Сельскохозяйственная рабочая система - RU2633559C2
Код документа: RU2633559C2
Чертежи
Описание
Область техники
Настоящее изобретение относится к сельскохозяйственной рабочей системе с самоходной сельскохозяйственной рабочей машиной в соответствии с ограничительной частью пункта 1 формулы изобретения, причем рабочая машина может быть оснащена почвообрабатывающим орудием, таким как плуг, культиватор или борона, а также к системе управления для такой рабочей системы в соответствии с ограничительной частью пункта 14 формулы изобретения.
Такими сельскохозяйственными рабочими машинами могут быть, например, тракторы, автопогрузчики, в частности телескопические погрузчики, а также самоходные уборочные и подобные машины.
Уровень техники
Известная рабочая система (EP 1338934 A1), которая служит исходным источником для настоящего изобретения, включает в себя трактор, который может быть оснащен различными навесными агрегатами. Для управления всеми существенными для привода компонентами, в частности содержащей приводной двигатель силовой установкой, передаточным механизмом, тормозной системой и т.п., предусмотрена система управления на основе микропроцессора. Для ввода и вывода данных для системы управления предназначен блок управления и отображения.
В отличие от грузовых и легковых автомобилей к конструктивному выполнению сельскохозяйственных рабочих машин предъявляются особые требования в отношении обеспечения долговечности или срока службы. Это обусловлено множеством возможных навесных агрегатов, что приводит к крайне различным ситуациям нагрузок в приводной трансмиссии рабочей машины. Даже для единственного навесного агрегата ситуация нагрузки может резко колебаться в зависимости от конкретных граничных условий. Примером может служить навесной агрегат в виде плуга, который в зависимости от свойств почвы может приводить к самым различным ситуациям нагрузки.
Кроме того, сельскохозяйственная машина, о которой здесь идет речь, как привило, подвергается балластировке со стороны пользователя. В случае ошибочной балластировки на приводных валах ходовых колес могут создаваться необязательные высокие нагрузки от крутящего момента в ущерб ожидаемому сроку службы.
Далее, следует учитывать, что рабочая машина часто бывает оснащена передаточным механизмом с бесступенчато регулируемым передаточным отношением, благодаря чему приводной двигатель рабочей машины может работать на постоянной рабочей точке с заданной предпочтительно максимальной выходной мощностью. При низких скоростях это может приводить к соответствующим высоким нагрузкам от крутящего момента на приводных валах ходовых колес.
Для обеспечения номинального срока службы рабочей машины в указанном смысле требуется, чтобы выдерживался диапазон нагрузок, лежащий в основе параметров машины. Превышение этого диапазона нагрузок может приводить к снижению срока службы, если это превышение не выравнивается посредством соответствующего снижения нагрузки. С учетом указанного выше разнообразия, а также не в последнюю очередь с учетом множества возможных полевых условий, которые также могут приводить к повышенным нагрузкам, выдерживание указанного выше диапазона нагрузок в известной рабочей системе представляет сложную задачу.
Раскрытие изобретения
Задачей настоящего изобретения является оснащение и усовершенствование известной сельскохозяйственной рабочей системы таким образом, чтобы устранить вызываемое нагрузками снижение срока службы.
В соответствии с изобретением решение поставленной задачи достигается в рабочей машине в соответствии с ограничительной частью пункта 1 за счет признаков отличительной части пункта 1 формулы изобретения.
Существенной является изобретательская идея в том, что система управления определяет возникающие в процессе рабочей эксплуатации нагрузки от крутящего момента по меньшей мере для одного компонента приводной трансмиссии, предпочтительно для приводных валов ходовых колес, и на основе определенных ею нагрузок от крутящего момента предоставляет в распоряжение по меньшей мере одну функцию управления. При этом в предпочтительном примере осуществления функция управления служит для устранения и/или предотвращения разрушительной или снижающей срок службы нагрузки компонентов приводной трансмиссии, таких как указанные выше приводные валы ходовых колес.
Идея проверки отдельных компонентов приводной трансмиссии сельскохозяйственной рабочей машины на локальные нагрузки от крутящего момента обеспечивает возможность целенаправленно с помощью техники автоматического управления влиять на ситуацию нагрузки рабочей машины и при соответствующем конструктивном решении целенаправленно гарантировать срок службы рабочей машины.
В принципе, система управления может быть выполнена в виде бортовой системы управления машины и расположена на рабочей машине. Однако может иметь преимущества решение, когда по меньшей мере часть системы управления выполнена в виде дистанционной системы управления, которая связана с бортовой частью системы управления радиосвязью или другими средствами связи (пункт 2 формулы изобретения).
