Система энергоснабжения (варианты) - RU2330939C1
Код документа: RU2330939C1
Чертежи































Описание
Область техники, к которой относится изобретение
Электрическая система управления и питания содержит узел питания и управления в первом пункте, и управляющий и исполнительный узел в удаленном пункте, связанном с удаленным устройством. Кабель проходит между узлом питания и управления и управляющим и исполнительным узлом и соединяет их для подачи постоянного напряжения к управляющему и исполнительному узлу. Электрическая система управления и питания может быть использована, например, при добыче нефти и газа, и может быть использована как с наземными скважинами, так и с морскими скважинами. При использовании с морскими скважинами узел питания и управления расположен на платформе или судне на поверхности моря, а управляющий и исполнительный узел расположен в удаленном пункте под водой, например, на морском дне. Кабель уходит под воду от узла питания и управления, подводя постоянное напряжение к удаленному подводному управляющему и исполнительному узлу. Подводный управляющий и исполнительный узел соединен с различными электрическими устройствами, например двигателями, электрическими приводами и аналогичным оборудованием, посредством соответствующих соединительных линий.
Уровень техники
Как правило, подводное оборудование (например, управляющие и исполнительные системы) имеет гидравлические управление и исполнительные механизмы. Однако гидравлические питающие линии громоздки и дороги. Кроме того, гидравлическое оборудование, например насосы на поверхности, из-за своих габаритов занимает много места на платформе или судне. Одним из способов решения проблем, возникающих в связи с гидравлическим оборудованием, является использование подводного инструмента с электрическим приводом. Таким образом, существует необходимость в создании электрических систем управления и питания для подводного инструмента.
Существующие электрические системы управления и питания включают систему энергоснабжения на поверхности, которая передает переменное напряжение по подводному кабелю на дно. Амплитуда и частота переменного напряжения выбирается таким образом, чтобы, например, подводный инструмент, подключенный к подводному кабелю, получал для своей работы подходящее напряжение. Каждый подводный инструмент подключен к отдельному подводному кабелю. Кроме того, по отдельным подводным кабелям производится передача данных между поверхностью и морским дном.
На Фиг.1(А) показана известная система 1 управления и питания, в которой устройство 3 подачи напряжения и управления, имеющее соответствующее устройство 7 с источником напряжения и мультиплексором, установлено над поверхностью 4 моря. Источник 3 напряжения передает переменное напряжение по подводному кабелю 5 непосредственно на управляющее и исполнительное устройство 6, установленное ниже уровня моря. Управляющее и исполнительное устройство 6 соединено по соединительным линиям 8 с соответствующими электрическими устройствами 2 или электрическими блоками 9. Электрический блок 9 может быть образован группой электрических устройств 2, которые, например, размещены в виде древовидной структуры и имеют общее управление и исполнительные механизмы.
Для передачи данных и сигналов управления между устройством 3 питания и управления и управляющим и исполнительным устройством 6 используется кабель 10 передачи данных. В предпочтительном варианте, кабель 10 передачи данных выполняется в виде коаксиальных кабелей.
Обычно по подводному кабелю 5 передается напряжение переменного тока максимальной величины 600 В. Для питания соответствующих электрических устройств переменным напряжением 240 В с соответствующей мощностью потребления, в подводном кабеле требуются провода с площадью сечения по крайней мере 175 мм2, при длине кабеля, составляющей, например, 50 км. Управляющее и исполнительное устройство 6 включает, по крайней мере, одно исполнительное устройство 11 с двигателем и систему 12 управления. Различные двигатели, в качестве электрических устройств 2, могут быть использованы для приведения в действие клапанов, противовыбросовых устройств и аналогичного оборудования, используемого при добыче нефти или газа на морском дне.
Одним из недостатков существующих систем управления и питания, например, показанной на Фиг.1(А), является потребность в дорогом подводном кабеле. Например, для питания подводного электрического устройства переменным напряжением 240 В по подводному кабелю длиной от 30 до 50 км с морской поверхности к подводному электрическому устройству, подводный кабель должен иметь площадь сечения от 100 до 200 мм2. Кроме того, требуются линии передачи данных, поэтому подводный кабель может иметь значительный диаметр и иметь большую стоимость.
В приведенном примере предполагалось, что переменного напряжения 240 В достаточно для подводных электрических устройств. Было, однако, установлено, что требуются и более высокие напряжения, например, для приведения в действие некоторых подводных электрических устройств, например, серводвигателей, потребляющих большую мощность, используемых, например, для закрывания клапанов в процессе добычи нефти и газа за время не более одной минуты. Если для питания таких устройств требуется большее напряжение, то это влечет дальнейшее увеличение сечения подводного кабеля.
Кроме того, практика показала, что при включении серводвигателя как электрического устройства, и, особенно, серводвигателя большой мощности, даже при замедлении процесса пуска, по подводному кабелю на устройство питания и управления на поверхности поступает сигнал обратной связи, который процесс включения серводвигателя представляет как короткое замыкание на конце кабеля. Это ведет к отключению любых систем, автоматически защищаемых от короткого замыкания.
Кроме того, в описанных выше известных системах питания и управления, общий коэффициент полезного действия системы по выходной мощности достигает только 27%.
Другая известная система управления и питания с передачей переменного напряжения по подводному кабелю 5 показана на Фиг.1(В). В этом случае, однако, передается переменное напряжение до 10000 В, которое, перед подачей на управляющее и исполнительное устройство 6, понижается соответствующим трансформатором 13 до напряжения требующейся для электрических устройств величины. Далее, в этой известной системе используется отдельный проводник 10 для передачи данных в виде коаксиального кабеля или аналогичного кабеля. Для управляющего и исполнительного устройства 6, в соответствии с Фиг.1(В), требуются дорогие силовые конденсаторы 14 для сглаживания пониженного переменного напряжения нужным образом. Кроме того, в этой известной системе, так же, как и в системе, показанной на Фиг.1(А), требуются устройства для улучшения коэффициента мощности для снижения кажущейся мощности системы для достижения приемлемой общей эффективности системы. Подобные устройства очень сложны и, как правило, довольно дороги и состоят из конденсаторов и подобных компонентов.
В известной системе согласно Фиг.1(В) и для соответствующих значений напряжений и мощности подводных электрических устройств площади сечения проводов в подводном кабеле достигают, например, по крайней мере 75 мм2 для длины 50 км или, при использовании коррекции коэффициента мощности, по крайней мере 26 мм2 для 50 км длины кабеля. Однако даже в полностью оборудованных известных системах, описанных выше, коэффициент полезного действия обычно менее 70%, а площади сечения проводов в подводном кабеле составляет приблизительно 16 или 25 мм2 при длине кабеля 30 км или 50 км, соответственно.
Для преобразования высокого напряжения (постоянного или переменного тока) в более низкое напряжение (постоянного или переменного тока) используются преобразующие устройства. Если на вход подается высокое напряжение, соответствующее преобразование в другое напряжение обычно затруднено, поскольку соответствующие компоненты преобразующего устройства не обладают достаточной электрической прочностью. Кроме того, при передаче высокой мощности в преобразующем устройстве может выделяться много тепла, даже если потери мощности составляют всего 10-20%. Для отвода тепла, выделившегося при потере мощности, необходимы соответствующие средства охлаждения. Это делает преобразующее устройство более дорогим и громоздким за счет наличия дополнительных средств охлаждения. Компоненты, обладающие электрической прочностью более 1000 В, например 3000 В или 6000 В, однако, либо отсутствуют, либо сложны для технической реализации. Если же подобный преобразователь подходит для работы с такими высокими постоянными напряжениями, вся система выйдет из строя, если работа преобразователя будет нарушена. Кроме того, даже если эффективность сравнительно высока, преобразующее устройство будет иметь мощность рассеяния, которая приведет к выделению значительного количества тепла в достаточно небольшом объеме. Это тепло может повредить некоторые компоненты преобразующего устройства. Для того чтобы избежать этого, необходимы сложные системы охлаждения, что влечет высокие затраты.
В настоящем изобретении недостатки известных устройств преодолены.
Раскрытие изобретения
Электрическая система управления и питания содержит узел питания и управления в первом пункте и управляющий и исполнительный узел в удаленном пункте, связанный с одним или более удаленных электрических устройств. Между ними проходит кабель, который соединяет узел питания и управления с управляющим и исполнительным узлом для подачи напряжения к управляющему и исполнительному узлу. Узел питания и управления в первом пункте включает источник переменного напряжения, подсоединенный к преобразователю переменного напряжения в постоянное напряжение. Преобразователь переменного напряжения в постоянное напряжение преобразует переменное напряжение от источника переменного напряжения в выходное высокое постоянное напряжение в первом пункте. Преобразователь переменного напряжения в постоянное напряжение содержит несколько компонентов преобразователя переменного напряжения в постоянное напряжение, которые на его входном конце включены параллельно источнику переменного напряжения и которые, на его выходном конце, включены последовательно с кабелем. Кабель проходит к управляющему и исполнительному узлу и связанным с ним электрическим устройствам на удаленном пункте. В предпочтительном варианте выполнения, управляющий и исполнительный узел включают преобразователь постоянного напряжения в постоянное напряжение, хотя может быть использован и преобразователь постоянного напряжения в переменное напряжение. Преобразователь постоянного напряжения в постоянное напряжение включает несколько компонентов преобразователя постоянного напряжения в постоянное напряжение, входы которых включены последовательно с кабелем, а выходы выдают пониженное постоянное напряжение к одному или более удаленных электрических устройств. Длина кабеля обычно составляет, по крайней мере, один километр.
Электрическая система управления и питания может дополнительно включать узел передачи данных для передачи сигналов данных по кабелю. Узел передачи данных может включать первое сопрягающее устройство передачи данных, соединенное с кабелем и обеспечивающее связь с удаленными электрическими устройствами по кабелю посредством сигналов, связанных с первым частотным диапазоном, при одновременной передаче по кабелю мощности питания к электрическим устройствам. Тактовые частоты работы одного или более компонентов преобразователей переменного напряжения в постоянное могут быть сдвинуты по фазе друг относительно друга для переноса помехи тактовых импульсов из первого частотного диапазона во второй частотный диапазон. Кроме того, управляющий и исполнительный узел может дополнительно включать узел передачи данных для передачи сигналов данных по кабелю. Узел передачи данных может включать второе сопрягающее устройство передачи данных, соединенное с кабелем и обеспечивающее связь с узлом управления и питания по кабелю посредством сигналов, связанных с первым частотным диапазоном, при одновременной передаче по кабелю мощности питания к электрическим устройствам. В предпочтительном варианте выполнения, тактовые частоты работы одного или более компонентов преобразователей постоянного напряжения в постоянное напряжение могут быть сдвинуты по фазе друг относительно друга для переноса помехи тактовых импульсов из первого частотного диапазона во второй частотный диапазон. Могут быть использованы фильтры в первом пункте и в удаленном пункте для подавления помехи, передаваемой по кабелю. В предпочтительном варианте выполнения, помеха, связанная со вторым частотным диапазоном, снижается или устраняется фильтрами.
Электрическая система управления и питания также включает первый контроллер, соединенный с преобразователем переменного напряжения в постоянное напряжение, обеспечивающий управление одной или более функциями преобразователя переменного напряжения в постоянное напряжение, и второй контроллер, соединенный с преобразователем постоянного напряжения в постоянное напряжение, обеспечивающий управление одной или более функциями преобразователя постоянного напряжения в постоянное напряжение. Первое устройство ввода/вывода данных подключено к первому контроллеру, позволяя первому контроллеру вводить данные в кабель и получать данные из кабеля, а второе устройство ввода/вывода данных подключено ко второму контроллеру, позволяя второму контроллеру вводить данные в кабель и получать данные из кабеля.
Управляющий и исполнительный узел электрически подключен к одному или более электрических устройств для питания, в предпочтительном варианте выполнения, напряжением постоянного тока. Электрическое устройство одного типа может содержать исполнительный механизм для клапанов, заслонок и других запорных элементов. Исполнительный механизм содержит электрический двигатель, запитанный вторым постоянным напряжением на удаленном пункте. С электрическим двигателем соединен вращающийся ходовой винт, а исполнительный элемент может перемещаться вдоль оси в направлении подачи вращающимся ходовым винтом, направление вращения которого соответствует направлению подачи. Электрический двигатель, вращающийся ходовой винт и исполнительный элемент закрыты кожухом. С вращающимся ходовым винтом и кожухом соединена первая цилиндрическая пружина таким образом, что первая цилиндрическая пружина предотвращает движение вращающегося ходового винта в направлении, противоположном направлению подачи. Исполнительный механизм также включает систему, которая при подаче электрического питания освобождает первую цилиндрическую пружину, чтобы дать возможность вращающемуся ходовому винту перемещаться в направлении, противоположном вращению в направлении подачи. Система также включает узел экстренного отключения, используемый для перемещения исполнительного элемента в направлении, противоположном направлению подачи, при прерывании постоянного напряжения.
Исполнительный механизм также включает датчик положения, используемый для определения осевого положения исполнительного элемента. Для обеспечения резервирования к вращающемуся ходовому винту могут быть подключены два электродвигателя.
В предпочтительных вариантах выполнения изобретения, подводный кабель имеет значительно сниженные размер (площадь сечения) и стоимость. По крайней мере, в некоторых вариантах выполнения, передача по подводному кабелю постоянного напряжения питания вместо переменного напряжения питания позволяет снизить размер и стоимость провода в кабеле. Далее, предпочтительные варианты выполнения изобретения дают возможность подводить высокое напряжение и большую мощность к подводным электрическим устройствам, обеспечивая стабильность электроснабжения.
Электрическая система управления и питания обладает рядом преимуществ, например, обеспечение электроснабжения на больших расстояниях без увеличения размера провода в соединительном кабеле, большая эффективность передачи мощности, обеспечение резервирования, выигрыш в стоимости.
Система в соответствии с изобретением, таким образом, отличается простотой и более высокой эффективностью (по крайней мере, 70%), при этом достигается значительное сокращение стоимости только за счет существенного сокращения сечения проводов в подводном кабеле.
Настоящая система не требует отдельного кабеля для передачи данных между электрическим узлом питания и управления и управляющим и исполнительным узлом, как в известных системах.
В соответствии с изобретением, имеются и другие преимущества, связанные с тем, что при передаче по кабелю постоянного напряжения модуляция частот для передачи данных осуществляется более просто. Это может выражаться, в частности, в том, что и в электрическом узле питания и управления, и в управляющем и исполнительном узле может использоваться одно модулирующее устройство для передачи данных. По крайней мере, в некоторых вариантах выполнения, устройства модуляции для передачи данных, используемые в управляющем и исполнительном узле, могут быть включены после компонентов преобразователей постоянного напряжения в постоянное напряжение и постоянного напряжения в переменное напряжение.
Таким образом, система обладает рядом преимуществ, например быстродействием, исключением гидравлических текучих сред, отсутствием просачивания текучей среды в море (экологическая безопасность) и возможностью диагностирования исполнительных механизмов, клапанов и заслонок в реальном масштабе времени. Исключается необходимость в использовании в надводном оборудовании гидравлической силовой установки, а надводное оборудование в целом получается более компактным. Цель настоящего изобретения, таким образом, состоит в улучшении системы энергоснабжения с тем, чтобы обеспечить надежную подачу высокого и стабильного напряжения, даже при высоком энергопотреблении, с умеренными затратами, без использования дополнительных компонентов, например для необходимого охлаждения. Цель настоящего изобретения состоит в создании системы энергоснабжения удаленных (например, подводных) электрических устройств с тем, чтобы гарантировать подачу мощности к удаленному электрическому устройству на большом расстоянии с малыми усложнениями конструкции и при низкой стоимости. Кроме того, система энергоснабжения обладает стабильностью, эффективностью и имеет резервирование.
Следует отметить, что благодаря подаче на электрические устройства постоянного напряжения, возможно использование тонких проводов в кабеле (с малым сечением), особенно при использовании в кабеле коаксиального провода; такие кабели с тонкими проводами обеспечивают значительное снижение в стоимости кабельного соединения. В частности, когда расстояния до электрических устройств измеряются километрами (например, 50 км) и когда коаксиальный кабель одновременно может быть использован также и для передачи данных, достигается значительное сокращение расходов.
Больше нет необходимости в использовании дорогостоящих конденсаторов, например, электролитических конденсаторов для фильтров сглаживания постоянного напряжения на выходе. Кроме того, коррекция коэффициента мощности может выполняться непосредственно в месте установки управляющего и исполнительного узла. Например, требуемые средства для выполнения этой коррекции могут быть включены в компоненты преобразователя постоянного напряжения в постоянное напряжение или постоянного напряжения в переменное напряжение, либо в его интегральную схему. Более того, высокая тактовая частота компонентов преобразователя постоянного напряжения в постоянное напряжение или постоянного напряжения в переменное напряжение одновременно гарантирует, что выборка постоянного напряжения на входе производится без пропусков, чем обеспечивается высокая эффективность.
Другие цели и преимущества изобретения будут очевидны из приведенного ниже описания.
Краткое описание чертежей
Для подробного описания предпочтительных вариантов выполнения изобретения, используются ссылки на приложенные чертежи, на которых:
Фиг.1(А)-(В) представляют схематические диаграммы различных известных систем управления и питания;
Фиг.1(С) представляет схему электрической системы управления и питания, в соответствии с вариантами выполнения настоящего изобретения;
Фиг.2 представляет блок-схему системы управления и питания, в соответствии с вариантами выполнения изобретения согласно Фиг.1(С);
Фиг.3 схематически представляет вариант выполнения узла питания и управления;
Фиг.4 представляет схему варианта выполнения высоковольтного преобразователя с прерыванием на входе, используемого в качестве компонента преобразователя;
Фиг.5 представляет блок-схему варианта выполнения преобразователя постоянного напряжения в соответствии с вариантами выполнения настоящего изобретения;
Фиг.6 представляет схему двухтактного преобразователя для использования в качестве импульсного источника питания силовой сети;
Фиг.7 представляет схему двухтактного преобразователя с полномостовым прерывателем;
Фиг.8 представляет схему двухтактного преобразователя с полумостовым прерывателем;
Фиг.9 представляет продольное сечение исполнительного механизма, в соответствии с вариантами выполнения настоящего изобретения, подключенного к устройству управления, например, запорному клапану;
Фиг.10 представляет продольное сечение исполнительного механизма, показанного на Фиг.9, по линиям II-II на Фиг.11;
