Обрабатывающая система для переноса яиц и соответствующий способ - RU2622669C2
Код документа: RU2622669C2
Чертежи













Описание
ТЕХНИЧАСКАЯ ОТРАСЛЬ
Данное изобретение главным образом относится к системам для переноса яиц. Точнее, данное изобретение относится к системе для переноса яиц, способной к выборочной сортировке инкубированных яиц согласно схеме классификации яиц, и к соответствующему способу.
УРОВЕНЬ ТЕХНИКИ
Механические устройства используются для переноса яиц в инкубаторно-птицеводческой станции с одного обрабатывающего блока в другой обрабатывающий блок во всем инкубационном цикле для высиживания жизнеспособных яиц. Например, такие устройства могут использоваться для облегчения либо, иначе, для помощи в переносе яиц с инкубатора для сбора яиц с контролируемым климатом в инкубатор для высиживания яиц с контролируемым климатом, где выращиваются новорожденные цыплята. По этому поводу, яйца типично хранятся в различных лотках либо контейнерах на протяжении всего инкубационного цикла. Яйца типично переносятся с одного лотка, связанного с инкубатором для сбора яиц, в иной тип лотка, связанного с инкубатором для высиживания яиц. Типично, лоток инкубатора для сбора яиц выполнен иначе, нежели лоток инкубатора для высиживания яиц. Например, лоток инкубатора для сбора яиц (в общем называемый "платформой") может иметь выемки, способные индивидуально принимать яйца и сохранять яйца в вертикальном положении, в то время как лоток инкубатора для высиживания яиц (в общем называемый "корзина для высиживания") может быть открытым контейнером без выемок таким образом, что птичьи яйца не ограничиваются и готовы для высиживания.
В некоторых случаях, яйца, переносимые между платформами и корзинами для высиживания, могут содержать яйца различных классов. Например, платформы могут содержать как жизнеспособные так и нежизнеспособные яйца, которые потом переносятся в корзину для высиживания. Помещение нежизнеспособных яиц в корзину для высиживания может иметь негативное влияние на высиживание и качество цыплят. Кроме того, нежизнеспособные яйца имеют ценность, состоящую в том, что они могут быть питательными для использования в других отраслях промышленности (например, в пищевой промышленности для домашних животных).
Кроме того, платформы могут содержать как оплодотворенные так и неоплодотворенные яйца, которые потом переносятся в корзину для высиживания. Разделение яиц согласно их статусу перед высиживанием является желательным для некоторых отраслей промышленности по выращиванию домашней птицы, в частности в отраслях промышленности по разведению животных.
