Составной детектор с трансверсальными катушками - RU2758925C1
Код документа: RU2758925C1
Чертежи










Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к обнаружению заданных объектов и более конкретно к обнаружению взрывных устройств, таких как закопанные в землю наземные мины (фугасы).
Уровень техники
Для обнаружения взрывных устройств используют составные детекторы (англ. «dual detector»), содержащие детекторные головки, вмещающие индуктивный датчик и георадар, поскольку эти технологии дополняют друг друга в отношении типов материалов, подлежащих обнаружению (металлы для индуктивного датчика и разность диэлектрических постоянных материалов и относительное положение для радара).
Однако на практике Заявитель обнаружил, что грунт не является нейтральным с точки зрения электромагнетизма и, следовательно, может нарушать связь между катушками. Кроме того, грунт редко намагничен равномерно, таким образом, что при зондировании оператором с помощью детектора сигнал детектора может изменяться только из-за присутствия металлического лома или даже из-за состава грунта, инициируя ложные тревоги.
Кроме того, операторы, использующие эти детекторы, могут быть недостаточно обучены и неправильно держать детектор или осуществлять неправильные сканирующие движения. При этом детекторная головка может образовывать латеральный угол с землей таким образом, что одна из катушек находится ближе к земле, чем другие, что создает сильную модуляцию сигнала и, таким образом, риск инициирования ложных тревог. И даже в том случае, когда оператор хорошо обучен и пытается удерживать детекторную головку по существу параллельно земле в любой момент сканирующего движения, он не может локально изменить ее наклон с учетом неровности грунта.
Чтобы ослабить эти недостатки, изготовители стремятся снизить чувствительность таких детекторов. Однако при этом создается риск потери способности к обнаружению погруженных в грунт целевых объектов и таким образом подвергания опасности жизни операторов.
В патентном документе US 3758849 раскрыт способ обнаружения целевого объекта с помощью детектора, содержащего детекторную головку, причем детекторная головка содержит индуктивный датчик, содержащий отдельные передающую и приемную катушки. Передающая и приемная катушки образуют зону связи.
Однако детектор является неподвижным, а перемещается перед ним в направлении сканирования подлежащий сканированию объект. Таким образом, детектор не осуществляет сканирования грунта. Кроме того, речь не идет о составном детекторе, т.е. детекторе, который для повышения эффективности обнаружения содержит дополнительные средства детектирования, в дополнении к индуктивному датчику.
В патентном документе US 9733353 раскрыт детектор, содержащий один контур обнаружения.
В документе WO 2012/024133 раскрыт детектор, содержащий индуктивный датчик, образованный приемной катушкой и передающей катушкой, расположенными таким образом, чтобы образовалась поперечная планка, и V-образные антенны радара.
Сущность изобретения
Таким образом, задачей настоящего изобретения является предложение составного детектора, содержащего детекторную головку, вмещающую индуктивный датчик и другой датчик, такой как георадар, который может уменьшить число ложных тревог, могущих возникать при сканировании грунта с помощью детектора, обладая при этом более высокой чувствительностью.
Для этого в соответствии с настоящим изобретением предложен способ обнаружения целевого объекта с помощью составного детектора, содержащего детекторную головку, причем детекторная головка содержит индуктивный датчик, содержащий отдельные передающую и приемную катушки, каждая из которых образует контур, причем контур передающей катушки по меньшей мере частично перекрывает контур приемной катушки таким образом, чтобы сформировать зону связи, вытянутую в первом продольном направлении, определяющем первую ось. Детектор перемещают в направлении сканирования, определяющем ось сканирования, таким образом, что при перемещении детекторная головка ориентирована так, что первая ось зоны связи по существу параллельна оси сканирования.
В соответствии со вторым аспектом изобретения, предложен составной детектор, который может быть использован в описанном выше способе поиска, содержащий детекторную головку, закрепленную на ручке с помощью механического соединения, причем детекторная головка содержит:
- пластину, и
- индуктивный датчик, закрепленный на пластине и содержащий отдельные передающую и приемную катушки, каждая из которых образует контур, причем контур передающей катушки по меньшей мере частично перекрывает контур приемной катушки таким образом, что образуется зона связи, вытянутая в первом продольном направлении, определяющем первую ось. Кроме того, ручка проходит в плоскости, перпендикулярной пластине, а первая ось зоны связи трансверсальна указанной плоскости.
