Система передачи электроэнергии под водой для обеспечения работы высокооборотного двигателя - RU2571117C2
Код документа: RU2571117C2
Чертежи







Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к подводному оборудованию, в частности, к подводному оборудованию для добычи нефти. Точнее, изобретение относится к системам, оборудованию и способам, применяемым для добычи нефти или приведения в действие соответствующего подводного оборудования. Изобретение более всего относится к оборудованию, требующему передачи переменного тока большой мощности под водой на большие расстояния посредством подводного кабеля, проходящего на эти расстояния; примерами такого оборудования являются электродвигатели для насосов и компрессоров, которые обычно нуждаются в регулировке скорости вращения путем регулировки электрической частоты.
Изобретение вплотную подходит к решению проблем, вызванных емкостным эффектом и скин-эффектом, тем самым обеспечивая возможность использования больших длин удаления, чем было возможно ранее.
Уровень техники
В последние десятилетия мировое потребление энергии росло экспоненциально, и предел растущему спросу на энергию пока не виден. До недавнего времени ископаемые виды топлива добывались преимущественно на сухопутных месторождениях; однако ограниченность запасов нефти побудила приложить серьезные усилия к поиску и разработке морских месторождений газа и нефти. Современным уровнем техники в области разработки морских месторождений является использование стационарных или плавучих обитаемых платформ и связывание подводного добывающего оборудования, присоединенного к подводной скважине, с этими платформами. В некоторых случаях добываемое сырье направляется непосредственно на находящееся на суше принимающее оборудование без прохождения через платформу. Для поддержания достаточно большого объема сырья, поступающего из месторождения на платформу или непосредственно на берег, могут повышать давление внутри продуктивного пласта с помощью насоса, или могут изолировать некоторый объем сырья с последующим его выкачиванием или повышением давления с целью «выдавливания». Кроме того, насосы до настоящего времени устанавливались на морское дно для прямого закачивания морской воды внутрь продуктивного пласта с целью поддержания давления для увеличенного объема добычи нефти.
Имеется несколько преимуществ подводного расположения насосов и компрессорных станций перед их расположением на платформах:
- безопасность для людей, поскольку нет необходимости в их работе и проживании на платформе, а также в их транспортировке вертолетами на платформу и с платформы;
- отсутствие риска возгорания и взрыва;
- отсутствие риска разрыва труб, используемых в процессе разработки месторождения, проходящих от морского дна к платформе и от платформы к морскому дну;
- защищенность от диверсий;
- снижение капитальных расходов и эксплуатационных расходов, т.е. снижение расходов на добычу нефти и газа;
- увеличенный объем добычи в результате того, что всасывающее действие компрессоров и насосов приложено ближе к устьям скважин;
- оборудование имеет стабильные, т.е. почти постоянные, условия окружающей среды: низкая и почти постоянная температура; малая скорость течения морской воды вокруг оборудования и отсутствие волн - в то время как температура на платформах может варьироваться, например, от -20°C до +30°C; а высокоскоростной ураганный ветер может сочетаться с чрезвычайно высокими волнами;
- холодная морская вода может использоваться для охлаждения электродвигателей и другого электрического и электронного оборудования, а также технологических текучих сред;
- предотвращение обезображивания пейзажа;
- значительно меньшая масса подводной установки и, следовательно, использование меньшего количества материалов и энергии для ее сооружения;
- меньшие выбросы диоксида углерода (газа, влияющего на климат) во время сооружения подводной установки ввиду указанного меньшего количества материалов;
- меньшие выбросы диоксида углерода во время работы ввиду отсутствия вертолетной транспортировки и отсутствия рабочих операций на платформе;
- меньшие выбросы диоксида углерода, чем при наличии платформы, благодаря тому, что для обеспечения работы компрессоров и насосов используются электродвигатели, а электроэнергия подается с берега или с платформы;
- меньшее потребление энергии и меньший выброс газа, влияющего на климат, на единицу массы нефти и газа.
Недостатком подводных компрессоров по состоянию на 2010 год является то, что ни один из них не был установлен и не эксплуатировался под водой, т.е. технология не была проверена на пригодность. Однако это лишь вопрос времени, и первая подводная компрессорная станция, возможно, будет приведена в действие в 2015 году или раньше, и стимулом для этого послужит настоящий документ.
Подводное повышение давления - это новая технология. Подводное повышение давления при большом расстоянии удаления оборудования, повышающего давление, от источника электроэнергии - это очень новая технология, использующая современное оборудование и имеющая проблемы, которые не решены или неактуальны в других технологиях.
Состояние уровня техники определено в документе WO 2009/015670, предлагающем использовать первый преобразователь напряжения на ближнем конце подводного передающего электроэнергию проходящего на некоторое расстояние кабеля, который (конец кабеля) находится на верхней поверхности платформы или на суше, и второй преобразователь напряжения на дальнем (т.е. подводном удаленном) конце этого кабеля. Также предлагается использовать частотный регулятор скорости вращения на любом конце этого кабеля. Подводные частотные регуляторы скорости вращения для электродвигателей также называются устройствами изменения электрической частоты, преобразователями электрической частоты, или просто преобразователями, и они представляют состояние технологий уровня техники. Ни в публикации WO 2009/015670, ни в других документах не упоминается емкостный эффект, а также не обсуждаются и не называются проблемы, связанные с частотными регуляторами скорости вращения.
В настоящее время в работе находится лишь небольшое количество подводных насосов и ни одного подводного компрессора. Подводные компрессорные станции, однако, разрабатываются, и ожидается, что первая будет установлена и введена в эксплуатацию в течение нескольких ближайших лет. В настоящее время все подводные насосы и компрессоры приводятся в действие асинхронными электродвигателями. Расстояние удаления установленного насоса от платформы или суши не превышает 30 км, если глубина не превышает 1800 м. Известно, что в области нефтяной промышленности проводятся серьезные исследования и разрабатываются серьезные проекты, целью которых является обеспечение установки компрессоров на расстоянии удаления из диапазона от 40 км до 150 км при глубине воды до 3000 м и более.
Реалистичная мощность электродвигателя составляет от приблизительно 200 кВт для малых насосов до 15 МВт для компрессоров, а в будущем возможно появление еще более крупных электродвигателей. Подводные электродвигатели, которые установлены в настоящее время, снабжаются электроэнергией через кабели, передающие электроэнергию переменного тока и проходящие от места, где расположен источник электроэнергии, т.е. от платформы или суши; в случае наличия нескольких электродвигателей каждый из них имеет собственный кабель и собственный преобразователь электрической частоты (частотный регулятор скорости вращения, иногда называемый устройством регулировки скорости вращения или устройством регулировки электрической частоты), который расположен на ближнем конце этого кабеля и управляет скоростью вращения относящегося к нему электродвигателя, расположенного на дальнем конце кабеля -см. фигуру 1 и Таблицу 2.
В контексте настоящего документа термин «ближний конец» означает конец линии электропередачи, находящийся вблизи источника электроэнергии. В области подводного оборудования это верхняя поверхность платформы или суша. Соответственно, термин «дальний конец» относится к другому концу линии электропередачи, находящемуся вблизи нагрузки, которая обычно представляет собой электродвигатель. Термин «дальний конец» не обязательно ограничен высоковольтным концом линии электропередачи, а может быть распространен на шины или разъемы более низкого напряжения, которые являются частью оборудования дальнего конца, например, на общую подводную шину на стороне низкого напряжения подводного трансформатора.
Компрессоры и насосы нередко работают на максимальных скоростях вращения 4000-14000 об/мин и 2000-5000 об/мин, соответственно. Таким образом, приводной электродвигатель должен иметь номинальную скорость вращения порядка 2000-14000 об/мин, если между ним и насосом либо компрессором не используется редуктор. Эта механическая скорость вращения соответствует диапазону электрической частоты приблизительно от 30 Гц до 230 Гц для двухполюсного электродвигателя. Электродвигатели с большим количеством пар полюсов имеют меньшую максимальную механическую скорость вращения при таких же электрических частотах.
Фигура 1 иллюстрирует единственное техническое решение, используемое в настоящее время для передачи электроэнергии к установленным под водой насосам; в некоторых случаях между частотным регулятором (3) скорости вращения и подводным электродвигателем (М) трансформатор (6) не используется; это техническое решение в настоящем документе называется первым техническим решением. Это техническое решение с одним подводным передающим электроэнергию проходящим на некоторое расстояние кабелем на каждый электродвигатель имеет недостаток, заключающийся в том, что оно становится дорогостоящим при больших расстояниях удаления, например, более 50 км, ввиду высокой стоимости кабеля.
Серьезным техническим препятствием для использования этого технического решения является то, что при определенных расстояниях удаления под водой передача электроэнергии от источника электроэнергии, находящегося на ближнем конце, к удаленному электродвигателю, находящемуся на дальнем конце, невыполнима, поскольку система электропередачи становится электрически нестабильной и не пригодной для эксплуатации из-за емкостного эффекта, который будет описан ниже. Настоящим изобретением решается эта проблема нестабильности.