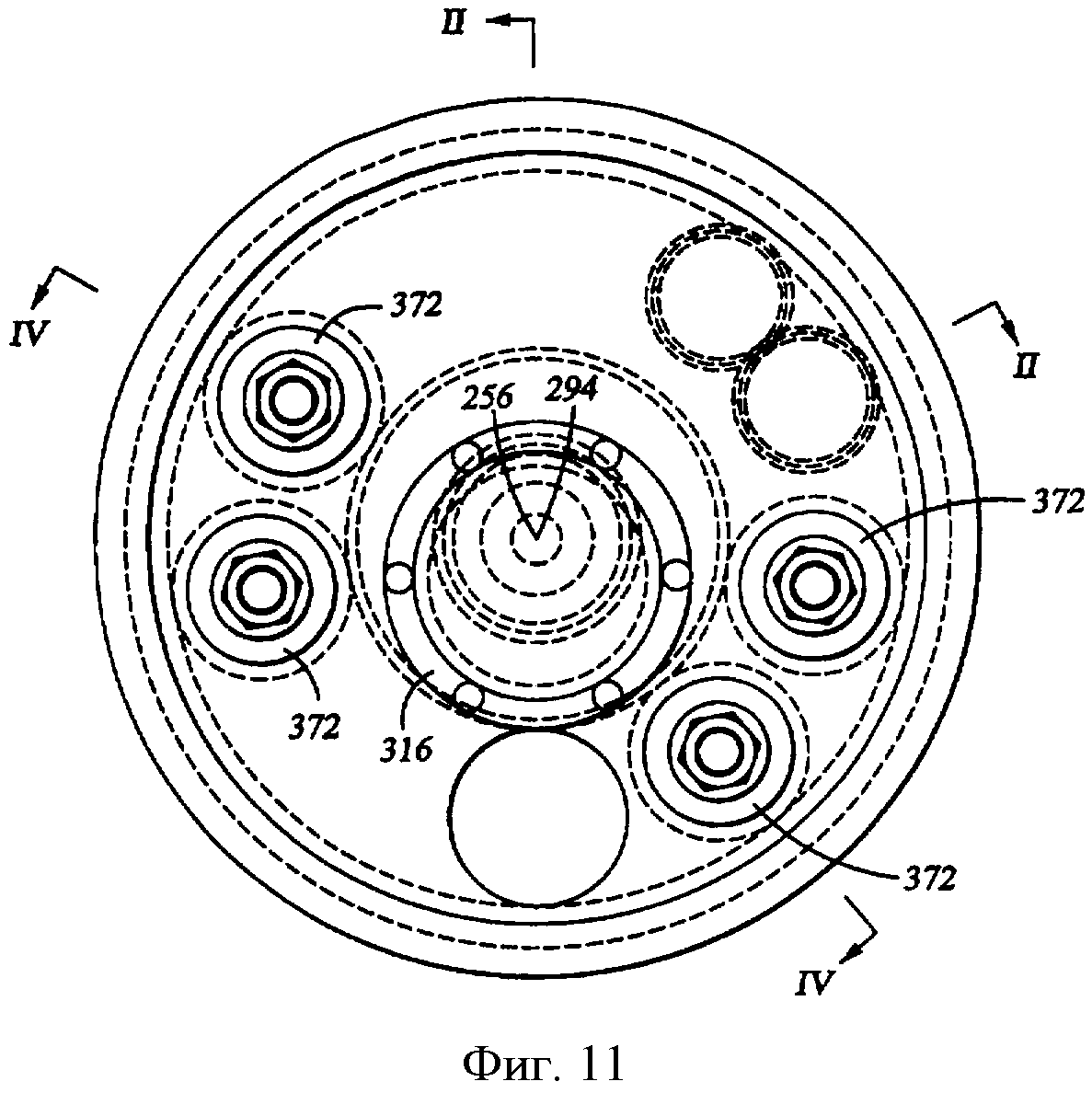
Фиг.11 представляет вид спереди исполнительного механизма, показанного на Фиг.10;
Фиг.12 представляет вид сечения по линии IV-IV на Фиг.11;
Фиг.13 представляет вырез по линиям А-С на Фиг.14;
Фиг.14 представляет вид спереди исполнительного механизма согласно вариантам выполнения настоящего изобретения;
Фиг.15 представляет продольное сечение части линейного управляющего устройства с встроенным узлом измерения перемещений;
Фиг.16 представляет увеличенное изображение детали "X";
Фиг.17 представляет увеличенное изображение детали "У";
Фиг.18 представляет схему;
Фиг.19 представляет обобщенное изображение исполнительного устройства в соответствии с вариантами выполнения настоящего изобретения с двумя отдельными электрическими двигателями и соответствующим устройством управления;
Фиг.20 представляет вид спереди корпуса исполнительного устройства в соответствии с вариантами выполнения настоящего изобретения;
Фиг.21 представляет сечение по линии IV-IV на Фиг.20;
Фиг.22 представляет вид сверху на первый вариант выполнения изолирующего устройства;
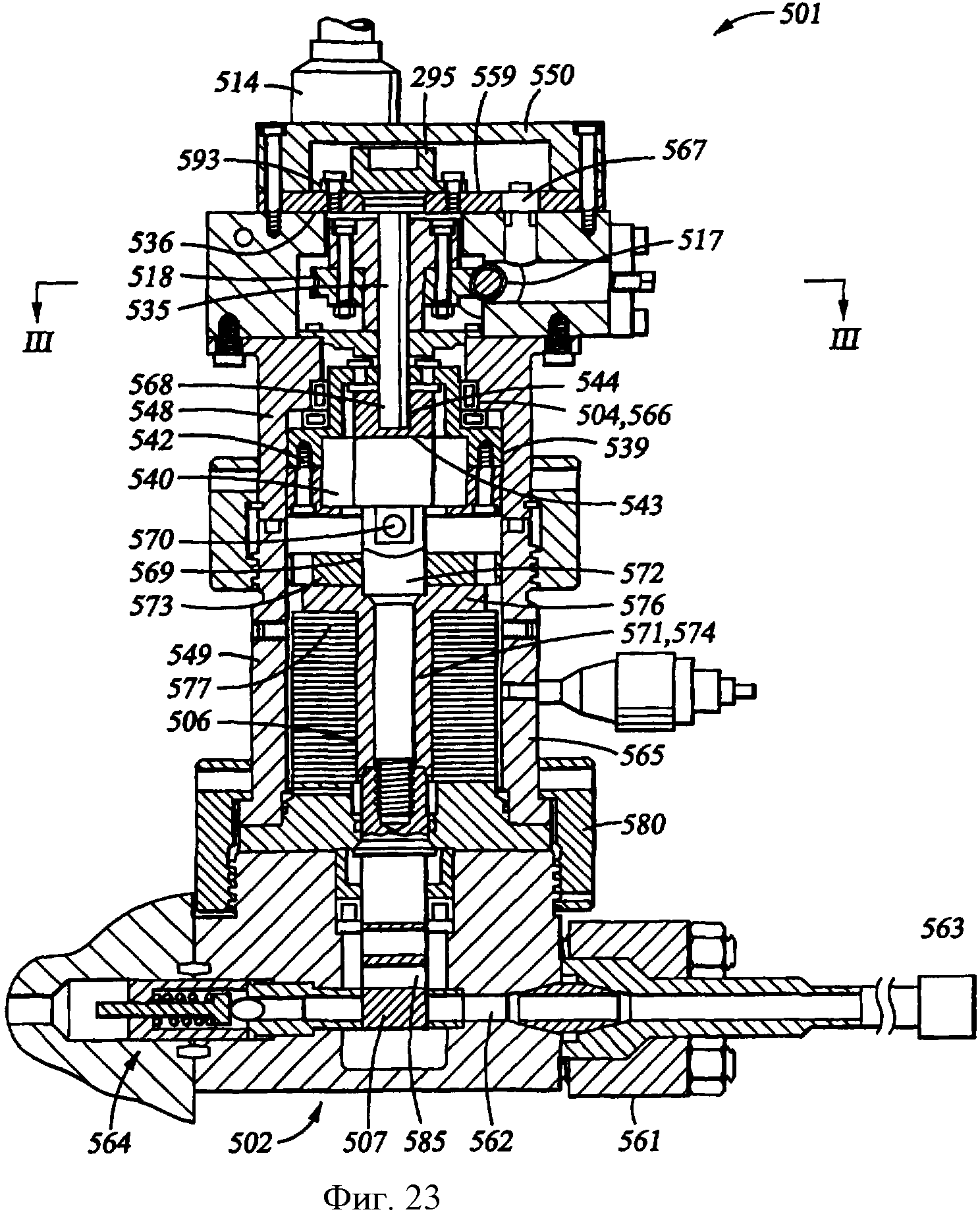
Фиг.23 представляет сечение по линии II-II на Фиг.22 с частично показанным инжекционным клапаном;
Фиг.24 представляет сечение по линии III-III на Фиг.22 или Фиг.23, соответственно;
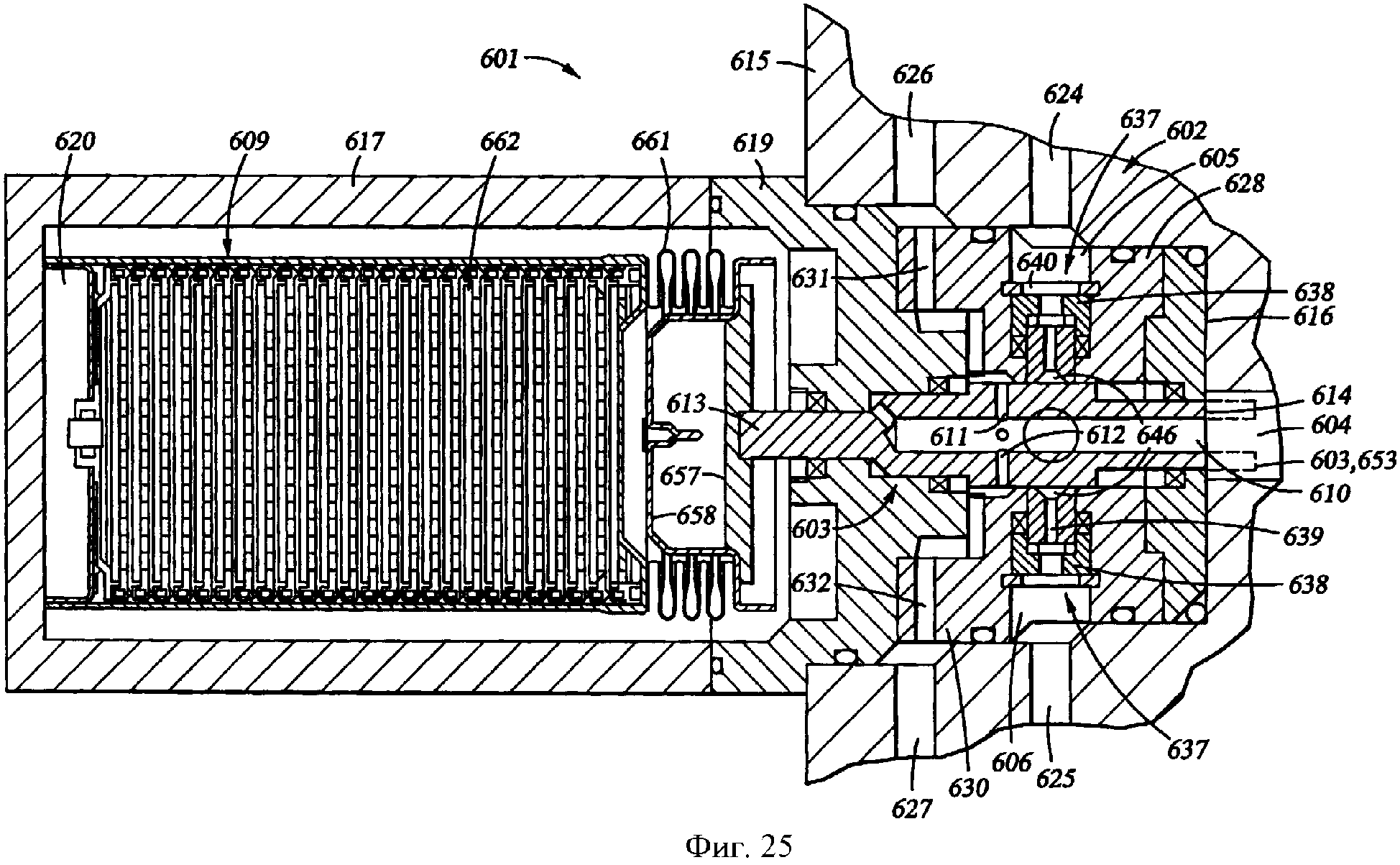
Фиг.25 представляет продольное сечение конкретной клапанной системы в соответствии с вариантами выполнения настоящего изобретения, включающей клапан и связанное с ним электрохимическое исполнительное устройство;
Фиг.26 представляет вид продольного сечения вращающегося регулирующего устройства в соответствии с вариантами выполнения настоящего изобретения, которое может устанавливаться на исполнительное устройство и сниматься с него;
Фиг.27 представляет увеличенное изображение примера выполнения вращающегося регулирующего устройства, показанного на Фиг.26, в соответствии с вариантами выполнения настоящего изобретения;
Фиг.28 представляет продольное сечение исполнительного устройства в соответствии с вариантами выполнения настоящего изобретения, содержащее дроссельное устройство со стороны входа текучей среды;
Фиг.29 представляет сечение по линии III-III на Фиг.31;
Фиг.30 представляет продольное сечение насосного устройства;
Фиг.31 представляет вид варианта выполнения системы подводной добычи, выполненной в соответствии с настоящим изобретением;
Фиг.32 схематически представляет вариант выполнения надводного электрического оборудования системы подводной добычи, показанной на Фиг.31;
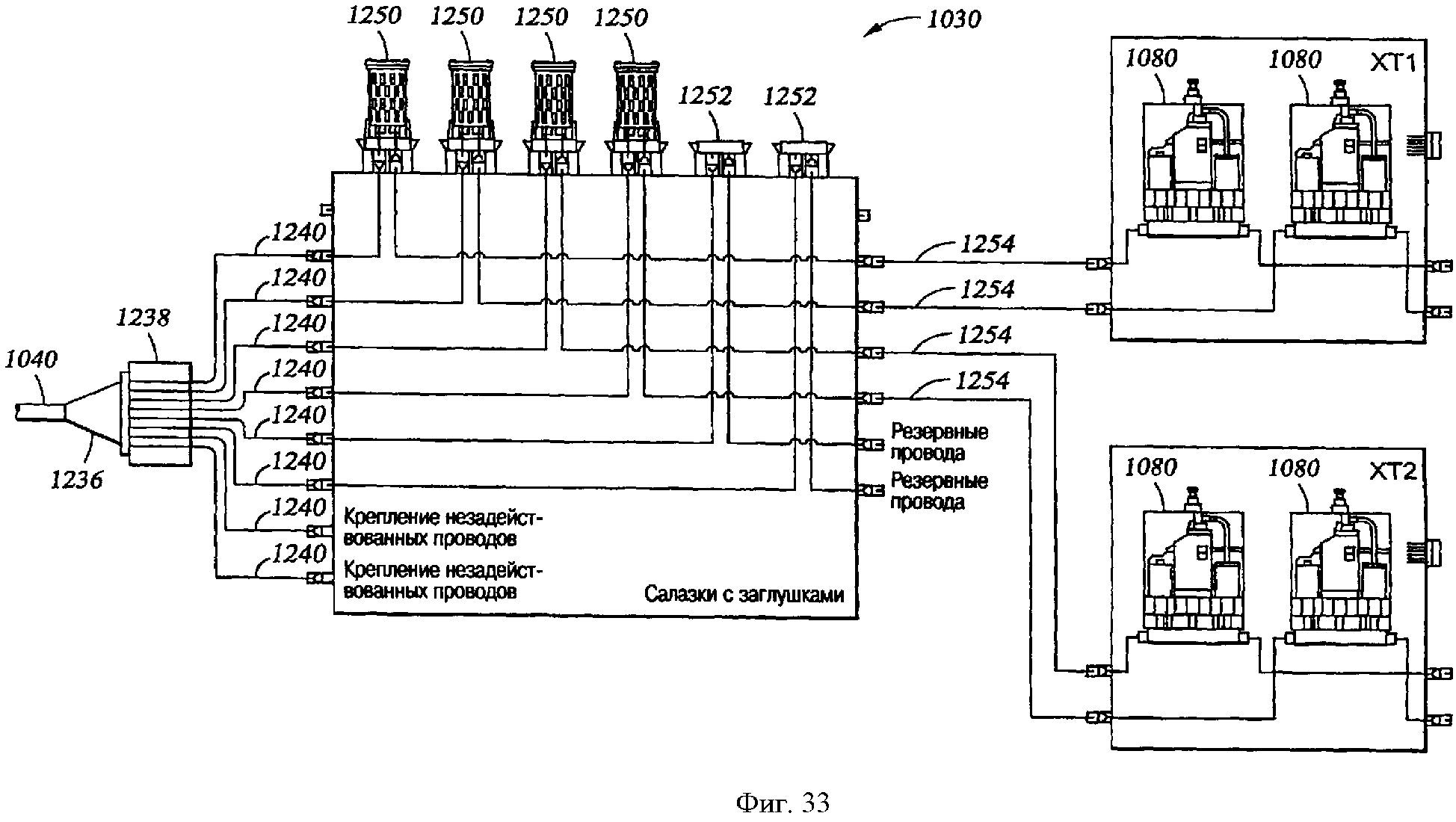
Фиг.33 схематически представляет вариант выполнения подводного электрического оборудования системы подводной добычи, показанной на Фиг.31; и
Фиг.34 схематически представляет вариант выполнения подводного оборудования управления потоком системы подводной добычи, показанной на Фиг.31.
Осуществление изобретения
Настоящее изобретение относится к способам, узлам и системам, используемым в электроснабжении и управлении удаленных электрических устройств, в частности при добыче нефти и газа. Настоящее изобретение может быть выполнено в различных формах. Имеется в виду, что приведенные в настоящем раскрытии чертежи и подробное описание конкретных вариантов выполнения настоящего изобретения предназначены для иллюстрации принципов изобретения и не могут ограничивать изобретение показанными и описанными здесь примерами.
В частности, различные варианты выполнения настоящего изобретения представляют ряд различных конструкций и способов работы электрической системы управления и питания, каждый из которых может быть использован при бурении и окончания бурения скважины, ведения добычи и ремонте нефтяной и газовой скважины. Варианты выполнения настоящего изобретения также представляют ряд способов использования электрической системы управления и питания в соответствии с настоящим изобретением. Следует отчетливо представлять, что различные описания приведенных ниже вариантов выполнения могут быть использованы независимо либо в любой подходящей комбинации для получения требуемых результатов. Описанные ниже исполнительные элементы с электрическим приводом могут быть использованы вместо любых исполнительных элементов с гидравлическим приводом, применяемых в оборудовании разведки и добычи нефти и газа. В приведенном ниже описании одинаковые элементы по всему описанию и на всех чертежах имеют, соответственно, одинаковые цифровые обозначения. Изображения на чертежах могут быть выполнены без соблюдения масштаба. Некоторые признаки изобретения могут быть представлены в преувеличенном масштабе или в схематическом виде, а некоторые детали обычных элементов могут быть не показаны для ясности или краткости изложения.
Один вариант выполнения электрических систем 20 управления и питания может быть создан в соответствии с патентной заявкой США Сер. №10/415510, поданной 29 апреля 2003 г., под названием "Система управления и питания", которая претендует на привилегии Заявки РСТ РСТ/ЕР01/12547, поданной 31 октября 2001 г., которая претендует на приоритет заявки DE 200 18 560.8, поданной 30 октября 2000 г. (1600-08400; ОТЕ-030339), каждая из которых полностью включена в настоящее описание.
Вначале рассмотрим Фиг.1(С), где изображена электрическая система 20 управления и питания, включающая электрический узел 30 питания и управления в первом пункте 42, кабель 44, проходящий ко второму удаленному пункту 50 и соединяющий электрический узел 30 питания и управления с управляющим и исполнительным узлом 40, связанным с удаленным узлом 25 на удаленном пункте 50. В отличие от известных систем, электрическая система 20 управления и питания, вместо переменного напряжения, передает постоянное напряжение по кабелю 44 к управляющему и исполнительному узлу 40. Управляющий и исполнительный узел 40 соединен посредством соединительных линий 26 с соответствующими электрическими устройствами 46 или электрическими блоками 24 на удаленном узле 25. Электрический блок 24 может быть образован группой электрических устройств 46, например исполнительных устройств, датчиков и систем управления, расположенных подводой, как это будет описано ниже. Электрическое устройство 30 питания и управления в первом пункте 42 включает, по крайней мере, один преобразователь 48 переменного напряжения в постоянное напряжение, который преобразует подходящее переменное напряжение от источника 32 переменного напряжения в постоянное напряжение. В удаленном пункте 50 управляющего и исполнительного устройства 40 преобразователь 34 постоянного напряжения в постоянное напряжение или постоянного напряжения в переменное напряжение используется аналогичным образом для преобразования постоянного напряжения в постоянное или переменное напряжение согласно требованиям электрических устройств 46 или электрических блоков 24. В предпочтительном варианте выполнения, преобразователь 34 представляет собой преобразователь постоянного напряжения в постоянное напряжение для питания постоянным напряжением удаленного узла 25.
Простой источник напряжения для системы 20, который также может быть использован для других применений, может быть таким образом, что источник 32 переменного напряжения соединяется с узлом 30 питания и управления, для получения, в предпочтительном варианте, трехфазного переменного напряжения.
При использовании преобразователя 34 в качестве преобразователя постоянного напряжения в постоянное напряжение, преобразование высокого постоянного напряжения, передаваемого по кабелю 44, происходит, соответственно, в постоянные напряжения, требующиеся для питания соответствующих устройств удаленного узла 25 в удаленном пункте 50. Здесь следует отметить, что при подаче постоянного напряжения от первого пункта 42 к устройствам 46, 24 удаленного узла 25 на удаленном пункте 50, упрощается обмен данными с этими устройствами, поскольку соответствующие сигналы данных могут быть достаточно просто переданы модуляцией сигнала постоянного напряжения.
Благодаря преобразователю 34 постоянного напряжения в постоянное напряжение или постоянного напряжения в переменное напряжение, расположенному в удаленном пункте 50 в управляющем и исполнительном устройстве 40, производится преобразование постоянного напряжения в постоянное или переменное напряжение требуемых величин, например, 240 В или 300 В соответствующей частоты, для электрических устройств 46, например двигателей, исполнительных устройств и аналогичного оборудования узла 25.
Электрическая система 20 управления и питания позволяет передавать постоянное напряжение по длинному подводному кабелю 44, при этом преобразование переменного напряжения в постоянное напряжение или, наоборот, из постоянного напряжения в переменное напряжение производится только на концах кабеля 44. При использовании постоянного напряжения и, соответственно, постоянного тока по кабелю 44 передается только активная мощность, а не кажущаяся мощность. Это означает, что коэффициент мощности равен 1. Благодаря тому, что по кабелю передается постоянное напряжение, даже в случае высоких напряжений, имеются только незначительные потери по сравнению с передачей переменного напряжения в известных системах.
Кроме того, при передаче постоянного напряжения, для кабеля 44 требуются проводники с малым сечением, составляющим одну десятую долю или даже меньше сечения, необходимого для передачи переменного напряжения.
Поскольку согласно изобретению по кабелю 44 передается постоянное напряжение, то не происходит передачи высокочастотных напряжений, поэтому сигналы для данных могут достаточно просто передаваться модуляцией постоянного напряжения. Передача данных может осуществляться через устройство 52 уплотнения и соответствующий кабельный соединитель 54. Устройство 52 уплотнения может подключать различные информационные каналы к кабельному соединителю 54. Например, каждый информационный канал может быть связан с компьютером отдельного пользователя. Поэтому пользователи различных компьютеров могут передавать команды, данные и пр. в управляющий и исполнительный узел 40 через устройство 52 уплотнения. Демодуляция данных производится соответствующим образом в удаленной зоне 50 в управляющем и исполнительном узле 40.
Электрическая система 20 управления и питания может быть использована, например, при бурении, окончании бурения, при добыче и ремонте нефтяных и газовых скважин, и может быть использована на наземных или морских скважинах. Электрическая система дает особенно заметные преимущества, когда узел устья скважины удален от источника электроснабжения 32, например, когда узел устья скважины находится во многих километрах от источника 32 энергоснабжения. Особенно выгодно использование электрической системы 20 управления и питания в случае морской скважины из-за более жестких условий работы на морском дне. Хотя приведенные ниже примеры вариантов выполнения описаны применительно к морской скважине, следует иметь ввиду, что электрическая система управления и питания в соответствии с настоящим изобретением также может быть использована в наземной скважине. По крайней мере, один вариант выполнения электрической системы 20 управления и питания и управляющего и исполнительного узла 40, описанный ниже, относится к системе подводной добычи.
На Фиг.36 показана система 3000 подводной добычи в соответствии с вариантами выполнения настоящего изобретения. Система 3000 подводной добычи выполнена таким образом, что обеспечивает управляемую добычу материалов, например газа и нефти с морского дна. В силу расположения морских платформ и системы 3000 подводной добычи, надежность особенно важна. Стоимость простоя системы 3000 подводной добычи составляет значительные суммы (до миллионов долларов) за время службы системы 3000. Как показано здесь, конструкция системы 3000 подводной добычи должна обеспечивать высокую надежность, которая позволяет работать системе 3000 подводной добычи на большой глубине и больших удалениях. По крайней мере, в некоторых вариантах выполнения, система 3000 подводной добычи содержит клапан 3002 эксплуатационной задвижки с электрическим приводом и заслонку 3006 с электрическим приводом. Система 3000 подводной добычи также содержит клапан 3004 затрубной задвижки с электрическим приводом и химический инжекционный клапан 3008 с электрическим приводом. Система 3000 подводной добычи также содержит электрический подводный модуль 3010 управления и модуль 3012 регулировки и связи. По крайней мере, в некоторых вариантах выполнения, компоненты системы 3000 подводной добычи соответствуют управляющему и исполнительному узлу 40, представленному на Фиг.1(С).
Клапан 3002 эксплуатационной задвижки с электрическим приводом открывается и закрывается, обеспечивая управляемое прохождение газа или жидкости через систему 3000 подводной добычи. Кроме того, заслонка 3006 с электрическим приводом управляет расходом газа или жидкости через систему 3000 подводной добычи посредством регулирования потока через заслонку. Клапан 3004 затрубной задвижки с электрическим приводом открывается и закрывается, обеспечивая прохождение газа или жидкости через затрубное пространство в системе 3000 подводной добычи. Химический инжекционный клапан 3008 с электрическим приводом открывается и закрывается, обеспечивая инжекцию химических препаратов в пласт под системой 3000 подводной добычи.
Электрический подводный модуль 3010 управления служит в качестве промежуточного звена между электрическими компонентами и компонентами связи, например модемами, системы 3000 подводной добычи. Например, электрический подводный модуль 3010 управления может получать команды с поверхности через модуль 3012 регулировки мощности и связи (например, может быть использован протокол Ethernet для связи между электрическим подводным модулем 3010 управления и другими компонентами системы 3000 подводной добычи). Электрический подводный модуль 3010 управления может использовать одну или более схемных плат, для осуществления функций управления для двигателей и других электрических устройств. Схемные платы могут содержать процессор, который получает данные (например, данные о мощности, поступающей с поверхности) и управляет двигателями и другими электрическими устройствами. По крайней мере, в некоторых вариантах выполнения, электрический подводный модуль 3010 управления использует твердотельные устройства и не имеет движущихся компонентов, например соленоидов. Электрический подводный модуль 3010 управления также может осуществлять мониторинг данных датчика и передавать данные датчика на поверхность. Это может быть сделано по запросу с поверхности и/или в заранее определенном порядке. Электрический подводный модуль 3010 управления также может передавать команды на поверхность. Например, электрический подводный модуль 3010 управления может послать запрос на увеличение или уменьшение мощности, подаваемой с поверхности (например, на основе данных о нагрузке, полученных от двигателей и других электрических устройств). Электрический подводный модуль 3010 управления также может производить опрос датчиков и хранить данные датчиков, которые могут периодически передаваться на поверхность.
Модуль 3012 регулировки мощности и связи регулирует мощность, подаваемую по кабелю 3200 к электрическим компонентам системы 3000 подводной добычи. По крайней мере, в некоторых вариантах выполнения, модуль 3012 регулировки мощности и связи потребляет незначительную мощность с поверхности для питания электронных компонентов (например, электрического подводного модуля 3010 управления), которые работают, даже если клапаны и заслонка не работают. В ответ на команду или запрос на включение клапана или заслонки, модуль 3012 регулировки мощности и связи линейно повышает мощность, подаваемую из кабеля. Модуль 3012 регулировки мощности и связи работает скоординировано с электрическим подводным модулем 3010 управления для подачи мощности на исполнительные механизмы (например, двигатели) таким образом, чтобы обеспечить необходимую стабильность мощности.
Для подачи электроэнергии в систему 3000 подводной добычи, в надводном месте 3024 расположения используется преобразователь 3022 переменного напряжения в постоянное напряжение. Например, преобразователь 3022 переменного напряжения в постоянное напряжение может быть установлен на платформе 3020. Преобразователь 3022 переменного напряжения в постоянное напряжение использует несколько компонентов 3026 преобразователя переменного напряжения в постоянное напряжение, которые преобразуют часть мощности 3028 переменного напряжения в постоянное напряжение 3016. В, по крайней мере, некоторых вариантах выполнения, компоненты платформы 3020 могут быть представлены системой 20 управления и питания. Полное постоянное напряжение 3016 (например, от 3000 В до 6000 В), преобразованное компонентами 3026 преобразователя переменного напряжения в постоянное напряжение, передается по кабелю 3014 на систему 3000 подводной добычи. По крайней мере, в некоторых вариантах выполнения, кабель 3014 содержит коаксиальный кабель 3200. Как показано на Фиг.35, коаксиальный кабель 3200 может использовать внутри внутреннего проводника 3208 коаксиального кабеля 3200 волоконно-оптические кабели 3210. Волоконно-оптические кабели 3210 обеспечивают передачу данных (например, команды и данные с датчиков) с высокой скоростью, даже и тогда, когда система 3000 подводной добычи находится далеко от надводного места 3024 расположения (например, 120 миль или более). Коаксиальный кабель 3200 также содержит наружный проводник 3204, отделенный от внутреннего проводника 3208 диэлектриком или иным изолятором 3606. Коаксиальный кабель 3200 также содержит наружную кожуху 3202. Кабель 3014 также может образовать один или более трубопроводов, по которым передаются химические препараты на систему 3000 подводной добычи (например, химические препараты для обработки пластов).
В, по крайней мере, одном варианте выполнения модуль 3012 регулировки мощности и связи может использовать преобразователь постоянного напряжения в постоянное напряжение или постоянного напряжения в переменное напряжение для преобразования постоянного напряжения из кабеля в соответствующие напряжения. Преобразователь постоянного напряжения в постоянное напряжение или постоянного напряжения в переменное напряжение содержит несколько компонентов преобразователя, которые преобразуют часть полного постоянного напряжения в напряжения более низкого уровня для использования электрическими компонентами (например, клапаны 3002, 3004 и 3008 с электрическим приводом, заслонка 3006 с электрическим приводом, компоненты модуля 3012 регулировки мощности и связи, и электрический подводный модуль 3010 управления) системы 3000 подводной добычи.
Когда система 3000 подводной добычи размещена в заданном местоположении (например, на морском дне), надежная работа системы 3000 подводной добычи зависит от нескольких факторов. Во-первых, системе 3000 подводной добычи необходим надежный источник энергии. Варианты выполнения изобретения передают мощность постоянного напряжения (например, постоянное напряжение 3016) по кабелю 3014 даже при том, что вероятность воздействия влаги на передачу постоянного напряжения больше, чем переменного напряжения. Некоторые из преимуществ передачи под водой постоянного напряжения вместо переменного, включают меньшее затухание, более тонкий проводник и упрощение передачи данных. Таким образом, особое значение использования вариантов выполнения изобретения обусловлено созданием дешевых и надежных систем подводной добычи, которые могут быть расположены на больших глубинах и больших расстояниях от платформы 3024 на поверхности, с которой осуществляется энергоснабжение, чем в традиционных системах подводной добычи (например, показанных на Фиг.1А и 1В). Использование компонентов с электрическим приводом, на основе передачи напряжения постоянного тока, также потенциально дает преимущества в отношении безопасности для природы и людей, а также надежности и стоимости, по сравнению с компонентами, имеющими гидравлический привод. Например, если система подводной добычи, в компонентах которой используются гидравлические исполнительные элементы, установлена глубже или дальше от платформы на поверхности, увеличивается давление, необходимое для работы гидравлики. Это вызывает повышенный износ гидравлических компонентов, а также повышает вероятность утечек из гидравлики. Надежность системы 3000 подводной добычи, напротив, не зависит в большой мере от того, расположена ли система 3000 подводной добычи глубже или дальше от пункта 3024 энергоснабжения, расположенного на поверхности.
В, по крайней мере, некоторых вариантах выполнения компоненты с электрическим приводом (например, клапан 3002 эксплуатационной задвижки, заслонка 3006, клапан 3004 затрубной задвижки и химический инжекционный клапан 3008) находятся под наблюдением по монитору 3030 (то есть компьютеру), на платформе на поверхности и/или посредством подводного модуля 3010 управления. Благодаря исключению гидравлики временная задержка (например, для зарядки аккумуляторов), связанная с открыванием и закрыванием заслонки и клапанов, уменьшается. Кроме того, значительно возрастает точность управления (по сравнению с гидравлическими приводами) благодаря скорости измерения параметров и передачи электрических команд.