Ниже описаны некоторые предпочтительные, но не ограничивающие, признаки описанного выше составного детектора, взятые по отдельности или в сочетании:
- каждый из контуров по существу вытянут во втором продольном направлении, определяющем вторую ось, причем первая и вторая оси по существу параллельны друг другу;
- детекторная головка вытянута и проходит вдоль первой оси;
- передающая и приемная катушки содержат проволочные спирали, причем передающая катушка содержит большее число витков, чем приемная катушка;
- передающая и приемная катушки напечатаны непосредственно на пластине, причем пластина образует печатную плату;
- передающая и приемная катушки являются униполярными;
- механическое соединение закреплено с возможностью вращения вокруг третьей оси, причем третья ось заключена в плоскости.
- третья ось трансверсальна первой оси.
- механическое соединение содержит поворотное соединение, соединение типа жесткой заделки или шаровую цапфу;
- детектор дополнительно содержит рукоять, выполненную с возможностью захвата оператором, причем эта рукоять проходит в плоскости;
- детектор дополнительно содержит георадар, содержащий передающую и приемную антенны, каждая из которых расположена в центре одного из контуров передающей и приемной катушек;
- передающая и приемная антенна являются антеннами следующих типов: четырехгребневая рупорная антенна, конусная антенна «бабочка», прямоугольная конусная антенна «бабочка», антенна «спираль Архимеда», антенна «логарифмическая спираль», антенна Вивальди, антенна «растянутая логарифмическая спираль»;
- передающая и приемная антенны изготовлены по меньшей мере частично из никеля или хрома;
- центральная часть передающей и приемной антенн изготовлена из меди и содержит на поверхности защитный слой, выполненный из золота;
- толщина передающей и приемной антенн меньше одного микрона и предпочтительно равна приблизительно 200 нм.
Краткое описание чертежей
Другие отличительные признаки, задачи и преимущества настоящего изобретения станут ясны из подробного описания, которое будет приведено ниже со ссылками на прилагаемые чертежи, приведенные в качестве неограничивающих примеров.
На фиг. 1 представлен вид в перспективе детектора в соответствии с одним из вариантов осуществления.
На фиг. 2 представлен вид сверху, покомпонентный и в перспективе, детекторной головки детектора по фиг. 1.
На фиг. 3 представлен вид снизу, покомпонентный и в перспективе, детекторной головки детектора по фиг. 1.
На фиг. 4а схематично представлена ориентация передающей и приемной катушек известного детектора в зависимости от направления сканирования направо/налево.
На фиг. 4b схематично представлена ориентация передающей и приемной катушек детектора в соответствии с изобретением в зависимости от направления сканирования направо/налево.
На фиг. 5а и 5b представлена амплитуда сигнала, измеренная для известного детектора и детектора в соответствии с изобретением соответственно, когда детектор находится в контакте с намагниченным грунтом, на который помещен стальной шарик, и который детектор исследует сканирующим движением направо/налево.
На фиг. 6а и 6b представлена амплитуда сигнала, измеренная для известного детектора и детектора в соответствии с изобретением соответственно, когда детектор находится в контакте с намагниченным грунтом, в который было закопано имитирующее устройство типа LI-11 и который детектор исследует сканирующим движением направо/налево.
На фиг. 7а и 7b представлена амплитуда сигнала, измеренная для известного детектора и детектора в соответствии с изобретением соответственно, когда детектор находится в контакте с намагниченным грунтом, в который было закопано имитирующее устройство типа РМА-2, и который детектор исследует сканирующим движением направо/налево.
