Волоконно-оптическая система и способ измерения множественных параметров турбомашинной системы - RU2513646C2
Код документа: RU2513646C2
Чертежи




















Описание
Уровень техники изобретения
Изобретение относится, в целом, к волоконно-оптическим системе и способу измерения множественных параметров для мониторинга рабочего состояния турбомашинной системы и, в частности, к системе и способу, позволяющим одновременно обеспечивать измерение статического и динамического крутящего момента и вибрации в турбомашинной системе.
Измерение крутящих турбомашинных моментов, которые изменяются вдоль его валов, предоставляют инженерам-конструкторам важную информацию для проверки и повышения эффективности системы. Кроме того, механическая разъюстировка, трение при движении между ротором и статором, искривление валов, пробуксовка соединений и другие случайные силы обычно приводят к возникновению статических и динамических крутящих моментов на роторах и валах и изгибной и торсионной вибрации, которые обуславливают большинство отказов. Крутящие моменты и вибрации являются некоторыми из критических параметров, которые можно измерять для мониторинга эффективности генерации энергии или ухудшения в турбомашинной системе, которая может содержать паровую турбину, генератор, силовой редуктор и газовую турбину. Их можно измерять с помощью резистивных тензодатчиков, датчиков стационарной близости, магнитострикционных и магнитоупругих датчиков. Эти датчики на основе вращения должны монтироваться на или вблизи поверхности ротора и вала, что не всегда возможно в силу пространственных ограничений. Недостатком этих традиционных технологий измерения является влияние изменений условий окружающей среды, например температуры, давления, просвета, влажности и электромагнитных помех. Поскольку типичная турбомашинная система работает при температурах от около 100°F до около 1200°F и при высокой влажности, она подвергается переменным торсионным или изгибным вибрациям и радиальному тепловому расширению вследствие больших динамических механических деформаций и изгибных и торсионных вибраций. Они могут влиять на точность и срок службы этих измерительных устройств. Поэтому такие измерительные устройства не надежны при долговременной эксплуатации на крупной турбомашине.
Измерение крутящего момента на роторе и на валу включает в себя определение мощности турбины или другого вращающегося устройства, генераторов или потребителей. В промышленности ISO 9000 и другие спецификации контроля качества требуются для измерения крутящего момента во время изготовления, особенно в случае применения крепежных деталей. В настоящее время не существует практической измерительной системы, которая могла бы измерять статический и динамический крутящий момент турбомашинной системы, например поверхности ротора и вала паровой турбины, всякий раз, когда в месте измерения необходимо производить измерение в суровых условиях.
Известные техники оптического измерения крутящего момента предусматривают использование способов отклонения лазерного пучка на основе свободного пространства для измерения крутящего момента за счет отражения лазерного пучка от микрозеркала, внедренного в поверхность вала. Такие устройства трудно использовать в среде паровой турбины вследствие поглощения лазерного пучка паром, а также вследствие требований к обслуживанию оптической поверхности микрозеркала, которая чувствительна к среде потока пара, а также к механической юстировке и вибрации.
Подобные известные системы измерения вибрации на основе оптической интерференции позволяют измерять механическую деформацию и смещение, но эти системы не предназначены для турбомашинной системы для обеспечения механической деформации вала ротора паровой турбины, связанной с обнаружением вибрации, поскольку тепловое расширение затрудняет поддержание оптической фокусировки и целостности сигнала в динамической среде.
Все современные технологии, например датчики стационарной близости, резистивные тензодатчики, магнитострикционные и магнитоупругие датчики, недостаточно надежны для устойчивой работы в турбомашинной системе, например в среде паровой турбины, в течение срока эксплуатации оборудования, и все они чувствительны к температуре. Такое свойство чувствительности к температуре обуславливает серьезные проблемы надежности и приводит к потере точности.
Другая проблема, связанная с современными технологиями, относится к параметрам установки этих традиционных устройств измерения крутящего момента/вибрации в турбомашинной системе, например в среде паровой турбины, включающим в себя, без ограничения, влажность, давление, переменные электромагнитные помехи, температура в пределах 100 -1200°F, и изгибная или торсионная вибрация ротора. Тензодатчик, например, необходимо устанавливать на поверхности ротора, и магнитострикционный датчик необходимо устанавливать вблизи поверхности вала в зазоре или просвете менее нескольких сотен микрон. Температурные флуктуации в турбомашинной системе, например на разных ступенях паровой турбины, порождают значительное переходное тепловое расширение и изгибную или торсионную вибрацию ротора. В суровых условиях окружающей среды надежные измерения крутящего момента и вибрации между паровой турбиной и генератором, между генератором и силовым редуктором и между силовым редуктором и газовой турбиной и на отдельных ступенях паровой турбины позволят отслеживать производительность и более оптимально планировать ремонтные работы, доводя до максимума работоспособность и отдачу турбины.
Кроме того, изгибная и торсионная вибрации, обусловленные сдвигами нагрузки между паровой турбиной и генератором, между генератором и силовым редуктором и между силовым редуктором и газовой турбиной, могут порождать переходные колебания, которые превышают уровни напряжения устойчивого состояния в условиях полной нагрузки. Такие переходные нелинейные колебания могут приводить к износу подшипников, изгибной деформации валов и высокой крутящей нагрузке, что угрожает устойчивости системы генерации энергии на основе паровой турбины, помимо других эффектов. Традиционная технология измерения вибрации, например с использованием акселерометров, тензодатчиков, зондов близости и тахометров, может ограничиваться либо суровыми условиями среды паровой турбины, включающими в себя, без ограничения, температуру, давление, пар, частицы пыли, влажность и высокий расход, либо их природой как контактных и электрических измерительных устройств.
В нормальных условиях работы вала, которые соответствуют состоянию устойчивого равновесия, наблюдаемый низкочастотный случайный вибрационный сигнал, хотя и малый, может быть результатом трения при движении между ротором и статором, искривления валов, пробуксовки соединений и других случайных сил. Изгибные моды вибрации обусловлены, в основном, механической разъюстировкой вращающейся системы, распределением температуры и разбалансировкой; тогда как торсионная вибрация может быть следствием динамикой крутящего момента, обусловленной изменением состояния нагрузки вала, и переходных изменений скорости вращения. Внешние неизвестные силы возбуждения, переходное переключение мощности и нестабильная работа системы в целом также могут порождать переходные нелинейные моды вибрации, которые могут иметь высокие амплитуды вибрации. Кроме того, ухудшение лопаток турбины приводит к уменьшению отдачи и может отслеживаться путем снижения частотных изменений крутящего момента и вибрации.
Ввиду вышеизложенного было бы преимущественно и полезно обеспечить практическое решение для оперативного анализа крутящего момента и вибрации турбомашинной системы, например паровой турбины, для повышения производительности генерации энергии, а также контроля и оптимизации эффективности генерации энергии. Это решение должно обеспечивать надежное средство измерения статического и динамического крутящего момента, линейных и нелинейных вибраций на вращающихся валах или надежное средство диагностики и прогнозирования отказов. Надежные измерения крутящего момента и вибрации между секциями турбины и между отдельными ступенями турбины в турбомашинной системе позволят отслеживать производительность и более оптимально планировать ремонтные работы, доводя до максимума эффективность генерации энергии турбомашинной системы. Также было бы преимущественно, если бы систему и способ измерения статического и динамического крутящего момента для турбомашинной системы также можно было легко приспособить для надежного измерения линейных и нелинейных характеристик вибрации вала.
Сущность изобретения
Механическая разъюстировка, трение при движении между ротором и статором, искривление валов, пробуксовка соединений и другие случайные силы обычно приводят к возникновению статических и динамических крутящих моментов на роторах и валах; тогда как сдвиги нагрузки между паровой турбиной и генератором, между генератором и силовым редуктором и между силовым редуктором и газовой турбиной могут порождать переходные изгибные и торсионные колебания, которые могут превышать уровни напряжения устойчивого состояния в условиях полной нагрузки. В свою очередь, такие переходные нелинейные колебания также могут приводить к износу подшипников, изгибной деформации валов и высокой крутящей нагрузке, что угрожает устойчивости системы генерации энергии на основе паровой турбины, помимо других эффектов.
Повышение и оптимизация эффективности генерации энергии, диагностика и прогнозирование отказов для турбомашинной системы подлежат мониторингу посредством оперативной измерительной системы. Описанные здесь варианты осуществления обеспечивают надежное средство измерения статического и динамического крутящего момента, линейных и нелинейных вибраций на вращающихся валах либо внутри паровой турбины между паровой турбиной и генератором, между генератором и силовым редуктором или между силовым редуктором и газовой турбиной. Любое решение также должно быть практичным для установки измерительного зонда в суровых условиях окружающей среды, которое может удовлетворять требуемому рабочему состоянию по температуре, влажности, давлению, расходу и т.д.
Измерения пропускания и отражения на волоконно-оптической основе можно использовать для разных применений измерения. Доставлять свет и снимать сигнал приходится через герметичные кабели. Что более важно, сигналы измерения, либо для получения статических и динамических параметров, например крутящих моментов, либо для получения линейных и нелинейных параметров, например изгибных и торсионных мод вибрации, необходимо декодировать и анализировать.
Поэтому существует необходимость в обеспечении развертываемого в условиях эксплуатации герметически упакованного волоконного измерительного зонда, системы и способа измерения множественных параметров и решения по установке, пригодного для одновременного измерения распределенных, стационарных и динамических параметров в чрезвычайно суровых условиях окружающей среды, например в турбомашинной системе в целом и в паровой турбине, в частности.
Один вариант осуществления настоящего изобретения содержит светоделитель на основе пучка волокон. Такое оптическое устройство эффективно делит свет от единого источника света для передачи света во множественные места. Источник света, согласно одному варианту осуществления, содержит: множество многомодовых волокон, сконфигурированных по случайному, половинчатому, регулярному или коаксиальному шаблону. Эти волокна связаны друг с другом высокотемпературным керамическим адгезивом и загерметизированы металлическим материалом, например нержавеющей сталью.
Другой вариант осуществления настоящего изобретения содержит зонд отражения на основе пучка волокон 1×2. Такое оптическое устройство эффективно доставляет источник света к месту измерения и одновременно измеряет отражение на поверхности вала. Оно содержит: множество многомодовых волокон, сконфигурированных по случайному, половинчатому, регулярному или коаксиальному шаблону. Эти волокна связаны друг с другом высокотемпературным керамическим адгезивом и загерметизированы металлическим материалом, устойчивым к окислению, например инконелем. Часть волокон предназначена для доставки света, и часть волокон предназначена для съема сигнала измерения.
Еще один вариант осуществления этого изобретения содержит способ оптического кодирования с использованием внедренных клиновидных канавок или периодических или апериодических шаблонов, созданных методом микромашинной обработки, и прямых линий, нанесенных на внешнюю поверхность вала. Апериодический шаблон кодирования используется для измерения статического крутящего момента, тогда как периодические или прямые линии используются для обнаружения динамического крутящего момента и торсионной вибрации.