Соответственно, должно быть желательным предоставить систему для переноса яиц, способную выборочно сортировать и переносить яйца согласно их классификации. Кроме того, должно быть желательным предоставить соответствующий способ, который должен облегчить выборочную сортировку и перенос яиц согласно их классификации.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Вышеупомянутые и другие требования выполняются аспектами данного изобретения, которое, согласно одному аспекту, предоставляет систему для обработки яиц, имеющую контроллер, сконфигурированный для приема сигнала классификации, указывающего статус для каждого из множества яиц, переносимых яйцесборным транспортером. Верхний переносной блок связан с контроллером и сконфигурирован для удаления множества яиц со яйцесоборного транспортера. Яйца группируются в по меньшей мере первую и вторую подгруппу на основании их статуса. Контроллер сконфигурирован для управления верхним переносным блоком для выборочного отдельного высвобождения первой и второй подгруппы яиц на основании соответствующего статуса яиц.
Иной аспект предоставляет способ обработки яиц. В способе транспортируют множество яиц в лотке яйцесборного транспортера к классифицирующему устройству. В способе дополнительно классифицируют яйца, используя классифицирующее устройство, для присвоения каждому яйцу статуса. Яйца классифицируют как связанные с одной подгруппой, выбранной среди первой подгруппы и второй подгруппы яиц согласно статуса яиц. В способе дополнительно одновременно поднимают первую и вторую подгруппу яиц с лотка яйцесборного транспортера, используя верхний переносящий блок. В способе дополнительно выборочно высвобождают с верхнего переносящего блока одну подгруппу яиц, выбранную среди первой и второй подгруппы яиц. В способе дополнительно с верхнего переносящего блока высвобождают другую подгруппу яиц, выбранную среди первой и второй подгруппы яиц.
Таким образом, различные аспекты данного изобретения предоставляют преимущества, как, иным образом, детализировано здесь.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Таким образом, в общем, раскрывши различные варианты выполнения данного изобретения, ссылка теперь будет делаться на сопровождающие чертежи, которые необязательно выполнены в реальном масштабе и на которых:
ФИГ. 1 изображает вид сбоку системы для переноса яиц, способную осуществлять выборочную сортировку множества птичьих яиц согласно одному аспекту данного изобретения;
ФИГ. 2 изображает схематический вид в перспективе системы для переноса яиц согласно одному аспекту данного изобретения, иллюстрирующий множество яиц, переносимых платформой, которая транспортируется в положение переноса;
ФИГ. 3 изображает схематический вид в перспективе системы для переноса яиц с ФИГ. 2, иллюстрирующий яйца, которые далее транспортируются в положение переноса;
ФИГ. 4 изображает схематический вид в перспективе системы для переноса яиц с ФИГ. 2, иллюстрирующий яйца в положении переноса под верхним переносящим блоком;