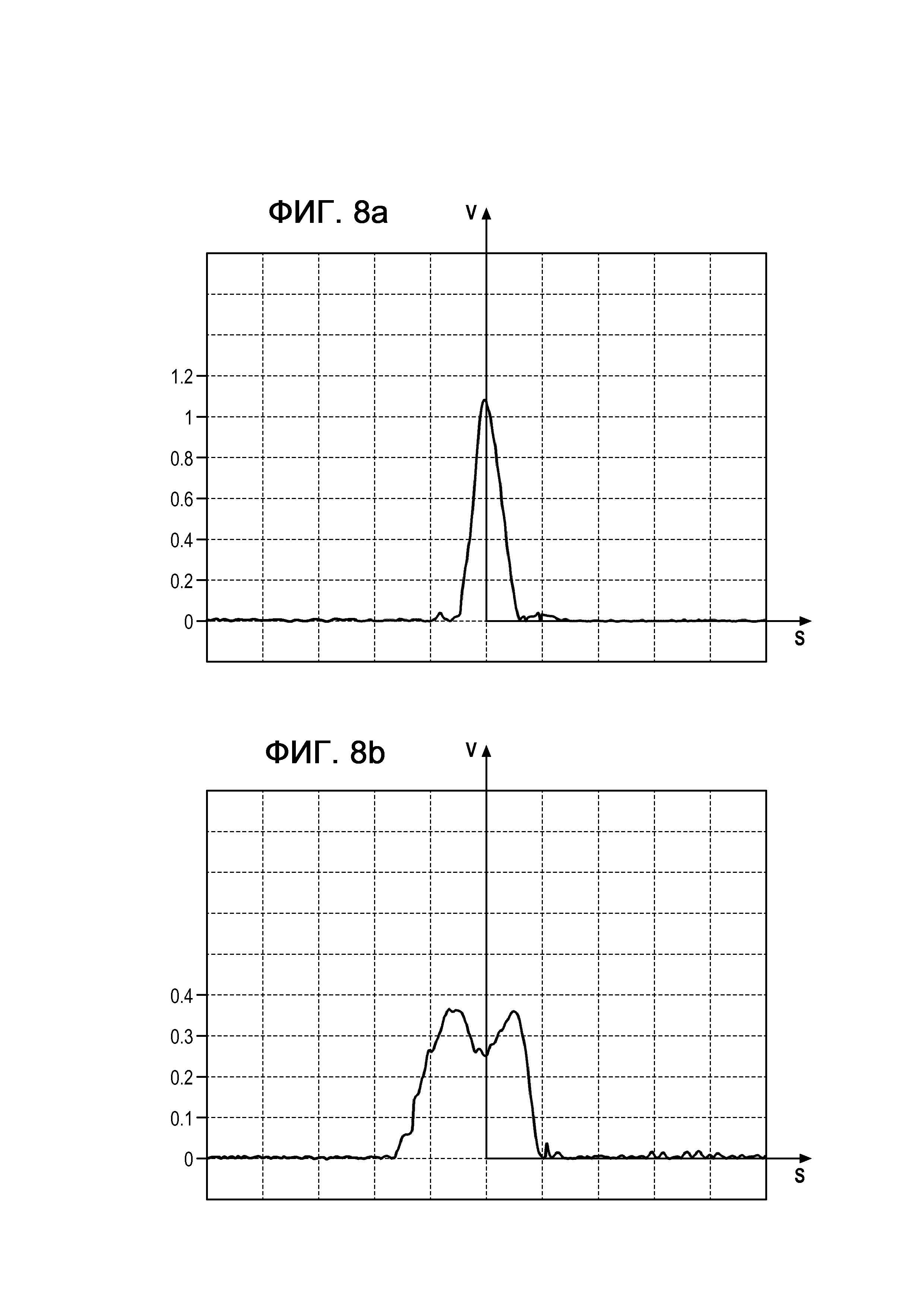
На фиг. 8а и 8b представлена амплитуда сигнала, измеренная для известного детектора и детектора в соответствии с изобретением соответственно, когда детектор находится в 5 см от намагниченного грунта, на который помещен стальной шар, и который детектор исследует сканирующим движением направо/налево.
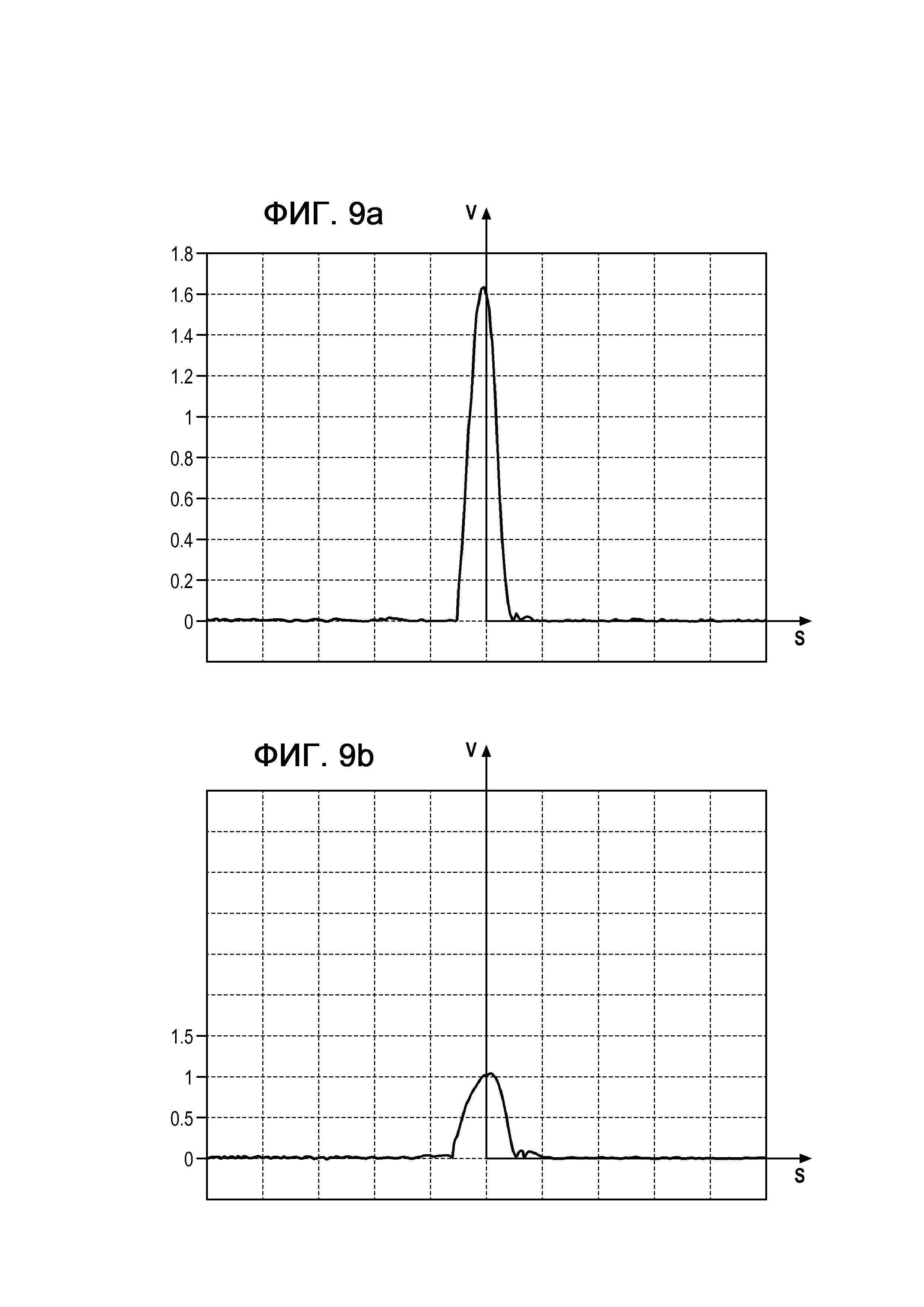
На фиг. 9а и 9b представлена амплитуда сигнала, измеренная для известного детектора и детектора в соответствии с изобретением соответственно, когда детектор находится в 5 см от намагниченного грунта, в который был закопан имитатор типа LI-11, и который детектор исследует сканирующим движением направо/налево.
На фиг. 10а и 10b представлена амплитуда сигнала, измеренная для известного детектора и детектора в соответствии с изобретением соответственно, когда детектор находится в 5 см от намагниченного грунта, в который был закопан имитатор типа РМА-2, и который детектор исследует путем сканирующего движения направо/налево.
На фиг. 11а и 11b представлена амплитуда сигнала, измеренная для известного детектора и детектора в соответствии с изобретением соответственно, когда детектор находится в неподвижном состоянии в 5 см от намагниченного грунта, относительно которого детектор наклонен в бок на 20°.