Согласно еще одному варианту осуществления, предусмотрена волоконно-оптическая измерительная система, которая содержит источник света, способный передавать свет в множественные места на поверхности вала турбомашинной системы через пучок оптических волокон 1×N, причем множество местоположений на поверхности вала располагается в, по существу, аксиальном направлении между концами, по меньшей мере, одного вала, благодаря чему множество динамических отраженных световых сигналов принимается из множества местоположений на поверхности вала, когда, по меньшей мере, один вал нагружен; в которой отраженный сигнал из любого места снимается с помощью герметичного зонда отражения 1×2; и сигналы от множественных зондов отражения поступают на матрицу светочувствительных детекторов для дальнейшего анализа во временной области и в частотной области. Крутящие моменты и торсионная вибрация кодируются либо механически нанесенными клиновидными канавками, либо шаблонами, созданными методом микромашинной обработки. Один вариант осуществления волоконно-оптической измерительной системы содержит матрицу светочувствительных детекторов, способную регистрировать динамический свет, отраженный от поверхности, по меньшей мере, одного вала турбомашинной системы в ответ на пропущенный свет во время вращения, по меньшей мере, одного вала турбомашинной системы, и генерировать из него сигналы динамического отраженного света. Крутящий момент на валу и характеристики вибрации определяются на основании, по меньшей мере, одной характеристики отраженных световых сигналов, принятых с поверхности вала с кодировкой либо из непрерывного возбуждения света, либо из частотно-модулированного света и путем обработки сигнала на основе синхронизации.
Согласно еще одному варианту осуществления, волоконно-оптическая измерительная система для измерения рабочего состояния турбомашинной системы, связанного с изгибными модами вибрации и нелинейной вибрацией, содержит частотно-модулированный источник света, способный передавать свет в множественные места на поверхности вала турбомашинной системы через оптический соединитель 1×N, причем динамические отраженные световые сигналы принимаются с помощью множественных герметичных зондов отражения 1×2, которые подключены к матрице светочувствительных детекторов для анализа сигналов во временной области и в частотной области. Волоконные зонды отражения располагаются во множестве местоположений вблизи поверхности вала, что не требует механической или оптической кодировки на поверхности вала. Один вариант осуществления дополнительно содержит матрицу светочувствительных детекторов, которые могут представлять собой приборы с зарядовой связью (ПЗС) или детекторы на основе комплементарной структуры металл-оксид-полупроводник (КМОП), способную регистрировать динамический свет, отраженный от поверхности, по меньшей мере, одного вала турбомашинной системы в ответ на отраженные от нее динамические световые сигналы. Быстрое преобразование Фурье измеренной динамической отражения используется для определения линейной и нелинейной константы и мгновенного вибрационного состояния турбомашинной системы.
Описание чертежей
Эти и другие признаки, аспекты и преимущества настоящего изобретения явствуют из нижеследующего подробного описания, приведенного со ссылкой на прилагаемые чертежи, снабженные сквозной системой обозначений, в которых:
фиг.1 - волоконно-оптические приборы измерения крутящего момента и вибрации для турбомашинной системы согласно одному варианту осуществления изобретения;
фиг.2 - схема волоконно-оптической системы измерения крутящего момента на основе фазового сдвига для паровой турбины согласно одному варианту осуществления изобретения;
фиг.3 - электронная схема кодирования и обработки сигнала для волоконно-оптического датчика крутящего момента согласно одному варианту осуществления изобретения;
фиг.4 - упрощенная схема, демонстрирующая технику измерения крутящего момента на основании многоточечных дифференциальных фазовых сдвигов согласно одному варианту осуществления изобретения;
фиг.5 - схема, демонстрирующая условие ширины импульсного источника света для измерения крутящего момента согласно одному варианту осуществления изобретения;
фиг.6 - схема, демонстрирующая исходные сигналы и сигналы статического и динамического крутящего момента, измеренные путем изменения ширины входного импульса источника света согласно одному варианту осуществления изобретения;
фиг.7 - схема разветвленного пучка волокон для доставки источника света на множественные зонды отражения согласно одному варианту осуществления изобретения;
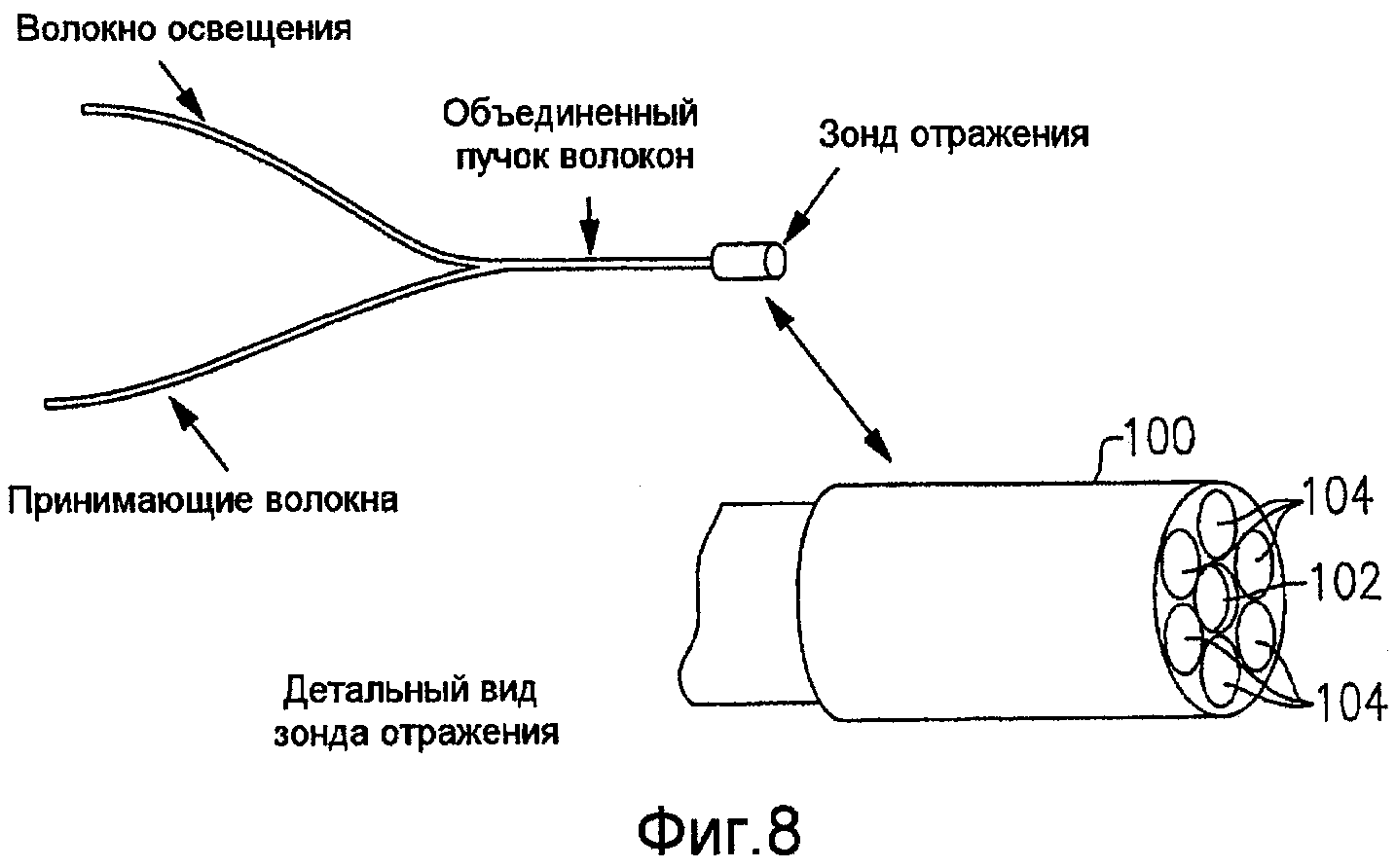
фиг.8 - схема зонда отражения с конфигурацией волокон 6x1 для доставки света и его приема от поверхности вала согласно одному варианту осуществления изобретения;
фиг.9 - конфигурация расстояния зонда для обнаружения крутящего момента от поверхности вала и его соответствующих рабочих точек согласно одному варианту осуществления изобретения;
фиг.10 - уровни отражения в разных рабочих точках для зонда для обнаружения крутящего момента, показанного на фиг.9;
фиг.11 - способы кодирования поверхности вала, включающей в себя линии в виде клиновидных канавок и прямые линии согласно конкретным вариантам осуществления изобретения;
фиг.12 - более подробная схема трех шаблонов кодирования поверхности вала, показанных на фиг.10;
фиг.13 - сигналы измерения крутящего момента из разных шаблонов кодирования в одной рабочей точке;
фиг.14 - сигналы статического крутящего момента от разных зондов от поверхности вала с кодировкой прямыми линиями в пределах одного цикла;
фиг.15 - сигналы статического крутящего момента от разных зондов от поверхности вала с кодировкой клиновидными канавками в пределах одного цикла;
