Способы управления неустойчивостью в гидродинамических подшипниках - RU2399803C2
Код документа: RU2399803C2
Чертежи






































Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Данное изобретение относится к гидродинамическим подшипникам, в частности к управлению общеизвестной неустойчивостью в гидродинамических подшипниках путем применения магнитных подшипников и использования уникального способа, включающего использование преднамеренно смещенной цапфы в подшипнике.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Характерным признаком вибраций ротора является наличие ротора, который, по определению, должен вращаться, иногда с очень высокими скоростями, необходимыми для надлежащей работы машины. Вращение ротора имеет два наиболее существенных следствия. Одно из них состоит в том, что во вращающейся машине запасено огромное количество кинетической энергии. Если механизм позволяет переносить часть этой энергии от вращения к вибрации ротора, это неминуемо приводит к неустойчивости машины. Некоторыми механизмами, которые позволяют передавать энергию и приводят к неустойчивости вращающихся машин, являются внутреннее демпфирование, аэродинамическая взаимосвязь, уплотнения, высокоскоростные подшипники скольжения, подшипниковые узлы с демпфирующим устройством и т.д.
Другое следствие вращения - постоянное наличие возмущающей силы во вращающейся машине. Ротор всегда имеет некоторый остаточный дисбаланс; этот остаточный дисбаланс ускоряет ротор на различных скоростях и, возможно, приводит к критическим скоростям.
Наличие этих двух характерных особенностей вибраций ротора: неустойчивости и возбуждения дисбаланса, приводит к необходимости управления вибрациями ротора. Если этот процесс не будет контролироваться, возбуждение дисбаланса может привести к чрезмерной переданной силе; критические скорости могут привести к чрезмерной амплитуде колебаний, в то время как неустойчивость может привести к разрушению машины.
Со времен ранней работы Рэнкина (Rankine), который предположил, что машины никогда не будут в состоянии пересечь критические скорости, в разработке систем подшипников ротора произошел большой прогресс. В настоящее время высокоскоростные и высокоэффективные вращающиеся машины, такие как газовые турбины, компрессоры, паровые турбины, турбоэспандеры, турбонагнетатели и т.д., обычно пересекают целых шесть критических скоростей в течение своей работы в нормальном режиме.
Чтобы управлять вибрацией таких высокоскоростных машин, многие фирмы-производители турбин прибегают либо к пассивному, либо к активному контролю вибрации. Возможно, первым способом регулирования вибраций было внедрение гидродинамических подшипников в конце девятнадцатого века. Первое применение «бесконтактных» подшипников скольжения было встречено в то время как важный технический прорыв, при этом предполагалось, что они решат все проблемы вращающихся машин. Однако вскоре после этого стали очевидными проблемы подшипников скольжения и в целом всех гидродинамических подшипников. Две основные особенности гидродинамических подшипников несколько затмили успех их применения. Одна из них - тенденция подшипников скольжения вызывать завихрения масла и выброс масла из подшипника, которые могут быть разрушительными механизмами неустойчивости в подшипниковых системах ротора. Это привело к внедрению более сложных гидродинамических подшипников, типа эллиптического подшипника, подшипника с двумя масляными клиньями, подшипника с порогом, многоклинового гидродинамического подшипника и самоустанавливающегося сегментного подшипника, и, совсем недавно, гибкой опоры. Эти гидродинамические подшипники обеспечивают улучшенные характеристики устойчивости за счет более низкой грузоподъемности и пониженное демпфирование при критических скоростях.
Вторая проблема гидродинамических подшипников - их характеристики, зависящие от скорости. Жесткость и демпфирующие свойства гидродинамических подшипников зависят от числа Зоммерфельда, которое является безразмерным коэффициентом, показывающим отношение скорости к нагрузке. Трудность определения точной жесткости и демпфирующих свойств гидродинамических подшипников сохраняется и до настоящего времени как вследствие трудоемкости компьютерных гидродинамических расчетов (CFD) с использованием методов конечных разностей и конечных элементов, так и вследствие зависящих от скорости свойств, которые влияют на оценку критических скоростей роторов, установленных на гидродинамических подшипниках.
Большие тяжелые роторы должны использовать гидродинамические подшипники из-за их повышенной грузоподъемности. Однако более малые и более высокоскоростные роторы устанавливаются на подшипниках качения. К сожалению, подшипники качения не обеспечивают какого-либо контроля вибраций из-за их высокой жесткости и фактического отсутствия демпфирующих характеристик. Это не вызывало проблем в малых машинах типа электродвигателей, но с появлением газотурбинных реактивных двигателей, которые требовали использования высоких скоростей и легких роторов, стало очевидно, что авиационные двигатели нуждаются в способе управления вибрациями. Гидродинамические подшипники были исключены из рассмотрения как возможный способ управления в авиационных двигателях из-за неустойчивых явлений выброса смазочного масла, которые разрушительны для высокоскоростных двигателей.
В шестидесятых годах двадцатого века наконец произошло внедрение подшипниковых узлов с демпфирующим устройством и мягких опор как способа пассивного контроля вибраций. Подшипниковый узел с демпфирующим устройством представляет собой масляную пленку, окружающую наружное кольцо подшипника качения, вращение которого предотвращено, но оно может вибрировать. Таким образом, это устройство может быть классифицировано как класс гидродинамических подшипников без грузоподъемности или без неустойчивости, вызванной вращением. Подшипниковый узел с демпфирующим устройством позволял разработчикам авиационных двигателей ввести демпфирование во вращающейся машине в качестве способа контроля вибраций. Кроме того, введение мягкой опоры сделало возможным обоснованное применение критических скоростей. Таким образом, комбинация подшипникового узла с демпфирующим устройством и мягкой опоры предоставила разработчику способ пассивного управления вибрациями роторов посредством характеристик жесткости и демпфирования колебаний.
В восьмидесятых годах двадцатого века исследователи начали обыгрывать идею использования магнитных подшипников в качестве опоры для вращающихся машин. Эти исследования дали результаты для активного управления вибрациями вращающейся машины благодаря возможности активного управления жесткостью и демпфирующими свойствами магнитных подшипников путем управления силой тока, подаваемого к подшипникам. Кроме того, активное управление электромагнитными системами естественно и просто, вследствие простоты взаимодействия с компонентами системы управления.