На фиг. 12а и 12b представлена амплитуда сигнала, измеренная для известного детектора и детектора в соответствии с изобретением соответственно, когда детектор находится в 5 см от намагниченного грунта, относительно которого детектор наклонен в бок на 20° и исследует сканирующим движением направо/налево.
Осуществление изобретения
Составной детектор 1 в соответствии с изобретением содержит детекторную головку 10, закрепленную на ручке 20 с помощью механического соединения 30.
Детекторная головка 10 соответствует части, предназначенной для приближения к грунту для поиска заданных объектов. Для этого она содержит:
- пластину 11;
- индуктивный датчик, закрепленный на пластине 11 и содержащий отдельные передающую катушку 12 и приемную катушку 13, и
- другой датчик, предпочтительно георадар.
Передающая катушка 12 и приемная катушка 13 являются униполярными. Традиционно передающая и приемная катушки 12, 13 выполнены с возможностью передачи и приема волн частотой от 300 Гц до 180 кГц. Передающая катушка 12 и приемная катушка 13 являются униполярными. Традиционно передающая и приемная катушки 12, 13 выполнены с возможностью передачи и приема волн частотой от 300 Гц до 180 кГц. Каждая из передающей и приемной катушек 12, 13 образует контур и выполнена таким образом, что контур передающей катушки 12 по меньшей мере частично перекрывает контур приемной катушки 13 таким образом, что образуется зона 14 связи. Такая конфигурация позволяет получить индуктивный датчик с минимальной взаимной индуктивностью.