В предпочтительном примере осуществления по пункту 3 формулы изобретения нагрузка от крутящего момента определяется по вызванному крутящими моментами скручиванию соответствующего приводного компонента. В особенно предпочтительном примере осуществления здесь используются уже имеющиеся в рабочей машине датчики вращения системы антиблокировки. Для получения абсолютной величины конкретной нагрузки от крутящего момента вначале производится калибровка при известной нагрузке от крутящего момента, предпочтительно при нагрузке от крутящего момента, идущей от нуля. Затем измерение интересующей нагрузки от крутящего момента производится относительно этого калибровочного измерения, так что результат представляет собой абсолютную величину нагрузки от крутящего момента. В принципе, этот вид определения известен (DE 102006027834 A1). Однако использование этого известного принципа измерений применительно к самоходным сельскохозяйственным рабочим машинам впервые приводит к возможности целенаправленного сохранения срока службы посредством простых мер техники автоматического управления.
Благодаря первой альтернативе по пункту 5 формулы изобретения может в значительной степени предотвращаться поломка компонентов приводной трансмиссии под действием избыточной нагрузки от крутящего момента. При соответствующем выполнении системы управления уже приближение определенной нагрузки от крутящего момента к нагрузке поломки приводит к соответствующей мере техники автоматического управления.