В литературе имеется большое количество исследований, касающихся активного управления вращающимся оборудованием с использованием для этих целей магнитных подшипников. Фактически эти исследования - личные мнения и убеждения изобретателей в том, что магнитные подшипники, несмотря на их различные недостатки, вероятно, являются лучшим способом для управления вибрациями в наземных механизмах.
Магнитные подшипники могут обеспечить плавно регулируемую жесткость и демпфирующие свойства для активного контроля вибраций, добавляя к этому бесконтактные характеристики, а также большую грузоподъемность и возможность использования машины без масла, при этом ясно, что магнитные подшипники, судя по всему, представляют собой лучший выбор для опор и активного управления вибрациями вращающейся машины.
Однако магнитные подшипники имеют различные недостатки. К ним относятся: стоимость магнитных подшипников, которые значительно дороже традиционных подшипников; цена отказа, который, вероятно, означал бы полную замену машины; вес больших подшипников и связанных средств управления; чувствительность магнитных подшипников к высоким температурам; необходимость подтверждения их надежности, а также необходимость устанавливать параллельную систему опор, называемую "подшипником-улавливателем", чтобы поддерживать ротор в случае неполадок.
Эти недостатки влияют на применение магнитных подшипников в авиационных двигателях, и до настоящего времени, имея более двадцати лет активных научных исследований, магнитные подшипники ни разу не были использованы в авиационных двигателях. Однако многие вращающиеся машины, особенно модернизированные компрессоры, эксплуатировались с магнитными подшипниками и имели значительный успех.
Происхождение неустойчивости гидродинамических подшипников.
В своей превосходной научной статье И.Хори (Y.Hori) в 1959 году дал теорию выброса масла из подшипника и описал происхождение неустойчивости гидродинамического подшипника. Согласно Хори, на явления масляных вихрей и выбросов масла указывалось уже в 1925 году. Проблема неустойчивости подшипника, несмотря на свою давность, все же является актуальной и по сей день. Г.Керк (G.Kirk) в 2003 году объяснил, что суть проблемы сводится, по существу, к ответу на следующие два вопроса: "Есть ли какие-либо возможности, чтобы роторное устройство могло переходить критическую скорость? Может ли роторное устройство функционировать выше этой критической скорости?". Эти два вопроса служат также мотивацией и для данной работы, представленной здесь, в дополнение к необходимости исследования параметров, которые влияют на возникновение процесса неустойчивости.
Возможно, научный интерес в изучении устойчивости гидродинамических подшипников неизменяемой геометрии лежит в их историческом значении. Они давали возможность конструировать вращающиеся машины в девятнадцатом столетии. В своей книге по теории смазки, Д.Д.Фуллер (D.D.Fuller) фактически полагает, что гидродинамический подшипник является, вероятно, единственным самым важным элементом современного технологического прогресса, сопоставимым по своему значению только с действием электричества. Первые гидродинамические подшипники были разработаны как устройства для восприятия нагрузки, и считались устройствами с низким коэффициентом трения, приспособленными, возможно, к безостановочной работе машины. Однако в связи с увеличившимися скоростями вращения машин, в двадцатом столетии стало очевидно, что сам подшипник скольжения может вызвать явления масляных вихрей и выбросов масла. Это заставило многих исследователей экспериментально и теоретически исследовать процессы масляных вихрей и выбросов масла.
В своей статье Хори объясняет основные результаты экспериментальных исследований, опубликованные в то время. Хори сообщает, что Б.Л.Ньюкерк (B.L.Newkirk) и Дж.Ф.Льюис (J.F.Lewis) в 1956 году опубликовали экспериментальные данные, согласно которым частота вращения достигала скорости, в пять или шесть раз превышающую первую критическую скорость, прежде, чем возникала неустойчивость; в то же время О.Пинкус (O.Pinkus) в 1953 и 1956 годах опубликовал данные, в которых сообщалось, что вибрации исчезали и возобновлялись снова, а случаи устойчивых и неустойчивых режимов отделяются областями переходного состояния с вибрацией. Согласно Хори, эксперименты Ньюкерка и Пинкуса были во многих смыслах противоречивыми, даже относительно эффекта температуры. Ньюкерк и Льюис сообщали, что более горячее масло обеспечивает больший диапазон устойчивого режима работы, в то время как эксперименты Пинкуса, опубликованные в 1956 году, показывали, что больший диапазон устойчивого режима работы обеспечивает более холодное масло. И.Хори в 1959 создал теорию выброса масла, пытаясь объяснить расхождение результатов Ньюкерка и Пинкуса.
С тех пор, в шестидесятых и семидесятых годах, была проведена значительная работа над альтернативными конструкциями гидродинамических подшипников, чтобы иметь возможность управлять неустойчивостью. Кроме того, значительные усилия были вложены в вычисление линеаризованных коэффициентов подшипника и в прогнозирование динамической характеристики ротора.
В восьмидесятых годах вновь возобновился интерес к явлениям неустойчивости подшипника скольжения. А.Масзинска (A.Muszynska) выполнила обширные испытания на подшипнике скольжения, поддерживающем роторы. Она продемонстрировала присутствие вихря второго типа. Кроме того, в восьмидесятых годах, были сделаны большие продвижения в понимании динамики нелинейных систем подшипников скольжения путем анализа при помощи теории бифуркации и бифуркации Хопфа.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Одним вариантом выполнения данного изобретения является комбинированный магнитно-гидродинамический подшипник; другим вариантом выполнения является устойчивый гидродинамический подшипник.
Комбинированный магнитно-гидродинамический подшипник
Как было рассмотрено в разделе, относящемся к предпосылкам изобретения, магнитные подшипники являются, по всей вероятности, лучшей опорой для вращающихся машин. Однако их недостатки, главным образом касающиеся надежности, препятствуют их использованию во многих системах, особенно в авиационных двигателях. Кроме того, как обсуждалось выше, гидродинамические подшипники имеют неустойчивость, которая препятствует их использованию в высокоскоростных системах.
Изобретение фактически основывается на преимуществах и недостатках обоих типов описанных устройств. Изобретение состоит в использовании гидродинамического подшипника (не имеет значения, является ли он цилиндрическим подшипником скольжения, эллиптическим подшипником, подшипником с двумя масляными клиньями, многоклиновым гидродинамическим подшипником или подшипником с самоустанавливающимися сегментами) в качестве подшипника, несущего основную нагрузку, и использовании магнитного подшипника в комбинации с гидродинамическим подшипником для управления неустойчивостью. Эта комбинация должна быть весьма эффективным решением, приводящим к подшипникам, которые могут быть использованы на высоких скоростях, не имея проблем со стабильностью и надежностью.