По сравнению с индуктивным датчиком, содержащим одну катушку, являющуюся излучателем и приемником и образованную двумя последовательными контурами с обратными знаками для нейтрализации внешних паразитных эффектов, использование двух отдельных катушек 12, 13, образующих передающую катушку 12 и приемную катушку 13, позволяет усилить сигнал и таким образом не требует снижения порога обнаружения для того, чтобы избежать риска ложных тревог.
Зона связи вытянута в первом продольном направлении, определяющем первую ось Х1. Для дополнительного уменьшения риска ложных тревог и одновременно с этим повышения чувствительности детектора 1 индуктивный датчик расположен таким образом, что при использовании ручка 20 проходит в плоскости P1, перпендикулярной к пластине 11, на которой закреплены передающая и приемная катушки 12, 13, а первая ось X1 зоны 14 связи пересекает эту плоскость Р1.
Термин «пересекает» в настоящем контексте означает, что первая ось X1 образует с плоскостью P1 угол, составляющий от 70° до 110°, предпочтительно приблизительно 90°. Кроме того, контур передающей катушки 12 и контур приемной катушки 13 имеют симметричную форму, причем первая ось проходит через точки 14а, 14b пересечений двух контуров.
Под «продольным направлением» детали или элемента в настоящем контексте подразумевается направление, в котором деталь или элемент имеют наибольший размер.
Иными словами, при сканировании грунта оператором, которое осуществляется сообразно со сканирующим движением направо/налево, определяющим ось Х0 сканирования, т.е. перпендикулярно направлению продвижения оператора, детекторная головка 10 ориентирована таким образом, что зона 14 связи находится по существу на одной линии с направлением сканирующего движения. Таким образом, в каждый момент передающая и приемная катушки 12, 13 находятся по существу на одинаковом расстоянии от грунта, даже при наклоне детекторной головки 10 и/или при неровностях грунта, что значительно снижает риски ложной тревоги. Кроме того, благодаря этой новой ориентации, металлический лом, находящийся на грунте, необязательно пересекает зону 14 связи, в отличие от известного детектора (фиг. 4а), в котором зона 14 связи трансверсальна оси Х0 сканирования и, таким образом, обязательно пересекается.
Контуры передающей и приемной катушек 12, 13 вытянуты во втором продольном направлении, определяющем вторую ось Х2. Эта вторая ось Х2 по существу параллельна первой оси X1. Иными словами, контур передающей катушки 12, зона 14 связи и контур приемной катушки 13 имеют одно продольное направление и проходят рядом друг с другом.
Кроме того, форма детекторной головки 10 приспособлена к конфигурации и пространственной ориентации передающей и приемной катушек 12, 13. Таким образом, она вытянута в том же направлении, что и контуры катушек, и проходит в продольном направлении, по существу параллельном первой оси Х1.
В соответствии с первым вариантом осуществления, передающая катушка 12 и приемная катушка 13 напечатаны непосредственно на верхней пластине 11. Таким образом, пластина 11 и передающая и приемная катушки 12, 13 образуют печатную плату. Преимущество этого варианта осуществления состоит в уменьшении пространства, занимаемого индуктивным датчиком в детекторной головке 10, а также общей массы детектора 1. Однако его цена является существенной. Следовательно, в соответствии со вторым вариантом осуществления, представленным на фиг. 2 и 3, передающая и приемная катушки 12, 13 могут содержать проволочные спирали, причем передающая катушка 12 содержит большее число витков, чем приемная катушка 13.
Механическое соединение 30 содержит соединение типа жесткой заделки, поворотное соединение или шаровую цапфу. Предпочтительно, механическое соединение 30 закреплено с возможностью вращения вокруг третьей оси Х3, заключенной в плоскости Р1 и перпендикулярной первой оси X1. Блокирование вращения вокруг третьей оси Х3 побуждает оператора держать детектор 1 таким образом, чтобы зона 14 связи при поиске была по существу параллельна оси Х0 сканирования.
Как вариант, детектор 1 дополнительно содержит средства 40 для захвата детектора 1 оператором. Обычно средства 40 захвата могут содержать дугу 41, выполненную с возможностью вмещения руки оператора с возможностью скольжения, а также рукоять 42, выполненную с возможностью захвата оператором.
В соответствии с одним из вариантов осуществления, рукоять 42 проходит в плоскости Р1, чтобы структурно вынуждать оператора удерживать детектор 1 так, чтобы зона 14 связи была ориентирована таким образом, чтобы при поиске она проходила по существу параллельно оси Х0 сканирования.
Ручка 20 может быть телескопической и/или содержать множество отдельных частей, выполненных с возможностью сборки друг с другом перед их скреплением, например, с помощью болтового соединения.