При втором альтернативном решении по пункту 5 формулы изобретения действительный диапазон нагрузок сравнивается с положенным в основу конструктивного выполнения машины расчетным диапазоном нагрузок. В зависимости от результата сравнения система управления предпринимает соответствующие меры автоматического управления. За счет этого, в принципе, возможно достигнуть номинального срока службы рабочей машины «точка в точку», так что обеспечивается оптимальная рабочая эксплуатация без отказов рабочей машины до истечения номинального срока службы.
Предпочтительные примеры осуществления по пунктам 7 и 8 формулы изобретения относятся к ряду ситуаций эксплуатации, которые могут восприниматься и при необходимости компенсироваться средствами автоматического управления на основе определяемых нагрузок от крутящего момента. Двойное использование определяемых нагрузок от крутящего момента, а именно, с одной стороны, для обеспечения номинального срока службы и, с другой стороны, для оптимизации ситуаций эксплуатации, приводит к особенно эффективному по затратам общему решению.
Согласно следующей изобретательской идее по пункту 14 формулы изобретения, которая имеет самостоятельное значение, заявлена как таковая система управления описанной рабочей системы. Как было указано выше, система управления может быть выполнена в виде бортовой системы управления или, во всяком случае частично, в виде дистанционной системы управления.
Краткий перечень чертежей
Далее изобретение будет подробно описано лишь на одном примере осуществления со ссылками на прилагаемые чертежи. На чертежах:
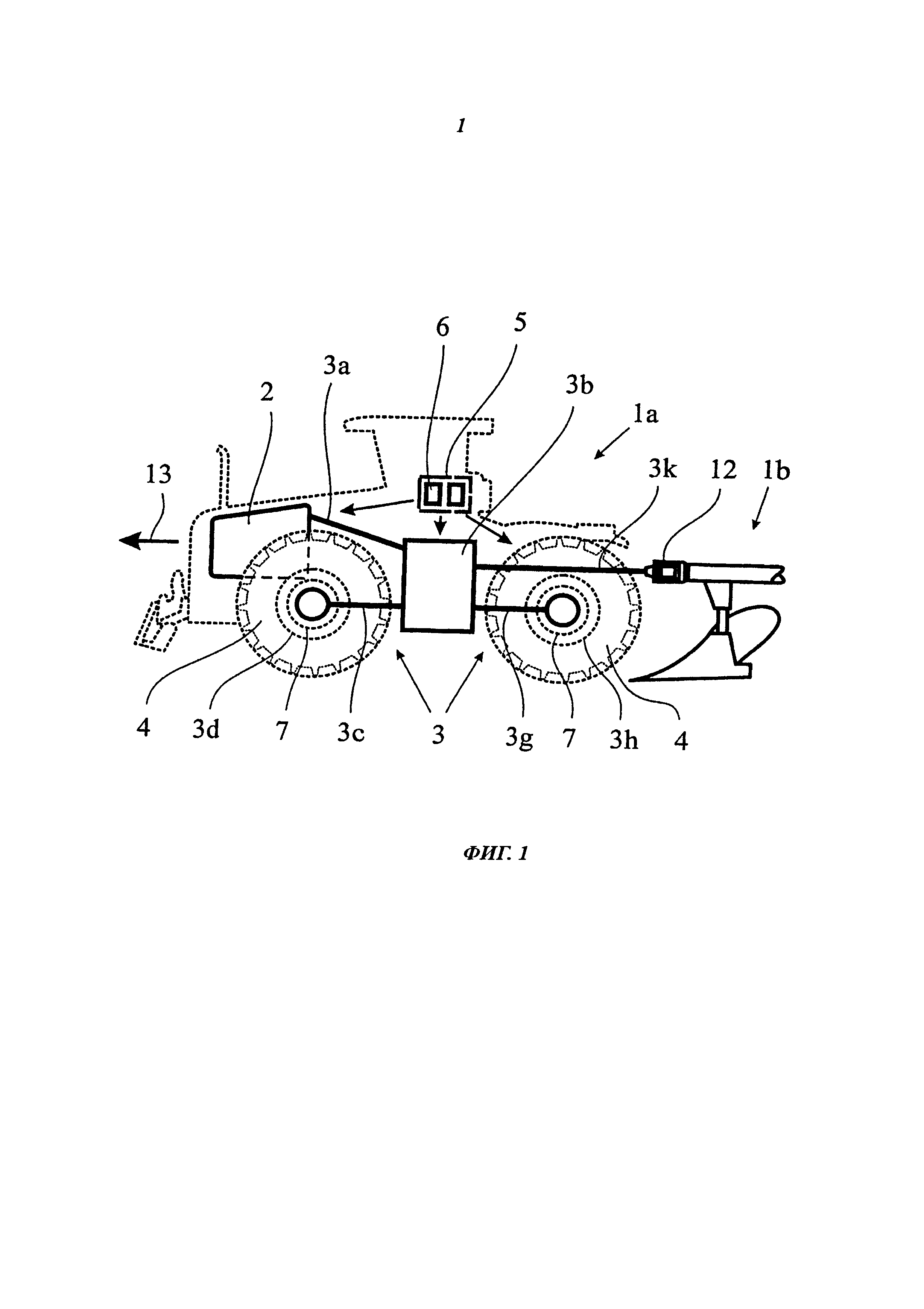
фиг.1 изображает на виде сбоку принципиальную схему существенных компонентов предлагаемой сельскохозяйственной рабочей системы с сельскохозяйственной рабочей машиной, включая навесное орудие, и
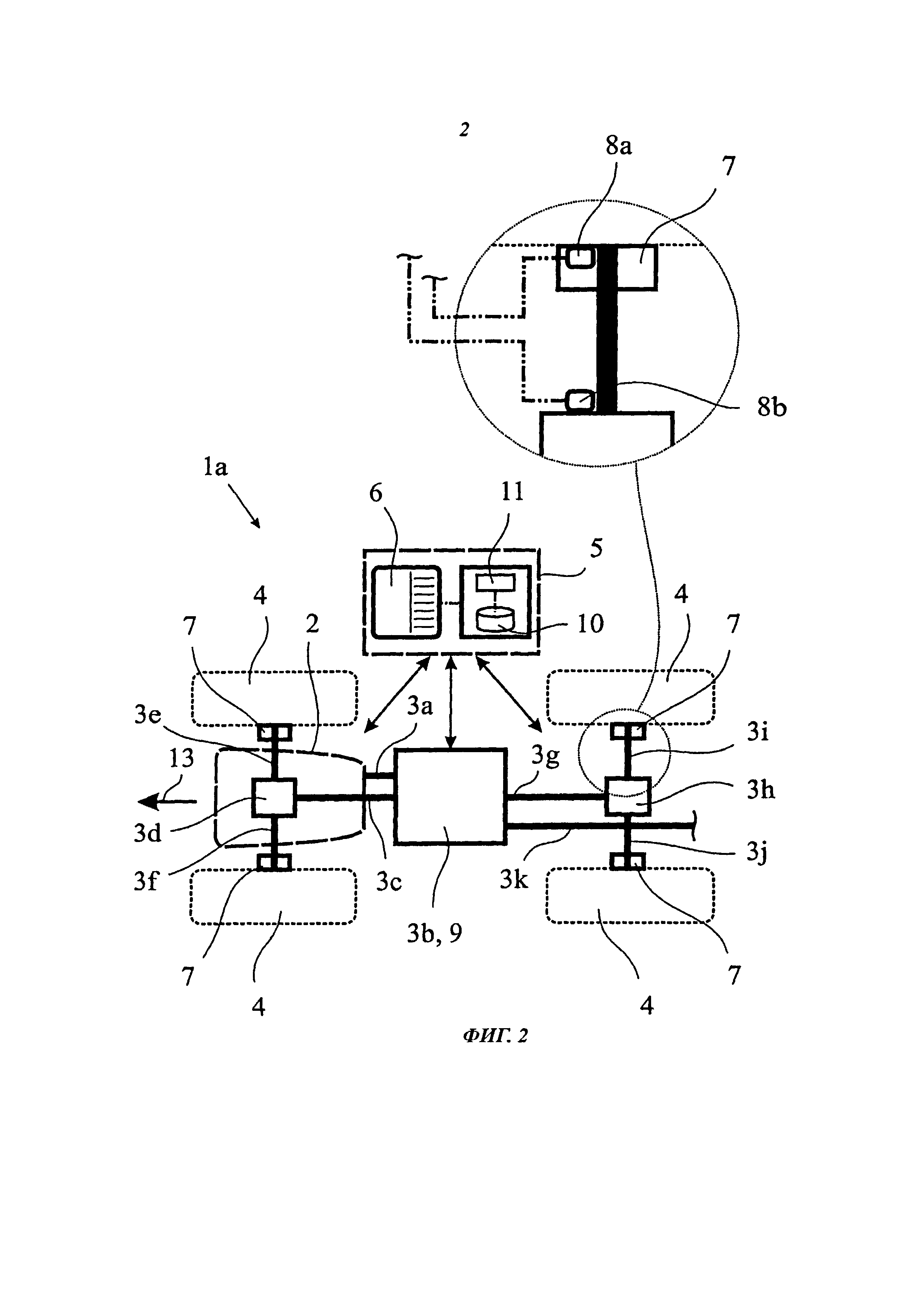
фиг.2 изображает рабочую машину по фиг.1 на виде сверху.