Фигура 2 иллюстрирует техническое решение, которое было предложено для передачи электроэнергии к нескольким нагрузкам, расположенным на большом расстоянии удаления (второе техническое решение). Это техническое решение с одним общим подводным передающим электроэнергию проходящим на некоторое расстояние кабелем и подводной системой распределения электроэнергии, включающей по одному частотному регулятору (14) скорости вращения на каждый электродвигатель (М), значительно уменьшает расходы на кабель, а также устраняет проблему электрической нестабильности путем ограничения электрической частоты в этом кабеле, например, диапазоном 50-10 Гц; при этих частотах скин-эффект тоже является приемлемым. Частота затем повышается частотным регулятором (14) скорости вращения для обеспечения необходимой скорости вращения электродвигателя, присоединенного к этому регулятору. Однако второе техническое решение имеет и недостатки: высокая стоимость частотных регуляторов скорости вращения, которые, кроме того, не проверены на пригодность для подводного использования; поскольку такие частотные регуляторы скорости вращения состоят из большого количества электрических и электронных компонентов, включая управляющую систему, они увеличивают вероятность выхода из строя системы передачи и подводного распределения электроэнергии.
Далее будут описаны проблемы первого технического решения (фигура 1), в котором на дальнем конце подводного передающего электроэнергию проходящего на некоторое расстояние кабеля расположен один электродвигатель, и третьего технического решения (фигура 3), в котором на дальнем конце общего подводного передающего электроэнергию проходящего на некоторое расстояние кабеля расположены несколько электродвигателей, а на ближнем конце этого кабеля расположен общий частотный регулятор (3) скорости вращения.
При большом расстоянии удаления между нагрузкой и источником электроэнергии (порядка 50 км и более) влияние подводного передающего электроэнергию проходящего на некоторое расстояние кабеля настолько велико, что в настоящее время пока не создана система электропередачи для таких расстояний удаления при ограниченной нагрузке, такой как один электродвигатель. Индуктивность и сопротивление этого кабеля вызывают большое падение напряжения на участке между источником электроэнергии и нагрузкой. Известно, что такое падение напряжения является самоувеличивающимся и может приводить к нулевому напряжению на дальнем конце. Чем больше расстояние удаления, тем больше должно быть напряжение передачи, с тем чтобы уменьшить падение напряжения вдоль кабеля. Однако кабель обладает большой электрической емкостью, и в длинном кабеле, несущем переменный ток, возникает так называемый емкостный эффект. Емкостный эффект - это известное явление, заключающееся в том, что емкостный зарядный ток в линии или кабеле увеличивается при увеличении длины этой линии или этого кабеля и при увеличении напряжения. При расстоянии удаления 100 км емкостный зарядный ток в кабеле может быть больше, чем ток, на который рассчитана нагрузка, из-за чего такая неэффективная система электропередачи вряд ли может быть применена. Кроме того, более важным обстоятельством является то, что напряжение при отсутствии нагрузки приблизительно на 50% больше, чем напряжение источника электроэнергии, находящегося на ближнем конце; такое высокое напряжение разрушит кабель, а также трансформатор и соединения, находящиеся на дальнем конце. При быстром сбросе нагрузки напряжение на дальнем конце скачкообразно увеличивается на указанную величину. Кроме того, возникает максимальное переходное напряжение, составляющее, например, 50% напряжения источника электроэнергии, в результате чего суммарный скачок напряжения составляет порядка 100%, см. Таблицу 1, приведенную ниже, где значения, записанные толстым наклонным шрифтом, - это случаи, иллюстрирующие описанное выше увеличение напряжения.
Современные системы с расстояниями удаления порядка 30 км не имеют этой проблемы, поскольку в них возможно оптимальное сочетание расстояния удаления и электрической нагрузки.
Примечания, касающиеся емкостного эффекта и скин-эффекта
Емкостный эффект - это увеличение напряжения на дальнем конце длинной линии электропередачи относительно напряжения на ее ближнем конце, которое происходит, когда линия находится под напряжением, но нагрузка очень мала или отключена. Этот эффект обусловлен тем, что падение напряжения на индуктивности этой линии (обусловленное емкостным током) находится в фазе с напряжениями ближнего конца. Таким образом, и емкость, и индуктивность ответственны за это явление. Емкостный эффект наиболее сильно проявляется в более длинных линиях электропередачи и при более высоких приложенных напряжениях. Относительное повышение напряжения пропорционально квадрату длины линии электропередачи.
Ввиду большой емкости емкостный эффект гораздо сильнее проявляется в подземных и подводных кабелях, даже имеющих малые длины, чем в подвешенных в воздухе кабелях.
Уравнение для определения емкостного эффекта для некоторой системы имеет следующий вид:
Vf=Vn(1+ω×C×L×I2),
где
Vf - напряжение на дальнем конце,
Vn - напряжение на ближнем конце,
ω=2×3,14×f,
f - электрическая частота,
С - емкость линии,
L - индуктивность линии,
I - длина линии,
I2 - квадрат длины линии.
В различной литературе могут также быть найдены другие формулы для определения емкостного эффекта, но во всех случаях это явление усиливается с увеличением частоты передачи, емкости кабеля, длины кабеля и напряжения.
Из приведенной выше формулы можно сделать вывод, что емкостный эффект длинной линии электропередачи может быть скомпенсирован подходящим уменьшением электрической частоты. По этой причине во втором техническом решении имеется подводный частотный регулятор скорости вращения. Частота передачи может, например, быть равна 50 Гц (стандартная частота в Европе).
Еще одной выгодой низкой частоты передачи является значительное уменьшение скин-эффекта в подводном передающем электроэнергию проходящем на некоторое расстояние кабеле, т.е. лучшее использование площади поперечного сечения этого кабеля. На практике передача электроэнергии высокой частоты, например, 100 Гц и более, на большие расстояния, например, 100 км и более, невозможна из-за скин-эффекта и соответствующего большого сопротивления кабеля.
Влияние емкостного эффекта и скин-эффекта, разумеется, необходимо рассчитывать индивидуально в каждом случае, чтобы определять, являются ли они приемлемыми для передачи электроэнергии на данной частоте.
Имеется необходимость в создании подводных систем электропередачи, которые являются более совершенными с точки зрения описанных выше проблем.
Раскрытие изобретения
Изобретением предлагается подводная система повышения давления для работы под водой на расстояниях удаления более 40 км под управлением с сухого места на верхней поверхности надводного объекта или на суше. Эта система характеризуется тем, что содержит по меньшей мере один подводный передающий электроэнергию протяженный кабель, проходящий от ближнего конца, расположенного в сухом месте на суше или на верхней поверхности надводного объекта, к дальнему концу, расположенному возле одной или более подводной нагрузки, такой как подводные насосы, подводные компрессоры или другие нагрузки, причем к ближнему концу присоединен по меньшей мере один источник электроэнергии, а указанный кабель имеет размеры для работы на частоте, отличной от рабочей частоты присоединенных подводных нагрузок, с тем чтобы контролировать емкостный эффект и электрические потери; и по меньшей мере один пассивный преобразователь электрической частоты, функционально включенный между дальним концом указанного кабеля и указанными подводными нагрузками, причем этот преобразователь расположен в емкости высокого давления и преобразует рабочую частоту указанного кабеля в частоту, подходящую для приведения в действие присоединенных подводных нагрузок.
Ни в одной более ранней подводной повышающей давление системе не принимался во внимание емкостный эффект. Более ранняя версия системы с подводным частотным регулятором скорости вращения может, следовательно, быть не пригодной для многих областей применения, поскольку изоляция проходящего на некоторое расстояние кабеля может быть повреждена высоким напряжением на дальнем конце, которое не поддается управлению и обусловлено емкостным эффектом.
Признак «пассивный преобразователь электрической частоты» означает, что этот преобразователь не должен и не может настраиваться на месте во время работы или в любое время в течение срока службы системы; этот преобразователь представляет собой пассивный рабочий узел, а именно пассивное повышающее частоту устройство или пассивное понижающее частоту устройство, в отличие от подводного частотного регулятора скорости вращения. Подводный частотный регулятор скорости вращения является очень сложным, крупным и дорогостоящим: он обычно имеет высоту 12 метров, диаметр 3 метра и массу приблизительно 200 тонн. Пассивный преобразователь электрической частоты, наоборот, гораздо меньше и проще: он обычно имеет длину приблизительно 6 метров, диаметр 2-3 метра и массу приблизительно 50 тонн. Надежность пассивного преобразователя электрической частоты оценивается в несколько раз выше, чем надежность подводного частотного регулятора скорости вращения. Это обусловлено тем, что подводный частотный регулятор скорости вращения очень сложен, и даже несмотря на то, что все его компоненты являются высококачественными, большое количество этих компонентов и их сложность снижают практическую надежность. Стоимость предлагаемой системы значительно ниже по сравнению со стоимостью систем уровня техники, имеющих подводные частотные регуляторы скорости вращения. Термин «другие нагрузки» включает в себя управляющие системы и другие нагрузки, не обязательно относящиеся к повышению давления.
Входная и выходная электрические частоты пассивного преобразователя электрической частоты являются разными. Их соотношение является постоянным, поскольку этот преобразователь является пассивным. Входная электрическая частота (т.е. рабочая частота подводного передающего электроэнергию проходящего на некоторое расстояние кабеля) находится в диапазоне 0-150 Гц, например, 2-60 Гц, 4-50 Гц или 5-40 Гц, в то время как выходная электрическая частота находится в диапазоне 0-350 Гц, например, 30-300 Гц, 50-250 Гц или 50-200 Гц. Подводный пассивный преобразователь электрической частоты может быть расположен в одном корпусе или нескольких корпусах (т.е. он может состоять из одного элемента или нескольких элементов); в любом случае, все его части должны выдерживать жесткие подводные условия и не выходить из строя. Используемые в настоящем изобретении подводный пассивный преобразователь электрической частоты и соответствующие системы превосходят по таким параметрам, как срок службы, стоимость и надежность, например, подводные твердотельные частотные регуляторы скорости вращения.