Многие патенты относятся к магнитным подшипникам, например:
Однако ни в одном из этих патентов не обсуждается использование магнитных подшипников как средств управления неустойчивостью подшипников скольжения. Фактически, большинство известных и современных опытно-конструкторских разработок в области магнитных подшипников касаются использования магнитных подшипников в качестве элемента, несущего основную нагрузку, и использования добавочного управляющего воздействия для обеспечения некоторых необходимых преимуществ по стабильности во вращающихся машинах.
Также, многие патенты относятся к гидродинамическим подшипникам, например,
Однако ни в одном из этих патентов не предполагается использование магнитных подшипников как средств управления нестабильностями жидкостной пленки.
Фактически, разработка магнитных подшипников и разработка гидродинамических подшипников - две совершенно независимые области, и исследователи, работающие в каждой из этих областей, не оценивают разработки в другой области, как будто это совершенно их не касается.
Патент США №6353273, озаглавленный «Гибридный магнитный подшипник - мягкая опора» является исключением. В этом изобретении предполагается, что и гибкая опора, и магнитный подшипник используются как воспринимающие нагрузку элементы. Можно сделать так, чтобы воспринимать большую нагрузку, благодаря тому, что и гибкая опора, и магнитный подшипник несут часть нагрузки. Однако это, по мнению изобретателя, далеко не удачное решение. Гибридный магнитный подшипник - мягкая опора, хотя и способен к эксплуатации на высоких скоростях, все же страдает от тех же самых недостатков магнитных подшипников.
Хотя гидродинамические подшипники и магнитные подшипники являются общеизвестными устройствами, все же не очевидно, что они могут быть использованы в комбинированной форме, так как современная технология рассматривает их как конкурирующие и не дополняющие друг друга устройства. Оба типа подшипников считаются устройствами, несущими нагрузку, которые имеют определенную возможность управления неустойчивостью (пассивное управление для гидродинамических подшипников и активное управления для магнитных подшипников). Данное изобретение, таким образом, рассматривает магнитный подшипник только как регулирующее устройство, а гидродинамический подшипник только как устройство, воспринимающее нагрузку. Их совместное применение дает возможность иметь подшипники с преимуществами большой грузоподъемности, превосходной надежности, и использования на высоких скоростях без явлений неустойчивости, в дополнение ко всем известным преимуществам гидродинамических подшипников и магнитных подшипников. Кроме того, появляется дополнительное преимущество: поскольку магнитный подшипник не используется как несущий нагрузку элемент, требуемая мощность тока будет ниже, и, таким образом, могут быть использованы более малые и легкие магнитные подшипники, что позволяет надежно управлять вибрациями ротора.
Эта комбинация может иметь вид двух смежных или несмежных подшипников; одного гидродинамического, а другого магнитного; или же она может иметь форму одного составного подшипника, содержащего гидродинамический подшипник внутри магнитного подшипника, такой, что жидкость для гидродинамического подшипника проходит через ротор магнитного подшипника, в зазоре между ротором и статором магнитного подшипника.
Однако в этом случае появляется конструктивная проблема, так как магнитный подшипник требует большого зазора для рассеивания выделяемой теплоты, а гидродинамический подшипник требует малого зазора для лучшей грузоподъемности. Эту конструктивную проблему можно решить двумя способами, один из которых заключается в выборе компромиссного зазора между двумя противоречивыми требованиями, а другой состоит в использовании малого зазора для восприятия нагрузки в гидродинамическом подшипнике и использовании увеличенного потока жидкости для рассеивания выделяемой теплоты в магнитном подшипнике.
Устойчивые гидродинамические подшипники
Как обсуждалось выше, гидродинамические подшипники имеют проблемы неустойчивости, называемые масляными вихрями и выбросами масла. Многие патенты описывают способы разработки гидродинамических подшипников, которые являются более устойчивыми, например:
Однако все эти патенты, включая самоустанавливающийся сегментный подшипник, являющийся самым устойчивым гидродинамическим подшипником, имеют общее свойство, которое состоит в возмущении потока в направлении по периферии, чтобы управлять неустойчивостью (или, в случае гибкой опоры, в использовании упругого взаимодействия совместно с жидкостной пленкой). Журнал трибологии издательства Американского общества инженеров-механиков (ASME Journal of Tribology), том 126, стр.125-131 (2004) фактически описывает исследование по получению оптимальной конфигурации кольцевого зазора для улучшения характеристик устойчивости гидродинамических подшипников. Тем не менее, никто не задумывался о попытке возмущать поток в осевом направлении, чтобы управлять неустойчивостью подшипника.
Изобретатель настоящей изобретения провел эксперименты, в которых угловое смещение осей валов фактически устраняло неустойчивость в цилиндрических подшипниках скольжения, которые, как известно, имеют проблему неустойчивости. Об этих экспериментах сообщалось в статье, представленной изобретателем в трудах Американского общества инженеров-механиков Turbo Expo, Вена, Австрия, статья GT-2004-53644, которая дана здесь в виде ссылки. Предпубликационная копия этой статьи была подана и интегрирована в американскую заявку на предварительный патент США 60/579866, зарегистрированный 15 июня 2004, согласно которому заявляется приоритет. Идея этой статьи отличается от способов современной техники, согласно которым наличие точной центровки валов, как полагают, является правильным способом для всех вращающихся машин. Фактически, патент США №4033042, названный "Прибор и способ центрирования валов", описывает способы улучшения выравнивания между осями роторов при их соединении.
Изобретение, описанное здесь, является весьма простым и понятным. Идея состоит в том, чтобы возмущать поток в осевом направлении, уменьшая, таким образом, неустойчивость. В его самой простой форме, подшипник скольжения изготавливается таким, что ось подшипника имеет перекос относительно оси вала. Таким образом, ось вала является горизонтальной, в то время как ось подшипника наклонена в вертикальном направлении с заданным углом наклона. Один конец подшипника находится ниже оси вала, в то время как другой конец находится выше этой оси. То же самое изобретение применяется для подшипников с неизменяемой геометрией, но в горизонтальной направлении. Ось подшипника наклонена в сторону (вправо), давая, таким образом, определенное горизонтальное смещение в подшипнике.
