Режекторный фильтр - RU2759150C1
Код документа: RU2759150C1
Чертежи
Описание
Изобретение относится к радиолокационной технике и может быть использовано в когерентно-импульсных радиолокационных системах для выделения сигналов движущихся целей на фоне пассивных помех с неизвестными корреляционными свойствами.
Известно радиолокационное устройство для обнаружения движущейся цели [1], содержащее последовательно включенные блоки задержки, перемножитель комплексных чисел и вычитатель. Однако это устройство обладает низкой эффективностью выделения сигнала движущейся цели.
Другим известным устройством является корреляционный автокомпенсатор [2], который содержит ряд блоков задержки, два перемножителя, сумматор и блок оценки параметров коррелированной помехи. Недостатком этого устройства является плохое подавление кромок протяженной помехи из-за большой постоянной времени цепи адаптивной обратной связи.
Наиболее близкое к данному изобретению цифровое устройство для подавления пассивных помех [3], выбранное в качестве прототипа, содержит весовой блок, комплексный сумматор и блоки задержки. Однако данное устройство имеет потери в эффективности режектирования помех.
Задачей, решаемой в изобретении, является повышение эффективности режектирования пассивной помехи и выделения сигналов движущихся целей при обработке сигналов от цели на фоне пассивных помех с априорно неизвестными корреляционными свойствами.
Для решения поставленной задачи в режекторный фильтр, содержащий весовой блок, первый блок задержки, первый и второй комплексные сумматоры, второй блок задержки и синхрогенератор, введены третий и четвертый блоки задержки и вычислитель весового коэффициентов, соединенные между собой определенным образом.
Сущность изобретения как технического решения характеризуется совокупностью существенных признаков, изложенных в формуле изобретения и обеспечивающих решение поставленной задачи путем оптимальной и согласованной обработки поступающих импульсов.
Технический результат изобретения состоит в повышении эффективности режектирования пассивной помехи с априорно неизвестными корреляционными свойствами и выделения сигналов движущихся целей.
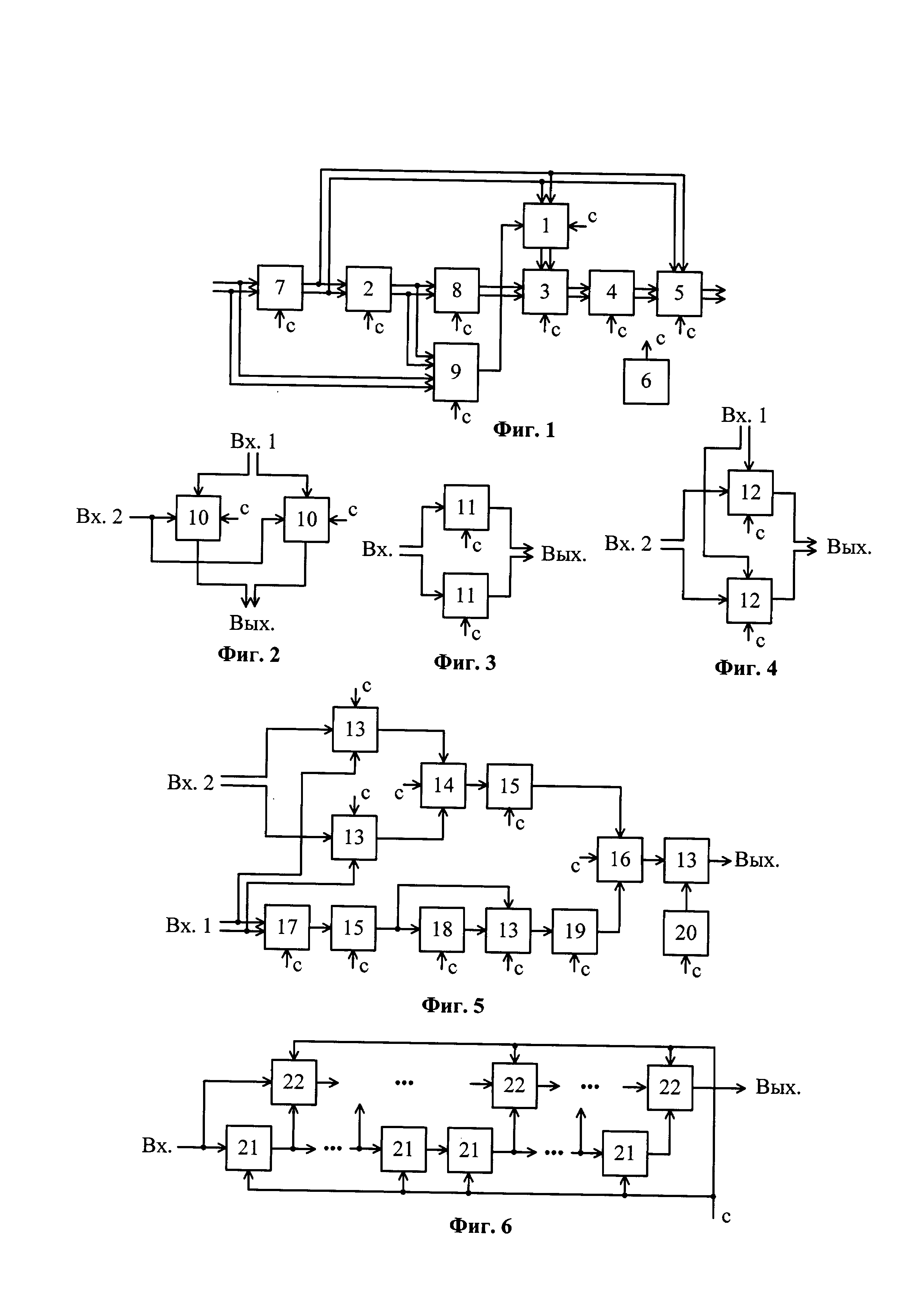
На фиг. 1 представлена структурная электрическая схема режекторного фильтра; на фиг. 2 - весового блока; на фиг. 3 - блока задержки; на фиг. 4 - комплексного сумматора; на фиг. 5 - вычислителя весового коэффициента; на фиг. 6 - накопителя.