Рабочая частота подводного проходящего на некоторое расстояние передающего электроэнергию кабеля должна выбираться с учетом емкостного эффекта и электрических потерь. Изоляция является важным компонентом. Наиболее предпочтительны такие размеры проводников и изоляции и выбор рабочей частоты, что на дальнем конце этого кабеля емкостный эффект увеличивает напряжение ровно на величину падения напряжения (т.е. электрических потерь), в результате чего избыточное напряжение на дальнем конце предотвращено, а конструкция кабеля упрощена. Инструкции, представленные в настоящем документе, в сочетании с хорошей инженерно-технической практикой достаточны для надлежащей разработки этого кабеля, включая выбор рабочей частоты. Техническое решение должно выбираться индивидуально в каждом случае. Далее разрабатывается пассивный преобразователь электрической частоты для преобразования рабочей частоты подводного проходящего на некоторое расстояние передающего электроэнергию кабеля в рабочую частоту подводных нагрузок, т.е. подводных компрессоров или насосов, или, говоря еще точнее, электродвигателей подводных компрессоров или насосов.
Изобретением также предлагается пассивный преобразователь электрической частоты для функционального включения между дальним концом подводного передающего электроэнергию протяженного кабеля и подводными нагрузками для повышения давления, характеризующийся тем, что он расположен в емкости высокого давления и преобразует частоту указанного кабеля в частоту, подходящую для приведения в действие указанных подводных нагрузок. Пассивный преобразователь электрической частоты повышает частоту электрического тока (например, коэффициент 1,1-5,0) или понижает частоту электрического тока (например, коэффициент 0-0,9). Предпочтительно, пассивный преобразователь электрической частоты содержит электродвигатель и электрогенератор, имеющие общий вал, причем количество полюсов электрогенератора равно умноженному в некоторое количество раз количеству полюсов электродвигателя; и заключен в один корпус высокого давления, в котором имеется один компенсатор давления и по одному каналу для каждой фазы трехфазной входной линии и трехфазной выходной линии.
Альтернативно (в частности, для относительно малой мощности), может быть использован один общий канал для всех трех фаз входной линии и один общий канал для всех трех фаз выходной линии, или, более предпочтительно, один общий канал для фаз входного и выходного каналов. Альтернативно, пассивный преобразователь электрической частоты содержит одно из следующего: механическая передача, гидрогазодинамическая или гидравлическая передача, механогидрогазодинамическая передача, магнитная передача, статическое (твердотельное) повышающее частоту устройство или выпрямитель тока.
Изобретением также предлагается альтернативная подводная система повышения давления для работы под водой на расстояниях удаления более 40 км, характеризующаяся тем, что она содержит по меньшей мере один подводный передающий электроэнергию протяженный кабель, проходящий от ближнего конца, расположенного в сухом месте на суше или на верхней поверхности надводного объекта, к дальнему концу, расположенному возле одной или более подводной нагрузки, такой как подводные насосы, подводные компрессоры или другие нагрузки, причем к ближнему концу присоединен по меньшей мере один источник электроэнергии для подачи электроэнергии постоянной частоты, а указанный кабель имеет размеры для работы на этой частоте или на более низкой частоте, при работе на которой к ближнему концу кабеля подключено пассивное понижающее частоту устройство, с тем чтобы контролировать емкостный эффект и электрические потери; и по меньшей мере один активный преобразователь электрической частоты, функционально включенный между дальним концом указанного кабеля и указанными подводными нагрузками, причем этот преобразователь расположен в емкости высокого давления и преобразует рабочую частоту указанного кабеля в частоту, подходящую для приведения в действие присоединенных подводных нагрузок.
Эта альтернативная система предназначена для присоединения к источнику электроэнергии постоянной частоты, такому как источник электроэнергии с частотой 50 Гц, и в этом случае регулировки происходят на дальнем конце этого подводного передающего электроэнергию проходящего на некоторое расстояние кабеля, но, предпочтительно, управление этими регулировками осуществляется с поста управления, расположенного на верхней поверхности платформы или на суше, поэтому использован термин «активный преобразователь электрической частоты». Это является отличием от уровня техники, в котором предусматривается наличие устройств активного управления обоих концах указанного кабеля. Если указанная постоянная частота слишком высока для данного расстояния удаления, для размеров и типа проводников кабеля и для размеров и типа изоляции кабеля, то к ближнему концу этого кабеля присоединяется понижающее частоту устройство для понижения имеющейся частоты до рабочей частоты этого кабеля. Активный преобразователь электрической частоты предлагаемой альтернативной системы содержит по меньшей мере одно из следующих устройств: управляемая механическая передача, регулируемая гидрогазодинамическая или гидравлическая передача, регулируемая механогидрогазодинамическая передача, регулируемая магнитная передача, один общий подводный частотный регулятор скорости вращения для нескольких подводных нагрузок - причем это устройство функционально присоединено между дальним концом указанного подводного передающего электроэнергию проходящего на указанное расстояние удаления кабеля и подводными нагрузками для управления скоростью присоединенных нагрузок путем регулировки передаточного отношения.
Изобретением также предлагается способ управления работой подводной системы повышения давления согласно изобретению, характеризующийся тем, что в нем регулируют скорость присоединенных нагрузок только посредством регулировки рабочих параметров оборудования, присоединенного к ближнему концу, расположенному на верхней поверхности надводного объекта или на суше, подводного передающего электроэнергию протяженного кабеля. Все подводное оборудование представляет собой пассивные рабочие узлы, регулировки требуются и возможны лишь на сухой верхней поверхности платформы или на суше у ближнего конца указанного кабеля, в отличие от систем уровня техники.
В альтернативном способе согласно изобретению, который применяется с описанной выше альтернативной системой согласно изобретению, единственная активная регулировка выполняется на дальнем конце протяженного кабеля.
Изобретением также предлагается способ подводного повышения давления с использованием подводной системы согласно изобретению, для повышения давления путем приведения в действие подводных насосов и компрессоров на расстояниях удаления более 40 км и под управлением с сухого места на верхней поверхности надводного объекта или на суше, в котором обеспечивают по меньшей мере один передающий электроэнергию подводный протяженный кабель, проходящий от ближнего конца, расположенного в сухом месте на суше или на верхней поверхности надводного объекта, к дальнему концу, расположенному возле одной или более подводной нагрузки, такой как насосы или компрессоры, причем к ближнему концу присоединяют по меньшей мере один источник электроэнергии, а размер указанного кабеля выбирают из условия работы кабеля на частоте, отличной от рабочей частоты присоединенных подводных нагрузок, с тем чтобы контролировать емкостный эффект и электрические потери; преобразуют частоту указанного кабеля в по меньшей мере одном пассивном преобразователе электрической частоты, функционально включенном между дальним концом кабеля и подводными нагрузками, в частоту, подходящую для приведения в действие присоединенных нагрузок; и приводят в действие систему.
Кроме того, изобретением предлагается применение подводной системы согласно изобретению для приведения в действие подводных повышающих давление насосов или компрессоров на дальнем конце подводного передающего электроэнергию протяженного кабеля, проходящего на расстояние удаления, которое может превышать 40 км, причем повышение давления не требует подводных средств управления.
Наконец, изобретением предлагается применение пассивного преобразователя электрической частоты согласно изобретению, предназначенного для функционального включения между дальним концом подводного передающего электроэнергию протяженного кабеля и подводными нагрузками, для повышения давления.
Вариант осуществления изобретения с повышением частоты для обеспечения работы электродвигателей переменного тока
Вариант осуществления изобретения (четвертое техническое решение) показан на фигурах 4 и 5. Главным признаком этого варианта осуществления является наличие подводного устройства, повышающего частоту, расположенного под водой на дальнем конце подводного передающего электроэнергию проходящего на некоторое расстояние удаления кабеля и на малом расстоянии от электродвигателей, которые обеспечивают работу компрессоров и насосов. Под малым расстоянием в данном контексте подразумевается расстояние, достаточно малое для поддержания приемлемого активного сопротивления и, следовательно, приемлемых электрических потерь между электрогенератором (G) и электродвигателями; кроме того, под малым расстоянием в данном контексте подразумевается расстояние, достаточно малое для предотвращения проблем, вызванных емкостным эффектом и нестабильностью. Важно отметить, что эти подводные устройства, повышающие частоту, не осуществляют непосредственное управление частотой для регулировки рабочей скорости вращения электродвигателей, поскольку не содержат местную управляющую систему, которая регулирует скорость вращения в соответствии с потребностями. Изменение скорости вращения в соответствии с потребностями установившегося режима добычи, запуск и остановка, увеличение и уменьшение скорости вращения выполняются с помощью частотного регулятора (3) скорости вращения, который расположен на поверхности у ближнего конца указанного кабеля (на верхней поверхности платформы или на суше) на большом расстоянии от этих подводных устройств, повышающих частоту. Подводные устройства, повышающие частоту, представляют собой лишь пассивные рабочие узлы, задачей которых является лишь повышение с некоторым постоянным коэффициентом частоты передачи, определяемой частотным регулятором скорости вращения.
