Комбинированный подшипник скольжения - RU2725842C2
Код документа: RU2725842C2
Чертежи






Описание
Перекрестная ссылка на родственную заявку
[0001] Настоящая заявка заявляет приоритет предварительной заявки на патент США №62/337555, поданной 17 мая 2016 г., содержание которой полностью включается в настоящий документ посредством ссылки.
Область техники, к которой относится изобретение
[0002] Настоящее изобретение относится к подшипникам скольжения и, в частности, к подшипникам скольжения, объединяющим в одно целое гидродинамический и магнитный несущие элементы.
Предпосылки создания изобретения
[0003] Гидродинамические подшипники (FFB) и активные магнитные подшипники (АМВ) являются конкурирующими на рынке устройствами. FFB, в частности подшипники скольжения (JB), представляют собой улучшенные несущие элементы вследствие их большей несущей способности и способности вводить пассивное демпфирование в систему ротора. Однако JB проявляют неустойчивую вибрацию при высокой скорости, называемую масляной вибрацией, которая возбуждается, когда скорость ротора достигает приблизительно удвоенной первой критической скорости. Данная неустойчивость ограничивает возможность увеличения скорости вращения ротора.
[0004] С другой стороны, АМВ обеспечивают бесконтактную опору ротора при высоких скоростях и не подвергаются неустойчивостям вибрации. Они обладают дополнительной особенностью, которая заключается в их возможностях как управляющих элементов. АМВ могут обеспечивать переменные и управляемые жесткость и демпфирование и дополнительно могут обеспечивать управление нарушением равновесия и множество других возможностей управления. Однако АМВ имеют некоторые недостатки. В частности, предметом озабоченности проектировщиков АМВ всегда являются проблемы надежности. В частности, АМВ всегда проектируют с дублирующей системой подшипника, называемой «запасным подшипником», для того чтобы запасной подшипник нес ротор в случае отказа АМВ.
Сущность изобретения
[0005] Настоящее изобретение предусматривает высокотехнологичный высокоэффективный комбинированный подшипник, объединяющий в одном комбинированном устройстве гидродинамический подшипник (FFB) и электромагнитный привод (ЕМА). Во всех случаях гидродинамический подшипник может нести нагрузку, тогда как электромагнитный привод может быть использован либо только в качестве устройства управления, либо как в качестве устройства управления, так и в качестве несущего элемента. В последнем случае электромагнитный привод можно рассматривать как активный магнитный подшипник (АМВ).
[0006] Объединение АМВ и JB в одном устройстве, называемом в настоящем документе комбинированным подшипником скольжения (IJB), обладает явными преимуществами. IJB обладает всеми преимуществами JB и АМВ и избегает всех недостатков АМВ и JB. IJB представляет собой улучшенный несущий элемент вследствие его большей несущей способности и способности вводить пассивное демпфирование в систему ротора. Более того, он не подвержен неустойчивостям вибрации и обладает возможностями устройства управления. IJB может обеспечивать переменные и управляемые жесткость и демпфирование и дополнительно может обеспечивать управление нарушением равновесия и множество других возможностей управления. Наиболее важно то, что поскольку JB несет ротор во всех случаях, необходимость в запасном подшипнике отсутствует.
[0007] Таким образом, общей целью настоящего изобретения является предоставление усовершенствованного подшипника для вращающихся машин.
[0008] Дополнительной целью настоящего изобретения является предоставление гидродинамического подшипника, объединенного в одно целое с электромагнитным приводом, которые ограничены в едином пространстве.
[0009] Еще одной целью настоящего изобретения является предоставление гидродинамического подшипника, объединенного с электромагнитным приводом, которые ограничены в едином пространстве, заполненном маслом.
[0010] Еще одной целью настоящего изобретения является предоставление в комбинированном подшипнике электромагнитного привода, выполняющего функцию активного магнитного подшипника.
[0011] Еще одной целью настоящего изобретения является предоставление в комбинированном подшипнике активного магнитного подшипника, способного или неспособного нести нагрузку.
[0012] Частной целью настоящего изобретения является предоставление улучшенного несущего элемента.