фиг.16 - графическое представление обнаружения динамического крутящего момента из задержки по времени между первым зондом и k-м зондом как функции времени;
фиг.17 - графическое представление отраженного сигнала от поверхности вала с кодировкой периодическими линиями согласно одному варианту осуществления изобретения;
фиг.18 - графическое представление измеренного крутящего момента и соответствующего угла скручивания согласно одному варианту осуществления изобретения;
фиг.19 - один участок волоконно-оптической системы мониторинга вибрации для паровой турбины согласно одному варианту осуществления изобретения;
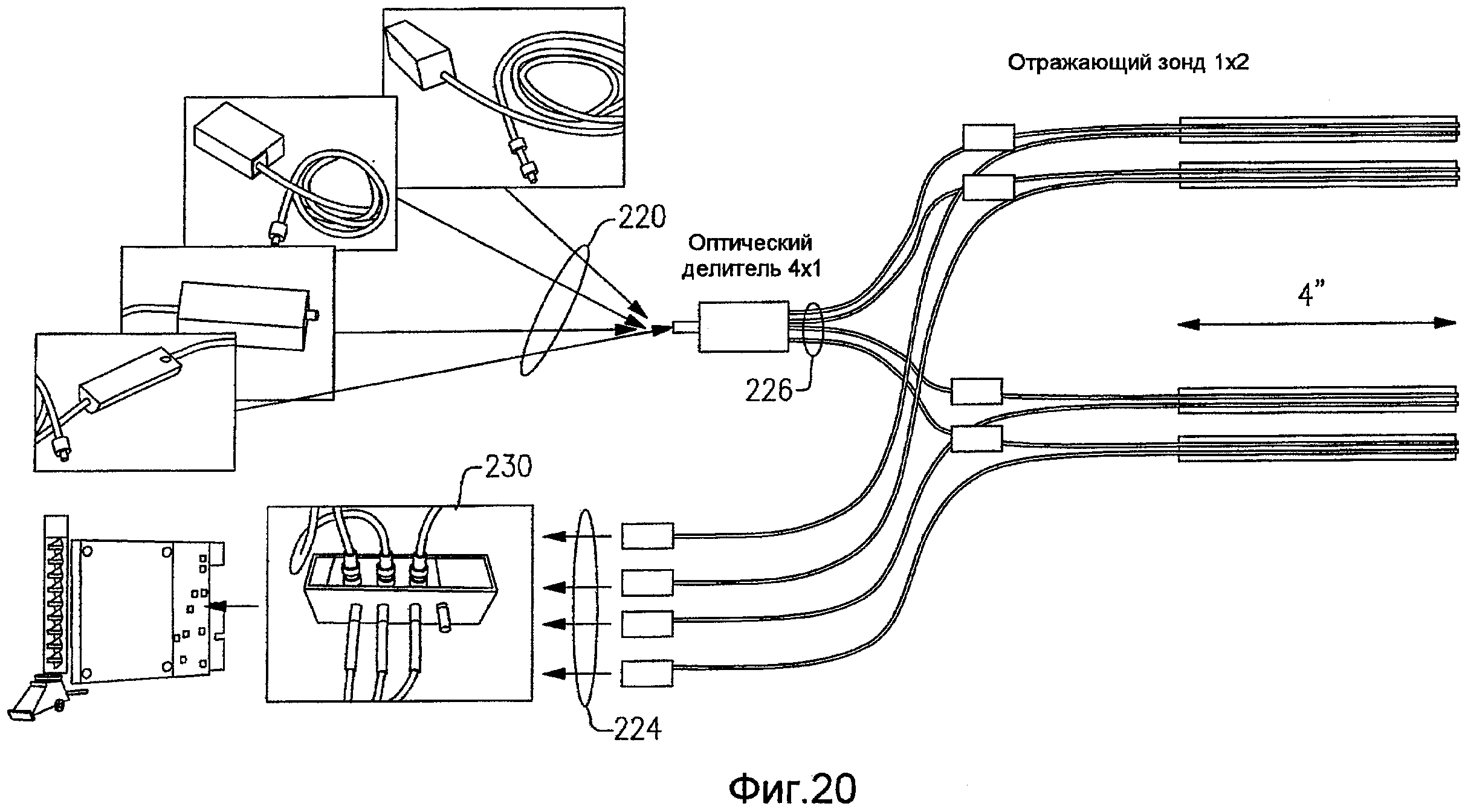
фиг.20 - техника передачи лазерных световых сигналов через пучок оптических волокон в четыре зонда отражения и приема множественных отраженных сигналов от четырех зондов отражения в ответ на передачу сигналов согласно одному варианту осуществления изобретения;
фиг.21 - принципы обнаружения сигнала динамической изгибной вибрации на основе отражения согласно одному варианту осуществления изобретения;
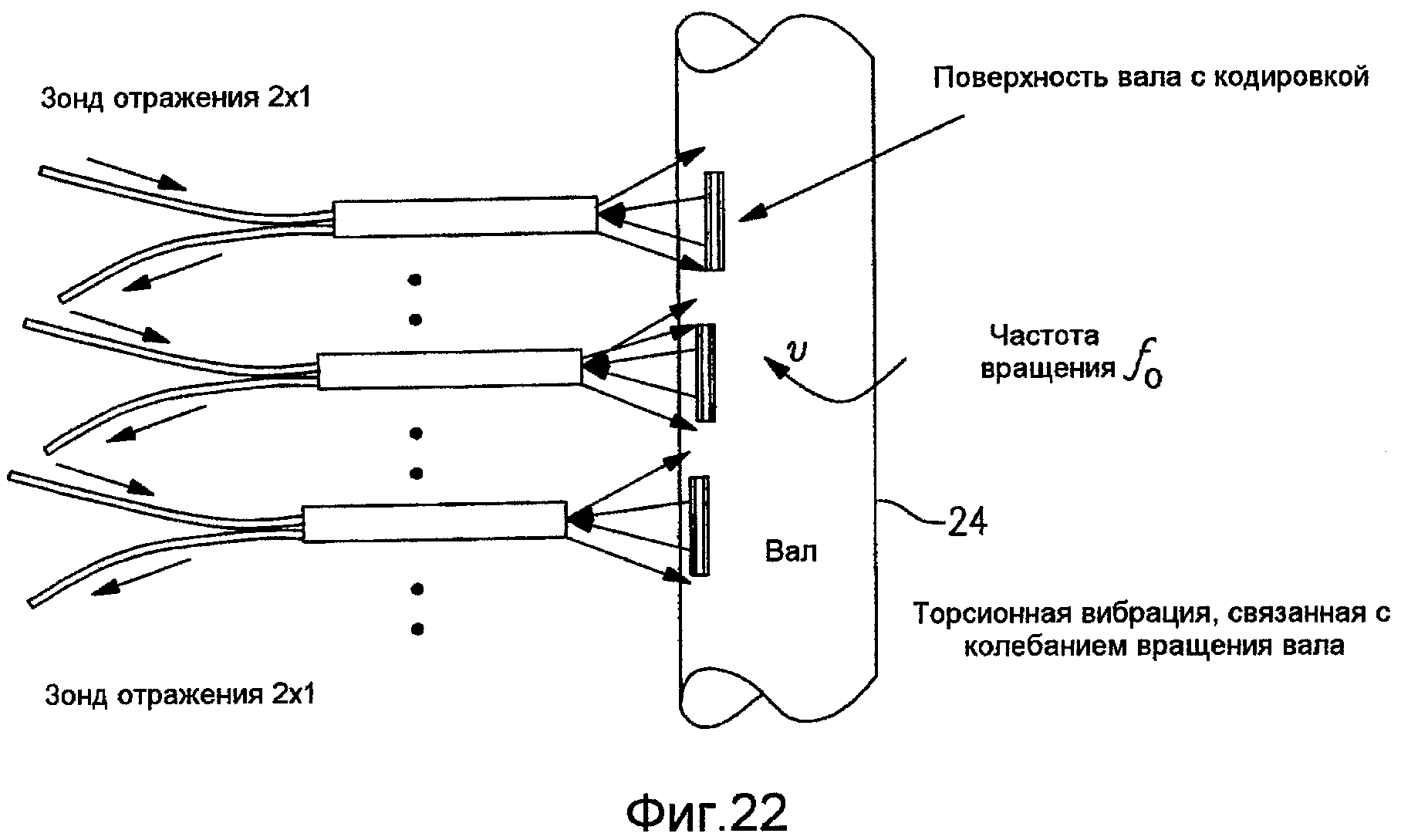
фиг.22 - техника обнаружения многоточечного сигнала динамической торсионной вибрации на основе отражения согласно одному варианту осуществления изобретения;
фиг.23 - многоточечный сигнал динамической торсионной вибрации на основе отражения во временной области согласно одному варианту осуществления изобретения; и
фиг.24 - многоточечный спектр динамической торсионная вибрация на основе отражения от зонда согласно одному варианту осуществления изобретения.
Хотя на вышеописанных чертежах показаны альтернативные варианты осуществления, можно предложить другие варианты осуществления настоящего изобретения, упомянутые в описании. В любом случае, данное раскрытие представляет иллюстративные варианты осуществления настоящего изобретения в порядке представления, но не ограничения. Специалисты в данной области техники могут предложить многие другие модификации и варианты осуществления, которые отвечают объему и сущности принципов этого изобретения.
Подробное описание
Здесь описана волоконно-оптическая система измерения статического и динамического крутящего момента и вибрации в суровых условиях окружающей среды согласно одному варианту осуществления для повышения эффективности генерации энергии турбомашинной системы или мониторинга ухудшения состояния и возможных отказов. В отличие от традиционных температурно-чувствительных датчиков стационарной близости, магнитострикционных и магнитоупругих датчиков, описанные здесь варианты осуществления волоконно-оптической мультипараметрической измерительной системы нечувствительны к температуре и мультиплексированы зондами на основе разветвленного пучка волокон, которые либо распределены на ступенях разного давления в паровой турбине, либо развернуты между паровой турбиной и генератором, между генератором и силовым редуктором, между силовым редуктором и газовой турбиной и/или между компрессорными ступенями, для многоточечного мониторинга состояния конструкции турбомашинной системы.
Например, на фиг.1 показаны волоконно-оптические приборы 200 измерения крутящего момента и вибрации для турбомашинной системы согласно одному варианту осуществления изобретения. Волоконно-оптические приборы 200 измерения крутящего момента и вибрации способны осуществлять многоточечный мониторинг рабочего состояния турбомашины в паровой турбине 202, между паровой турбиной 202 и генератором 204, между генератором 204 и силовым редуктором 206, между силовым редуктором 206 и газовой турбиной 208 и внутри газовой турбины 208. Волоконно-оптическая измерительная система может быть локально распределена либо в паровой турбине, либо в газовой турбине, либо, в общем случае, распределена в турбомашинной системе от паровой турбины, через генератор, силовой редуктор до газовой турбины для диагностики отказов, прогнозирования и долгосрочного мониторинга производительности.
Один вариант осуществления волоконно-оптической измерительной системы, описанный далее со ссылкой на фиг.2, для измерительных зондов на основе пучка из множественных волокон, установленных вдоль поверхности 24 вала, включает в себя источник 12 многоцветного освещения (например, лазеры с множественными длинами волны или широкополосный СИД), излучающий свет в видимом (405-671 нм) или ближнем инфракрасном (1.0-1.7 мкм) диапазоне, который либо модулируется импульсами микросекундной длительности, либо используется в непрерывном режиме. Источник освещения делится на множественные ответвления оптическим делителем 1×N и поступает в разные области 14, 16, 18, 20 на поверхности 24 вала турбомашины, причем каждая область включает в себя либо оптический, либо механический механизм кодирования 38, высокотемпературные зонды 26, 28, 30, 32 отражения на основе пучка волокон 1×2, используются для приема сигнала отражения вблизи поверхности вала и передают эти сигналы на матрицу 34 светочувствительных детекторов и блок 36 обработки сигнала. Если источник света модулируется, синхронный усилитель многоканального отсчета обеспечивает необходимое квитирование между матрицей 34 высокоскоростных фотодиодных детекторов и многоцветным источником освещения 12.
Источник освещения может быть непрерывной волной, что позволяет всем зондам 26, 28, 30, 32 отражения регистрировать сигнатуры максимальной отражения от поверхности 14, 16, 18, 20 вала с оптической кодировкой. Статический сигнал, отраженный от поверхности, по меньшей мере, одного вала турбомашинной системы, анализируется путем дифференцирования сигнатур отражения из любых двух сигналов зонда. Статическое(ий) скручивание вала или крутящий момент определяется из разности между сигнатурами оптических кодированных сигналов любых двух зондов отражения.