Повышение частоты легче всего получить путем использования подводного электродвигателя, вал которого присоединен к подводному электрогенератору, причем обе эти машины работают с одинаковой скоростью вращения, т.е. путем использования подводного ротационного устройства, повышающего частоту. Может быть использован любой тип соединения (упругая муфта, жесткая муфта, общий вал электродвигателя и электрогенератора, гидравлическая муфта, гидрогазодинамическая муфта), который обеспечивает одинаковую скорость вращения электродвигателя и электрогенератора. Электродвигатель, предпочтительно, имеет два полюса для поддержания как можно меньшей частоты передачи, в то время как количество полюсов электрогенератора выбрано в соответствии с необходимым повышением указанной частоты передачи; частота передачи должна быть достаточно мала для того, чтобы не возникали описанные выше проблемы, вызванные емкостным эффектом, нестабильностью и высоким сопротивлением, которое обусловлено скин-эффектом и вызывает неприемлемое падение напряжения; иными словами, частота передачи должна находиться в диапазоне, внутри которого не возникают проблемы.
Если электродвигатель подводного ротационного устройства, повышающего частоту, имеет 2 полюса, то 4 полюса в электрогенераторе обеспечивают коэффициент повышения частоты 2:1; 6 полюсов в электрогенераторе обеспечивают коэффициент повышения частоты 3:1; 8 полюсов в электрогенераторе обеспечивают коэффициент повышения частоты 4:1 и т.д. Это означает, что при использовании подводного ротационного устройства, повышающего частоту, с 2-полюсным электродвигателем и 4-полюсным электрогенератором, если частотный регулятор скорости вращения обеспечивает частоту 50 Гц, то повышенная частота составляет 100 Гц, что соответствует скорости вращения 2-полюсного электродвигателя (М1-М4) 6000 об/мин. При использовании подводного ротационного устройства с 2-полюсным электродвигателем и 8-полюсным электрогенератором повышенная частота составляет 200 Гц, а скорость вращения 2-полюсного электродвигателя (М1-М4) составляет 12000 об/мин. Эти примеры наглядно демонстрируют, что предлагаемое изобретение может, используя частоту передачи, не вызывающую проблем, обеспечивать любую необходимую электрическую частоту для практических скоростей вращения электродвигателей путем правильного сочетания количества полюсов электродвигателя и электрогенератора в подводном ротационном устройстве, повышающем частоту электрического тока.
В целом, коэффициент повышения частоты может быть выражен следующим образом:
fs-u=n×ft, где
ft - частота передачи, Гц,
fs-u - повышенная частота, равная входной частоте электродвигателей (М1-М4), Гц,
n - коэффициент повышения частоты (2, 3, 4 и т.д.), зависящий от соотношения между количеством полюсов электродвигателя и количеством полюсов электрогенератора.
Частотный диапазон, внутри которого не возникают проблемы, должен вычисляться индивидуально для каждого случая. Для расстояний удаления, например, до 150 км частота передачи, например, до 75 Гц может находиться в диапазоне, внутри которого не возникают проблемы, что обеспечивает скорость вращения двухполюсного электродвигателя (М1-М4) компрессора 2×75×60=9000 об/мин, если коэффициент повышения частоты составляет 2:1 (2-полюсный электродвигатель и 4-полюсный электрогенератор). Если оказалось, что частота передачи, равная 75 Гц, слишком велика и не входит в диапазон, внутри которого не возникают проблемы, то может быть применен коэффициент повышения частоты 3:1 (2-полюсный электродвигатель и 6-полюсный электрогенератор), что в данном примере позволяет использовать меньшую частоту передачи, равную 50 Гц. Частота передачи не остается постоянной в течение всего периода разработки нефтяного или газового месторождения, а регулируется с течением времени по мере того, как давление у устьев скважин уменьшается. Для данного случая (коэффициент повышения частоты 3:1) частота передачи на ближнем конце подводного передающего электроэнергию проходящего на некоторое расстояние кабеля может составлять 33,3 Гц в начале разработки и 50 Гц в конце разработки, что соответствует изменению скорости вращения 2-полюсного электродвигателя (М1-М4) компрессора, находящегося на дальнем конце этого кабеля, от 6000 об/мин до 9000 об/мин.
Благодаря выбору подходящего коэффициента повышения частоты путем подбора подходящего количества полюсов электродвигателя и электрогенератора может быть возможным без проблем передавать электроэнергию переменного тока подводным электродвигателям (М1-М4), находящимся у дальнего конца подводного передающего электроэнергию проходящего на некоторое расстояние кабеля на расстоянии 300 км или более от ближнего конца этого кабеля.
Использование 2-полюсного электродвигателя в подводном устройстве, повышающем частоту, является предпочтительным для поддержания как можно меньшей частоты передачи. Если по тем или иным причинам, например, связанным с крутящим моментом и мощностью, оказалось выгоднее использовать электродвигатель с большим количеством полюсов, то по-прежнему возможно обеспечить желаемый коэффициент повышения частоты путем соответствующего подбора количества полюсов электрогенератора; например, 4-полюсный электродвигатель и 12-полюсный электрогенератор обеспечивают коэффициент повышения частоты 3:1.
Преимуществом использования малой частоты передачи и 4-полюсного электродвигателя является то, что скорость вращения электродвигателя и электрогенератора является малой, благодаря чему малыми являются и соответствующие потери на трение в электродвигателе. Это дает возможность использования маслонаполненных электродвигателя и электрогенератора, расположенных в общем корпусе высокого давления.
Например, если частота передачи составляет 25 Гц и используется 4-полюсный электродвигатель, то скорость его вращения составляет лишь 750 об/мин, что обеспечивает малые потери на трение. Для получения частоты 150 Гц на выходе электрогенератора последний должен иметь 24 полюса. При таком исполнении устройства, повышающего частоту, при изменении частоты передачи от 18 Гц до 28 Гц скорость вращения 2-полюсного электродвигателя (М1-М4) компрессора изменяется от 6480 об/мин до 10080 об/мин.
Выбор диапазона изменения частоты передачи и соответствующего коэффициента повышения частоты, таким образом, должен обеспечивать выполнение следующих условий: частота передачи должна быть достаточно мала для обеспечения стабильной передачи на заданное расстояние удаления и для удержания емкостного эффекта и скин-эффекта малыми; количество полюсов и величины крутящих моментов электродвигателя и электрогенератора должны быть приемлемыми. Кроме того, если предпочтительны маслонаполненные электродвигатель и электрогенератор, скорость их вращения должна удерживаться ниже некоторого предела во избежание слишком больших потерь на трение; обычно выгодной является скорость вращения от 750 об/мин до 1500 об/мин; при частоте передачи 25 Гц для получения скорости вращения 750 об/мин следует использовать 4-полюсный электродвигатель, а для получения скорости вращения 1500 об/мин следует использовать 2-полюсный электродвигатель.
Ниже приведена таблица, которая показывает получаемую скорость вращения 2-полюсного привода (электродвигателя (М1-М4)) подводного компрессора при использовании подводного ротационного устройства, повышающего частоту, имеющего 4-полюсный электродвигатель и 12-полюсный электрогенератор.
Эта таблица демонстрирует, что частота передачи до 50 Гц покрывает наиболее используемый диапазон скоростей вращения приводов компрессоров.
Ниже приведена подобная таблица для 2-полюсного привода (электродвигателя (М1-М4)) компрессора и подводного ротационного устройства, повышающего частоту, имеющего 6-полюсный электродвигатель и 24-полюсный электрогенератор.
В этом случае для покрытия наиболее используемого диапазона скоростей вращения приводов компрессоров достаточно частоты передачи до 40 Гц.
Приведенные выше таблицы наглядно демонстрируют, что частота передачи может удерживаться малой для предотвращения проблем, вызванных емкостным эффектом и скин-эффектом.
Выбор компрессора - это тоже фактор, который помогает в достижении свободы выбора частоты передачи и коэффициента повышения частоты. Иными словами, компрессор может быть выбран (в разумных пределах) так, чтобы подходить к повышенной частоте fs-u оптимальной системы электропередачи.
Подводное ротационное устройство, повышающее частоту, по своему принципу является очень простым и не требующим управляющей системы, поскольку повышенная частота получается автоматически как результат соотношения между количеством полюсов электрогенератора и количеством полюсов электродвигателя этого подводного ротационного устройства, повышающего частоту.
Еще одним преимуществом подводного ротационного устройства, повышающего частоту, является то, что выходные ток и напряжение имеют практически идеальную форму синусоиды, что благоприятно для электродвигателей (М1-М4), т.е. электрический фильтр для сглаживания синусоид не требуется.
Подводное ротационное устройство, повышающее частоту, кроме того, обеспечивает индуктивность для системы электропередачи, в которой подводный передающий электроэнергию проходящий на некоторое расстояние кабель имеет избыточную емкость, благодаря чему подводное ротационное устройство, повышающее частоту, уменьшает необходимость в компенсации электрической фазы на ближнем конце.
Имеются небольшие электрические потери в подводном ротационном устройстве, повышающем частоту, составляющие, например, 5%; потери также имеются и в частотном регуляторе скорости вращения, однако, возможно, меньшие.
Выбор подводного ротационного устройства, повышающего частоту, должен, разумеется, быть таким, чтобы выходная мощность электрогенератора при данной частоте соответствовала потребностям присоединенного электродвигателя (присоединенных электродвигателей) (М1-М4). Например, если 2-полюсный электродвигатель компрессора должен давать мощность 10 МВт при 10000 об/мин, то выходная мощность электрогенератора должна быть равна сумме указанных 10 МВт и некоторой дополнительной малой мощности для покрытия потерь, а выходная частота электрогенератора должна составлять 167 Гц. Электродвигатель подводного ротационного устройства, повышающего частоту, должен, соответственно, выдавать на выходном валу мощность, равную сумме указанных 10 МВт и некоторой дополнительной малой мощности для покрытия потерь.