[0013] Дополнительной целью настоящего изобретения является предоставление несущего элемента с улучшенной несущей способностью.
[0014] Еще одной целью настоящего изобретения является предоставление несущего элемента, способного вводить пассивное демпфирование в систему ротора.
[0015] Еще одной целью настоящего изобретения является предоставление несущего элемента, не подверженного неустойчивостям вибрации.
[0016] Еще одной целью настоящего изобретения является предоставление несущего элемента, способного выполнять функцию устройства управления.
[0017] Дополнительной целью настоящего изобретения является предоставление несущего элемента, способного обеспечивать переменные и управляемые жесткость и демпфирование.
[0018] Дополнительной целью настоящего изобретения является предоставление несущего элемента, способного обеспечивать управление нарушением равновесия.
[0019] Дополнительной целью настоящего изобретения является предоставление несущего элемента, способного обеспечивать множество возможностей активного управления.
[0020] Дополнительной целью настоящего изобретения является предоставление улучшенного несущего элемента, способного обеспечивать все вышеуказанные возможности без необходимости в запасном подшипнике.
[0021] Преимущественно, комбинированный подшипник скольжения согласно настоящему изобретению может одновременно достигать всех вышеуказанных целей.
[0022] В предпочтительном варианте осуществления магнитный подшипник окружает пластинчатый ротор и сохраняет подходящий собственный зазор. С каждой стороны от АМВ смонтированы две шейки (возможно, имеющие такой же диаметр, как пластинчатый ротор), которые удерживают на месте пластины ротора. Над двумя шейками установлены два JB с их собственным отдельным зазором. Маслопроводы вводят в два JB масло, которое может свободно втекать в пространство АМВ. Для предотвращения вытекания масла наружу из комбинированного подшипника используются масляные уплотнения.
[0023] Данный вариант осуществления достигает назначенных целей уникальным образом. Для сохранения симметрии два подшипника скольжения окружают АМВ в едином замкнутом пространстве. В это замкнутое пространство вводится масло, которое, таким образом, заливает как АМВ, так и FFB. Затем, для управления АМВ с целью достижения необходимых характеристик используется устройство управления.
[0024] В другом варианте осуществления используется только один FFB и один АМВ. В этом варианте осуществления магнитный подшипник окружает пластинчатый ротор и сохраняет подходящий собственный зазор. Рядом с АМВ смонтирована шейка (возможно, имеющая такой же диаметр, как пластинчатый ротор), которая удерживает на месте пластины ротора. Над шейкой установлен JB с его собственным отдельным зазором. Маслопроводы вводят в JB масло, которое может свободное втекать в пространство АМВ. Для предотвращения вытекания масла наружу из комбинированного подшипника используют масляные уплотнения.
[0025] Возможны и другие возможные варианты осуществления с двумя АМВ и одним FFB, и специалисты в данной области техники могут в явном виде выбирать вариант осуществления, наиболее подходящий для имеющегося в распоряжении конкретного применения.
[0026] Должно быть очевидно, что для целей настоящего изобретения не имеет значения, каким является FFB: JB, эллиптическим подшипником, подшипником с порогом, многоклиновым подшипником или даже подшипником с самоустанавливающимися сегментами. Аналогично, не имеет значения, каким является АМВ: несущим АМВ или просто ЕМА. Тип используемых FFB и АМВ будет определяться конкретной конструкцией и областью применения.
[0027] Автор изобретения в его изобретении, представленном в 2010 г. в патенте США №7836601, показал возможность объединения FFB с АМВ в одном устройстве. Это было главным достижением. Вплоть до этого момента никто, находясь в здравом рассудке, не рассматривал добавление масла к магнитному подшипнику. Фактически, сторонники АМВ называли их "безмасляными" устройствами, заявляя это как одно из их преимуществ. Патент США №7836601 коренным образом изменяет мнение о том, можно ли вводить масло в АМВ.
[0028] В описании патента США №7836601 разъяснено, что комбинированный подшипник может иметь форму единого, цельного подшипника, содержащего гидродинамический подшипник в магнитном подшипнике, и, таким образом, текучее вещество для гидродинамического подшипника проходит по ротору магнитного подшипника и в зазоре между ротором и статором в магнитном подшипнике.