Режекторный фильтр (фиг. 1) содержит весовой блок 1, блоки 2, 4, 7, 8 задержки, комплексные сумматоры 3, 5, синхрогенератор 6 и вычислитель 9 весового коэффициента.
Весовой блок 1 (фиг. 2) содержит два перемножителя 10; блоки 2, 4, 7, 8 задержки (фиг. 3) содержат две линии 11 задержки; комплексные сумматоры 3, 5 (фиг. 4) содержат два сумматора 12; вычислитель 9 весового коэффициента (фиг. 5) содержит четыре перемножителя 13, сумматор 14, два накопителя 15, делитель 16, блок 17 объединения, линию 18 задержки, блок 19 извлечения квадратного корня и блок 20 памяти; накопитель 15 (фиг. 6) содержат n элементов 21 задержки на интервал ta и n сумматоров 22.
Режекторный фильтр может быть осуществлен следующим образом.
Последовательность когерентных радиоимпульсов, состоящих из сигнала от движущейся цели и пассивной помехи, значительно превышающей сигнал, представлена цифровыми кодами (хjl,уjl) входных квадратурных проекций, следующих через период повторения Т в каждом (l-м) элементе разрешения по дальности (кольце дальности) каждого (j-го) периода повторения.
Цифровые отсчеты в заявляемом устройстве (фиг. 1) поступают на соединенные входы третьего блока 7 задержки (фиг. 3) на интервал τ и первые входы вычислителя 9 весового коэффициента (фиг. 5). На вторые входы вычислителя 9 весового коэффициента поступают отсчеты с выхода первого блока задержки на интервал Т - τ. Отсчеты на первых и вторых входах вычислителя 9 весового коэффициента разделены на интервал Т.
В вычислителе 9 осуществляется перемножение задержанных и незадержанных одноименных проекций с последующим суммированием полученных произведений в сумматоре 15. В блоке 17 объединения вычисляется сумма квадратов проекций. В накопителях 15 (фиг. 6) с помощью элементов 21 задержки и сумматоров 22 осуществляется скользящее вдоль дальности в каждом периоде повторения суммирование поступающих отсчетов с n+1 смежных элементов разрешения по дальности временного строба, кроме элемента с номером n/2+1, для чего выходные величины элемента 21 задержки с номером n/2 поступают только на последующий элемент 21 задержки. В результате накопления на первом входе делителя 16 образуется величина
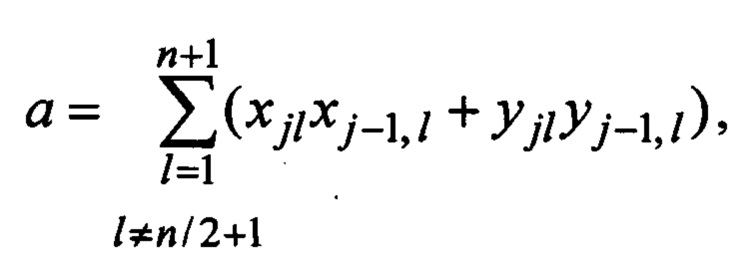
где j - номер текущего периода, l - номер текущего кольца дальности, n - объем обучающей выборки, определяемый числом отсчетов со смежных элементов разрешения по дальности, за исключением среднего отсчета с номером l=n/2+1.
В блоке 19 извлечения квадратного корня с учетом предыдущих операций в блоках 17, 15, 18 и 13 вычисляется поступающая на второй вход делителя 16 величина
b=(c1c2)1/2,
где