Еще одним способом повышения частоты, отличным от использования разного количества полюсов в электродвигателе и электрогенераторе, является введение между ними повышающего редуктора с постоянным передаточным отношением, например, 3:1. При таком передаточном отношении, если частота передачи электроэнергии составляет, например, 50 Гц, 4-полюсный электродвигатель имеет скорость вращения 1500 об/мин, а скорость вращения электрогенератора составляет 4500 об/мин; если электрогенератор имеет 4 полюса, то электрическая частота на его выходе составляет 150 Гц, в результате чего скорость вращения 2-полюсного привода компрессора составляет 9000 об/мин. Эти два способа (использование повышающего редуктора и разного количества полюсов электродвигателя и электрогенератора) могут быть использованы одновременно для уменьшения количества полюсов, если это является выгодным. Например, если редуктор с передаточным отношением 2:1 введен между 4-полюсным электродвигателем и 8-полюсным электрогенератором, то скорость вращения электродвигателя при частоте передачи 50 Гц составляет 1500 об/мин, скорость вращения электрогенератора составляет 3000 об/мин, а электрическая частота на выходе электрогенератора составляет 200 Гц, в результате чего скорость вращения 2-полюсного привода компрессора составляет 12000 об/мин. С помощью частотного регулятора скорости вращения, расположенного на ближнем конце подводного передающего электроэнергию проходящего на некоторое расстояние кабеля, скорость вращения привода может регулироваться до подходящих величин путем регулировки частоты передачи электроэнергии от 0 до 50 Гц.
В некоторых случаях может поддерживаться постоянная частота передачи и, следовательно, постоянная частота на выходе электрогенератора и, следовательно, постоянная скорость вращения присоединенного электродвигателя, например, электродвигателя компрессора или насоса. Если электродвигатель приводит в действие компрессор, то скорость вращения компрессора может поддерживаться постоянной, например, 9000 об/мин; производительность и степень повышения давления компрессора, требования к которым изменяются с течением времени, могут регулироваться путем совместного использования нескольких компрессоров и повторного прогона сжатых газов через компрессор. Это уменьшает капитальные расходы на всю систему, но немного увеличивает электрические потери из-за повторного прогона сжатых газов через компрессор. Может требоваться более частое совместное использование нескольких компрессоров по сравнению со случаем использования изменяемой частоты передачи. Оптимальные способ передачи электроэнергии и компрессорная система должны подбираться индивидуально в каждом случае на основании расчетов для получения оптимальной системы.
Конструкция подводного ротационного устройства, повышающего частоту
Маслонаполненный корпус высокого давления
Первый вариант осуществления
Электродвигатель и электрогенератор собраны в общем корпусе высокого давления с подходящим количеством фланцев с уплотнениями. Кроме того, имеется несколько дополнительных параметров этого технического решения, которые перечислены ниже.
Система из электродвигателя и электрогенератора имеет подходящее количество подшипников.
Скорость вращения системы из электродвигателя и электрогенератора достаточно мала для поддержания приемлемых потерь на трение, а общий корпус высокого давления наполнен подходящей жидкостью, например, маслом, которое смазывает подшипники, а также охлаждает электродвигатель и электрогенератор, и свойства выбранного масла, предпочтительно, таковы, что оно служит электрическим изолятором.
Вместо масла корпус высокого давления может быть наполнен водой или смесью воды и антифриза, например, моноэтиленгликоля, что требует полной электроизоляции обмоток электродвигателя и электрогенератора.
Желаемое давление внутри корпуса высокого давления может быть легко получено путем неполного наполнения этого корпуса жидкостью и оставления в нем некоторого объема газа, имеющего желаемое давление.
Выгодным решением является наполнение корпуса высокого давления жидкостью и использование устройства для выравнивания давления между окружающей морской водой и этой жидкостью, находящейся внутри этого корпуса. Это обеспечивает минимальную толщину стенок корпуса высокого давления, а также уменьшает нагрузку на фланцы и уплотнения и требования к фланцам и уплотнениям.
Если прямое охлаждение системы из электродвигателя и электрогенератора путем отдачи тепла через корпус высокого давления в окружающую морскую воду является недостаточным, должен быть введен наружный охлаждающий контур, обменивающийся теплом с окружающей морской водой.
Насос для охлаждающего контура может быть присоединен к валу системы из электродвигателя и электрогенератора (предпочтительное техническое решение), или он может представлять собой отдельный насос с собственным электродвигателем.
Если имеется возможность использования магнитных подшипников, они могут быть альтернативой подшипникам с жидкостной смазкой. Более подробно этот вопрос раскрыт ниже в описании газонаполненного корпуса.
Газонаполненный корпус высокого давления
Корпус высокого давления может быть наполнен инертным газом, например, осушенным азотом или осушенным воздухом. Преимуществом этого являются меньшие потери на трение, чем в маслонаполненном корпусе высокого давления, что позволяет использовать более высокие скорости вращения системы из электродвигателя и электрогенератора.
Кроме того, имеется несколько дополнительных параметров этого технического решения, которые перечислены ниже.
Подшипники с жидкостной смазкой (например, в качестве смазки могут использоваться масло, вода или смесь воды и моноэтиленгликоля), циркулирующей по некоторому контуру, проходящему через наружный теплообменник либо лишь внутри корпуса высокого давления.
По меньшей мере один насос для смазки, приводимый в действие либо валом системы из электродвигателя и электрогенератора, либо отдельным электродвигателем.
Если необходимо, имеется охлаждающий контур для газа, содержащий по меньшей мере один вентилятор для обеспечения циркуляции газа внутри корпуса высокого давления или, если необходимо, через наружный теплообменник.
Вместо подшипников с жидкостной смазкой могут быть использованы магнитные подшипники. Охлаждающая система для газа в этом случае должна иметь такие размеры, чтобы также охлаждать магнитные подшипники.
Должна иметься управляющая система для магнитных подшипников, расположенная вблизи корпуса высокого давления системы из электродвигателя и электрогенератора, или внутри этого корпуса, или на поверхности платформы, или на суше. Если управляющая система расположена в некоторой емкости снаружи корпуса высокого давления системы из электродвигателя и электрогенератора, то необходимы каналы, проходящие сквозь стенку этого корпуса высокого давления, а также провода для передачи электроэнергии и сигналов между этой управляющей системой и магнитными подшипниками. Если управляющая система расположена в емкости снаружи корпуса высокого давления системы из электродвигателя и электрогенератора, то эта емкость может быть выполнена с возможностью отделения или без возможности отделения.
Давление внутри корпуса высокого давления может быть выбрано из диапазона от 1 бар до давления окружающей морской воды или выше. Преимуществом низкого давления является малое трение и малые потери. Преимуществом высокого давления является то, что теплоемкость газа увеличивается с ростом давления, что благоприятно с точки зрения охлаждения. Еще одним преимуществом высокого давления является меньшая необходимая толщина стенки корпуса высокого давления и меньшая нагрузка на фланцы и уплотнения. Если выбранное давление близко к давлению окружающей морской воды или равно давлению окружающей морской воды, требования к корпусу высокого давления, фланцам и уплотнениям являются такими же, что и в случае с наполненным жидкостью корпусом высокого давления, давление внутри которого уравновешено с давлением окружающей морской воды.
Подводное ротационное устройство, повышающее частоту
Выше упоминалось использование гидравлической или гидрогазодинамической муфты между электродвигателем и электрогенератором. Такая муфта имеет преимущество, заключающееся в плавном пуске, т.е. напряжение, подаваемое электрогенератором в электродвигатель (М1-М4) нарастает не скачкообразно, а в течение некоторого времени, благодаря чему при запуске предотвращено скачкообразное повышение тока. Такая муфта может быть регулируемой так, что скорость вращения электрогенератора можно регулировать относительно постоянной скорости вращения электродвигателя. В этом случае система из электродвигателя и электрогенератора может использоваться в качестве подводного частотного регулятора скорости вращения, или, говоря точнее, подводного ротационного частотного регулятора скорости вращения, и частотные регуляторы скорости вращения, расположенные на верхней поверхности платформы или на суше, в этом случае могут не использоваться.
Вместо гидрогазодинамической муфты может быть использована механическая передача для увеличения и уменьшения скорости вращения электрогенератора и, следовательно, его выходной частоты.
Если используется регулируемая муфта того или иного типа (гидрогазодинамическая или механическая), то управляющая система для этой регулируемой муфты может быть расположена в отдельной емкости снаружи подводного ротационного частотного регулятора скорости вращения или, что является предпочтительным, она может быть расположена на поверхности и, предпочтительно, присоединена (или интегрирована) к центральной управляющей системе подводной повышающей давление системы, компрессорной станции или подводной обрабатывающей установки либо другой системы с подводными электродвигателями с изменяемой скоростью вращения.
Важно отметить, что если применен подводный ротационный регулятор скорости вращения, то применение расположенного на поверхности частотного регулятора скорости вращения становится излишним, и система, содержащая и то, и другое, не является техническим решением настоящего изобретения.
