Сельскохозяйственная пашущая система, способ её работы и машиночитаемый носитель, содержащий компьютерную программу, выполненную с возможностью осуществления указанного способа - RU2742473C1
Код документа: RU2742473C1
Чертежи




Описание
УРОВЕНЬ ТЕХНИКИ
Настоящее изобретение относится к сельскохозяйственному плугу, в частности, но не ограничиваясь, к плугу, содержащему пашущее орудие. Другие аспекты настоящего изобретения относятся к способу работы сельскохозяйственного плуга.
В сельском хозяйстве соблюдаются фермерские циклы, которые можно условно разделить на различные этапы подготовки земли, посева семян, внесения удобрений, орошения, выращивания сельскохозяйственных культур и сбора урожая. Каждый из этих этапов имеет решающее значение для получения оптимальных результатов урожая и достижения требуемой отдачи от первоначальных инвестиций. Из перечисленных этапов, подготовка почвы обычно дополнительно делится на этапы, при необходимости, очистки препятствий (например, кустарников, камней и булыжников) и последующей обработки почвы.
Обработка почвы крошит и разрыхляет почву, улучшает структуру почвы и вносит растительные остатки и навоз в почву, таким образом, удобряя землю. Улучшенная структура почвы позволяет увеличить рост корней растений, аэрацию почвы и проникновение/фильтрацию воды. В целом, это приводит к повышению урожайности, улучшению долгосрочного плодородия почвы, удержанию влаги в почве и борьбе с сорняками. Обработка почвы может быть разделена на первичную (относительно глубокую) и вторичную (относительно мелкую) обработку почвы. При первичной обработке почвы, такой как вспашка, почва переворачивается так, что питательные вещества выходят на поверхность. В дополнение к обработке почвы для доставки свежих питательных веществ на верхнюю часть и отложению остатков растений ниже, где они будут разрушаться, этот процесс также проветривает землю, позволяя ей удерживать больше влаги. Подготовка почвы на большую глубину приводит к более грубой обработке поверхности, чем вторичная обработка почвы. Вторичная обработка почвы (например, возделывание семян) разбивает комки почвы на меньшие массы, что может быть желательно для небольших семян или растений, которые имеют минимальную способность к переработке комков.
Первичная обработка почвы, и особенно вспашка, широко рассматривается как один из наиболее эффективных способов предотвращения болезней сельскохозяйственных культур, удаления сорняков и борьбы с мышами и другими вредителями. В своей простейшей форме переворотный плуг, также известный как отвальный плуг, включает в себя различные плужные корпуса, которые являются лезвиями для проникновения и переворачивания почвы в рядах соседних канавок, известных как борозды. Современные плуги обычно включают в себя множество плужных корпусов, соединенных с рамой плуга таким образом, что они смещены в боковом направлении друг от друга, когда плуг используется. Каждый плужный корпус соединен с рамой плуга посредством соответствующих балок. Рама плуга, в свою очередь, соединена с буксирующим или толкающим транспортным средством через сцепное устройство, расположенное на переднем или заднем конце рамы.
В зависимости от плотности почвы, рабочая глубина плужных корпусов может быть отрегулирована. Например, рабочая глубина плужных корпусов может быть небольшой в более твердых (плотных) почвах, тогда как более глубокая рабочая глубина может применяться в более мягких (менее плотных) почвах. Плужные корпуса могут быть жестко прикреплены к основной раме, так что их расстояние от основной рамы остается постоянным. Соответственно, рабочая глубина плугов затем регулируется путем изменения расстояния от поверхности земли основной рамы. Если основная рама приближается к поверхности земли, расстояние от поверхности земли, и плужные корпуса проникают глубже в почву. Аналогичным образом, если основная рама поднимается дополнительно от земли, расстояние от поверхности земли увеличивается, и плужные корпуса поднимаются, тем самым, уменьшая рабочую глубину.
Расстояние от поверхности земли основной рамы может, например, регулироваться одним или несколькими опорными колесами. Одно или более опорных колес могут быть связаны с любой частью основной рамы, такой как задний конец основной рамы. Регулируемое соединение между основной рамой и опорным колесом может быть предусмотрено для обеспечения возможности изменения расстояния между опорным колесом и основной рамой. Во время вспашки, опорное колесо движется по поверхности земли и выдерживает вес плуга. Если расстояние между опорным колесом и основной рамой уменьшается, то соответственно уменьшается расстояние от поверхности земли между основной рамой и поверхностью земли. С другой стороны, если расстояние между опорным колесом и основной рамой увеличивается, расстояние от поверхности земли основной рамы увеличивается. Как обозначено выше, изменение расстояния от поверхности земли основной рамы приводит к изменению глубины вспашки.
Другим фактором правильной установки сельскохозяйственных плугов является поперечная регулировка плужных корпусов пашущего орудия (см. например, патент РФ 2 633 559, 09.09.2013) относительно рабочего транспортного средства, то есть в направлении, перпендикулярном направлению движения. Одним из способов поперечной регулировки плужных корпусов является смещение основной рамы пашущего орудия относительно сцепки. Это может быть использовано для регулировки поперечного положения первого плужного корпуса пашущего орудия для создания равномерно выровненных борозд.
Поперечная регулировка пашущего орудия и, следовательно, плужных корпусов может также использоваться для изменения ширины вспашки плужных корпусов и получаемой ширины борозды. С этой целью, основная рама пашущего орудия может быть повернута относительно сцепки в горизонтальной плоскости (если поверхность земли является горизонтальной), для изменения угла основной рамы относительно сельскохозяйственного рабочего транспортного средства. При повороте основной рамы, плужные корпуса перемещаются одновременно в поперечном и продольном направлении относительно сельскохозяйственного транспортного средства. Поворот основной рамы в отношении рабочего транспортного средства изменит поперечное продолжение пашущего орудия (например, плужных корпусов). Поперечная регулировка путем поворота, таким образом, влияет на ширину вспашки пашущего орудия. Отсюда следует, что регулировка поворота может влиять на потребление энергии и/или может влиять на износ плуга.
Таким образом, регулировка поперечного расположения пашущего орудия относительно сельскохозяйственной рабочей машины является важной и наиболее сложной задачей при настройке пашущего орудия для операции вспашки.
Ввиду вышесказанного, как правило, существует потребность в улучшенном способе установки правильного поперечного положения пашущего орудия относительно рабочего транспортного средства.
Целью настоящего изобретения является решение или по меньшей мере улучшение одной или нескольких проблем предшествующего уровня техники.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Аспекты и варианты осуществления изобретения обеспечивают способ регулировки рабочей глубины пашущего орудия, и пашущее орудие как заявлено в прилагаемой формуле изобретения.
Согласно первому аспекту настоящего изобретения, предложена сельскохозяйственная пашущая система, содержащая:
- сельскохозяйственное транспортное средство, пашущее орудие, соединенное с сельскохозяйственным транспортным средством и содержащее по меньшей мере один взаимодействующий с землей инструмент по меньшей мере один привод, который выполнен с возможностью перемещения по меньшей мере одного взаимодействующего с землей инструмента в поперечном направлении относительно сельскохозяйственного рабочего транспортного средства, и блок управления.
Блок управления выполнен с возможностью приема данных о поле, указывающих условия поля, по которому перемещается сельскохозяйственная пашущая система, и автоматически определения сигнала управления приводом для приводного механизма на основе данных о поле, причем сигнал управления приводом предназначен для перемещения по меньшей мере одного взаимодействующего с землей инструмента в поперечном направлении относительно сельскохозяйственного рабочего транспортного средства на основе принятых данных о поле.
В другом варианте осуществления сельскохозяйственной пашущей системы, блок управления выполнен с возможностью автоматического обеспечения данных о поле по меньшей мере одному приводному механизму для пашущего орудия в поперечном направлении относительно сельскохозяйственного рабочего транспортного средства.
Данные о поле могут содержать одно или более из:
данных контура земли, связанных с текущими или предыдущими контурами земли поля, по которому перемещается пашущее орудие;
данных о препятствиях, связанных с текущими или предыдущими местоположениями препятствий в поле, через которое перемещается пашущее орудие; и
данных о плотности почвы, связанных с текущими или предыдущими плотностями почвы, по которому перемещается пашущее орудие.
Данные контура земли могут содержать данные поперечного контура, которые представляют поперечные контуры поля, по которому перемещается пашущее орудие.
Данные поперечного контура могут содержать усредненные данные контура, которые усредняются по ширине пашущего орудия.
Множество подходящих данных о поле могут храниться в базе данных, и при этом автоматическое определение сигнала управления приводом может включать в себя:
прием данных о местоположении пашущего орудия в поле; и
использование данных местоположения для выбора одного из подходящих данных о поле в качестве данных о поле.
Блок управления может быть выполнен с возможностью извлечения и/или вычисления требуемого поперечного расположения пашущего орудия относительно сельскохозяйственного транспортного средства на основе данных о поле.
В другом варианте осуществления, блок управления выполнен с возможностью определения текущего поперечного расположения пашущего орудия относительно сельскохозяйственного транспортного средства и сравнения текущего поперечного расположения с требуемым поперечным расположением, причем блок управления выполнен с возможностью установки сигнала управления приводом, чтобы вызвать поперечное регулирование пашущего орудия относительно сельскохозяйственного рабочего транспортного средства, если разность между текущим и требуемым поперечным расположением превышает или снижается ниже заданного порогового значения.
Блок управления может быть выполнен с возможностью установки сигнала управления приводом таким образом, чтобы пашущее орудие перемещалось вверх по склону относительно сельскохозяйственного рабочего транспортного средства, если сельскохозяйственная пашущая система перемещается через склон.
Блок управления может быть выполнен с возможностью установки сигнала управления приводом таким образом, чтобы пашущее орудие перемещалось в поперечном направлении от препятствия, к которому приближается сельскохозяйственная пашущая система.
Согласно другому варианту осуществления, приводной механизм включает в себя одно или более из:
механизма поперечного скольжения, который выполнен с возможностью поперечного смещения пашущего орудия относительно сельскохозяйственного рабочего транспортного средства; и
механизма регулировки ширины плуга, который выполнен с возможностью поворота в горизонтальной плоскости основной рамы пашущего орудия.