Длительность светового сигнала сначала модулируется, чтобы все зонды 26, 28, 30, 32 отражения могли регистрировать максимальную разность отражения от кодеров 38 поверхности вала. Динамический сигнал, отраженный от поверхности, по меньшей мере, одного вала турбомашинной системы анализируется путем дифференцирования задержки по времени между любыми двумя сигналами зонда. Задержка по времени определяется сигнатурами отражения, индуцированными валом с кодированием, от любых двух зондов отражения. Затем динамический крутящий момент на валу определяется на основании скорости вращения вала и модуля упругости материала вала.
Признак, обеспечиваемый системой 10 измерения динамического крутящего момента, состоит в том, что крутящий момент можно обнаружить либо путем модуляции длительности светового импульса, чтобы она была равна времени, необходимому для регистрации задержки по времени, индуцированной крутящим моментом, либо путем дифференцирования растущей задержки по времени сигнала, исходящего от краев хорошо отражающей полоски с кодированием на поверхности 24 вала турбомашины. Кроме того, быстрое преобразование Фурье на сигнале сигнатуры отражения может обеспечивать оперативный анализ как на торсионных модах вибрации, так и на модах вибрации, связанных с отказом.
Еще один признак, обеспеченный системой 10 измерения статического и динамического крутящего момента, состоит в том, что ее определение крутящего момента на основе фазы не зависит от интенсивности отраженного сигнала и потому не оказывает негативного влияния за счет ухудшения отражения или флуктуации рассеяния света вследствие коррозии, эрозии поверхности вала или загрязнений на оптическом пути между зондами 26, 28, 30, 32 отражения и кодерами 38 поверхности вала.
Третий признак связан с относительно большим просветом (1-10 мм) между поверхностью 24 вала турбомашины и зондами 26, 28, 30, 32 отражения, который обеспечивает удобный способ установки, допускающий изгибную или торсионную вибрацию и радиальное тепловое расширение ротора турбомашины.
Еще один признак, обеспеченный системой 10 измерения статического и динамического крутящего момента, состоит в том, что ее источник 12 освещения с множественными длинами волны, который гарантирует, что измерение крутящего момента нечувствительно к влажности, минеральному маслу и грязи благодаря одновременному дифференциальному измерению крутящего момента с двумя или множественными длинами волны источников света. С другой стороны, кодеры поверхности вала, окружающие внешнюю поверхность вала, дополнительно ослабляют возможные искаженные сигнатуры отражения из загрязненного кодера.
Один вариант осуществления системы 10 измерения крутящего момента демонстрирует измерение крутящего момента с разрешением лучшим 0.05 градуса во время эксплуатации при комнатной температуре, и разрешение должно быть лучше 0.1 градуса при температуре около 1200°F.
В кратком объяснении, волоконно-оптическая измерительная система 10 обеспечивает автономный инструмент, который можно просто установить в турбомашинной системе, например паровой турбине, для мониторинга крутящего момента ротора на валу на ступенях разного давления. Основными компонентами этого инструмента являются источник освещения (например, многоцветный лазер или широкополосный СИД) 12, разветвленный волоконно-оптический делитель 22, матрица 26, 28, 30, 32 высокотемпературных измерительных зондов отражения 1×2, матрица 34 светочувствительных детекторов, процессор 36 сигнала и соответствующее программное обеспечение обработки сигнала. Поверхность вала с кодировкой обеспечивает такую волоконно-оптическую измерительную систему для измерения некоторых критических параметров, например статического крутящего момента, динамического крутящего момента и торсионной вибрации ротора. Другие признаки включают в себя:
Волоконно-оптическая измерительная система 10 представляет собой технологию на основе мультиплексирования по длине волны, интегрированную с обработкой кодированного сигнала на основе фазового сдвига и БПФ. Сигнал измерения поступает на и от поверхности 24 вала с кодировкой через волокна 26, 28, 30 и 32, устойчивые к высоким температурам, для обеспечения способа мониторинга рабочего состояния вала, который пассивен к любой переходной флуктуации мощности, индуцированной электромагнитными помехами.
Одновременное обнаружение крутящего момента и торсионных вибраций обеспечивает "статический" и "динамический" способы измерения с помощью одной волоконно-оптической системы измерения отражения, которая может быть сокращена до подсистемы, например паровой турбины, или распространена на всю турбомашинную систему электростанции. Комбинация статического и динамического отклика обеспечивает уникальное решение для преодоления проблем современных датчика стационарной близости, резистивного тензодатчика, магнитострикционного и магнитоупругого датчика, связанных с дрейфом исходного сигнала и частой перекалибровкой, а также проблем электромагнитных помех.
Поскольку турбомашинная система включает в себя паровую турбину, газовую турбину и генератор, большинство этих подсистем действуют при температурах от комнатной до около 1200°F при переменном давлении, переменной вибрации и тепловом расширении ротора, которые могут оказывать серьезное влияние на надежность использования этих измерительных устройств. Зонды 26, 28, 30, 32 для обнаружения отражения на основе разветвленного пучка волокон могут выдерживать высокие температуры и давления и достаточно гибки для установки в любом месте на поверхности вала; и, таким образом, обеспечивает способ мониторинга, нечувствительный к условиям окружающей среды.
Волоконно-оптические зонды 26, 28, 30, 32 для измерения отражения можно устанавливать в виде матрицы, и поэтому единый лазерный или СИД источник света можно разделить на много отдельных измерительных зондов, обеспечивая более высокое пространственное разрешение измерения. Таким образом, волоконно-оптическая измерительная система 10 идеальна для применений, которые требуют либо локализованного измерения, либо крупномасштабного многоточечного мониторинга рабочего состояния вала с высоким пространственным разрешением, например, связанного со ступенями высокого давления (HP), промежуточного давления (IP) и низкого давления (LP) паровой турбины.
Использование световых пучков с множественными длинами волны в системе позволяет более надежно отслеживать состояние вала путем одновременного дифференцирования сигналов измерения на разных длинах волны, несмотря на то, что минеральное масло, грязь или корродированные поверхности могут создавать проблемы. Причина в том, что данная длина волны может испытывать сильное поглощение этими загрязнениями, что может приводить к ослаблению или даже потере сигналов, тогда как другие длины волны могут испытывать незначительное поглощение, поэтому дифференциал двух слабо поглощенных пучков может обеспечивать надежный способ измерения параметра в суровых условиях окружающей среды.
Задержка по времени из механизма 38 оптического кодирования (например, отражающих полосок кодирования вала) и кросс-корреляция и фильтрация на основе БПФ сигналов датчика через процессор 36 сигнала для восстановления огибающей шумоподавления и несущей кросс-корреляционной функции обеспечивает технологию оперативного анализа и мониторинга статического и динамического крутящего момента в реальном времени. Согласно одному варианту осуществления, отражающие полоски кодирования поверхности вала с рядом равномерно разнесенных линий создают периодически стробированные сигналы нулевой частоты + несущие сигналы от каждого зонда отражения. Согласно другому варианту осуществления, отражающие полоски кодирования поверхности вала с рядом частотно-модулированных, или неравномерно разнесенных, линий создают непрерывный частотно-модулированный несущий сигнал от каждого зонда отражения. Такой шаблон кодированного сигнала обеспечивает уникальные сигнатуры отражения для статических и динамических параметров измерения, например, крутящего момента и торсионных мод вибрации.
Кросс-корреляция и фильтрация на основе БПФ сигналов отражения для восстановления огибающей шумоподавления и несущей кросс-корреляционной функции преимущественно предотвращает любое снижение точности измерения, индуцированное возможным изменением отражения светового пучка. Для этого сначала получают грубое смещение от огибающей, а затем уточненное смещение (в течение полупериода несущей) из любого фазового сдвига несущей для определения механической деформации, связанной с угловым смещением, и скручивания или углового смещения поверхности вала. Эта техника не только обеспечивает мониторинг состояния статического и динамического крутящего момента, но также преимущественно обеспечивает прямой способ для одновременного измерения торсионной или изгибной вибрации ротора из анализа БПФ сигнала с задержкой по времени.
На фиг.3 показана электронная схема 70 кодирования и обработки сигнала, пригодная для использования с волоконно-оптической измерительной системой 10 согласно одному варианту осуществления изобретения. Совместно вышеописанная технология обнаружения крутящего момента на основе фазового сдвига и способ и систему 70 обработки сигнала на основе БПФ можно использовать для одновременного обнаружения статического и динамического крутящего момента ротора с возможностью автокалибровки, независимо от изменений температуры окружающей среды и дефектов поверхности вала вследствие коррозии и эрозии, помимо прочего.
Кроме того, сигнатура сигнала отражения, вместо абсолютной интенсивности отраженного света, вышеописанная технология анализа и способ и схема 70 обработки сигнала на основе БПФ могут обеспечивать оцифрованные отклики на основе углового смещения на параметр измерения, что гораздо надежнее, чем традиционные аналоговые технологии на основе обнаружения интенсивности или отражения. Разветвленный волоконный делитель 22 и вышеописанные коаксиальные зонды 26, 28, 30, 32 для измерения крутящего момента обеспечивают систему, которая исключает необходимость в оптической юстировке, что позволяет значительно повысить работоспособность системы и снизить требования к обслуживанию системы.
Схема 70 кодирования и обработки сигнала создает периодически стробированные сигналы нулевой частоты + несущие сигналы или апериодические частотно-модулированные сигналы нулевой частоты + несущие сигналы на основании отраженных импульсных световых сигналов (т.е. лазера или СИД), поступающих от отражающих полосок 38 вала турбомашины, которые закодированы, согласно одному варианту осуществления, последовательностью линий с равномерным или частотно-модулированным разнесением для кодирования информации крутящего момента и торсионной вибрации. Механизмы 38 оптического кодирования, согласно одному варианту осуществления, связаны с клиновидной канавкой или металлическим штрих-кодом, внедренным в нужных местах в поверхность 24 вала, которые отражают падающий световой сигнал (т.е. лазера или СИД), как описано выше.
Саму поверхность вала 24 турбомашины можно модифицировать путем изменения, без ограничения, текстуры поверхности для обеспечения областей, имеющих разные глубины относительно других областей поверхности вала. Механизм 38 оптического кодирования можно реализовать, например, путем формирования клиновидной канавки на поверхности вала в нужных местах, чтобы соответствующую задержку по времени можно было обнаружить из любых двух положений клиновидной канавки для определения значения угла скручивания вала, которое можно использовать для определения крутящего момента на валу.
Механизм оптического кодирования, нанесенный на или внедренный в вал турбомашины, также можно реализовать, без ограничения, путем присоединения или иного создания периодического или апериодического частотно-модулированного шаблона или шаблона одной прямой линии на или в поверхности вала в нужных местах, чтобы соответствующую задержку по времени можно было обнаружить.
Кросс-корреляция 64 и фильтрация 66 на основе БПФ 68 сигналов 62 датчика предназначены для восстановления огибающей шумоподавления и несущей кросс-корреляционной функции для обработки сигнала. Грубая оценка (грубое смещение) 76 выводится из огибающей шумоподавления, тогда как уточненное смещение (в течение полупериода несущей) 72 выводится из фазового сдвига несущей для обеспечения оценки 74 фазового сдвига высокой точности, который затем можно использовать для поддержки точного определения информации желаемых скручивания вала и вибрации.