Подводное статическое устройство, повышающее частоту
Вместо подводного ротационного устройства, повышающего частоту, может быть использовано подводное статическое устройство, повышающее частоту, при условии, что оно имеет простую конструкцию и при этом достаточно высокие прочность, надежность и приспособленность к техническому обслуживанию и ремонту. Одним очевидным упрощением является то, что управляющая система для задания коэффициента повышения частоты может быть расположена на поверхности и присоединена (или интегрирована) к управляющей системе расположенного на поверхности частотного регулятора скорости вращения, который управляет скоростью вращения электродвигателей. Единственной функцией подводного статического устройства, повышающего частоту, является повышение частоты передачи с некоторым коэффициентом повышения n:1. Нет необходимости в очень быстрой реакции подводного статического устройства, повышающего частоту, что позволяет располагать его управляющую систему на ближнем конце подводного передающего электроэнергию проходящего на некоторое расстояние кабеля.
Расположенную на поверхности управляющую систему, очевидно, гораздо легче обслуживать и ремонтировать, чем расположенную под водой управляющую систему, что значительно повышает приспособленность к техническому обслуживанию и ремонту подводного статического устройства, повышающего частоту.
Одним очевидным преимуществом подводного статического устройства, повышающего частоту, по сравнению с подводным ротационным устройством, повышающим частоту, является то, что коэффициент повышения частоты может быть изменен в любой момент, если это является выгодным, например, изменен с 2:1 на 3:1.
Входным сигналом для управляющей системы подводного статического устройства, повышающего частоту, является частота передачи, а выходным сигналом является сигнал, который повышает частоту на выходе подводного статического устройства, повышающего частоту, с заданным коэффициентом повышения, соответствующим требуемой скорости электродвигателя (электродвигателей).
В этом случае тоже справедлива формула
fs-u=n×ft, где
n - коэффициент повышения частоты, который не обязательно является целым числом, а может иметь любое желаемое значение, например, 2,3, в отличие от ротационного устройства, повышающего частоту, где отношение количества полюсов электрогенератора к количеству полюсов электродвигателя (т.е. коэффициент n) является целым числом.
Альтернативно, подводное статическое устройство, повышающее частоту, может быть запрограммировано для повышения частоты на определенную величину приращения, например, для добавления 100 Гц к частоте передачи, равной, например, 50 Гц; это правило может быть выражено следующей формулой:
fs-u=ft+Δfa, где
ft - частота передачи, Гц,
fs-u - повышенная частота электроэнергии, равная входной частоте электродвигателей, Гц,
fa - величина приращения, Гц.
Кроме того, имеется несколько дополнительных параметров подводного статического устройства, повышающего частоту, которые перечислены ниже.
Компоненты подводного статического устройства, повышающего частоту, могут быть собраны в корпусе высокого давления, наполненном подходящей жидкостью, например, изоляционным маслом, которое, кроме того, охлаждает электронные и электрические компоненты.
Давление указанной жидкости, находящейся внутри корпуса высокого давления, может быть уравновешено с давлением окружающей морской воды или может поддерживаться на уровне между 1 бар и давлением окружающей морской воды; давление выбирается на основании устойчивости компонентов к давлению.
Управляющая система может быть расположена внутри корпуса высокого давления, но более выгодным является ее расположение внутри наружной емкости (более подробное описание которой имеется в приведенном выше разделе «Газонаполненный корпус высокого давления»).
Управляющая система может быть расположена на поверхности (на верхней поверхности платформы или на суше).
Альтернативно наполненному жидкостью корпусу высокого давления может быть использован корпус высокого давления, наполненный инертным осушенным газом, например, осушенным азотом. Давление внутри корпуса высокого давления может быть выбрано из диапазона от 1 бар до давления окружающей морской воды или выше. Преимуществом высокого давления является то, что теплоемкость газа увеличивается с ростом давления, что благоприятно с точки зрения охлаждения. Еще одним преимуществом высокого давления является меньшая необходимая толщина стенки корпуса высокого давления и меньшая нагрузка на фланцы и уплотнения. Если выбранное давление близко к давлению окружающей морской воды или равно давлению окружающей морской воды, требования к корпусу высокого давления, фланцам и уплотнениям являются такими же, что и в случае с наполненным жидкостью корпусом высокого давления, давление внутри которого уравновешено с давлением окружающей морской воды. Давление выбирается на основании устойчивости к давлению компонентов (электронных, электрических и других), находящихся внутри корпуса высокого давления.
Если это является выгодным, компоненты подводного статического устройства, повышающего частоту, могут быть разделены оптимальным образом по их устойчивости к различным средам: к жидкости, к жидкости высокого давления, к газу, к газу высокого давления. Компоненты могут быть расположены в корпусах следующим образом.
Наиболее прочные компоненты могут быть установлены в корпус, наполненный жидкостью высокого давления.
Устойчивые к жидкости компоненты, которые имеют низкую устойчивость к давлению, могут быть установлены в корпус, наполненный жидкостью низкого давления.
Компоненты, которые не устойчивы к жидкости, но устойчивы к газу высокого давления, могут быть установлены в корпус, наполненный газом высокого давления.
Компоненты, которые устойчивы лишь к газу низкого давления, могут быть установлены в корпус, наполненный газом низкого давления.
В разных корпусах должны использоваться подходящие для них способы охлаждения.
Компоненты, находящиеся в разных корпусах, соединены друг с другом проводами, которые проходят сквозь каналы в стенках этих корпусов. Кроме того, между корпусами могут быть расположены соединительные приспособления, которые пригодны для использования под водой и позволяют устанавливать и отделять каждый корпус индивидуально.
Необходимо отметить, что описанное выше разделение компонентов и их оптимальное расположение в разных корпусах, между которыми имеется необходимое количество каналов и соединительных приспособлений, может также быть использовано в подводных ротационных устройствах, повышающих частоту.
Примечания
Одним важным признаком изобретения является то, что, хотя обычно частотный регулятор скорости вращения используется на ближнем конце подводного передающего электроэнергию проходящего на некоторое расстояние кабеля, нет необходимости в быстрой регулировке электрической частоты для электродвигателей, являющихся нагрузками. Скорость вращения электродвигателя регулируется медленно в течение нескольких лет по мере разработки продуктивного пласта и постепенного падения в нем давления, и это падение давления в продуктивном пласте требует увеличения производительности насосов и компрессоров, т.е. увеличения скорости вращения электродвигателя. Этот факт позволяет, например, на некоторое время отключать имеющиеся электродвигатели для присоединения еще одного электродвигателя. Альтернативно, неиспользуемый электродвигатель может быть присоединен в качестве нагрузки, если вычисления показали, что это выгодно для устранения или уменьшения резких повышений тока или других возмущений в системе электропередачи. В зависимости от количества уже задействованных электродвигателей, может быть выгодным временно понижать электрическую частоту перед прямым пуском от сети еще одного электродвигателя. Если необходимо, подачу электроэнергии можно прекращать при запуске дополнительного электродвигателя, после чего запускать все электродвигатели одновременно и одновременно увеличивать скорость их вращения. В компрессорной станции имеется еще одна функциональная возможность, заключающаяся в том, что перед пуском всех остановленных компрессоров и насосов их выходные каналы присоединяют к их входным каналам (выполняют зацикливание), затем компрессоры и насосы запускают и доводят до желаемой производительности и после этого выполняют расцикливание.
Описанные выше устройства и способы позволяют справиться с емкостным эффектом и скин-эффектом и тем самым значительно увеличить расстояние стабильной подводной передачи электроэнергии высокого напряжения.
Благодаря этому максимальное практическое расстояние удаления может быть значительно увеличено без введения подводных частотных регуляторов скорости вращения с местным подводным управлением частотой.
Как на фигуре 4, так и на фигуре 5 устройства, повышающие частоту, не имеют местной управляющей системы, которая изменяет электрическую частоту и, следовательно, скорость вращения электродвигателей в соответствии с необходимым объемом добычи; эти устройства не осуществляют непосредственное управление понижением частоты с целью введения в работу электродвигателей, которые были остановлены, и не осуществляют непосредственное управление повышением частоты с целью получения необходимой скорости вращения электродвигателей для обеспечения необходимого объема добычи.
Если ротационное устройство, повышающее частоту, имеет подшипники, смазываемые маслом, нет необходимости в управляющей системе для этого узла, а могут использоваться лишь средства мониторинга, например, вибраций и температуры, если это необходимо.
Как было сказано в разделе «Уровень техники», скорость вращения компрессоров обычно находится в диапазоне, например, от 4000 об/мин до 14000 об/мин, а насосов - в диапазоне, например, от 2000 об/мин до 5000 об/мин. Когда электродвигатели компрессоров и насосов в системе согласно изобретению (четвертое и пятое технические решения) питаются электроэнергией одной и той же частоты через общий подводный передающий электроэнергию проходящий на некоторое расстояние кабель, скорость вращения насосов может с легкостью быть уменьшена до нужной величины (равной половине скорости вращения компрессора) путем использования электродвигателей с 4 и более полюсами для насосов и 2-полюсных электродвигателей для компрессоров. Если насосы используются для контроля уровня жидкости в сепараторе компрессорной станции, то достаточное заполнение насоса указанной жидкостью может быть обеспечено зацикливанием и использованием регулировочных клапанов.
Таким образом, скоростью вращения насосов можно управлять одним из следующих способов.
- Использование подводного устройства, повышающего частоту, - одного для каждого электродвигателя насоса.
- Использование подводного устройства, повышающего частоту, - одного для нескольких электродвигателей насосов.
- Питание электродвигателей насосов электроэнергией той же частоты, что и электродвигателей компрессоров, при этом электродвигатели насосов должны иметь удвоенное количество полюсов (по отношению к электродвигателям компрессоров), чтобы скорость их вращения была вдвое меньше скорости вращения электродвигателей компрессоров.
- Питание электродвигателей насосов электроэнергией с частотой передачи.