В другом варианте выполнения подшипник с изменяемой геометрией допускает угловое смещение осей. Основная идея весьма проста. Предположим, что заданный наклон для подшипников заранее не известен и требует регулировки в условиях эксплуатации. В этом случае, рассмотрим простой цилиндрический подшипник скольжения, в котором крепежные болты могут перемещаться по пазам так, что можно создать перекос всего цилиндрического подшипника скольжения (или гидродинамического подшипника любого типа), в результате чего ось подшипника получает определенный наклон к оси вала, который может быть отрегулирован. Когда соответствующий наклон выбран, крепежными болтами фиксируют корпус подшипника (и пазы) к опорной раме или основанию.
Вышеописанные варианты выполнения являются самыми простыми формами изобретения, которые подтверждены экспериментами и описаны в вышеупомянутой технической статье, представленной в трудах Американского общества инженеров-механиков 2004 Turbo Expo Power для Земли, Моря и Воздуха 15 июня 2004.
Однако данное изобретение является ключевым для многих других возможностей в проектировании гидродинамических подшипников. Оно предусматривает, например, введение двух половин вкладыша подшипника, просто создавая асимметрию между верхней и нижней частями (в отличие от современной техники, где половины вкладыша смещены горизонтально). Другие варианты выполнения включают введение эллиптической, многоклиновой прижимной перегородки, а также сегментов в осевом, а не в радиальном направлении, как диктует современная техника. Любая возможность изменения или возмущения потока вдоль оси подшипника для управления масляным завихрением и выбросом масла является вариантом выполнения данного изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На прилагаемых чертежах:
