Способ эксплуатации механической установки со сплошным валом - RU2658724C1
Код документа: RU2658724C1
Чертежи

Описание
Изобретение относится к способу эксплуатации механической установки со сплошным валом.
Механическая установка, к примеру, силовая установки для генерирования тока, имеет электрический генератор и, по меньшей мере, одну турбину, причем турбина приводит в действие генератор. Для этого турбина и генератор располагаются на общем сплошном валу. Возможно предусмотреть на сплошном валу муфты, чтобы подсоединить отдельные турбины к сплошному валу или отсоединить их от сплошного вала.
Генератор в процессе работы силовой установки подает ток в электросеть. Неполадки в электросети могут приводить к тому, что через генератор возбуждаются крутильные колебания сплошного вала. В самом неблагоприятном случае может иметь место возбуждение одной из собственных частот сплошного вала. Возбуждение на собственной частоте приводит к высокой торсионной нагрузке сплошного вала по напряжению, что может приводить к сокращению срока его службы или к образованию трещин вследствие внутренних напряжений. Ожидается, что помехи в электросети будут иметь место в будущем все чаще, так как в рамках реализации системы постоянного энергоснабжения структуры электросети изменяются.
В традиционном варианте измеряется нагрузка на сплошной вал, когда в нескольких аксиальных положениях сплошного вала с высокой разрешающей способностью измеряется его частота вращения. На основании разности частоты вращения в различных аксиальных положениях затем делают заключение о нагрузке на сплошной вал. Однако, используемая в данном способе измерительная техника и соответствующая система обработки данных являются дорогостоящими. В альтернативном варианте возможно измерять колебания в электрическом энергоотводе силовой установки. Однако, для случая, когда в энергоотводе идентифицируются потенциально возбуждаемые колебания, не могут быть сделаны никакие выводы относительно фактической нагрузки сплошного вала.
В документе DE 40 32 299 A1 раскрыт способ контроля выполненного с возможностью вращения конструктивного элемента, при котором в зависимости от времени измеряется колебательное перемещение конструктивного элемента в радиальном направлении относительно конструктивного элемента и угловое положение конструктивного элемента. В EP 0 585 623 А2 раскрыт способ раннего распознавания трещины во вращающемся валу. В документе DE 27 34 396 А1 описан способ контроля крутильных колебаний валов, при котором измеряется мгновенная мощность генератора.
Задачей изобретения является создание способа эксплуатации механической установки со сплошным валом, при котором нагрузки на сплошной вал могут быть легко определены посредством крутильных колебаний.
Способ в соответствии с изобретением для эксплуатации имеющей сплошной вал механической установки имеет следующие этапы: а) определение расчетным путем собственной частоты, по меньшей мере, одного режима крутильных колебаний сплошного вала и определение расчетным путем возникающих во время периода колебаний режима крутильных колебаний механических напряжений сплошного вала, б) определение, соответственно, соотношения для каждого режима крутильных колебаний между первой амплитудой напряжения, которая возникает в положении сплошного вала, котором подвержено потерям напряжения, и второй амплитудой напряжения, которая возникает в точке замера сплошного вала, на основании определенных расчетным путем для соответствующего режима крутильных колебаний напряжений, в) установление максимальной первой амплитуды напряжения для положения, г) определение соответствующей максимальной первой амплитуде напряжения максимальной второй амплитуды напряжения для точки замера на основании соотношения, д) измерение напряжения сплошного вала во время вращения сплошного вала в точке замера, в зависимости от времени, е) определение амплитуды напряжения при каждой собственной частоте на основании измеренного напряжения, ж) выдача сигнала в случае, когда определенная на основании измеренных напряжений амплитуда напряжения при одной из собственных частот достигает максимальной второй амплитуды напряжения.