[0029] Однако в данном случае возникает проблема с проектированием, поскольку магнитный подшипник потребует большого зазора для рассеивания вырабатываемого тепла, а гидродинамический подшипник потребует небольшого зазора для повышения несущей способности. Данную проблему с проектированием можно решить двумя способами: первый - выбрать зазор, являющийся компромиссом между двумя конфликтующими требованиями, второй - использовать небольшой зазор для приложения нагрузки в гидродинамическом подшипнике и использовать повышенный расход текучего вещества для рассеивания тепла, вырабатываемого в магнитном подшипнике.
[0030] Аналогично патенту США №7836601, в настоящем изобретении рассматриваются FFB и АМВ в виде комбинированного подшипника, однако, в отличие от патента США №7836601, FFB и АМВ не используют совместно один и тот же зазор. В настоящем изобретении комбинированный подшипник состоит из АМВ и FFB, которые объединены в одно устройство, но не используют совместно один и тот же зазор. Однако, как АМВ, так и FFB погружены в масло.
[0031] В патенте США №7836601 раскрывается, что это изобретение фактически основывается на преимуществах и недостатках обоих устройств. Сущность изобретения заключается в использовании гидродинамического подшипника (не имеет значения, является он цилиндрическим подшипником скольжения, эллиптическим подшипником, многоклиновым подшипником или подшипником с самоустанавливающимися сегментами) в качестве первичного несущего подшипника, а также в использовании магнитного подшипника в сочетании с гидродинамическим подшипником для управления неустойчивостью. Это, должно быть, представляет собой весьма эффективное сочетание, причем в результате такого сочетания создаются подшипники, которые можно использовать при высоких скоростях в отсутствие проблем как с устойчивостью, так и с надежностью.
[0032] Более того, патент США №7836601 относится к множеству патентов, охватывающих магнитные подшипники, например, к патентам США
№6737777, «Magnetic bearing and use thereof»;
№6727617, «Method and apparatus for providing three axis magnetic bearing having permanent magnets mounted on radial pole stock»;
№6720695, «Rotor spinning device with a contactless, passive, radial bearing for the spinning rotor»;
№6717311, «Combination magnetic radial and thrust bearing»; №6707200, «Integrated magnetic bearing»; №6703736, «Magnetic bearing»; №6653756, «Magnetic bearing device»; и
№6606536, «Magnetic bearing device and magnetic bearing control device».
[0033] Однако ни в одном из этих патентов не обсуждается использование магнитных подшипников в качестве средств управления неустойчивостью подшипников скольжения. Фактически, большая часть известного уровня техники и современных усилий по разработке магнитных подшипников относится к использованию магнитных подшипников в качестве первичного несущего элемента и к использованию их избыточного управляющего воздействия для обеспечения некоторых полезных преимуществ устойчивости во вращающихся машинах.
[0034] Кроме того, патент США №7836601 относится к множеству патентов, охватывающих гидродинамические подшипники, например, к патентам США
№6089756, «Plain bearing»;
№5879085, «Tilt pad hydrodynamic bearing for rotating machinery»;
№5795076, «Tilt pad hydrodynamic bearing for rotating machinery»;
№5772334, «Fluid film bearings»;
№5743657, «Tilting pad journal bearing»;
№5743654, «Hydrostatic and active control movable pad bearing»;
№5634723, «Hydrodynamic fluid film bearings»;
№5549392, «Shaft seal for hydrodynamic bearing unit»;
№5531523, «Rotor journal bearing having adjustable bearing pads»;
№5516212, «Hydrodynamic bearing with controlled lubricant pressure distribution»;
№5489155, «Tilt pad variable geometry bearings, having tilting bearing pads and methods of making same»;
№5480234,«Journal bearing»;
№5322371, «Fluid film bearing»;
№5201585, «Fluid film journal bearing with squeeze film damper for turbo machinery»;
№5096309, «Hydrodynamic bearing system»;
№5032028, «Fluid film bearing»;
№4961122, «Hydrodynamic grooved bearing device»;
№4828403, «Resiliently mounted fluid bearing assembly»;
№4880320, «Fluid film journal bearings»;
№4767223, «Hydrodynamic journal bearings»;
№4597676, «Hybrid bearing»; №4526483, «Fluid foil bearing»; №4415281, «Hydrodynamic fluid film bearing»; №4300808, «Tilting-pad bearings»; №4034228, «Tilting pad bearing»; и
№3969804, «Bearing housing assembly method for high speed rotating shafts».