Фиг.1 является продольным разрезом одного варианта выполнения изобретения, показывающим смежные магнитную опору и подшипник скольжения ротора;
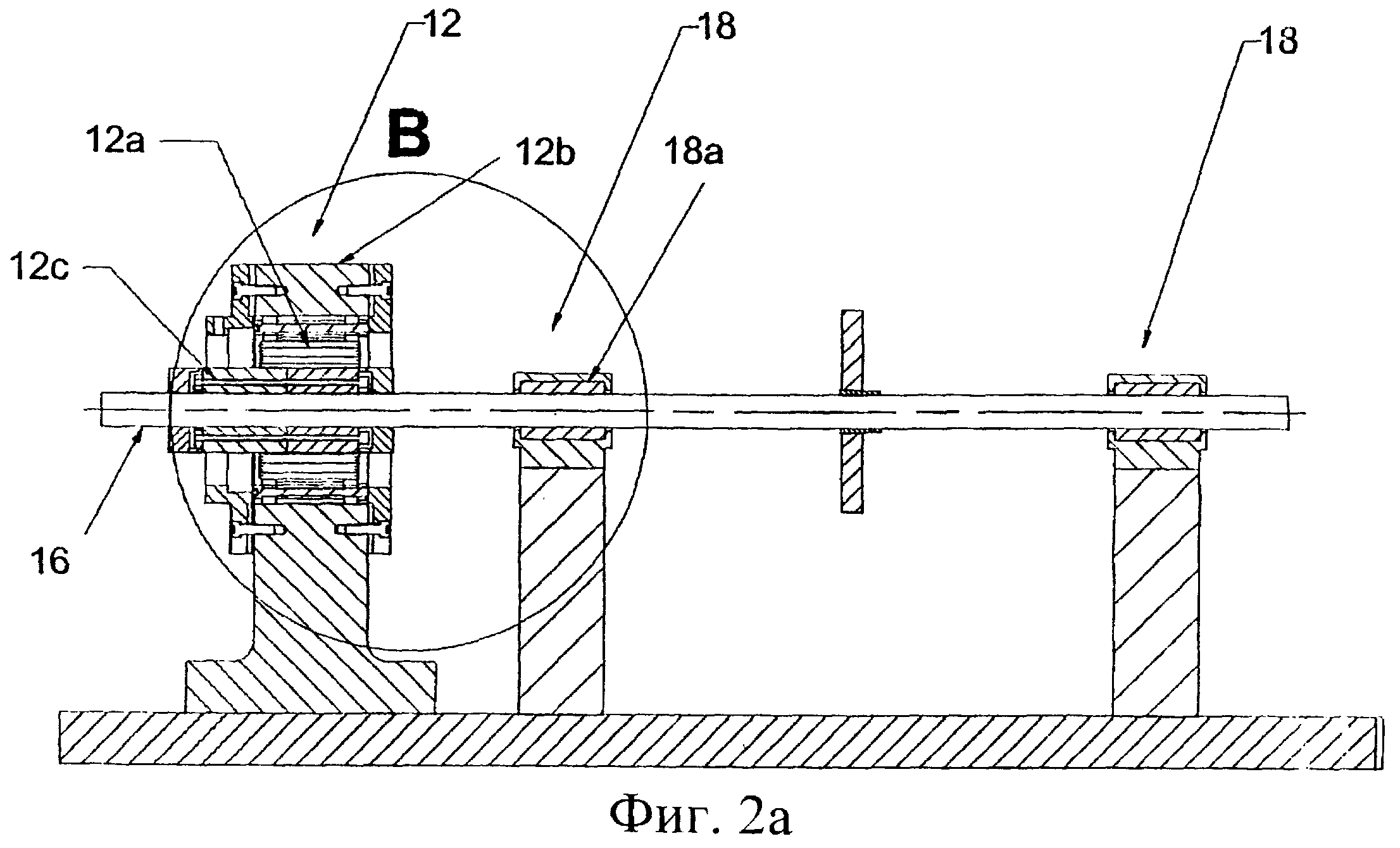
Фиг.2 является продольным разрезом другого варианта выполнения изобретения, показывающим не смежные магнитную опору и подшипник скольжения ротора;
Фиг.2b является увеличенным видом участка В на фиг.2а;
Фиг.3 является продольным разрезом другого варианта выполнения изобретения, показывающим совмещенный магнитно-гидродинамический подшипник;
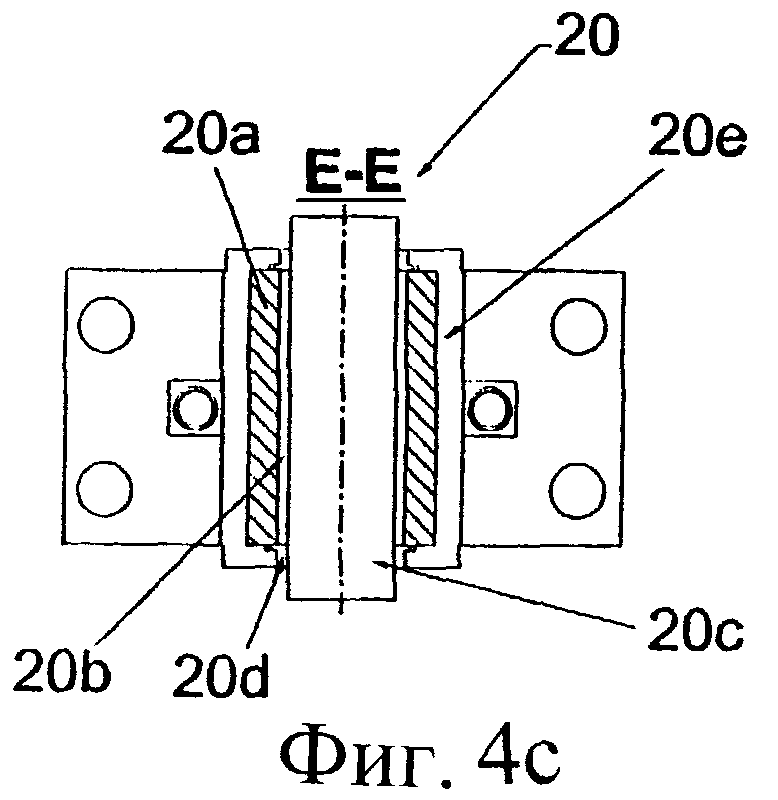
Фиг.4а-4с показывают вариант выполнения изобретения с вертикально наклоненным узлом неизменяемой геометрии;
Фиг.5а-5а показывают вариант выполнения изобретения с горизонтально наклоненным узлом неизменяемой геометрии;
Фиг.6а-6с показывают вариант выполнения изобретения с самоустанавливающимся подшипником;
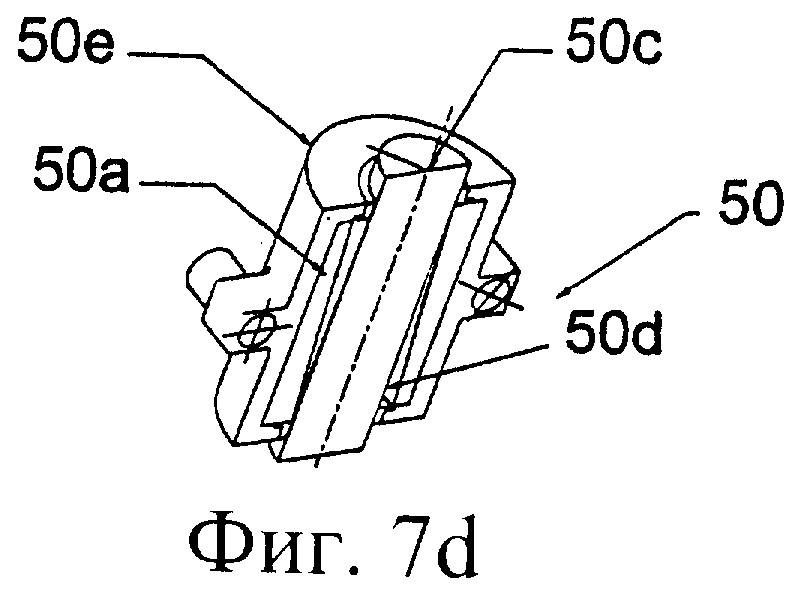
Фиг.7а-7е показывают вариант выполнения изобретения с самоустанавливающейся верхней половиной подшипника;
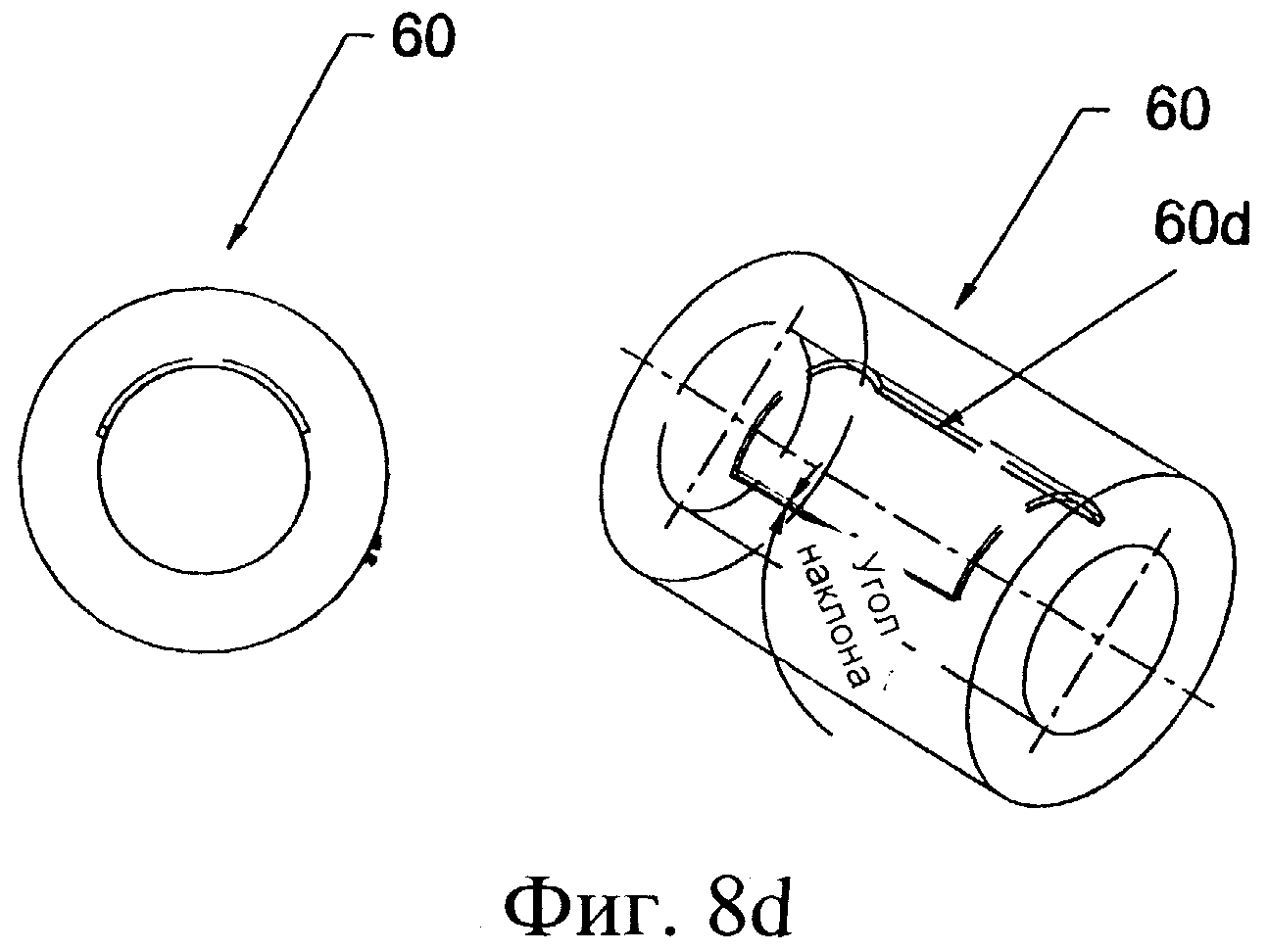
Фиг.8а-8d показывают вариант выполнения изобретения с наклоненным подшипником с порогом;
Фиг.9а-9s показывают вариант выполнения изобретения с наклоненным многоклиновым подшипником;
Фиг.10а-10с показывают вариант выполнения изобретения с подшипниковым узлом вогнутого профиля;
Фиг.11а-11d показывают вариант выполнения изобретения с подшипниковым узлом выпуклого профиля;
Фиг.12а-12а совместно показывают вариант выполнения изобретения с подшипниковым узлом сужающегося профиля;
Фиг.13а-13d показывают вариант выполнения изобретения с подшипниковым узлом расширяющегося профиля;
Фиг.14а-14d показывают вариант выполнения изобретения с сегментным подшипником;
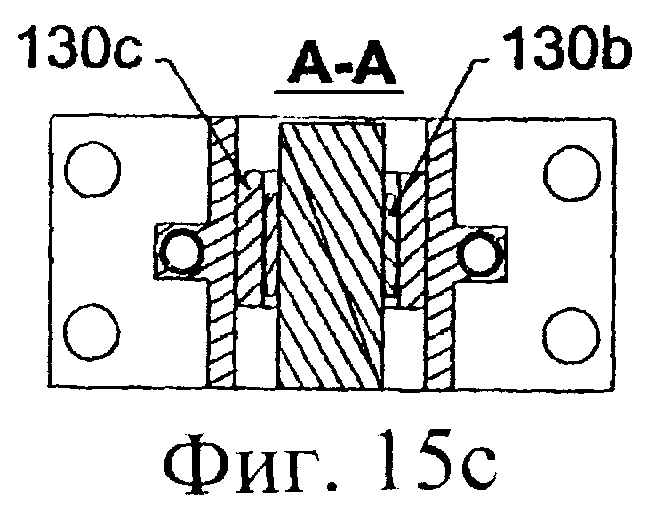
Фиг.15а-15d показывают вариант выполнения изобретения с сегментным подшипником, сегменты которого расположены в направлении оси подшипника и/или имеют выпуклый профиль;