Традиционно детектор 1 содержит также средства обработки 50, содержащие в частности микропроцессор, выполненный с возможностью обработки сигнала, обнаруженного индуктивным датчиком 12, 13, такой как одна или множество электронных карт, запоминающее устройство и в случае необходимости средства оповещения и/или индикаторное устройство 51.
Средства 50 обработки могут быть расположены целиком или частично в области средств захвата.
На фиг. 5а-10b проиллюстрирована первая серия сравнительных испытаний, проведенных, с одной стороны, с известным детектором 1 (фиг. Ya, Y ∈ [5; 12]), т.е. составным детектором 1, содержащим индуктивный датчик с перекрывающимися передающей и приемной катушками, но с зоной связи, проходящей перпендикулярно оси Х0 сканирования, и с детектором 1 в соответствии с изобретением (фиг. Yb, Y ∈ [5; 12]), т.е. с детектором 1, в котором ось X1 передающей и приемной катушек 12, 13 параллельна оси Х0 сканирования.
Эти испытания проводились на намагниченном грунте. В первом случае (фиг. 5а, 8а и 8b) на намагниченный грунт был помещен стальной шарик диаметром 6,5 мм. Во втором случае (фиг. 6а, 6b, 9а и 9b) в намагниченный грунт был закопан имитатор взрывателя типа LI-11. В третьем случае (фиг. 7а, 7b, 10а и 10b) в намагниченный грунт был закопан имитатор взрывателя типа РМА-2.
Детекторная головка 10 проводилась сканирующим движением направо/налево в соответствии с движением, рекомендованным операторам на участке. Под сканирующим движением направо/налево в настоящем контексте подразумевается боковое движение, т.е. движение по оси Х0 сканирования, перпендикулярной плоскости Р1, в которой проходит ручка 20.
В этой первой серии испытаний при сканирующем движении детекторная головка 10 находилась в контакте с грунтом (0 см - фиг. 5а-7b), а затем размещалась в 5 см от грунта (фиг. 8а-10b). Интенсивность сигнала обнаружения регистрировалась при каждом сканирующем движении (направо/налево).
Результаты измерений для трех случаев с известным детектором и детектором 1 в соответствии с изобретением при 0 см и 5 см от грунта приведены в таблице ниже.
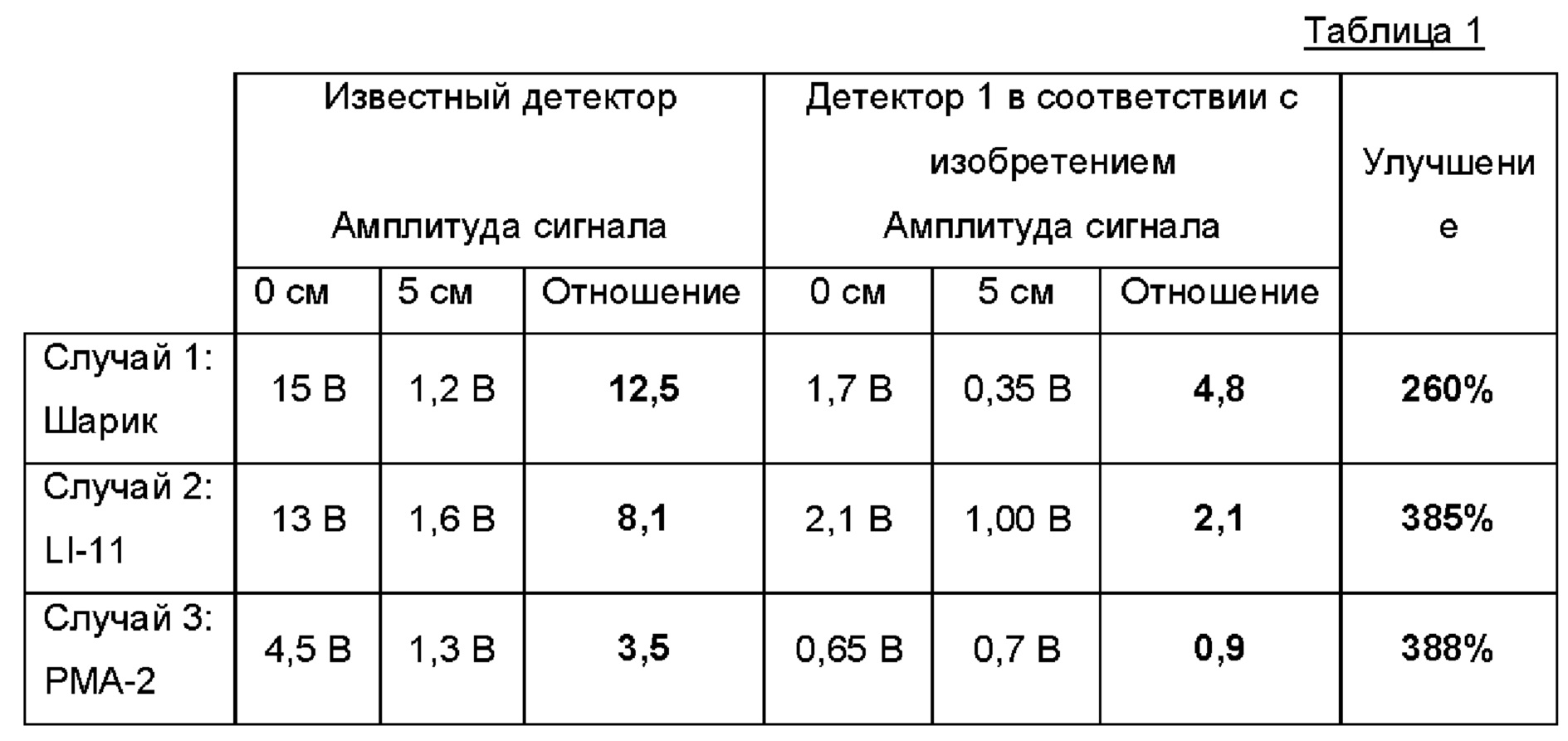
Таким образом, из этой серии сравнительных испытаний следует, что при изменении ориентации передающей катушки 12 и приемной катушки 13 относительно оси Х0 сканирования отношение между амплитудой сигнала при 0 см (при контакте с грунтом) и на расстоянии 5 см от грунта значительно уменьшается. Иными словами, влияние типа грунта и металлического лома или лома, содержащего оксиды, находящегося в грунте, значительно снижается, когда направление сканирования параллельно первой оси X1 (и, таким образом, продольному направлению зоны 14 связи).