Свет направляется к поверхности вала 24 через разветвленный оптический волоконно-оптический делитель 22. Источник света может представлять собой, без ограничения, источник света СИД, лазерный источник света или широкополосный источник света, например источник белого света или многоцветный источник света, который устойчив к загрязнению вала и т.д., что описано здесь более подробно. Новый или совершенный вал требует только одной длины волны света для обеспечения системы и способа согласно описанным здесь принципам.
Согласно одному варианту осуществления, волоконно-оптический делитель 22 представляет собой пучок волокон, который принимает свет от источника 12 света, как описано выше, и отводит (разделяет) его в отдельные оптические волокна, ведущие к отдельным областям поверхности 24 вала турбомашины. Каждый отвод делителя связан с амплитудой света, которая отличается от амплитуды, связанной с другими отводами делителя вследствие относительных разностей в расстоянии между отводами, по которым должен распространяться свет. Однако длина волны будет одинакова для всех отводов, поэтому сигнатура света остается постоянной на концах отводов. Прохождение множественных длин волны света через волоконно-оптический соединитель может происходить одновременно согласно описанным здесь принципам. Волоконно-оптический соединитель согласно одному варианту осуществления более подробно описан ниже со ссылкой на фиг.7. Такое оптическое устройство содержит множество многомодовых волокон, сконфигурированных по случайному, половинчатому, регулярному или коаксиальному шаблону. Эти волокна связаны друг с другом высокотемпературным керамическим адгезивом и загерметизированы металлическим материалом, например нержавеющей сталью (рабочий диапазон до 1500°F).
Каждый отвод волоконно-оптического соединителя подключен к зонду отражения 26, 28, 30, 32, который имеет отвод падения/передачи и отвод регистрации/измерения. Отвод падения направляет/передает падающий свет на поверхность вала, тогда как отвод измерения принимает модифицированный свет, отраженный поверхностью вала в ответ на падающий свет. Каждый зонд отражения располагается вблизи поверхности вала. Один вариант осуществления зонда отражения более подробно описан ниже со ссылкой на фиг.8. Зонд отражения на основе пучка волокон 1×2 содержит множество многомодовых волокон, сконфигурированных по случайному, половинчатому, регулярному или коаксиальному шаблону. Эти волокна (рабочий диапазон до 2000°F) связаны друг с другом высокотемпературным металлическим адгезивом (рабочий диапазон до 2000°F) и загерметизированы металлическим материалом, устойчивым к окислению, например инконелем 625 (рабочий диапазон до 2100°F).
Отвод измерения зонда отражения подключен к светочувствительному механизму обнаружения, например матрице 34 фотодатчиков, или ПЗС, или КМОП. Шаблон отражения отраженного света на нужной(ых) длине(ах) волны измеряется посредством механизма фотодетектирования, который генерирует нужный(е) сигнал(ы).
Обработка сигнала начинается с калибровки любых разностей между отраженными сигналами, принятыми из разных местоположений на валу турбомашины, поэтому не существует измеримых разностей между измеренными сигналами, распространяющимися по волокнам, когда вал неподвижен. Поэтому все, что может вносить ошибку в измерение крутящего момента, выбрасывается из вычисления крутящего момента.
С учетом вышеописанных структуры и принципов, любой приложенный крутящий момент будет вызывать скручивание вала турбомашины, которое приводит к изменению начального выравнивания между зондами отражения. Любое изменение сигнатур отражения между волоконными зондами отражения измеряется для извлечения информации сигнала, которую можно использовать для определения соответствующего изменения в скручивании вала (значение скручивания) и его динамического изменения вследствие статических и динамических крутящих моментов. Информация нужных крутящего момента на валу и торсионной вибрации (значение крутящего момента) определяется из значения скручивания и его временной зависимости.
Значение крутящего момента можно определить одним из двух методов. Первый метод предусматривает калибровку с использованием датчиков крутящего момента, отвечающих принятому золотому стандарту, которые связывают измеренное значение скручивания с абсолютным значением крутящего момента с использованием поисковой таблицы. Второй метод предусматривает аналитический подход с использованием формул для вычисления крутящего момента на основании измеренного значения скручивания и зависит от таких характеристик вала, как геометрия, модуль упругости материала и т.д. Такие формулы и передаточная функция встроены в программное обеспечение обработки сигнала.
Использование описанных здесь волоконно-оптических приборов преимущественно избавляет от необходимости в особых линзах, призмах, дифракционных решетках и других подобных приспособлениях, необходимых для работы оптики в свободном пространстве, во избежание проблем юстировки, проблем, связанным с изменением температуры, которое влияет на фокусное расстояние, фокусного расстояния и т.д. Использование описанных здесь волоконно-оптических механизмов также позволяет решать вопросы, связанные с механическими свойствами, зависящими от температуры, держателей оптических линз, ступеней и металлических деталей.
Определение значений крутящего момента только на основании измерения фазы может приводить к неопределенностям среди измеренных сигналов. Эти неопределенности можно уменьшить, согласно одному варианту осуществления, применяя техники обработки сигнатуры отражения кодированного оптического сигнала, как описано выше со ссылкой на фиг.3.
Использование волоконной оптики и распределенных техник измерения, например, описанных здесь, преимущественно позволяет использовать один комплект приборов для исключения необходимости в отдельных детекторах. Широкополосный источник света, имеющий множественные длины волны, можно применять для реализации мультипараметрической измерительной системы, которая может проникать в различные типы загрязнения вала, которое может возникать с течением времени, согласно вышеописанным вариантам осуществления изобретения. Кроме того, использование описанных здесь разветвленных пучков волокон обеспечивает надежную измерительную систему, которая невосприимчива, без ограничения, к высоким температурам, влажности и химическим испарениям, например, связанным с отказом оптической системы свободного пространства, который может приводить к фоулингу и расфокусировке линз.
На фиг.4 показана упрощенная схема, демонстрирующая технику измерения крутящего момента на основании многоточечных дифференциальных фазовых сдвигов согласно одному варианту осуществления изобретения. Поверхность 24 вала турбомашины включает в себя одну или несколько кодированных отражающих полосок 38 с рядом равномерно разнесенных линий согласно одному аспекту изобретения. Крутящий момент, приложенный к валу 24 турбомашины, приводит к скручиванию вала, которое вызывает угловое смещение 40 вала 24.
Разветвленные пучки волокон 42, 44 обеспечивают среду передачи для распространения импульсных лазерных пучков к поверхности 24 вала и для приема оттуда отраженных сигналов. Отраженные сигналы принимаются светочувствительными детекторами 34, как показано на фиг.2. Фазовый сдвиг между двумя зондами отражения можно определить по их разнице во времени относительно их позиции максимального пика отражения во временной области.
Исходный или начальный временной сигнал 48 измеряется на основании импульсного лазерного пучка через оптическое волокно 42. Другой сигнал 50 с задержкой по времени измеряется на основании импульсного лазерного пучка через оптическое волокно 44. В частности, смещение 40 крутящего момента определяется на основании разности задержек по времени между принятыми отраженными сигналами в ответ на импульсные лазерные пучки, переданные к поверхности 14, 16, 18, 20 вала с кодировкой и т.д.
Смещение 40 крутящего момента отражающей(их) полоски(ок) 38 можно представить как
Смещение крутящего момента Δα = Δt

Фазовый сдвиг θ = Δα/R, где θ - угловое смещение отражающей(их) полоски(ок) 38 и R - соответствующий радиус вала.
Поскольку множественные точки измеряются на поверхности 24 вала, все обнаруженные сигналы можно электронным способом стробировать по времени для получения всех фазовых сдвигов, которые соответствуют крутящему моменту в разных местах.
На фиг.5 показана схема, демонстрирующая условие ширины импульсного источника света для измерения крутящего момента согласно одному варианту осуществления изобретения. Можно видеть, что продолжительность времени τ применяемого источника света играет роль при определении смещения крутящего момента Δα. На практике непрерывный источник света также можно использовать для обнаружения крутящего момента, где задержка по времени получается путем дифференцирования сигнатур сигнала отражения во временной области от двух разнесенных в пространстве зондов отражения. В простом случае такая сигнатура соответствует пику максимального отражения, когда отраженный сигнал имеет однопиковый профиль. В другом случае такая сигнатура соответствует одному или множественным подпикам из огибающей волнового пакета, который происходит из периодического или апериодического механизма оптического кодирования. Однако использование импульсного источника света более пригодно для поверхности вала, загрязненной ржавчиной или грязью, во избежание паразитных сигналов от неправильных поверхностей вала, и, таким образом, обеспечивает более надежный способ для диагностики и прогнозирования отказов турбомашинной системы.
Одновременное обнаружение задержки по времени и торсионной вибрации ротора обеспечивает измерение статического и динамического крутящего момента с помощью вышеописанной единой волоконно-оптической системы измерения крутящего момента. Эта комбинация двух воспринятых откликов обеспечивает новое решение, которое преодолевает проблемы, связанные с современными датчиками стационарной близости, тензодатчиками, магнитострикционными и магнитоупругими датчиками, включающие в себя, без ограничения, дрейф исходного сигнала и необходимость в частой перекалибровке.
На фиг.6 оказана схема, иллюстрирующая набор исходных сигналов 80 из множественных зондов отражения на основе пучка волокон, а также сигналы 82 с задержкой по времени, индуцированной статическим и динамическим крутящим моментом, измеренные путем изменения ширины входного импульса источника света, как показано на фиг.5, согласно одному варианту осуществления изобретения. Стробирование источника света настроено по времени для захвата сигналов статического и динамического крутящего момента.
На фиг.7 показана схема делителя 90 или 22 на основе разветвленного пучка волокон, показанного на фиг.2, для доставки источника 12 света на множественные зонды отражения согласно одному варианту осуществления изобретения. Здесь, разделенные оптические волокна 92 можно устанавливать в виде матрицы; и поэтому единый лазерный источник 12 света можно разделить на много отдельных зондов 94 передачи, обеспечивая более высокое пространственное разрешение измерения. Поэтому измерительная система 10 пригодна для применений, которые требуют многоточечного и мультипараметрического мониторинга с высоким пространственным разрешением, например ступеней HP, IP и LP паровой турбины или турбомашинной системы в целом.
Согласно фиг.2, волоконно-оптическая измерительная система 10 применяет дифференциальное одновременное мультипараметрическое измерение либо с тремя отдельными и различными длинами волны лазерного света, либо широкополосным светодиодом. Волоконно-оптическая измерительная система 10 может применяться в оперативных применениях турбомашинной системы, включающих в себя, без ограничения, паровую турбину, мониторинг и контроль состояния механической деформации вала ротора (статического и динамического крутящего момента, изгибной вибрации ротора и т.д.) для повышения эффективности генерации энергии. Волоконно-оптическая измерительная система 10 более устойчива и надежна для применений измерения рабочего состояния вращающейся система, чем известные температурно-чувствительные датчики стационарной близости, магнитострикционные и магнитоупругие датчики. Волоконно-оптическая измерительная система 10, например, может работать при температурах около 1200°F, более высоких, чем те, при которых работают многие известные традиционные устройства и системы измерения крутящего момента, поскольку измерительный зонд, т.е. волокна плюс кожух, могут выдерживать высокотемпературный режим работы.