Механизм поперечного скольжения может приводиться в движение гидравлическим цилиндром. Альтернативно, механизм поперечного скольжения может приводиться в движение роторным двигателем с рейкой и зубчатой передачей, стальными тросами или устройством ходового винта. При использовании роторного двигателя, рейка и зубчатое колесо, стальные тросы или устройство ходового винта могут быть соединены с телескопическим корпусом, таким как телескопический цилиндр или квадратная труба для перемещения механизма скольжения. Аналогичным образом, механизм регулировки ширины плуга может приводиться в действие либо гидравлическим цилиндром, либо роторным двигателем.
По меньшей мере один приводной механизм может быть выполнен с возможностью перемещения основной рамы пашущего орудия в поперечном направлении относительно сельскохозяйственного рабочего транспортного средства.
Согласно другому аспекту настоящего изобретения, предложен реализуемый на компьютере способ управления сельскохозяйственной пашущей системой, причем сельскохозяйственная пашущая система содержит:
сельскохозяйственное рабочее транспортное средство;
пашущее орудие, соединенное с сельскохозяйственным рабочим транспортным средством и содержащее по меньшей мере один взаимодействующий с землей инструмент; и
по меньшей мере один приводной механизм, который выполнен с возможностью перемещения пашущего орудия в поперечном направлении относительно сельскохозяйственного рабочего транспортного средства, при этом способ включает этапы, при которых:
принимают данные о поле, указывающие условия поля, по которому перемещается сельскохозяйственная пашущая система;
автоматически определяют сигнала управления приводом для приводного механизма на основе данных о поле, причем сигнал управления приводом предназначен для перемещения пашущего орудия в поперечном направлении относительно сельскохозяйственного рабочего транспортного средства на основе принятых данных о поле.
Сигнал управления приводом может быть предназначен для перемещения пашущего орудия в поперечном направлении относительно сельскохозяйственного рабочего транспортного средства, так, чтобы пашущее орудие перемещалось вверх по склону, относительно сельскохозяйственного транспортного средства, если сельскохозяйственная пашущая система перемещается по склону.
В еще одном аспекте настоящего изобретения предложена компьютерная программа, выполненная с возможностью осуществления вышеупомянутого способа или конфигурирования вышеупомянутого блока управления. При запуске на компьютере, компьютерная программа заставляет компьютер конфигурировать любое устройство, включая блок управления, раскрытый в данном документе, или выполнять любой способ, раскрытый в данном документе. Компьютерная программа может быть программной реализацией, и компьютер может рассматриваться как любое подходящее аппаратное обеспечение, включая процессор цифровых сигналов, микроконтроллер и реализацию в постоянном запоминающем устройстве (ПЗУ), стираемом программируемом постоянном запоминающем устройстве (СППЗУ) или в электронно-стираемом программируемом постоянном запоминающем устройство (ЭСППЗУ) в качестве не ограничивающих примеров. Программное обеспечение может быть программой сборки.
Компьютерная программа может быть предоставлена на машиночитаемом носителе, который может быть физическим машиночитаемым носителем, таким как диск или устройство памяти, или может быть воплощен как кратковременный сигнал. Такой кратковременный сигнал может быть загружен по сети, включая загрузку через Интернет.
Сельскохозяйственное рабочее транспортное средство и/или сельскохозяйственное орудие могут управляться дистанционно, например, из офиса фермы. Соответственно, сельскохозяйственное рабочее транспортное средство может включать в себя один или более интерфейсов связи для соединения к удаленному процессору и/или пульту дистанционного управления. Аналогичным образом, сельскохозяйственное орудие может включать в себя один или более интерфейсов связи для соединения к удаленному процессору и/или пульту дистанционного управления.