В примере, иллюстрирующем работу системы 3000 подводной добычи, оператор может использовать монитор 3030 для получения данных датчика, которые показывают, что давление текучих сред или количество текучей среды, проходящей по системе 3000 подводной добычи, уменьшилось. В ответ на это, оператор может ввести команду увеличить отверстие в электрически управляемой заслонке 3006. Либо, например, подводный модуль 3010 управления может получить данные датчика, которые показывают давление текучих сред, и передать в ответ запрос на находящуюся на поверхности платформу 3024 энергоснабжения. Команда (или запрос) заставляет преобразователь 3022 переменного напряжения в постоянное напряжение на платформе 3024 на поверхности преобразовать некоторое количество энергии 3028 переменного напряжения в постоянное напряжение 3016, которое передается по кабелю 3014 на систему 3000 подводной добычи. В, по крайней мере, некоторых вариантах выполнения процессор на поверхности получает команду (или запрос) и определяет количество мощности, которая должна быть передана под воду, на основе нескольких факторов, например, длины кабеля и мощности потребления заслонки с электрическим приводом. Модуль 3012 регулировки мощности системы 3000 подводной добычи преобразует постоянное напряжение 3016 из кабеля 3014 в соответствующее напряжение для электрически управляемой заслонки 3006. Электрический подводный модуль 3010 управления может вести наблюдение за работой заслонки 3006 с электрическим приводом (например, путем мониторинга данных о нагрузке двигателей, используемых заслонкой 3006 с электрическим приводом). Например, если заслонке 3006 с электрическим приводом требуется для работы большая мощность, подводный модуль 3010 управления дает команду модулю 3012 регулировки мощности увеличить подачу мощности. Если мощности не хватает, подводный модуль 3010 управления дает команду преобразователю 3022 переменного напряжения в постоянное напряжение, расположенному на пункте 3024 на поверхности, подать больше мощности постоянного напряжения по кабелю 3014. Запрос может быть сгенерирован в подводном модуле 3010 управления и передан через компоненты модуля 3012 регулирования мощности и связи. Запрос может быть передан, например, по коаксиальному кабелю 3200. Специальные волоконно-оптические кабели 3210 могут передавать данные между пунктом 3024 на поверхности и системой 3000 подводной добычи. Кроме того, данные могут передаваться по проводникам 3024 и 3028 коаксиального кабеля 3200. Когда поток, пропускаемый заслонкой 3006 с электрическим приводом, увеличится, давление текучих сред, проходящих по системе 3000 подводной добычи, увеличивается. Оператор на пункте 3024 на поверхности либо подводный модуль 3010 управления могут следить за давлением (например, используя данные датчика) пока не будет достигнуто требуемое давление. Затем оператор либо подводный модуль 3010 управления дает команду остановки на заслонку 3006 с электрическим приводом. Оператор либо подводный модуль 3010 управления также может дать команду преобразователю 3022 переменного напряжения в постоянное напряжение, расположенному на пункте 3024 на поверхности, остановить преобразование мощности 3028 переменного тока. Таким образом обеспечивается контроль использования мощности и преобразования мощности, и эффективность этих процессов. Любая лишняя мощность, которая преобразуется преобразователем 3022 переменного напряжения в постоянное напряжение, рассеивается модулем 3012 регулировки мощности и связи. Таким образом, модуль 3012 регулировки мощности и связи, электрический подводный модуль 3010 управления и процессор на поверхности координируют подачу мощности на дно и управляют ее величиной, а также рассеянием излишней мощности.
В, по крайней мере, некоторых вариантах выполнения электрические компоненты и/или электромеханические компоненты системы 3000 подводной добычи могут резервироваться. Таким путем повышается надежность системы 3000 подводной добычи. Кроме того, в по крайней мере некоторых вариантах выполнения система подводной добычи не зависит от гидравлики, батарей и аккумуляторов.
На Фиг.2 представлен другой вариант выполнения электрической системы 60 управления и питания для подводной скважины, в соответствии с изобретением. Электрическая система 60 управления и питания включает электрический узел 70 питания и управления, установленный на платформе или судне 62 на морской поверхности 64, и управляющий и исполнительный узел 64, например, на морском дне 66. Эти узлы соединены подводным кабелем 68. Электрический узел 70 питания и управления подключен к источнику 78 переменного напряжения, который, в предпочтительном варианте выполнения, дает переменное трехфазное напряжение.
Электрический узел 70 питания и управления содержит, по крайней мере, один преобразователь 72 переменного напряжения в переменное напряжение и устройство 74 модуляции данных. Кроме этого электрический узел 70 питания и управления соединен с устройством 82 передачи данных, которое может быть удалено от электрического узла 70 питания и управления, но которое входит, тем не менее, в состав системы 70 управления и питания. Управление всей системой 60 и мониторинг ее работы может осуществляться через устройство 82 передачи данных.
Стрелки, изображенные между различными узлами в системе 60, показывают направление передачи напряжения или данных, хотя обычно возможна и двухсторонняя передача данных.
Управляющий и исполнительный узел 80 расположен ниже морской поверхности 64, например, на морском дне 66. Узел содержит устройство 84 модуляции данных для демодуляции данных, передаваемых по подводному кабелю 68, но также и для модуляции напряжения, передаваемого по подводному кабелю 68, соответствующими данными, когда такие данные передаются в обратном направлении от управляющего и исполнительного узла 80 к узлу 70 питания и управления.
Помимо устройства 84 модуляции данных управляющий и исполнительный узел 80 содержит преобразователь 86 напряжения. Например, преобразователь 86 напряжения может содержать преобразователь постоянного напряжения в постоянное напряжение или преобразователь постоянного напряжения в переменное напряжение. С использованием преобразователя 86 напряжения постоянное напряжение, передаваемое по подземному кабелю 68, преобразуется в подходящее постоянное или переменное напряжение. Для того чтобы предотвратить возникновение больших токов и, где это возможно, повреждения соответствующих электрических устройств, особенно на дне моря, к преобразователю напряжения может быть подключено устройство защиты от перегрузки по току.
Вслед за преобразованием постоянного напряжения в нужное напряжение производится индуктивная передача нужного напряжения к устройству 90 измерения напряжения. Индуктивная передача производится посредством трансформатора 92, состоящего из двух сердечников 94, 96 с обмотками. В, по крайней мере, некоторых вариантах выполнения сердечники 94, 96 обмотки могут быть сердечниками с полуобмотками. Между сердечниками 94, 96 обмотки образован воздушный зазор 98.
Для обмена данными используются устройства 108, 110 управления сопряжением. Например, устройство 110 управления сопряжением может обеспечить связь устройства 90 измерения напряжения с подводным электронным модулем 112. Электронный модуль 112 может содержать электронику для управления различными частями оборудования под водой и, в частности, на морском дне, например, клапанами, противовыбросовыми устройствами, исполнительными устройствами и аналогичным оборудованием. В целом, соответствующая электроника содержится в электронном модуле с резервированием.
Устройство 90 измерения напряжения может измерять амплитуду требуемого напряжения. В некоторых вариантах выполнения, в устройстве 90 измерения напряжения может использоваться шунтовой регулятор 100 напряжения. Шунтовой регулятор 100 напряжения обеспечивает соответствующую статическую и/или динамическую стабилизацию требуемого напряжения. Для того чтобы передать данные в направлении узла 70 питания и управления непосредственно от электрических устройств 46, 24, устройства 90 измерения напряжения и шунтовой регулятор 100 напряжения могут быть двунаправленными.
При использовании шунтового регулятора 100 напряжения система 80 может, например, работать при полном напряжении перед приведением в действие электрических устройств 46, 24, когда шунтовой регулятор 100 напряжения производит регулировку динамической нагрузки и, в результате, может снизить напряжение до требуемой пониженной величины.
Стабилизированное на требуемом уровне напряжение затем может быть подано на подводный источник 102 напряжения, к которому по электрическим соединительным линиям 26 подключены различные электрические устройства 46 или блоки 24.
Посредством использования обычных электрических соединителей также возможно все подсоединенные части найти и поднять из-под воды для, например, их обслуживания и дальнейшего использования впоследствии. В соответствии с вариантами выполнения настоящего изобретения могут использоваться непостоянные (то есть разъемные) соединения между, например, подводным кабелем и подводными устройствами.
Управляющий и исполнительный узел 80 использует для работы постоянное напряжение, передаваемое по подводному кабелю 68. Постоянное напряжение преобразуется либо в более низкое постоянное напряжение, либо в переменное напряжение соответствующим преобразователем 86 на морском дне 66, только после того, как постоянное напряжение было передано по длинному подземному кабелю 68. Над поверхностью 64 моря производится преобразование трехфазного переменного напряжения преобразователем 72 переменного напряжения в постоянное напряжение в, например, выходное напряжение величиной от 3000 до 6000 В. Величина напряжения зависит от мощности потребления системы 60.
Далее, постоянное напряжение передается по коаксиальным проводникам в подводном кабеле 68. Кроме того, постоянное напряжение может быть промодулировано посредством подходящего устройства 74 модуляции для передачи данных, например модема или аналогичного устройства. Поскольку коаксиальные проводники обладают оптимальными характеристиками в отношении потерь и воздействия электрических помех, возможна скорость передачи данных от 100 до 600 кБод. Варианты выполнения изобретения, однако, не ограничены использованием только коаксиальных проводников, и могут быть использованы другие существующие проводники либо те, что появятся в будущем.
На морском дне 66, или ниже уровня 64 моря производится демодуляция сигналов данных посредством подходящего устройства 84 модуляции для передачи данных, например, модема. Далее, преобразователем 86 производится преобразование постоянного напряжения в, например, переменное напряжение, имеющее форму "меандр", величиной 300 В, частотой 20 кГц. Это напряжение передается на различные электрические устройства 46, 24. При этом требуется незначительная фильтрация без применения электролитических конденсаторов большой емкости. Трансформатором 92 производится преобразование напряжения с выхода преобразователя 86 в напряжение требуемого уровня, с использованием двух сердечников 94, 96 с обмоткой, разделенных воздушным зазором 98. Сердечники 94, 96 прикреплены друг к другу, могут отделяться друг от друга, и могут быть выполнены взаимно симметричными. Трансформатор 92 обеспечивает индуктивную связь.
Трансформатор 92 может быть выполнен так, что воздушный зазор 98 между двумя сердечниками 94, 96 измеряется миллиметрами (например, от 1 до 5 мм). Кроме того, для сердечников 94, 96 с обмоткой могут быть использованы соответствующие материалы, не подверженные воздействию морской воды 114, например материалы сердечника обмотки в виде пакетов коррозионно-стойкой листовой трансформаторной стали, или смеси магнитных порошков в пластиковой оболочке.
Для того чтобы ввести данные в управляющий и исполнительный узел 80 или вывести данные из узла, устройство модуляции 84 для передачи данных управляющего и исполнительного узла 80 может быть установлено до преобразователя 86 напряжения. Поэтому данные могут вводиться в постоянное напряжение или выводиться из него. В, по крайней мере, некоторых вариантах выполнения, данные могут передаваться от устройства 90 измерения напряжения через устройства 106 и 104 передачи данных, и далее через устройство модуляции 84 передачи данных к устройству 70 питания и управления напряжением для регулировки напряжения питания. Используя соответствующие расчеты для требуемых значений напряжения и мощности, можно получить площадь сечения проводника приблизительно 2 мм2 для, например, длины подводного кабеля, равной 50 км, при использовании системы 60 питания и управления напряжением в соответствии с изобретением. Эта площадь сечения значительно меньше той, что присуща существующим системам.
Кроме того, возможно достижение высоких скоростей передачи данных благодаря простоте модуляции и демодуляции благодаря использованию постоянного напряжения и коаксиального кабеля. Посредством устройств, используемых в системе 60, в соответствии с изобретением, достигается стабильность питающего напряжения и высокая надежность системы. В простом варианте выполнения, без использования дополнительных устройств управления, устройство 90 измерения напряжения может подсоединяться к электрическим устройствам 46, 24 для их питания.
Специальный стабилизатор напряжения, например, использующий схему со стабилитроном 240 (как на Фиг.6-8),оказывается больше не нужным благодаря наличию устройства 90 измерения напряжения с шунтовым регулятором 100 напряжения в соответствии с изобретением, поскольку полученное напряжение уже статически и динамически стабилизировано. Для передачи постоянного напряжения, а также электрических сигналов по подводному кабелю 68, кабель желательно выполнить в форме коаксиальных проводников. Они обладают оптимальными свойствами в отношении потерь и восприимчивости к электромагнитной помехе, и обеспечивают высокие скорости передачи информации, по крайней мере от 100 до 600 кБод. Кроме того, без труда обеспечивается двухсторонняя передача данных вдоль подводного кабеля 68.
Благодаря использованию, в соответствии с изобретением, постоянного напряжения или постоянного тока, и, в результате этого, уменьшенной площади сечения проводников в подводном кабеле 68, существует также возможность того, что для каждого электрического устройства 46, 24 в подводном кабеле 68 может быть выделен отдельный соединительный провод. Здесь следует отметить, что электрический блок 24, например, отдельный двигатель или отдельный привод, также может быть и сложным устройством или группой электрических двигателей, исполнительных устройств или иных электрических устройств.
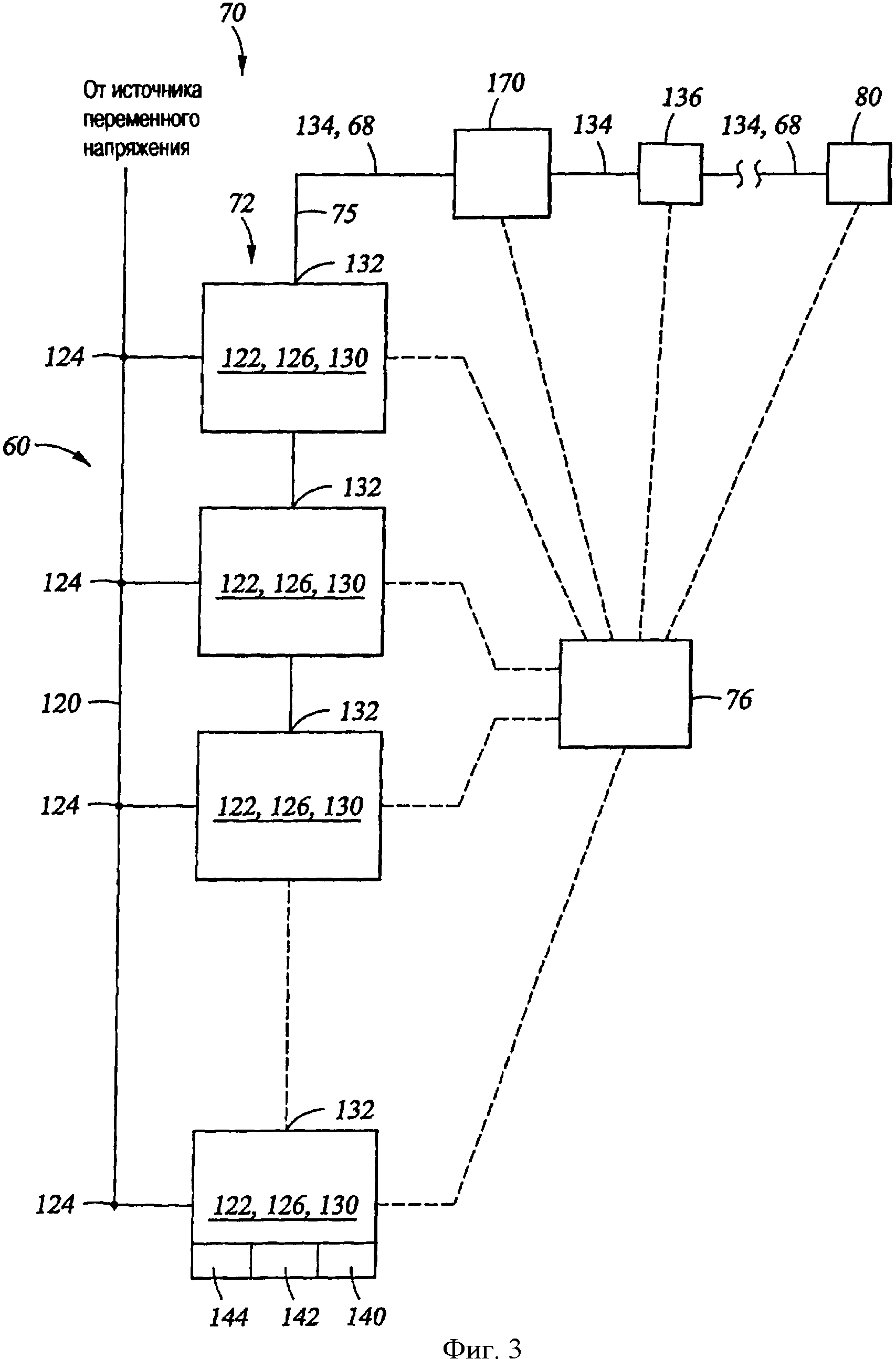
Соответственно, простое подсоединение передаваемых данных, в том числе и многоканальных, может быть осуществлено в системе 60 благодаря наличию в ней мультиплексора 82 для передачи данных. Мультиплексор 82 может подключать различные каналы передачи данных к контроллеру 76. Например, каждый канал передачи данных может быть связан с отдельным компьютером со своим пользователем. Таким образом, пользователи различных компьютеров могут передавать команды, данные и пр., на управляющий и исполнительный узел 80 посредством мультиплексора 82. На Фиг.3 схематически изображен узел 70 электропитания и управления, раскрытый в патентной заявке США Серийный №10/489,573, поданной 12 марта 2004 г. под названием "Универсальная Система Электроснабжения", которая претендует на привилегии заявки РСТ/ЕР02/10471, поданной 18 сентября 2002 г., которая претендует на приоритет заявки DE 201 15 471.9, поданной 19 сентября 2001 г. (1600-09300; ОТЕ-030452); и патентной заявке США Серийный №10/489, 583, поданной 12 марта 2004 г. под названием "Универсальная Система Электроснабжения", которая претендует на привилегии заявки РСТ/ЕР02/10468, поданной 18 сентября 2002 г., которая претендует на приоритет заявки DE 20115473.0, поданной 19 сентября 2001 г. (1600-09500; ОТЕ-030454). Все эти заявки полностью включены в настоящее описание посредством ссылки. На узел 70 электропитания и управления подается мощность переменного напряжения от источника 78 переменного напряжения (см. Фиг.2). Источник мощности переменного напряжения может содержать трехфазный источник мощности переменного напряжения 380 В. Показано, что узел 70 электропитания и управления может содержать преобразователь 72 переменного напряжения в постоянное напряжение, содержащий несколько компонентов 122 преобразователя переменного напряжения в постоянное напряжение, которые подключены параллельно линии 120 через соответствующие входные контакты 124.
Благодаря такому способу соединения компонентов 122 преобразователя переменного напряжения в постоянное напряжение каждый из этих компонентов 122 используется для создания только определенной части напряжения на выходе преобразователя 72 переменного напряжения в постоянное напряжение. Если постоянное напряжение, которое должно быть на выходе 75, составляет, например, 6000 В, это постоянное напряжение может вырабатываться, например, 20 компонентами 122 преобразователя, каждый из которых имеет выходное напряжение 300 В. Также возможно использовать 30, 40 или 50 компонентов 122 конвертера, которые обеспечивают соответствующую часть постоянного напряжения, которое требуется на выходе 75.
В простейшем случае, компоненты 122 преобразователя имеют однотипную конструкцию, поэтому, в случае использования n компонентов 122 преобразователя, каждый компонент 122 преобразователя вырабатывает из подаваемого на вход переменного напряжения n-ную часть требуемого выходного напряжения.
Благодаря использованию нескольких или большого числа узлов 122 преобразования из переменного напряжения в постоянное напряжение, каждый отдельный узел 122 преобразования отвечает за выработку только определенного напряжения из общего напряжения, которое необходимо иметь на выходе. Если все узлы 122 преобразования имеют аналогичную конструкцию, каждый отдельный узел преобразования вырабатывает, например, только n-ную часть требуемого выходного напряжения.
Компоненты 122 преобразователя переменного напряжения в постоянное напряжение могут содержать импульсные источники 126 электропитания и, в частности, преобразователи 130 с обратной связью, тактируемые на входе и действующие как импульсные источники 126 электропитания.
На выходе 75, различные компоненты 122 конвертера соединены последовательно друг с другом посредством соответствующих выходных контактов 132 и подключены к кабелю 68 и соединительным линиям 134. Посредством соединительных линий 134 подводится электропитание к управляющему и исполнительному узлу 80 в удаленном пункте. Между преобразователем 72 переменного напряжения в постоянное узла 70 питания и управления, и управляющим и исполнительным узлом 80 к кабелю 68 и соединительным линиям дополнительно подключены средства 136 ввода/вывода сигналов данных. Средства 136 для ввода/вывода сигналов данных используются для передачи соответствующих сигналов данных или для вывода сигналов данных, которые были получены от управляющего и исполнительного узла 80, либо от связанных с ним блоков. Передача сигналов данных также обеспечивается через соединительные линии 134 и кабель 68. На Фиг.3 показан только один управляющий и исполнительный узел 80. Обычно электропитание и также данные подаются к нескольким управляющим и соединительным узлам 80 по соединительным линиям 134 и кабелю 68 от узла 70 питания и управления, в соответствии с настоящим изобретением. Такие управляющие и исполнительные узлы 80 включают электрические устройства 46 (описанные выше), например, расположенные на местах проведения работ исполнительные механизмы, которые находятся далеко и/или труднодоступны. Исполнительные механизмы управляют, например, узлами линий передачи текучей среды, например клапанами, отключающими устройствами, ограничителями, насосами и т.п., таким образом, что производится управление потоком текучей среды в линию и по линии, и его отключение при необходимости, например, в случае утечки, разрывов линии и т.п., а также мониторинг и управление параметрами текучей среды, потока текучей среды и соответствующих узлов. Текучая среда обычно подается в линию под высоким давлением от соответствующего источника текучей среды и проходит вдоль таких линий, например, со дна моря на поверхность. Поскольку такая текучая среда обычно содержит агрессивные или вредные для окружающей среды компоненты, выполнение электроснабжения и дистанционного управления посредством системы энергоснабжения в соответствии с настоящим изобретением представляется особенно важным. Дистанционное управление соответствующими исполнительными механизмами может при этом осуществляться через линию связи, созданную с помощью средств 136 для ввода/вывода сигналов.
Все блоки узла 70 питания и управления, включая, при необходимости, управляющий и исполнительный узел 80, приспособлены для управления и/или регулировки посредством контроллера 76. Кроме того, может осуществляться соответствующий мониторинг параметров различных блоков. На Фиг.3 контроллер 76 соединен с различными блоками соединительными линиями, показанными штриховыми линиями, для осуществления управления, регулировки или мониторинга упомянутых блоков.
Импульсные источники 126 электропитания и преобразователи 130 с обратной связью могут, соответственно, быть выполнены в виде интегральных схем. Эти интегральные схемы непосредственно содержат следующие компоненты, например, средства 140 управления коэффициентом мощности, средства 142 определения пониженного напряжения или средства 144 отслеживания повышенного напряжения. Для упрощения пояснений эти дополнительные средства показаны на Фиг.3 только для одного компонента 122 преобразователя переменного напряжения в постоянное напряжение; обычно они являются составными частями всех компонентов 122 преобразователя переменного напряжения в постоянное напряжение.
На Фиг.4 представлен в упрощенном виде вариант выполнения преобразователя 130 с обратной связью, работающий как импульсный источник электропитания. Преобразователь 130 с обратной связью содержит трансформатор 92, первичная обмотка которого подсоединена к входному выводу 124, а вторичная обмотка подсоединена к выходному выводу 132. Между этими двумя обмотками существует сильная магнитная связь. Трансформатор 92 действует как аккумулятор магнитной энергии. Когда коммутриующие средства 150 в форме силового транзистора 152 замкнуты, ток в первичной обмотке нарастает и энергия запасается в трансформаторе 92. Когда коммутирующие средства 150 разомкнуты, запасенная энергия со стороны вторичной обмотки передается в сглаживающий конденсатор 154 через диод 156. Запасенная энергия выводится, таким образом, через выходной вывод 132. По крайней мере, в некоторых вариантах выполнения, коммутирующие средства 150 выполнены в виде силового полевого МОП-транзистора 152. Кроме того, возможна разработка коммутирующих средств 150 в виде биполярного полевого МОП-транзистора, или в виде силового тиристора.
Соответствующие преобразователи 130 с обратной связью последовательно выключены своими выходными выводами 132 к соединительной линии 134 (см. Фиг.3).
Для запуска или тактирования коммутирующих средств 150, то есть силового транзистора 152, в преобразователе 130 с обратной связью используются средства 160 сширотно-импульсной модуляцией. Средства 160 с широтно-импульсной модуляцией вырабатывают широтно-модулированный сигнал, в котором отношение интервалов периода тактовых импульсов регулируется в соответствии с измеренной фактической величиной выходного напряжения. С этой целью фактическая величина, измеренная на выходе преобразователя 130 с обратной связью, вычитается из соответствующей заданной величины, и эта разность подается через управляющий усилитель преобразователя 130 с обратной связью на средства 160 широтно-импульсной модуляции. Здесь выходное напряжение управляющего усилителя преобразователя 130 с обратной связью сравнивается с пилообразным напряжением, частота которого определяет тактовую частоту преобразователя 130 с обратной связью. В зависимости от результатов этого сравнения, коммутирующие средства 150 замыкаются или размыкаются, и выходное напряжение регулируется нужным образом. Максимальное выходное напряжение обычно определяется напряжением пробоя коммутирующих средств 150 и соответствующего силового МОП-транзистора 152.
Средства 160 широтно-импульсной модуляции, в частности, средства 160 широтно-импульсной модуляции, которые приспособлены к регулированию или управлению, могут быть использованы соответствующим образом для управления коммутирующими средствами 150 преобразователя 130 с обратной связью или импульсным источником 126 электропитания, питающимся от сети.
Эти средства 160 широтно-импульсной модуляции могут вырабатывать последовательности импульсов, у которых может регулироваться длительность и/или амплитуда, и/или частота. Средства 160 широтно-импульсной модуляции являются широко используемыми средствами импульсной модуляции. Эти средства 160 широтно-импульсной модуляции вырабатывают сигнал с модуляцией длительности импульсов, отношением интервалов периода которых можно управлять в соответствии с измеренной фактической величиной выходного напряжения. Измеренную фактическую величину выходного напряжения можно, например, вычесть из заданной величины, и полученная разность может быть подана через управляющий усилитель преобразователя 130 с обратной связью на средства 160 широтно-импульсной модуляции.
Здесь выходное напряжение управляющего усилителя преобразователя 130 с обратной связью сравнивается с пилообразным напряжением, частота которого определяет частоту переключения или тактирования импульсного источника 126 электропитания. В зависимости от результата этого сравнения, включается или выключается коммутирующий транзистор 150, посредством чего устанавливается требуемое выходное напряжение.
Тактовая частота коммутирующих средств 150 может составлять килогерцы и, в частности, сотни килогерц, для обеспечения достаточно быстрого тактирования коммутирующих средств 150 и, в связи с этим, сравнительно низкой мощности рассеяния преобразователя 130 с обратной связью. Например, известны преобразователи 130 с обратной связью с частотой тактирования от 20 кГц до 200 кГц. В равной мере, возможны и более низкие и более высокие тактовые частоты.
Для того чтобы избежать, особенно в случае больших мощностей, необходимости использовать отдельные средства охлаждения для компонентов 122 преобразователя, эти компоненты 122 преобразователя могут быть размещены друг относительно друга специальным образом. Пространственный период расположения, однако, достаточно невелик, соответствуя размерам одного компонента преобразователя.
Говоря о компонентах 122 преобразователя и, в особенности, преобразователя 130 с обратной связью, которые используются в качестве таких компонентов, следует иметь в виду, что каждый из таких компонентов 122 преобразователя должен быть приспособлен для индивидуального управления или регулировки его выходного напряжения. Входы компонентов 122 преобразователя включены параллельно у каждого компонента преобразователя, поэтому подача напряжения и, вследствие этого, потребляемые ток и мощность полностью разделены. Из этого следует, что вне зависимости от выходного напряжения полная мощность системы может адаптироваться в соответствии с требованиями. Поэтому обеспечивается полная свобода в выборе мощности и выходного напряжения. Благодаря использованию большого числа компонентов 122 преобразователя дополнительно обеспечивается чрезвычайно точное управление выходным напряжением, а также мощностью, поскольку управление каждого компонента преобразователя производится только в интервале его напряжения независимо от остальных.