Посредством определения соотношений между возникающими в положении и в точке замера амплитудами напряжения на основании определенных расчетным путем напряжений могут быть в предпочтительном варианте определены амплитуды напряжения в точках замера сплошного вала, которые недоступны для измерения. Для определения амплитуд напряжения в положении достаточно одной единственной точки замера на сплошном валу, причем точка замера может быть выбрана в любом месте. Благодаря этому, способ может быть осуществлен сравнительно просто. За счет того, что определяется, соответственно, соотношение для каждого режима колебаний, амплитуды напряжения в положении могут быть определены в предпочтительном варианте с высокой точностью.
В ответ на сигнал могут приниматься меры для предотвращения крутильных колебаний сплошного вала. Если под механической установкой понимается силовая установка для питания сети током, то может быть предпринята, к примеру, десинхронизация между возбуждениями из электросети и крутильными колебаниями сплошного вала. Это может быть осуществлено, к примеру, посредством того, что за счет отсоединения турбины или большого количества турбин от сплошного вала его собственные частоты изменяются. Также возможно отсоединить силовую установку от электросети посредством размыкания электрических проводов.
В предпочтительном варианте на этапе д) напряжение измеряется посредством магнитострикционного датчика и/или посредством тензорезистора, причем измеренные посредством тензорезистора напряжения передаются посредством телеметрии. Магнитострикционный датчик создает посредством передающей катушки высокочастотное магнитное поле и пронизывает поверхность сплошного вала этим магнитным полем. Магнитострикционный датчик имеет одну или несколько приемных катушек, которые образуют с передающей катушкой магнитную цепь и для определения крутильных колебаний расположены особым образом. Посредством особого расположения передающей катушки и приемных катушек может быть определена магнитная восприимчивость на поверхности сплошного вала. Так как, ввиду эффекта Виллари, магнитная восприимчивость корпуса зависит от его механического напряжения, то и обнаруженный приемными катушками сигнал зависит от механического напряжения поверхности сплошного вала. Магнитострикционный датчик выдает аналоговый исходный сигнал, который пропорционален крутильному напряжению сплошного вала. За счет пропорциональности исходного сигнала и крутильного напряжения обработка данных в предпочтительном варианте не требует большого объема вычислений, благодаря чему способ может быть осуществлен просто и быстро. Как магнитострикционный датчик, так и тензорезистор, определяют напряжение сплошного вала непосредственным образом, благодаря чему способ также может быть осуществлен просто.
Предпочтительным является, если на этапе е) измеренные на этапе д) напряжения отфильтровываются посредством полосового фильтра, который может пропускать диапазон частот вокруг собственной частоты и/или осуществляется преобразование Фурье, в частности, быстрое преобразование Фурье, измеренных на этапе д) напряжений. Таким образом, амплитуды напряжения различных режимов крутильных колебаний в предпочтительном варианте могут быть определены простым способом. В случае, когда используется полосовой фильтр на этапе ж) сигнал может быть выдан уже через короткое время после достижения максимальной второй амплитуды напряжения. В случае, когда используется преобразование Фурье или быстрое преобразование Фурье, выдача сигнала осуществляется после окончания расчета.
Предпочтительным является, если на этапе д) напряжение измеряется в большом количестве расположенных в различных аксиальных положениях сплошного вала точек замера. В данном случае посредством среднего арифметического определенных в большом количестве точек замера собственных частот можно добиться высокой точности измерения собственных частот. К тому же, может случиться, что одна из точек замера совпадает с узлом колебаний одного из режимов крутильных колебаний, вследствие чего за счет точек замера режим крутильных колебаний не был бы виден. За счет того, что предусмотрено большое количество точек замера, очень мала вероятность того, что для одного режима крутильных колебаний все узлы колебаний буду располагаться в точках замера. Таким образом, с высокой вероятностью могут быть определены все актуальные режимы крутильных колебаний.