В пределах объема настоящего изобретения, явно предполагается, что могут быть приняты различные аспекты, варианты осуществления, примеры и альтернативы, изложенные в предыдущих абзацах, а также формула изобретения и/или последующее описание и чертежи, и, в частности, их отдельные признаки самостоятельно или в любой комбинации. То есть все варианты осуществления и все признаки любого варианта осуществления могут комбинироваться любым способом и/или комбинацией, если только такие признаки не являются несовместимыми. Заявитель оставляет за собой право изменить любую первоначально поданную заявку или подать любую новую заявку соответствующим образом, включая право вносить изменения в любую первоначально поданную заявку, чтобы она зависела от и/или учитывала любую особенность любой другой заявки, хотя она первоначально не была заявлена таким образом.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Один или более вариантов осуществления настоящего изобретения теперь будут описаны, только в качестве примера, со ссылкой к прилагаемым чертежам, на которых:
Фиг. 1А показывает правосторонний вид сельскохозяйственного орудия с фиксированными взаимодействующими с землей инструментами;
Фиг. 1В показывает левосторонний вид сельскохозяйственного орудия, показанного на фиг. 1А;
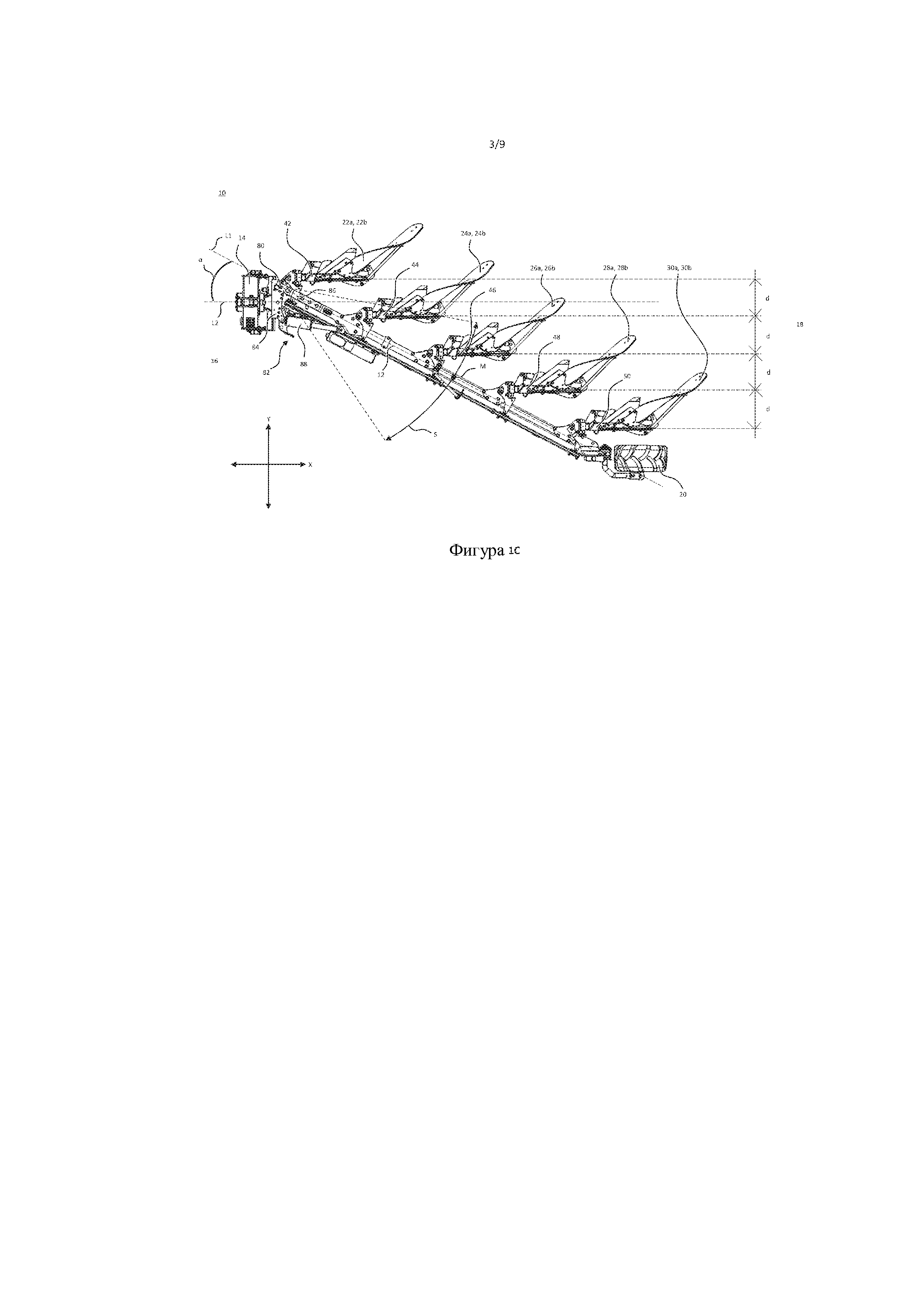
Фиг. 1С показывает вид в плане сельскохозяйственного орудия, показанного фиг. 1А;
Фиг. 2 показывает схематичное представление траектория движения сельскохозяйственной машины в рабочей зоне;
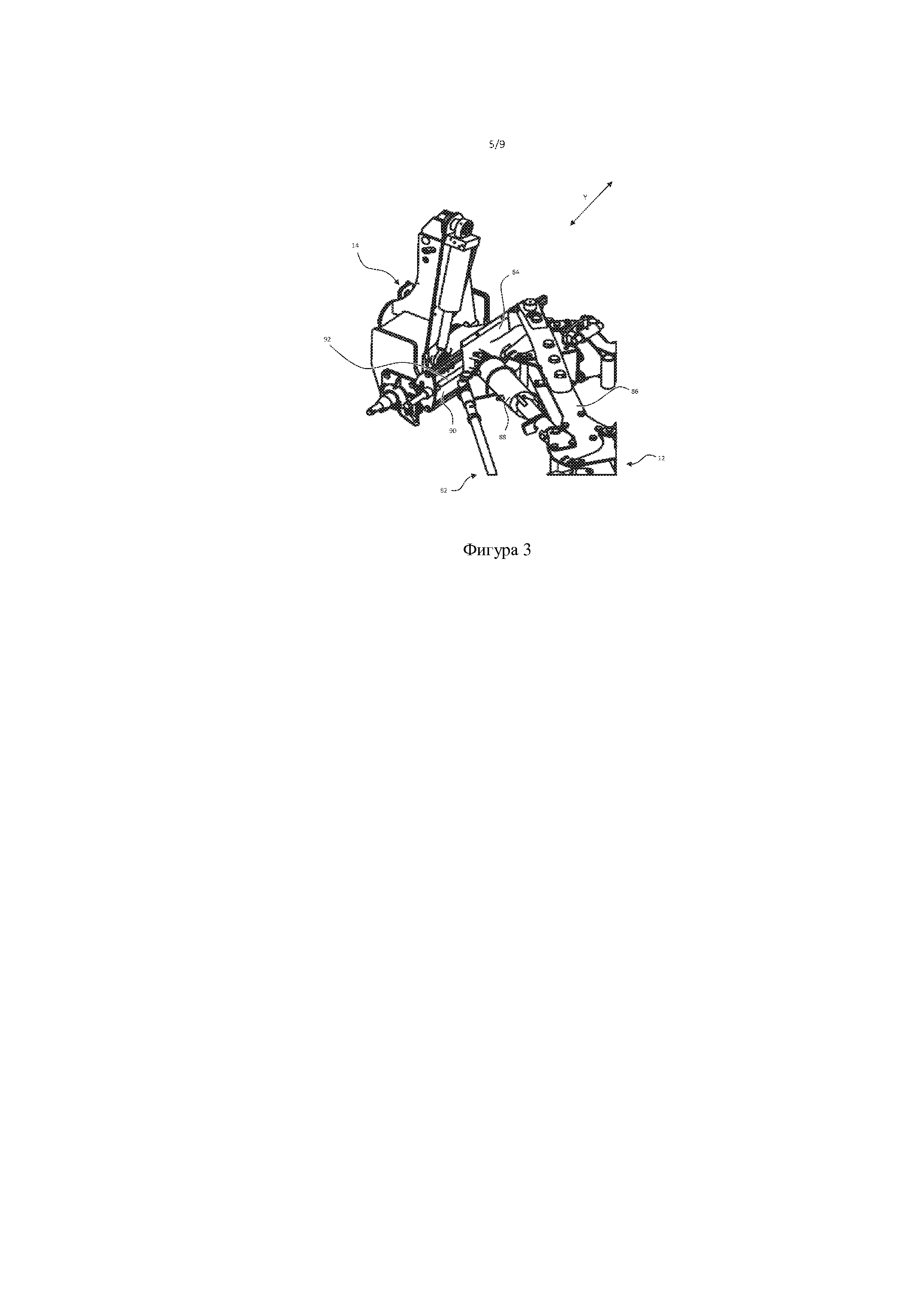
Фиг. 3 показывает схематичное представление область сцепки сельскохозяйственного пашущего орудия;
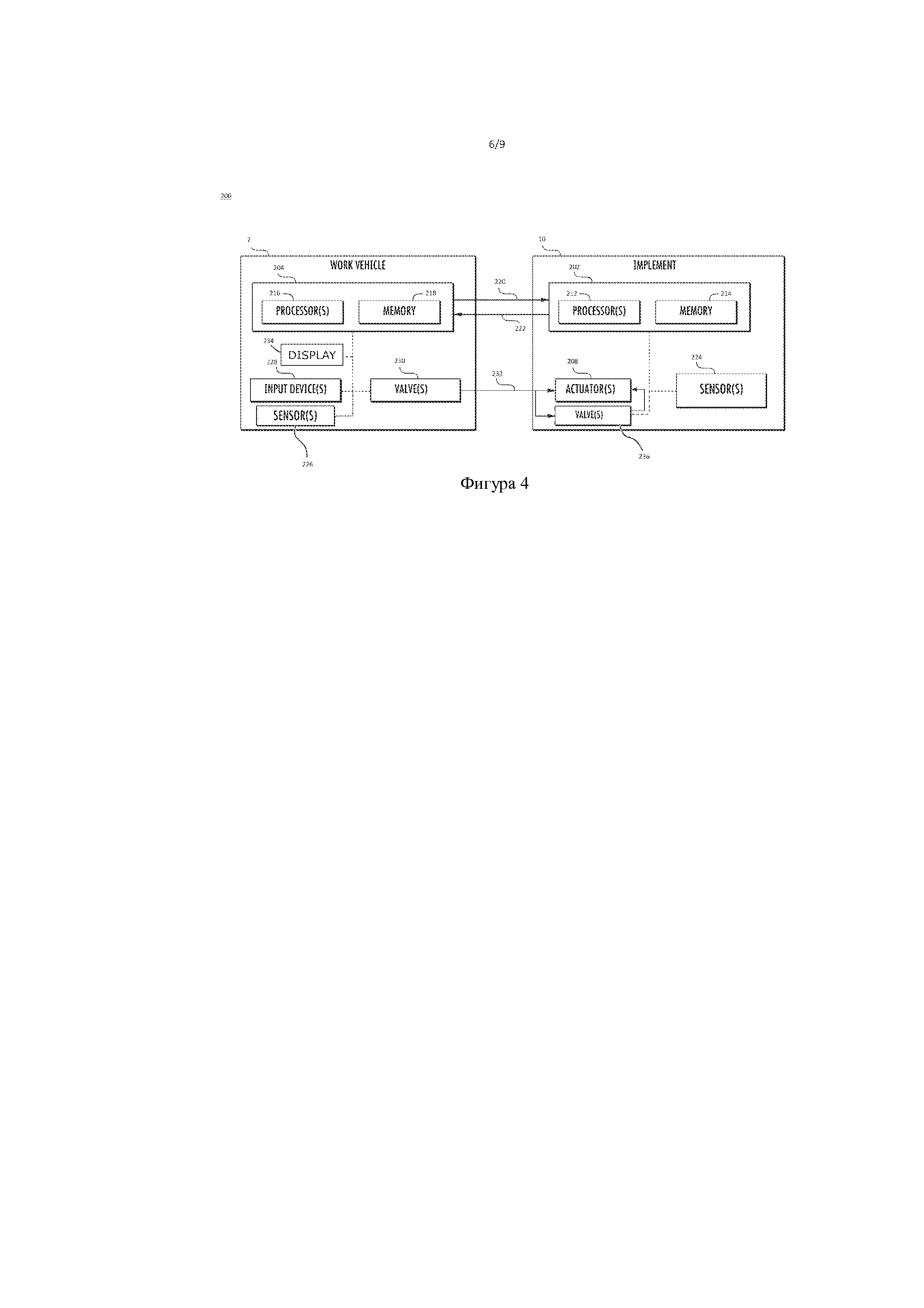
Фиг. 4 показывает схематичное представление системы для регулировки поперечного положения пашущего орудия относительно сельскохозяйственного рабочего транспортного средства;
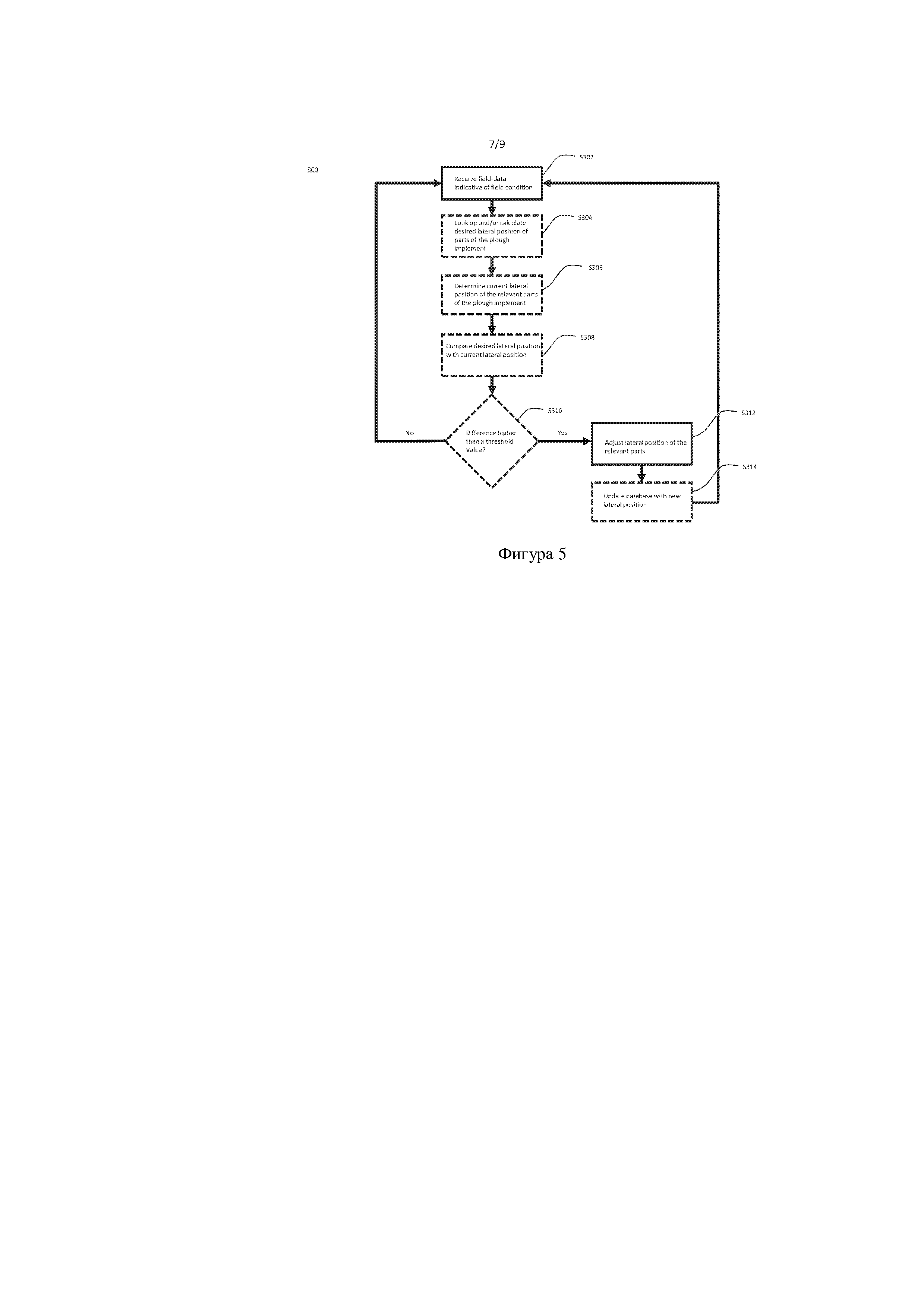
Фиг. 5 показывает блок-схему способа регулировки поперечного положения сельскохозяйственного пашущего орудия согласно варианту осуществления настоящего изобретения;
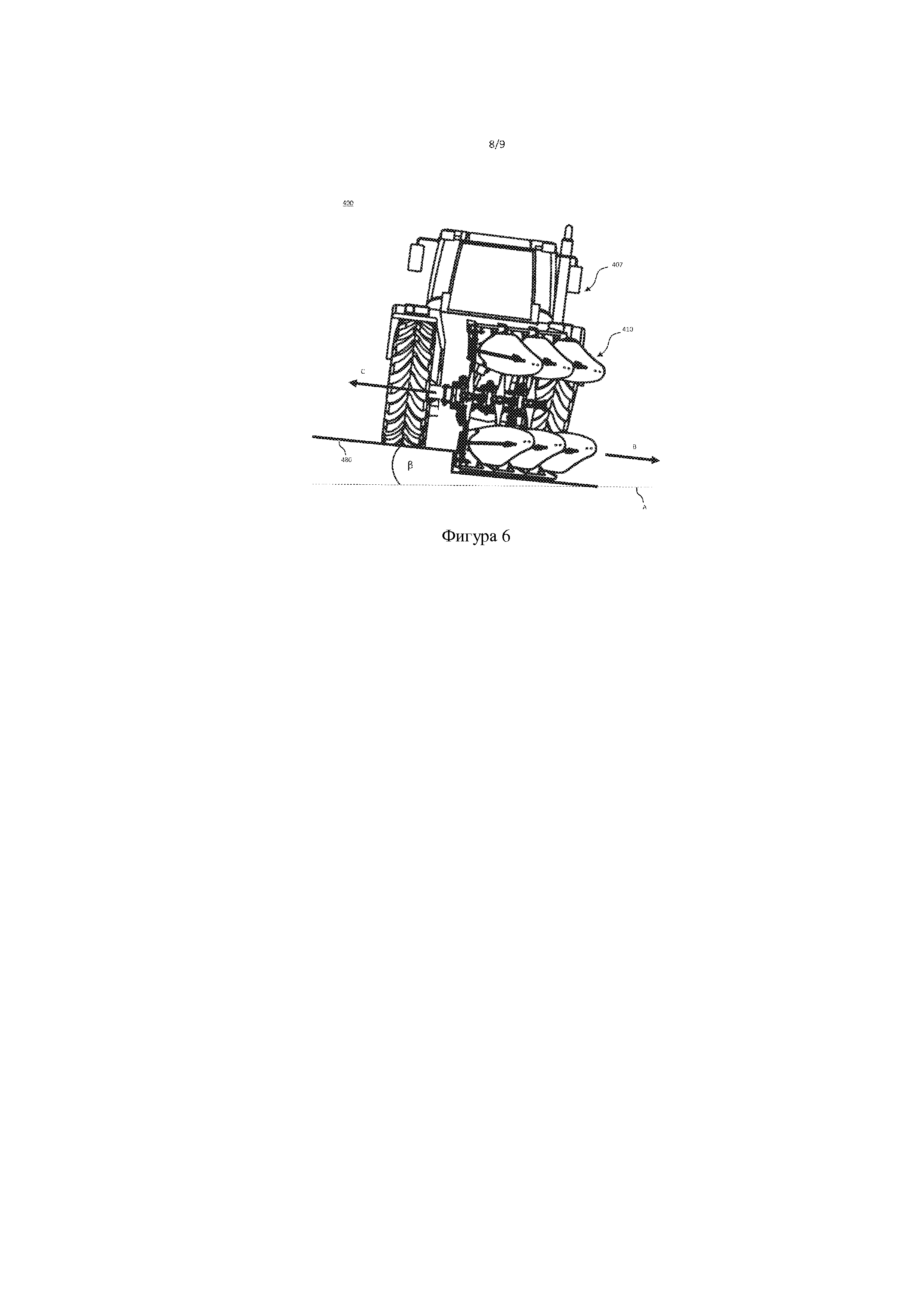
Фиг. 6 показывает сельскохозяйственную пашущую систему, движущуюся по поперечному склону; и
Фиг. 7 показывает сельскохозяйственную пашущую систему, движущуюся по продольному склону.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Фигуры 1А-1С показывают различные виды
сельскохозяйственного орудия, в частности, пашущего орудия 10. Как будет описано более подробно ниже, пашущее орудие 10, показанное на фигурах 1А-1С, является оборотным плугом.
Далее термин «продольное направление» относится к направлению X, показанному на фигурах 1А-1С. В нормальных условиях «продольное направление» совпадает с направлением движения сельскохозяйственного пашущего орудия 10. Термин «поперечное направление» относится к направлению Y, показанному на фигурах 1С и 3. Поперечной направление Y является перпендикулярным «продольному направлению» X. Термин «вертикальное направление» относится к направлению Z, показанному на фигурах 1А и 1В. «Вертикальное направление» Z является перпендикулярным «продольному направлению» X и «поперечному направлению» Y.
Пашущее орудие 10 содержит основную раму 12. Основная рама 12 может представлять собой прямоугольную или круглую трубу, продолжающуюся между сцепкой 14 на переднем конце 16 плуга по направлению к колесу 20 плуга на заднем конце 18 плуга. Основная рама 12 поддерживает множество взаимодействующих с землей инструментов.
В примере на фигурах 1А-1С взаимодействующие с землей инструменты включают в себя плужные корпуса 22а, 22b, 24а, 24b, 26а, 26b, 28а, 28а, 28b, 30а, 30b и предплужники 32а, 32b, 34а, 34b, 36а, 36b, 38а, 38б, 40а, 40b плуга. Множество первых взаимодействующих с землей инструментов, то есть плужные корпуса 22а, 24а, 26а, 28а, 30а и предплужники 32а, 34а, 36а, 38а и 40а плуга, расположены на первой стороне основной рамы 12. В первой конфигурации основной рамы 12, иллюстрированной на фигурах 1А-1С, множество первых взаимодействующих с землей инструментов расположены ниже основной рамы 12.