Если один из компонентов 122 преобразователя отказывает, гарантия энергоснабжения сохраняется (резервирование), поскольку другие компоненты 122 преобразователя управляются таким образом, что пропадание мощности компонента преобразователя, вышедшего из строя, компенсируется на выходе. Соответствующий интервал, в пределах которого работоспособные компоненты 122 преобразователя должны быть подстроены, очень невелик, поскольку относительно небольшое повышение напряжения на выходе большого числа компонентов 122 преобразователя приводит к значительно большему повышению полного выходного напряжения.
Использование компонента преобразователя и, особенно, преобразователя 130 с обратной связью дает возможность отказаться от дополнительных компонентов, то есть выполнить такие компоненты 122 преобразователя в виде интегральных схем, содержащих в дополнение к собственно преобразователю 130 с обратной связью другие элементы, например, средства управления коэффициентом мощности, средства обнаружения пониженного напряжения, средства отслеживания повышенного напряжения, так называемый "мягкий старт" и др.
Возвращаясь к Фиг.3, отметим, что по крайней мере источник переменного напряжения и/или преобразователь переменного напряжения в постоянное напряжение, и/или средства 136 ввода/вывода сигналов данных могут быть связаны с контроллером 76 таким образом, что может проводиться мониторинг, управление и более эффективная регулировка различных элементов системы электроснабжения в соответствии с настоящим изобретением. Этот контроллер 76 может, например, также определить отказ одного из компонентов 122 преобразователя, выполненного как преобразователь 130 с обратной связью. При обнаружении такого отказа, другие преобразователи 130 с обратной связью могут быть приведены в действие таким образом, чтобы компенсировать отказ одного такого преобразователя 130 с обратной связью несколько более высоким выходным напряжением, выдаваемым каждым из оставшихся преобразователей 130 с обратной связью.
При этом контроллер 76 может также управлять средствами широтно-импульсной модуляции.
Контроллер 76 может быть использован не только для мониторинга, но также и для организации системы связи между соответствующими блоками системы энергоснабжения. Это полезно особенно в случаях, когда различные блоки расположены на сравнительно больших расстояниях друг от друга и/или в недоступных местах. Благодаря использованию этой системы связи физическое обследование или обслуживание оборудования может быть ограничено редкими случаями, либо в связи с заменой блока.
Для мониторинга, управления и, в необходимых случаях, регулировки всех устройств системы 60 энергоснабжения и, возможно, также электрических устройств по кабельному соединению 68, контроллер может быть установлен, по крайней мере, на источнике переменного напряжения и/или средствах преобразования переменного напряжения в постоянное напряжение, и/или средствах ввода/вывода сигнала данных, а также, если требуется, в электрическом устройстве. При использовании подобного контроллера возникает интеллектуальная система питания, в которой производится управление и/или регулирование многих параметров. Примером работы контроллера 76 может служить то, как упомянутый контроллер 76 управляет преобразователями 130 с обратной связью не только в отношении их выходного напряжения, но и ведет их функциональный мониторинг. Например, в случае отказа одного преобразователя 130 с обратной связью, контроллером 76 может быть направлено к соответствующим средствам мониторинга сообщение о том, что один из преобразователей 130 с обратной связью, а может быть даже и какой конкретно, отказал или плохо работает. Одновременно, контроллер 76 может управлять оставшимися преобразователями 130 с обратной связью таким образом, что они компенсируют недостаток напряжения. Может быть направлено соответствующее сообщение. После отказа нескольких преобразователей 130 с обратной связью система в соответствии с изобретением может также направить через контроллер 76 соответствующий запрос на проведение ремонта, причем до выполнения ремонта будет гарантироваться полная работоспособность системы энергоснабжения.
Контроллер 76 может обнаруживать также и другие возможные дефекты в системе энергоснабжения, а при необходимости, и в электрических устройствах, питающихся от системы. Например, электрические устройства можно, по желанию, включать и выключать по линии передачи сигналов данных, управлять их работой или влиять на них каким-либо иным образом. Для обеспечения, в то же время, возможности посылки прямого запроса на различные средства и, также, на электрическое устройство посредством контроллера 76, через контроллер 76 может быть организована система связи с соответствующими средствами системы энергоснабжения и, при необходимости, с электрическим устройством.
В отличие от преобразователя переменного напряжения в постоянное, например, для получения 6000 В, такие компоненты 122 преобразователя просты в использовании и в обслуживании. Рассеяние тепла в компоненте преобразователя в этом случае обычно настолько мало, что нет необходимости в использовании отдельных средств охлаждения. Если компоненты 122 преобразователя установлены достаточно близко друг к другу, простых средств охлаждения, пропускающих, например, охлаждающий воздух через компоненты 122 преобразователя, будет достаточно даже в случае высокой мощности. По сравнению с известными преобразователями, расходы на охлаждение преобразователя 72 переменного напряжения в постоянное напряжение существенно снижаются.
Если один из компонентов 122 преобразователя отказывает, выходное напряжение снизится только на его n-ную часть, поэтому оставшиеся n-1 компонент 122 преобразователя все еще будут создавать достаточно высокое напряжение для электрического устройства. Только если произойдет отказ нескольких компонентов 122 преобразователя, возникнет необходимость замены этих компонентов 122, по крайней мере, частично. В любом случае, если произойдет отказ одного из нескольких компонентов 122 преобразователя, сохраняется гарантия, что подаваемое на электрическое устройство напряжение будет достаточно высоким для обеспечения его работы (обеспечивается резервирование).
Между преобразователем переменного напряжения в постоянное и электрическим устройством могут быть установлены фильтрующие средства 170, так что, при необходимости, может быть проведено дальнейшее сглаживание постоянного напряжения, вырабатываемого преобразователем переменного напряжения в постоянное напряжение.
Для определенных электрических устройств может быть необходимо, кроме подключения электропитания, также иметь линию передачи сигнала. Чтобы не использовать для этой цели дополнительное кабельное соединение с электрическим устройством, средства 136 для ввода/вывода сигналов данных могут быть подключены к кабельному соединению, причем подобные средства 136 для ввода/вывода сигналов данных специально устанавливаются между фильтрующими средствами 170 и электрическим устройством. Эти средства 136 для ввода/вывода сигналов данных могут, с одной стороны, использоваться для ввода соответствующих сигналов данных в линию передачи данных для, например, управления электрическим устройством или для передачи ему информации. В обратном направлении, данные, полученные от электрического устройства, могут быть выведены из кабельной соединительной линии и использованы, например, для мониторинга электрического устройства посредством подходящих для этого устройств, например, компьютеров и др.
В связи с этим, следует учесть, что передача данных с использованием выходного постоянного напряжения может производиться с меньшими помехами и на большей скорости, чем в случае, когда электрическое устройство питается переменным напряжением.
Частоты помех в кабельной соединительной линии также находятся приблизительно в области тактовой частоты, что приводит к уже достаточно высоким частотам помех при использовании 100 кГц. Помехи на столь высоких частотах обычно не влияют на работу компонентов системы энергоснабжения или электрического устройства.
Если частоты помех будут сдвинуты в область еще более высоких частот, по крайней мере, некоторые из тактируемых импульсных источников электропитания могут оказаться сдвинутыми по фазе тактирования относительно друг друга. На самом деле, собственная частота поддерживается для каждого из отдельных преобразователей 130 с обратной связью, то есть, например, тактовая частота 100 кГц. С этой частотой постоянный ток передается, соответственно, с вторичной стороны в кабель. Если упомянутое тактируемое питание сдвинуто по фазе тактовой частоты отдельного преобразовательного узла (например, только на одну наносекунду каждый на момент подачи питания), мы получим граничную частоту системы (то есть граничную частоту помехи на вторичной стороне), равную 100 кГц × n, где n - количество преобразователей 130 с обратной связью, у которых имеется сдвиг фаз тактовых частот. Например, если n равно 30, граничная частота системы достигает 3 МГц. В то же время, величина выходного напряжения помехи уменьшается до 1/n части от напряжения помехи отдельного узла.
Такой сдвиг в граничной частоте системы дает большие преимущества, когда по кабельному соединению одновременно с передачей энергии питания производится передача данных. С этой целью, в соответствии с изобретением, могут использоваться средства ввода/вывода сигнала данных. Эти средства одновременно служат для ввода данных, которые, например, должны передаваться к электрическим устройствам, и для вывода данных, полученных электрическими устройствами или иными узлами средств системы энергоснабжения.
Поскольку соответствующая передача сигналов данных обычно происходит в диапазоне частот нескольких десятков кГц, возможные остаточные помехи от граничной частоты системы находятся вдали от полосы частот передачи данных. Для сглаживания выходного напряжения теперь нет нужды использовать сопряженную со сложностями фильтрацию, например, посредством электролитических конденсаторов фильтра, а надежная передача данных с предельной скоростью теперь происходит по кабельному соединению практически без помех.
Для того чтобы передача данных стала еще надежнее, между узлом преобразователя переменного напряжения в постоянное напряжение и электрическим устройством могут быть установлены простые фильтрующие средства 170. Эти средства, однако, используются только в соответствии с изобретением, фильтруя остаточные помехи в полосе передачи данных, то есть, нескольких килогерц, например 50 кГц.
Вслед за преобразователем 72 переменного напряжения в постоянное напряжение, в кабеле 68 устанавливаются фильтрующие средства 170. Фильтрующие средства 170 отфильтровывают помеху выше частотного диапазона в несколько десятков кГц, которая может помешать передаче данных по кабелю 68.
Средства 136 ввода/вывода сигнала данных устанавливаются между фильтрующими средствами 170 и, по крайней мере, одним управляющим и исполнительным узлом 80, получающим постоянное напряжение и большую мощность от узла 70 питания и управления. Соответствующие сигналы данных вводятся через такие средства 136 в кабель 68, либо сигналы данных, передаваемые по кабелю 68 от управляющего и исполнительного узла 80, выводятся через такие средства 136. Тем самым делается возможной беспомеховая передача данных по кабелю 68 с высокой скоростью (десятки кГц). Здесь следует отметить, что граничная частота системы 20 может быть сдвинута путем сдвига тактовых частот отдельных компонентов 122 преобразователей в мегагерцевый диапазон, с тем, чтобы упомянутая граничная частота находилась далеко за пределами любых частотных диапазонов передачи данных, тем самым, делая возможным надежную передачу данных с высокой скоростью.
Управляющий и исполнительный узел 80 может, например, включать исполнительный элемент, и очевидно, что несколько управляющих и исполнительных узлов 80 могут получать по кабелю 68, соответственно, питание и данные. Подобный исполнительный механизм используется, например, для управления средствами вдоль магистрали с текучей средой. Средства и соответствующие исполнительные механизмы для приведения их в действие обычно установлены в удаленных местах, труднодоступных или недоступных, либо закрытых. Текучая среда может поступать под высоким давлением в линию передачи текучей среды либо по этой линии, поэтому, например, одни средства представляют собой узел аварийного отключения, который, в случае протечки в линии передачи текучей среды, предотвращает возможное проникновение агрессивной или экологически вредной текучей среды в окружающее пространство. Другими средствами для приведения в действие исполнительными механизмами являются клапаны, дроссели, насосы и др. Как правило, исполнительные механизмы потребляют большую мощность, поскольку текучая среда протекает по линии передачи текучей среды или втекает в нее под высоким давлением и, возможно, в больших количествах. Имеется возможность использовать соответствующее отключающее устройство уже на входе, то есть практически на источнике текучей среды, для предотвращения неуправляемого вытекания текучей среды в окружающее пространство.
Конечно, хорошо, если могут быть запрошены соответствующие параметры исполнительных устройств и управляемых ими средств, например, положения клапанов, отключающих устройств, действие насосов и т.п., и проведен их мониторинг посредством соединительных линий связи. Управление соединительной линией связи и мониторинг всех средств осуществляется через контроллер 76, который соединен со всеми соответствующими средствами и также с управляющим и исполнительным узлом 80.
Используя контроллер 76, возможно с большой точностью регулировать мощность для управляющего и исполнительного узла 80 соответствующим напряжением, и выполнять регулировку множества преобразователей 130 с обратной связью. Более того, контроллер 76 может управлять фазовым сдвигом в тактовых частотах каждого преобразователя 130 с обратной связью для получения очень высокой граничной частоты системы 20, чем обеспечивается скоростная беспомеховая передача данных через соответствующую соединительную линию 134 даже и по длинным кабелям и даже в случае малого сечения кабеля.
В случае отказа одного или нескольких преобразователей 130 с обратной связью, контроллер 76 сможет отрегулировать выходное напряжение, создаваемое оставшимися преобразователями 130 с обратной связью, таким образом, что с выхода преобразователя 72 переменного напряжения в постоянное напряжение на соответствующий управляющий и исполнительный узел 80 будет продолжать подаваться требуемое напряжение и мощность питания.
В соответствии с предпочтительным вариантом выполнения максимальное выходное напряжение импульсного источника электропитания выбирается таким образом, что оно не превосходит максимально возможного значения, установленного ниже напряжения пробоя соответствующего компонента импульсного источника электропитания, особенно, коммутирующих средств 150, и обеспечивается достаточный запас по пробивному напряжению.
Как уже упоминалось выше, преобразователи 130 с обратной связью относятся к преобразователям, в которых прерывание с тактовой частотой производится на входе. Преимуществом такого способа является то, что преобразователь 130 с обратной связью обеспечивает получение многих гальванически развязанных, управляемых выходных напряжений.
Подобный способ регулировки выходного напряжения дает преимущество особенно в случае отказа одного или нескольких преобразовательных узлов. Например, если среди упомянутого выше числа в 30 преобразовательных узлов откажет один, выходное напряжение уменьшится только на 200 В.
Система в целом останется работоспособной и может подавать напряжение с достаточной мощностью. Кроме того, благодаря возможности регулировки выходного напряжения каждого преобразовательного узла остается возможность регулировкой добавить недостающие 200 В, с использованием, что важно, оставшихся преобразовательных узлов. Поскольку каждый из оставшихся преобразовательных узлов должен обеспечить только малую часть недостающих 200 В, выходное напряжение каждого узла увеличивается только на небольшую величину. Преобразовательные узлы могут быть в этом случае сконструированы таким образом, что, например, во время нормальной работы, когда функционируют все преобразовательные узлы, узлы выдают на выход в виде выходного напряжения только часть того максимального выходного напряжения, которое они могут выдавать. В результате, диапазон подстройки относительно велик, поэтому допустим отказ нескольких преобразовательных узлов без отказа всей системы,
На Фиг. 5 показано преобразовательное устройство 86 управляющего и исполнительного узла 80 (см.Фиг.2), которое, в предпочтительном варианте выполнения, представляет собой преобразовательное устройство постоянного напряжения, имеющее большое число преобразовательных узлов 180 постоянного напряжения в виде импульсных источников 182 питания. Преобразовательные устройства 86 могут быть построены в соответствии с патентной заявкой США серийный №10/489,453, поданной 12 марта 2004 г. и озаглавленной "Преобразовательное устройство постоянного напряжения", которая претендует на привилегии заявки РСТ/ЕР01/12547, поданной 30 октября 2001 г., которая претендует на приоритет заявки DE 20018560.8, поданной 30 октября 2000 г. (1600-09400; ОТЕ-030453), которые целиком включены в настоящее описание посредством ссылки. Импульсные источники 182 питания включены один за другим по входу и подключены к выходу узла 70 питания и управления через соединительную линию 184 кабелем 68. Узел питания и управления 70, выдавая постоянное напряжение, расположен в удалении от управляющего и исполнительного узла 80; длина кабеля 68 может составлять несколько километров, например, 50, 60 и более км.
Фильтрующие средства 190 расположены вверх относительно направления движения энергии от преобразовательных узлов 180 постоянного напряжения. Фильтрующие средства 190 отфильтровывают, в частности, частоты в диапазоне, требующемся для подключения канала связи к источнику постоянного напряжения узла 70 питания и управления (показан на Фиг.2). Фильтрация может быть, например, выполнена в пределах диапазона частот до 50 кГц.
Преобразовательные узлы 180 постоянного напряжения и соответствующие импульсные источники 182 питания, включены параллельно друг другу по выходу и соединены, соответственно, соединительной линией 186. Соединительная линия 186 ведет к, по крайней мере, одному электрическому устройству 46, например, исполнительному устройству.
Исполнительное устройство 46 может работать совместно со средствами управления потоком текучей среды на входе линии передачи жидкости либо внутри линии передачи текучей среды. Эти средства могут содержать, например, клапаны, отключающие устройства для аварийных случаев, например, протечек, разрывов трубопровода и т.п., дроссельных устройств, насосов и др. Эти средства и работающие совместно с ними исполнительные устройства 46 могут быть расположены в труднодоступной местности. Эти средства и исполнительные механизмы 46 также могут быть установлены под водой. Текучая среда может под высоким давлением подаваться в трубопроводы и продвигаться по ним. Кроме того, текучая среда может быть агрессивной либо загрязняющей окружающую среду, поэтому приобретает первостепенное значение соответствующий мониторинг потока текучей среды и управление им.
Исполнительные механизмы 46, так же как и преобразовательное устройство 86 постоянного напряжения, могут быть установлены ниже уровня моря. Кабельное соединение 184 может быть продолжено до морской поверхности к узлу 70 питания и управления. Также возможна установка исполнительных механизмов 46 на поверхности земли в труднодоступном районе, с их управлением и мониторингом, соответственно, из удаленного места.
Устройства 108, 110 управления сопряжением показаны на Фиг.2 и используются для обмена данными. Как показано на Фиг.2, подводный электронный модуль или контроллер 112 могут содержать электронику для управления различным оборудованием под водой и, в частности, на морском дне, например, клапанами, противовыбросовыми устройствами, исполнительными устройствами и аналогичным оборудованием. Как правило, соответствующая электроника в контроллере 112 резервирована. Контроллер 112 может быть подключен, по крайней мере, к преобразовательному устройству 86 постоянного напряжения для осуществления мониторинга, управления и регулирования соответствующих преобразовательных узлов 180 постоянного напряжения. Этот контроллер также может осуществлять мониторинг, управление и регулирование других компонентов управляющего и исполнительного устройства 80.
Для передачи соответствующих данных узлу 70 питания и управления и средствам, дополнительно подключенным к такому устройству, могут использоваться средства 84 ввода/вывода. Эти средства установлены вверх по направлению движения энергии от фильтрующих средств 190 между фильтрующими средствами 190 и узлом 70 питания и управления. Соответствующие сигналы данных могут быть введены и выведены, например, посредством контроллера 112 в соединительную линию 184 или из нее через средства 84 ввода/вывода данных. Таким образом, устанавливается линия связи между узлом 70 питания и управления и управляющим и исполнительным узлом 80. Линия связи является двунаправленной, поэтому обмен данными по линии 184 может происходить в обоих направлениях.
Благодаря использованию большого числа преобразовательных узлов 180 и конфигурации узлов 180, каждый узел 180 преобразует только часть высокого постоянного напряжения, подводимого от узла 70 питания и управления. Например, если постоянное напряжение в 6000 В подается от узла 70 питания и управления в качестве входного напряжения управляющего и исполнительного узла 80, причем каждый из преобразовательных узлов 180 будет преобразовывать только n-ю часть входного напряжения, при условии, что они имеют одинаковую конструкцию и количество преобразовательных узлов 180 равно n. Например, если n равно 30, каждый преобразовательный узел 180 должен преобразовывать только 200 В. Электрическая прочность соответствующих компонентов преобразовательных узлов обычно значительно выше 200 В, поэтому риск в этом отношении невелик.
На выходе, в зависимости от конструкции преобразовательного узла 180 и при соответствующем подключении к кабельному соединению 186, возможно, например, подать на исполнительное устройство 46 постоянное напряжение величиной 300 В.
Конечно, возможно использовать различное число преобразовательных устройств 180. Также возможно использовать преобразовательные узлы 180 неидентичных конструкций и преобразовывать в соответствующее выходное напряжение, например, различные величины входного напряжения на каждый преобразовательный узел. Однако из соображений обслуживания и ремонта идентичная конструкция всех преобразовательных узлов 180 обеспечивает преимущество.
Более того, благодаря использованию большого числа преобразовательных узлов 180, существует гарантия того, что при отказе одного, двух, трех или даже большего числа преобразовательных узлов 180, нет опасности полного отказа подачи напряжения к электрическом устройству, поскольку сохранившие работоспособность преобразовательные узлы 180 изменением тактирования на входе могут забирать больше напряжения на входе и преобразовывать входное напряжение в требуемое выходное напряжение.
Таким образом, цель настоящего изобретения состоит в том, чтобы создать преобразователь 86 постоянного напряжения, обладающий конструктивной простотой и способностью преобразовывать высокие постоянные напряжения даже и при высокой мощности, при этом должна обеспечиваться более высокая надежность преобразователя 86 и отпасть необходимость в использовании системы охлаждения, требующей больших затрат.
Как показано на Фиг.5, преобразователь 86 постоянного напряжения может содержать множество компонентов 180 преобразователя постоянного напряжения, причем каждый из упомянутых компонентов 180 преобразователя постоянного напряжения по входу последовательно подключен к узлу 70 управления и питания, а по выходу включен параллельно к кабельному соединению 186, для подачи преобразованного постоянного напряжения к электрическому устройству 46.
В, по крайней мере, некоторых вариантах выполнения, преобразовательные узлы 180 могут быть разнесены друг от друга с тем, чтобы не оказывать взаимного влияния в отношении теплообмена, при этом каждый преобразовательный узел 180 может охлаждаться независимо.
В зависимости от количества и конструкции преобразовательных узлов, на вход могут подаваться постоянные напряжения от 1 кВ до 10 кВ и, в частности, от 3 кВ до 8 кВ. Еще раз необходимо отметить, что возможно преобразование еще более высоких напряжений и, соответственно, более высоких мощностей, если число преобразовательных узлов 180 или их конструкция будут соответственным образом изменены. Электрическая прочность компонентов каждого преобразовательного узла 180 должна быть выбрана, по крайней мере, так, чтобы преобразуемое входное напряжение преобразовательного узла 180 было меньше величины электрической прочности.
Для создания высокоэффективных преобразовательных узлов 180, которые выделяют небольшое количество тепла, что обеспечивает высокую надежность и, с точки зрения экономики, одновременно хороши и в производстве и в использовании, соответствующий преобразовательный узел 180 постоянного напряжения может быть выполнен как тактируемый импульсный источник 126 питания. По сравнению с, например, источниками питания 182 с линейной стабилизацией, тактируемые импульсные источники 126 питания обладают меньшими размерами, создают меньше помех, не требуют сложных сглаживающих устройств и имеют более широкий диапазон входных напряжений.
Известны различные варианты выполнения подобных тактируемых импульсных источников 126 питания. Во-первых, их можно разделить на импульсные сетевые источники 126 питания с тактированием на выходной стороне и с тактированием на входной стороне. В этих двух основных вариантах, входной ток может постоянно втекать в накопительный конденсатор импульсного сетевого источника 126 питания, либо входной ток протекает только в определенные моменты времени так, что такой преобразователь относится к преобразователям прямого действия или преобразователям 130 с обратной связью. Для создания компактного и надежного компонента импульсный сетевой источник 126 питания может, например, быть выполнен в виде преобразователя 130 с обратной связью. В предпочтительном варианте выполнения, такой преобразователь 130 с обратной связью может тактироваться со стороны входа с тем, чтобы получить гальваническую развязку между входом и выходом, причем такой преобразователь может быть однофазным или двухтактным. В нашем случае, преимуществом однофазных преобразователей является то, что они обычно используют только один силовой коммутатор в качестве тактирующих коммутирующих средств 150.
Этот силовой коммутатор 150 может быть выполнен на основе силового МОП-транзистора или биполярного МОП-транзистора. Кроме того, в качестве тактирующих коммутирующих средств 150 также могут быть использованы тиристоры, особенно, когда речь идет о преобразовании мощности, измеряемой киловаттами.
Вышеупомянутые импульсные сетевые источники 126 питания имеют, особенно в случае работы на высокой мощности, ряд преимуществ, например, меньшую мощность рассеяния, меньший вес, меньший объем, отсутствие помех, более низкие затраты на сглаживание и более широкий диапазон входных напряжений. Импульсные сетевые источники 126 питания и, особенно, преобразователи 130 с обратной связью используются в самых разнообразных областях, например, в СВЧ-печах, компьютерах, электронных адаптерах для флуоресцентных ламп, промышленной электронике, электронике развлечений, экранах, сердечных дефибрилляторах и т.п. Преобразователи 130 с обратной связью также прекрасно подходят для использования в тех случаях, когда на выходе требуется большая мощность. Импульсные источники 182 питания могут подразделяться на импульсные источники 182 питания с тактированием с входной стороны и с тактированием на выходной стороне. Импульсные источники 182 питания, тактируемые на выходной стороне, включают, например, понижающие и повышающие преобразователи. Однако для того чтобы осуществить электрическую развязку между входом и выходом, в качестве преобразовательных узлов, в соответствии с настоящим изобретением, могут быть использованы импульсные источники 182 питания с тактированием со входной стороны, в частности, преобразователи 130 с обратной связью. Подобные преобразователи 130 с обратной связью также называются изолирующими трансформаторами.
Схемы на Фиг.6-8 описаны в патентной заявке США серийный №10/489,584, поданной 12 марта 2004 г. и озаглавленной "Преобразовательное устройство постоянного напряжения", которая претендует на привилегии заявки РСТ/ЕР02/10469, поданной 18 сентября 2002 г., которая претендует на приоритет заявки DE 20115474.9, поданной 19 сентября 2001 г. (1600-09600; OTE-030455US), которые целиком включены в настоящее описание посредством ссылки.
На Фиг.6 представлен в упрощенном виде вариант выполнения двухтактного преобразователя 238, используемого в качестве импульсного сетевого источника 182 питания. Входные выводы 192 и 194 этого двухтактного преобразователя включены последовательно с другими двухтактными преобразователями 238 или импульсными сетевыми источниками 182 питания согласно схеме на Фиг.5. На входной стороне двухтактного преобразователя 238 могут быть включены стабилитрон 240 и входной конденсатор 196. Эти два компонента соединены параллельно друг другу и входной обмотке трансформатора 92.
Стабилитрон 240, в свою очередь, может состоять из ряда транзисторов и нагрузочных сопротивлений.
Первичная обмотка трансформатора 92 связана, таким образом, с коммутирующими средствами 200.
Эти коммутирующие средства 200 на Фиг.6 показаны в виде простого выключателя. Фактически, подобные коммутирующие средства 200 выполняются посредством одного или нескольких коммутирующих транзисторов 222, 224, 226 и 228 (см., например, Фиг.7 и 8); в качестве подобных коммутирующих транзисторов могут использоваться силовые МОП-транзисторы, биполярные МОП-транзисторы или тиристоры. Первичная обмотка имеет магнитную связь со вторичной обмоткой трансформатора 92.