Осуществление изобретения
Для выполнения показанной рабочей машины 1а предлагаемой рабочей системы возможно множество вариантов. Следует упомянуть, что рабочей машиной 1а может быть, например, трактор, автопогрузчик, в частности телескопический погрузчик, а также самоходная уборочная машина и подобные машины.
Рабочая машина 1а может быть оснащена множеством навесных орудий 1b. Навесным орудием 1b помимо прочих может быть плуг (фиг.1), культиватор или борона. Возможны также другие навесные орудия 1b, например сеноворошилки, сеялки и подобные орудия.
Рабочая машина 1а оснащена силовой установкой 2, которая здесь и предпочтительно представляет собой дизельный двигатель. Силовая установка 2 обычным образом приводит через приводную трансмиссию 3 ходовые колеса 4, здесь и предпочтительно в количестве четырех колес.
Предпочтительно рабочая машина 1а является полноприводной с приводом или возможностью привода всех четырех ходовых колес 4. В показанном и предпочтительном примере выполнения ходовые колеса 4 имеют одинаковый номинальный диаметр. Однако в принципе ходовые колеса 4 могут иметь также различные диаметры.
Силовая установка 2 кинематически соединена приводным валом 3а с коробкой скоростей 3b, предпочтительно бесступенчатой, которая передает приводную мощность через приводной вал 3c и дифференциал 3d на два приводных вала 3е и 3f передних ходовых колес 4 и через приводной вал 3g и дифференциал 3n на приводные валы 3i и 3j задних ходовых колес 4. Далее, предусмотрен вал 3k отбора мощности, который также отходит от коробки скоростей 3b и может служить для привода соответствующего навесного орудия 1b.
Для управления существенными компонентами привода предусмотрены система 5 управления и предназначенный для системы 5 управления блок 6 управления и отображения. Под подлежащими управлению существенными компонентами привода здесь имеются в виду уже упомянутая силовая установка 2, коробка 3b скоростей, два дифференциала 3d, 3n и другие существенные для привода компоненты, такие как тормозная система 7 и подобные компоненты.
Существенно то, что в процессе рабочей эксплуатации система 5 управления определяет нагрузку от крутящего момента по меньшей мере для одного компонента 3a-3k приводной трансмиссии, в частности для приводных валов 3e, 3f, 3i, 3j ходовых колес 4, и на основе определенных ею нагрузок от крутящего момента предоставляет в распоряжение по меньшей мере одну функцию управления. Здесь и предпочтительно эта функция управления направлена на устранение и/или предотвращение нагрузки компонентов приводной трансмиссии, которая приводит к разрушению или к снижению срока службы компонентов приводной трансмиссии.
Здесь и предпочтительно система 5 управления является бортовой системой управления машины, которая полностью встроена в рабочую машину 1а. Однако может быть целесообразно выполнение по меньшей мере части системы 5 управления в виде системы дистанционного управления, расположенной отдельно от рабочей машины 1а. Система дистанционного управления может быть расположена, например, на удалении от рабочей машины 1а в административном здании эксплуатационного предприятия или производителя машин и связана с бортовой частью системы 5 управления радиосвязью или мобильной телекоммуникационной сетью UMTS (Universal Mobile Telecommunication System - универсальная мобильная телекоммуникационная сеть) или другой связью.
В принципе определение нагрузок от крутящего момента может быть предусмотрено непрерывно в ходе всего рабочего процесса рабочей машины 1а. За счет этого обеспечивается возможность реагирования на каждую нагрузку от крутящего момента, которая представляет чрезмерную нагрузку приводной трансмиссии 3. Однако, в принципе, возможно определение нагрузок от крутящего момента с заданными промежутками времени или в результате предварительно определенного события, например действия оператора.