[0035] Однако ни в одном из этих патентов не предлагается использование магнитных подшипников в качестве средств управления неустойчивостями гидродинамических подшипников.
[0036] Фактически, разработка магнитных подшипников и разработка гидродинамических подшипников представляет собой два отдельных вопроса, и исследователи в обеих областях не принимают во внимание разработки в другой области, будто они являются двумя отдельными областями.
[0037] Исключением является патент США №6353273, «Hybrid foil-magnetic bearing». В данном изобретении предлагается использование в качестве несущих элементов как ленточного подшипника, так и магнитного подшипника. Это является возможным для несения нагрузки таким образом, что каждый из ленточного подшипника и магнитного подшипника несет часть нагрузки. Однако, по мнению автора настоящего изобретения, это решение не является наилучшим. Гибридный ленточно-магнитный подшипник, несмотря на то, что он способен работать при высоких скоростях, по-прежнему имеет те же недостатки, что и магнитные подшипники.
[0038] Несмотря на то, что гидродинамические подшипники и магнитные подшипники являются хорошо известными устройствами, по-прежнему не является очевидным тот факт, что их можно использовать в объединенной форме, поскольку современная технология такова, что эти устройства являются конкурирующими, а не взаимодополняющими. И те, и другие рассматриваются как несущие устройства, обладающие определенными возможностям управления (пассивного управления - для гидродинамических подшипников и активного управления - для магнитных подшипников). Поэтому сущностью настоящего изобретения является рассмотрение магнитного подшипника только в качестве управляющего устройства, а гидродинамического подшипника - только в качестве несущего устройства. Совокупным результатом, в дополнение ко всем известным преимуществам гидродинамических подшипников и магнитных подшипников, является получение подшипников с преимуществами большой несущей способности, повышенной надежности и использования при высоких скоростях в отсутствие неустойчивости. Более того, возникает дополнительное преимущество: поскольку магнитный подшипник не используется в качестве несущего элемента, будут сокращаться потребности в мощности, и, таким образом, могут использоваться более легкие магнитные подшипники меньшего размера, способные надежно управлять вибрациями ротора.
Краткое описание графических материалов
[0039] В сопроводительных графических материалах:
[0040] На фиг. 1 показана вертикальная проекция в поперечном сечении одного варианта осуществления настоящего изобретения, на которой изображен комбинированный подшипник скольжения, в котором магнитный подшипник окружает пластинчатый ротор и сохраняет подходящий собственный зазор. С каждой стороны АМВ смонтированы две шейки (возможно, имеющие такой же диаметр, как пластинчатый ротор), которые удерживают на месте пластины ротора.
[0041] На фиг. 2 показан покомпонентный вид варианта осуществления по фиг. 1, на котором показаны детали компонентов. Этот вариант осуществления был сооружен и испытан автором изобретения.
[0042] На фиг. 3 показана вертикальная проекция в поперечном сечении другого варианта осуществления настоящего изобретения, на которой изображен комбинированный подшипник скольжения, в котором магнитный подшипник окружает пластинчатый ротор и сохраняет подходящий собственный зазор, и шейка смонтирована в примыкании к АМВ и удерживает на месте пластины ротора.
[0043] На фиг. 4 показан покомпонентный вид варианта осуществления по фиг. 3, на котором показаны детали компонентов.