ФИГ. 5 изображает схематический вид в перспективе системы для переноса яиц с ФИГ. 2, иллюстрирующий верхний переносящий блок, спускающийся для захватывания яиц;
ФИГ. 6 изображает схематический вид в перспективе системы для переноса яиц с ФИГ. 2, иллюстрирующий верхний переносящий блок, подымающий яйца с платформы;
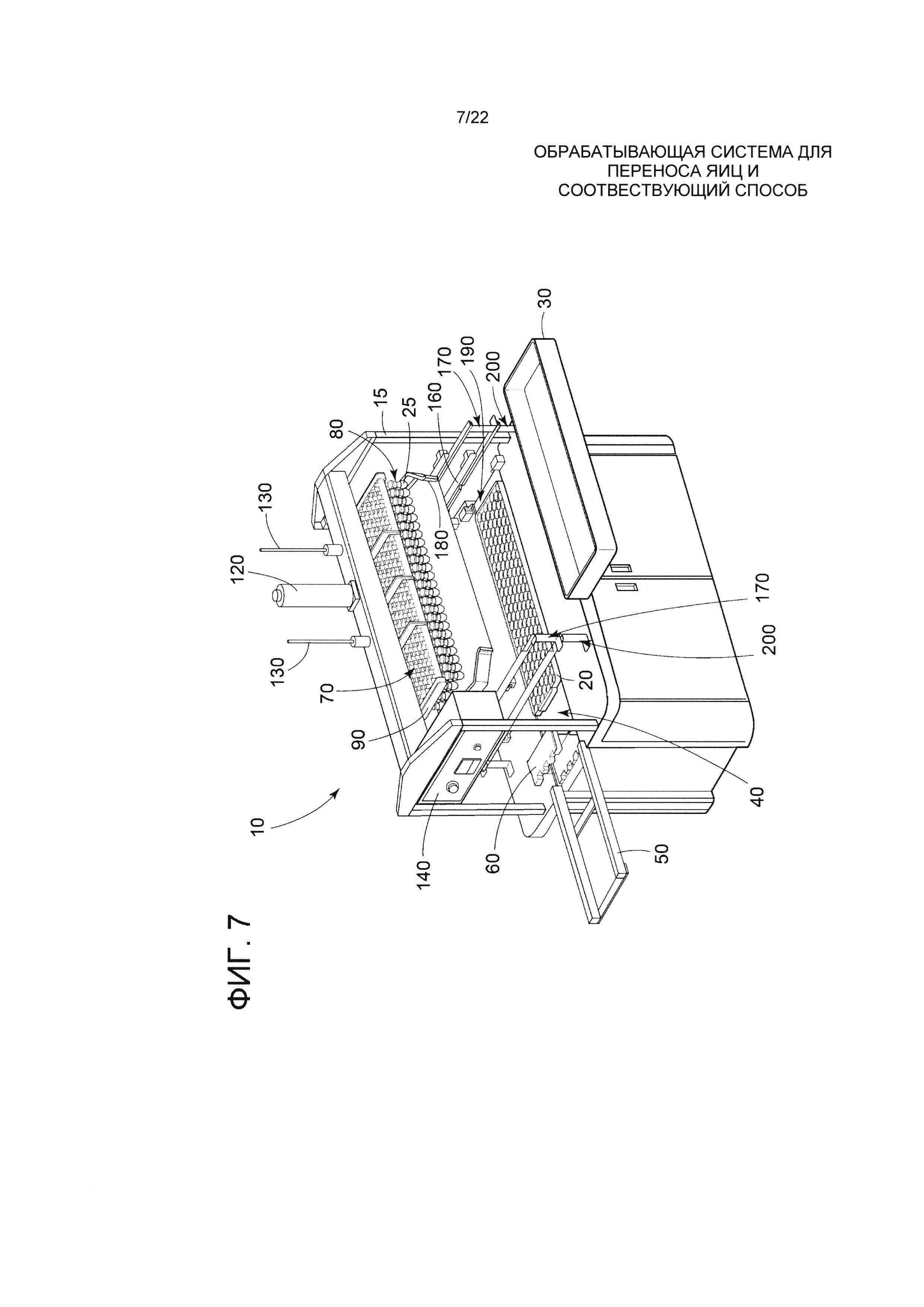
ФИГ. 7 изображает схематический вид в перспективе системы для переноса яиц с ФИГ. 2, иллюстрирующий емкость для выбрасывания яиц, движущуюся в положение под верхним переносящим блоком;
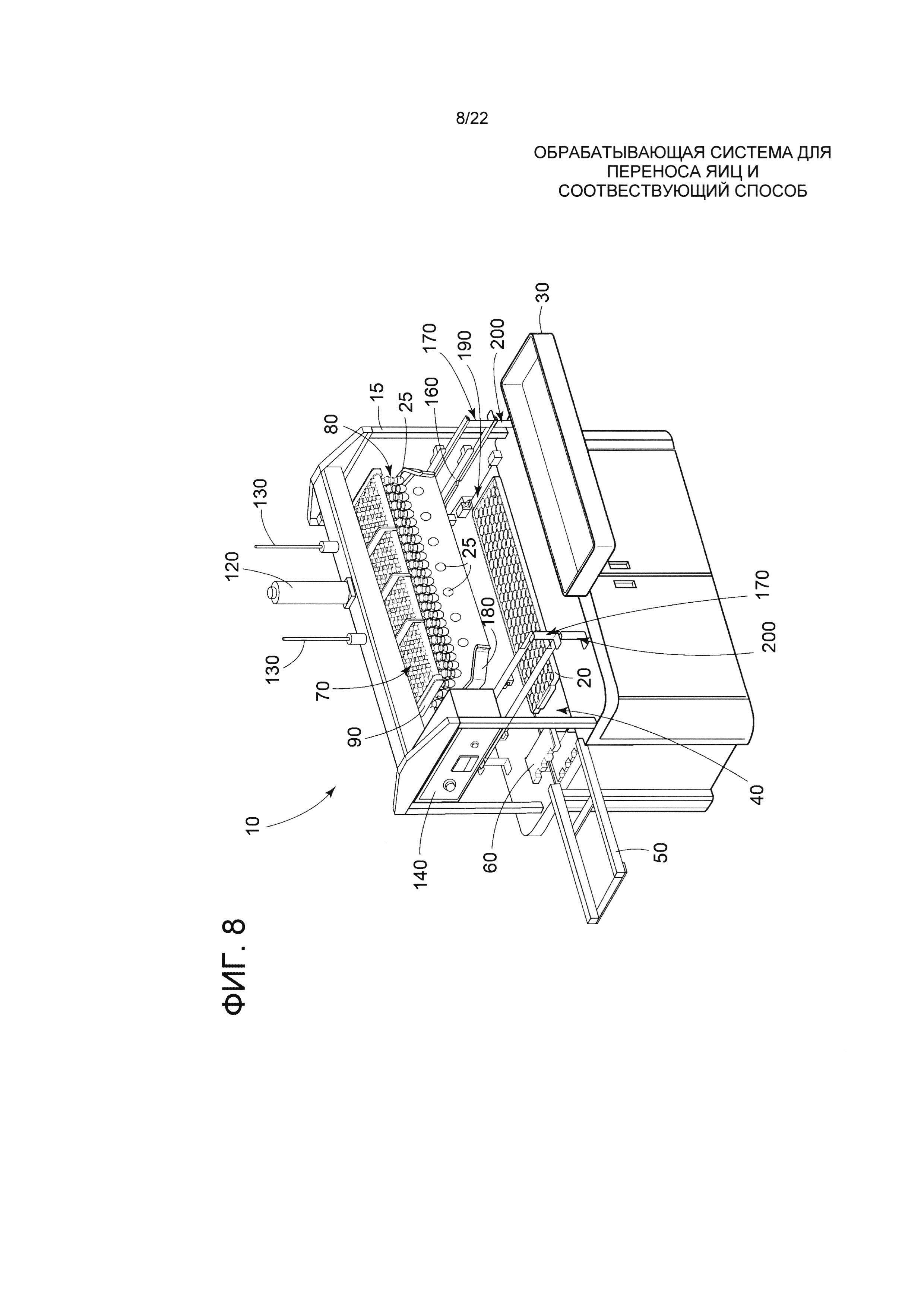
ФИГ. 8 изображает схематический вид в перспективе системы для переноса яиц с ФИГ. 2, иллюстрирующий множество яиц, идентифицированных как нежизнеспособные и выборочно высвобождающиеся в емкость для выбрасывания яиц;
ФИГ. 9 изображает схематический вид в перспективе системы для переноса яиц с ФИГ. 2, иллюстрирующий емкость для выбрасывания яиц, движущуюся в положение для удаления яиц, и корзину для высиживания, движущуюся в положение загрузки;
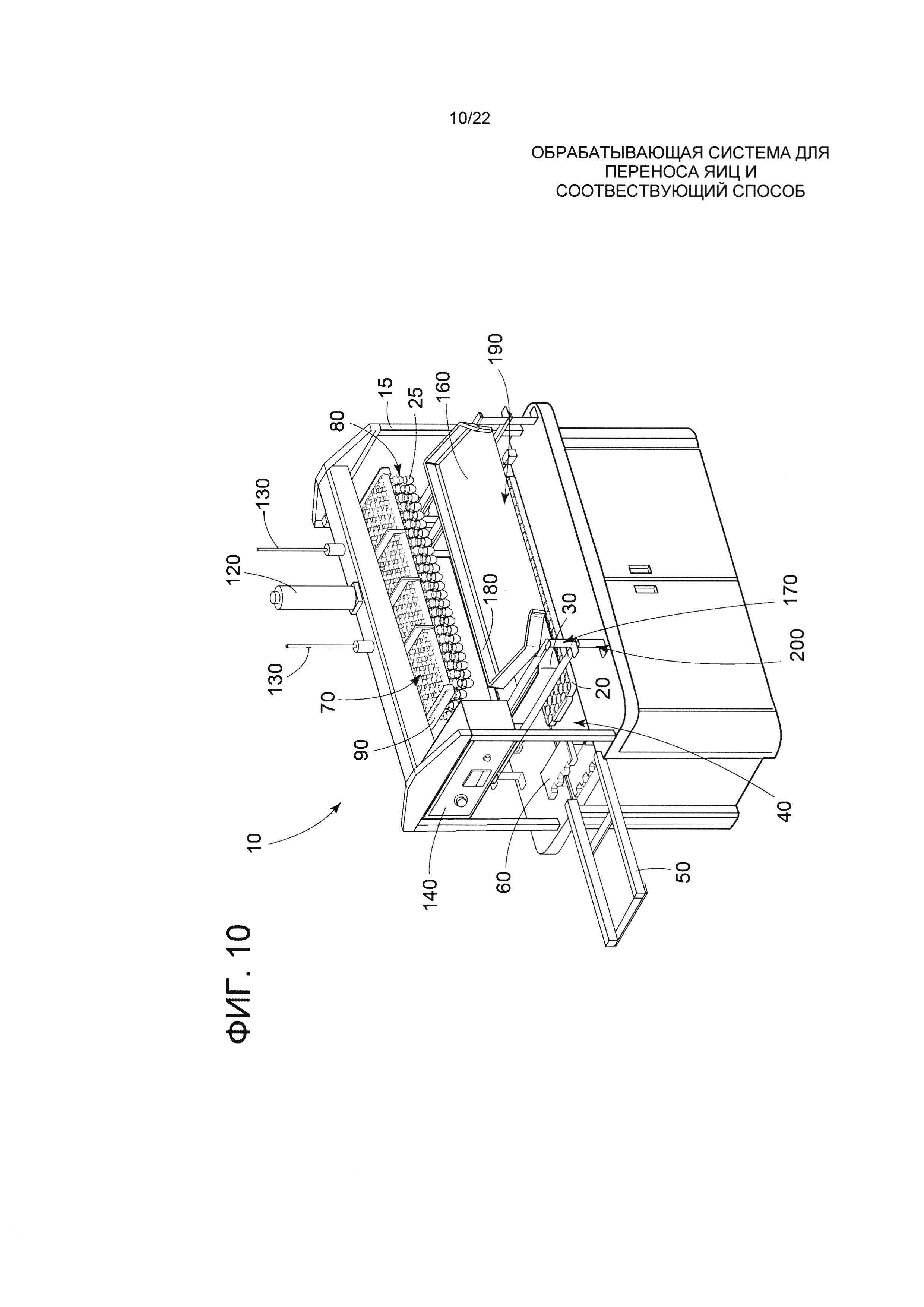
ФИГ. 10 изображает схематический вид в перспективе системы для переноса яиц с ФИГ. 2, иллюстрирующий удаление нежизнеспособных яиц с емкости для выбрасывания яиц;
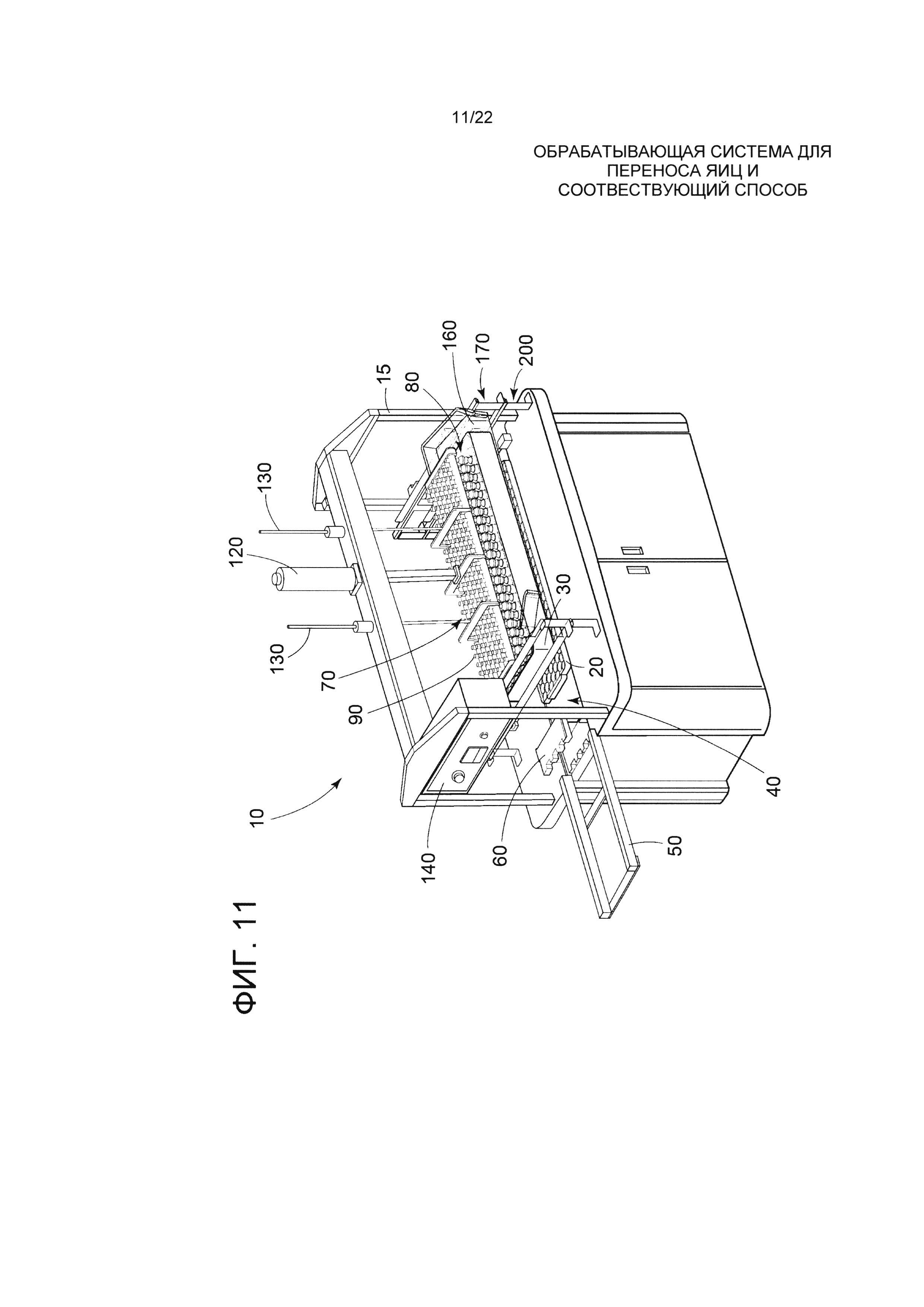
ФИГ. 11 изображает схематический вид в перспективе системы для переноса яиц с ФИГ. 2, иллюстрирующий верхний переносящий блок, спускающийся к корзине для высиживания для высвобождения в нее жизнеспособных яиц;
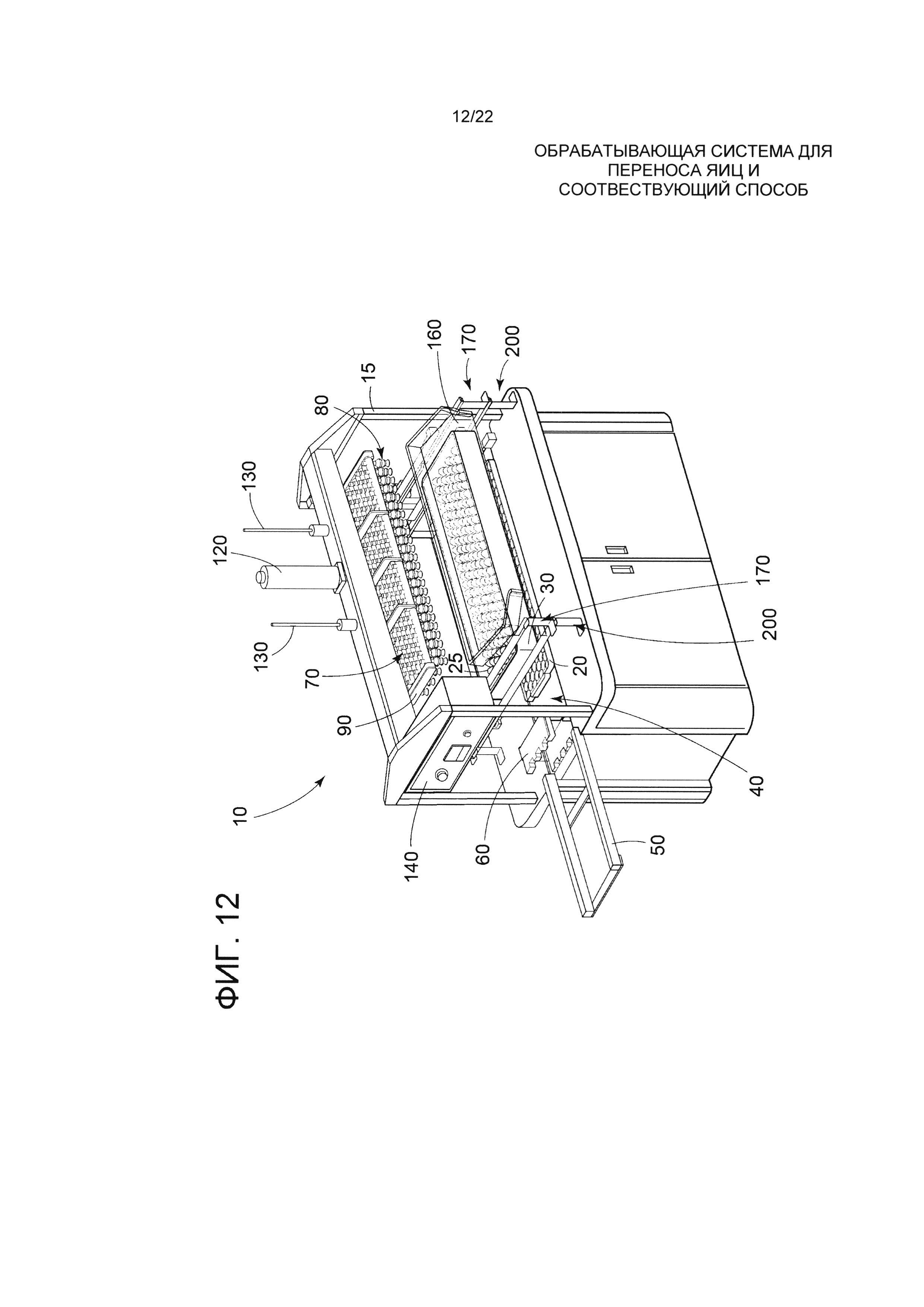
ФИГ. 12 изображает схематический вид в перспективе системы для переноса яиц с ФИГ. 2, иллюстрирующий верхний переносящий блок, подымающийся в положение готовности;
ФИГ. 13 изображает схематический вид в перспективе системы для переноса яиц с ФИГ. 2, иллюстрирующий удаление корзины для высиживания с жизнеспособными яйцами с переносящей системы;
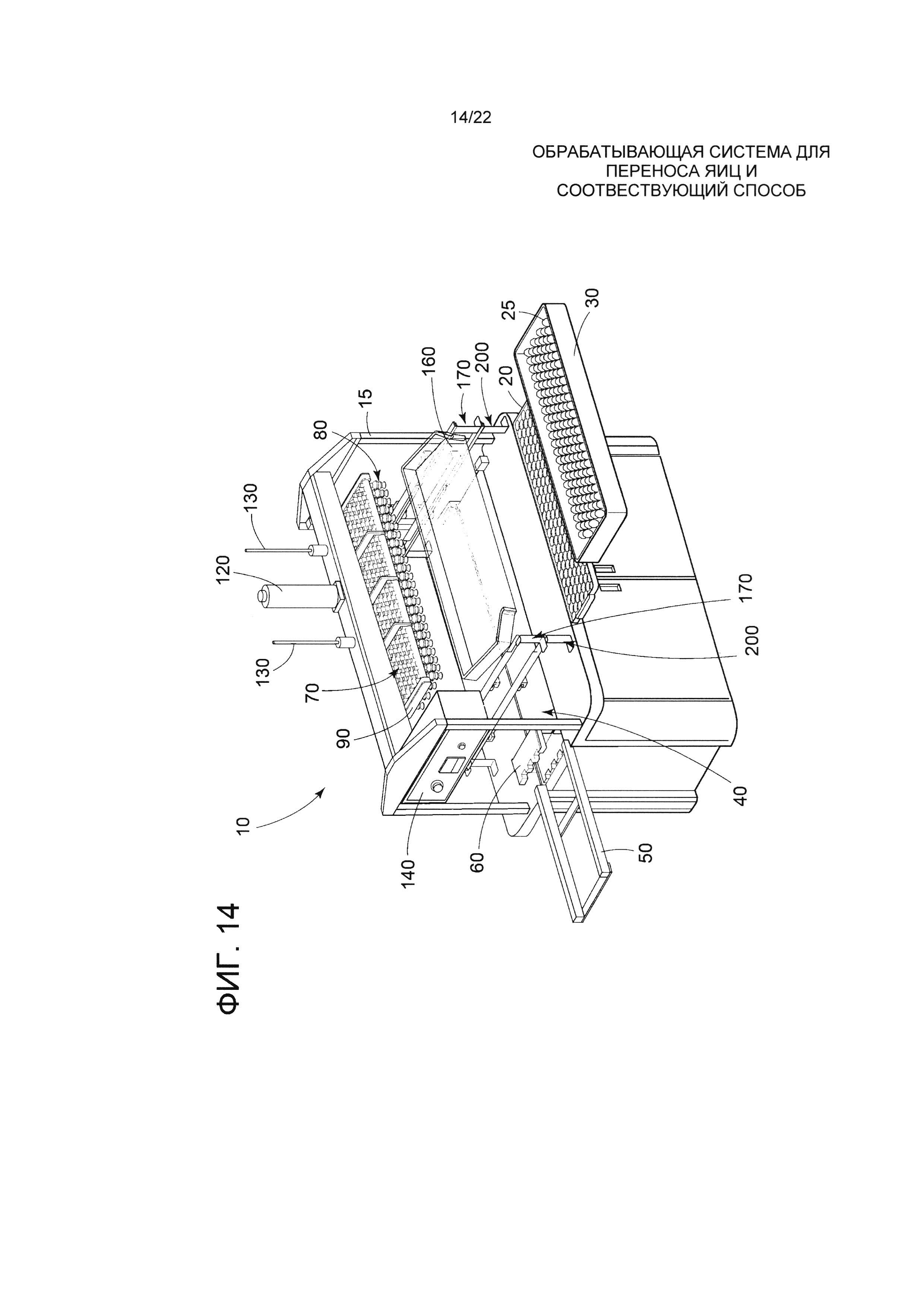
ФИГ. 14 изображает схематический вид в перспективе системы для переноса яиц с ФИГ. 2, иллюстрирующий удаление платформы с переносящей системы;
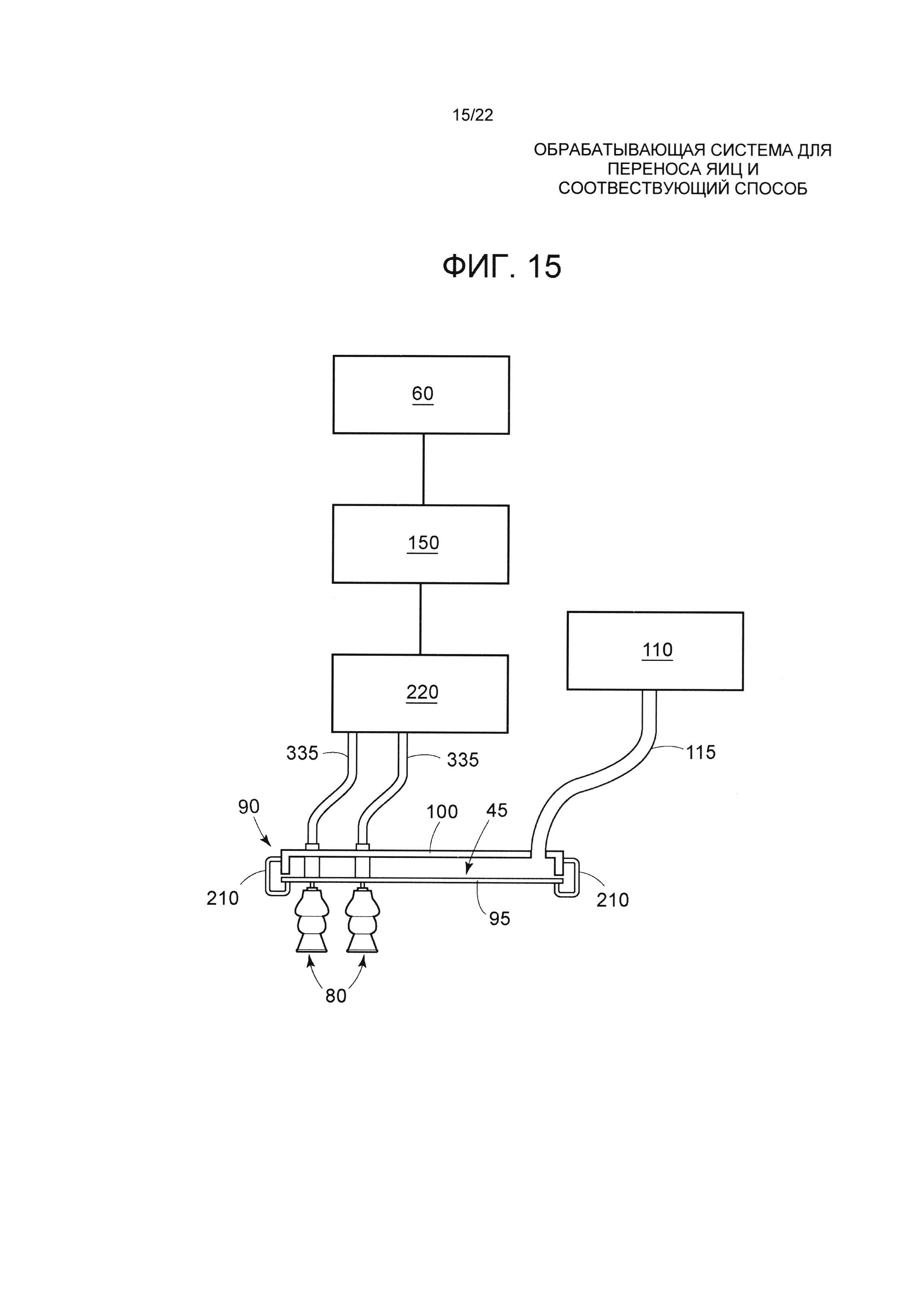
ФИГ. 15 изображает схематический вид верхнего переносящего блока и его соответствующих систем, связанных с классифицирующим устройством, согласно одному аспекту данного изобретения;
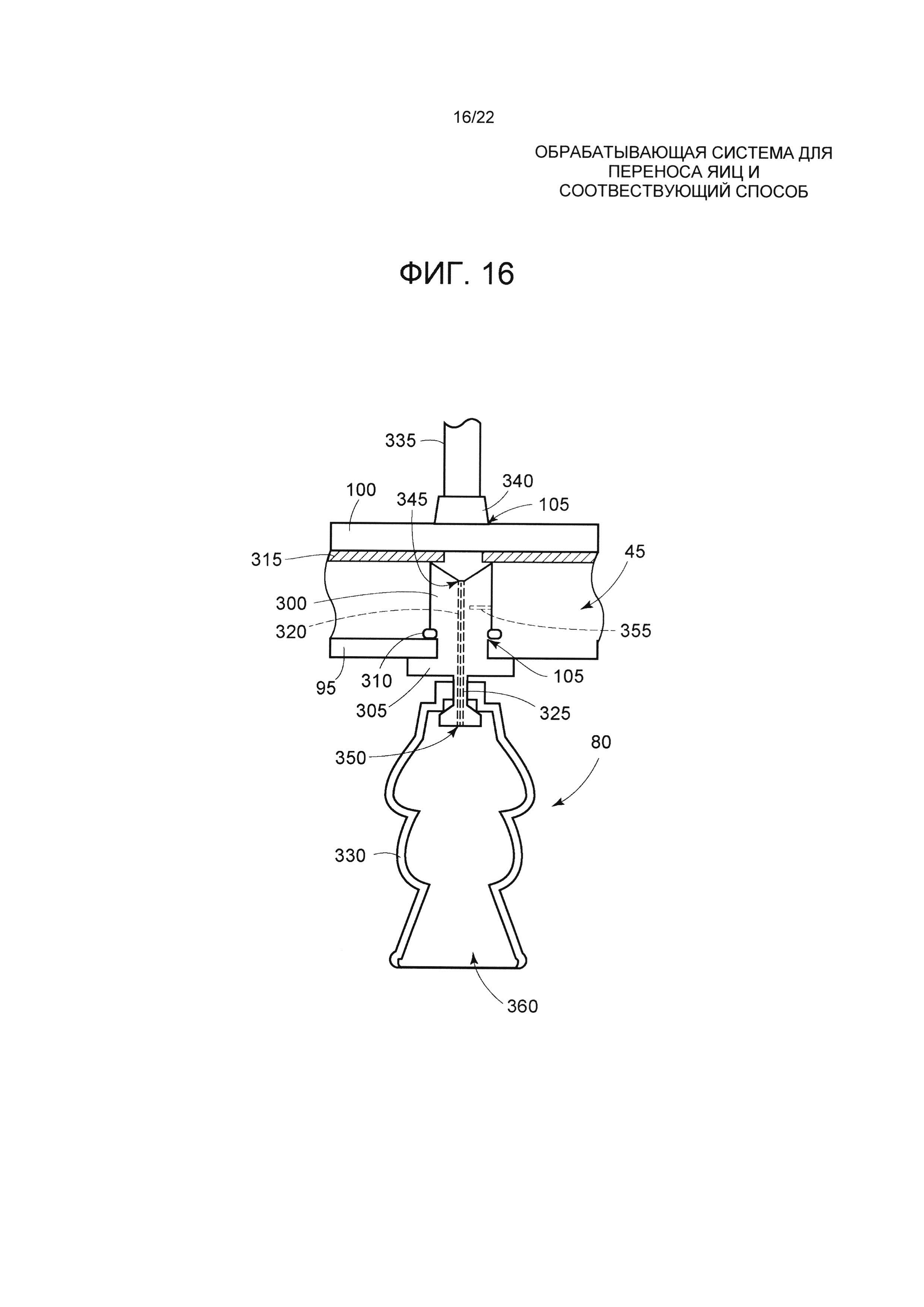
ФИГ. 16 изображает схематический вид поперечного сечения подъемного устройства верхнего переносящего блока согласно одному аспекту данного изобретения;
ФИГ. 17 изображает схематический вид поперечного сечения подъемного устройства, имеющего вентильный привод, согласно одному аспекту данного изобретения;
ФИГ. 18 изображает схематический вид поперечного сечения подъемного устройства с ФИГ. 17, иллюстрирующий активацию вентильного привода для захвата ствола согласно одному аспекту данного изобретения;