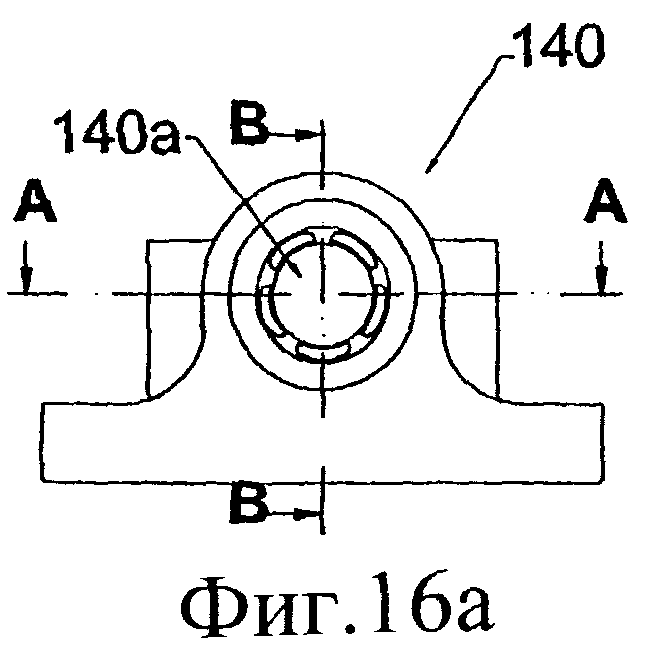
Фиг.16а-16d показывают вариант выполнения изобретения с сегментным подшипником, сегменты которого расположены в направлении оси подшипника и/или имеют вогнутый профиль;
Фиг.17а-17d показывают вариант выполнения изобретения с сегментным подшипником, сегменты которого закручены в направлении оси подшипника; и
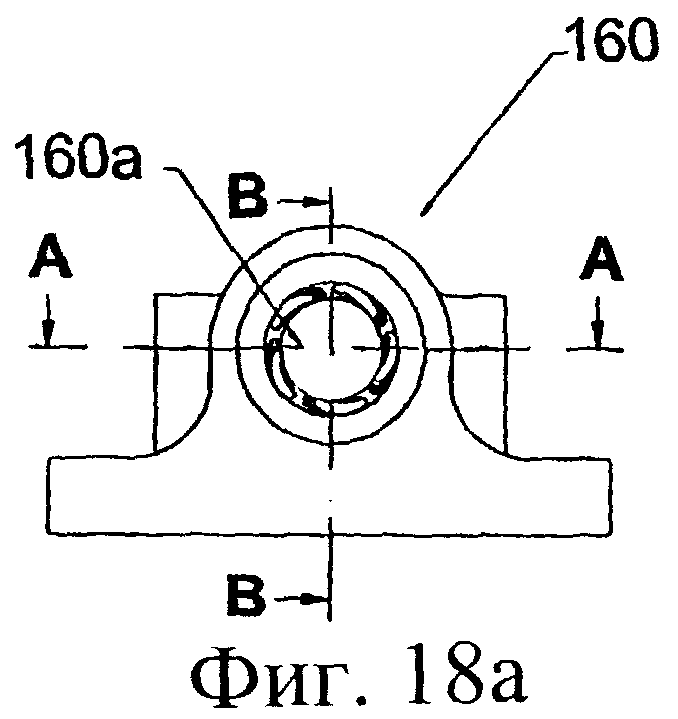
Фиг.18а-18d показывают вариант выполнения изобретения с сегментным подшипником, сегменты которого имеют ступенчатую форму в направлении оси подшипника.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Изобретение предлагает способ управления неустойчивостью в гидродинамических подшипниках путем использования магнитного подшипника в комбинации с гидродинамическим подшипником (причем не имеет значения, является ли гидродинамический подшипник цилиндрическим подшипником скольжения, эллиптическим подшипником, подшипником с двумя масляными клиньями, многоклиновым гидродинамическим подшипником, гибкой опорой или подшипником с самоустанавливающимися сегментами), согласно которому гидродинамический подшипник служит для принятия основной нагрузки, а магнитный подшипник управляет неустойчивостью гидродинамического подшипника. Эта эффективная комбинация в результате дает подшипники, которые могут быть использованы на высоких скоростях, не имея проблем со стабильностью и надежностью. Альтернативный способ управления неустойчивостью в гидродинамических подшипниках заключается в возмущении потока в осевом направлении; например, подшипник скольжения может быть изготовлен так, что ось подшипника имеет перекос относительно оси вала, или может быть изготовлен подшипник с изменяемой геометрией, обеспечивающий угловое смещение осей в подшипнике.