На этапе е) в предпочтительном варианте для выбранного режима крутильных колебаний привлекается лишь та точка замера, которая для выбранного режима крутильных колебаний имеет максимальное определенное расчетным путем на этапе a) механическое напряжение. Благодаря этому, в предпочтительном варианте при определении амплитуд напряжения имеет место значительное соотношение сигнал / шум. Предпочтительным является, если на этапе е) осуществляется соотнесение амплитуд напряжения к одной из собственных частот, в ходе которого формируется экспериментальное соотношение определенных на этапе е) амплитуд напряжения и/или фаз колебаний в большом количестве точек замера, формируется расчетное соотношение определенных расчетным путем амплитуд напряжения и/или фаз колебаний в большом количестве точек замера, и производится сравнение экспериментального соотношения с расчетным соотношением. Посредством сравнения экспериментального соотношения с расчетным соотношением режимы крутильных колебаний, в которых осуществляет колебательные движения сплошной вал, могут быть в предпочтительном варианте определены правильно с высокой вероятностью.
Предпочтительным является, если определенные расчетным путем на этапе a) собственные частоты либо меньше, либо равны 2,5-кратному значению колебательной частоты сплошного вала, или в случае, когда механическая установка является силовой установкой для генерирования тока и частота сети выше колебательной частоты, меньше или равны 2,5-кратному значению частоты сети. Результатом этих собственных частот являются особенно сильные нагрузки по напряжению на сплошной вал, так что контроль этих частот является особенно предпочтительным. На этапе a) в предпочтительном варианте при определении расчетным путем собственной частоты и механических напряжений принимается в расчет нагрузка в результате действия центробежных сил, которая воздействует на сплошной вал в процессе работы механической установки. Таким образом, первые амплитуды напряжения могут быть определены с высокой точностью. Определенное на этапе б) соотношение между первой амплитудой напряжения и второй амплитудой напряжения в предпочтительном варианте представляет собой пропорциональную зависимость.
На этапе в) в предпочтительном варианте для положения устанавливается дополнительная третья максимальная амплитуда напряжения, которая выше первой максимальной амплитуды напряжения, на этапе г) соответствующая максимальной третьей амплитуде напряжений максимальная четвертая амплитуда напряжения для точки замера определяется на основании соотношения и на этапе ж) выдается стоп-сигнал в том случае, когда определенная на этапе е) амплитуда напряжения у собственной частоты достигает максимальной четвертой амплитуды напряжения, причем стоп-сигнал инициирует выключение механической установки. Таким образом, в предпочтительном варианте слишком высокая нагрузка по напряжению на сплошной вал может быть автоматически блокирована.
В предпочтительном варианте способ имеет этап: г1) грубой калибровки магнитострикционного датчика и/или тензорезистора на валу, на который со стороны испытательной машины подается определенное напряжение. Предпочтительным является, если механическая установка имеет генератор, а способ осуществляется с этапом: г2) чистой калибровки магнитострикционного датчика и/или тензорезистора при вращении сплошного вала с привлечением определенного в точке замера напряжения, которое определяется с привлечением выдаваемой генератором мощности. На основании выдаваемой генератором мощности можно сделать заключение о крутящем моменте, который генератор передает на сплошной вал. На основании крутящего момента затем можно сделать заключение о возникающих в сплошном валу напряжениях. Таким образом, в предпочтительном варианте можно осуществлять калибровку на фактическом сплошном валу и в процессе работы механической установки.
Предпочтительным является, если на этапе б) определяются соотношения для большого количества положений сплошного вала, которые подвержены потерям напряжения, на этапе в) для каждого положения устанавливается соответствующая максимальная первая амплитуда напряжения, на этапе г) для каждого из положений определяется соответствующая максимальная вторая амплитуда напряжения и на этапе ж) выдается сигнал в случае, если достигается одна из максимальных вторых амплитуд напряжения. Таким образом, в предпочтительном варианте большое количество критических точек сплошного вала может быть проконтролировано посредством лишь одной единственной точки замера. Максимальные первые амплитуды напряжения в различных положениях могут быть при этом равны или отличаться друг от друга. Также возможно для большого количества положений установить третьи максимальные амплитуда напряжения, причем и они могут быть равны или отличаться друг от друга.