ФИГ. 19 изображает схематический вид поперечного сечения альтернативного подъемного устройства, имеющего вентильный привод, согласно иному аспекту данного изобретения;
ФИГ. 20 изображает схематический вид поперечного сечения подъемного устройства с ФИГ. 19, иллюстрирующий активацию вентильного привода для захвата ствола согласно одному аспекту данного изобретения;
ФИГ. 21 изображает схематический вид поперечного сечения альтернативного подъемного устройства, имеющего вентильный привод, согласно еще другому аспекту данного изобретения;
ФИГ. 22 изображает схематический вид поперечного сечения подъемного устройства с ФИГ. 21, иллюстрирующий активацию вентильного привода для захвата ствола согласно одному аспекту данного изобретения;
ФИГ. 23 изображает вид сбоку системы для обработки яиц, имеющей систему для переноса яиц, соединенную с оприскивательным блоком для опрыскивания яиц обрабатывающим веществом, согласно одному аспекту данного изобретения;
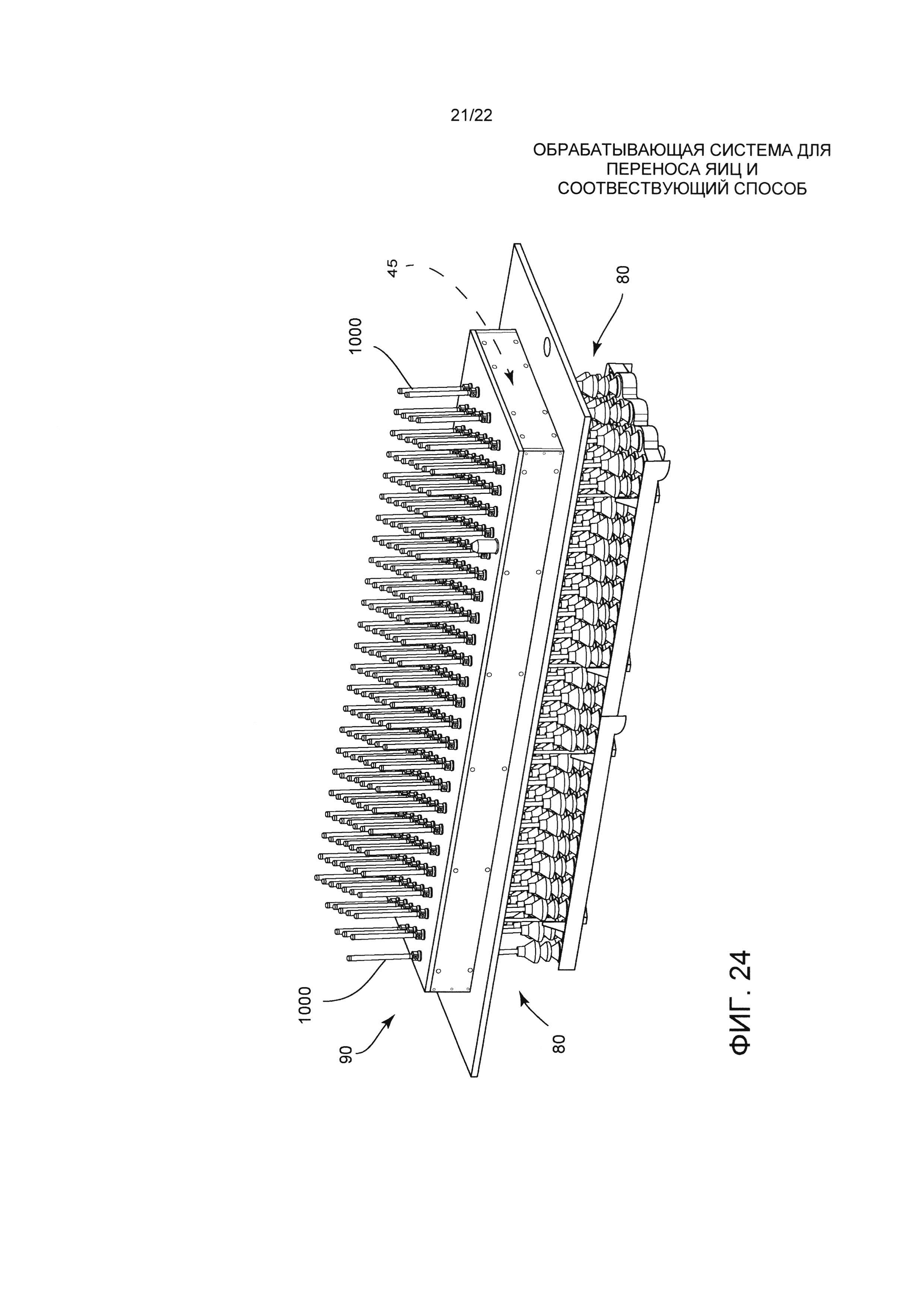
ФИГ. 24 изображает схематический вид в перспективе верхнего переносящего блока системы для переноса яиц согласно одному аспекту данного изобретения; и
ФИГ. 25 изображает увеличенный вид поперечного сечения верхнего переносящего блока, изображенного на ФИГ 24.
ДЕТАЛЬНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Разные аспекты данного изобретения теперь будет описываться далее более полно со ссылкой на сопровождающие чертежи, на которых изображены некоторые, но не все аспекты изобретения. На самом деле, это изобретение может воплощаться во многих разных формах и не должно ограничиваться изложенными в нем аспектами; скорее всего, эти аспекты предоставляются таким образом, что это изобретение будет удовлетворять применимым правовым требованиям. Одинаковые позиционные обозначения обозначают везде одинаковые элементы.
ФИГ. 1 и 2 изображают переносящую систему 10, способную переносить либо, по-иному, сортировать яйца в соответствии с разными аспектами данного изобретения. Аспекты данного изобретения не ограничиваются изображенной переносящей системой 10. В некоторых вариантах выполнения переносящая система 10 может специально приспосабливаться для использования в переносе яиц, расположенных в лотке 20 инкубатора для сбора яиц (так называемая "платформа"), который содержит множество выемок для индивидуального приема и удерживания яиц в основном вертикальном положении. Примеры подходящих коммерческих платформ включают, но не ограничиваются платформой "CHICKMASTER 54", платформой "JAMESWAY 42" и платформой "JAMESWAY 84" (в каждом случае, номер указывает количество яиц, удерживаемых платформой). Используя переносящую систему 10, яйца могут переноситься с платформы 20 к лотку 30 инкубатора для высиживания яиц (так называемая "корзина для высиживания"), который может выполняться как контейнер с открытым концом. В общем, цыплята высиживаются в корзинах для высиживания, которые требуют открытого пространства, позволяющего новорожденным цыплятам расти и двигаться вокруг в противоположность платформам 20. Таким образом, требуются системы (как ручные, так и автоматические) для эффективного переноса с высокими скоростями яиц с платформ 20 в корзины 30 для высиживания.