Множество вторых взаимодействующих с землей инструментов, то есть плужных корпусов 22b, 24b, 26b, 28b, 30b и предплужников 32b, 34b, 36b, 38b и 40b плуга, расположены на второй стороне основной рамы 12, напротив множества первых взаимодействующих с землей инструментов. В первой конфигурации основной рамы 12, иллюстрированной на фигурах 1А-1С, множество вторых взаимодействующих с землей инструментов расположены выше основной рамы.
Каждый из плужных корпусов 22а, 22b, 24а, 24b, 26а, 26b, 28а, 28b, 30а, 30b соединен с основной рамой 12 посредством балок 42, 44, 46, 48, 50. Каждая из балок 42, 44, 46, 48, 50 имеет, по существу, Y-образную структуру.
Первая балка 42 поддерживает первую пару плужных корпусов 22а, 22b. Вторая балка 44 поддерживает вторую пару плужных корпусов 24а, 24b. Третья балка 4 6 поддерживает третью пару плужных корпусов 26а, 26. Четвертая балка 48 поддерживает четвертую пару плужных корпусов 28а, 28b. Пятая балка 50 поддерживает пятую пару плужных корпусов 30а, 30b.
Каждая из пар плужных корпусов 22а, 22b, 24а, 24b, 26а, 26b, 28а, 28b, 30а, 30b предназначена для создания борозды в поле, когда плуг тянется позади или толкается сельскохозяйственным рабочим транспортным средством, таким как трактор. Из этого следует, что каждый проход иллюстрированного пашущего орудия 10 через поле создает пять смежных борозд.
Первая опорная балка 52 поддерживает первую пару предплужников 32а, 32b. Вторая опорная балка 54 поддерживает вторую пару предплужников 34а, 34b. Третья опорная балка 56 поддерживает третью пару предплужников 36а, 36b. Четвертая опорная балка 58 поддерживает четвертую пару предплужников 38а, 38b. Пятая опорная балка 60 поддерживает пятую пару предплужников 40а, 40b. Предплужники 32а, 32b, 34а, 34b, 36а, 36b, 38а, 38b, 40а, 40b и/или их соответствующие опорные балки могут быть регулируемыми относительно основной рамы 12 для изменения расстояния между предплужниками 32а, 32b, 34а, 34b, 36а, 36b, 38а, 38b, 40а, 40b и основной рамой. В одном примере предплужники 32а, 32b, 34а, 34b, 36а, 36b, 38а, 38b, 40а, 40b могут перемещаться вверх и вниз по направлению к основной раме 12 и от нее для индивидуальной регулировки рабочей глубины каждого из предплужников. Предплужники 32а, 32b, 34а, 34b, 36а, 36b, 38а, 38b, 40а, 40b могут быть регулируемыми вручную или автоматически.
Обращаясь к фиг. 2, описана типичная работа сельскохозяйственной машины, содержащей трактор 7 и пашущее орудие 10. При использовании, пашущее орудие 10 тянется как прицеп (орудие) позади сельскохозяйственного буксировочного транспортного средства (например, трактора 7). Следует понимать, что эквивалентно возможно расположить пашущее орудие 10 перед или как перед, так позади трактора 7.
Фиг. 2 показывает схему рабочей зоны 1, например, поля культуры, которое разделено на основное поле 3 и поворотные полосы 5, 6. Трактор 7 тянет пашущее орудие 10 по основному полю 3, в целом, параллельными рабочими рядами. Рабочие ряды являются частью траектории 8 трактора 7 и обычно проходят параллельно с длинным краем рабочей зоны 1. Каждый рабочий ряд представляет отдельный проход сельскохозяйственной машины по полю между поворотными полосами 5 и 6. Как будет более подробно описано ниже, пяти бороздовой плуг, такой как примерный плуг, показанный на фигурах 1А-1С, создает в общей сложности пять борозд за один проход.
В конце каждого прохода/рабочего ряда, трактор 7 и пашущее орудие 10 используют приближающуюся поворотную полосу 5 или 6 для разворота, как показано траекторией 8. В данной области техники известно, что почва поворотных полос 5, 6 подвержена более высоким уровням уплотнения почвы, поскольку она получает больше нагрузки на единицу площади, чем основное поле 3. Для того, чтобы не нарушать почву на поворотных полосах 5, 6 больше, чем это необходимо, известным является подъем взаимодействующих с землей инструментов, таких как плужные корпуса и предплужники, от земли в поворотной полосе, или транспортное положение непосредственно перед достижением пашущим орудием 10 поворотной полосы 5 или 6, соответственно. После того, как трактор 7 и соответствующее пашущее орудие 10 повернули на поворотной полосе 5, 6, взаимодействующие с землей инструменты пашущего орудия 10 снова опускаются в рабочее положение для зацепления с почвой основного поля 3.
