по определяемым схемам перемещения на поверхности или по заданному маршруту перемещения для уборки очищаемой зоне. По существу, во время перемещения робота-пылесоса по очищаемой поверхности с выполнением уборки контроллер проверяет емкость аккумулятора для определения дефицита энергии аккумулятора. При условии определения контроллером необходимости подзарядки аккумулятора робот-пылесос может обнаружить местонахождение внешнего зарядного устройства и перемещаться к нему за счет установки связи с внешним зарядным устройством. Другими словами, робот-пылесос 10 может обмениваться сигналами с зарядным устройством для обнаружения его местоположения, а контроллер приводит в действие приводной двигатель для перемещения пылесоса к внешнему зарядному устройству 20. Соединительная клемма на роботе-пылесосе 10 может быть подсоединена к клемме подзарядки на внешнем зарядном устройстве. При соединении друг с другом клеммы подзарядки и соединительной клеммы контроллер осуществляет подзарядку (в режиме подзарядки) до полной зарядки аккумулятора. Во время подзарядки другие операции робота-пылесоса 10 могут быть приостановлены. Например, возможно отключение режима приведения в движение и/или режима уборки во время проведения подзарядки.
Далее рассматривается робот-пылесос 10 в соответствии с неограничивающим аспектом данного изобретения со ссылкой на фиг.1 и 2. Снаружи на роботе-пылесосе 10 может находиться в открытом состоянии клемма подзарядки. Местоположение и высота данной клеммы подзарядки выполнены с возможностью соответствия клемме 29 подзарядки отдельно выполненного внешнего зарядного устройства 20.
Робот-пылесос 10 может содержать запоминающее устройство 12, аккумулятор 13, детектор 14 энергии аккумулятора, датчик 15 обнаружения поверхности, передний датчик 16 обнаружения, передатчик/приемник 17, составную часть 18, приводящую в движение левое и правое колесо, и контроллер 30.
Устройство 12 может запоминать некоторое количество информации, например, время уборки, зону уборки и/или схему уборки, а также другую информацию. Эта информация предназначена для контроллера 30, чтобы автоматически управлять роботом-пылесосом. Кроме того, возможно запоминание необходимой дополнительной информации по мере ее создания или получения во время уборки.
Аккумулятор 13 осуществляет снабжение энергией для приведения в движение и обеспечивает некоторый запас энергии. Если потребление энергии аккумулятора ниже заранее заданного уровня, то робот-пылесос 10 может вернуться к устройству 20 для подзарядки аккумулятора 13.
Детектор 14 может осуществлять частую проверку уровня имеющейся в аккумуляторе 13 энергии, а также посылать сигнал запроса на подзарядку аккумулятора контроллеру 30 при условии падения уровня имеющейся энергии аккумулятора ниже заранее заданного уровня.
Датчик 15 может быть расположен в нижней части робота-пылесоса 10, при этом он может быть обращен к очищаемой поверхности. Датчик 15 способен измерять расстояние от очищаемой поверхности. Кроме того, датчик 15 может обнаруживать метки, подготовленные по заданной схеме на очищаемой поверхности. Другими словами, датчик 15 может определять карту передвижения. Следовательно, датчик 15 может быть использован для подтверждения очищаемой площади и/или маршрута передвижения. Датчик обнаружения поверхности может быть либо светочувствительным принимающим/передающим датчиком, или фотодатчиком в качестве неограничивающих примеров.
Передний датчик 16 может быть выполнен на стороне робота-пылесоса 10, предпочтительно спереди, где расположена соединительная клемма 11. Передний датчик 16 используется для обнаружения любого возможного препятствия (включая стены), находящегося перед роботом-пылесосом или в направлении его перемещения. Передний датчик 16 дополнительно может быть выполнен для возможности измерения расстояния до препятствия. Передний датчик 16 может быть светочувствительным принимающим/передающим датчиком в качестве неограничивающего примера. При приближении к устройству 20 для работы в режиме подзарядки робот-пылесос 10 может обнаруживать заранее заданные опознавательные метки у устройства 20, а также измерять расстояние между опознавательными метками и роботом-пылесосом 10.