На выходе делителя 16 образуется оценка действительной части комплексного коэффициента корреляции
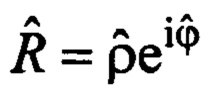

где


В результате перемножения оценки

поступающий на второй вход весового блока 1 (фиг. 2).
Четвертый блок 8 задержки на интервал т совместно с первым блоком 2 задержки на интервал T - τ образуют результирующую задержку на интервал, равный периоду повторения Т. Во втором блоке 4 задержки осуществляется задержка на интервал Т. В результате на входы комплексных сумматоров 3 и 5 отсчеты поступают синхронно, образуя на выходе комплексного сумматора 5 отсчеты остатков режектированной помехи в виде

где Ukl=xkl+iykl.
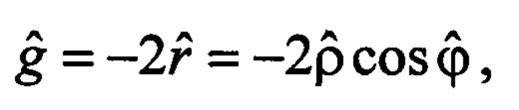
Весовой коэффициент


Введение третьего блоке 7 задержки входных отсчетов на интервал τ обеспечивает вычисление оценок и весового коэффициента

τ=tв+ntд/2,
где tв - время вычисления весового коэффициента

При этом достигается соответствие вводимого в весовой блок 1 весового коэффициента

Адаптивная обработка осуществляется для среднего элемента обучающей выборки, исключенного в накопителях 15 (фиг. 6) в соответствии с алгоритмами вычисления оценки


Синхронизация режекторного фильтра осуществляется подачей на все блоки заявляемого устройства последовательности синхронизирующих импульсов от синхрогенератора 6 (фиг. 1). Период повторения синхронизирующих импульсов равен интервалу временной дискретизации tд, выбираемому из условия требуемой разрешающей способности по дальности.
Достигаемый технический результат состоит в следующем. Вычисляемые оценки параметров помехи используются при взвешивании ее отсчетов, соответствующих среднему элементу обучающей выборки, что уменьшает рассогласования между получаемыми усреднением отсчетов обучающей выборки оценками и реальными свойствами помехи. Исключение среднего элемента из обучающей выборки позволяет исключить возможное влияние сигнала на эффективность режектирования помехи.
Таким образом, режекторный фильтр позволяет повысить эффективность подавления пассивной помехи и выделения сигналов движущихся целей на фоне пассивных помех с априорно неизвестными корреляционными свойствами.
Библиография
1. Патент №63-49193 (Япония), МПК G01S 13/52. Радиолокационное устройство для обнаружения движущейся цели / К.К. Тосиба. Опубл. 03.10.1988. - Изобретения стран мира. - 1989. - Выпуск 109. - №15. - С. 52.
2. Радиоэлектронные системы: основы построения и теория. Справочник /Я.Д. Ширман, С.Т. Багдасарян, А.С. Маляренко, Д.И. Леховицкий [и др.]; под ред Я.Д. Ширмана. - 2-е изд., перераб. и доп. - М: Радиотехника, 2007; с. 439, рис. 25.22.
3. А.с. 743208 СССР, МПК G01S 7/36. Цифровое устройство для подавления пассивных помех / Д.И. Попов. - №2540079 / 09; заявл. 03.11.1977; опубл. 25.06.1980, Бюл. №23. - 4 с.
Реферат
Изобретение относится к радиоационной технике и предназначено для выделения сигналов движущихся целей на фоне пассивных помех с неизвестными корреляционными свойствами. Технический результат - повышение эффективности выделения сигналов движущихся целей на фоне пассивных помех с априорно неизвестными корреляционными свойствами. Указанный результат достигается тем, что режекторный фильтр содержит весовой блок, первый и второй комплексные сумматоры, первый, второй, третий и четвертый блоки задержки, вычислитель весового коэффициента и синхрогенератор, определенным образом соединенные между собой и осуществляющие адаптивную когерентную обработку исходных цифровых отсчетов. 6 ил.
Формула
Документы, цитированные в отчёте о поиске
Фильтр режекции помех
Адаптивный режекторный фильтр
Режекторный фильтр
Вычислительное устройство режекции помех
Вычислитель для подавления помех
Вычислитель для режекции помех
Фильтр режектирования помех
Вычислитель для режекции помех
Вычислитель для режекторной фильтрации помех
Фильтр режектирования помех
Устройство режекции пассивных помех
Адаптивный фильтр режекции помех
Вычислитель-режектор пассивных помех
Вычислитель для режектирования помех
Фильтр режектирования помех
Комментарии