На фиг.8 показана схема зонда 100 отражения 1×2 с конфигурацией волокон 6x1 для доставки света и приема отраженного света от поверхности 24 вала, согласно одному варианту осуществления изобретения, который пригоден для использования в волоконно-оптической измерительной системе 10 для реализации высокотемпературных зондов 26, 28, 30 и 32 на основе пучка волокон для измерения отражения, показанных на фиг.2, в отличие от структур волоконной брэгговской решетки или долгопериодической решетки, что делает систему 10 идеальной для регистрации статических и/или динамических параметров. Центральное волокно 102 используется для доставки лазерного пучка от оптического делителя, и шесть коаксиальных волокон 104 используются для подачи сигнала рассеяния от поверхности 24 вала ротора с кодировкой на один элемент матрицы светочувствительного детектирования 34. Единая разветвленная структура коаксиального пучка волокон 6x1 преимущественно заменяет акселерометр в качестве зонда для измерения изгибной вибрации ротора для обеспечения одновременного обнаружения крутящего момента и торсионных и изгибных мод вибрации с помощью единого измерительного прибора. Разветвленная структура коаксиального пучка волокон 6x1 преимущественно эффективно разрешает требования мультиплексирования при значительном снижении стоимости системы по сравнению с традиционными системами измерения крутящего момента.
Зонд 100 для обнаружения отражения может иметь конфигурацию в виде одной из многих конфигураций волокон, например случайную, половинчатую, коаксиальную и другие, для доставки света и приема отраженного света от поверхности 24 вала согласно одному варианту осуществления изобретения. Такой зонд 100 для обнаружения отражения обеспечивает решение для обнаружения статического и/или динамического крутящего момента, а также для обнаружения торсионной и изгибной вибрации ступени LP, IP и HP паровой турбины. Такой зонд 100 для обнаружения отражения пригоден для мультипараметрической и многоточечной диагностики и прогнозирования рабочего состояния турбомашинной системы.
Описанные здесь источник света с множественными длинами волны и способы и системы измерения фазового сдвига на основе отражение не зависят от абсолютного отражения и эффективности рассеяния поверхность вала ротора. Эти способы и системы, напротив, основаны на кодированных сигнатурах отражения, растущей(их) задержке(ах) по времени сигнала, индуцированного контрастностью, и фазовых сдвигах, а также на частотных сигнатурах. Эти распознавание и дифференцирование шаблонов сигнатуры значительно ослабляют флуктуацию отражения, индуцированную дефектами поверхности вала, включающими в себя, без ограничения, коррозию/эрозию, масло или воду, что недостижимо с использованием известных способов и систем измерения крутящего момента. Кроме того, описанные здесь структуры высокотемпературного зонда отражения на основе упакованного пучка волокон невосприимчивы к внутренним температурным флуктуациям паровой турбины, которые в противном случае влияют на точность измерения крутящего момента, поскольку флуктуация отражения, индуцированная тепловым излучением, пренебрежимо мала при T<1200°F.
Описанные здесь структуры высокотемпературного зонда на основе упакованного пучка волокон также могут использовать случайную, половинчатую и коаксиальную конфигурации волокна, чтобы просветы вала от около 1 мм до около 10 мм могли обеспечивать максимальную гибкость и устойчивость и ослаблять изгибную вибрацию ротора и тепловое расширение, а также механическую деформацию вала, зависящую от температуры и давления. Сердцевина волокна в каждом пучке волокон, согласно одному варианту осуществления, имеет диаметр в пределах от 50 микрон в диаметре до нескольких сот микрон в диаметре с поверхностью, металлизированной Ni, Ti или Au для применений T>1000°F, или полиимидной поверхностью для применений T<800°F. Эти волокна связаны друг с другом и загерметизированы в металлической трубке металлическим адгезивом, выдерживающим 2000°F.
На фиг.9 показано обнаружение сигнала от зонда 104 для обнаружения отражения на расстоянии d 106 от поверхности 24 вала и его соответствующие рабочие точки 108 или 110 согласно одному варианту осуществления изобретения. Зонд отражения может быть установлен на двух типичных расстояниях от поверхности вала, причем первое рабочее расстояние 108 обеспечивает высокую чувствительность на малом расстоянии, тогда как второе рабочее расстояние 110 позволяет располагать измерительный зонд дальше от поверхности вала. Эти рабочие расстояния позволяют обнаруживать флуктуирующее динамическое смещение изгибной вибрации, теплового расширения и нелинейных отказов вала.
На фиг.10 показаны уровни отражения в разных рабочих точках для зонда для обнаружения крутящего момента, показанного на фиг.9.
На фиг.11 показаны способы кодирования поверхности 24 вала через каждые 90°, включающего в себя линии 112 в виде клиновидных канавок и прямые линии 114 согласно конкретным вариантам осуществления изобретения, которые пригодны для реализации оптического кодирования 38, изображенного на фиг.2. Эти кодеры могут быть распределены по внешней поверхности вала под любым из определенных углов из 360°, 180°, 90°, 60°, 30° и т.д.
На фиг.12 показана более подробная схема трех шаблонов 120, 122, 124 кодирования поверхности вала, пригодных для реализации линий 112 в виде клиновидных канавок и прямых линий 114, показанных на фиг.11. Клиновидная канавка может быть создана в процессе лазерной микромашинной обработки или лазерной маркировки непосредственно на поверхности вала; два другие способа также могут быть основаны на процессе лазерной микромашинной обработки или маркировки для создания либо одной прямой линии, либо периодических и апериодических частотно-модулированных прямых линий на листе стали CrMoV для секции HP/IP и стали NiCrMoV для секции LP. В области соединений для измерений крутящего момента секции, диаметр вала обычно составляет от 10” до 30” в диаметре. Необходимый размер листа кодирования должен быть 10 мм (длина) × 5 мм (ширина) × 0.1 мм (толщина), где секция толщины металлического листа должна создавать значительное изменение сигнатуры сигнала отражения.
На фиг.13 показаны сигналы измерения крутящего момента из разных шаблонов кодирования, включающие в себя сигналы 130 измерения от поверхности вала с кодировкой периодическими или частотно-модулированными прямыми линиями и сигналы 132 измерения от поверхность вала с кодировкой клиновидными канавками, оба в пределах одного цикла в задней рабочей точке 110 на фиг.10. В частотной области собственная частота вращения вала должна составлять 30-60 Гц для вращающейся системы 1800-3600 об/мин. Для оптического кодирования из каждой четвертной секции четыре метки кодирования обычно имеют постоянные задержки по времени между ними. Статический крутящий момент, переходный крутящий момент и вибрации могут приводить к изменению этих задержек по времени с течением времени в зависимости от оперативных рабочих состояний турбомашинной системы.
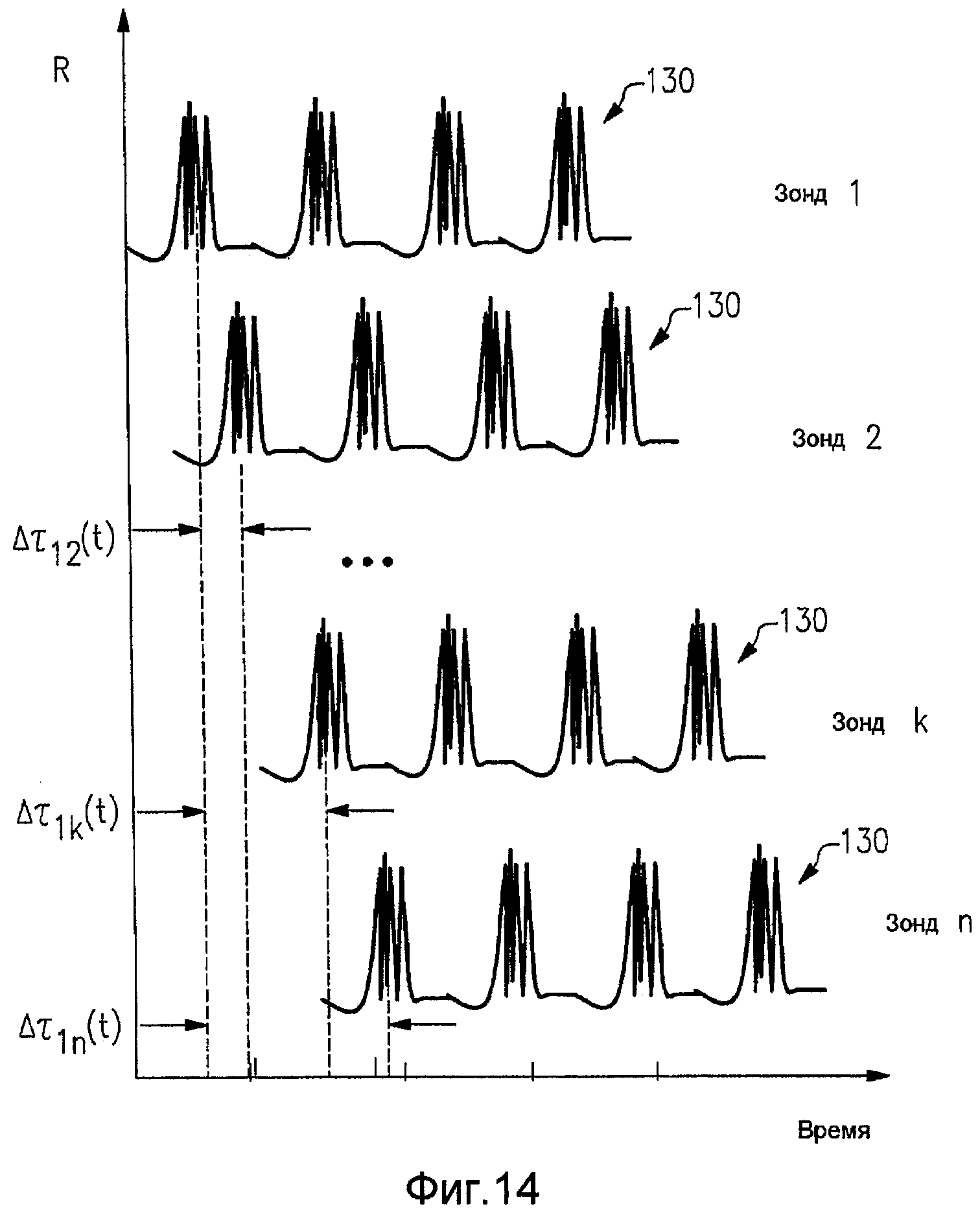
На фиг.14 показаны сигналы 130 с задержкой по времени, связанные с разными зондами отражения в соответствии с поверхностью вала с кодировкой периодическими или частотно-модулированными прямыми линиями в пределах одного цикла для обнаружения статического и динамического крутящего момента.