Таким образом, эта конфигурация позволяет значительно повысить чувствительность обнаружения детектора 1 в соответствии с изобретением, поскольку тип грунта и случайные обломки оказывают меньшее влияние на обнаружение и таким образом инициируют меньше ложных тревог.
На фиг. 11а, 11b, 12а и 12b проиллюстрирована вторая серия сравнительных испытаний, демонстрирующая влияние этой конфигурации на ложные тревоги, вызванные неоднородностью грунта и/или неправильными сканирующими движениями оператора.
В ходе этой второй серии испытаний детекторную головку 10 известного детектора и детектора 1 в соответствии с изобретение проводили над намагниченным грунтом в пяти сантиметрах от него. Коэффициент усиления двух детекторов был уравнен, чтобы они выдавали одинаковую интенсивность для одного и того же коэффициента усиления. Однако в первом случае детекторная головка 10 была наклонена под углом в 20° относительно грунта и оставалась неподвижной (отсутствие сканирующего движения - фиг. 11а и 11b), а во втором случае детекторная головка 10 была наклонена под этим же углом в 20° относительно грунта, осуществляя то же сканирующее движение направо/налево, что и в первой серии испытаний (фиг. 12а et 12b). Следует заметить, что при этом угле в 20° для известного детектора одна из передающей и приемной катушек 12, 13 находилась дальше от грунта, чем другая, тогда как для детектора 1 в соответствии с изобретением обе катушки были одинаково наклонены относительно грунта, но каждая из них имела часть, расположенную ближе к грунту, и более удаленную часть.
Результаты измерений для этих двух случаев с известным детектором и детектором 1 в соответствии с изобретением приведены в таблице ниже.

Таким образом, из этой серии сравнительных испытаний следует, что при изменении ориентации передающей катушки 12 и приемной катушки 13 относительно оси Х0 сканирования значительное уменьшение амплитуды сигнала обеспечивается простым наклоном детектора 1. В самом деле, в случае с известным детектором разность амплитуды сигнала вследствие простого наклона детекторной головки в неподвижном состоянии составляет 350 мВ против 200 мВ в случае с детектором 1 в соответствии с изобретением. Аналогичным образом, амплитуда сигнала вследствие простого сканирования с наклоном составляет 400 мВ для известного детектора против 250 мВ для детектора 1 в соответствии с изобретением.
Детектор 1 содержит дополнительный датчик, предпочтительно георадар 60.
В этом случае георадар 60 содержит передающую антенну 61 и приемную антенну 62, выполненные с возможностью передачи и приема электромагнитных волн в грунте, например, с частотой от 100 МГц до 8 ГГц. Когда эти волны встречают изменения среды, часть передается на поверхность и регистрируется приемной антенной 62.