Предпочтительным является, если точка замера на сплошном валу расположена в зоне свободно лежащего участка сплошного вала, в зоне доступного для измерительной техники участка карданного вала и/или в зоне определенного расчетным путем максимума напряжения. Положения находятся в предпочтительном варианте в зоне опор, муфт и/или хвостов лопаток. При этом речь идет в предпочтительном варианте о положениях, которые особенно подвержены потерям напряжения. В предпочтительном варианте на этапе а) собственные частоты и напряжения определяются расчетным путем методом конечных элементов.
Далее способ в соответствии с изобретением поясняется более детально на основании приложенного схематичного чертежа, на котором представлено:
фиг. 1 - вид сбоку сплошного вала с четырьмя определенными расчетным путем режимами кручения,
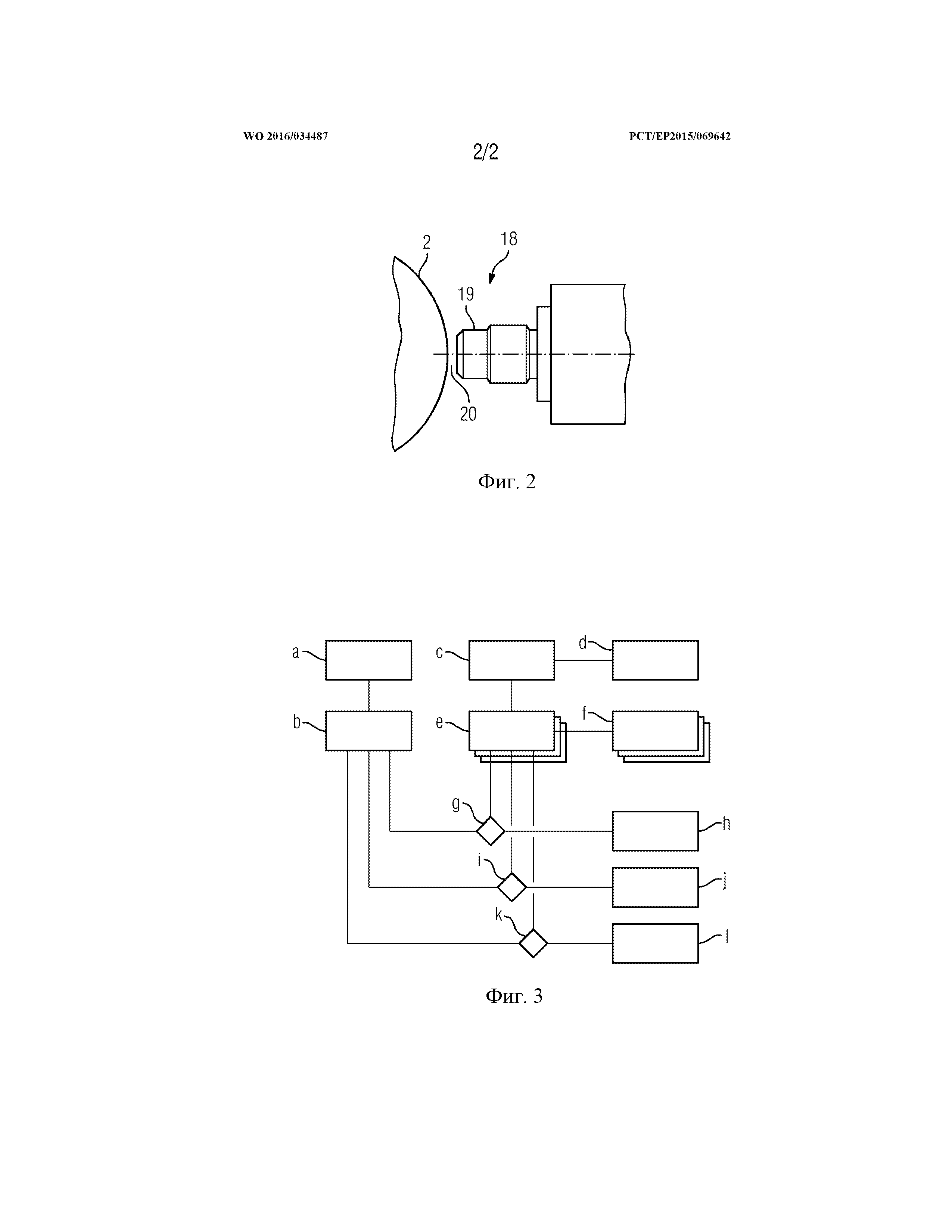
фиг. 2 - поперечное сечение сплошного вала с магнитострикционным датчиком и
фиг. 3 - блок-схема технологического процесса способа в качестве примера.