На фиг.1-3 изображены различные варианты выполнения комбинированного магнитно-гидродинамического подшипника, в смежном, несмежном и совмещенном вариантах конструкции, соответственно.
На фиг.1 показана конструкция смежного варианта. На разрезе, изображенном на фиг.1, узел 12 магнитного подшипника содержит электромагнитный статор 12а, установленный в корпусе 12b и используемый для управления ротора 12с, установленного на валу 16. Несущим нагрузку элементом является узел 18 гидродинамического подшипника, поддерживаемый корпусом 18а. Нагрузка воспринимается гидродинамическим подшипником 18, в то время как магнитный подшипник 12 используется для управления неустойчивостью, которая имеет место в гидродинамическом подшипнике 18 на высоких скоростях.
На фиг.2а-2b показана конструкция несмежного магнитно-гидродинамического подшипника. На фиг.2а изображен вертикальный разрез, где узел магнитного подшипника 12 содержит электромагнитный статор 12а, установленный в корпусе 12b и используемый для управления ротора 12с, установленного на валу 16. Несущим нагрузку элементом является узел гидродинамического подшипника 18, поддерживаемый корпусом 18а. Нагрузка воспринимается гидродинамическим подшипником 18, в то время как магнитный подшипник 12 используется для управления неустойчивостью, которая имеет место в гидродинамическом подшипнике 18 на высоких скоростях. На фиг.2b показан детально статор магнитного подшипника 12а с обмотками, ротор 12с, корпус 12b и вал 16. Основное различие между фиг.1 и 2 состоит в том, что на фиг.1 магнитный подшипник и гидродинамический подшипник примыкают друг к другу (находятся близко друг от друга), в то время как на фиг.2 магнитный подшипник и гидродинамический подшипник не примыкают друг к другу (находятся относительно далеко друг от друга).
На фиг.3 показана конструкция совмещенного узла магнитный подшипник - гидродинамический подшипник 14. На фиг.3 изображен вертикальный разрез, где показан магнитный подшипник 14d, содержащий электромагнитный статор 14а, установленный в корпусе 14b и используемый для управления ротором 14с, установленным на валу 16. Несущим нагрузку элементом является узел гидродинамического подшипника 14е, в котором жидкостная пленка заполняет зазор между статором 14а и ротором 14 с. Нагрузка воспринимается гидродинамическим подшипником 14е, в то время как магнитный подшипник 14d используется для управления неустойчивостью, которая имеет место в гидродинамическом подшипнике 14е на высоких скоростях. Эта конфигурация является компактным решением, в котором гидродинамический подшипник 14е объединен с магнитным подшипником 14d.
На фиг.4-18 изображены различные варианты конструкции устойчивого гидродинамического подшипника, включая вертикально наклоненный подшипник неизменяемой геометрии, горизонтально наклоненный подшипник неизменяемой геометрии, самоустанавливающийся подшипник, подшипник с самоустанавливающейся верхней половиной, самоустанавливающийся подшипник с порогом, самоустанавливающийся многоклиновый подшипник, подшипник вогнутого профиля, подшипник выпуклого профиля, подшипник сужающегося профиля, подшипник расширяющегося профиля, аксиально самоустанавливающийся сегментный подшипник и его варианты.
Пример варианта выполнения вертикально самоустанавливающегося подшипникового узла с неизменяемой геометрией 20 показан на фиг.4а-4с. Подшипник 20а вертикально наклонен, чтобы способствовать устойчивости системы (см. сечение С-С на фиг.4b). Жидкостная пленка 20b воспринимает нагрузку вала 20с в подшипнике 20а и имеет уплотнение 20а. Две половины корпуса, нижняя часть корпуса 20е и верхняя часть корпуса 20f, являются частями подшипникового узла 20 и поддерживают подшипник 20а. Ось 20g вала в этом случае для горизонтальной машины горизонтальна, а сам подшипник наклонен в вертикальной плоскости, чтобы способствовать гидродинамической устойчивости узла.
Пример варианта выполнения горизонтально наклоненного подшипникового узла 30 показан на фиг.5а-5d. Подшипник 30а горизонтально наклонен, чтобы способствовать устойчивости системы (см. сечение В-В на фиг.6с). Жидкостная пленка 30b воспринимает нагрузку вала 30с в подшипнике 30а и имеет уплотнение 30а. Две половины корпуса, нижняя часть корпуса 30е и верхняя часть корпуса 30f, являются частями подшипникового узла 30 и поддерживают подшипник 30а. На фиг.6а схематично показаны две половины корпуса подшипника с горизонтальным наклоном. Ось 30g вала в этом случае для горизонтальной машины горизонтальна, а сам подшипник наклонен в горизонтальной плоскости, чтобы способствовать гидродинамической устойчивости узла.
На фиг.6а-6с показан вариант узла 40 самоустанавливающегося подшипника. Подшипник 40а является прямым, а корпус, содержащий нижнюю часть 40b и верхнюю часть 40с, выполнен с возможностью регулировки. Два болта 40d с каждой стороны корпуса используются для закрепления корпуса на основании. Искривленный паз в частях 40b и 40 с корпуса предназначен для болта 40d. Ослабляя болты 40d, можно повернуть части 40b и 40с корпуса (и, следовательно, подшипник 40а) относительно вала 40е, а затем снова затянуть болты, чтобы зафиксировать необходимый угол поворота подшипника. Масляная пленка 40g показана на фиг.6с. Она должна способствовать устойчивости регулируемого подшипника, который может иметь отрегулированное угловое смещение осей.