В показанном и предпочтительном примере осуществления производится мониторинг нагрузок от крутящего момента исключительно для приводных валов 3e, 3f, 3i, 3j ходовых колес 4. Однако дополнительно может быть предусмотрен мониторинг также вала 3k отбора мощности или приводных валов 3а, 3c и 3g.
В особенно предпочтительном примере выполнения определение нагрузки от крутящего момента одного из компонентов 3e, 3f, 3i, 3j приводной трансмиссии осуществляется на основе скручивания соответствующего компонента 3e, 3f, 3i, 3j приводной трансмиссии. Здесь и предпочтительно определение вызванного крутящим моментом скручивания производится при использовании отстоящих друг от друга датчиков 8а, 8b скручивания. Такими датчиками 8а, 8b скручивания могут быть, например, датчики угла поворота или датчики числа оборотов, причем в последнем случае предпочтительно необходима такая мера, как измерение времени для определения разности углов между двумя датчиками угла поворота. На фиг.2 датчиком 8а угла является датчик вращения системы антиблокировки, что дает экономичную конструкцию. Следует отметить, что на фиг.2 показаны только датчики 8а, 8b, предусмотренные для определения нагрузки от крутящего момента для ходового колеса 4, показанного справа сверху. В данном примере выполнения все приводные валы 3e, 3f, 3i, 3j ходовых колес 4 снабжены парой таких датчиков вращения.
При рабочей эксплуатации рабочей машины 1а для нее предусмотрена конфигурация привода. Она охватывает все характерные параметры машины, технические данные управления и механические параметры, которые оказывают влияние на нагрузки от крутящего момента в приводной трансмиссии 3 при рабочей эксплуатации. Таким образом, конфигурация привода содержит, например, управление силовой установкой 2 в отношении регулирования мощности, управление коробкой скоростей, балластировку и т.д.
Предпочтительно система 5 управления на основе определенных ею нагрузок от крутящего момента определяет оценку и/или оптимизацию конфигурации привода в отношении различных целевых задач, таких как низкая вероятность поломки, номинальный срок службы и/или высокая производительность орудий. Далее, предпочтительно система 5 управления выдает оператору указания для оценки и/или оптимизации в отношении по меньшей мере одного целевого задания. Альтернативно или дополнительно система 5 управления сама предпринимает определенную оптимизацию конфигурации привода посредством соответствующего управления, в особенности компонентами двигателя, если в распоряжении имеются соответствующие функции автоматики, такие как автоматическая балластировка или другие.
Определение указанной выше оценки или оптимизации предпочтительно производится также в зависимости от вида используемого навесного орудия 1b. Так, например, для этого в памяти данных системы 5 управления записаны существенные параметры известных навесных орудий 1b.
Как было указано выше, показанная приводная трансмиссия 3 содержит коробку 3b скоростей, которая в частичной приводной трансмиссии выполнена в виде бесступенчатого вариатора 9 скоростей. Передаточное отношение бесступенчатого вариатора 9 скоростей может бесступенчато регулироваться системой 5 управления. В одной конфигурации привода система 5 управления настраивает силовую установку 2 на постоянную выходную мощность, которая может быть предпочтительно максимальной выходной мощностью. За счет этого обеспечивается постоянная работа силовой установки 2 на оптимальной точке эксплуатации. Изменение скорости движения осуществляется путем переменной настройки передаточного отношения бесступенчатого вариатора 9 скоростей, которое, как правило, зависит от задания оператором, в особенности от привода оператором в действие педали акселератора.
Система 5 управления показана на чертеже в виде центральной системы 5 управления, которая в любом случае содержит память 10 данных и микропроцессор 11. Однако система 5 управления может быть, по меньшей мере, частично децентрализована с распределением, указанным выше. Обозначение ее позицией следует понимать только как указание на структуру управления.
Так, например, для того, чтобы предотвратить поломку одного из приводных валов 3e, 3f, 3i, 3j, в предпочтительном примере осуществления система 5 управления определяет приближение ситуации нагрузки к ситуации поломки. Предлагается, что в памяти 10 данных системы 5 управления записаны нагрузки поломки для различных компонентов 3e, 3f, 3i, 3j приводной трансмиссии, причем система 5 управления сравнивает установленные нагрузки от крутящего момента с нагрузками поломки и на основе сравнения выполняет оценку и/или оптимизацию конфигурации привода в отношении целевых параметров меньшей вероятности поломки. В простейшем случае здесь возможно снижение выходной мощности силовой установки 2. Другая возможность состоит в том, чтобы изменить распределение крутящих моментов между валами 3c и 3g посредством соответствующего управления коробкой 3b скоростей. Однако в принципе возможна простая выдача указания оператору, так что он сам может предпринять необходимые меры.