Что касается количества подводных устройств, повышающих частоту, независимо от того, ротационные они или статические, их количество может быть равно количеству электродвигателей (одно такое устройство для каждого электродвигателя), может быть равно единице (одно общее устройство для всех электродвигателей) или может быть равно некоторому промежуточному числу (например, может использоваться одно такое устройство для крупного электродвигателя компрессора и одно такое устройство для нескольких более мелких электродвигателей насосов; либо для электродвигателей насосов такое устройство может вовсе не использоваться).
Несколько предлагаемых сочетаний частотных регуляторов скорости вращения, расположенных на ближнем конце; некоторого количества подводных приводов; 3-фазной линии электропередачи
3-фазная линия электропередачи состоит из трех отдельных кабелей, которые изолированы и собраны в жгут. При передаче электроэнергии на большое расстояние более чем одному электродвигателю, например, двум электродвигателям двух компрессоров, настоящая технология позволяет собирать линии электропередачи этих электродвигателей в жгут, т.е. с получением жгута из шести кабелей. Это уменьшает расходы на прокладку линий электропередачи и, в то же время, обеспечивает возможность индивидуальной частотной регулировки скорости вращения каждого из этих двух электродвигателей, находящихся на дальних концах этих двух линий электропередачи, которые собраны в жгут. Имеется одно устройство, повышающее частоту, для каждого электродвигателя. Такая компоновка показана на фигуре 7. В этом случае электродвигатель представляет собой высоковольтный электродвигатель, а передаваемое напряжение может составлять, например, 100 кВ, и нет необходимости в подводных трансформаторах. В этом случае размыкатель цепи должен быть расположен после электрогенератора, где напряжение является приемлемым, поскольку подводные размыкатели цепи для очень высоких напряжений порядка 100 кВ в настоящее время не существуют.
Еще одним путем уменьшения расходов является техническое решение, показанное на фигуре 4 с гидравлическим устройством плавного пуска, расположенным между электродвигателем М и электрогенератором G; при такой компоновке электродвигатели М1-М4 могут запускаться независимо друг от друга без неприемлемых пусковых токов. Все электродвигатели работают с одинаковой скоростью вращения (при равном количестве пар полюсов), что не является проблемой для одинаковых машин, например, компрессоров.
Менее сложной конструкцией является техническое решение, показанное на фигуре 4, без устройств плавного пуска. В этом случае необходимо запускать все компрессоры одновременно, что менее удобно, но не является проблемой, поскольку количество запусков в год ограничено.
В Таблице 2 перечислены позиции, используемые на фигурах, и их значения.
Краткое описание графических материалов
Изобретение изображено на фигурах, на которых
Фигуры 1-3 иллюстрируют варианты осуществления уровня техники,
фигуры 4-8 иллюстрируют варианты осуществления изобретения.
Осуществление изобретения
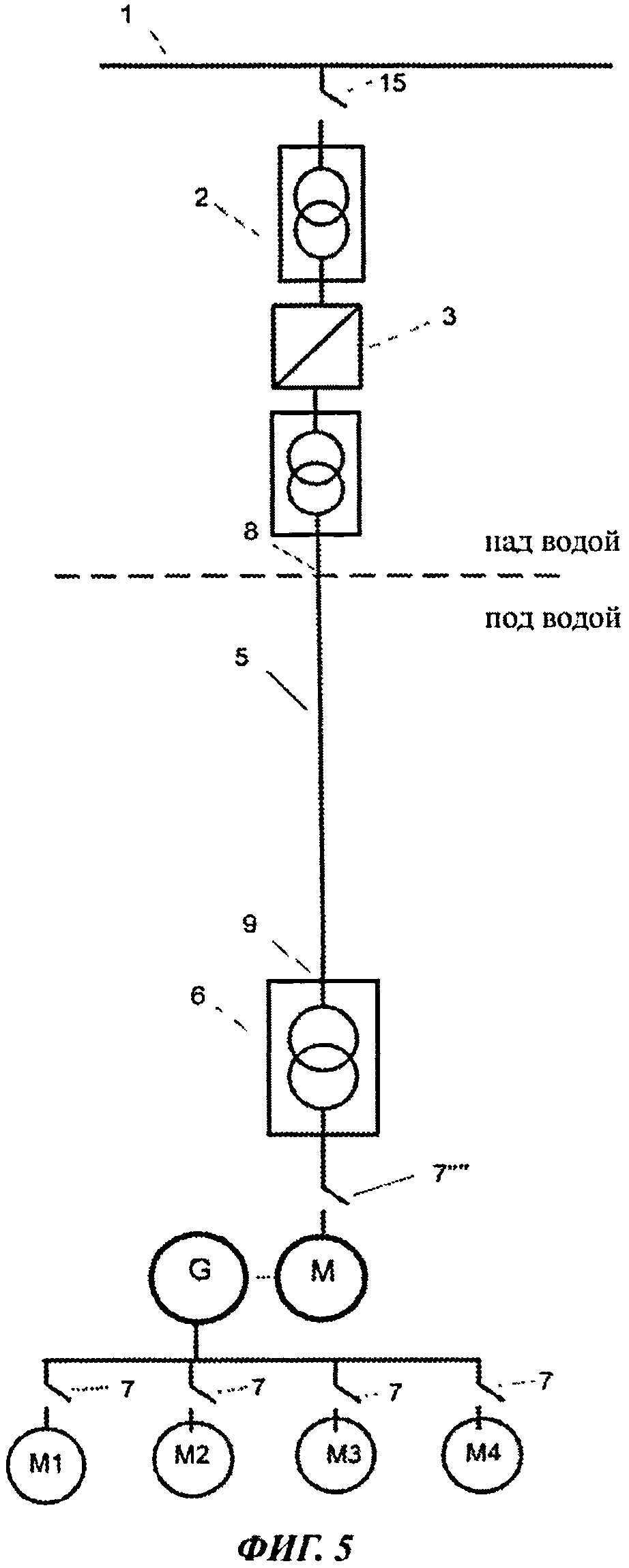
Рассмотрим фигуру 4, иллюстрирующую один вариант осуществления настоящего изобретения. Узел 1 электроснабжения присоединен к источнику электроэнергии; источник электроэнергии представляет собой местную сеть электроснабжения или, например, местную систему генерации электроэнергии. Частотный регулятор 3 скорости вращения присоединен к узлу 1 электроснабжения. Между частотным регулятором 3 скорости вращения и узлом 1 электроснабжения часто бывает присоединен входной трансформатор 2, понижающий напряжение, для понижения напряжения узла 1 электроснабжения (например, 13,8 кВ) до номинального входного напряжения частотного регулятора 3 скорости вращения (например 6 кВ). Трансформатор 2, понижающий напряжение, может быть составной частью частотного регулятора 3 скорости вращения, как предлагается некоторыми поставщиками. Обычно трансформатор 4, повышающий напряжение, необходим для присоединения частотного регулятора 3 скорости вращения к высоковольтной линии 5 электропередачи, которая в данном примере подводной передачи электроэнергии представлена подводным передающим электроэнергию проходящим на некоторое расстояние кабелем. Обычное напряжение, прикладываемое к этому кабелю, может составлять, например, приблизительно 120 кВ. Этот кабель укладывают в море от ближнего конца 8 к подводному дальнему концу 9; этот кабель имеет такую рабочую длину, при которой емкостный эффект может наблюдаться, но не достигает неприемлемых величин. Иными словами, длина этого кабеля может составлять от 20 км до 100 км и, возможно, больше в зависимости от расположения и свойств подводных нагрузок. На дальнем конце 9 кабеля расположен трансформатор 6, понижающий напряжение, например, до 20 кВ, подходящих для размыкателей 7, 7', 7”, 7'” цепи, за которыми следуют трансформаторы 13, 13', 13”, 13'”, понижающие напряжение, например, до 6 кВ, подходящих для электродвигателей подводных ротационных устройств, повышающих частоту, или для подводных статических устройств, повышающих частоту, а также для электродвигателей М1, М2, M3, М4. Показаны четыре подводных электродвигателя, два из которых могут представлять собой электродвигатели М1, М2 компрессоров, а два других - электродвигатели M3, М4 насосов.
Трансформаторы 13, 13', 13”, 13'”, понижающие напряжение, по существу являются необязательными, поскольку трансформатор 6, понижающий напряжение (см. фигуры 4 и 5), может непосредственно понижать напряжение до уровня, подходящего для подводных устройств, повышающих частоту, как показано на фигуре 5. Включение трансформаторов 13, 13', 13”, 13'”, понижающих напряжение, является лишь вопросом оптимизации системы распределения электроэнергии, расположенной на дальнем конце.
Подводные ротационные устройства, повышающие частоту, показанные на фигурах 4 и 5 повышают частоту передачи с необходимым коэффициентом повышения за счет подбора количества полюсов электродвигателя М и электрогенератора G.
Фигуры не показывают использование подводных статических устройств, повышающих частоту, но их использование можно представить, просто заменив на фигурах 4 и 5 ротационные устройства, повышающие частоту, статическими устройствами, повышающими частоту.
Необходимо подчеркнуть, что ключевыми компонентами систем электропередачи, показанных на фигурах 4 и 5, являются узел 1 электроснабжения, частотный регулятор 3 скорости вращения, линия 5 электропередачи и система из электродвигателя и электрогенератора. Другие компоненты, например, трансформаторы 2, 4, 6, 13, 13', 13”, 13'”, повышающие и понижающие напряжение, и размыкатели 15, 7, 7', 7”, 7'” цепи, вводятся исходя из необходимости в каждом отдельном случае.