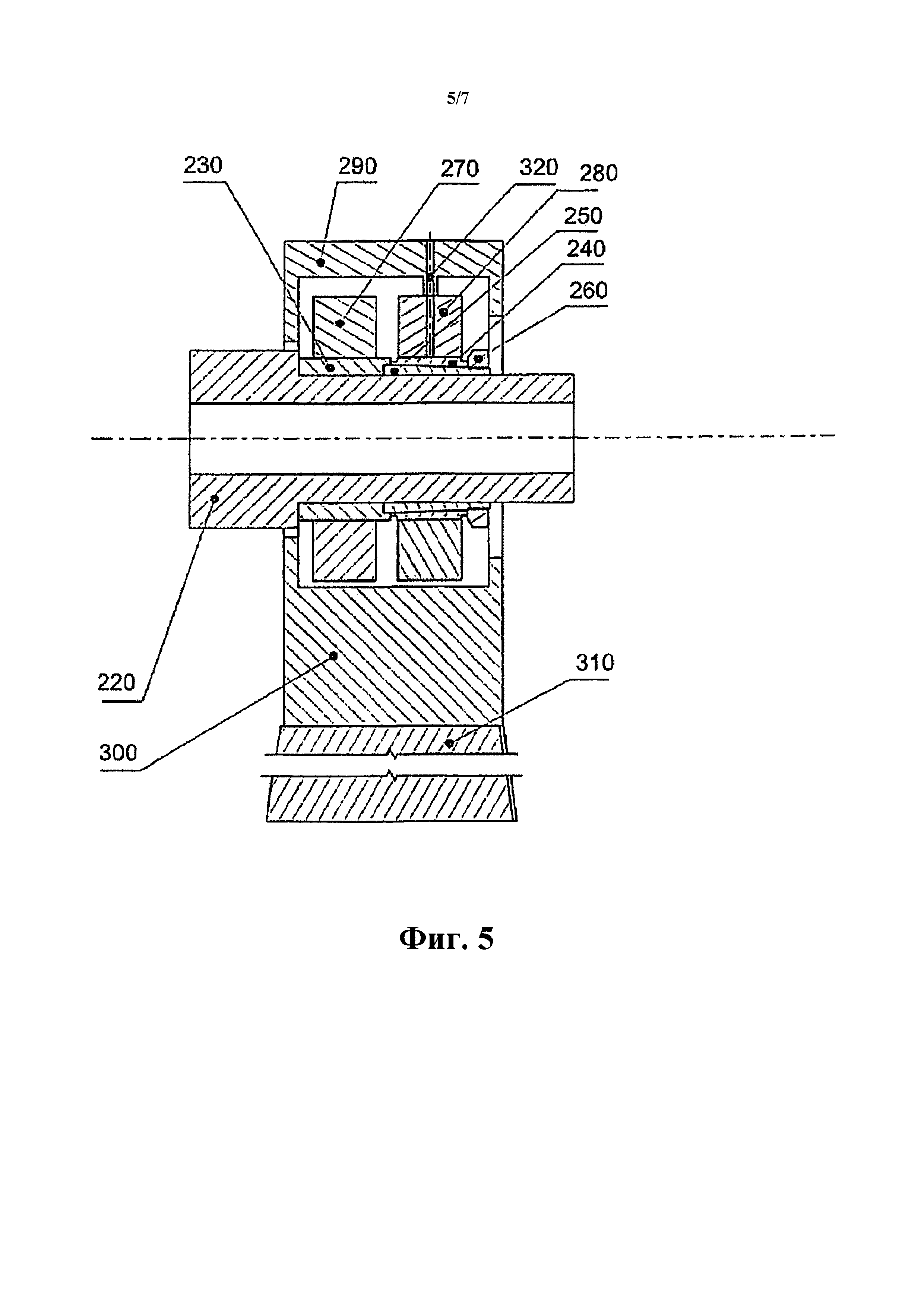
[0044] На фиг. 5 показана вертикальная проекция в поперечном сечении другого варианта осуществления настоящего изобретения, на которой изображен комбинированный подшипник скольжения, в котором магнитный подшипник окружает пластинчатый ротор и сохраняет подходящий собственный зазор, и шейка смонтирована в примыкании к АМВ и удерживает на месте пластины ротора с помощью альтернативного крепления.
[0045] На фиг. 6 показан покомпонентный вид варианта осуществления по фиг. 5, на котором показаны детали компонентов.