Предпочтительно, за счет ориентации передающей и приемной катушек относительно оси Х0 сканирования, доступная поверхность внутри каждого из контуров увеличивается. Таким образом, каждая из передающей и приемной антенн 61, 62 может быть расположена в центре одного из контуров передающей и приемной катушек 12, 13. Таким образом, максимальная чувствительность радара 60 находится в той же зоне, что и максимальная чувствительность индуктивного датчика, т.е. в зоне 14 соединения. Иными словами, лепестки диаграммы направленности микроволн радара 60 и лепестки диаграммы направленности магнитных волн индуктивного датчика 12, 13 соответствуют таким образом, что позволяют оператору считать, что обнаружение целевого объекта осуществляется в центральной зоне детекторной головки 10 при наведении на точку.
Поскольку контуры передающей и приемной катушек 12, 13 имеют вытянутую форму, передающая и приемная антенны 61, 62 могут быть вытянуты вдоль четвертой оси X4, параллельной второй оси Х2, чтобы максимизировать излучающую поверхность и, таким образом, пропускную способность. Например, передающая и приемная антенны 61, 62 могут иметь форму логарифмической спирали, которая была растянута для максимизации излучающей поверхности и коэффициента направленного действия антенн, при этом минимизируя длину каждого из вибраторов 63, образующих спираль антенн 61, 62, чтобы не увеличивать импульс. В антенне в виде растянутой логарифмической спирали расстояние между вибраторами 63 спирали на самом деле больше и возрастает логарифмически.
Например, растянутая логарифмическая спираль, образующая антенны 61, 62, может иметь высоту приблизительно 150 см для 80 мм.
Как вариант, передающая и приемная антенны 61, 62 радара 60 могут быть следующих типов: четырехгребневая рупорная антенна, конусная антенна «бабочка» (англ. «bow tie»), прямоугольная конусная антенна «бабочка», антенна «спираль Архимеда», антенна Вивальди.
Традиционно передающая и приемная антенны 61, 62 могут быть изготовлены из меди, которая является хорошим проводником электрического тока.
Однако, чтобы снизить риски окисления антенн, передающая и приемная антенны 61, 62 могут быть частично изготовлены из никеля и/или хрома, а частично из меди. Никель и хром имеют то преимущество, что они не окисляются со временем, будучи при этом проводниками электрического тока.
Например, центр 64 каждой из антенн 61, 62 может быть изготовлен из меди и защищен слоем, содержащим золото, тогда как остальная часть 65 антенн 61, 62 выполнена из никеля и/или хрома. Область, проходящая между центром 64 каждой из антенн 61, 62 и остальной антенной 61, 62 может быть выполнена из меди и покрыта слоем никеля (и/или хрома).
Кроме того, для ограничения взаимодействия с передающей и приемной катушками 12, 13, толщина передающей и приемной антенн 61, 62 меньше толщины скин-эффекта катушек 12, 13. Таким образом, антенны 61, 62 становятся невидимыми для магнитного поля индуктивного датчика 12, 13. Однако следует заметить, что толщина передающей и приемной антенн 61, 62 должна оставаться больше заданной толщины, чтобы обеспечить достаточную механическую прочность антенн 61, 62 и избежать всякого риска поломки. Таким образом, толщина передающей и приемной антенн 61, 62 выбирается таким образом, чтобы она составляла от ста нанометров до одного микрона. Например, толщина передающей и приемной антенн 61, 62 может составлять приблизительно 200 нм (с точностью до 10%).
Для изготовления передающей и приемной антенн 61, 62 такой толщины, можно, в частности, использовать технологию физического осаждения из паровой фазы (PVD, от англ. Physical Vapor Deposition). Эта технология позволяет на самом деле получить антенны 61, 62 очень малой толщины с высокой размерной точностью и изготовить множество антенн за один раз.
Реферат
Настоящее изобретение относится к составному детектору, содержащему детекторную головку (10), содержащую: пластину (11) и индуктивный датчик, закрепленный на пластине (11) и содержащий отдельные передающую катушку (12) и приемную катушку (13), каждая из которых образует контур, причем контур передающей катушки (12) по меньшей мере частично перекрывает контур приемной катушки (13) таким образом, чтобы сформировать зону (14) связи, причем зона (14) связи вытянута в первом продольном направлении, определяя первую ось (X1), причем ручка (20) проходит в плоскости, перпендикулярной пластине (11), а первая ось (X1) зоны связи трансверсальна указанной плоскости. Техническим результатом является более высокая чувствительность. 2 н. и 14 з.п. ф-лы, 21 ил., 2 табл.
Формула
Документы, цитированные в отчёте о поиске
Оценка пластов с использованием каротажных измерений методом магнитного резонанса
Комментарии