На фиг.15 показаны сигналы 132 статического и динамического крутящего момента, связанные с разными зондами в соответствии с поверхностью вала с кодировкой клиновидными канавками в пределах одного цикла.
На фиг.16 показано графическое представление сигнала 134 обнаружения динамического крутящего момента на основании задержки по времени между первым зондом и k-м зондом как функции времени из фиг.14 и 15, согласно одному варианту осуществления изобретения. Здесь средний сигнал представляет значение статического крутящего момента.
На фиг.17 показано графическое представление отраженного сигнала 140 от поверхности вала с кодировкой периодическими или частотно-модулированными прямыми линиями 142 согласно одному варианту осуществления изобретения. Измеренный сигнал отражения 140 от периодических прямых линий демонстрирует, как сигнатура сигнала отражения периодически модулируется способом оптического кодирования. Для измерения статического крутящего момента, действующего на вал, предпочтительно кодирование частотно-модулированными прямыми линиями.
На фиг.18 показано графическое представление измеренного крутящего момента и соответствующего угла скручивания согласно одному варианту осуществления изобретения. Принципы, описанные выше со ссылкой на фиг.1-18, которые также можно применять, как описано ниже со ссылкой на фиг.19-24, для мониторинга изгибных и торсионных (линейных и нелинейных) вибраций валов турбины-генератора, которые могут порождать переходные колебания, которые превышают уровни напряжения устойчивого состояния в условиях полной нагрузки.
Волоконно-оптические мультипараметрические измерительные приборы турбомашинной системы, более подробно описанные ниже, полезны для мониторинга изгибных и торсионных вибраций роторов и валов в разных секциях, которые могут порождать переходные колебания, которые превышают уровни напряжения устойчивого состояния в условиях полной нагрузки, как указано выше. Такие переходные нелинейные колебания могут приводить к износу подшипников, изгибной деформации валов и высокой крутящей нагрузке, что угрожает устойчивости системы генерации энергии на основе паровой турбины, помимо прочего. Традиционная технология измерения вибрации, например, с использованием акселерометров, тензодатчиков, зондов близости и тахометров может ограничиваться либо суровыми условиями среды паровой турбины, включающими в себя, без ограничения, температуру, давление, пар или влажность и высокий расход, либо их природой как контактных и электрических измерительных устройств. Варианты осуществления волоконно-оптической системы измерения крутящего момента и вибрации, описанные ниже со ссылкой на фиг.18-23, предназначены для диагностики и прогнозирования отказов для турбомашинной системы, которые, преимущественно, нечувствительны к температуре и не подвержены электромагнитным помехам.
На фиг.19 показан один участок волоконно-оптической системы 210 мониторинга вибрации для паровой турбины 212 согласно одному варианту осуществления изобретения. Механизм измерения реализован в виде разветвленных пучков 214 волокон, которые пропускают свет с множественными длинами волны, например лазерные пучки, к поверхности 216 вала с оптической кодировкой и также принимают динамические сигналы отражения от поверхности 216 вала к высокоскоростной фотодетекторной матрице 218. Источник падающего света периодически модулируются; и принятые динамические сигналы отражения от поверхности 216 вала с оптической кодировкой обнаруживаются высокоскоростной фотодетекторной матрицы 218. Обнаруженные сигналы отражения анализируются многоканальной системой сбора данных согласно одному варианту осуществления изобретения.
Изгибные и торсионные вибрации получаются на основании спектрального анализа динамических сигналов отражения с использованием метода быстрого преобразования Фурье в соответствии с основными собственными частотами вращения вала в гармонические компоненты более высокого порядка. В частности, переходные торсионные моды, которые соответствуют периодам натяжения с относительно высокими амплитудами, можно идентифицировать мгновенными высокочастотными колебаниями, подробно описанными ниже.
Описанные здесь способы и приборы измерения вибрации также можно использовать для измерения динамики переходного нелинейного крутящего момента на валу, как описано выше, и которая может быть связана с отказами линии передачи. Признаки описанных здесь техник измерения вибрации относятся к исключению любых контактных требований и нечувствительности к влажности, давлению и динамике потока топлива/газа. Другие признаки включают в себя, без ограничения, одновременное обнаружение характеристик вибрации и соответствующих нелинейных эффектов, связанных с диагностикой и прогнозированием отказов турбомашинной системы.
Существенное преимущество, обеспеченное описанными здесь техниками и топологиями вибрационной системы, относится к распределению множественных измерительных зондов в турбомашинной системе, которая может работать при температурах до около 1200°F.
Хотя конкретные варианты осуществления описаны здесь для систем и способов реализации обнаружения вибрации, поверхность вала с оптической кодировкой, описанная выше для измерения статического и динамического крутящего момента, может быть не нужна для обнаружения характеристик изгибной вибрации, хотя и нужна для обнаружения характеристики торсионной вибрации. Дело в том, что сигнал измерения для вибрации анализируется в частотной области путем наблюдения основной частотной моды вала в гармонические компоненты более высокого порядка, как указано выше.
На фиг.20 показана техника передачи лазерных световых сигналов 220 через пучок 226 оптических волокон и приема множественных отраженных сигналов 224 в ответ на передачу сигналов, согласно одному варианту осуществления изобретения. Устройства и механизмы, описанные на фиг.20, образуют многоточечную, неинтрузивную оперативную систему мониторинга и диагностики изгибной/торсионной вибрации, которая может обнаруживать диапазон частот колебаний из основных собственных частот вращения вала в гармонические компоненты более высокого порядка, которые являются общей формой дефекта из вала паровой турбины-генератора. Полученная система обеспечивает анализ сигнала динамического крутящего момента методом быстрого преобразования Фурье (БПФ) из измеренного динамического отражения от поверхности вала с оптической кодировкой, как описано выше. Измерительное устройство содержит оптический делитель 226 на основе разветвленных пучков волокон, которые проводят лазерные пучки с множественными длинами волны к поверхности вала, и зонды 228 для обнаружения отражения принимают динамические сигналы отражения от поверхности вала и передают на фотодетекторную матрицу 230, согласно одному варианту осуществления. Падающие лазерные пучки периодически модулируются из непрерывной волны в кГц квадратную волну; и принятые динамические сигналы отражения обнаруживаются высокоскоростной фотодетекторной матрицей 230. Затем обнаруженные сигналы анализируются многоканальной системой сбора данных согласно одному варианту осуществления.
В нормальных условиях работы вала, которые соответствуют состоянию устойчивого равновесия, наблюдаемый низкочастотный случайный вибрационный сигнал, хотя и малый, может быть результатом трения при движении между ротором и статором, искривления валов, пробуксовки соединений и других случайных сил. Изгибные моды вибрации обусловлены, в основном, механической разъюстировкой вращающейся системы, разбалансировкой, распределением температуры и предварительным изгибом; тогда как торсионная вибрация может быть следствием динамики крутящего момента, обусловленной изменением состояния нагрузки вала, и переходных изменений скорости вращения. Внешние неизвестные силы возбуждения, переходное переключение мощности и нестабильная работа системы в целом также могут порождать переходные нелинейные моды вибрации, которые могут иметь высокие амплитуды вибрации.
На фиг.21 показаны принципы обнаружения сигнала динамической изгибной вибрации на основе отражения согласно одному варианту осуществления изобретения. Поверхность вала с кодировкой, например, рассмотренная выше, не требуется для измерения случайных и изгибных вибраций, поскольку спектральный анализ в частотной области из динамического отражения можно сам по себе использовать для определения состояния нормальной нагрузки, как указано выше.
На фиг.22 показана техника обнаружения многоточечного сигнала динамической торсионной вибрации на основе отражения согласно одному варианту осуществления изобретения. Желательно, чтобы переходная торсионная вибрация, которая связана с динамическим крутящим моментом на валу, использовала поверхность вала с кодировкой, как описано выше, согласно одному варианту осуществления изобретения. Динамический крутящий момент определяется фазовым сдвигом сигнатуры кодирования во временной области, тогда как торсионная вибрация порождает высокочастотные гармонические компоненты в частотной области, которые являются интегралом основной собственной частоты вибрации вала, как показано на фиг.23, где представлен многоточечный сигнал динамической торсионной вибрации на основе отражения во временной области согласно одному варианту осуществления изобретения; и на фиг.24, где представлен многоточечный спектр динамической торсионная вибрация на основе отражения от зонда согласно одному варианту осуществления изобретения. Большая ширина полосы, достижимая с использованием описанных здесь техник измерения вибрации в частотном области, позволяет одновременно идентифицировать вышеизложенные моды вибрации по спектрам мощности и фазы.
Описанные здесь принципы измерения вибрации можно реализовать для обеспечения одновременного мониторинга явлений постоянной и переходной изгибной и торсионной вибрации из основной собственной частоты вращения вала в гармонические компоненты более высоких порядков, как указано выше. В частности, переходные нелинейные торсионные моды, которые соответствуют периодам натяжения с относительно высокими амплитудами, можно идентифицировать мгновенными и короткопериодическими высокочастотными колебаниями, которые можно использовать для идентификации переходного дефекта линии передачи. Такую автоматизированную технику мониторинга можно применять, например, на ступенях разного давления паровой турбины, включая, без ограничения, многороторные, или валах на энергетических установках, где поломка вала может быть вызвана переходной и нелинейной изгибной и торсионной вибрацией.
Описанные здесь принципы мультиплексирования обнаружения мультипараметрической торсионной вибрации на основе пучка волокон, хотя и полезны для диагностики отказов ротора или вала, также полезны для одновременного измерения механической деформации вала под действием нагрева и переходного изменения скорости вращения вала, а также переходных нелинейных характеристик вибрации.