На фиг.7а-7е показан пример варианта выполнения конструкции верхней самоустанавливающейся половины подшипникового узла 50. В этом варианте выполнения конструкции только верхняя половина подшипника 50а наклонена и смещена под углом к оси вала 50с, в то время как нижняя половина подшипника 50b расположена обычным образом. Это лучше всего видно на фиг.7d и 7е. На этих двух последних чертежах изображены также масляная пленка 50а и верхняя и нижняя части 50е и 50f корпуса. На самом деле, современная техника учитывает возможность смещения верхней половины, однако в заявленном изобретении верхняя половина 50а наклонена (создан перекос оси к оси вала). На самом деле, на чертежах изображен подшипник, имеющий верхнюю половину 50а, которая одновременно смещена относительно вала и наклонена к нему.
На фиг.8а-8d показан пример варианта выполнения конструкции устанавливаемого под углом подшипникового узла 60 с порогом. Этот подшипник 60а является по существу цилиндрическим подшипником, но с порогом 60d. Назначение порога состоит в возмущении потока и нагрузки подшипника, для улучшения, таким образом, его характеристик устойчивости. Современная техника использует такие пороги в подшипниках. Однако особенность заявленного изобретения состоит в том, что в пороге имеются наклонные относительно оси 60с вала 60b края, что обеспечивает угловую нагрузку и возмущение осевого потока. Сечение А-А, изображенное на фиг.8b и показанное на фиг.8с в увеличенном масштабе, показывает порог. Масляная пленка на фиг.8с обозначена номером позиции 60е. Детали порога с наклонными краями показаны на фиг.8d.
На фиг.9a-9d показан пример варианта выполнения узла 70 с устанавливаемым под углом многоклиновым подшипником. В современной технике применяется многоклиновой гидродинамический подшипник 70а, имеющий несколько масляных клиньев, каждый из которых имеет центр кривизны в разных местах, обеспечивая, таким образом, периферийное возмущение потока и повышение устойчивости. Этим многоклиновой подшипник отличается от цилиндрического подшипника, масляный клин которого имеет только один центр кривизны. Многоклиновой гидродинамический подшипник может иметь два масляных клина (эллиптический подшипник, в котором верхние и нижние половины имеют два разных центра), три клина, четыре клина (как показано на фиг.9а-9d), или более. Наше требование к изобретению состоит в том, чтобы каждый масляный клин не только имел свой собственный центр кривизны (см. номер позиции 70b на фиг.9d), но также был наклонен относительно оси так, чтобы возмущать поток в осевом направлении, как это ясно проиллюстрировано на фиг.9d и на сечениях А-А и В-В, приведенных, соответственно, на фиг.9b и 9с.
Идеи возмущения потока в осевом направлении могут быть реализованы также в подшипниках сужающегося профиля, подшипниках расширяющегося профиля, подшипниках вогнутого профиля, или в подшипниках выпуклого профиля. В современной технике нет подобных подшипников, но такие варианты выполнения могут улучшить устойчивость подшипников благодаря возмущению осевого потока.
Как было упомянуто выше, эти варианты выполнения проиллюстрированы следующим образом: узел 80 подшипника вогнутого профиля (фиг.10а-10с), узел 90 подшипника выпуклого профиля (фиг.11а-11d), узел 100 подшипника сужающегося профиля (фиг.12а-12d), и узел 110 подшипника расширяющегося профиля (фиг.13а-13d). Во всех этих узлах подшипника соответствующие подшипники 80а, 90а, 100а, 110а имеют осевое возмущение потока, соответствующее названию этого подшипника, относительно соответствующего вала 80b, 90b, 100b, 110b.
Другим вариантом выполнения изобретения является узел 120 сегментных подшипников. Конструкция этих подшипников предполагает наличие нескольких сегментов 120b, которые располагаются по окружности вала и могут колебаться относительно него, возмущая, таким образом, поток в периферическом направлении. На фиг.14а-14d проиллюстрирован этот вариант выполнения, который допускает значительное колебание в осевом направлении, возмущая, таким образом, поток в осевом направлении. На фиг.14а показаны сегменты 120b, которые выполнены с возможностью колебания в осевом направлении в наружном корпусе 120с.
Для дальнейшей иллюстрации возмущения осевого потока в самоустанавливающихся сегментных подшипниках приведены фиг.15, 16, 17 и 18, демонстрирующие прочие варианты выполнения изобретения. На фиг.15а-15d показан узел 130 сегментного подшипника с сегментом 130b выпуклого профиля, который колеблется на подшипнике 130с в осевом направлении и/или имеет выпуклый профиль в осевом направлении, а на фиг.16а-16d показан узел 140 сегментного подшипника с сегментом 140b вогнутого профиля, который колеблется на подшипнике 140с в осевом направлении и/или имеет вогнутый профиль в осевом направлении. На фиг.17а-17d показан узел 150 сегментного подшипника с закрученным в направлении оси подшипника сегментами 150b, a на фиг.18а-18d показан узел 160 сегментного подшипника с имеющими ступенчатую форму в направлении оси подшипника сегментами 160b.
Эти варианты выполнения являются различными вариантами выполнения данного изобретения, которые обеспечивают последовательно повышающуюся устойчивость путем возмущения осевого потока.
Данное изобретение может также быть применено к гибким опорам с использованием концептуальных вариантов выполнения, описанных выше. Варианты выполнения, описывающие идеи возмущения осевого потока, могут быть применены к гибким опорам, с организацией возмущения осевого потока путем его закручивания или наклона, как это обсуждалось выше.
Необходимо понимать, что все вышеизложенное является лишь подробным описанием одного или более вариантов выполнения данного изобретения и что в вариантах выполнения могут быть сделаны многочисленные изменения в соответствии с описанием, без отступления от сущности и объема изобретения. Предшествующее описание, поэтому, не предназначено для ограничения объема изобретения. Объем изобретения определяется только прилагаемыми пунктами формулы изобретения и их эквивалентами.
Реферат
Изобретение относится к гидродинамическим подшипникам. Способ управления неустойчивостью гидродинамических подшипников, включающих гидродинамические подшипники, используемые в узлах высокоскоростных роторов или валов, включает использование магнитного подшипника в комбинации с гидродинамическим подшипником. Гидродинамический подшипник используют в качестве подшипника, воспринимающего основную нагрузку. Магнитный подшипник используют в качестве средства управления неустойчивостью в гидродинамическом подшипнике. Достигается возможность управления неустойчивостью в гидродинамических подшипниках. 3 з.п. ф-лы, 62 ил.
Формула
Документы, цитированные в отчёте о поиске
Гидродинамический радиально-упорный подшипник скольжения
Комментарии