Вторичная обмотка подключена к выходным выводам 206 и 212 двухтактного преобразователя 238. Диод 202 и нагрузка 204 последовательно включены между первичной обмоткой 104 и выходным выводом 206. Нагрузкой 204 может быть, например, дроссель 208, как показано на Фиг.7 и 8.
Выходные выводы 206 всех двухтактных преобразователей 238 или импульсных сетевых источников 182 питания согласно Фиг.5 соединены параллельно друг другу и соединительной линии 186. Другие выходные выводы 212 также соединены параллельно друг другу и заземляющему проводу 214.
На выходной стороне двухтактного преобразователя 238 сглаживающий конденсатор 210 соединен параллельно вторичной обмотке трансформатора 92.
На Фиг.7 и 8 двухтактный преобразователь 238, соответствующий Фиг.6, показан подробно, в первом случае в виде полномостового двухтактного преобразователя 242, а во втором случае в виде полумостового двухтактного преобразователя 244, причем оба двухтактных преобразователя 242 и 244 показаны вместе с соответствующими схемами. Кактаковые, подобные схемы для полномостовых и полумостовых двухтактных преобразователей 242 и 244 известны. Представленные схемы отличаются от известных схем в отношении способа соединения двухтактных преобразователей на входной стороне и выходной стороне, то есть тем, что соответствующие выводы последовательно включены на входной стороне и параллельно включены на выходе.
Кроме того, стабилитрон 240 на входной стороне каждого двухтактного преобразователя 238 или 242, 244 включен параллельно первичной обмотке трансформатора 92.
Этот стабилитрон 240 служит в качестве нагрузки на входе разных двухтактных преобразователей 238 для включения системы по напряжению и потреблению энергии еще до подключения или дополнительного подключения соответствующих электрических устройств 46, 24. Пока электрические устройства 46, 24 не подключены, либо не подключены дополнительные устройства, энергия в системе потребляется и преобразуется в тепло стабилитронами 240. Когда, затем, дополнительно подключаются электрические устройства 46, 24, происходит перераспределение энергии в каждом двухтактном преобразователе 238, и только небольшая часть энергии рассеивается в тепло в стабилитроне 240. Благодаря использованию большого числа стабилитронов 240 и тому, что они установлены с интервалом, выделяющаяся в стабилитронах виде тепла электрическая энергия не приводит к перегреву преобразователя 86 постоянного напряжения, но, в зависимости от места установки преобразователя, может быть рассеяна непосредственно в воздух или в воду в виде сбрасываемого тепла. Отпадает необходимость в использовании сложных и дорогих систем охлаждения.
Когда электрические устройства 46 на удаленной установке 25 не требуют электрической энергии, они выключаются, то есть отсоединяются от системы. Соответственно, вся энергия снова преобразуется в тепло в стабилитроне 240. Если электрическое устройство 46, о котором идет речь, или другое электрическое устройство 46 отключается или дополнительно подключается снова, система в целом может быть переключена на пониженное напряжение, например на 3000 В или даже еще ниже. Пониженное напряжение все еще необходимо для работы контроллера и других узлов преобразователя 86 постоянного напряжения, которые функционируют постоянно.
В полномостовом двухтактном преобразователе 242 согласно Фиг.7 полный комплект из четырех коммутирующих транзисторов 222, 224, 226, 228 объединен в коммутационные средства 200. Коммутирующие транзисторы 222, 224, 226, 228 работают попарно для осуществления двухтактного включения трансформатора 92, при этом отношение интервалов периода двухтактного тактирования равно 1:1.
На выходной стороне используются соответствующие диоды 202, а на входной стороне включено несколько входных конденсаторов 196.
Для включения разных коммутирующих транзисторов 222, 224, 226, 228 могут использоваться средства 230 импульсной модуляции, как это показано на Фиг.8. Эти средства 230 импульсной модуляции выдают последовательности импульсов, длительность, и/или амплитуда, и/или частота которых изменяются так, чтобы тактировать коммутирующие транзисторы 222, 224, 226, 228. Для ясности изложения, средства 230 импульсной модуляции на Фиг.6 и 7 не показаны.
Как упоминалось ранее, существуют электрические устройства, для которых необходимо одновременно высокое напряжение и высокая мощность. При возникновении, при включении электрического устройства 46, внезапной потребности в напряжении и мощности, которые в этот момент не подаются, узел 70 энергоснабжения и питания может отключиться из-за действия сигнала обратной связи, появившегося поддействием внезапной потребности или чрезмерного потребления энергии. Для того чтобы избежать подобного отключения и действия отрицательной обратной связи, на входе тактируемого импульсного сетевого источника 182 питания установлена нагрузка 240, соединенная параллельно трансформатору 92 импульсного сетевого источника 182 питания.
В преобразователе 86 постоянного напряжения согласно настоящему изобретению предусмотрено, что перед включением или запитыванием электрического устройства 46, напряжение и мощность в управляющем и исполнительном узле 80 увеличиваются, по крайней мере, до значений, необходимых для электрического устройства 46. До тех пор, пока электрическое устройство 46 не будет фактически включено, напряжение падает на нагрузке 240, и мощность преобразуется в тепло как рассеиваемая мощность. Только когда электрическому устройству 46 потребуется энергия, мощность, рассеиваемая в нагрузке 240, подается в электрическое устройство 46.
Для источника постоянного напряжения стабильное потребление и постоянная нагрузка очень заметно, так как перераспределение мощности происходит внутри, и мощность не возвращается в узел 70 питания и управления.
Как было описано выше, нагрузка 240 может быть реализована в виде стабилитрона 240, поэтому, при необходимости, напряжение и мощность могут быть резко подняты до требуемых значений непосредственно перед тем моментом, когда они понадобятся электрическому устройству. Полное напряжение и полная мощность могут в этом случае быть подняты в течение нескольких миллисекунд и поглощены в стабилитроне 240. Подсоединение электрического устройства 46 или дополнительное подключение производится только тогда, когда напряжение и мощность вырастут окончательно. Затем напряжение и мощность подаются на электрическое устройство 46, при этом на стабилитроне 240 падает только остаточное напряжение и поглощается небольшая часть мощности (несколько процентов). Если электрическое устройство затем отключается, на стабилитроне 240 будет падать полное напряжение, и упомянутый стабилитрон 240 будет поглощать полную мощность системы. Затем напряжение и мощность могут быть снижены до уменьшенных значений. Эти уменьшенные значения достаточны для питания соответствующих компонентов системы, например, средств мониторинга и управления, которые также функционируют, если не подключены электрические устройства или нет дополнительных подключений.
Если в питании компонентов преобразователя 86 постоянного напряжения согласно настоящему изобретению нет необходимости, напряжение и мощность могут быть полностью отключены или снижены до нуля. Как только опять появляется потребность со стороны электрического устройства, напряжение и мощность снова нарастают в течение нескольких миллисекунд.
В некоторых вариантах выполнения стабилитроны 240 могут быть выполнены посредством полевых транзисторов или нагрузочных сопротивлений. Более того, стабилитроны обеспечивают в каждом преобразовательном компоненте 182 хорошее рассеяние тепла от выделяющейся мощности, преобразующейся в тепло. Тепло в данном случае не выделяется в ограниченном объеме, а образуется во многих местах, поэтому тепло может отводиться непосредственно в воздух или в воду или другим подобным способом. Отпадает нужда в использовании специальных систем охлаждения.
Более того, стабилитроны могут иметь очень большую крутизну ограничения, что позволяет, при необходимости, дополнительно стабилизировать выходное напряжение. Если стабилитрон 240s и соответствующие компоненты преобразователя имеют одинаковый тип конструктивного исполнения, это также обеспечивает одинаковые величины подаваемых на каждый компонент токов. Точность стабилизации напряжения составляет 2, 3, самое большее, 5%.
По крайней мере, в некоторых вариантах выполнения, для увеличения частоты отсечки фильтра 184, тактирование импульсных источников 182 питания преобразовательного устройства 86 постоянного напряжения может производиться со сдвигом фазы относительно друг друга.
Для достижения при этом уровня соответствующих гармоник, составляющих только малую долю, фазовый сдвиг тактирования соседних импульсных источников 182 питания может составлять 1/n, если n - число импульсных источников 182 питания преобразовательного устройства 86 постоянного напряжения. Таким образом, величина фазового сдвига такова, что (n+1)-ый импульсный источник 182 питания снова будет в фазе с первым импульсным источником 182 питания (циклический фазовый сдвиг).
Импульсные сетевые источники 182 питания преобразователя 86 постоянного напряжения могут в режиме тактирования со сдвигом фазы для смещения граничной частоты помехи тактирования, что важно особенно в случае линии связи в направлении узла 70 питания и управления. Подобный двухтактный преобразователь 182 может быть выполнен в виде полумостового или полномостового двухтактного преобразователя 232. Для достижения максимальной мощности, импульсный источник 182 питания может быть выполнен как полномостовой двухтактный преобразователь 232.
Подобные компоненты 180 преобразователя для входного напряжения, составляющего, например, несколько сотен вольт, в настоящее время имеются на рынке, в то время как компоненты преобразователя на напряжение более тысячи или несколько тысяч вольт на входе на рынке отсутствуют вовсе, либо очень дороги и сложны.
Параллельное соединение компонентов 180 преобразователя на выходной стороне отражается, в зависимости от мощности отдельного компонента 180 преобразователя, на полной мощности системы. В зависимости от полной требуемой мощности, соответственно выбирается число и конструкция компонентов 180 преобразователя. Вся система может быть легко адаптирована таким путем к заданным требованиям.
Для того чтобы удовлетворить требованиям в отношении управления флуктуациями сети и управления нагрузкой, тенденции миниатюризации, и желанию сократить рассеиваемую мощность, компоненты 180 преобразователя могут быть выполнены кактактируемые импульсные сетевые источники 182 питания. Подобные тактируемые импульсные сетевые источники 182 питания имеют, по сравнению с обычными узлами питания, эффективность, превышающую в некоторых случаях 90%, сокращение объема и веса до 60%, стабильность напряжения 1-2%, требуют несложные фильтрующие средства, а их показатель "цена/эксплуатационные характеристики" более высок.
В качестве преимущества также следует расценивать то, что когда тактирование импульсного сетевого источника 182 питания производится по входу, обеспечивается гальваническая развязка выходной стороны и входной стороны.
Импульсный сетевой источник 182 питания может быть выполнен в виде двухтактного преобразователя 188 с тем, чтобы использовать импульсный сетевой источник 182 питания также для работы на высокой мощности. Двухтактный преобразователь 182 может быть выполнен как полумостовой, либо как полномостовой двухтактный преобразователь.
Импульсный сетевой источник 182 питания может включать коммутирующие транзисторы 222, 224, 226 и 228, желательно силовые МОП-транзисторы и силовые биполярные МОП-транзисторы, при этом трансформатор импульсного сетевого источника 182 питания, который тактируется по входной стороне, может коммутироваться электронным путем несложными средствами. В данном случае следует обратить внимание на то, что, например, в полномостовом двухтактном преобразователе четыре таких коммутирующих транзистора 222, 224, 226 и 228 включены, соответственно, попарно.
Коммутирующие транзисторы 222, 224, 226 и 228 могут тактироваться в двухтактном режиме с отношением интервалов периода тактирования, равным 1:1, для достижения низкого тока потребления трансформатором в двухтактном преобразователе.
Для получения минимально возможного уровня гармонических составляющих на выходе, импульсные сетевые источники 182 питания преобразователя 86 постоянного напряжения могут тактироваться синхронно. Для управления коммутирующими транзисторами, импульсный сетевой источник питания может содержать средства импульсной модуляции для тактового управления коммутирующими транзисторами 222, 224, 226 и 228, при этом средства импульсной модуляции выдают последовательность импульсов изменяемой длительности или амплитуды и/или частоты с тем, чтобы тактировать коммутирующие средства, то есть представляющие их коммутирующие транзисторы 222, 224, 226 и 228.
Для включения коммутирующих средств различных импульсных сетевых источников 182 питания с одновременным, в частности, управлением или регулированием контроллером, импульсные сетевые источники 182 питания могут быть оснащены средствами импульсной модуляции, которые выдают последовательности импульсов с изменяемыми длительностями и/или амплитудами, и/или частотами повторения с тем, чтобы тактировать коммутирующие средства, то есть представляющие их коммутирующие транзисторы 222, 224, 226 и 228.
Коммутирующие средства для, соответственно, коммутации трансформатора импульсного источника питания могут быть выполнены в виде коммутирующего транзистора, в частности силового МОП-транзистора или биполярного МОП-транзистора. Возможно также выполнение коммутирующих средств в виде тиристора.
В двухтактном преобразователе используются, по крайней мере, два коммутирующих транзистора 222, 224, 226 и 228 в двухтактном режиме. Также преимуществом является то, что возможна работа в двухтактном режиме с отношением интервалов периода тактирования, равным 1:1. Это означает, что оба коммутирующих транзистора 222, 224, 226 и 228 открываются каждый по очереди на одинаковые промежутки времени.
Для достижения выходного напряжения с минимальными пульсациями и имеющего относительно низкий уровень гармоник, импульсные источники 182 питания преобразователя 86 постоянного напряжения могут тактироваться синхронно. Это означает, что все импульсные источники 182 питания тактируются с одной тактовой частотой.
Для обеспечения, с учетом этого, беспомеховой передачи по линии связи и, в то же время, полного рабочего диапазона постоянного напряжения на входе, тактовая частота импульсного источника питания может составлять в интервале от 10 кГц до более чем 1 МГц и, в частности, от 50 кГц до 300 кГц.
В связи с этим, у каждого импульсного источника 182 питания может быть, например, перестроено выходное напряжение путем изменения скважности, в частности, в случае отказа другого импульсного источника 182 питания преобразовательного устройства 86 постоянного напряжения. В простейшем случае перестройка выходного напряжения импульсного источника 182 питания может выполняться посредством изменения скважности работы коммутирующего транзистора.
Для обеспечения передачи данных по кабельному соединению в направлении источника постоянного напряжения, то есть без помех и на большой скорости, преобразовательное устройство 86 постоянного напряжения может содержать фильтрующие средства 190, установленные вверх по пути движения энергии на входной стороне.
В части фильтрующих средств 190, следует дополнительно упомянуть, что такие средства отфильтровывают, в частности, диапазон частот, в пределах которого работает линия связи с источником постоянного напряжения. Это означает, что фильтруется только нижняя часть диапазона частот до, например, 50 кГц. Для этого достаточно использовать относительно простые и недорогие фильтры.
Для удаления помех на частотах в пределах частотного диапазона, необходимого для линии связи, преобразователь 86 постоянного напряжения может иметь фильтрующие средства 190, установленные перед подобным преобразователем 86 постоянного напряжения на его входе. Эти фильтрующие средства 190 специально фильтруют частоты в диапазоне до, приблизительно, 50 кГц.
Для создания подходящей линии связи простыми средствами и только после фильтрации средства для ввода/вывода 84,136 сигналов данных могут быть подключены вверх от упомянутых фильтрующих средств 190 в направлении источника постоянного напряжения.
Дополнительно следует отметить, что фильтрующие средства 190 между преобразователем 86 постоянного напряжения и источником постоянного напряжения могут быть выполнены с использованием достаточно небольших конденсаторов, поскольку из-за того, что тактирование отдельных компонентов преобразователя производится со сдвигом фазы, граничная частота системы очень высока.
Для мониторинга, управления и регулировки соответствующих компонентов преобразовательного устройства 86 постоянного напряжения, расположенного на месте проведения работ, по крайней мере, к преобразовательному устройству 86 постоянного напряжения и его компонентам может быть присоединен контроллер 112. Контроллер 112, однако, также может обслуживать и электрические устройства, на которые подается от преобразовательного устройства постоянное напряжение, и может вести их мониторинг в части функционирования и осуществлять управление и регулировку этих устройств.
Функция мониторинга контроллера, используемого в соответствии с изобретением, может обеспечивать мониторинг, например, отдельных импульсных источников питания, сообщать о неисправностях соответствующих импульсных источников питания и место установки упомянутых импульсных источников питания внутри преобразовательного устройства 86 постоянного напряжения, и посылать сигнал тревоги в случае отказа заранее определенного числа импульсных источников питания. Соответствующая информация с контроллера может передаваться через соединительный коаксиальный кабель к удаленному источнику постоянного напряжения и представлена там соответствующим образом.
Контроллер 112 может быть связан с, по крайней мере, преобразователем 86 постоянного напряжения и его компонентами таким образом, чтобы конфигурировать преобразователь 86 постоянного напряжения так, чтобы можно было автоматически управлять упомянутым преобразователем 86 постоянного напряжения и, при необходимости, подключенным к нему электрическим устройством 46, и вести их мониторинг. Контроллер 112 может, например, обнаруживать отказ компонента преобразователя и, при необходимости, место установки упомянутого компонента преобразователя. Эта информация может передаваться по линии связи и средствам 84, 136 ввода/вывода сигналов данных в источник постоянного напряжения и связанные с ним узлы. Здесь эта информация может быть представлена в нужном виде на воспроизводящем устройстве, например экране и т.п. При отказе соответствующего числа компонентов преобразователя контроллер выдает также и требование на проведение ремонта.
Кабельное соединение 68 может содержать, по крайней мере, один коаксиальный кабель, поэтому, при необходимости передачи высокой мощности, и если напряжение и данные должны передаваться одновременно, может быть осуществлено упомянутое кабельное соединение, характеризующееся малым сечением, что позволяет снизить расходы, особенно в случае больших расстояний. Поскольку передаваемое по коаксиальному кабелю напряжение является напряжением постоянного тока, возникают только потери в линии, в то время как потери дополнительного затухания, возникающие при передаче переменных напряжений, отсутствуют. Возвращаясь к Фиг.1(С), отметим, что электрические устройства 46 или электрические узлы 24 могут представлять собой комбинацию исполнительных устройств, датчиков, двигателей и другого электрооборудования, установленного на удаленной установке 25. Удаленная установка 25 может включать подводное устье скважины с морской донной фонтанной арматурой. В качестве примера можно привести узел устья скважины, показанный и описанный в патенте США 6039119, включенный в настоящее описание посредством ссылки, причем фонтанная арматура с трубной обвязкой, описанная там, может быть использована с вариантами выполнения настоящего изобретения. Донная фонтанная арматура может также представлять собой фонтанную арматуру двуствольной скважины. Электрические устройства могут представлять собой исполнительные элементы, которые приводят в действие какие-либо устройства, например, клапаны, заслонки и другие устройства, используемые для управления потоком текучей среды в подводной системе. В предпочтительных вариантах выполнения, использование электропитания в подводной системе позволяет отказаться от использования клапанов с гидравлическим приводом. Таким образом, в управлении и работе подводной установки 25 может использоваться только электроэнергия. Все электрические системы обладают множеством преимуществ, например, быстротой реакции, отсутствием гидравлических текучих сред, отсутствием сброса текучих сред в море (безопасно для окружающей среды) и способностью выполнять в реальном масштабе времени диагностику исполнительных механизмов, клапанов и заслонок установки 25. Исчезает необходимость в наземном силовом гидравлическом блоке, а наземное оборудование может быть более компактным.
В приведенных ниже вариантах выполнения описаны примеры электрических устройств 46 и электрических узлов 24, которые могут быть использованы совместно с электрической системой 60 управления и питания, в соответствии с настоящим изобретением.
На Фиг.9 показано сечение электрического устройства 46 удаленной подводной установки 25. Электрическое устройство 46 представляет собой исполнительную систему 250, выполненную в соответствии с патентной заявкой США серийный №10/276,204, поданной 12 ноября 2002 г. и озаглавленной "Исполнительное устройство", которая претендует на привилегии заявки РСТ/ЕР01/05156, поданной 7 мая 2001 г., которая претендует на приоритет заявки DE 20008415.1, поданной 11 мая 2000 г. (1600-07500; ОТЕ-030295), которые целиком включены в настоящее описание посредством ссылки. Исполнительная система 250 крепится посредством фланцевого корпуса 286 к устройству 252 управления в виде запорного клапана. Исполнительная система 250 включает кожуху 254 системы, прикрепленную через фланец к одной стороне устройства 252 управления, причем исполнительный элемент 260 может скользить вдоль осевого направления 256 для обеспечения перемещения между выдвинутым положением 262 и отведенным положением 264. Исполнительный элемент 260 присоединен к золотнику 258 клапана, который соответственно расположен внутри устройства 252 управления таким образом, что золотник 258 клапана может сдвигаться в направлении 276 сдвига.
В выдвинутом положении 262, исполнительный элемент выдвинут таким образом, чтобы сдвинуть золотник 258 клапана внутри отверстия 270 для золотника устройства 252 управления в положение, где он открывает отверстие 272 поперечного потока сквозь запорный клапан 252. По крайней мере, одна возвратная пружина 266 установлена с другой стороны устройства 252 управления, оказывающая давление на исполнительную систему 250 в направлении 268 исходного положения. Соединительная линия 280 соединяет исполнительную систему 250 с управляющим и исполнительным устройством 80. Соединительная линия 280 используется для управления исполнительной системой 250 и для передачи данных.
На Фиг.10 показано продольное сечение исполнительной системы 250. В верхней половине Фиг.10 исполнительный элемент 260 показан в отведенном положении 264, а в нижней половине, отделенной осевой линией 256, исполнительный элемент 260 показан в выдвинутом положении 262, как на Фиг.9.
Кожух 254 представляет систему из двух частей, в которой внутренняя часть 282 кожуха разъемно прикреплена к наружной части 284 кожуха. В наружной части 284 кожуха расположен силовой узел 290, включающий электродвигатель 292, например, серводвигатель постоянного тока, который соединен с узлом 294 привода, который может содержать стандартную комбинацию муфты и тормоза или, в альтернативном варианте, так называемый гибкий шлицевой привод без обычных шестерен. Следует иметь в виду, что, в предпочтительном варианте выполнения, двигатель 292 является двигателем постоянного тока, но может быть и двигателем переменного тока. Питание к двигателю 292 подается подводным источником 102 энергоснабжения посредством соединительных линий, например, линии 186. Соединительная втулка 298 подсоединена к узлу 294 привода с одного конца и к шариковой гайке 306 с противоположного конца. Вращающийся вал, в форме шарикового винта 312, подвешен в шариковой гайке 306 и может перемещаться относительно шариковой гайки в осевом направлении 256. Узел 294 привода поворачивает соединительную муфту 298, и вращение передается на шариковую гайку 306, заставляя вращающийся ходовой винт 310 перемещаться относительно шариковый гайки 306.
Датчик 295 положения расположен на наружной концевой части 284 для определения продольного положения вала 310. Датчик 295 положения выступает от концевой части 284 кожуха и расположен внутри съемной крышки 316 датчика, которая прикреплена к концевой части 284 кожуха. Датчик 295 может определить, например, относительное продольное положение вращающегося ходового винта 310, на основании чего он может определить положение исполнительного элемента 260.
На конце, со стороны вращающегося ходового винта 310, исполнительный элемент 260 подсоединен к вращающемуся держателю 338. Из вращающегося держателя 338 радиально выступают два противоположно ориентированных направляющих выступа 342, которые входят в соответствующие направляющие пазы 344 во вращающейся втулке 330, и направляются этими пазами в осевом направлении 256. Будучи сцепленными с направляющими пазами, направляющие выступы заставляют вращающийся держатель 338 и, тем самым, вращающийся ходовой винт 310 и вращающуюся втулку 330, образовывать жесткую связь друг с другом.
Цилиндрическая пружина 318 допускает вращение соединительной втулки 298 в прямом направлении 320, одновременно предотвращая какое-либо вращение в обратном направлении. Вторая цилиндрическая пружина 332 расположена между корпусом 324 и вращающейся втулкой 330. Одним из концов спирали пружина 332 соприкасается с внутренней поверхностью натяжной втулки 356, которая сцеплена с шестерней 362, которая вращается натяжным двигателем 364. Натяжной двигатель 364 расположен между корпусом 324 и кожухом 254 системы, и может управляться независимо от электродвигателя 292 для приложения усилия к натяжной втулке 356. Натяжной двигатель 364 соединен с управляющим и исполнительным узлом 80.
Возвратная пружина 366 в виде торсионной пружины соединена с натяжной втулкой 356 таким образом, что когда натяжной двигатель 364 поворачивает натяжную втулку 356, он также поворачивает возвратную пружину 366, создавая необходимую возвращающую силу для натяжной втулки 365. Комбинация натяжного двигателя 354, натяжной втулки 356, цилиндрической пружины 332 и возвратной пружины 366 образует узел 370 экстренного отключения, который автоматически возвращает исполнительный элемент 260 в отведенное положение 264 в случае отказа электроснабжения в исполнительной системе 250.
В процессе работы, исполнительный элемент 260 сдвигается в направлении 276 сдвига включением электродвигателя 292, который, через посредство узла 294 привода, поворачивает соединительную втулку 298 и шариковую гайку 306. При повороте шариковой гайки 306 вращающийся ходовой винт 310 или шариковый винт 312 смещаются в осевом направлении 256, и, посредством вращающегося держателя 338, сдвигают исполнительный элемент 260 в направлении выдвинутого положения. Соответствующее продольное перемещение вращающегося ходового винта 310 отслеживается позиционным датчиком 295. Как показано на Фиг.2, когда исполнительный элемент 260 находится в выдвинутом положении 262, клапан 252 открыт, обеспечивая разведку или извлечение газа, нефти или аналогичного продукта.
Либо одновременно с работой двигателя 292, либо перед этим, натяжной двигатель 364 поворачивает шестерню 362 и, вместе с ней, натяжную гильзу 356, снимая напряжение с цилиндрической пружины 332 и сжимая возвратную пружину 366. Если на натяжной двигатель 364, выполненный в виде шагового двигателя, подается от управляющего и исполнительного узла 80 соответствующий ток удержания, он будет удерживать свое положение вместе с натяжной втулкой 356. Под действием запасенной энергии возвратная пружина 366 пытается повернуть натяжную втулку 356 обратно, противодействуя удерживающей силе натяжного двигателя 364.
Если исполнительный элемент 260 должен быть сдвинут, удерживающая сила натяжного двигателя 364 снимается соответствующими средствами управления в управляющем и исполнительном узле 80. Этим освобождается цилиндрическая пружина 332, позволяя вращающейся втулке 330, под действием возвратной энергии возвратной пружины 366, поворачиваться в противоположном направлении относительно корпуса 324. Благодаря жесткой связи между вращающейся втулкой 330 и вращающимся ходовым винтом 310, которая обеспечивается направляющими пазами 342 и направляющими выступами 344, вращающийся ходовой винт 310 и шариковая гайка 306 могут менять направление на обратное в сторону электродвигателя 292, в то время как исполнительный элемент 260, присоединенный к вращающемуся ходовому винту 310, сдвигается назад в свое отведенное положение 264 (см. Фиг.9). Главным фактором здесь является возвратная сила, прилагаемая возвратной пружиной 366 к исполнительному элементу 260, поскольку это именно та сила, которая возвращает в исходное положение как исполнительный элемент 260, так и вращающийся ходовой винт 310 поворотом в обратную сторону натяжной втулки 356 и соответствующим вращением цилиндрической пружины 332.