На иллюстрации фиг. 2, пашущее орудие 10 работает на основном поле 3 и, следовательно, расположено в рабочем положении. Когда пашущее орудие 10 достигает границы между поворотной полосой 5, 6 и основным полем 3, пашущее орудие 10 переводится в поворотное/транспортное положение. Отсюда следует, что каждый рабочий ряд начинается с регулировки плуга из транспортного положения в рабочее положение и заканчивается регулировкой плуга из рабочего положения в транспортное положение.
Пашущее орудие 10, показанное на фигурах 1А-1С, является полностью установленного типа. В полностью установленных плугах, вес плуга переносится исключительно трактором, когда плуг находится в своем транспортном положении (на поворотной полосе).
Другими словами, плуг затем поддерживается исключительно трактором 7 через сцепку 14 и может подниматься над землей подъемным цилиндром рычажной передачи трактора.
Во время поворотного движения на поворотных полосах, пашущее орудие 10 также переворачивается. То есть основная рама 12 поворачивается на 180 градусов относительно сцепки 14 для перемещения плуга из первой конфигурации во вторую конфигурацию. Следует понимать, что если оператор пашет в борозде, то основная рама 12 может не поворачиваться точно на 180 градусов, скорее всего, она составит 190-200 градусов или 160-170 градусов в зависимости от того, в каком направлении основная рама 12 поворачивается. Если оператор пашет на земле, то основная рама 12 может быть повернута на угол, который ближе к 180 градусам, возможно, точно 180 градусов. То есть основная рама 12 поворачивается на 180 градусов относительно сцепки 14 для перемещения плуга из первой конфигурации во вторую конфигурацию.
В своей первой конфигурации, показанной на фигурах 1А-1С, пашущее орудие 10 настроено так, что множество первых взаимодействующих с землей инструментов, то есть плужные корпуса 22а, 24а, 26а, 28а и 30а и предплужники 32а, 34а, 36а, 38а, 40а каждой из пар находится в контакте с почвой. Эта первая конфигурация показана на фиг. 2 и иногда также называется «левосторонней конфигурацией», поскольку большинство плужных корпусов расположены слева от трактора 7. Во второй конфигурации (не иллюстрирована) пашущее орудие 10 настроено так, что множество вторых взаимодействующих с землей инструментов, то есть плужные корпуса 22b, 24b, 26b, 28b, 30b и предплужники 32b, 34b, 36b, 38b, 40b, находятся в контакте с почвой. Эта вторая конфигурация достигается после поворота основной рамы на 180 градусов, так что большинство плужных корпусов затем располагаются справа от трактора (не показано). Поэтому вторую конфигурацию также иногда называют «правосторонней конфигурацией».
Обработка поля пашущим орудием 10 в этой первой конфигурации обеспечивает первую борозду, созданную первым плужным корпусом 22а, вторую борозду, созданную вторым плужным корпусом 24а, третью борозду, созданную третьим плужным корпусом 26а, четвертую борозду, созданную четвертым плужным корпусом 28а и пятую борозду, созданную пятым плужным корпусом 30а. Ширина борозды определяется поперечным расстоянием d между плужными корпусами 22а, 22b, 24а, 24b, 2ба, 26b, 28а, 28b, 30а, 30b, как иллюстрировано на фиг. 1С.
Когда оборотное пашущее орудие 10 достигает конца первого прохода, основная рама 12 поворачивается на 180 градусов (переворачивается) относительно сцепки 14. Поворотный цилиндр (не показан), прикрепленный к сцепке 14, может использоваться для поворота (переворота) пашущего орудия 10. Во время поворота основной рамы, первое множество плужных корпусов, например, 22а, 24а, 2ба, 28а, 30а, переносятся на верхнюю часть пашущего орудия 10. В то же время, второе множество плужных корпусов, например, 22b, 24b, 26b, 28b, 30b, которые не использовались в предыдущем проходе, затем переносятся на нижний конец пашущего орудия 10 и будут погружаться в почву во время следующего прохода. Оборотный плуг затем находится во второй конфигурации (не показана).
Выполнение второго прохода поля пашущим орудием 10 в этой второй конфигурации обеспечивает первую борозду, созданную шестым плужным корпусом 22b, вторую борозду, созданную седьмым плужным корпусом 24b, третью борозду, созданную восьмым плужным корпусом 26b, четвертую борозду, созданную девятым плужным корпусом 28b, и пятую борозду, созданную десятым плужным корпусом 30b.
Переворачивание пашущего орудия 10 между последовательными проходами имеет то преимущество, что плужные корпуса 22а, 22b, 24а, 24b, 26а, 26b, 28а, 28b, 30а, 30b, которые зацепляются с почвой, всегда обращены к одному и тому же боковому краю основного поля 3, независимо от ориентации трактора.
В обеих конфигурациях пашущего орудия 10, основная рама 12 поддерживается колесом 20 орудия. Колесо 20 орудия расположено на заднем конце 18 пашущего орудия 10. Поскольку плужные корпуса 22а, 22b, 24а, 24b, 26а, 26b, 28а, 28b, 30а, 30b и предплужники 32а, 32b, 34а, 34b, 36а, 36b, 38а, 38b, 40а, 40b обычно прикреплены к основной раме через балки 42, 44, 46, 48 и 50, это не позволяет регулировать рабочую глубину упомянутых взаимодействующих с землей инструментов, не изменяя расстояние от поверхности земли основной рамы 12. Для этого плуг 10, показанный на фигурах 1А-1С, включает в себя колесо 20 орудия, которое действует как опорное колесо для регулировки расстояния от поверхности земли основной рамы 12. Тяга 62, предусмотренная между колесом 20 орудия и основной рамой 12, позволяет оператору поднимать или опускать основную раму 12 относительно поверхности 80 земли. Тяга 62 может быть соединена с приводом, например, гидравлическим цилиндром (не показан) для регулировки расстояния между колесом 20 орудия и основной рамой, тем самым поднимая и опуская основную раму. Тяга 62 и привод вместе образуют устройство регулировки глубины для плужных корпусов 22а, 22b, 24а, 24b, 26а, 26b, 28а, 28а, 28b, 30а, 30b и предплужников 32а, 32b, 34а, 34b, 36а, 36b, 38а, 38б, 40а, 40b. Поскольку положение множества первого и второго взаимодействующих с землей инструментов фиксировано относительно основной рамы 12, любое изменение расстояния от поверхности земли основной рамы также будет влиять на рабочую глубину множества первых и вторых взаимодействующих с землей инструментов. В частности, если основная рама 12 опускается путем укорачивания тяги 62 между колесом 20 орудия и основной рамой 12, то рабочая глубина множества первых взаимодействующих с землей инструментов, показанных на фигурах 1А-1С, увеличивается, то есть множество первых взаимодействующих с землей инструментов опускаются дополнительно в/к почве. Если, с другой стороны, основная рама 12 поднимается посредством растяжения тяги 62 между колесом 20 орудия и основной рамой 12, то рабочая глубина множества первых взаимодействующих с землей инструментов уменьшается, т.е. множество первых взаимодействующих с землей инструментов поднимаются.
Возвращаясь к фиг. 1С, следует понимать, что расстояние d между плужными корпусами 22а/22b, 24а/24b, 26а/26b, 28а/28b и 30а/30b является регулируемым. В варианте осуществления пашущего орудия 10, показанного на фигурах 1А-1С, поперечное расстояние d является регулируемым посредством поворота основной рамы 12 в горизонтальной плоскости, например в плоскости, показанной на фиг. 1С. Другими словами, основная рама 12 соединена со сцепкой 14 через ось 80 поворота. Основная рама 12 может поворачиваться вокруг оси 80 поворота относительно сцепки 14 и, таким образом, также относительно сельскохозяйственного рабочего транспортного средства (не показана), которое соединено со сцепкой 14.
При нормальной работе, продольная ось L1 основной рамы 12 расположена под углом α относительно продольной оси L2 соответствующего сельскохозяйственного рабочего транспортного средства. Следует понимать, что угол α между продольной осью L1 основной рамы 12 и продольной осью L2 сельскохозяйственного рабочего транспортного средства может быть изменен посредством поворота основной рамы вокруг оси 80 поворота. Механизм 82 регулировки ширины плуга содержит ось 80 поворота, соединительную пластину 84, переднюю часть 86 основной рамы 12 и привод 88 регулировки ширины. Привод 88 регулировки ширины в этом варианте осуществления представляет собой гидравлический цилиндр. При втягивании привода 88 регулировки ширины, передняя часть 86 основной рамы 12 будет притягиваться ближе к соединительной пластине 84, тем самым увеличивая угол α между продольной осью L1 основной рамы 12 и продольной осью L2 сельскохозяйственного рабочего транспортного средства. По мере того как угол α между продольными осями L1, L2 увеличивается, увеличивается и поперечное расстояние d между смежными плужными корпусами 22а-30b. Аналогично, если привод 88 выдвигается, основная рама 12 поворачивается против часовой стрелки на фиг. 1С вокруг оси 80 поворота, тем самым уменьшая угол α между продольной осью L1 основной рамы 12 и продольной осью L2 сельскохозяйственного рабочего транспортного средства. По мере того как угол α между продольными осями L1, L2 уменьшается, поперечное расстояние d между смежными плужными корпусами 22а-30b уменьшается.
Хотя это конкретно не представлено на фиг. 1С, также следует понимать, что при увеличении угла α между осями L1, L2 поперечное расположение основной рамы и плужных корпусов 22а-30b относительно сельскохозяйственного рабочего транспортного средства (не показано) изменяется. Это связано с тем, что при манипулировании углом α, центр М пашущего орудия перемещается вдоль круглого сегмента S. Соответственно, когда угол α увеличивается, центр М пашущего орудия 10 перемещается к нижней части фиг. 1С. Аналогичным образом, если угол α уменьшается, центр М пашущего орудия 10 перемещается в направлении верхнего конца на фиг. 1С.