Как видно из фиг. 1, механическая установка 1 имеет генератор 3 и, по меньшей мере, одну турбину, причем генератор 3 и турбина расположены на общем сплошном валу 2. Механическая установка 1 может также иметь большое количество сплошных валов, причем способ осуществляется с каждым из сплошных валов. Механическая установка в соответствии с фиг. 1 имеет первую турбину 4, вторую турбину 5, третью турбину 6 и четвертую турбину 21, которые расположены на аксиальной стороне генератора 3 в этом порядке с увеличивающимся расстоянием от генератора 3. Сплошной вал 2 имеет первую точку 7 замера, вторую точку 8 замера, третью точку 9 замера, четвертую точку 10 замера и пятую точку 11 замера, которые расположены в различных и доступных для измерительной техники аксиальных положениях сплошного вала 2.
На фиг. 1 представлены также определенные расчетным путем режимы крутильных колебаний. Представлены при этом четыре низкочастотных режима 14-17 крутильных колебаний, причем первый режим 14 крутильных колебаний имеет самую низкую собственную частоту, второй режим 15 крутильных колебаний вторую низкую собственную частоту, третий режим 16 крутильных колебаний третью низкую собственную частоту и четвертый режим 17 крутильных колебаний четвертую низкую собственную частоту. Четыре собственных частоты при этом ниже, чем 2,5-кратная частота вращения сплошного вала или 2,5-кратная частота сети, в зависимости от того, какая из двух частот выше. Каждый из режимов 14-17 крутильных колебаний описан посредством соответствующей кривой, на которой по абсциссе 12 отмечено аксиальное положение сплошного вала 2, а по ординате 13 угол кручения сплошного вала 2. Поскольку перепад значений угла кручения пропорционален механическому напряжению, то посредством образования перепада угла кручения механическое напряжение может быть определено расчетным путем. Также возможно определять механическое напряжение методом конечных элементов.
В ходе осуществления способа идентифицируется, по меньшей мере, одно положение сплошного вала 2, которое подвержено потерям напряжения. Потерями напряжения могут быть трещины от напряжений и/или статический излом при воздействии разовой нагрузки. Эти положения могут находиться, к примеру, в зоне опор, муфт и/или хвостов лопаток. Для каждой из позиций устанавливается максимальная первая амплитуда напряжения, причем она выбирается таким образом, что не достигается в процессе нормальной работы механической установки, при которой не возникает резонансных помех. Далее она выбрана таким образом, что при ее достижении в этом положении еще не возникают потери напряжения. Максимальная первая амплитуда напряжения при этом одинакова для всех режимов 14-17 крутильных колебаний. Также возможно установить для данного положения максимальную третью амплитуду напряжения, которая выше максимальной первой амплитуды напряжения. Третья максимальная амплитуда напряжения выбрана при этом таким образом, что при ее достижении еще не возникают потери напряжения на сплошном валу.
На основании определенных расчетным путем напряжений для каждого режима крутильных колебаний определяется соотношение между амплитудой напряжения в данном положении и амплитудой напряжения, по меньшей мере, в одной из точек 7-11 замера, причем соотношение представляет собой пропорциональную зависимость. На основании соотношения может быть определена вторая максимальная амплитуда напряжения для точек 7-11 замера, причем вторая максимальная амплитуда напряжения возникает в точке 7-11 замера, когда в данном положении возникает первая максимальная амплитуда напряжения. На основании соотношения может быть определена также и четвертая максимальная амплитуда напряжения для точки 7-11 замера, причем четвертая максимальная амплитуда напряжения возникает в точке 7-11 замера, когда в данном положении возникает третья максимальная амплитуда напряжения.