В случае одновременного отказа электроснабжения удерживающая сила в натяжном двигателе 364 исчезает, вызывая аварийное перекрытие исполнительной системы 250 под действием возвратной пружины 366, цилиндрической пружины 332 и натяжной втулки 356. Как было описано выше, возвратная пружина 366 поворачивает назад натяжную гильзу 356, освобождая цилиндрическую пружину 332, так чтобы вращающаяся втулка 330 могла вращаться относительно корпуса 324. Заключительная стадия процесса перекрытия происходит также как и обычно при выполнении перекрытия исполнительной системой 250.
На Фиг.11 приведен вид с торца исполнительной системы 250, показанной на Фиг.10, в направлении концевой части 284 наружного кожуха и крышки 316 датчика. На Фиг.10 представлен вид сечения II-II на Фиг.11. Четыре компенсатора 372, показанные более подробно на Фиг.12, установлены по кругу вокруг датчика положения 295 (см. Фиг.11). На Фиг.12 показано сечение вдоль линии IV-IV на Фиг.11. Компенсаторы 372 расположены в концевой части 284 наружного кожуха по кругу вокруг электродвигателя 292. Эти компенсаторы 372 предназначены для компенсации изменений объема и давления относительно полного заполнения нефтью исполнительной системы 250, то есть они компенсируют изменения объема при пуске системы и флуктуациях температуры. На Фиг.13 и 14 показано, что исполнительная система 250 может также содержать запускаемый извне аварийный исполнительный узел 378 в соответствии с патентной заявкой США серийный №10/276,201, поданной 14 ноября 2002 г. и озаглавленной "Исполнительное устройство", которая претендует на привилегии заявки РСТ/ЕР01/05158, поданной 7 мая 2001 г., которая претендует на приоритет заявки DE 20008414.3, поданной 11 мая 2000 г. (1600-07400; ОТЕ-030297), которые целиком включены в настоящее описание посредством ссылки. Аварийный исполнительный элемент 378 включает вспомогательную цапфу 380 с диаметрально противоположными шпильками 381 для прикрепления снаружи исполнительной системы 250, например, подводного манипулятора или аналогичного инструмента. Вспомогательная цапфа 380 может быть расположена рядом с позиционно-чувствительным датчиком 295. На Фиг.14 показан вид с торца системы 250, в то время как на Фиг.13 показан продольный разрез по линии А-С на Фиг.14.
Как двигатель 292, так и натяжной двигатель 364, содержат вал 382 двигателя или вал 404 натяжного двигателя, выступающий в сторону цапфы 380. На валу 382 двигателя имеется шестерня 388 в виде свободно вращающейся шестерни с тормозным механизмом 390, которые образуют узел 392 направленной муфты. Шестерня 388 свободного вращения входит в зацепление с приводной шестерней 395, которая установлена на одном конце цапфы 380, причем связь между ними обеспечивается установленным между ними скользящим кольцом 394.
Вал 404 натяжного двигателя соединен с накидной гайкой 406, которая закрепляет натяжную шестерню 414. Как можно видеть на Фиг.13, натяжная шестерня 414 вращается при вращении цапфы 380 через посредство приводной шестерни 395 и промежуточной шестерни 418. Поэтому вращением цапфы 380 приводятся во вращение как вал 382 двигателя, так и вал 404 натяжного двигателя. Комбинация вспомогательной цапфы 380, приводной шестерни 395, шестерни 388 свободного вращения, натяжной шестерни 414 и вала 404 натяжного двигателя образуют аварийный исполнительный узел 378, посредством которого, в случае прерывания подачи питания к двигателю 292 или к натяжному двигателю 364, или какой-либо иной помехи в нормальной работе исполнительной системы 250, исполнительный элемент может быть сдвинут в его рабочее положение 276, как это было описано ранее.
Аварийный исполнительный узел 378 и его компоненты остаются в дежурном состоянии при нормальной работе, не требуя какого-либо технического обеспечения, то есть они никуда не перемещаются. При наступлении аварийной ситуации исполнительный элемент 260 должен быть открыт аварийным исполнительным узлом 378, вспомогательная цапфа 380 поворачивается в соответствующем направлении, также, в этом случае, поворачивая двигатель 292 через посредство шестерни 388 свободного вращения и тормозного механизма 390, в результате чего исполнительный элемент 260 сдвигается в свое выдвинутое положение 262, как это описано выше.
В то же время, посредством промежуточной шестерни 418 и натяжной шестерни 414, натяжной двигатель 364 приводится в движение для активизации узла 370 экстренного отключения. Благодаря конструкции узла 370 экстренного отключения, после нескольких сотен оборотов вала 404 натяжного двигателя, цилиндрическая пружина 332 и возвратная пружина 366 натягиваются, и какая-либо передача вращающего момента на натяжной мотор 404 предотвращается.
Если в аварийной ситуации исполнительная система 250 должна быть использована для перекрытия исполнительного элемента 260, вспомогательная цапфа 380 поворачивается в противоположном направлении. Достаточно всего нескольких оборотов для срабатывания узла 370 экстренного отключения. Этот узел 370 срабатывает, как было описано выше, без совместного с ним вращения двигателя 292, поскольку в этом случае снова приводится в действие механизм свободного вращения.
На Фиг.15 изображен один из вариантов выполнения датчика 295 определения положения, описанного в патентной заявке США серийный №10/344,921, поданной 18 февраля 2003 г. и озаглавленной "Способ и устройство для измерения пройденного пути", которая претендует на привилегии заявки РСТ/ЕР01/09513, поданной 17 августа 2001 г., которая претендует на приоритет заявки ЕР 00117841.7, поданной 18 августа 2000 г. (1600-07700; ОТЕ-030305), которые целиком включены в настоящее описание посредством ссылки. Для определения положения управляющего элемента относительно корпуса в случае взаимного расположения такого устройства управления линейным перемещением и корпуса, один конец управляющего элемента может быть соединен с пружинным элементом, который своим концом, противоположным управляющему элементу, соединен с устройством измерения силы, которое передает электрический сигнал, соответствующий силе, сообщаемой пружинным элементом устройству измерения силы, к измерительному устройству. Это означает, что устройство управления линейным перемещением отличается тем, что устройство измерения пройденного пути встроено в него. Соответственно, устройство измерения пройденного пути в устройстве управления линейным перемещением может иметь те же признаки, что и описанный ниже датчик определения положения. В случае добычи нефти и газа, используется ряд устройств управления линейным перемещением. Такие устройства управления линейным перемещением используются в частности, для управления клапанами, дроссельными устройствами и т.п., используемыми в нефте- и газодобыче, и имеют, по крайней мере, один управляющий элемент, установленный внутри корпуса с возможностью линейного перемещения, и связанное с ним приводное устройство. Управляющим элементом может быть шариковый ходовой винт, который установлен в соответствующей гайке с возможностью поворота. Гайка подвижно соединена с соответствующим приводным устройством и преобразует придаваемое ей вращательное движение в продольное движение шарикового ходового винта.
Позиционно-чувствительный датчик 295 имеет простую, прочную и надежную конструкцию и особенно подходит для использования в недоступных местах. Например, одной из областей применения позиционно-чувствительного датчика 295 является линейный исполнительный элемент 260 в устройстве для нефте- и газодобычи. Соответствующие устройства представляют собой так называемые исполнительные элементы, противовыбросовые устройства, клапаны и т.п., необходимые в нефте- и газодобыче. В этом случае, область применения позиционно-чувствительного датчика 295 не ограничена только использованием на суше, но, благодаря нечувствительности к воздействию давления или иных неблагоприятных воздействий окружающей среды, он также может применяться и под водой. Это, в равной мере, относится и к подземному применению.
На Фиг.14 также показан позиционно-чувствительный датчик 295, установленный под вспомогательной цапфой 380, и функционально соединенный с валом 382 электродвигателя 292, который может вращаться в направлении прямого направления вращения 320. Рядом с датчиком 295 положения, в той же нише в корпусе двигателя или концевой части 284, расположен штепсельный соединитель 384 для соединения соединительной линии 186, по которой могут передаваться данные на позиционно-чувствительный датчик 295 и исполнительную систему 250, либо приниматься данные от них, и передаваться мощность для питания узла 290. На Фиг.15-17 в увеличенном масштабе изображен позиционно-чувствительный датчик 295, в качестве примера устройства измерения пройденного пути, в соответствии с настоящим изобретением. Позиционно-чувствительный датчик 295 установлен в устройстве 450 линейного привода, которое имеет, по крайней мере, один рабочий элемент 452, который может двигаться вперед и назад в продольном направлении 256. В предпочтительном варианте выполнения, рабочий элемент 452 представляет собой шариковой ходовой винт, который установлен так, что может вращаться в шариковой гайке вращения. Во время вращения шариковый гайки вращения посредством приводного устройства 450, показанного на Фиг.15 только частично, происходит соответствующее вращение рабочего элемента 452 и движение рабочего элемента 452 в продольном направлении 256, как результат вращения относительно шариковой гайки вращения в продольном направлении 256.
Рабочий элемент 452 соединен одним концом 454 (см. Фиг.15) с пружинным элементом 456 позиционно-чувствительного датчика 295. Пружинный элемент 456 вводится в трубку 458 приводным устройством 450 и соединен своим концом, противоположным рабочему элементу 452, с соответствующим устройством 460 измерения силы, выполненного в форме электрического измерительного проводника. Сила, прилагаемая рабочим элементом 452 к пружинному элементу 456 посредством устройства 460 измерения силы или соответствующим электрическим измерительным проводником, преобразуется в соответствующее напряжение.
Пружинный элемент 456 может быть выбран таким образом, что он расширяется пропорционально приложенной удерживающей силе, при этом упрощается оценка сигнала устройства 460 измерения силы и, соответственно, определение перемещения или положения исполнительного элемента 260.
Поскольку пружинный элемент, как правило, обладает мягкой характеристикой демпфирования, соответствующие вибрации, удары и подобные воздействия передаются, не оказывая воздействия на устройство 460 измерения силы.
Подобный пружинный элемент 456 может быть выбран с соответствующими постоянными пружины, из соответствующего материала и пр., в зависимости от требований. Исполнительный элемент 260 может перемещаться только на небольшое расстояние из-за его соединения с пружинным элементом 456 и, через его посредство, с устройством 460 измерения силы. По сути дела, диапазон перемещения определяется пружинным элементом 456 и максимальным расширением, им определяемым.
Пружинный элемент может следовать искривленному, например, круговому пути движения объекта, и, соответственно, может быть определено положение движущегося объекта вдоль этого пути.
Устройство 460 измерения силы может включать ряд электропроводных проводников, которые изменяют свое сопротивление в зависимости от приложенной к ним силы. Это означает, что изменение сопротивления электропроводящего проводника соответствует силе, передаваемой пружинным элементом 456, а сила пропорциональна изгибу пружинного элемента 452 и, таким образом, положению при продольном перемещении исполнительного элемента 260.
Проводники устройства 460 измерения силы расположены параллельно друг другу и могут быть включены также параллельно или даже последовательно. Проводники образуют резистор, который является частью мостовой схемы, показанной на Фиг.18. Дополнительный резистор 462 в этой мостовой схеме также образован несколькими электропроводными проводниками, и этот дополнительный электрический резистор 462 соответствует по сопротивлению, создаваемому электропроводными проводниками устройства 460 измерения силы и используется для температурной компенсации.
Для упрощения определения изменений сопротивления в подобном электрическом проводнике, электрический проводник 460 может быть включен в мостовую схему, например, в так называемый мост Уитстона, и образовать, по крайней мере, один резистор в мостовой схеме для прецизионных измерений, которые возможны при использовании такой схемы, благодаря чему достигается высокая точность измерения положения исполнительного элемента 260.
Для компенсации изменений сопротивления проводника 460 под влиянием температуры, с тем, чтобы эти изменения не приводили к ошибкам в определении положения движущегося объекта, в мостовую схему может быть включен дополнительный резистор, аналогичный резистору, образованному устройством 460 измерения силы. Например, если устройство 460 измерения силы выполнено из нескольких проводников, этот дополнительный резистор выполняется аналогичным образом. Конечно, в отличие от устройства 460 измерения силы, этот резистор не подвергается воздействию соответствующей растягивающей силы со стороны пружинного элемента 456.
Для того чтобы скомпенсировать определенные случайные неоднородности в проводнике, например колебания диаметра, изменения свойств материала и т.д. в проводнике 460 наиболее простым путем, проводник 460 выполняется из большого числа электропроводных проводников, расположенных параллельно друг другу. При этом определяются соответствующие случайные отклонения отдельных проводов, и достигается высокая точность во всем диапазоне измерений устройства 460 измерения силы.
Провода могут представлять собой отдельные провода, либо могут быть выполнены из одного провода, проложенного меандром.
Устройство 460 измерения силы имеет, по крайней мере, один электропроводный проводник, в частности, в виде провода, электрическое сопротивление которого зависит от силы, приложенной к нему в продольном направлении. Подобный проводник также может быть выполнен из различных материалов, которые выбираются, например, в соответствии с условиями окружающей среды, при которых используется позиционно-чувствительный датчик 295. Таким путем позиционно-чувствительный датчик 295 может быть использован в агрессивной среде, под водой, при повышенном давлении, в условиях вакуума и пр., практически без каких-либо ограничений. В силу простоты конструкции позиционно-чувствительного датчика 295 не происходит износа или истирания отдельных частей, поэтому срок службы очень высок.
Поскольку электрический проводник 460 в качестве устройства для измерения силы изменяет свое электрическое сопротивление под воздействием на проводник соответствующей растягивающей силы, это изменение сопротивления может быть обнаружено благодаря соответствующим изменениям напряжения или тока и оценено по сигналу в вычислительном устройстве 468.
Соответствующим образом может быть выполнено устройство 460 измерения силы для преобразования растягивающей силы, создаваемой пружинным элементом 456, в электрический сигнал. Может быть представлен простой пример такого устройства 460 измерения силы, в котором имеется, по крайней мере, один электрический измерительный проводник, электрическое сопротивление которого изменяется в зависимости от силы, прикладываемой к измерительному проводнику.
К резисторам, образованным проводами, подключены корректирующее устройство 464 и усилитель. Соответствующие сигналы от усилителя 466 могут выдаваться выходным узлом вычислительного устройства 468, причем в этом случае вычислительное устройство может иметь дифференцирующую цепь, посредством которой изменяющиеся во времени величины, соответствующие положениям исполнительного элемента, могут быть подвергнуты дифференцированию и, таким образом, может быть определена скорость и, в данном случае, ускорение исполнительного элемента.
Нулевая точка отклонения пружинного элемента 456 пружины может быть установлена корректирующим устройством 464. Например, пружины могут иметь предварительное натяжение от 2% до 5% для того, чтобы создать подобную регулируемую нулевую точку для перемещения исполнительного элемента 260. Величины напряжения, ассоциирующиеся с таким состоянием предварительного натяжения, устанавливаются равными нулю посредством корректирующего устройства 464. Для питания проводов и вычислительного устройства подключается источник питания.
В случае устройства управления линейным перемещением, управляющий элемент которого перемещается линейно вперед за счет движения винта, важно, чтобы соответствующий поворот управляющего элемента не передавался пружинному элементу, и, тем самым, не приводил к напряжению или появлению силы в пружинном элементе, которая не вызвана линейным перемещением управляющего элемента. С этой целью, например, по крайней мере, соединитель между пружинным элементом и управляющим элементом могут иметь вращающееся развязывающее устройство. Только линейное перемещение управляющего элемента передается на пружинный элемент посредством этого развязывающего вращательного элемента, а вращение передается только этому развязывающему вращательному устройству. Пружинный элемент 456, в соответствии с Фиг.15-18 присоединен через соединители 470, 472 к управляющему элементу 452, соответственно посредством электрического измерительного проводника 460. Соединитель 470 представляет собой развязывающее вращательное устройство 468. Развязывающее вращательное устройство 468 предотвращает передачу вращения рабочего элемента 452, выполненного в виде шарикового ходового винта, к пружинному элементу 456. Развязывающее вращательное устройство 468 может быть выполнено в виде винта, который ввинчивается в конец рабочего элемента 452 и который закреплен с возможностью вращения в соединителе 470, но не в продольном элементе пружинного элемента 456. Фиг.16 представляет собой увеличенный фрагмент "X" на Фиг.15, а фиг.17 представляет увеличенный фрагмент "Y" на Фиг.15.
Соединение пружинного элемента 456 с соединителем 472 более подробно показано на Фиг.16. Он соединен с электрическим измерительным проводником 460, который прикреплен к его концу, противолежащему пружинному элементу 456, в заданной точке корпуса 474 устройства 476 управления линейным перемещением. Соответствующие соединительные провода присоединены к электрическому измерительному проводнику 460 посредством паяных контактов, и ведут к мостовой схеме 480 (см. Фиг.18). Для того чтобы можно было обнаружить соответствующие изменения сопротивления, связанные с изменениями напряжений, электрический измерительный проводник 460 может быть соединен в виде резистора в мостовую схему, так называемый мост Уитстона.
Согласно изобретению, при использовании мостовой схемы и электрических проводящих проводов 460 в качестве устройства измерения силы, получается простая электрическая конструкция, для которой необходимы простые средства вычислительного узла 468. Например, усилитель 466 и/или дифференциальная схема и/или вычислительное устройство 468, соединенные с микропроцессором или подобным устройством, являются единственно необходимыми электронными компонентами. Дифференцирующее устройство может быть исключено, если, например, определения скорости или ускорения исполнительного элемента 260 при его движении не требуется. Кроме того, используются и другие виды вычислительных устройств, при наличии соответствующего программного обеспечения.
Полученные сигналы передаются на вычислительное устройство 468 с мостовой схемы 480 посредством усилителя 466 для дальнейшей обработки. Одна ветвь мостовой схемы заземлена (см. "О"), а другая ветвь подключена к плюсовому полюсу источника напряжения.
В процессе работы, линейное перемещение исполнительного элемента 260 может быть измерено по удерживающей силе, развиваемой пружинным элементом 456 при движении исполнительного элемента 260. Эта сила, конечно, настолько мала, что она не мешает, либо слабо мешает необходимому движению элемента 260. Удерживающая сила, развиваемая пружинным элементом 456, передается на электрический проводник в устройстве 460 измерения силы. Электрический проводник 460 имеет, например, несколько проводов, величина сопротивления которых меняется в случае приложении растягивающей силы вдоль проводов. Изменение величины сопротивления определяется соответствующим изменением падения напряжения на резисторе, причем изменение сопротивления и изменение соответствующего напряжения определяется приложенной силой. Если сила, приложенная пружинным элементом 456 к исполнительному элементу 260, определяется из изменения сопротивления путем соответствующих вычислений, отклонение пружины 456 и, таким образом, положение исполнительного элемента 260, может быть определено просто по величине силы, если соответствующий параметр (постоянная пружины) пружинного элемента 456 известен.
Исполнительный элемент 260 перемещается, преодолевая сопротивление упруго растягиваемого удерживающего элемента 456, вдоль практически линейного пути, при этом удерживающая сила, проявляющаяся в удерживающем элементе 456, измеряется относительно пути, пройденного исполнительным элементом 260, а сигнал, соответствующий удерживающему элементу 456, передается от устройства 460 измерения силы к вычислительному устройству 468, где и определяется путь, проделанный исполнительным элементом 260 в соответствии с удерживающим элементом 456.
Пружинный элемент 456 расширяется при движении исполнительного элемента 260, причем удерживающая сила, возникающая в пружинном элементе, в простейшем случае прямо пропорциональна пути, проделанному исполнительным элементом 260. Удерживающая сила передается через пружинный элемент 456 на устройство 460 измерения силы и там измеряется. Соответствующий электрический сигнал, который соответствует удерживающей силе и, тем самым, пути, пройденному исполнительным элементом 260, принимается вычислительным устройством 468, соединенным с устройством 460 измерения силы.
Компоненты, используемые для позиционно-чувствительного датчика 295, имеют простую и экономичную конструкцию. В этих компонентах не происходит износа, поскольку, например, здесь отсутствует трение между компонентами, и между компонентами и другими объектами. Работа позиционно-чувствительного датчика 295 не зависит от среды, в которой он находится, условий на объекте, вибраций, ударов и др.
На Фиг.19-21 схематически показано исполнительное устройство 480 с двойным резервированием для пуска исполнительной системы 250. Исполнительное устройство 480 с двойным резервированием выполнено в соответствии с патентной заявкой США серийный №10/415, 419, поданной 29 марта 2003 г. и озаглавленной "Исполнительное устройство", которая претендует на привилегии заявки РСТ/ЕР01/12551, поданной 30 октября 2001 г., которая претендует на приоритет заявки DE 20018564.0, поданной 30 октября 2000 г. (1600-08200; ОТЕ-030327), которые целиком включены в настоящее описание посредством ссылки. Исполнительное устройство 480 с двойным резервированием включает силовой узел 290, имеющий два отдельных электродвигателя 292а и 292b. В предпочтительном варианте выполнения, электродвигатели 292 представляют собой серводвигатели постоянного тока и оба используются, при необходимости, независимо друг от друга для вращения вала 382 привода. Как хорошо показано на Фиг.20-21, при вращении вала 382 привода, вращающийся ходовой винт 310 смещен в направлении 482 регулировки, а исполнительный элемент 260, подсоединенный к нему, также смещен. Исполнительный элемент 260 используется, например, для закрывания или открывания клапана, когда управляющее устройство 252, показанное на Фиг.9, приводится в действие исполнительным устройством 480 исполнительной системы 250 с двойным резервированием.
Серводвигатели 292а, 292b каждый могут быть электрически соединены со специальным устройством 484 или 486 управления двигателями. Эти устройства 484, 486, соответственно, содержат микропроцессор, устройство памяти и другие компоненты, необходимые для управления, например, контроллер 112. Соответствующее программное обеспечение для управления серводвигателями 292а, 292b хранится в устройствах 484, 486 управления двигателями. Каждый из электрических двигателей 292 могут управляться по отдельности и, по существу, независимо друг от друга.
Каждое из устройств 484, 486 управления моторами может быть по отдельности подключено к исполнительному устройству 480 с двойным резервированием посредством подходящих соединителей 487, 488 (см., например, Фиг.20). Кроме того, каждое из устройств 484, 486 подключено к подходящему источнику питающего напряжения, например, источнику 102. Для независимой подачи на двигатели 292 исполнительного устройства 250 электропитания, на корпусе 254 и, особенно, на крышке 490 корпуса вблизи электродвигателей 292, установлены, по крайней мере, два отдельных электрических соединителя 487, 488. Подача соответствующего напряжения питания, вместе с обменом данными или обменом сигналами команд может осуществляться через эти электрические соединители 487, 488. Каждый из электрических соединителей 487, 488 может быть использован для одного из электромоторов 292, то есть сервомоторов. В данном случае также возможно, чтобы каждый из электрических соединителей 487, 488 был закреплен за шаговым двигателем 364. Дополнительной возможностью может быть также использование отдельных электрических соединителей для шаговых двигателей 364.
В соответствии с изобретением имеется возможность того, что два электродвигателя 292 могут управляться независимо друг от друга для независимого вращения вала 382 привода. В этом случае, целесообразно включать один из электродвигателей 292 на холостом ходу, в то время как другой приводит во вращение вал 382 привода.
Для того, однако, чтобы иметь возможность, при необходимости, передать на вал 382 привода более высокий вращающий момент и, тем самым, сместить исполнительный элемент 260 в направление 482 регулирования с большей силой, требуется одновременное включение обоих электродвигателей 292 (серводвигателей).
В этом случае, для того, чтобы предотвратить вращение вала 382 привода двигателями 292 с фазовым рассогласованием вследствие, например, различных характеристик двигателя или из-за отдельных источников питания для обоих двигателей 292, вместо обеспечения их взаимодействия при совместной работе, серводвигатели 292 могут быть специально синхронизированы программным путем посредством связанных с двигателями устройствами 484, 486 управления.
Может использоваться простой способ синхронизации и управления, состоящий в том, что один серводвигатель 292 используется как ведущий, а другой как ведомый.
Такое решение представляется полезным, особенно для передачи высоких вращающих моментов, в том случае, когда каждый из серводвигателей является двигателем постоянного тока.
На Фиг.20 показан вид спереди крышки 490 корпуса 284 устройства (см. Фиг.21) исполнительного устройства 480 с двойным резервированием согласно изобретению. Крышка 490 корпуса также может быть концом части корпуса (см., например, Фиг.21), которая может сниматься или надеваться на остальную часть корпуса 254.
В крышке 490 корпуса установлены соединители 487, 488 для электропитания и управления серводвигателями 292а, 292b. Крышка 492 меньшего размера установлена в центре крышки 490 корпуса, причем меньшая крышка 492 закрывает цилиндрический выступ на крышке 490 корпуса (см. Фиг.21), в котором находится датчик 295 положения.
Для контроля работы исполнительного устройства 250 согласно изобретению, особенно в случае его удаленности от упомянутого исполнительного устройства 250, датчик 295 положении может быть соединен с валом 382 привода. Посредством датчика 295 можно определить, например, насколько далеко был сдвинут исполнительный элемент 260, вернулся ли он в исходное положение и пр.
На Фиг.21 показано сечение вдоль линии IV-IV, показанной на Фиг.20, с добавлением соединителя 488.
Два серводвигателя 292а, 292b привода 290 установлены вдоль продольного направления 276 вала 382 привода один за другим. Вал 382 привода выступает рядом датчиком 295 положения. Датчик 295 используется для измерения поворота вала 382 привода и, тем самым, определения подачи исполнительного элемента 260 в направлении 482 регулирования. Особая простота и компактность конструктивного решения состоит в том, что электрические двигатели 292 установлены один за другим в продольном направлении 276 вала 382 привода.
Вал 382 привода заканчивается в трансмиссии 494, которая, например, может представлять собой так называемую коробку передач с гибким шлицевым приводом без классических шестерен. Вращающаяся втулка 496 вращается валом 382 привода через трансмиссию 494, причем вращающаяся втулка 496 в своем вращении жестко соединена с шариковой гайкой 306 как частью подающего устройства 314. Другая часть подающего устройства 314 образуется вращающимся ходовым винтом 310, который представляет собой рециркулирующий шариковый ходовой винт.
Головка 340 ходового винта установлена с одного конца вращающегося ходового винта 310, выступая от шариковой гайки 306. Исполнительный элемент 260 присоединен к головке 340 вала со стороны, противоположной вращающемуся ходовому винту 310. Вращающаяся втулка 496 установлена в шарикоподшипнике 358, где она может вращаться относительно удерживающей втулки 326, которая окружает вращающуюся втулку 496. Вращающаяся втулка 496 вставлена в кольцевой фланец 300 своим концом, обращенным к трансмиссии 494.