В особенно предпочтительном примере осуществления, когда на переднем плане стоит сохранение номинального срока службы рабочей машины 1а, предлагается, чтобы в памяти 10 данных системы 5 управления был записан расчетный диапазон нагрузок. Под расчетным диапазоном нагрузок имеется в виду диапазон нагрузок, в основе которого лежит расчет в отношении номинального срока службы рабочей машины 1а. Определение такого диапазона нагрузок дано в публикации «Определение зависимых от процесса диапазонов нагрузок гидростатической приводной трансмиссии хода на примере телескопической вышки», Andreas Huber, Karlsruher Schriftenreihe Fahrzeugsustemtechnik, Band 2, 2010, ISBN 978-3-86644-564-2.
Представляет интерес, что система 5 управления из определенной ею нагрузки от крутящего момента определяет действительный диапазон нагрузок для приводной трансмиссии 3, здесь для компонентов 3e, 3f, 3i, 3j приводной трансмиссии. Система 5 управления сравнивает действительный диапазон нагрузок с расчетным диапазоном нагрузок, предпочтительно непрерывно. На основе сравнения система 5 управления вырабатывает оценку и/или оптимизацию в отношении заданной цели номинального срока службы. В особенно предпочтительном примере осуществления система 5 управления предпринимает определенную ею оптимизацию и на основе сравнения осуществляет управление существенными для привода компонентами для соответствующего изменения конфигурации привода. Альтернативно или дополнительно может быть также предусмотрено, что оператору выдаются указания в отношении результатов сравнения.
В особенности в отношении контроля обеспечения гарантий в варианте решения предлагается, чтобы в памяти 10 данных системы 5 управления был, по меньшей мере, частично постоянно записан действительный диапазон нагрузок, в частности, при превышении им расчетного диапазона нагрузок. При этом условии предпочтительно система 5 управления при превышении действительным диапазоном нагрузок расчетного диапазона нагрузок разрешает продолжать эксплуатацию только после подтверждения оператора. Выполняемое таким образом подтверждение предпочтительно также постоянно записано в памяти 10 данных.
Пока действительный диапазон нагрузок постоянно находится ниже расчетного диапазона нагрузок, можно рассчитывать на сохранение номинального срока службы, поскольку она базируется на расчетном диапазоне нагрузок. Однако когда действительный диапазон нагрузок лежит выше расчетного диапазона нагрузок, ожидаемый срок службы снижается, так что требуются соответствующие меры противодействия. Одной возможной мерой противодействия является снижение выходной мощности силовой установки 2. Другая мера состоит в оптимизации балластировки рабочей машины 1а.
Как было указано выше, конфигурация привода охватывает балластировку рабочей машины 1а, посредством которой нагрузка веса ходовых колес 4 может быть изменена с помощью дополнительных грузов. Соответственно, оптимизация конфигурации привода относится также к балластировке. В принципе, возможно, что система 5 управления из определенных ею нагрузок от крутящего момента определяет изменение балластировки для устранения и/или предотвращения разрушительной или снижающей срок службы нагрузки компонентов 3e, 3f, 3i, 3j приводной трансмиссии. Так, например, балансировка неправильна, когда на передние ходовые колеса 4 приходится особенно высокая нагрузка, тогда как задние ходовые колеса 4 показывают слишком низкую нагрузку вплоть до пробуксовки. В таком случае необходимо снизить переднюю балластировку и повысить заднюю балластировку. В принципе система 5 управления может выполнять определенную ею балластировку с помощью автоматической системы балластировки, которая предпочтительно является приводной системой. Альтернативно или дополнительно может быть предусмотрено, что система 5 управления выдает оператору указание по изменению балластировки. В этом случае оператор может обычным образом изменить балластировку вручную.
Другой предпочтительный вариант оптимизации распределения крутящих моментов заключается в оптимизации высоты точки 12 передачи тяги между рабочей машиной 1а и навесным орудием 1b, если эта точка 12 передачи тяги является регулируемой по высоте. Таким образом, высота точки передачи тяги также относится к конфигурации привода и подлежит оптимизации. За счет регулировки высоты точки передачи тяги может регулироваться распределение крутящих моментов между передней и задней ходовыми осями без негативного влияния на рабочую эксплуатацию. Согласно изобретению для устранения и/или предотвращения разрушительной или снижающей срок службы нагрузки компонентов 3e, 3f, 3i, 3j система 5 управления из определенных ею нагрузок от крутящего момента определяет изменение высоты точки 12 передачи тяги, причем изменение высоты в принципе может осуществляться моторным приводом с управлением системой 5 управления.