Согласно некоторым аспектам переносящая система 10 может содержать раму 15 и конвейер 40, предусмотренный для автоматического перемещения платформ с помощью переносящей системы 10 в положение переноса. Конвейер 40 может содержать направляющую реечную систему 50, выполненную для приема и направления платформ 20 в положение переноса. Конвейер 40 может дополнительно содержать соответствующие стопорные элементы, датчики, ленты, бесконечные ленты, двигатели и так далее для надлежащего пошагового перемещения и позиционирования платформ 20 в переносящей системе 10. В некоторых случаях, платформы 20 могут вручную передвигаться сквозь переносящую систему 10. В таких случаях, может предусматриваться направляющая реечная система 50 для обеспечения направления и размещения платформ 20 в положении переноса.
Яйца, поступающие в переносящую систему 10 с помощью платформ 20, могут иметь разные классифицирующие характеристики. Например, платформы 20 могут содержать яйца, которые способны классифицироваться на основании жизнеспособности, содержания патогенов, генетического анализа либо их комбинаций. Как таковые, аспекты данного изобретения относятся к способностям переносящей системы 10 сортировать и переносить яйца согласно таким классификациям. Классификация яиц по подгруппам может осуществляться с использованием любого(х) подходящего(х) классифицирующего(х) устройства(в) для идентификации яиц согласно, например, жизнеспособности, содержанию патогенов, генетическому анализу либо их комбинациям. Такие классифицирующие устройства могут предоставляться как часть переносящей системы 10 либо, в других случаях, могут предоставляться как часть системы 500 для обработки яиц (ФИГ. 23), содержащей переносящую систему 10, как описано далее. Иллюстративные классифицирующие устройства могут быть способными классифицировать яйца путем использования, например, технологии проверки просвечиванием (матовость, инфракрасное излучение, NIR (ближняя инфракрасная область спектра) и так далее), технологии химического анализа либо других известных и подходящих способов классификации, процессов либо технологий. Согласно одному аспекту данного изобретения, как изображено на ФИГ. 2, переносящая система 10 может содержать классифицирующее устройство 60, соединенное с рамой 15 и способное классифицировать яйца. Когда яйца транспортируются сквозь переносящую систему 10, они взаимодействуют с классифицирующим устройством 60 для их идентификации.