Поперечная регулировка плужных корпусов относительно сельскохозяйственного рабочего транспортного средства также возможна без изменения угла α между основной рамой 12 и сельскохозяйственным рабочим транспортным средством. В варианте осуществления пашущего орудия 10, показанного на фигурах 1А-1С, сцепка 14 может включать механизм скольжения, который обеспечивает поперечное перемещение основной рамы 12 относительно сцепки 14 и, следовательно, относительно сельскохозяйственного рабочего транспортного средства. Один вариант осуществления механизма скольжения показан, например, на фиг. 3. Сцепка 14 и части механизма 82 регулировки ширины плуга более подробно показаны на фиг. 3. Как показано, сцепка 14 включает направляющую 90 скольжения, которая позволяет звену 84 скользить в боковом направлении Y относительно сцепки 14. Скользящее движение звена 84 приводит к поперечному движению всей основной рамы 12 и соответствующих частей (например, плужных корпусов), прикрепленных к основной раме 12.
Скользящее движение звена 84 и, следовательно, основной рамы 12 относительно сцепки 14 в поперечном направлении Y на фиг. 3 достигается посредством механизма 92 ходового винта. Вращение ходового винта 92 будет заставлять первое звено 84 скользить относительно направляющей 90 скольжения в поперечном направлении Y. Ходовой винт 92 может вращаться посредством электрического двигателя (не показан). В альтернативных вариантах осуществления, ходовой винт 92 может быть заменен альтернативными приводными механизмами, такими как механизмы, включающие в себя гидравлические или пневматические цилиндры, для скольжения основной рамы 12 относительно сцепки 14 в поперечном направлении, таким образом, регулируя поперечное расположение плужных корпусов и пашущего орудия 10 в целом относительно сельскохозяйственного рабочего транспортного средства (не показано).
Из вышеприведенного будет понятно, что поперечное расположение пашущего орудия 10 относительно сельскохозяйственного транспортного средства может быть изменено различными способами, два из которых были изложены выше. Следует также отметить, что регулировка в поперечном направлении пашущего орудия 10 относительно сельскохозяйственного рабочего транспортного средства 7 не требует поперечного перемещения каждой части пашущего орудия 10 в поперечном направлении. Скорее, поперечное боковое регулирование пашущего орудия может быть достигнуто простым изменением поперечного положения одного или нескольких взаимодействующих с землей инструментов, таких как плужные корпуса пашущего орудия.
Ссылаясь к фиг. 4, показан схематичный вид варианта осуществления системы 200 для регулировки поперечного расположения по меньшей мере одного плужного корпуса пашущего орудия 10 относительно сельскохозяйственного рабочего транспортного средства 7. Система 200 может включать в себя блок 202 управления, установленный и/или иным образом предусмотренный в связи с пашущим орудием 10. В некоторых вариантах осуществления, система может дополнительно или альтернативно включать в себя блок 204 управления, который связан с сельскохозяйственным рабочим транспортным средством 7, таким как тягач (например, трактор). Или блок 202 управления, связанный с пашущим орудием 10, и/или блок 204 управления, связанный с рабочим транспортным средством 7, может быть способен осуществлять электронное управление работой одного или нескольких компонентов пашущего орудия, например, посредством электронного управления работой один или более взаимодействующих с землей инструментов через соответствующие приводы 208. Аналогично, или блок 202 управления орудия, или блок 204 управления сельскохозяйственным рабочим транспортным средством 7 может быть способен управлять работой одного или нескольких компонентов сельскохозяйственного рабочего транспортного средства 7.
Блок 202 управления, связанный с пашущим орудием 10, может включать в себя один или более процессоров 212, связанных с одним или несколькими устройствами 214 памяти. Аналогично, блок 204 управления, связанный с сельскохозяйственным рабочим транспортным средством 7, также может включать в себя один или более процессоров 216, соединенных с одним или несколькими устройствами 218 памяти. Блок 202 управления пашущего орудия 10 и блок 204 управления сельскохозяйственного рабочего транспортного средства 7 могут сообщаться друг с другом, как указано стрелками 220, 222. Например, блок 202 управления орудия может передавать текущие данные о поле, обнаруженные датчиками 224 орудия, на блок 204 управления рабочего транспортного средства. Аналогично, блок 204 управления сельскохозяйственного рабочего транспортного средства 7 может связываться с блоком 202 управления орудия через линию 220 связи для передачи данных, определенных датчиками 226 рабочего транспортного средства, или прямых команд оператора, введенных через одно или более устройств 228 ввода. Блок 204 управления сельскохозяйственного рабочего транспортного средства 7 также может быть соединен с одним или несколькими клапанами 230, такими как гидравлические клапаны. Клапаны 230 могут быть частью гидравлической системы (не показана), расположенной на сельскохозяйственном рабочем транспортном средстве 7. Посредством управления клапанами 230, блок 204 управления может управлять подачей гидравлической жидкости из гидравлической системы к приводам 208 пашущего орудия 10 через линии 232 для текучей среды. Аналогичным образом, один или более клапанов 236 могут быть расположены на пашущем орудии 10 для управления одним или несколькими приводами пашущего орудия 10. Опять же, клапанами 236 можно управлять посредством блока 202 управления пашущего орудия 10 и/или блока 204 управления рабочим транспортным средством 7. Следует понимать, что, как правило, может потребоваться только один блок 202 или 204 управления для управления как пашущим орудием 10, так и сельскохозяйственным рабочим транспортным средством 7 вместе с их соответствующим оборудованием. Блок (блоки) управления также может быть расположен удаленно как от сельскохозяйственного рабочего транспортного средства 7, так и от пашущего орудия 10.
Один или более приводов 208 могут быть частью одного или нескольких приводных механизмов (механизма), которые выполнены с возможностью перемещения частей пашущего орудия 10 в поперечном направлении относительно сельскохозяйственного рабочего транспортного средства 7. В одном примере один или более приводов 208 могут соответствовать гидравлическому приводу 88, связанному с механизмом регулировки ширины плуга, описанным со ссылкой на фиг. 1С. Альтернативно, один или более приводов 208 могут соответствовать приводу механизма поперечного скольжения, показанного на фиг. 3. Соответственно, приводы 208 могут использоваться для изменения поперечного положения пашущего орудия по отношению к сельскохозяйственному рабочему транспортному средству 7 в зависимости от сигнала управления приводом, полученного от любого из блоков 202, 204 управления.
Блок 202 управления орудием и/или блок 204 управления сельскохозяйственным рабочим транспортным средством 7 способны автоматически управлять работой приводного механизма, который выполнен с возможностью перемещения частей (например, основной рамы и/или одного или нескольких плужных корпусов) пашущего орудия в поперечном направлении в отношении к сельскохозяйственному рабочему транспортному средству. В этой спецификации, термин «автоматическое управление» относится к способности блоков 202 и/или 204 управления регулировать поперечное положение частей пашущего орудия 10 независимо от ввода оператора. Скорее, блоки 202, 204 управления выполнены с возможностью приема данных о поле, указывающих состояние поля, по которому перемещается пашущее орудие 10. Данные о поле, принятые блоком 202 управления пашущего орудия 10 и/или блоком 204 управления сельскохозяйственным рабочим транспортным средством 7, могут быть получены из различных источников.
В одном варианте осуществления, один или более датчиков 224 пашущего орудия 10 и/или один или более датчиков 226 рабочего транспортного средства 7 могут использоваться для определения данных о поле в реальном времени, связанных с состоянием поля, поля, через которое пашущее орудие 10 перемещается. С этой целью, датчики 224, 226 могут включать в себя множество различных типов датчиков для определения различных данных, связанных с состоянием поля.
В одном примере показанном на фиг. 2, датчики 226 сельскохозяйственного рабочего транспортного средства 7 включают в себя оптические датчики 74 и 76. Первый оптический датчик 74 может быть соединен с передним концом рабочего транспортного средства 7. Первый датчик 74 может использоваться для определения состояния поля впереди сельскохозяйственного рабочего транспортного средства 7. Например, первый датчик 74 может быть способен определять контуры поля перед сельскохозяйственным рабочим транспортным средством и, следовательно, также перед пашущим орудием 10. Первый датчик 74 также может определять данные о поле, которые указывают на препятствия 78 перед пашущим орудием 10. Первый оптический датчик 74 может предоставлять такие данные о поле, относящиеся к состоянию поля перед рабочим транспортным средством 7, одному или обоим из блоков 202, 204 управления.
Второй оптический датчик 76 может быть расположен на боковой стороне сельскохозяйственного рабочего транспортного средства 7 или, альтернативно, на боковой стороне пашущего орудия 10. Второй оптический датчик 76 может использоваться для определения данных о поле, указывающих состояние поля в следующем рабочем ряду. Такие данные о поле могут указывать на контуры поля в следующем рабочем ряду или препятствия вдоль следующего рабочего ряда (например, камни), которые необходимо избегать взаимодействующему с землей инструменту пашущего орудия 10.
Конечно, оптические датчики, такие как RGB, NIR и/или ИК-датчики, также могут быть установлены на сельскохозяйственном орудии. Оптические датчики 74, 76 являются всего лишь двумя конкретными примерами датчиков, которые могут использоваться для определения текущих данных о поле, которые возвращаются в один или оба из блоков 202, 204 управления. Другие датчики могут включать в себя:
датчики влажности, для определения параметра влажности, указывающего содержание влаги в почве;
датчики сопротивления, для определения параметров, указывающих уровни плотности почвы в почве;
датчики температуры, для определения температуры почвы;
датчики уровня, для определения параметров, указывающих контуры поля, ультразвуковые или радиолокационные датчики (например, LIDAR) для определения подземных препятствий или других характеристик грунта.
Большинство вышеприведенных датчиков могут быть прикреплены либо к сельскохозяйственному рабочему транспортному средству 7, либо к пашущему орудию 10, либо даже к части отдельного устройства, такого как другое сельскохозяйственное рабочее транспортное средство или беспилотник, сканирующий рабочую зону перед или позади сельскохозяйственного рабочего транспортного средства 7 и пашущего орудия 10.
Дополнительные примеры включают в себя датчики, которые определяют данные орудия, указывающие на работу пашущего орудия, такие как:
датчик местоположения, для непрерывного или периодического определения положения пашущего орудия 10 в поле, параметра, который может использоваться для определения скорости пашущего орудия 10 и/или соответствующего сельскохозяйственного рабочего транспортного средства 7;
датчик скорости, непосредственно определяющий скорость пашущего орудия 10 и/или соответствующего сельскохозяйственного рабочего транспортного средства 7;
датчик усилия, для определения торможения/сопротивления, испытываемого пашущим орудием 10 или по меньшей мере одним взаимодействующим с землей инструментом;
датчик проскальзывания колеса, для определения параметра, указывающего на проскальзывание колеса, испытываемое колесом 20 пашущего орудия 10 и/или колесом соответствующего сельскохозяйственного рабочего транспортного средства 7.