Здесь и предпочтительно система 5 управления выдает оператору указание относительно определенного ею изменения высоты точки 12 передачи тяги, на основании которой оператор может предпринять ручную настройку высоты точки передачи тяги.
И наконец, можно также добиться распределения нагрузок путем изменения давления в шинах ходовых колес 4, которое также входит в состав конфигурации привода и, соответственно, подлежит оптимизации в указанном выше смысле. Предпочтительно система 5 управления из определенных ею нагрузок от крутящего момента определяет изменение давления в шинах, которое дает предварительно заданное распределение нагрузки для приводных валов 3e, 3f, 3i, 3j, причем в варианте решения система 5 управления выдает оператору указание по определенному ею изменению давления в шинах. Альтернативно или дополнительно может быть предусмотрено, что система 5 управления предпринимает изменение давления в шинах с помощью системы контроля шин с компрессором или подобным компонентом.
Однако определяемые в соответствии с изобретением нагрузки от крутящего момента могут использоваться не только для предотвращения разрушения или сохранения номинального срока службы рабочей машины 1а. Эти определяемые в соответствии с изобретением нагрузки от крутящего момента служат также для определения предварительно заданных ситуаций эксплуатации, параметры которых согласно изобретению записаны в памяти 10 данных системы 5 управления. Предпочтительно такими ситуациями эксплуатации являются опасные ситуации эксплуатации. Предпочтительно система 5 управления выдает оператору указание относительно определенной ею ситуации эксплуатации и/или она сама противодействует такой ситуации эксплуатации, в частности, посредством изменения конфигурации привода.
В качестве примера ситуацией эксплуатации является так называемая «ситуация опрокидывания», при которой рабочая машина 1а наклоняется вбок относительно продольной оси 13 машины. Эта ситуация опрокидывания выражается посредством односторонней относительно продольной оси 13 машины нагрузки от крутящего момента на приводных валах 3e, 3f, 3i, 3j, причем система 5 управления также выдает оператору указание относительно опрокидывания. Альтернативно или дополнительно может быть предусмотрено, что система 5 управления вмешивается в рулевое управление или подобную систему для снижения опасности опрокидывания.
Другая ситуация эксплуатации называется «биением мощности». Она определяется системой 5 управления как циклическое повышение нагрузки от крутящего момента на приводных валах 3e, 3f, 3i, 3j ходовых колес с предварительно определенной амплитудой колебаний. На основе определения посредством технических средств управления здесь и предпочтительно предпринимаются противоциклические меры противодействия этой ситуации эксплуатации. При этом может идти речь о противоциклическом изменении выходной мощности силовой установки 2 или о соответствующем противоциклическом торможении с помощью тормозной системы 7. Другая предпочтительная возможность состоит в том, что для устранения этого состояния система 5 управления изменяет высоту точки передачи тяги между рабочей машиной и навесным орудием 1b.
Ситуация эксплуатации «ситуация сдвига» имеет особое значение для движения по косогору. Здесь из-за вызванного гравитацией сдвига может наступать пробуксовка, незаметная для оператора. Путем определяемой в соответствии с изобретением нагрузки от крутящего момента эта ситуация эксплуатации может легко распознаваться и оператору может выдаваться соответствующее указание.
Другая ситуация эксплуатации обозначается как «ситуация заклинивания», при которой плуг или подобное орудие заклинивается в земле. Связанная с этим нагрузка от крутящего момента, которая колеблется в пределах диапазона, записанного в памяти 10 данных, воспринимается системой 5 управления как «ситуация заклинивания». Предпочтительно на блок 6 управления и отображения выдается соответствующее указание для оператора. Альтернативно или дополнительно для устранения этого состояния система 5 управления может, например, изменить рабочую глубину навесного орудия, - здесь плуга или подобного орудия.
Особенно выгодное преимущество использования определяемых в соответствии с изобретением нагрузок от крутящего момента на приводных валах 3e, 3f, 3i, 3j ходовых колес 4 проявляется, когда рабочая машина 1а эксплуатируется по меньшей мере с одним, не показанным здесь прицепом. Это относится прежде всего к предотвращению излома состава из машины с прицепом, когда по меньшей мере один прицеп при движении по косогору оказывает на рабочую машину 1а воздействие сдвига. Эксплуатация со сдвигом определяется системой 5 управления, как это пояснялось выше. На основе этого определения предусмотрено, что система 5 управления во избежание излома состава из машины с прицепом управляет соответствующим торможением по меньшей мере одного прицепа.