Механическое напряжение расположенной радиально вовне поверхности сплошного вала 2 измеряется в каждой точке 7-11 замера посредством, по меньшей мере, одного магнитострикционного датчика 18. Из соображений резервирования на каждой точке 7-11 замера может быть предусмотрено большое количество магнитострикционных датчиков. Магнитострикционный датчик 18 имеет передающую катушку, посредством которой создается магнитное поле. Поверхность сплошного вала 2 пронизывается магнитным полем. Магнитострикционный датчик 18 имеет приемную катушку или несколько приемных катушек, которые таким образом расположены в магнитном круге совместно с передающей катушкой и пронизываемой поверхностью сплошного вала 2, что, таким образом, может быть определена магнитная восприимчивость поверхности сплошного вала 2. На основании эффекта Виллари магнитная восприимчивость сплошного вала 2 зависит от его механического напряжения. Выданный магнитострикционным датчиком сигнал при этом пропорционален напряжению кручения магнитного поля. Как можно видеть на фиг. 2, катушка возбуждения и приемная катушка интегрированы в измерительную головку 19 магнитострикционного датчика 18. Между измерительной головкой 19 и сплошным валом 2 имеется воздушный зазор 20, благодаря которому способ может быть осуществлен посредством магнитострикционного датчика 18 бесконтактным способом.
В способе посредством магнитострикционного датчика 18 производится замер механических напряжений с разрешением во времени. Измеренные напряжения могут быть затем отфильтрованы посредством полосового фильтра, который может пропускать диапазон частот вокруг собственной частоты режима крутильных колебаний. В альтернативном варианте возможно оценивать измеренные напряжения посредством преобразования Фурье, в частности, посредством быстрого преобразования Фурье. Как только это отфильтрованное напряжение или полученная посредством преобразования Фурье амплитуда напряжения достигнет второй максимальной амплитуды напряжения или превысит ее, выдается сигнал. Для случая, когда собственные частоты близки друг другу, может быть необходимо предусмотреть полосовой фильтр, который может пропускать собственные частоты для большого количества режимов крутильных колебаний. В этом случае сигнал выдается, если отфильтрованное напряжение достигает самой низкой из вторых максимальных амплитуд напряжения большого количества режимов крутильных колебаний или превосходит ее. Для случая, когда предусмотрена максимальная четвертая амплитуда напряжения, отключение механической установки 1 может быть предусмотрено в случае, когда отфильтрованное напряжение достигает максимальной четвертой амплитуды напряжения или превосходит ее.
Возможно использовать для определенного режима 14-17 крутильных колебаний лишь одна единственная точка 7-11 замера. При этом используется та точка 7-11 замера, которое имеет самое высокое определенное расчетным путем напряжение для определенного режима 14-17 крутильных колебаний для достижения высокого значения соотношения сигнал/шум. Для этого возможно на фиг. 1 для каждого режима 14-17 крутильных колебаний идентифицировать ту точку 7-11 замера, которая имеет наибольший перепад угла поворота. В альтернативном варианте возможно для каждого режима 14-17 крутильных колебаний идентифицировать ту точку 7-11 замера, которая имеет максимальные, определенные расчетным путем, напряжения. На фиг. 1 это, к примеру, для первого режима 14 крутильных колебаний третья точка 9 замера, для второго режима 15 крутильных колебаний третья точка 9 замера, для третьего режима 16 крутильных колебаний вторая точка 8 замера и для четвертого режима 17 крутильных колебаний пятая точка 11 замера.
Также возможно использование измеренных в большом количестве точек 7-11 замера напряжений для идентификации режима 14-17 крутильных колебаний, в котором осуществляет колебания сплошной вал 2. Для этого для каждого режима 14-17 крутильных колебаний формируется расчетное соотношение формы Ar1 : Ar2 : … : Arn, причем Arx является определенной расчетным путем амплитудой напряжения в точке x замера, а n это количество точек замера. На основании определенных в ходе замеров амплитуд напряжения формируется экспериментальное соотношение формы Ae1 : Ae2 : … : Aen,, причем Aex является определенной на основании замеров амплитудой напряжения в точке x замера. За счет сравнения расчетного соотношения с экспериментальным соотношением режим крутильных колебаний, в котором осуществляет колебания сплошной вал 2, может быть однозначно использован даже в том случае, когда собственные частоты различных режимов крутильных колебаний близки друг другу.