Преимущества, обеспеченные системой измерения вибрации, имеющей описанные здесь признаки, включают в себя без ограничения:
1) волоконно-оптическая система мониторинга состояния вибрации вала турбомашинной системы нечувствительна к электромагнитным помехам;
2) систему можно устанавливать в суровых условиях окружающей среды, обусловленных температурой, давлением, влажностью и т.д.;
3) система одновременно обеспечивает множественные моды вибрации (поперечную, изгибную и торсионную) путем измерения динамического отражения либо от поверхности вала с оптической кодировкой, либо от голой поверхности вала;
4) система не имеет движущихся частей, а также не имеет требований к оптической юстировке;
5) система обнаруживает динамические сигналы отражения от поверхности вала с помощью оптического(их) делителя(ей) на основе пучка волокон, например, оптического(их) делителя(ей) 1x2, 1x4 и 1x8, что позволяет осуществлять одновременное многоточечное измерение вибрации с помощью единого инструмента;
6) волоконно-оптическая измерительная система использует зонд для измерения отражения, построенный с применением трубки из металла с высокой температурой плавления, низким тепловым расширением, устойчивого к окислению (т.е. ковара, инвара, инконеля или инколоя и т.д.); высокотемпературного металлического адгезива в качестве связующего материала; одного волокна для доставки пучка падающего света (т.е. лазерного), и множественных (т.е. 6) волокон с шестиугольной конфигурацией для приема динамического сигнала отражения согласно одному варианту осуществления;
7) система, сконфигурированная так, что принятый сигнал отражения может передаваться на фотодетекторную матрицу оптическим зондом отражения (т.е. оптическим объединителем 1x2, 1x4 или 1x8), который упакован в кабель в стальной гофрированной оболочке согласно одному варианту осуществления;
8) использование измерительного зонда, который нечувствителен к температуре, поскольку отраженный сигнал, передаваемый по оптическому волокну, ограничен узким спектральным диапазоном с большой длиной волны отсечки менее 2 мкм, что делает его нечувствительным к излучению большой длины волны; и также флуктуация отражения, индуцированная тепловым излучением, пренебрежимо мала при T<1200°F;
9) использование измерительного зонда, поверхность которого покрыта тонкой пленкой гидрофобной высокотемпературной керамики на основе оксида алюминия согласно одному варианту осуществления, благодаря чему амплитуда динамического сигнала отражения не зависит от влажности;
10) использование волоконно-оптических измерительных зондов, расположенных в виде матрицы, позволяет распределять единый источник света на большое количество отдельных измерительных зондов, обеспечивая более высокое пространственное разрешение измерения, что является идеальным для применений многоточечного измерения, например, для мониторинга состояния вибрации вала паровой турбины от ступени высокого давления до ступени низкого давления;
11) использование источника света с множественными длинами волны для того, чтобы измерение динамического отраженного сигнала было нечувствительно к оптическому поглощению, обусловленному влажностью, минеральным маслом и грязью, путем дифференцирования измерений отражения одновременно для разных длин волны;
12) использование обработки сигнала измерения, которая включает в себя технологию фильтрации, которая позволяет восстанавливать огибающую шумоподавления и несущую для обеспечения кросс-корреляционной функции для обеспечения оперативного анализа и мониторинга статического и динамического состояния вибрации;
13) использование способа предсказательной диагностики и прогнозирования на основании анализа нелинейной переходной вибрации; и
14) использование практического способа мониторинга юстировки подшипников, ротора и вала турбомашины путем одновременного наблюдения амплитуд и мод нелинейной вибрации.
Хотя здесь проиллюстрированы и описаны лишь некоторые признаки изобретения, специалисты в данной области техники могут предложить многочисленные модификации и изменения. Поэтому следует понимать, что формула изобретения призвана охватывать все подобные модификации и изменения, отвечающие сущности изобретения.
Список элементов
10 Волоконно-оптическая система
измерения крутящего момента
12 Многоцветный источник освещения
14 Область поверхности вала
16 Область поверхности вала
18 Область поверхности вала
20 Область поверхности вала
22 Делитель на основе разветвленного пучка волокон
24 Поверхность вала турбомашины
26 зонд отражения
28 Зонд отражения
30 Зонд отражения
32 Зонд отражения
34 Матрица светочувствительных детекторов
36 Блок обработки сигнала
38 Механизм кодирования поверхности вала
40 Угловое смещение
42 Разветвленный пучок волокон
44 Разветвленный пучок волокон
48 Исходный временной сигнал
50 Сигнал с задержкой по времени
64 Блок кросс-корреляции
66 Блок фильтра низких частот
68 Блок БПФ
70 Схема кодирования и обработки сигнала
72 Блок уточненной оценки фазового сдвига
74 Блок оценки фазового сдвига высокой точности
76 Блок грубой оценки фазового сдвига
80 Набор исходных сигналов
82 Сигналы с задержкой по времени, обусловленной крутящим моментом
90 Делитель на основе разветвленного пучка волокон
92 Оптические волокна
94 Зонды передачи
100 Зонд отражения
102 Центральное волокно
104 Коаксиальные волокна
106 Рабочее расстояние
108 Рабочая точка рабочего расстояния
110 Рабочая точка рабочего расстояния
112 Клиновидные канавки
114 Прямолинейные канавки
120 Шаблон кодирования поверхности клиновидными канавками
122 Шаблон кодирования множественными периодическими линиями
124 Шаблон кодирования одной прямой линией
130 Сигнал измерения крутящего момента от поверхности вала, кодированной прямой линией
132 Сигнал измерения крутящего момента от поверхности вала, кодированной клиновидными канавками
134 Сигнал обнаружения динамического крутящего момента на основе задержки по времени
140 Отражающийся сигнал от поверхности вала с кодировкой периодическими или частотно-модулированными прямыми линиями
142 Поверхность вала, кодированная периодическими линиями
200 Волоконно-оптические приборы измерения крутящего момента и вибрации для турбомашинной системы
202 Паровая турбина
204 Генератор
206 Силовой редуктор
208 Газовая турбина
210 Волоконно-оптическая система мониторинга вибрации
212 Паровая турбина
214 Разветвленные пучки волокон
216 Поверхность вала с оптической кодировкой
220 Лазерные световые сигналы
218 Матрица фотодетекторов
224 Множественные отражающиеся сигналы
226 Оптический делитель пучка волокон
230 Матрица фотодетекторов
Реферат
Система содержит источник света для передачи света на поверхность вала через множество пучков оптических волокон, расположенных во множестве местоположений вблизи поверхности в по существу аксиальном направлении между концами по меньшей мере одного вала; высокотемпературный зонд отражения на основе пучка волокон для обнаружения света, отраженного от поверхности вала, механизм измерения для определения крутящего момента или вибрации на валу. Вал содержит механизм кодирования, выполненный посредством измененной текстуры в виде клиновидной канавки на поверхности вала, путем изменения глубины поверхности. Глубина клиновидной канавки обеспечивает сигнал передней рабочей точки и сигнал задней рабочей точки таким образом, что соответствующая временная задержка может быть обнаружена из любого из двух местоположений клиновидной канавки для определения значения угла закручивания вала путем дифференцирования их характеристик шаблона отражения в течение каждого цикла вращения. Технический результат - повышение надежности измерения статического и динамического крутящего момента, линейных и нелинейных вибраций на вращающихся валах. 2 н. и 21 з.п. ф-лы, 24 ил.
Формула
передают свет от единственного источника света во множество местоположений на поверхности вала турбомашинной системы через множество пучков оптических волокон, причем множество местоположений на поверхности вала расположено в по существу аксиальном направлении между концами по меньшей мере одного вала, таким образом, что множество динамических отраженных световых сигналов принимается из множества местоположений на поверхности вала по меньшей мере одним высокотемпературным зондом отражения на основе пучка волокон, пока по меньшей мере один вал вращается, при этом по меньшей мере одно из множества мест на поверхности вала имеет измененную текстуру, определенную клиновидной канавкой, нанесенной на поверхность вала, путем изменения глубины поверхности в желаемых областях поверхности вала относительно других областей поверхности вала, и по меньшей мере одно другое из множества местоположений на поверхности вала не включает в себя измененную текстуру, при этом глубина клиновидной канавки обеспечивает сигнал передней рабочей точки и сигнал задней рабочей точки таким образом, что соответствующая временная задержка может быть обнаружена из любого из двух местоположений клиновидной канавки для определения значения угла закручивания вала путем дифференцирования их характеристик шаблона отражения в течение каждого цикла вращения; и
определяют по меньшей мере одну характеристику крутящего момента вала турбомашинной системы, основываясь на по меньшей мере одной характеристике динамических отраженных световых сигналов, принятых из по меньшей мере одного из местоположений на поверхности вала;
определяют по меньшей мере одну характеристику вибрации вала турбомашинной системы, основываясь на по меньшей мере одной характеристике динамических отраженных световых сигналов, принятых из по меньшей мере одного другого из местоположений на поверхности вала.
определение значения угла закручивания вала, основываясь на множестве отраженных характеристик сигнала; и
определение характеристики крутящего момента вала турбомашинной системы, основываясь на значении угла закручивания вала, соответствующем временной задержке или фазе смещения путем дифференцирования каких-либо двух характеристик отражения.
измерение посредством механизма фотодетектирования, когда разница между характеристиками шаблона отражения отраженных световых сигналов, обнаруженных посредством множества зондов отражения на желаемой нужной длине волны, превышает желаемую пороговую величину;
определение дифференциальных временных задержек, связанных с отраженной характеристикой сигнала; и
определение значения угла закручивания вала, основываясь на отраженном сигнале дифференциальных временных задержек из их распознавания шаблонов отражения.
определение основной частоты вибрации вала турбомашинной системы и желаемого количества частот вибрации гармоники высшего порядка вала турбомашинной системы, основываясь на множестве принятых отраженных сигналов; и
определение торсионной вибрации вала турбомашинной системы, основываясь на основной частоте вибрации вала и частотах гармоники высшего порядка режима вибрации вала.
определение основной частоты вибрации вала турбомашинной системы и желаемого количества частот режима вибрации гармоники высшего порядка вала турбомашинной системы, основываясь на множестве принятых отраженных сигналов; и
определение изгибной вибрации вала турбомашинной системы, основываясь на основной частоте вибрации вала и частотах гармоники высшего порядка режима вибрации вала.
единственный источник света, сконфигурированный для передачи света на поверхность по меньшей мере одного вала турбомашинной системы через множество пучков оптических волокон, расположенных во множестве местоположений вблизи поверхности по меньшей мере одного вала, причем множество местоположений вместе расположены в по существу аксиальном направлении между концами по меньшей мере одного вала;
по меньшей мере один высокотемпературный зонд отражения на основе пучка волокон, сконфигурированный для обнаружения динамического света, отраженного от поверхности по меньшей мере одного вала турбомашинной системы в ответ на переданный свет во время вращения по меньшей мере одного вала турбомашинной системы и для генерирования динамических отраженных световых сигналов; и
механизм измерения, сконфигурированный для определения крутящего момента или вибрации на по меньшей мере одном валу турбомашинной системы в ответ на характеристики динамического отраженного светового сигнала или распознавание шаблона на основании обработки сигнала во временной области и в частотной области, при этом
турбомашинный вал содержит механизм кодирования, выполненный посредством измененной текстуры, определенной посредством клиновидной канавки, нанесенной на поверхность вала, путем изменения глубины поверхности в желаемых областях поверхности вала относительно других областей поверхности вала на по меньшей мере одном местоположении по меньшей мере одного вала вблизи соответствующего местоположения пучка волокон, но не всех местоположений по меньшей мере одного вала вблизи соответствующих местоположений пучка волокон, при этом глубина клиновидной канавки обеспечивает сигнал передней рабочей точки и сигнал задней рабочей точки таким образом, что соответствующая временная задержка может быть обнаружена из любого из двух местоположений клиновидной канавки для определения значения угла закручивания вала путем дифференцирования их характеристик шаблона отражения в течение каждого цикла вращения.
Комментарии