Передатчик/приемник 17 может обмениваться сигналами с внешним передатчиком/приемником 29 внешнего зарядного устройства посредством беспроводной связи. Во время работы робота-пылесоса 10 под управлением контроллера 30 передатчик/приемник 17 может пытаться установить связь с устройством 20, например, через заранее заданный интервал времени и/или через заранее заданный пройденный путь. Соответственно, передатчик/приемник 17 может определять местонахождение внешнего зарядного устройства посредством связи с внешним передатчиком/приемником 29, выполненным на внешнем зарядном устройстве для определения его местонахождения. Кроме того, передатчик/приемник 17 может передавать сигналы к контроллеру с дистанционным управлением, приводимому в действие пользователем, или отдельному центральному контроллеру с дистанционным управлением и/или принимать сигналы от них. Другими словами, управление роботом-пылесосом 10 может осуществляться дистанционно. Сигналы, определенные каждым датчиком 15, 16, могут быть переданы к контроллеру 30, который, соответственно, осуществляет управление роботом-пылесосом 10.
Всасывающее усилие для уборки очищаемой поверхности создается элементом 19, при этом создающий всасывающее усилие элемент 19 может содержать двигатель, создающий всасывание, и отделяющий пыль фильтр. Пылеулавливающий фильтр в качестве неограничивающих примеров может быть обычным мешком для пыли или циклонным пылеулавливающим блоком.
Часть 18 приводит в движение левое и правое колеса, выполненные в нижней части робота-пылесоса 10. Управление частью 18, приводящей в движение левое и правое колеса, может осуществляться контроллером 30. Часть 18, например, может содержать шаговый двигатель, подсоединенный к каждому колесу.
Контроллер 30 осуществляет управление операцией приведения в действие и перемещениями робота-пылесоса 10. В частности, в соответствии с неограничивающим вариантом выполнения данного изобретения, во время перемещения по очищаемой поверхности контроллер 30 может создавать карту перемещений, исходя из управляющего сигнала приведения в действие части 18. Карта перемещений может быть создана, исходя из пройденного расстояния и направления, при этом данная карта сохраняется в запоминающем устройстве 12. Контроллер 30 может управлять передатчиком/приемником 17 для осуществления попытки периодической связи с внешним зарядным устройством 20, а также может распознавать точки установки связи между передатчиком/приемником 17 и внешним зарядным устройством 20. При распознавании места установки связи контроллер 30 может отмечать данные места на карте перемещения, сохраненной в запоминающем устройстве 12.
Если схема перемещений помечена на очищаемой поверхности, то контроллер 30 может выявить схему перемещений, используя датчик 15 обнаружения поверхности, а также сохранять выявленную схему в запоминающем устройстве 12. Контроллер 30 может обнаруживать и отмечать все места установки связи так, что данные места могут быть отмечены на схеме перемещения, сохраненной в устройстве 12. При поступлении сигнала запроса подзарядки аккумулятора, как это описано выше, контроллер 30 может осуществлять управление частью 18 для определения местонахождения устройства 20, используя сохраненную в устройстве 12 информацию.
Фиг.3 и 4 иллюстрируют неограничивающий способ управления роботом-пылесосом в соответствии с другим неограничивающим вариантом выполнения данного изобретения. В нижеприведенном описании исходным размещением робота-пылесоса 10 является состояние его подсоединения к внешнему зарядному устройству 20 в режиме ожидания.
Прежде всего, контроллер 30 определяет условие ввода рабочей команды снаружи (S10). При определении ввода команды осуществляется запрашиваемая операция (S11). То есть, при приеме команды уборки робот-пылесос 10 может быть отсоединен от устройства 20. Затем контроллер 30 может управлять элементом 19, приводящим в действие всасывание, и частью 18 для приведения в движение и уборки очищаемых зон (А1-А5) в заранее заданном порядке.
При перемещении робота-пылесоса 10 для уборки очищаемых зон (А1-А5) контроллер может создавать карту (М) перемещения, исходя из по меньшей мере одного из параметров - расстояния перемещения и/или направления перемещения, и может сохранять ее в устройстве 12 (S12). При. каждом перемещении робота-пылесоса 10 по очищаемой зоне (А1-А5) карта (М) перемещения может продолжать непрерывно обновляться и сохраняться.
Из вышеизложенного следует, что при перемещении робота-пылесоса 10 в процессе уборки контроллер 30 может управлять передатчиком/приемником 17 для попытки установить связь с устройством 20 через заданное расстояние перемещения и/или через заданный интервал времени.