Фиг. 3 наглядно поясняет способ на блок-схеме технологического процесса. На этапе a производится динамический расчет, в ходе которого расчетным путем определяется собственная частота для, по меньшей мере, одного режима крутильных колебаний сплошного вала 2 и возникающих в период режима крутильных колебаний механических напряжений сплошного вала 2. На этапе б устанавливаются три предельных значения σSTORE, σW и σA, причем σSTORE < σW < σA, σW - это вторая максимальная амплитуда напряжения, а σA - четвертая максимальная амплитуда напряжения. При этом может быть выбрано, к примеру, соотношение σSTORE = 0,5 * σAи σW = 0,75 * σA.
На этапе с) измеряются напряжения сплошного вала 2, а на этапе d) измеренные напряжения отображаются. На этапе e измеренные напряжения отфильтровываются посредством полосового фильтра для определения амплитуд напряжения при соответствующей собственной частоте. На этапе е отфильтрованные амплитуды напряжения отображаются.
На этапе ж инициируется запрос о превышении отфильтрованной амплитудой напряжения предельного значения σSTORE. Если это произошло, то на этапе з) замеренные напряжения запоминаются. В альтернативном варианте возможно запоминать измеренные напряжения с большими временными тактами в течение длительного времени, а на этапе з) запоминать замеренные напряжения с небольшими временными тактами.
На этапе и инициируется запрос о превышении отфильтрованной амплитудой напряжения предельного значения σW. Если это произошло, то на этапе и выдается предупредительный сигнал. На этапе к) инициируется запрос о превышении отфильтрованной амплитудой напряжения предельного значения σA. Если это произошло, то на этапе л) выдается сигнал тревоги. Сигнал тревоги может способствовать тому, что пользователь механической установки выключит ее вручную. В альтернативном варианте сигнал тревоги может способствовать тому, что происходит автоматическое выключение механической установки.
Несмотря на то, что изобретение проиллюстрировано и описано более детально на основании предпочтительного примера осуществления, изобретение не ограничивается представленными примерами, и на их основании специалистом могут быть сформированы другие варианты в пределах объема правовой защиты.
Реферат
Изобретение относится к способу эксплуатации имеющей сплошной вал механической установки с этапами: а) определение расчетным путем собственной частоты по меньшей мере одного режима крутильных колебаний сплошного вала и определение расчетным путем возникающих во время периода колебаний режима крутильных колебаний механических напряжений сплошного вала, б) определение, соответственно, соотношения для каждого режима крутильных колебаний между первой амплитудой напряжения, которая возникает в положении сплошного вала, которое подвержено потерям напряжения, и второй амплитудой напряжения, которая возникает в точке замера сплошного вала, на основании определенных расчетным путем для соответствующего режима крутильных колебаний напряжений, в) установление максимальной первой амплитуды напряжения для положения, г) определение соответствующей максимальной первой амплитуде напряжения максимальной второй амплитуды напряжения для точки замера на основании соотношения, д) измерение напряжения сплошного вала во время вращения сплошного вала в точке замера, в зависимости от времени, е) определение амплитуды напряжения при каждой собственной частоте на основании измеренного напряжения, ж) выдача сигнала в случае, когда определенная на основании измеренных напряжений амплитуда напряжения при одной из собственных частот достигает максимальной второй амплитуды напряжения. Технический результат изобретения – упрощение определения нагрузки на сплошной вал посредством крутильных колебаний. 14 з.п. ф-лы, 3 ил.
Формула
Документы, цитированные в отчёте о поиске
Волоконно-оптическая система и способ измерения множественных параметров турбомашинной системы
Комментарии