Каждый из датчиков, описанных выше, может быть прямо или косвенно связан с одним или обоими из блоков 202 и 204 управления, связанных с пашущим орудием 10 и/или рабочим транспортным средством 7. Датчики снабжают блоки 202, 204 управления данными, включающими в себя текущие данные о поле, и реализуют данные, описанные выше.
Рабочее транспортное средство 7 системы 200, показанной на фиг. 4, также может включать в себя дисплей 234 для обеспечения обратной связи с оператором. Дисплей 234 может использоваться для иллюстрации текущего поперечного положения пашущего орудия 10. Согласно другим вариантам осуществления, блоки 202, 204 управления могут также отображать на дисплее 234 предполагаемые изменения поперечного положения во время операции вспашки. Оператор может иметь возможность отмены любого предполагаемого изменения поперечного положения пашущего орудия через устройства 228 ввода. Тем не менее, следует понимать, что ввод оператора обычно не требуется для системы 200 для изменения поперечного положения любой части пашущего орудия 10.
На основе данных, предоставленных датчиками, блоки 202, 204 управления могут извлекать или рассчитывать требуемое поперечное расположение пашущего орудия 10 (или его частей) относительно сельскохозяйственного рабочего транспортного средства 7. С этой целью, соответствующие запоминающие устройства 214, 218 блоков 202, 204 управления могут включать в себя справочную таблицу и/или базу данных с массивом поперечных положений частей пашущего орудия 10, связанных с различными данными о поле, которые могут быть приняты от датчиков 224, 226, описанных выше. Альтернативно или дополнительно, запоминающие устройства 214, 218 могут включать в себя заранее определенный алгоритм для вычисления требуемого поперечного расположения на основе данных о поле. Такие заранее определенные алгоритмы могут затем применяться к данным о поле, принятым соответствующими процессорами 212, 216. Не исключающие примеры данных о поле, полученных блоком (блоками) управления 202, 204, изложены ниже:
данные контура земли, связанные с текущими или предыдущими контурами земли поля, по которому перемещается пашущее орудие;
данные о препятствиях, связанные с текущими или предыдущими местоположениями препятствий в поле, через которое перемещается пашущее орудие;
данные о плотности почвы, связанные с текущими или предыдущими плотностями почвы в пределах поля, по которому перемещается пашущее орудие.
Более конкретные примеры данных контура земли приведены ниже:
Наклонные поверхности земли, будь то наклоны или спады или в продольном направлении, или в поперечном направлении плуга, могут быть обнаружены датчиком на сельскохозяйственном рабочем транспортном средстве и/или пашущем орудии и предоставлены в качестве текущих (или оперативных) данных контура земли, которые приобретаются во время работы сельскохозяйственного плуга. Другие примеры текущих данных о контуре земли включают данные, определяемые датчиком уровня на сельскохозяйственном рабочем транспортном средстве или пашущем орудии. Датчик уровня может обеспечивать информацию об уклоне поверхности земли, по которой перемещается сельскохозяйственный плуг. Параметры, определенные датчиком уровня, затем передаются обратно в блок управления в качестве текущих данных контура земли.
Вместо того, чтобы определять данные контура земли во время работы сельскохозяйственного плуга (текущие или оперативные данные контура земли), также возможно использовать предыдущие (или заранее определенные) контуры земли, хранящиеся в памяти, доступной для блока управления или сельскохозяйственного транспортного средства или пашущего орудия. Такие предыдущие данные контура земли могут быть определены до начала операции вспашки, например, посредством спутниковых снимков, другой сельскохозяйственной техники или даже беспилотников. В качестве альтернативы, предыдущие данные о контуре земли могут быть получены при предыдущих прогонах того же поля сельскохозяйственным плугом, таких как операции вспашки, выполненные в предыдущие годы. Предыдущие данные контура земли поля могут содержать, по существу, те же параметры, что и текущие (оперативные) данные контура земли, например, как склоны, гребни и впадины на поле.
Данные о препятствиях могут обеспечивать местоположение препятствий в поле, определяемых как текущие/оперативные данные посредством датчиков на сельскохозяйственном транспортном средстве и/или пашущем орудии. Один из примеров таких датчиков описан со ссылкой на фиг. 2 и обеспечивает оперативные обновления препятствий перед пашущим орудием. Препятствия могут относиться к любой части поля, которая не должна проходиться частями или всем пашущим орудием. Одним примером данных о препятствиях может быть местоположение камня в почве, который не должен встречаться ни с одним из плужных корпусов пашущего орудия.
Подобно предыдущим контурам земли, описанным выше, ранее идентифицированные местоположения препятствий могут использоваться в качестве предыдущих данных о препятствиях, обеспеченных блоку управления. Соответственно, предыдущие данные о препятствиях могут относиться к данным о препятствиях, которые определяются до начала операции вспашки, или посредством подходящих датчиков, или во время предыдущих проходов того же поля.
Данные о плотности почвы могут включать параметры, связанные с текущей или предыдущей плотностью почвы в пределах поля. Такими параметрами могут быть уровни уплотнения почвы и/или содержание влаги в рассматриваемой почве.
Не исключающие примеры сигналов управления приводом, определяемых блоком управления на основе некоторых из приведенных выше примеров данных о поле, изложены ниже:
Если сельскохозяйственный плуг движется по поперечному склону, блок управления может устанавливать сигнал управления приводом так, чтобы части пашущего орудия перемещались вверх по склону относительно сельскохозяйственного рабочего транспортного средства. В этом отношении, перемещение «по склону» относится к перемещению сельскохозяйственного плуга не только вверх, но и вниз по склону. Скорее это относится к любому движению плуга вдоль/поперек склона.
В одном примере сигнал управления приводом может заставить блок управления вытягивать или втягивать привод 88 (фиг. 1С) таким образом, что основная рама 12 сельскохозяйственного орудия 10 поворачивается вверх склона. Другими словами, центр М основной рамы 12 будет перемещаться в поперечном направлении вверх склона от силы тяжести.
В другом примере блок управления может создавать сигнал управления приводом, который приводит к скользящему движению механизма поперечного скольжения, показанного на фиг. 3, так что основная рама смещается в поперечном направлении вверх склона.
Блок управления может определять сигнал управления приводом, который сдвигает или поворачивает основную раму в поперечном направлении, чтобы избежать столкновения с препятствием, определяемым данными о поле. На иллюстрации фиг. 2, препятствия 7 8 можно избежать посредством смещения основной рамы 12 пашущего орудия 10 к нижней части фиг. 2. Эта поперечная регулировка основной рамы может быть достигнута либо посредством механизма поперечного скольжения на фиг. 3, либо механизма регулировки ширины плуга, показанного на фиг. 1С.
Блок управления может определять сигнал управления приводом в ответ на данные о поле, указывающие, что сельскохозяйственный плуг идет вверх или вниз по склону. Если данные о поле указывают, что сельскохозяйственный орудие идет или будет подниматься по продольному склону, блок управления может установить сигнал управления приводом так, чтобы механизм регулировки ширины плуга уменьшал расстояние d между плужными корпусами, чтобы уменьшить сопротивление на пути вверх по склону. Аналогично, если данные о поле указывают, что сельскохозяйственное транспортное средство движется или будет двигаться вниз по склону, блок управления может установить сигнал управления приводом так, чтобы механизм регулировки ширины плуга увеличивал угол α на фиг. 1С для увеличения ширины плуга, тем самым увеличивая сопротивление, чтобы уменьшить скорость сельскохозяйственного транспортного средства вниз по склону.
Если данные о поле указывают на то, что почва перед или в настоящее время вспахиваемая сельскохозяйственным плугом имеет высокую плотность, блок управления может установить сигнал управления приводом таким образом, что части пашущего орудия перемещаются в поперечном направлении посредством механизма регулировки ширины плуга. В частности, в более плотных почвах, сигнал управления приводом может быть установлен так, чтобы уменьшать угол α между продольной осью L1 основной рамы и продольной осью L2 сельскохозяйственного транспортного средства, тем самым уменьшая сопротивление в условиях более плотной почвы. Напротив, если плотность почвы низкая, блок управления может устанавливать сигнал управления приводом так, что угол α увеличивается, тем самым увеличивая ширину плуга и соответствующее сопротивление пашущего орудия.
Данные контура могут содержать усредненные данные контура, например, усредненные по ширине плуга (для данных поперечного контура) или усредненные по длине плуга (для данных продольного контура). Это может быть использовано для улучшения операции вспашки для большинства плужных корпусов на пашущем орудии и обеспечения общего хорошего управления приводным механизмом, так что он не регулируется слишком часто. Также, использование такого усредненного значения может рассматриваться как ожидание для определения, сохраняется ли какая-либо неравномерность достаточно долго, чтобы гарантировать изменение поперечного расположения пашущего орудия относительно сельскохозяйственного рабочего транспортного средства.
Следует понимать, что изменение поперечного положения может основываться на одном или нескольких данных о поле, рассмотренных выше.
Обращаясь к фиг. 5, показана блок-схема последовательности операций способа регулировки поперечного положения частей пашущего орудия (например, одного или нескольких плужных корпусов) относительно сельскохозяйственного рабочего транспортного средства согласно варианту осуществления настоящего изобретения. В этом варианте осуществления, блок управления будет принимать данные о поле от датчика, который или соединен, или связан с пашущим орудием 10 и/или сельскохозяйственным рабочим транспортным средством 7.
Более подробно, на первом этапе S302, блок управления принимает данные о поле, указывающие условия поля, поля, по которому перемещается пашущее орудие. В способе 300, показанном на фиг. 5, данные о поле принимаются от датчика, который определяет одно или более оперативных данных, связанных с состоянием поля. В одном варианте осуществления, описанном выше со ссылкой на фиг. 2, может быть предусмотрен оптический датчик 74 для определения параметров, указывающих контуры поля перед сельскохозяйственным рабочим транспортным средством 7. Этот параметр контура поля возвращается датчиком обратно в блок управления, который связан или с сельскохозяйственным рабочим транспортным средством 7, или с пашущим орудием 10. Блок управления может использовать данные о поле, определенные датчиком, для определения поперечного склона в поле.