Для того чтобы предотвратить противодействие электродвигателям 292 со стороны устройств 484, 486 управления, на которые воздействует сила в направлении, противоположном направлению 482 регулирования, через посредство исполнительного элемента 260 и вращающегося ходового винта 310, или рециркулирующего шарикового ходового винта, вращающаяся втулка 496 может быть зафиксирована первой цилиндрической пружиной 318, противодействующей направлению вращения подачи на кольцевом фланце 300, который ротационно-жестко укреплен в корпусе 254. Направление вращения подачи совпадает в данном месте с вращением рециркулирующего шарикового ходового винта для регулирования исполнительного элемента 260 или вращающегося ходового винта 310 в направлении 482 регулирования. Для того чтобы обеспечить возвращение исполнительного элемента 260 в исходное положение в направлении, противоположном направлению 482 регулирования, даже, несмотря на отказ управления исполнительным устройством 250, удерживающая втулка 326 может быть ротационно-жестко соединена одним своим концом с поперечной стенкой 296, в то время как другим своим концом удерживающая втулка ротационно-жестко соединена посредством цилиндрической пружины 332 с направляющей втулкой 330 в направлении, противоположном направлению вращения подачи, причем исполнительный элемент 260, соединенный с рециркулирующим шариковым ходовым винтом, удерживается для продольного перемещения, но без возможности вращения, в направляющей втулке 330. Если эта вторая цилиндрическая пружина 332 освобождается при отказе обычного управления в исполнительном устройстве 250, направляющая втулка 330 может повернуться в направлении, противоположном направлению вращения подачи под действием силы, которая передается через исполнительный элемент 260, и которая действует на приводимое в действие устройство 252 управления. Посредством этого вращения вращающийся ходовой винт 310 поворачивается обратно в рециркулирующей шариковой гайке 306 также в направлении, противоположном направлению 482 регулирования до тех пор, пока исполнительный элемент 260 снова не займет свое исходное положение. Учитывая это, для того, чтобы предотвратить вращение самого исполнительного элемента 260 при его смещении в направлении, противоположном направлению 482 регулирования, между исполнительным элементом 260 и рециркулирующим шариковым ходовым винтом может быть установлена головка 340 ходового винта. Исполнительный элемент 260 посредством этой головки 340 ходового винта разъединяется в отношении вращения с рециркулирующим шариковым ходовым винтом.
Для того чтобы достаточно сильно взвести вторую цилиндрическую пружину 332, обжимающую удерживающую втулку 326 и направляющую втулку 330 для достижения ротационно-жесткого соединения, пружина 332 может быть соединена для вращения с, по крайней мере, одним электродвигателем 292. Достаточно ротационно-жесткое соединение между удерживающей втулкой 326 и направляющей втулкой 330 обеспечивается включением электрического двигателя 292 для закручивания цилиндрической пружины 332, особенно перед регулированием рециркулирующего шарикового ходового винта и исполнительного элемента 260.
Для того чтобы можно было направлять и удерживать головку 340 ходового винта относительно направляющей втулки 330, как это было упомянуто выше, головка 340 может содержать, по крайней мере, один направляющий элемент 497, выступающий по радиусу наружу, который входит в зацепление с продольным направляющим устройством 499, проходящим в направляющей втулке 330 в направлении 482 регулирования.
Для того чтобы сохранялась возможность освободить вторую цилиндрическую пружину 332 при отказе обоих электродвигателей 363, между обжимной втулкой 499 и кольцевым фланцем 336 может быть установлена торсионная пружина 366, причем торсионная пружина 366 может быть затянута при вращении зажимной втулки 499 для закручивания второй цилиндрической пружины 332. Если, в результате, обжимная втулка 499 больше не удерживается одним из электродвигателей 364 при отказе его электроснабжения в таком положении, при котором взводится вторая цилиндрическая пружина 332, торсионная пружина 366 вращает назад обжимную втулку 499, по крайней мере, настолько, чтобы вторая цилиндрическая пружина 332 ослабла для освобождения ротационно-жесткой связи между удерживающей втулкой 326 и направляющей втулкой 330.
Для того чтобы обеспечить точное управление вращением обжимной втулки 499, в качестве первого и второго электрических двигателей 364а, 364b могут использоваться шаговые двигатели. Электродвигатели 292 и 364 могут питаться как от постоянного, так и от переменного напряжения, однако питание постоянным напряжением предпочтительнее.
Первая цилиндрическая пружина 318 закручивается снаружи кольцевого фланца 300 и вращающейся втулки 496. Пружина 318 используется для обеспечения ротационно-жесткого соединения кольцевого фланца 300 и вращающейся втулки 496 в направлении вращения, противоположном направлению вращения подачи вращающейся втулки 496, то есть, в направлении вращения, при котором как вращающийся ходовой винт 310, так и исполнительный элемент 260 смещены в направлении 482 регулирования. Кольцевой фланец 300 выступает от поперечной стенки 296, по существу, коаксиально валу 382 привода в сторону вращающегося ходового винта 310. Стенка 296 установлена в области корпуса 254, где она прикреплена к части корпуса 284 с возможностью снятия.
Удерживающая втулка 326а ротационно-жестко соединена с поперечной стенкой 296, располагаясь по радиусу снаружи относительно кольцевого фланца 300. Ротационно-жесткое соединение обеспечивается привинчиванием одного конца удерживающей втулки 326а к поперечной стенке 296. Удерживающая втулка 326а проходит до ее конца, который обращен от поперечной стенки 296. Удерживающая втулка 326а размещена с возможностью вращения относительно направляющей втулки 330 на этом упомянутом конце посредством шарикоподшипника 258. Вторая цилиндрическая пружина 332 навита с наружных поверхностей как удерживающей втулки 326а, так и направляющей втулки 330.
Направляющая втулка 330 проходит до крышки 334 корпуса, сквозь которую проходит исполнительный элемент 260. На направляющей втулке 330 имеются продольные направляющие 497, вытянутые вдоль направления 482 регулирования, в зацепление с которыми входят направляющие элементы 498. Направляющие элементы выступают по радиусу наружу от головки 340 ходового винта.
В области продольных направляющих 497 направляющая втулка 330 вставлена в кольцевой фланец 336, который выступает из внутренней стороны крышки 334 корпуса. Обжимная втулка 499 закреплена и может вращаться в соответствующих подшипниках с наружной стороны кольцевого фланца 336 и с наружной стороны удерживающей втулки 326. Обжимная втулка 499 своим концом, обращенным к приводному устройству 290, привинчена к зубчатому кольцу 491, с которого может быть снята. У зубчатого кольца 491 имеются внутренние зубья, образующие систему 493 зубьев, которая входит в зацепление с зубчатыми колесами 362а, 362b. Зубчатое колесо 362а может приводиться во вращение первым электродвигателем 364а, а другое зубчатое колесо 362b - вторым электродвигателем 364b. В предпочтительном варианте выполнения, в качестве электродвигателей используются шаговые двигатели. Для того чтобы разместить нужный электродвигатель 364 в подходящем месте внутри корпуса 254, электродвигатель 364 должен иметь приводное соединение с обжимной втулкой 499, из которой по радиусу внутрь выступает упор 495, который может иметь подвижное соединение с одним концом второй цилиндрической пружины 332. Благодаря конфигурации обжимной втулки 499, электродвигатель 292 может быть установлен вдали от второй цилиндрической пружины 332. Таким образом, в предпочтительном варианте выполнения, компоновка обеспечивает оптимальное использование пространства в корпусе 254.
Для обеспечения компактности конструкции исполнительного устройства 250 обжимная втулка 499 расположена и может вращаться на наружной поверхности удерживающей втулки 326, и наружной поверхности удерживающей втулки 326, и наружной поверхности кольцевого фланца 336, который соединен с корпусом 254, где кольцевой фланец 336 выступает от внутренней стороны крышки 334 корпуса.
В приводном соединении простой конструкции между электродвигателем 364а и обжимной втулкой 499, электродвигатель 364а вращает зубчатое колесо 362, которое сцеплено с зубьями, главным образом, на одном конце обжимной втулки 499.
Для обеспечения резервирования при приведении в действие обжимной втулки 499, может быть использован другой электродвигатель 364b, установленный диаметрально противоположно первому электродвигателю 364а, и посредством которого может приводиться во вращение зубчатое колесо, которое находится в зацеплении с приводимыми в движение зубьями. Таким образом, обжимная втулка 499 может приводиться во вращение либо первым, либо вторым электродвигателями 364а, 364b, когда, в случае отказа одного электродвигателя, используется другой.
Упор 495 выступает радиально внутрь приблизительно по центру в сторону обжимной втулки 499, и упор 495 может соединяться с одним концом второй цилиндрической пружины 332, поэтому, при вращении вращающейся втулки 496, вторая цилиндрическая пружина 332 может в большей или меньшей степени наматываться на удерживающую втулку 326 и направляющую втулку 330.
Между обжимной пружиной 499 и кольцевым фланцем 336 установлена торсионная пружина 366. Пружина 366 может быть зажата между кольцевым фланцем 336 и вращающейся втулкой 496, когда обжимная втулка 499 вращается, закручивая вторую цилиндрическую пружину 332.
Далее приводится описание работы исполнительного устройства 480 в соответствии с Фиг.19-23.
Поскольку серводвигатели 292а, 292b установлены на валу 382 привода, они могут быть использованы как по одиночке, так и вместе. По одному они используются в тех случаях, когда один из серводвигателей 292а, 292b должен заменять другой серводвигатель. Совместное включение обоих серводвигателей 292а, 292b требуется в том случае, когда к валу 382 привода нужно приложить более высокий крутящий момент, что означает удвоение крутящего момента по сравнению с одним серводвигателем.
Оба серводвигателя 292а, 292b соединены посредством отдельных соединителей 487, 488 питающих кабелей и частично показанной соединительной линии 489 с соответствующими устройствами 484, 486 управления двигателями. Один из серводвигателей 292а, 292b, или оба двигателя, могут приводиться в действие и управляться посредством этих устройств управления и отдельных источников питания для устройств 484, 486 управления двигателями, и также для серводвигателей 292а, 292b. Устройства 484, 486 управления двигателями используют, главным образом, то, что один из серводвигателей 292а, 292b соединен как ведущий и ведомый, и синхронизация обоих двигателей для совместного вращения вала 382 привода обеспечивается программным путем.
Электродвигатели 364а, 364b, выполненные в виде шаговых двигателей, также устанавливаются парами, для обеспечения замены одного из шаговых двигателей при отказе, повреждении или аналогичной ситуации. Также в этом случае, управление шаговыми двигателями 364а, 364b происходит независимо друг от друга по отдельным кабелям питания 487, 488, и отдельными устройствами 484, 486 управления двигателями.
Использование, по крайней мере, двух электродвигателей 292а, 292b дает гарантию того, что, в случае отказа одного из двигателей, другой будет продолжать вращение вала 382 привода для перемещения вращающегося ходового винта 310 и исполнительного элемента 260, соответственно, в направлении 482 регулирования. Число всех остальных частей исполнительного устройства 250 остается прежним, удваивается только число электродвигателей 292. В соответствии с изобретением, нет необходимости в использовании второго вала привода, на который воздействует второй электродвигатель, и посредством которого он управляет вращающимся ходовым винтом 310 и исполнительным элементом 260. В результате, общие размеры исполнительного устройства, в соответствии с изобретением, остаются, по существу, неизменными по сравнению с описанным ранее исполнительным устройством 250. С другой стороны, если, при необходимости, требуется более высокий крутящий момент, оба двигателя используются одновременно.
Если, при отказе обоих шаговых двигателей 364а, 364b, становится невозможным освобождение второй цилиндрической пружины 332, освобождение второй цилиндрической пружины 332 осуществляется торсионной пружиной 366, которая была взведена при закручивании второй цилиндрической пружины 332 для получения ротационно-жесткого соединения направляющей втулки 330 и удерживающей втулки 326а между обжимной втулкой 499 и кольцевым фланцем 336.
В остальном, исполнительное устройство 250, в соответствии с изобретением, функционирует следующим образом. Шариковая гайка 306 вращается внутри вращающейся втулки 496 под действием вращающегося вала 382 привода. Поскольку положение шариковой гайки 306 относительно корпуса 254 в осевом направлении зафиксировано, вращающийся ходовой винт 310 смещается в направлении 482 регулирования при вращении шариковой гайки 306. Исполнительный элемент 260 также смещается вместе с вращающимся ходовым винтом 310, поскольку исполнительный элемент соединен с вращающимся ходовым винтом 310 посредством головки 340 ходового винта. Смещение исполнительного элемента 260 может быть измерено посредством датчика положения 295.
В опорном механизме, обеспечивающем вращение с высокой эффективностью и высоким качеством, который в то же время может легко реверсироваться, вращающаяся втулка 496 может приводиться в движение посредством вала привода через трансмиссию 494, при этом вращающаяся втулка 496 ротационно-жестко соединена с шариковой гайкой 306 подающего устройства 314, в котором вращающийся ходовой винт 310, выполненный в виде рециркулирующего шарикового ходового винта для движения в направлении регулирования, закреплен, с возможностью вращения, в шариковой гайке 306. Таким путем движущая сила электродвигателей 292 передается к шариковой гайке 306 посредством вращающейся втулки 496. Шариковая гайка 306 вращается вместе с вращающейся втулкой 496 и при соответствующем вращении, рециркулирующий шариковый ходовой винт 310 смещается в направление 482 регулирования, и, вместе с ним, также и исполнительный элемент 260. Также возможно, что вместо описанного ранее привода с шариковым винтом, возможно использование аналогичным образом привода с роликовым винтом.
Сила, приложенная к исполнительному элементу 260 с направления устройства 484, 486 управления, которые не показаны, в направлении, противоположном направлению 482 регулирования, передается посредством первой цилиндрической пружины 318 от вращающейся втулки 496 к кольцевому фланцу 300 и, тем самым, к корпусу 254.
Для установки в исходное положение исполнительного элемента 260 в направлении, противоположном направлению 382 регулирования, вторая цилиндрическая пружина 332 освобождается посредством упора 495, при этом цилиндрическая пружина 332 удерживает направляющую втулку 330 с удерживающей втулкой 362а ротационно-жестко в направлении, противоположном направлению вращения подачи. При освобожденной второй цилиндрической пружины 332, направляющая втулка 330 может вращаться в направлении, противоположном направлению вращения подачи, при этом вращение на направляющую втулку 330 передается через направляющие элементы 497 головки 340 ходового винта соответственно обратному вращению вращающегося ходового винта 310. На Фиг.22 представлено другое электрическое устройство 46, а именно инжекционный клапан 500 с электроприводом, имеющий изолирующее устройство 501 и инжекционный клапан 502, в соответствии с описанным в патентной заявке США серийный №10/415,696, поданной 30 октября 2001 г. и озаглавленной "Изолирующее устройство", которая претендует на привилегии заявки РСТ/ЕР01/12548, поданной 30 октября 2001 г., которая претендует на приоритет заявки DE 20018562.4, поданной 30 октября 2000 г. (1600-08700; ОТЕ-030329), которые целиком включены в настоящее описание посредством ссылки. Изолирующее устройство 501 содержит корпус 503, выполненный из различных соединенных друг с другом частей 547, 548, 549, 550 корпуса. В части 547 корпуса размещено устройство 505 привода, включающее два электродвигателя 509 и 510, установленные по обоим концам червячного вала 519, на котором имеется червяк 517. В части 547 корпуса также может находиться устройство 526 экстренного отключения, которое может приводиться в действие другим электродвигателем 532. Соединитель 514 и соединительная линия 186 соединяют двигатели 509 и 510 с удаленными устройствами 512 и 513 управления или контроллером 112. Электромоторы 509, 510, 532 могут питаться как постоянным, так и переменным напряжением, в предпочтительном варианте - постоянным напряжением. На Фиг.23 показано сечение вдоль линии II-II на Фиг.22, включающее инжекционный клапан 502 с соответствующим корпусом 561 инжекционного клапана. Инжекционный клапан 502 прикреплен к изолирующему устройству 501 посредством втулки 580 с резьбой, и содержит соединительную линию 562, обеспечивающую связь текучей средой между насосом 563 текучей среды и шаровым клапаном 586 клапанного узла 564. Изолирующий запорный клапан 507 взаимодействует с соединительной линией 562, в результате чего разрывается соединение между насосом 563 и клапанным узлом 564. Смещением изолирующего запорного клапана 507 из изолирующего устройства 501 сдвигается отверстие 585 золотника изолирующего запорного клапана 507, которое совмещается с соединительной линией 562, что обеспечивает связь текучей средой по соединительной линии 562.
Изолирующий запорный клапан 507 установлен на конце рабочего элемента 506, который находится внутри корпуса поршня 571 и соединен с секцией 572 вала. Корпус 571 поршня содержит радиально выступающий торцевой фланец 576, в который упирается один конец 577 узла 565 пружины. Другой конец узла 565 пружины упирается в корпус 593 изолятора. Узел 565 пружины толкает рабочий элемент 506 в начальное положение 574, в котором торцевой фланец 576 прилегает к запорной гайке 573, ввинченной в часть 549 корпуса. Часть 549 корпуса соединена с частью 548 корпуса, которая включает винт 539. Винт 539 образован гайкой 540 винта, в данном случае, гайкой с вращающимися роликами, и поворотным ходовым винтом 504, которые вместе образуют винт с планетарными роликами. На его конце 569, обращенном к рабочему элементу 506, поворотный ходовой винт 504 вводится в отверстие на конце 570 рабочего элемента 506 или секции 572 вала, соответственно, и удерживается там посредством болта. Гайка 540 винта может вращаться, но вдоль оси она зафиксирована внутри втулки 542 подшипника.
С противоположной относительно конца 569 стороны, поворотный ходовой винт 504 выступает своим другим концом 568 из гайки 540 винта и также окружен здесь секцией втулки 542 подшипника меньшего диаметра. Снаружи этой секции, во втулке 542 расположен вращающийся игольчатый подшипник 544 части 548 корпуса. Вал 535 подшипника проходит сквозь втулку 542 подшипника, при этом его конец 568 вводится в конец 543 поворотного ходового винта 504 и неподвижно в нем удерживается. На Фиг.23 поворотный ходовой винт 504 показан в его исходном положении 566, то есть вставленным, насколько возможно, сквозь гайку 540 винта в направлении, противоположном инжекционному клапану 502.
Вал 535 подшипника установлен во втулке 536 подшипника, которая соединена с червячным колесом 518 посредством шлицевого соединения. Червячное колесо 518 представляет собой глобоидальное червячное колесо и находится в зацеплении с червяком 517. Втулка 536 подшипника установлена в части 547 корпуса с возможностью вращения, посредством игольчатых подшипников 544. Конец части 547 корпуса, противоположный части 548 корпуса, загерметизирован съемной торцевой плитой 559. Часть 550 корпуса разъемно соединена с торцевой плитой 559, а в ней размещается датчик 295 положения. Торцевая плита также включает каналы 567 для обеспечения электрического соединения между соединителем 514 и устройствами, расположенными внутри части 547 корпуса. Соединительная линия 186 соединяет подводный источник электроснабжения с инжекционным клапаном 500 с электроприводом.
На Фиг.24 представлено сечение по линии III-III на Фиг.22 и 23, соответственно. Часть 547 корпуса состоит, в основном, из центрального корпуса 553, в котором выполнено центральное отверстие 554. В это отверстие вставляется, с возможностью вращения, втулка 536 подшипника, показанная на Фиг.23. Червячное колесо 518 неподвижно соединено с втулкой 536 подшипника посредством шлицевого соединения 537 вала в форме собачки. Своими внешними зубьями оно сцеплено с соответствующими внешними зубьями червяка 517. Червяк 517 расположен на валу 519 червяка, который проходит приблизительно по касательной к центральному отверстию 554.
Концы 520, 521 вала 519 червяка закреплены, с возможностью вращения, посредством шарикоподшипника 533 или роликового подшипника 534. Электродвигатель 509, 510 устройства 505 привода связан с каждым из концов 520, 521 вала 519 червяка. Электродвигатель 509 непосредственно активно соединен с концом вала 520 или валом 522 двигателя, соответственно, и съемно установлен в отверстии 555 для двигателя в центральном корпусе 553. Другой электродвигатель 505 также съемно закреплен в отверстии 556 для двигателя. Синхронная работа обоих электродвигателей 505, 509 может быть осуществлена посредством программных средств, когда, по крайней мере, один электродвигатель работает ведущим, а другой электродвигатель работает ведомым для обеспечения высокого крутящего момента и высокой скорости вращения, которые передаются соответствующим узлом редуктора.
Один конец 525 вала 522 двигателя выступает за электродвигатель 509 вдоль более узкой секции опорной втулки 527. Вал 522 двигателя выступает за пределы опорной втулки 527 в разделительную втулку 528, которая присоединена к опорной втулке 527 через цилиндрическую пружину 529, которая ограничивает вращение разделительной втулки относительно опорной втулки в одном направлении. Одним своим концом 530 цилиндрическая пружина 529 зацепляет освобождающую втулку 531, которая может вращаться относительно разделительной втулки 528 и опорной втулки 527. Освобождающая втулка 531 активно соединена с ведущим валом шагового двигателя 532, который установлен в боковом корпусе 596 в продолжении отверстия 555 для двигателя. Боковой корпус 596 закрыт съемной крышкой 582.
На Фиг.25 показано другое электрическое устройство 46, а именно продольное сечение одного из вариантов выполнения клапанной системы 601, описанной в патентной заявке США серийный №10/467,112, поданной 30 октября 2001 г. и озаглавленной "Клапанная система", которая претендует на привилегии заявки РСТ/ЕР01/12550, поданной 30 октября 2001 г., которая претендует на приоритет заявки DE 20012168.4, поданной 8 февраля 2001 г. (1600-08900; ОТЕ-030331), которые целиком включены в настоящее описание посредством ссылки. Клапанная система 601 содержит корпус 602 клапана и продольный золотник 603, находящийся внутри фиксирующего углубления 616 корпуса 615 клапана. Электрохимическое исполнительное устройство 609 соединено с продольным золотником 603 клапанной системы 601. Электрохимическое исполнительное устройство 609 имеет генератор 662 газа, который вырабатывает газ и, в частности, водород, когда по соответствующим питающим линиям подается электрический заряд. Электрический заряд подается по соединительным линиям к подводному источнику 102 напряжения. Источник питания может быть источником как постоянного напряжения, так и переменного напряжения, в предпочтительном варианте выполнения - постоянного напряжения. Вырабатываемый газ создает повышенное давление внутри генератора 662 газа, и сбрасывающий давление элемент 658 исполнительного устройства под действием этого избыточного давления может быть смещен в направлении корпуса 615 клапана. Сбрасывающий давление элемент 658 соединен с генератором 662 газа посредством сильфона 661.
Сбрасывающий давление элемент 658 разъемно соединен с плитой 657 держателя на конце сбрасывающего давление элемента, обращенного в противоположную от генератора 662 газа сторону. Продольный золотник 603 прикреплен к центру плиты 657 держателя с возможностью отсоединения и может перемещаться в крышке 619 корпуса. Соединительный конец 613 продольного золотника 603 выступает во внутреннее пространство 620 корпуса 617 и здесь прикреплен к плите 657 держателя. Продольный золотник 603 проходит от своего соединительного конца 613 до своего входного конца 614, который соединен с питающей линией 604 в нижней части фиксирующего углубления 616 клапана.
В корпусе 615 клапана имеются впускные каналы 624, 625 и выпускные каналы 626, 627. Связь текучей средой между продольным отверстием 610 и впускными каналами 624, 625, и выпускными каналами 626, 627 определяется линейным положением продольного золотника 603. На Фиг.25 продольный золотник 603 показан в выходном положении, в котором питающая линия 604 имеет связь текучей средой с выходными каналами 626, 627 через продольное отверстие 610 и соединительные линии 611, 612 золотника 603 и каналы 631, 632 центрального корпуса 628.
Продольный золотник 603 сдвигается в положение 653 подачи текучей среды (см. пунктирную линию на Фиг.25) посредством электрохимического исполнительного устройства 609. В положении 653 подачи текучей среды, соединительные линии 611 и 612 продольного золотника 603 совмещаются с кольцевым каналом 646 дроссельного элемента 637. Дроссельный элемент 637 содержит дроссельный компонент 638, имеющий среднее отверстие 639 и направляющий корпус 640. Дроссельный элемент 637 обеспечивает связь текучей средой между питающей линией 604 и впускными каналами 625, 626 через соединительные линии 611 и 612.
Водород вырабатывается в электрохимическом исполнительном устройстве 609 под действием электрического заряда. Сбрасывающий давление элемент 658 под действием соответствующего избыточного давления сдвигается с плитой 657 держателя в направлении питающей линии 604. Аналогично, происходит смещение продольного золотника 603 в положение 653 подачи текучей среды. В этом положении устанавливается соединение между питающей линией 604 через продольное отверстие 610 и соединительные линии 611, 612 к впускным отверстиям 605, 606, и через них к впускным каналам 624, 625. Гидравлическая текучая среда подается к исполнительному устройству в этом положении 653 подачи текучей среды. На Фиг.26 показано другое электрическое устройство 46, а именно вид продольного сечения вращающегося регулирующего устройства 701, описанного в патентной заявке США серийный №10/415, 511, поданной 30 октября 2001 г. и озаглавленной "Вращающееся регулирующее устройство", которая претендует на привилегии заявки РСТ/ЕР01/12554, поданной 30 октября 2001 г., которая претендует на привилегии заявки DE 20018548.9, поданной 30 октября 2000 г. (1600-08300; ОТЕ-030332), которые целиком включены в настоящее описание посредством ссылки. Вращающееся регулирующее устройство 701 сконструировано как устанавливаемый модуль 707, соединяемый фланцем с исполнительным устройством 725. Исполнительное устройство 725 содержит, по крайней мере, один электродвигатель 743, который приводит в действие шариковый винт 744 с шариковой гайкой 746, которая вращается электромотором 743. Поворот шариковой гайки 746 заставляет рециркулирующий шариковый ходовой винт 745 шарикового винта 744 перемещаться в продольном направлении исполнительного устройства 725. Рабочий элемент 724, который соединен с рециркулирующим шариковым ходовым винтом 745, перемещается соответственно, и также перемещается питающий элемент 722 вращающегося регулирующего устройства 701. Электродвигатель 743 может питаться как постоянным напряжением, так и переменным напряжением, причем предпочтительнее использование питания постоянным напряжением. Соединительная линия 186 может подходить к соединителю 709, который соединен с двигателем 743.