Определяемые в соответствии с изобретением нагрузки от крутящего момента могут использоваться также для проверки выходной мощности силовой установки 2. Предпочтительно в памяти 10 данных системы 5 управления записаны данные заданной мощности силовой установки 2, при этом на основе определенных нагрузок от крутящего момента определяется действительная выходная мощность силовой установки 2 и сравнивается с заданными данными мощности. В результате система 5 управления выдает оператору указание, относящееся к конкретному отклонению. Альтернативно или дополнительно может быть предусмотрено, что конкретное отклонение записано в памяти. При этом представляют интерес не только отклонения вниз, но также отклонения вверх, которые основаны на мерах по повышению мощности со стороны пользователя. Такие повышающие мощность меры, как правило, ограничивают гарантийные условия, так что запись выявленных отклонений может представлять интерес.
На основе определения нагрузок от крутящего момента в соответствии с изобретением может также регулироваться распределение крутящих моментов между отдельными приводными валами 3e, 3f, 3i, 3j. При этом особенно простым путем может достигаться заданное распределение крутящих моментов на отдельных приводных валах 3e, 3f, 3i, 3j. В особенно предпочтительном примере осуществления подлежащее настройке заданное распределение крутящих моментов может задаваться оператором через блок 6 управления и отображения.
Определяемые в соответствии с изобретением нагрузки от крутящего момента могут использоваться также для учета с получением преимуществ при работе в тормозном режиме. Предпочтительно система 5 управления управляет существенными для привода компонентами таким образом, что на приводные валы 3e 3f, 3i, 3j ходовых колес 4 не действует никакая нагрузка от крутящего момента или тормозная нагрузка от крутящего момента. Таким путем обеспечивается то, что силовая установка 2 не работает в противодействие тормозной системе 7.
Предпочтительно рабочая машина 1а снащена по меньшей мере одним переключаемым посредством системы 5 управления механизмом блокировки дифференциала 3d, 3n, причем система 5 управления предпринимает блокировку или разблокировку механизма 3d, 3n блокировки дифференциала исключительно в состоянии, в котором это допускают определенные ею в соответствии с изобретением нагрузки от крутящего момента в обеих относящихся к механизму блокировки дифференциала частичных ветвях 3e, 3f, 3i, 3j трансмиссии. Предпочтительно это тот случай, когда определенные в соответствии с изобретением нагрузки от крутящего момента в обеих относящихся к механизму 3d, 3h блокировки дифференциала частичных ветвях 3e, 3f, 3i, 3j трансмиссии по существу одинаковы.
Представляет интерес оснащение системы 5 управления функцией счетчика продолжительности работы для приводной трансмиссии 3 или для отдельных компонентов приводной трансмиссии. При этом предпочтительно предусмотрено, что помимо продолжительности работы записывается также определенная нагрузка от крутящего момента. В особенно предпочтительном примере осуществления системой 5 управления задается скорость учета продолжительности работы в зависимости от нагрузки. Здесь возможны различные варианты. Существенно то, чтобы оценка продолжительности работы производилась в известной степени в зависимости от нагрузки. Это приводит к особенно эффективной оценке продолжительности работы.
Согласно следующей изобретательской идее, которая имеет самостоятельное значение, заявлена как таковая сама система 5 управления описанной рабочей системы. При этом делается ссылка на все примеры осуществления рабочей системы, которые пригодны для описания системы 5 управления.
Реферат
Изобретение относится к области сельскохозяйственного машиностроения, в частности к рабочей системе с самоходной сельскохозяйственной рабочей машиной. Рабочая машина может быть оснащена по меньшей мере одним навесным орудием, в частности почвообрабатывающим орудием, таким как плуг, культиватор или борона. Рабочая машина оснащена силовой установкой, которая через приводную трансмиссию воздействует на ходовые колеса, системой управления и предназначенным для нее блоком управления и отображения. Система управления определяет возникающие в процессе рабочей эксплуатации нагрузки от крутящего момента по меньшей мере для одного компонента приводной трансмиссии, в частности для приводных валов ходовых колес, и на основе определенных ею нагрузок от крутящего момента предоставляет в распоряжение по меньшей мере одну функцию управления. При рабочей эксплуатации рабочей машине назначена конфигурация привода, и нагрузки от крутящего момента в приводной трансмиссии подвержены влиянию конфигурации привода. Система управления выполнена с возможностью, на основе установленных нагрузок от крутящего момента, предпочтительно в ходе рабочей эксплуатации, определения оценки и/или оптимизации конфигурации привода в отношении различных целевых заданий, таких как номинальный срок службы и/или высокая производительность навесных орудий, и/или выдачи оператору указаний для оценки и/или оптимизации в отношении по меньшей мере одного целевого задания, и/или проведения установленной оптимизации конфигурации привода. Таким конструктивным решением обеспечивается повышение срока службы компонентов приводной трансмиссии рабочей машины. 2 н. и 12 з.п. ф-лы, 2 ил.
Комментарии