[0046] На фиг. 7 показана основная схема управления, используемая для управления активным магнитным подшипником с обратной-связью от состояний ротора и включающая характеристики подшипника скольжения.
Подробное описание изобретения
[0047] Настоящее изобретение представляет собой высокотехнологичный высокоэффективный комбинированный подшипник, объединяющий в одном комбинированном устройстве гидродинамический подшипник (FFB) и электромагнитный привод (ЕМА). Во всех случаях гидродинамический подшипник может нести нагрузку, тогда как электромагнитный привод может быть использован либо только в качестве устройства управления, либо как в качестве устройства управления, так и в качестве несущего элемента. В последнем случае электромагнитный привод можно рассматривать как активный магнитный подшипник (АМВ).
[0048] Объединение АМВ и JB в одном устройстве, называемом в настоящем документе комбинированным подшипником скольжения (IJB), обладает явными преимуществами. IJB обладает всеми преимуществами JB и АМВ и избегает всех недостатков АМВ и JB. IJB представляет собой улучшенный несущий элемент вследствие его большей несущей способности и способности вводить пассивное демпфирование в систему ротора. Более того, он не подвержен неустойчивостям вибрации и обладает возможностями устройства управления. IJB может обеспечивать переменные и управляемые жесткость и демпфирование и дополнительно может обеспечивать управление нарушением равновесия и множество других возможностей управления. Наиболее важно то, что, поскольку JB несет ротор во всех случаях, отсутствует необходимость в запасном подшипнике.
[0049] На фиг. 1 и фиг. 2 показан предпочтительный вариант осуществления IJB. В данном варианте осуществления АМВ пластины 40 ротора установлены на валу, тогда как наружные пластины 30 удерживаются на месте нижним корпусом 10 и верхним корпусом 60 IJB. Зазор АМВ фактически представляет собой зазор между пластинами 40 ротора и наружными пластинами 30. На роторе с обеих сторон от пластин 40 ротора размещены две муфты 80 подшипника скольжения. Вкладыш 70 подшипника скольжения, окружающий муфту 80, удерживается на месте корпусом 20 подшипника скольжения, удерживаемым на месте нижним корпусом 10 и верхним корпусом 60 IJB. Зазор подшипника скольжения находится между муфтой 80 и вкладышем 70. Масло подается и сливается через трубопроводы 120 и покрывает как подшипник скольжения, так и полости АМВ. Уплотнения 50 препятствуют выходу масла из полости. Для удерживания муфт 80 подшипника на месте на валу используются две фиксирующие муфты 90. Крепежный держатель 100 фиксируется на месте крепежной гайкой 110 на каждой фиксирующей муфте 90.
[0050] На фиг. 3 и фиг. 4 показан другой вариант осуществления IJB. В данном варианте осуществления АМВ пластины 180 ротора установлены на валу, тогда как наружные пластины 160 удерживаются на месте нижним корпусом 140 и верхним корпусом 150 IJB. Зазор АМВ фактически представляет собой зазор между пластинами 180 ротора и наружными пластинами 160. На роторе рядом с пластинами 180 ротора размещена одна муфта 190 подшипника скольжения. Вкладыш 130 подшипника скольжения, окружающий муфту 190, удерживается на месте нижним корпусом 140 и верхним корпусом 150 IJB. Зазор подшипника скольжения находится между муфтой 190 и вкладышем 130. Масло подается и сливается через трубопроводы 210 и покрывает как подшипник скольжения, так и полости АМВ. Для удерживания муфты 190 подшипника на месте на валу используется зажим 200. Следует отметить, что данный вариант осуществления подходит для валов с заплечиками, как показано на фиг. 3, где пластины 180 ротора опираются на заплечик вала и удерживаются на месте муфтой 190 скольжения, которая, в свою очередь, удерживается на месте зажимом 200.