После классификации яйца могут потом сортироваться и/либо переноситься, соответственно, используя переносящую систему 10. Согласно аспектам данного изобретения переносящая система 10 может конфигурироваться для выборочной сортировки и/либо переноса яиц согласно схеме выборочного высвобождения. По этому поводу, переносящая система 10 может быть способной одновременно поднимать либо, по-другому, одновременно удалять с платформы 20 яйца, имеющие различные классифицирующие характеристики. В некоторых случаях, все яйца в платформе 20 могут удаляться с нее, в то время как, в других случаях, в платформе 20 могут удаляться не все яйца. По этому поводу, по меньшей мере некоторые из яиц могут оставаться в платформе 20 по ряду причин либо с умыслом, либо неумышленно. В любом случае, яйца, удаленные с платформы 20, могут иметь по меньшей мере более чем одну классифицирующую характеристику среди них таким образом, что удаленные яйца способны классифицироваться по подгруппам яиц.
Например, удаленные яйца могут бить смесью яиц, имеющими либо статус жизнеспособных, либо статус нежизнеспособных, либо смесью яиц, имеющих статус оплодотворенных либо статус неоплодотворенных. Как таковая, переносящая система 10 может быть способной выборочно высвобождать подгруппы яиц отдельно от подъемных либо удаляющих устройств согласно статусу для каждой такой подгруппы таким образом, что яйца могут сортироваться согласно статусу. Например, жизнеспособные яйца могут отдельно высвобождаться от нежизнеспособных яиц таким образом, что жизнеспособные и нежизнеспособные яйца могут непосредственно обрабатываться. В этом особенном случае, жизнеспособные яйца могут переноситься в корзину 30 для высиживания для размещения в инкубаторе для высиживания, в то время как нежизнеспособные яйца могут переноситься к другому обрабатывающему устройству. Как таковые, аспекты данного изобретения преимущественно облегчают гибкую обработку яиц путем сортировки и/либо переноса их согласно классификации и с использованием высвобождающего устройства.
В некоторых случаях, может быть только две подгруппы яиц, идентифицированные классифицирующим устройством 60. Например, яйца могут делиться на первую подгруппу жизнеспособных яиц и вторую подгруппу нежизнеспособных яиц либо первую подгруппу оплодотворенных яиц и вторую группу неоплодотворенных яиц. Однако аспекты данного изобретения предоставляют возможность оперировать более чем двумя подгруппами, классифицированными одним либо большим количеством классифицирующих устройств. Например, классифицирующее устройство 60 либо дополнительное классифицирующее устройство может быть способным дополнительно определять нежизнеспособные яйца либо как чистые (бесплодные) либо мертвые (мертвый эмбрион). В таких случаях, жизнеспособные яйца, чистые яйца и мертвые яйца могут выборочно отдельно высвобождаться таким образом, что каждая подгруппа может независимо сортироваться и обрабатываться.
Как изображено на ФИГ. 1 и 2, переносящая система 10 может иметь верхний переносящий блок 70, соединенный с рамой 15 и выполненный для вертикального перемещения для удаления яиц с платформы 20, когда платформа 20 пребывает в положении переноса под ним. В некоторых случаях, верхний переносящий блок 70 может быть способным перемещаться в поперечном направлении из конвейера 40 и/либо из положения переноса. Верхний переносящий блок 70 может иметь множество удаляющих либо подъемных устройств 80, гидравлически сообщенных с трубопроводом 90 таким образом, что подъемные устройства 80 могут, как правило, создавать вакуум либо отрицательное воздушное давление для поднимания яиц, контактирующих с ними, для удаления яиц с платформы 20. Трубопровод 90 может формироваться с использованием противоположных пластин 95, 100, соединенных для формирования камеры 45, способной быть герметичной для удержания вакуума. Пластины 95, 100 могут соединяться между собой любыми подходящими крепежными средствами, включающими, например, защелки, зажимы, сцепления, болты и соединители. В некоторых случаях, пластина 95 может быть способной удаляться с пластины 100 для предоставления возможности ее чистки.
Вакуумный вентилятор 110 может гидравлически сообщаться с трубопроводом 90 для создания в нем вакуума для облегчения удаления яиц с платформы 20, используя подъемные устройства 80. В некоторых случаях, вакуумный вентилятор 110 может также быть способным создавать в трубопроводе 90 положительное воздушное давление для облегчения общего высвобождения всех яиц, контактирующих с подъемными устройствами 80. То есть вакуумный вентилятор 110 может быть способным переключаться между созданием вакуума и положительного воздушного давления в трубопроводе 90 (и всех подъемных устройствах 80) для достижения желаемого действия (подъем всех яиц либо высвобождение всех яиц). Хотя простое удаление вакуума должно быть эффективным для высвобождения яиц с подъемных устройств 80, может быть желательным создавать по меньшей мере некоторое положительное воздушное давления для гарантии высвобождения яиц с подъемных устройств 80 согласованным и контролируемым способом. Вакуумный вентилятор 110 может гидравлически сообщаться с трубопроводом 90, используя гибкий трубопровод 115 либо другие подходящие гидравлические соединительные средства.
Верхний переносящий блок 70 может пневматически приводиться в действие для вертикального перемещения для удаления и поднимания яиц с платформы 20. Как упомянуто раньше, верхний переносящий блок 70 может также конфигурироваться для перемещения вбок, используя, например, пневматику. В некоторых случаях, верхний переносящий блок 70 может пневматически опускаться и подыматься, используя передаточный цилиндр 120, гидравлически сообщенный с пневматической системой, известной специалистам в этой отрасли, вместе с направляющими валами 130 для направления верхнего переносящего блока 70.
Как изображено на ФИГ. 2, управляющий блок 140 может иметь контроллер 150 (ФИГ. 15), который сообщен с верхним переносящим блоком 70. Контроллер 150 может конфигурироваться для приема либо непосредственно, либо косвенно сигнала классификации, связанного со статусом, от классифицирующего устройства 60 для каждого яйца в платформе 20. Контроллер 150 может конфигурироваться для управления верхним переносящим блоком 70 для выборочного высвобождения с него желаемых подгрупп яиц. По этому поводу, контроллер 150 может быть способен осуществлять отдельное управления каждым подъемным устройством 80 таким образом, что яйца могут индивидуально и выборочно высвобождаться отдельно с верхнего переносящего блока 70. В некоторых случаях, контроллер 150 может управлять системой 220 для создания положительного воздушного давления (ФИГ. 15) либо активированием клапанов для индивидуального управления высвобождением яиц каждым подъемным устройством 80. Согласно некоторым аспектам, контроллер 150 может конфигурироваться для управления боковым и/либо вертикальным перемещением (то есть поднимание и опускание) верхнего переносящего блока 70.
ФИГ. 2-14 изображают последовательность операций для иллюстративной переносящей системы 10. В иллюстративной переносящей системе 10 множество яиц 25 классифицируются с использованием классифицирующего устройства 60, использующего измерение параметров света (просвечивающее устройство), в котором свет пропускается сквозь яйцо и оценивается оптическим датчиком. Яйца 25 могут идентифицироваться либо как жизнеспособные, либо как нежизнеспособные. Оптические датчики могут функционально соединяться непосредственно с контроллером 150 (который может быть микропроцессором либо другой программируемой либо непрограммируемой схемой) либо с другим контроллером, способным передавать информацию к контроллеру 150 таким образом, что контроллер 150 косвенно принимает статус классификации.
Как изображено на ФИГ. 2 и 3, конвейер 40 перемещает яйца 25, хранящиеся в платформе 20, сквозь классифицирующее устройство 60 таким образом, что каждое яйцо 25 проходить сквозь него и данные (статус яйца) могут получаться для каждого яйца 25. Данные, собранные классифицирующим устройством 60, могут предоставляться контроллеру 150 (либо другому контроллеру) для обработки и хранения данных, связанных с каждым яйцом 25. Контроллер 150 может потом быть способным генерировать сигнал выборочного высвобождения для передачи его к верхнему переносящему блоку 70 либо соответствующим системам таким образом, что отдельные яйца 25 (либо подгруппы яиц) отдельно высвобождаются на основании данных, собранных классифицирующим устройством 60.
Как изображено на ФИГ. 4, платформа (либо платформы) 20 с яйцами могут транспортироваться в положение переноса под верхним переносящим блоком 70. В некоторых случаях, верхний переносящий блок 70 может быть способным за раз обрабатывать много платформ 20. С помощью надлежащим образом расположенной платформы (либо платформ) 20 трубопровод 90 может опускаться для предоставления каждому подъемному устройству 80 возможности располагаться и присасываться к одному соответствующему яйцу 25, как изображено на ФИГ. 5. Потом вакуумным вентилятором 110 может создаваться вакуум таким образом, что яйца 25 присасываются к подъемному устройству 80. Как изображено на ФИГ. 6, верхний переносящий блок 70 может подыматься передаточным цилиндром 120 таким образом, что яйца 25 удаляются и подымаются с платформы 20. Один либо большее количество грузов 35 может использоваться для нагружения платформы 20, в то время как яйца 25 подымаются для удержания платформы 20 на конвейере 40. Сразу после удаления с платформы 20 яйца 25 могут подыматься, опускаться либо высвобождаться (выборочно либо невыборочно) верхним переносящим блоком 70 различными способами, в различных последовательностях либо на различных этапах согласно желаемой схеме обработки, реализуемой на переносящей системе 10. Например, схема обработки может воплощаться для выбрасывания нежизнеспособных яиц и для переноса жизнеспособных яиц в корзину 30 для высиживания.