Питающий элемент 722 установлен в продольном отверстии 723 роторной втулки 704 вращающегося регулирующего устройства 701 таким образом, что он может сдвигаться. Роторная втулка 704 может вращаться внутри опорной втулки 705, в которую она установлена, и которая прикреплена к исполнительному устройству 725 с возможностью снятия. Роторная втулка 704 установлена так, что она может вращаться, но не может сдвигаться по оси относительно опорной втулки 705.
Для преобразования линейного движения рабочего элемента 724 во вращательное движение роторной втулки 704 относительно опорной втулки 705, между ними установлена трансмиссия 706 в качестве пускового устройства 702. Трансмиссия 706 содержит питающий элемент 722, штифт 717 ввода в зацепление в качестве элемента 716 ввода в зацепление, шарикоподшипник или роликовый подшипник 720, и направляющие пазы 711, 712 в роторной втулке 704, так же, как и направляющие пазы 713, 714 в опорной втулке 705.
Как показано на Фиг.27, направляющие пазы 713, 714 втулки 705 подшипника проходят по прямой в продольном направлении 715, в то время как направляющие пазы 711, 712 в опорной втулке 705 проходят по диагонали к продольному направлению 715, в частности, образуя спираль. Штифт 717 ввода в зацепление своими наружными краями 735, 736 входит в зацепление с продольными пазами 739, 740 опорной втулки 734 пружины. Эти продольные пазы открыты в направлении кольцевого фланца 726 несущей втулки 705. В зоне кольцевого фланца 726 опорная втулка 734 пружины также имеет концевой фланец 737, который соприкасается с кольцевым фланцем 726, когда опорная втулка 734 пружины находится в концевом положении 738, показанном на Фиг.26. Между концевым фланцем 737 и кольцевым фланцем 730 замыкающего кольца 729 установлена сжимаемая пружина как пружинный элемент 733. Эта пружина создает давление на исполнительное устройство 702 вращающегося регулирующего устройства 701 в направлении, противоположном направлению регулировки рабочего элемента 724.
Под воздействием смещения питающего элемента 722 в направлении замыкающего кольца 729 посредством рабочего элемента 724 исполнительного устройства 725, штифт 717 ввода в зацепление, как зацепляющий элемент 716, двигается вдоль направляющий пазов 711, 712 к их концам у замыкающего кольца 729. В то же время, штифт 717 ввода в зацепление двигается вдоль линейных направляющих пазов 713, 714 несущей втулки 705, которая жестко соединена с исполнительным устройством 725. Вследствие цилиндрической формы других направляющих пазов 711, 712 роторной втулки 704, при движении штифта 717 ввода в зацепление вдоль направляющих пазов 713, 714, и вследствие того, что штифт 717 ввода в зацепление одновременно сцеплен с направляющими пазами 711, 712, роторная втулка поворачивается на соответствующий угол. При этом угол вращения зависит от соотношения наклонного пути в направляющих пазах 711, 712 и пути в направляющих пазах 713, 714.
Для обеспечения возвращения регулирующего элемента 703 в конечное положение опорной втулки 734 пружины, показанное на Фиг.26 и 27, имеется сжимаемая пружина 733 между кольцевым фланцем 730 замыкающего кольца 739 и концевым фланцем 737 несущей втулки 734 пружины. Несущая втулка 734 пружины переносится в продольном направлении, когда штифт 717 ввода в зацепление смещается в направление замыкающего кольца 729; концы 735, 736 штифта ввода в зацепление соприкасаются с концами 741, 742 продольных пазов 739, 740, которые образованы в опорной втулке 734 пружины.
На Фиг.28 показано другое электрическое устройство 46, а именно исполнительное устройство 801 в соответствие с патентной заявкой США серийный №10/415,418, поданной 4 сентября 2003 г. и озаглавленной "Исполнительное устройство", которая претендует на привилегии заявки РСТ/ЕР01/12549, поданной 30 октября 2001 г., которая претендует на приоритет заявки DE 20018563.2, поданной 30 октября 2000 г. (1600-08800; ОТЕ-030328), которые целиком включены в настоящее описание посредством ссылки. Исполнительное устройство 801 показано установленным в корпус 803 устройства, который соединен с дроссельным устройством 802, включающим корпус 851 дросселя, имеющий впускное отверстие 859 для текучей среды и выпускное отверстие 860 для текучей среды. Электрический соединитель 813 соединяет исполнительное устройство 801 с удаленным управляющим и исполнительным узлом 80 посредством электрических соединительных линий 186 для электроснабжения электродвигателей 508, 509, питающихся либо постоянным напряжением, либо переменным напряжением, причем в предпочтительном варианте питание производится постоянным напряжением.
Дроссельное устройство 802 дополнительно содержит дроссельный объем 858, который расположен между впускным отверстием 859 для текучей среды и выпускным отверстием 860 для текучей среды, и содержит проходную втулку 863, имеющую несколько сквозных проходных отверстий 885. Напротив выпускного отверстия 860 для текучей среды проходит отверстие 857 дроссельного элемента в корпусе 851 дросселя, в котором расположен дроссельный элемент 862 таким образом, чтобы обеспечивалось смещение в осевом направлении. Дроссельный элемент 862 включает втулку 864 дросселя, которая может смещаться вдоль оси между положением, когда пропускное отверстие 885 перекрыто, и положением, когда пропускные отверстия не перекрываются, посредством чего осуществляется управление потоком текучей среды между впускным отверстием 859 и выпускным отверстием 860. Осевое смещение дроссельного элемента 862 управляется исполнительным элементом 806.
Исполнительный элемент 806 присоединен к вращающемуся ходовому винту 804, который смещается путем вращения резьбовой гайки 825, в которую поворачивающийся ходовой винт вставлен как рециркулирующий шариковый винт или рециркулирующий роликовый ходовой винт. Поворачивающийся ходовой винт 804 и резьбовая гайка 825 (шариковая гайка или роликовая гайка) образуют часть трансмиссии 807, посредством которой исполнительный элемент 806 функционально соединяется для выполнения регулировки.
Резьбовая гайка 825 закреплена в опорной втулке 826 так, что не может вращаться относительно втулки, и может вращаться в осевой опоре 829. На одном конце 827 резьбовой гайки 825, обращенном к исполнительному элементу 806, имеются наружные зубья 828 червячной шестерни 817, которые образуют часть червячной пары 815 и своими зубьями 828 входят в зацепление с соответствующими внешними зубьями червяка 816, как дополнительной части червячной шестеренчатой передачи 815 (см. также Фиг.29).
Червячная шестерня 817 в варианте выполнения, использованном в качестве примера, в соответствии с настоящим изобретением, образована глобоидальным червячным колесом, внешние зубья которого сцеплены с соответствующими внешними зубьями цилиндрического червяка 816. Червяк 816 установлен как дополнительная часть червячной шестеренчатой пары 815 на червячном валу 818. Червяк 816 и червячная шестерня 817 образуют узел 810 трансмиссии как часть трансмиссии 807, в которой этот узел 810 трансмиссии образует самоблокирующийся узел трансмиссии. Посредством двух своих концов 819, 820 вала, червячный вал 818 разъемно соединен с электродвигателями 808, 809, образуя устройство 805 привода исполнительного устройства 801. Электродвигатели 808, 809 представляют собой электродвигатели, в частности, серводвигатели постоянного тока.
Таким образом, исполнительное устройство 801 содержит устройство электропривода, образованное двумя серводвигателями 808, 809. Такими серводвигателями 808, 809 можно управлять на расстоянии по соответствующим соединительным линиям и их устройствами 811, 812 управления. При включении одного двигателя, или синхронном включении двух двигателей такие двигатели приводят в движение червячный вал 818 и, тем самым, червяк 816. Этот червяк 816 сцеплен с соответствующей червячной шестерней 817. Червяк и червячная шестерня образуют самоблокирующуюся червячную пару, которая заблокирована, по крайней мере, против направления подачи вращающегося ходового винта 804 в направлении дроссельного устройства. Самоблокировка червячной пары может быть снята только приложением освобождающего момента от серводвигателей 808, 809.
При взаимодействии с роликовой резьбой как дополнительной части трансмиссии 807, червячная пара легко позволяет получить высокий коэффициент передачи и обеспечивает передачу высокого крутящего момента. Коэффициент передачи может быть достигнут согласно требованиям соответствующим выбором червяка, червячной шестерни, резьбовой гайки и вращающегося ходового винта. Когда вращается резьбовая гайка 825, непосредственно соединенная с червячной шестерней способом, предотвращающим вращение, вращающийся ходовой винт 804 соответственно выдвигается в направление исполнительного устройства, или отводится в противоположном направлении. С вращающимся ходовым винтом 804 соединен исполнительный элемент 806, на свободном конце которого расположен соответствующий дроссельный элемент. Исполнительный элемент с дроссельным элементом сцеплены с корпусом дросселя, прилегающим к исполнительному устройству 801, где они позволяют изменять величину прохода для текучей среды между впускным отверстием для текучей среды и выпускным отверстием для текучей среды.
На Фиг.30 показано еще одно электрическое устройство 46, а именно исполнительное устройство для подводного клапана, согласно Немецкой патентной заявке № DE 20311033, поданной 17 июля 2003 г., под названием "Насосное устройство", включенное в настоящее описание посредством ссылки. На Фиг.30 показано продольное сечение одного из вариантов выполнения насосного устройства 901, в соответствии с изобретением. Насосное устройство 901 включает устройство 905 привода с электрическим питанием, которое состоит из гайки 910 ходового винта, которая может вращаться, но не может перемещаться вдоль оси, и резьбового ходового винта 911, который может перемещаться вдоль оси, но не может вращаться. Гайка 910 ходового винта прикреплена к роторному гнезду 915, которое может вращаться внутри корпуса 935 насоса, в котором она установлена, посредством группы угловых роликовых подшипников.
Роторное гнездо 915 соединено с волновой трансмиссией 913, которая приводится в действие шестерней 919. Шестерня 919 сцеплена с шестерней 920, которая жестко установлена на валу 921 привода, который вращается двумя электродвигателями 909, в виде синхронных или асинхронных двигателей. Электродвигатели 909 могут питаться как от постоянного тока, так и от переменного тока, причем в предпочтительном варианте выполнения питание осуществляется от постоянного тока. Работающие электродвигатели 909 вращают шестерню 920, которая сцеплена с шестерней 919 и вращает ее и, через волновую трансмиссию 913, роторное гнездо 915. Вращение роторного гнезда 915 также приводит к вращению гайки 910 ходового винта, что приводит к осевому перемещению резьбового ходового винта 911. Датчик 295 положения может определять осевое положение резьбового ходового винта 911. Соединитель 907 соединяет электродвигатели 909 с соединительными линиями 186, идущими к подводному источнику 102 питания.
Резьбовой ходовой винт 911 разъемно подсоединен к поршню 961, который установлен так, чтобы мог перемещаться вдоль оси внутри пространства 923 узла 903 цилиндра поршня. Пространство 923 поршня имеет цилиндрическую плиту 930 основания, в которой образованы впускное отверстие 926 и выпускное отверстие 927 приблизительно параллельно друг другу. Обратный клапан 928, который подпружинен в направлении впускного отверстия, установлен со стороны пространства 923 поршня перед впускным отверстием, а аналогичный обратный клапан 929, подпружиненный в направлении поршня 961, установлен со стороны пространства 923 поршня перед выпускным отверстием 927.
Если поршень 961 сдвигается влево, обратный клапан 928 открывается соответствующим отрицательным давлением в пространстве 923 поршня, и гидравлическая текучая среда 904 входит в пространство 923 поршня через впускное отверстие 926. Если поршень 961 сдвигается вправо, гидравлическая текучая среда, находящаяся в пространстве поршня, выдавливается сквозь открытый обратный клапан 929 в выпускное отверстие 927.
Впускное отверстие 926 ведет к буферному резервуару 931, который в значительной мере окружает цилиндрическую плиту 930 основания, и служит для хранения гидравлической текучей среды, которая может подаваться через питающую линию 933. Питающая линия 933 может быть соединена с питающей линией 958 гидравлической текучей среды посредством защелкивающегося соединительного механизма 957. Этот защелкивающийся соединительный механизм 957 аналогичным образом служит для соединения выпускной трубы 934, которая отходит от отводного отверстия 927 через буферный резервуар 931, и которая затем идет далее в направлении клапана 902.
Выпускная труба 934 на участке между защелкивающимся соединительным механизмом 957 и клапаном 902 имеет, по крайней мере, одну ответвляющуюся питающую трубу 936, к которой присоединен аккумулятор 937 в качестве средства поддержания давления для гидравлической текучей среды. В одном варианте выполнения этот аккумулятор содержит ряд тарельчатых пружин 938, которые сложены параллельно и/или последовательно. Аккумулятор 937 работает как средство поддержания давления благодаря конфигурации тарельчатых пружин 938. При соответствующем выборе размеров аккумулятора, клапана и используемого насоса, это устройство может работать без обслуживания в течение длительного времени, когда благодаря использованию аккумулятора насос может включаться с перерывами.
В качестве примера, предположим, что для клапана 902 требуется давление около 1 кбар. Насосное устройство 901 при работе создает давление текучей среды, равное 1,4 кбар. Поэтому аккумулятор 937 поддерживает текучую среду при давлении приблизительно 1,4 кбар. Таким образом, насосное устройство 901 не должно включаться, пока потеря давления в аккумуляторе не превысит приблизительно 0,4 кбар. Только когда давление упадет до величины менее 1,0 кбар, насос начнет работать и снова зарядит аккумулятор.
В некоторых вариантах выполнения используется предохранительный клапан 942, например, подводный предохранительный клапан, который не дает давлению внутри насосного устройства 901 подниматься выше заданного предела. Вблизи буферного резервуара 931 и/или цилиндрической плиты 930 основания, от выпускной трубы 934 и/или выпускного отверстия 927 ответвляются первая отводная труба 939 и вторая отводная труба 940. Первая отводная труба 939 подходит к датчику давления 941, который, в зависимости от давления гидравлической текучей среды, передает электрический сигнал на исполнительный механизм 944. Исполнительный механизм, например шаговый двигатель, имеет вал привода, на одном конце которого установлена шестерня 945, которая находится в зацеплении с кулачковым диском 946, который установлен на роликовых подшипниках 965 на наружной периферии 956 роторного гнезда 915, и может вращаться. Кулачковый диск 946 имеет зубья, сцепленные с шестерней 945, а также с, по крайней мере, одним кулачком 948 управления суправляющим толкателем 947 предохранительного клапана 942.
Предохранительный клапан 942 представляет собой механически управляемый обратный клапан 943. Предохранительный клапан 942 открывается управляющим толкателем 947, если ролик 950 накатывается на управляющий кулачок 949. Открывание клапана 942 обеспечивает связь текучей средой между второй отводной трубой 940 и возвратной линией 955, которая ведет в буферный резервуар 931. В результате, не происходит выпуска в окружающую среду и, соответственно, загрязнения, а также обратной связи с удаленным местом, например, с морского дна на морскую поверхность.
Устройство 952 обратного вращения, например, аналогичное часовой пружине, или цилиндрическая пружина 953, присоединены к исполнительному устройству 944. Конструкция устройства 952 обратного вращения такова, что в случае отказа исполнительного устройства 944 и при открытом предохранительном клапане 942, диск 946 кулачка автоматически поворачивается назад под действием цилиндрической/спиральной пружины так, что обеспечивается закрытие предохранительного клапана 942 как под действием поджимной пружины клапанного элемента в направлении закрытого положения, а также, в частности, за счет обратного вращающего момента цилиндрической/спиральной пружины, как устройства 952 обратного вращения.
На Фиг.31 показан другой вариант выполнения настоящего изобретения. Электрически управляемая система 1000 подводной добычи включает надводную платформу 1010 и одну или более подводных фонтанных арматур 1020. Надводная платформа 1010 соответствует первому пункту 42, как это показано и описано в пояснениях к Фиг.1(с), а подводные фонтанные арматуры 1020 соответствуют удаленному пункту 50, как это показано и описано в пояснениях к Фиг.1(с). Подводные фонтанные арматуры 1020 включают электрические распределительные коробки 1080 управления, подсоединенные через электрические проводники 1050 от подводного электрического распределителя 1030 на полозковом шасси, электрически соединенного с надводной платформой 1010 через электрический кабель 1040 управления, например кабель 68. Подводные фонтанные арматуры 1020 также включают выпускные отверстия 1090 для добываемой продукции, через которые выдаются добываемые текучие среды через трубопроводы 1060, и идущий к надводной платформе 1010 трубопровод 1070 для добываемой продукции. В предпочтительном варианте выполнения, подводные фонтанные арматуры 1020 работают при управлении только электрическими сигналами с платформы 1010, которыми управляются электрические устройства 46, например исполнительные устройства на фонтанных арматурах, но могут, при необходимости, также использоваться гидравлические и электрогидравлические системы управления.
На Фиг.32 схематически представлены некоторые из компонентов системы 1000 добычи. Главная станция 1100 управления включает канал А 1102 и канал В 1104, каждый из которых создается надводным узлом 1106, 1108 связи управления, соответственно. Главная станция 1100 управления осуществляет связь через соединительные линии 1110 и 1112, например, контроллер 76, с системой управления платформы и через проводные и оптически изолированные интерфейсы с высоковольтным преобразователем 1120, например, преобразователем 72. На высоковольтный преобразователь 1120 подается электроснабжение сдвоенной трехфазной сетью от источника 1114 бесперебойного питания платформы, например, 78, и подается изолированное постоянное напряжение на, по крайней мере, четыре проводника 1122, 1124, 1126 и 1128, проходящих внутри электрического кабеля 1040, например, кабеля 68. Кабель 1040 закреплен на механическом подвесе 1132, установленном на платформе 1010.
Электрический кабель 1040 передает электроэнергию и сигналы связи от платформы 1010 к электрическому распределителю 1030 на полозковом шасси. Кабель 1040 может содержать, по крайней мере, восемь высоковольтных коаксиальных кабелей, выполненных одним неразрывным отрезком.
На Фиг.33 показано, что кабель 1040 заканчивается соединителем 1236, который стыкуется с концевой заделкой 1238 электрического кабеля. Концевая заделка 1238 электрического кабеля включает несколько не заделанных в разъем проводников 1240, которые соединяют каждый из электрических проводников в кабеле 1040 с электрическим распределителем 1030 на полозковом шасси.
Электрический распределитель 1030 на полозковом шасси содержит несколько высоковольтных преобразователей (в виде заглушек) 1250, например, преобразователей 86 с компонентами 122 преобразователя, для преобразования высокого напряжения (от 3000 до 6000 В постоянного напряжения) источника питания на поверхности в 300 В постоянного напряжения для питания подводных арматур 1020 и для отделения сигналов связи от постоянного напряжения силового питания. В предпочтительном варианте выполнения, заглушки 1250 представляют модульные конструкции, размеры которых соответствуют электронным узлам понижения силового напряжения и точного управления напряжением, подаваемым на подводные фонтанные арматуры 1020 путем ответвления излишней мощности. Для каждого электрического проводника из кабеля 1040 устанавливается заглушка 1250. Для последующего наращивания системы могут быть предусмотрены присоединительные места 1252.
Выведенные из кабеля проводники 1240 образуют входные линии в заглушки 1250, которые преобразуют высокое напряжение из кабеля 1040 в ток более низкого напряжения. Этот ток более низкого напряжения далее поступает по электрическим перемычкам 1254 к электрическим распределительным коробкам 1080 управления, установленным на подводных фонтанных арматурах 1020. Электрические перемычки 1254 передают от электрического распределителя 1030 на полозковом шасси питание 300 В постоянного напряжения к подводным фонтанным арматурам и экранированные кабели связи для передачи команд к распределительным коробкам управления 1080. Концы каждой электрической перемычки 1254 заканчиваются многоштырьковыми дистанционно управляемым разъемом, стыкуемым в воде.
Электрические распределительные коробки 1080управления выполняют две функции. Во-первых, они управляют различными функциями на подводной фонтанной арматуре, и, во вторых, они получают данные от фонтанной арматуры и подводного оборудования для передачи на поверхность. Распределительные коробки 1080 управления, в предпочтительном варианте выполнения, представляют собой облегченные узлы унифицированной конструкции и предназначены для функционального обеспечения подводных фонтанных арматур 1020. В предпочтительном варианте выполнения, распределительные коробки 1080 управления монтируются на фонтанной арматуре и могут устанавливаться/демонтироваться с использованием стандартных устройств с дистанционным управлением или дистанционно-управляемого спускного инструмента. Электрические соединения между распределительными коробками 1080 управления и подводными фонтанными арматурами 1020 выполняются дистанционно с использованием стыкуемых в воде электрических соединителей через присоединительные места распределительной коробки.
Внутри каждой распределительной коробки 1080 управления размещен подводный электронный модуль, например, контроллер 112, который используется для осуществления всей электронной связи и для мониторинга внутренних и внешних датчиков распределительной коробки, расположенных на управляемом оборудовании. Подводный электронный модуль также управляет работой клапанов на подводной арматуре 1020, приводимых в действие исполнительными механизмами при получении команды из главной станции 1100 управления (см. Фиг.32).
На Фиг.34 схематически изображен узел 1020 подводной фонтанной арматуры, включающей фонтанную арматуру 1310, насаженную на соединитель 1300 устья скважины подводного устья 1302 скважины. Фонтанная арматура 1310 может представлять собой фонтанную арматуру с трубной обвязкой. Уплотняющая втулка 1304 показана проходящей между устьем 1302 скважины и цилиндрической зенковкой в нижней части фонтанной арматуры 1310. Подвеска 1306 лифтовой колонны укреплена внутри фонтанной арматуры 1310 и имеет боковой эксплуатационный отвод 1308, совмещенный с боковым эксплуатационным отводом 1312 в фонтанной арматуре 1310, поток через который управляется главным эксплуатационным вентилем 1314. Внешний трубопровод 1316 показан проходящим от эксплуатационного главного вентиля 1314 к эксплуатационной задвижке 1318 на отводящей линии и эксплуатационной штуцерной задвижке 1320. Линия 1322 проходит от трубопровода 1316 и соединяет эксплуатационный запорный клапан 1324 и испытательный запорный клапан 1326. Поток через трубопровод 1316 подводится к эксплуатационным выпускным трубам 1090 (см. Фиг.31).
С подвески 1306 лифтовой колонны насосно-компрессорная труба 1328 опускается вниз через устье скважины 1302 и в обсаженную скважину. Управляемый с поверхности предохранительный клапан 1330 и датчик 1332 давления и температуры в скважине расположены в нижнем конце эксплуатационной насосно-компрессорной трубы 1328. Линия 1334 управления проходит сквозь фонтанную арматуру 1310 с трубной обвязкой и выходит сбоку подвески 1306 лифтовой колонны для управления предохранительным клапаном 1330 в скважине. Аналогично, электрическая линия 1336 проходит в скважину к датчику 1332 давления и температуры для передачи сигналов от датчика. В предпочтительном варианте выполнения, предохранительный клапан 1330 в скважине управляется электрическим путем в соответствии с описанным выше.
Затрубный канал 1338 проходит от эксплуатационной затрубной колонны в затрубный проход 1342 в корпусе фонтанной арматуры 1310 с трубной обвязкой. Главным вентилем 1344 затрубного канала управляется поток через затрубный канал 1342. Канал 1346 для обеспечения ремонтных работ соединяется с затрубным каналом 1342 и проходит вверх сквозь стенку фонтанной арматуры 1310 с трубной обвязкой к отверстию во внутренней стенке фонтанной арматуры 1310 с трубной обвязкой для обеспечения связи со скважиной 1348 над подвеской 1306 лифтовой колонны. Клапан 1350 для обеспечения ремонтных работ управляет потоком через канал 1346 обеспечения ремонтных работ. Перепускная труба 1352 соединяет канал 1354 и трубопровод 1316, а перепускной клапан 1356 управляет потоком через нее. Задвижка 1358 на затрубной отводящей линии и штуцерная задвижка 1360 газового подъемника расположены в канале 1354.
В предпочтительном варианте выполнения, каждый из клапанов, используемых в подводном узле 1020 фонтанной арматуры, использует электрические исполнительные устройства, которые питаются и контролируются центральной станцией 1100 управления по электрическому кабелю 1040 через электрические распределительные коробки 1080. Двигатели, используемые электрическими устройствами 46, в предпочтительном варианте выполнения, питаются напряжением постоянного тока. Благодаря исключению клапанов с гидравлическим приводом, управление и работа подводного узла 1020 фонтанной арматуры осуществляется с использованием только электричества. Таким образом, система обладает большим числом преимуществ, например, быстрота реакции, исключение использования гидравлических текучих сред, отсутствие сброса текучих сред в море (экологическая безопасность), и способность выполнять диагностику исполнительных устройств, клапанов и задвижек в реальном масштабе времени. На поверхности, исключается необходимость в гидравлическом силовом узле, а надводное оборудование становится более компактным.
В предпочтительном варианте выполнения, узел подводного устья скважины включает подводную фонтанную арматуру, у которой все исполнительные устройства имеют электрический привод. Также желательно, чтобы в исполнительных устройствах с электрическим приводом использовались электродвигатели постоянного тока, и постоянное напряжение на двигатели постоянного тока подавалось от подводного источника постоянного напряжения. Подводные источники постоянного напряжения получают высокое постоянное напряжение от узла электропитания и управления, расположенного на поверхности, по кабелю, а множество подводных преобразователей напряжения преобразуют высокое постоянное напряжение в низкое постоянное напряжение для питания исполнительных устройств с электрическим приводом.
Приведенные здесь варианты выполнения служат только для иллюстрации изобретения и его деталей, и ни в какой степени его не ограничивают. Следует иметь в виду, что возможны многие другие модификации и усовершенствования к приведенному раскрытию, которые могут быть сделаны без выхода за пределы объема изобретения и раскрытых изобретательских концепций. Поскольку многие отличающиеся и различные варианты выполнения могут быть выполнены в пределах объема данной изобретательской концепции, включая эквивалентные конструкции и материалы, которые могут появиться в будущем, и поскольку многие модификации могут быть сделаны в вариантах выполнения, детально описанных здесь в соответствии с соответствующими нормами закона, следует понимать, что эта детальность носит иллюстративный, а не ограничительный характер.
Реферат
Изобретение относится к области электротехники и может быть использовано для эксплуатации скважин насосными установками для энергоснабжения электроэнергией удаленное электрическое устройство. Система энергоснабжения содержит преобразователь переменного напряжения в постоянное напряжение, соединенный с источником переменного напряжения для преобразования переменного напряжения в высокое постоянное напряжение на первом пункте. Преобразователь переменного напряжения в постоянное напряжение содержит множество компонентов преобразователя переменного напряжения в постоянное напряжение, которые на входе соединены параллельно с источником переменного напряжения и которые на выходе соединены последовательно с электрическим проводником. Электрический проводник проходит к множеству преобразователей напряжения на удаленном пункте, входы которых соединены последовательно с электрическим проводником, а выходы выдают соответствующие напряжения на электрическое устройство. 3 н. и 50 з.п. ф-лы, 36 ил.

Комментарии