[0051] Аналогичный вариант осуществления приведен на фиг. 5 и фиг. 6, однако с другим способом крепления пластин ротора и муфты скольжения. На фиг. 5 и фиг. 6 АМВ пластины 230 ротора установлены на валу, тогда как наружные пластины 270 удерживаются на месте нижним корпусом 300 и верхним корпусом 290 IJB. Зазор АМВ фактически представляет собой зазор между пластинами 230 ротора и наружными пластинами 270. Для удерживания пластин 270 ротора на месте используется удерживающая муфта 250. Муфта 240 подшипника скольжения вводится в удерживающую муфту 250 и удерживается на месте стопорной гайкой 260. Вкладыш 280 подшипника скольжения, окружающий муфту 240, удерживается на месте нижним корпусом 300 и верхним корпусом 290 IJB. Зазор подшипника скольжения находится между муфтой 240 и вкладышем 280. Масло подается и сливается через трубопроводы 320 и покрывает как подшипник скольжения, так и полости АМВ. Данный вариант осуществления также подходит для валов с заплечиками, как показано на фиг. 5, где пластины 230 ротора опираются на заплечик вала и удерживаются на месте удерживающей муфтой 250 и стопорной гайкой 260.
[0052] На фиг. 7 показана блок-схема системы IJB. Ротор подвергается действию внешних усилий Fext, однако состояния х и х' ротора влияют на JB, который, в свою очередь, обеспечивает несущее усилие Fb, слагаемое с магнитным несущим усилием Fm. Состояния х и х' обратной связи электронным образом направляются в программируемое устройство управления, которое доставляет ток через усилитель мощности в АМВ, таким образом вырабатывая магнитное усилие Fm.
[0053] Автор изобретения применил множество алгоритмов управления, аналогичных блок-схеме, приведенной на фиг. 7. В документе по ссылке 2 автор изобретения и его студенты обсуждают управление масляной вибрацией с использованием IJB при помощи множества алгоритмов и показывают, что управление демпфированием представляет собой эффективный способ управления IJB, в то время как в документе по ссылке 3 представляют управление неустойчивостью и управление нарушением равновесия с использованием IJB. Ссылка 4 представляет собой важную публикацию, в которой показано, что масло не оказывает отрицательного влияния на характеристики АМВ. Фактически показано, что масло в АМВ на самом деле обеспечивает некоторые небольшие улучшения характеристик АМВ. В документе по ссылке 5 приводится испытание ротора на одном IJB и одном подшипнике качения с использованием PID-регулятора, в документе по ссылке 6 приводится управление IJB с использованием нечеткой логики, и в документе по ссылке 7 приводится Н∞-управление IJB и обсуждается распределение нагрузки между АМВ и JB. В документе по ссылке 8 приводится испытание ротора на двух подшипниках IJB и способность преодоления неустойчивости, вызванной масляной вибрацией, в первом режиме и втором режиме путем применения PD-регулирования. Фактически, документ по ссылке 8 является явным указанием успешности IJB. В нем показано, что IJB способен нести ротор с высокой нагрузкой при высоких скоростях с возможностью управления множеством неустойчивостей.
[0054] Во всех вышеописанных экспериментах используется готовое программируемое устройство управления. Все алгоритмы управления, описанные в предыдущем абзаце, были реализованы экспериментально и являлись вполне успешными. Выбор алгоритма управления является вопросом выбора для каждого применения. Во многих случаях важно отдать команду магнитному подшипнику не препятствовать несению нагрузки JB. Фактически, Н∞-регулятор, приведенный в документе по ссылке 7, на самом деле стремится к несению некоторой части нагрузки на АМВ, тогда как PD-регулятор стремится действовать только в качестве устройства управления. Проблема заключается в том, что АМВ стремится центрировать ротор, тогда как JB стремится переместить центр ротора вниз и в сторону. Эти два конкурирующих устройства нуждаются в устройстве управления, рассчитанном на несение нагрузки на JB и сохранение всей мощности АМВ для управления. Несение нагрузки АМВ может допускаться только в особых обстоятельствах (таких как изменение положений резонансов). Вышеупомянутые ссылки предоставляют достаточное количество примеров применения устройства управления. Однако специалист в данной области техники может рационально выбрать подходящий алгоритм управления. Следует понимать, что предшествующее описание представляет собой лишь подробное описание одного или нескольких вариантов осуществления настоящего изобретения, и что многочисленные изменения раскрытых вариантов осуществления могут быть выполнены в соответствии с описанием настоящего документа в пределах сущности и объема настоящего изобретения. Предшествующее описание, таким образом, не подразумевается как ограничивающее объем изобретения. Вернее, объем изобретения должен определяться только приложенной формулой изобретения и ее эквивалентами.