Как изображено на ФИГ. 7, переносящая система 10 может содержать емкость 160 для выбрасывания яиц, прикрепленную либо, по-иному, операбельно соединенную с рамой 15. Емкость 160 для выбрасывания яиц может выполняться для поступательного перемещения вбок под верхний переносящий блок 70 вдоль реечного блока 170. По этому поводу, емкость 160 для выбрасывания яиц может размещаться для приема нежизнеспособных яиц, выборочно высвобожденных верхним переносящим блоком 70. В некоторых случаях, верхний переносящий блок 70 может опускаться ближе к емкости 160 для выбрасывания яиц перед выборочным высвобождением их, хотя, в других случаях, верхний переносящий блок 70 может оставаться главным образом неподвижным до выборочного высвобождения яиц после расположения под ним емкости 160 для выбрасывания яиц. В некоторых случаях, как упомянуто перед этим, верхний переносящий блок 70 может быть способным перемещаться вбок таким образом, что емкость 160 для выбрасывания яиц остается в стационарном положении для приема нежизнеспособных яиц, а не передвигается под верхний переносящий блок 70.
Согласно некоторым аспектам емкость 160 для выбрасывания яиц имеет множество стенок 180 для предотвращения выкатыванию яиц наружу. Стенки 180 могут объединяться для формирования отверстия 190, которое позволяет нежизнеспособным яйцам выходить из емкости 160 для выбрасывания яиц. В некоторых случаях, емкость 160 для выбрасывания яиц может выполняться для поворачивания либо, по-другому, наклонения при выдвижении из-под верхнего переносящего блока 70 для помощи в направлении яиц к отверстию 190. Например, роликовый транспортер либо четырехстержневое соединение может выполняться для принуждения емкости 160 для выбрасывания яиц передвигаться наружу из-под верхнего переносящего блока 70. Нежизнеспособные яйца, выходящие с емкости 160 для выбрасывания яиц, могут направляться к мусорной емкости, контейнеру, конвейеру для дальнейшей обработки либо к любому другому обрабатывающему устройству. Иллюстрируя и описывая данное изобретение относительно удаления нежизнеспособных яиц с переносящей системы 10, будет очевидно, что емкость 160 для выбрасывания яиц может использоваться для приема яйца любой классификации для управления их обработкой.
ФИГ. 9 и 10 иллюстрируют установку корзины 30 для высиживания на реечный блок 200 для передвижения корзины в положение под верхним переносящим блоком 70 и над платформой 20. В некоторых случаях, реечный блок 200 для корзины может располагаться под реечным блоком 170 на раме 15, но над положением платформы 20 для переноса. По этому поводу, корзина 30 для высиживания может опускаться под емкость 160 для выбрасывания яиц. После расположения под верхним переносящим блоком 70, корзина 30 для высиживания готова для приема жизнеспособных яиц, удерживаемых подъемными устройствами 80. Как таковой, верхний переносящий блок 70 может опускаться к месту в непосредственной близости от корзины 30 для высиживания таким образом, что повреждение яиц минимизируется либо, по-другому, ограничивается при высвобождении их в корзину 30 для высиживания, как изображено на ФИГ. 11.
Высвобождение жизнеспособных яиц в корзину 30 для высиживания может достигаться либо выборочно, либо невыборочно. Для выборочного высвобождения, контроллер 150 может указывать верхнему переносящему блоку 70, какие яйца (жизнеспособные) выбирать для высвобождения, подобно к выборочному высвобождению нежизнеспособных яиц. Невыборочное высвобождение может осуществляться радом способов. Например, создание вакуума в трубопроводе 90 может прерываться таким образом, что подъемные устройства 80 больше не обеспечивает засасывание яиц. В некоторых случаях, вакуумный вентилятор 110 может переключаться на создание в трубопроводе 90 положительного воздушного давления (и подъемных устройствах 80) для управления и обеспечения высвобождения всех оставшихся яиц. Другое невыборочное высвобождение обозначает создание положительного воздушного давления в каждом подъемном устройстве 80 одновременно, а не, как правило, используя трубопровод 90.
Как изображено на ФИГ. 12, при высвобождении яиц в корзину 30 для высиживания, верхний переносящий блок 70 может подыматься в положение готовности для обработки следующей(х) платформы(м) 20. Как изображено на ФИГ. 13, корзина 30 для высиживания может удаляться с переносящей системы 10 и располагаться в стеллаж для высиживания (не изображен) для транспортировки в инкубатор для высиживания. Как изображено на ФИГ. 14, платформа 20 может удаляться с переносящей системы 10 для предоставления следующей платформе 20 возможности продвигаться в положение переноса. Платформа 20, корзина 30 для высиживания и емкость 160 для выбрасывания яиц могут вставляться и удаляться с любой стороны переносящей системы 10, и данное изобретение не ограничивается проиллюстрированными аспектами.
ФИГ. 15 изображает трубопровод 90, сформированный с использованием противоположных пластин 95, 100 для формирования между ними камеры 45. Пластины 95, 100 могут соединяться между собой защелками 210, которые позволяют удалять пластину 95 и, в некоторых случаях, подъемные устройства 80 (когда соединены с ними) для чистки. Подъемные устройства 80 могут операбельно соединяться с трубопроводом 90 таким образом, что подъемные устройства 80 гидравлически соединены с камерой 45 и вакуумным вентилятором 110. Согласно одному аспекту данного изобретения подъемные устройства 80 могут индивидуально гидравлически сообщаться с системой 220 для создания положительного воздушного давления таким образом, что положительное воздушное давление может индивидуально создаваться в каждом подъемном устройстве 80. Система 220 для создания положительного воздушного давления может содержать насосы, клапаны, гибкий трубопровод и так далее для создания в подъемных устройствах 80 положительного воздушного давления. В некоторых случаях, подъемные устройства 80 могут содержать клапаны для облегчения выборочного высвобождения с них яиц. В некоторых случаях, система 220 для создания положительного воздушного давления может связываться с контроллером 150 для приема управляющих инструкций, касающихся создания в выбранных подъемных устройствах 80 положительного воздушного давления для выборочного высвобождения яиц. Как описано перед этим, контроллер 150 может связываться с классифицирующим устройством 60 либо непосредственно, либо косвенно для приема от него данных классификации.
Согласно одному аспекту, как изображено на ФИГ. 24 и 25, подъемные устройства 80 могут операбельно соединяться с трубопроводом 90 таким образом, что они гидравлически сообщаются с камерой 45 и вакуумным вентилятором 110 (не изображен) либо, по-другому, только с вакуумной системой. Согласно одному аспекту данного изобретения подъемные устройства 80 могут индивидуально гидравлически сообщаться с системой 220 для создания положительного воздушного давления (не изображена) таким образом, что положительное воздушное давление может индивидуально создаваться в каждом подъемном устройстве 80. В одном специальном аспекте, отверстие подъемного устройства 80 может располагаться в камере 45. Вакуум в камере 45 может быть общим для всех подъемных устройств 80 таким образом, что подъемные устройства 80 поднимают только соответствующее яйцо с помощью системы 220 для создания положительного воздушного давления, когда подъемное устройство 80 передвигается в положение в близости возле яйца. В некоторых случаях, подъемные устройства 80 могут иметь цилиндрические стержни 1000, которые могут выборочно активироваться для соединения с системой 220 для создания положительного воздушного давления.
ФИГ. 16-22 изображают различные подъемные устройства 80, выполненные для предоставления верхнему переносящему блоку 70 возможностей выборочного высвобождения яиц. В общем, подъемные устройства 80 могут вместе управляться для удаления всех яиц с платформы 20 путем гидравлического соединения подъемных устройств с вакуумным вентилятором 110 с помощью трубопровода 90. Кроме того, подъемные устройства 80 могут индивидуально и независимо управляться для облегчения выборочного высвобождения яиц и их подгрупп. По этому поводу, положительное воздушное давление, создаваемое индивидуально в каждом выбранном подъемном устройстве(х) 80, может использоваться для преодоления общего вакуума, создаваемого с помощью трубопровода 90 во всех подъемных устройствах 80. В примере жизнеспособных/нежизнеспособных яиц нежизнеспособные яйца могут определяться верхним по ходу технологического процесса классифицирующим устройством 60. Управляющие устройства могут использоваться для включения клапана, связанного с положением каждого нежизнеспособного яйца в верхнем переносящем блоке 70, для создания положительного давления в таком специальном положении нежизнеспособного яйца. Положительное давление эффективно преодолевает вакуум в подъемном устройстве таким образом, что нежизнеспособное яйцо выборочно высвобождается отдельно от жизнеспособных яиц. В некоторых случаях, вакуум, созданный в трубопроводе 90, может составлять от приблизительно 3 psi до приблизительно 6 psi (либо приблизительно 0,1 бар - приблизительно 0,5 бар; либо 20 кПа - приблизительно 42 кПа, которые не являются точными преобразованиями), в то время как положительное воздушное давление, создаваемое в подъемном устройстве 80 для преодоления вакуума и высвобождения соответствующего яйца, может составлять приблизительно 20 psi - приблизительно 100 psi (либо приблизительно 135 кПа - приблизительно 700 кПа, которые не являются точными преобразованиями) и типично составляет приблизительно 40 psi - приблизительно 60 psi (либо приблизительно 275 кПа - приблизительно 415 кПа, которые не являются точными преобразованиями), хотя данное изобретение не ограничивается такими установленными интервалами либо величинами.