Контроллер 30 определяет, насколько успешна установка связи (S14). В случае неудачи в установке связи контроллер 30 может управлять роботом-пылесосом для продолжения попытки установить связь с внешним зарядным устройством 30.
С другой стороны, при определении, что связь с приемником/передатчиком 17 прошла успешно, контроллер 30 может запомнить точку Р1 установки связи на карте (S15) перемещения. Как показано выше, при выполнении регулярной установки связи с устройством 20 во время перемещения робота-пылесоса 10 распознаваемые каждый раз (Р1-Pn) точки установки связи могут быть отмечены на карте (М) перемещения с сохранением в устройстве 12 контроллера 30. Затем контроллер 30 может определить, завершена ли работа (S16) или нет.
Если установлено, что операция не завершена (S16), то контроллер 30 может определить, следует подзаряжать (S17) аккумулятор или нет. Следовательно, на этапе S17 детектор 14 энергии аккумулятора может осуществлять частую проверку наличия энергии аккумулятора 13 и передавать результат проверки контроллеру 30. Если установлено, что необходимо подзарядить (S17) аккумулятор, то робот-пылесос 10 может быть вынужден прекратить операцию, чтобы определить при этом местонахождение внешнего зарядного устройства 20 и возвратиться к нему.
В другом неограничивающем примере робот-пылесос 10 может быть расположен в пределах очищаемой зоны (А5). В этом случае робот-пылесос 10 может быть не способен непосредственно установить связь с устройством 20. В результате контроллер 30 может управлять частью 18 для определения места и перемещения к одной из точек (Р1-Pn) установки связи, отмеченных на карте (М) перемещения, сохраненной в устройстве 12 (S18). На данном этапе, в предпочтительном случае, робот-пылесос определяет местонахождение и перемещается к ближайшей точке (Pn) установки связи, в которой работа прекращается.
Как описано выше, при перемещении пылесоса 10 к точке (Pn) установки связи он может установить связь с устройством 20. Соответственно, после перемещения к точке (Pn) установки связи робот-пылесос 10 может установить связь с устройством 20 и перемещаться для соединения с ним (S19).
Как описано выше, робот-пылесос 10 может начинать движение от точки (Pn) установки связи и таким образом по возможности быстро перемещаться для подсоединения к устройству 20. Следовательно, имеется возможность предотвратить остановку робота-пылесоса 10 вследствие истощения энергии аккумулятора во время возвращения к устройству 20.
Как может быть оценено из вышеописанного, при предлагаемых роботе-пылесосе 10 и способе управления им, в соответствии с неограничивающими вариантами выполнения данного изобретения, гарантировано положение, в котором робот-пылесос 10 может устанавливать связь с устройством 20, с тем, чтобы робот-пылесос мог вернуться к месту подзарядки.
Следовательно, после перемещения к положению, в котором возможно установить связь с устройством 20, робот-пылесос 10 может быстро перемещаться к внешнему зарядному устройству посредством связи. В результате работа робота-пылесоса осуществляется равномерно с предотвращением тем самым остановки из-за истощения энергии аккумулятора.
Хотя изобретение продемонстрировано и описано со ссылкой лишь на некоторые варианты его выполнения, специалистам в данной области техники понятно, что возможно внесение различных изменений в форму и детали, не выходящих за пределы сущности и объема изобретения, определенные в прилагаемой формуле изобретения.
Реферат
Изобретение относится к области управляющих устройств и предназначено для управления роботом-пылесосом. Технический результат заключается в повышении надежности за счет обеспечения своевременной подзарядки аккумулятора робота-пылесоса. Робот-пылесос содержит движущее средство, предназначенное для приведения в движение колес, передатчик/приемник, предназначенный для установки связи с внешним зарядным устройством, и контроллер для управления приводным блоком. Указанный контроллер управляет передатчиком/приемником с обеспечением установки связи с внешним зарядным устройством во время перемещения по очищаемой зоне и сохраняет в запоминающем устройстве по меньшей мере одно место установки связи. Данный контроллер дополнительно управляет приводным блоком с обеспечением перемещения робота-пылесоса к внешнему зарядному устройству с использованием по меньшей мере одного места установки связи. 3 н. и 15 з.п. ф-лы, 4 ил.

Формула
Документы, цитированные в отчёте о поиске
Система робота-пылесоса, имеющая внешнее зарядное устройство, и способ стыковки с зарядным устройством
Комментарии