Ссылки:
1) El-Shafei, A., 2010, «Methods of Controlling the Instability in Fluid Film Bearings», патент США №7836601.
2) El-Shafei, A., Dimitri, A.S., 2010, «Controlling Journal Bearing Instability Using Active Magnetic Bearing», ASME Trans., Journal of Engineering for Gas Turbine and Power, Vol. 132 Jan., No. 1.
3) Dimitri, A.S., El-Shafei, A., 2010, «Instability Control and Unbalance Compensation of Flexible Rotors Supported on Journal Bearings Using Magnetic Bearings», Proceedings of the 8th IFToMM International Conference on Rotordynamics September 12-15, KIST, Seoul, Korea.
4) El-Hakim, M., Dimitri, A.S, Sakr, Т., Mahfoud, J., Adly, A.A., El-Shafei, A., 2012, «Numerical and experimental identification of a combined Journal-Magnetic bearing: Smart Integrated Bearing», Proceedings of the 10th International Conference on Vibrations in Rotating Machinery, IMechE, London UK, p.399-407, 11-13 Sep.
5) El-Shafei, A., Dimitri, A.S., Saqr, Т., El-Hakim, M., «Test Rig Characterization and Dynamic Testing of a Smart Electro-Magnetic Actuator Journal Integrated Bearing», Proc. 9th IFToMM Int. Conf. on Rotordynamics, Sep. 22-25, Milan, Italy, 2014. Mechanisms and Machine Science Vol. 21, Springer.
6) Dimitri, A.S., Mahfoud, J., El-Shafei, A., 2015, «Oil Whip Elimination using Fuzzy Controller», J. Eng. Gas Turbines Power, Vol. 138, No. 6.
7) Dimitri, A.S., El-Shafei, A., Adly, A.A., Mahfoud, J., 2015, «Magnetic Actuator Control of Oil Whip Instability in Bearings», IEEE Transactions on Magnetics, Vol. 51, No. 11.
8) El-Shafei, A., Dimitri, A.S., Mahfoud, J., 2016, «PD Control of a Smart Electro-Magnetic Actuator Journal Integrated Bearing (IJB)», Proceedings the 11th IMechE International Conference on Vibrations in Rotating Machinery, Manchester, UK, September 2016, paper C1030, pp. 239-250.
Реферат
Изобретение относится к подшипникам скольжения и, в частности, к подшипникам скольжения, объединяющим в одно целое гидродинамический и магнитный несущие элементы. Комбинированный подшипник скольжения (IJB) содержит вал, проходящий в осевом направлении; корпус, через который в осевом направлении проходит вал, при этом корпус окружает вал в радиальном направлении; активный магнитный подшипник (АМВ), расположенный в корпусе и окружающий вал в радиальном направлении; и по меньшей мере первый гидродинамический подшипник скольжения (JB), расположенный в корпусе и окружающий вал в радиальном направлении. Первый JB находится в осевом примыкании к АМВ, и, таким образом, JB и АМВ не используют общий радиальный зазор совместно, однако, в то же время, они совместно погружены в масло. Устройство управления, находящееся в сигнальной связи с АМВ, может быть выполнено различными способами с возможностью подачи в него тока с целью приведения АМВ в действие посредством управления вырабатываемым им магнитным усилием. Технический результат: создание усовершенствованного подшипника для вращающихся машин, представляющего собой гидродинамический подшипник, объединенный в одно целое с электромагнитным приводом, которые ограничены в едином пространстве, заполненном маслом, и комбинированный подшипник активного магнитного подшипника, способного или не способного нести нагрузку. 3 н. и 22 з.п. ф-лы, 7 ил.
Формула
Документы, цитированные в отчёте о поиске
Способы управления неустойчивостью в гидродинамических подшипниках
Комментарии