На основе информации, принятой блоком S302 управления, блок управления может, при необходимости, искать и/или вычислять требуемое поперечное положение пашущего орудия (или его частей) на этапе S304. В одном примере требуемое поперечное положение может быть изменено, чтобы компенсировать гравитационные силы, действующие на пашущее орудие из-за наклонного контура земли, как будет описано более подробно со ссылкой на фиг. 6.
На другом возможном этапе S306, блок управления может определять текущее поперечное положение соответствующих частей пашущего орудия относительно сельскохозяйственного рабочего транспортного средства. Как обсуждалось выше, это может быть выполнено или дополнительными датчиками, такими как датчики, определяющие положение гидравлических приводов устройства регулировки глубины, или может быть извлечено из базы данных в памяти блока управления.
На дополнительном возможном этапе S308, блок управления может сравнивать требуемое поперечное положение с определенным текущим поперечным положением. На возможном этапе S310, блок управления сравнивает разницу между требуемым поперечным положением и текущим поперечным положением с заданным пороговым значением. Пороговое значение может быть установлено производителем или оператором до или во время операции вспашки. Если на этапе S310 разница между требуемым поперечным положением и текущим поперечным положением определяется как превышающая пороговое значение, то способ 300 может перейти к этапу S312. В противном случае, если разница между требуемым поперечным положением и текущим поперечным положением ниже порогового значения, способ 300 перезапускается с этапа S302, описанного выше.
На этапе S312, поперечное положение по меньшей мере одного взаимодействующего с землей инструмента регулируется посредством привода, управляемого блоком управления. Следует отметить, что этапы S304-S310 являются возможными этапами, которые улучшат точность регулировки поперечного положения. Однако также возможно удалить этапы S304-S310 и выполнить поперечную регулировку на этапе S312 непосредственно в ответ на данные о поле, принятые на этапе S302. Например, если данные датчика указывают на контуры поля, и блок управления впоследствии определяет наличие поперечного склона, блок управления может непосредственно перемещать части пашущего орудия в поперечном направлении вверх по склону относительно рабочего транспортного средства на этапе S312 без учета точного требуемого поперечного положения или текущего поперечного положения. В другом варианте осуществления, если данные датчика указывают на контуры поля, и блок управления впоследствии определяет наличие поперечного склона в поле, блок управления может определять требуемое увеличение поперечного положения и игнорировать текущее поперечное положение.
Дополнительный возможный этап S314 для обновления базы данных новым поперечным положением пашущего орудия может следовать за этапом S312. На этапе S314, блок управления может определять поперечное положение пашущего орудия относительно рабочего транспортного средства после регулировки на этапе S312 и сохранять это значение в базе данных памяти блока управления как новое «текущее поперечное положение». Таким образом, записи в базе данных текущего поперечного положения постоянно обновляются, поскольку поперечное положение корректируется механизмом регулировки.
Как только база данных была обновлена с новым поперечным положением, способ 300 может быть перезапущен на этапе S302 для приема данных о поле, указывающих состояние поля и/или работу пашущего орудия.
Фиг. 6 схематично представляет сельскохозяйственную пашущую систему 400 на поперечном склоне. Сельскохозяйственная пашущая система содержит сельскохозяйственное рабочее транспортное средство 407 и сельскохозяйственное пашущее орудие 410. В этом примере пашущее орудие 410 прикреплено к задней части сельскохозяйственного рабочего транспортного средства 407. Однако следует понимать, что пашущее орудие 410 также может быть прикреплено к передней части сельскохозяйственного рабочего транспортного средства 407.
Как показано на фиг. 6, поверхность 480 земли имеет наклон в поперечном направлении, то есть она снижается с одной стороны плуга 400 к другой. Термин «поперечный склон» или «поперечно наклонный» следует понимать как относящийся к наклону, поперечному направлению движения плуга 400. Поверхность 480 земли может находиться под углом β по отношению к горизонтальной плоскости А. По мере того, как сельскохозяйственный плуг 400 перемещается по наклонной в поперечном направлении поверхности 480 земли, сельскохозяйственное транспортное средство 407 и пашущее орудие 410 наклоняются к нижней части склона. Одним из последствий этого поперечного наклона является то, что сила тяжести будет тянуть пашущее орудие 410 вниз по склону в направлении В, что может привести к боковому смещению пашущего орудия 410 относительно сельскохозяйственного рабочего транспортного средства 407. Чтобы противодействовать этому боковому смещению, вызванному гравитационными силами, блок управления (не показан) сельскохозяйственной пашущей системы может быть выполнен с возможностью поперечной регулировки положения пашущего орудия 410 относительно сельскохозяйственного транспортного средства 407 в направлении С.
Как указывалось ранее, поперечная регулировка может быть достигнута или посредством перемещения основной рамы в направлении С механизмом поперечного скольжения, или посредством поворота основной рамы пашущего орудия 410 механизмом регулировки ширины плуга в направлении С.
Чтобы идентифицировать поперечную наклонную поверхность 480, блок управления может принимать данные о поле, которые или сохранены в памяти (например, в базе данных или справочной таблице) блока управления, или принимаются в качестве оперативных данных от датчика. В примере на фиг. 2 данные о поле могут быть данными контура земли, определенными передним датчиком 74. В частности, датчик 74 может быть способен оптически идентифицировать особенности наклонной поверхности 480 земли и предоставлять измеренные параметры блоку управления. Блок управления может рассчитывать сигнал управления приводом для приводного механизма, который сдвигает части пашущего орудия 410 (например, основную раму и плужные корпуса) вверх по склону в направлении С относительно сельскохозяйственного транспортного средства 407, на основе данных контура земли, полученных датчиком 74.
В альтернативном варианте осуществления,
сельскохозяйственная пашущая система может включать в себя датчик уровня для определения данных контура земли, связанных с наклонной в поперечном направлении поверхностью 480 земли на фиг. 6. Опять же, эти оперативные данные могут быть переданы в блок управления, который на основании этих данных контура земли от датчика уровня, определяет сигнал управления приводом для перемещения пашущего орудия 10 в поперечном направлении вверх по склону в направлении С.
Обращаясь к фиг. 7, показан другой вариант осуществления сельскохозяйственной пашущей системы 500 согласно настоящему раскрытию. Сельскохозяйственная пашущая система 500 содержит сельскохозяйственное рабочее транспортное средство 507 и пашущее орудие 510.
В варианте осуществления по фиг. 7, сельскохозяйственная пашущая система 500 движется вверх по продольно наклонной поверхности 580 земли. Поверхность 580 земли продолжается под углом γ по отношению к горизонтальной плоскости А. Понятно, что термин «продольно наклоненный» относится к наклону, параллельному направлению D перемещения сельскохозяйственной пашущей системы 500. В этом варианте осуществления, направлением D перемещения сельскохозяйственной пашущей системы 500 является вверх по продольному склону 580, так что склон 580 вызывает наклон в продольном направлении сельскохозяйственной пашущей системы 500.
Подобно варианту осуществления, показанному на фигурах, описанных в отношении фиг. 6, могут быть предусмотрены различные датчики или справочные таблицы/базы данных, чтобы снабжать блок управления данными о поле, указывающими параметры продольно наклонной поверхности 580. На основании этих данных о поле, блок управления (не показан) определяет сигнал управления приводом для приводного механизма, такого как механизм регулировки ширины плуга, поясненный выше.
В примере, показанном на фиг. 7, блок управления может определять сигнал управления приводом, который приводит к тому, что механизм регулировки ширины плуга действует для поворота основной рамы 512 пашущего орудия 510 относительно оси 580 поворота, так что ширина плуга пашущего орудия 510 уменьшается. Уменьшение ширины плуга будет уменьшать сопротивление, испытываемое сельскохозяйственным рабочим транспортным средством 507, и поддерживать движение вверх по склону в направлении D. Соответственно, блок управления может сохранять пашущее орудие 510 установленным на уменьшенную ширину плуга до тех пор, пока сельскохозяйственная пашущая система 500 перемещается вверх по склону в продольном направлении. Аналогичным образом, блок управления может быть выполнен с возможностью увеличения ширины плуга по мере того, как сельскохозяйственная пашущая система 500 движется вниз, так что сопротивление увеличивается и достигается постоянная скорость вспашки по полю. Ширина плуга может быть изменена в зависимости от склона.
В одном варианте осуществления, ширина плуга будет изменяться только один раз на рабочий ряд. Например, на основе данных о поле, блок управления может определить требуемую ширину плуга, которая применяется ко всему рабочему ряду. Это может быть выполнено посредством усреднения числа различных требуемых значений ширины вспашки для разных участков рабочего ряда. Например, если блок управления определяет, что сельскохозяйственный плуг будет перемещаться вверх по склону на то же расстояние, что и спуск, он может установить ширину плуга на значение, которое является средним требуемым значением для движения вверх по склону, и требуемым уровнем для движения вниз по склону.
Перечисление или обсуждение явно ранее опубликованного документа в этой спецификации не обязательно должно восприниматься как подтверждение того, что документ является частью уровня техники или является общеизвестным.
Предпочтения и варианты для данного аспекта, признака или параметра изобретения, если в контексте не указано иное, должны рассматриваться как раскрытые в комбинации с любыми и всеми предпочтениями и вариантами для всех других аспектов, признаков и параметров изобретения.
Реферат
Настоящее изобретение относится к сельскохозяйственной пашущей системе, способу ее работы и машиночитаемому носителю, содержащему компьютерную программу, выполненную с возможностью осуществления данного способа. Система содержит сельскохозяйственное рабочее транспортное средство и пашущее орудие, соединенное с сельскохозяйственным рабочим транспортным средством и содержащее по меньшей мере один взаимодействующий с землей инструмент по меньшей мере один приводной механизм, выполненный с возможностью перемещения пашущего орудия в поперечном направлении относительно сельскохозяйственного рабочего транспортного средства. Блок управления выполнен с возможностью приема данных о поле, указывающих условия поля, по которому перемещается сельскохозяйственная пашущая система, автоматического определения сигнала управления приводом для приводного механизма на основе данных о поле. Сигнал управления приводом предназначен для перемещения пашущего орудия в поперечном направлении относительно сельскохозяйственного рабочего транспортного средства на основе принятых данных о поле. Изобретение способствует решению проблем регулировки поперечного положения пашущего орудия относительно рабочего транспортного средства. 3 н. и 12 з.п. ф-лы, 9 ил.
Формула
Документы, цитированные в отчёте о поиске
Сельскохозяйственная рабочая система
Система и способ управления обработкой почвы сельскохозяйственным орудием
Комментарии