Если, например, электродвигатель М системы из электродвигателя и электрогенератора относится к типу с изолированными кабелями в статоре, он может работать при гораздо более высоком напряжении, чем электродвигатели с обычной обмоткой. В этом случае трансформаторы 2, 6 и 13, понижающие напряжение, могут быть не нужны. Кроме того, если требуется постоянная скорость вращения электродвигателей М1-М4, которая определяется устройствами, повышающими частоту, частотный регулятор 3 скорости вращения может не использоваться.
Еще одним преимуществом высоковольтных подводных электродвигателей с изолированными кабелями в статоре является то, что в них требуется прохождение меньшего тока (меньшего количества ампер) через каналы, проходящие сквозь корпус электродвигателя, чем в электродвигателях стандартного напряжения порядка 6 кВ. Это позволяет использовать более мощные электродвигатели, чем в современном уровне техники, где на сегодняшний день мощность приблизительно 12 МВт является максимумом ввиду ограничения пропускной способности по току.
Стоимость длинных подводных кабелей и подводных частотных регуляторов скорости вращения высока; к тому же подводные частотные регуляторы скорости вращения в техническом решении из фигуры 2, в дополнение к их высокой стоимости, снижают надежность всей системы. Для того чтобы техническое решение из фигуры 2 стало более выгодным, в нем использован один общий подводный передающий электроэнергию проходящий на некоторое расстояние кабель, а не четыре таких кабеля, как в техническом решении из фигуры 1, благодаря чему обеспечивается значительная экономия.
Необходимо отметить, что, хотя один общий подводный передающий электроэнергию проходящий на некоторое расстояние кабель является выгодным с точки зрения издержек, с технической точки зрения не является проблемой наличие одного такого кабеля для каждого подводного устройства, повышающего частоту. Это может быть оптимальным техническим решением для средних расстояний удаления, например, 35-75 км, т.е. расстояний, при которых стоимость этого кабеля не становится чрезмерно высокой. Если имеется один частотный регулятор скорости вращения на один подводный передающий электроэнергию проходящий на некоторое расстояние кабель, т.е. один частотный регулятор скорости вращения на один подводный электродвигатель, то обеспечена возможность индивидуального управления скоростью вращения каждого электродвигателя.
Краткое описание предлагаемого подводного устройства, повышающего частоту.
Является проблематичным или даже невозможным передавать электроэнергию высокого напряжения и большой мощности на большой частоте (например, более 100 Гц) на большие расстояния под водой (например, более 40 км) для питания высокооборотных электродвигателей для подводных насосов и компрессоров. Это обусловлено емкостным эффектом, который может создавать избыточное напряжение и нестабильность в системе электропередачи, а также скин-эффектом, который создает большое активное сопротивление и, следовательно, высокое напряжение и потери мощности.
Подводные частотные регуляторы скорости вращения, для которых частота передачи может быть низкой (например, 50 Гц) являются решением этой проблемы. Однако они являются крупными и содержат большое количество чувствительных и хрупких электрических и электронных компонентов и управляющую систему, которые увеличивают стоимость этих подводных частотных регуляторов скорости вращения и создают высокую вероятность выхода из строя.
Изобретением предлагается решение этой проблемы, заключающееся в использовании частотного регулятора скорости вращения, который состоит из расположенной на поверхности (на платформе или на суше) управляющей системы и простых подводных устройств, повышающих частоту, которые являются ротационными или статическими и расположены вблизи подводных электродвигателей. Эти подводные устройства, повышающие частоту, не осуществляют непосредственное управление частотой электрического тока, подаваемого в электродвигатели, а их единственной функцией является повышение (с подходящим коэффициентом повышения) частоты передачи, которая является изменяемой и задается в соответствии с потребностями электродвигателей. В случае ротационных подводных устройств, повышающих частоту, коэффициент повышения обеспечен соотношением между количеством полюсов электродвигателя и электрогенератора. Коэффициент повышения равен, например, 2, если электрогенератор является 4-полюсным, а электродвигатель - 2-полюсным.
Ротационные подводные устройства, повышающие частоту, добавляют индуктивности системе электропередачи и, следовательно, являются выгодными, поскольку компенсируют большую емкость подводного передающего электроэнергию проходящего на некоторое расстояние кабеля, благодаря чему компенсирующая система, расположенная на ближнем конце этого кабеля, может быть устранена.
Если используются статические устройства, повышающие частоту, они могут быть более простыми, чем подводные частотные регуляторы скорости вращения, поскольку коэффициент повышения может быть постоянным. Если коэффициент повышения является изменяемым, то система управления повышением частоты может быть расположена на поверхности и может быть либо присоединена к расположенному на поверхности частотному регулятору скорости вращения, либо интегрирована в него.
Вариант осуществления с преобразованием переменного тока в постоянный ток для приведения в действие электродвигателей постоянного тока.
Еще один вариант осуществления изобретения, в котором может иметься расположенный на поверхности частотный регулятор скорости вращения для управления скоростью вращения подводных электродвигателей, находящихся на больших расстояниях удаления, характеризуется преобразованием передаваемого переменного тока в постоянный ток под водой вблизи указанных электродвигателей. Термин «вблизи» в данном контексте означает «достаточно близко для поддержания приемлемого падения напряжения на активном сопротивлении и, следовательно, поддержания приемлемых потерь мощности между выпрямителями тока и электродвигателями». Рассмотрим фигуру 6, которая иллюстрирует систему электропередачи, проходящую от расположенного на поверхности частотного регулятора 3 скорости вращения к подводному выпрямителю 16 тока, который подает постоянный ток в подводные электродвигатели.
Выпрямитель тока может быть ротационным, и в этом случае статические выпрямители 16, 16', 16”, 16'” тока заменены ротационными выпрямителями тока, которые по существу представляют собой систему из электродвигателя и электрогенератора, в которой электрогенератор представляет собой электрогенератор постоянного тока, к которому присоединена нагрузка постоянного тока, например, электродвигатель, как показано на фигурах 4-8; в случае, когда электрогенератор представляет собой электрогенератор постоянного тока, питаемый им электродвигатель тоже должен представлять собой электродвигатель постоянного тока. Ротационный выпрямитель может быть расположен в корпусе высокого давления точно так же, как система из электродвигателя и электрогенератора, описанная выше в разделе «Конструкция подводного ротационного устройства, повышающего частоту».
Далее будет более подробно описано использование статического выпрямителя тока с твердотельными полупроводниковыми диодами.
Скорость вращения электродвигателя постоянного тока можно регулировать путем изменения способа подключения обмоток статора: параллельно с ротором (параллельное возбуждение), последовательно с ротором (последовательное возбуждение) или часть обмоток статора параллельно с ротором, часть - последовательно с ротором (смешанное возбуждение).
Скорость вращения электродвигателя постоянного тока прямо пропорциональна напряжению питания. Поэтому подходящим альтернативным способом регулировки скорости вращения является регулировка напряжения, обеспечиваемого электрогенератором постоянного тока.
Альтернативно, один общий выпрямитель тока может быть использован для нескольких электродвигателей. В этом случае индивидуальное управление скоростью вращения электродвигателей может обеспечиваться путем изменения способа подключения обмоток статора: параллельно с ротором (параллельное возбуждение), последовательно с ротором (последовательное возбуждение) или часть обмоток статора параллельно с ротором, часть - последовательно с ротором (смешанное возбуждение).
Выпрямитель тока может быть расположен в сосуде высокого давления подобно подводному статическому устройству, повышающему частоту.
Системы и способы согласно настоящему изобретению могут включать признаки и этапы, описанные выше, в любых работоспособных сочетаниях, и каждое такое сочетание представляет собой вариант осуществления изобретения.
Реферат
Изобретение относится к подводному оборудованию для добычи нефти, в частности к средствам передачи переменного тока большой мощности на большие расстояния. Техническим результатом является исключение влияния емкостного эффекта и скин-эффекта для обеспечения возможности передачи электрического питания к оборудованию, расположенному на большом удалении от источника питания. Предложена подводная система повышения давления для работы под водой на расстояниях удаления более 40 км, которая содержит по меньшей мере один передающий электроэнергию подводный протяженный кабель, проходящий от ближнего конца, расположенного в сухом месте на суше или на верхней поверхности надводного объекта, к дальнему концу, расположенному возле одной или более подводной нагрузки, такой как подводные насосы, подводные компрессоры или другие нагрузки. Причем к ближнему концу присоединен по меньшей мере один источник электроэнергии для подачи электроэнергии постоянной частоты, а размеры кабеля выбраны из условия работы на этой частоте или на более низкой частоте, при работе на которой к ближнему концу кабеля подключено понижающее частоту устройство, с тем чтобы контролировать емкостный эффект и электрические потери. Кроме того, система содержит по меньшей мере один активный преобразователь электрической частоты, функционально включенный между дальним концом кабеля и подводными нагрузками. Причем указанный преобразователь расположен в емкости высокого давления и преобразует рабочую частоту указанного кабеля в частоту, подходящую для приведения в действие присоединенных подводных нагрузок. 3 н. и 7 з.п. ф-лы, 8 ил., 4 табл.
Формула
при этом согласно способу регулируют скорость присоединенных нагрузок только посредством регулировки рабочих параметров оборудования, подключенного к ближнему концу, расположенному на верхней поверхности надводного объекта или на суше, подводного протяженного кабеля.
Документы, цитированные в отчёте о поиске
Система энергоснабжения (варианты)
Комментарии