Согласно одному аспекту, как изображено на ФИГ. 16, пластины 95, 100 могут формировать множество отверстий 105 для приема подъемных устройств 80 таким образом, что подъемные устройства 80 проходят между ними. Подъемное устройство 80 может иметь тело 300 и фланец 305. Тело 300 может операбельно соединяться с пластинами 95, 100 трубопровода 90 таким образом, что по меньшей мере часть тела 300 расположена в камере 45. Фланец 305 может располагаться вне камеры для упирания в пластину 95. Уплотнительное кольцо 310 (например, О-кольцо) может располагаться в камере 45 напротив фланца 305. Прокладка 315 может устанавливаться с упиранием в пластину 100 для герметизации тела 300 вокруг отверстий 105 пластины 100. Тело 300 может иметь соединительный элемент 325, выполненный как одно целое либо, по-другому, операбельно соединенный с ним и/либо с фланцем 305. Подъемное устройство 80 может иметь гибкий засасывающий элемент (колпачок) 330, выполненный для контактирования, сцепления и поднимания яиц с использованием подсасывающих сил. Согласно одному аспекту, гибкий засасывающий элемент 330 может крепиться, соединяться, сцепляться либо, по-другому, операбельно соединяться с соединительным элементом 325. Отверстия 105 в пластине 100 могут позволять индивидуальное соединение подъемных устройств 80 с системой 220 для создания положительного воздушного давления с использованием гибкого трубопровода 335, гидравлических соединительных элементов 340, фитингов, клапанов либо других подходящих пневматических компонентов. В некоторых случаях, клапаны могут располагаться на верхней части трубопровода 90 для непосредственного соединения с пластиной 100 без гибкого трубопровода.
Ссылаясь постоянно на ФИГ. 16, видим, что тело 300 может формировать проточный канал 320, проходящий сквозь него между входным отверстием 345 и выходным отверстием 350 таким образом, что тело 300 гидравлически сообщается с внутренней частью 360 гибкого засасывающего элемента 330. Этим способом, гибкий засасывающий элемент 330 может создавать положительное воздушное давление, которое облегчает выборочное высвобождение яиц. Тело 300 может дополнительно формировать канал 355 трубопровода, гидравлически сообщенный с камерой 45 и проточным каналом 320 таким образом, что внутренняя часть 360 гибкого засасывающего элемента 330 гидравлически сообщена с общим источником создания отрицательного воздушного давления (создается вакуумным вентилятором 110), использующегося для поднимания яиц с платформы 20. Как описано перед этим, выборочное высвобождение яиц может осуществляться индивидуально созданием положительного воздушного давления в выбранных подъемных устройствах 80 для достаточного преодоления отрицательного воздушного давления, как правило, создаваемого во всех подъемных устройствах 80 посредством вакуумного вентилятора 110, как изображено на ФИГ. 15. Иными словами, когда создается положительное воздушное давление, то давление в центре тела 300 (и гибком засасывающем элементе 330) может становиться чуть-чуть положительным, и получаемый малый воздушный поток будет высвобождать яйцо без потери вакуума на других яйцах.
ФИГ. 17 и 18 изображают иное подъемное устройство 80, способное предоставлять верхнему переносящему блоку 70 возможностей выборочного высвобождения яиц. Согласно этому специальному аспекту положительное воздушное давление эффективно преодолевает вакуум в гибком засасывающем элементе 330 путем использования ствола 365 и конфигурации вентильного привода 370. ФИГ. 19-22 изображают подобные конфигурации, но с по-иному выполненными стволами 365 и вентильными приводами 370. ФИГ. 17, 19 и 21 изображают вентильный привод 370 в открытом положении, в то время как ФИГ. 18, 20 и 22 изображают вентильный привод 370 в закрытом положении таким образом, что в гибком засасывающем элементе 330 создается положительное воздушное давление. Конфигурация с ФИГ. 17 и 18 изображают вентильный привод 370, расположенный в полой части ствола 365. Конфигурация ФИГ. 19 и 20 изображает конец 375 ствола 365, расположенный в камере 45 и имеющий конусную форму. Вентильный привод 370 может формироваться для соответствия концу 375 для контактирования с ним. Конфигурация с ФИГ. 21 и 22 изображает конец 375 ствола 365, расположенный в камере 45 и имеющий цилиндрическую форму. Вентильный привод 370 может формироваться для соответствия концу 375 для контактирования с ним.
В любом случае, ствол 365 может иметь канал 380, проходящий сквозь него. Гибкий засасывающий элемент 330 может крепиться к нижнему концу ствола 365 под пластиной 95 для создания вакуума с помощью ствола 365 и камеры 45. Согласно аспектам с ФИГ. 17 и 18 приблизительно в центре ствола 365 внутри камеры 45 может быть отверстие 385, сформированное стволом 365 и имеющее соответствующие размеры для создания с помощью камеры 45 достаточного вакуума в канале 380 ствола и гибком засасывающем элементе 330 таким образом, что яйца захватываются и удерживаются гибким засасывающим элементом 330. Отверстие 385 может быть достаточно поднятым над пластиной 95 для предотвращения забивания остатками яиц, собранных на пластине 95, отверстия 385 и/либо канала 380 ствола. В других случаях, как изображено на ФИГ. 19-22, конец 375 ствола 365 может быть достаточно поднятым над пластиной 95 для достижения того же результата таким образом, что проход к каналу ствола поднят над пластиной 95.
Клапанный блок 390 может размещаться возле отверстия 105 пластины 100 для создания в подъемном устройстве 80 положительного воздушного давления. Клапанный блок 390 может иметь фитинг 395, выполненный для приема гибкого трубопровода (не изображен) для соединения клапана с системой 220 для создания положительного воздушного давления. Клапанный блок 390 может содержать вентильный привод 370. Вентильный привод 370 может конфигурироваться для перемещения для контактирования со стволом 365, когда в подъемном устройстве 80 с помощью системы 220 для создания положительного воздушного давления создается положительное воздушное давление. Вентильный привод 370 может обычно смещаться с использованием смещающего элемента 400 таким образом, что ствол 365 и вентильный привод 370 не соединяются на конце 375, как изображено на ФИГ. 17, 19 и 21. Когда в подъемном устройстве 80 создается положительное воздушное давление, то вентильный привод 370 перемещается для запирания ствола 365 для закрывания канала 380 ствола в камере 45, таким образом, прерывая вакуум, созданный внутри гибкого засасывающего элемента 330. Как таковое, яйцо, удерживаемое подъемным устройством 80, может выборочно высвобождаться вследствие потери подсасывающей силы (вакуума), приложенной к нему.
Как изображено на ФИГ. 23, согласно некоторым аспектам переносящая система 10 может предоставляться как часть системы 500 для обработки яиц. В некоторых случаях, система 500 для обработки яиц может содержать in ovo опрыскивательный блок 600, сконфигурированный для выборочного либо невыборочного опрыскивания яиц, проходящих сквозь него, обрабатывающим веществом, таким как, например, вакцины, антибиотики либо витамины. В некоторых случаях, опрыскивательный блок 600 может фактически конфигурироваться для удаления материала с птичьих яиц для разных целей, таких как тестирование и сбор вакцины. Опрыскивательный блок 600 может содержать множество опрыскивательных устройств, которые работают одновременно либо последовательно для опрыскивания множества яиц. Опрыскивательный блок 600 может содержать опрыскивательную насадку, которая содержит опрыскивательные устройства, и при этом каждое опрыскивательное устройство гидравлически сообщено с источником, содержащим обрабатывающее вещество для опрыскивания. Опрыскивательный блок 600 может разрабатываться для работы с коммерческими платформами. Платформы могут подаваться сквозь опрыскивательный блок 600 с помощью автоматизированной конвейерной системы для расположения платформ под опрыскивательной насадкой для опрыскивания яиц, подаваемых таким образом.
В некоторых случаях, in ovo опрыскивание может осуществляться выборочно опрыскивательным блоком 600 таким образом, что обрабатывающее вещество не распыляется на мертвые, бесплодные либо утраченные яйца. По этому поводу, классифицирующее устройство может использоваться для классификации яиц в платформе, подаваемой сквозь опрыскивательный блок 600, как жизнеспособных либо нежизнеспособных, либо утраченных. Как таковые, аспекты данного изобретения могут включать передачу классифицирующей информации, определенной классифицирующим устройством, связанным с опрыскивательным блоком 600, к контроллеру 150 либо непосредственно, либо косвенно таким образом, что на переносящей системе 10 не требуется отдельное классифицирующее устройство. По этому поводу, классифицирующее устройство может располагаться сверху по ходу технологического процесса от опрыскивательного блока 600. Обычно, в некоторых случаях, классифицирующие устройства могут устанавливаться как на опрыскивательном блоке 600 так и на переносящей системе 10.
Многие изложенные здесь модификации и другие аспекты данного изобретения придут на ум специалистам в этой отрасли, которые получат выгоду от информации, представленной в вышеприведенном описании и на соответствующих чертежах. Поэтому, следует понимать, что данное изобретение не ограничивается специальными раскрытыми аспектами и что модификации и другие аспекты предусмотрены для включения в объем правовой защиты приложенной формулы изобретения. Например, выборочное высвобождение яиц может применяться к платформе с яйцами, содержащей более чем две подгруппы яиц. Кроме того, аспекты данного изобретения могут сочетаться с устройством выборочного удаления для выборочного удаления яиц с платформы. Такое устройство выборочного удаления может выполняться, например, для удаления жизнеспособных яиц с платформы с одновременным сохранением нежизнеспособных яиц в платформе для удаления. По этому поводу, подъемные колпачки 80 могут индивидуально управляться, как перед этим описывалось, для создания в каждом гибком засасывающем элементе 330 положительного воздушного давления таким образом, что, когда верхний переносящий блок 70 подымается с платформы 20, то удаляется только часть яиц. То есть подъемные устройства 80 могут создавать положительное воздушное давление таким образом, что на выбранные нежизнеспособные яйца не действует всасывающая сила и, таким образом, они не подымаются, когда подымается верхний переносящий блок 70. Хотя здесь используются специальные термины, они используются только в общем и описательном смысле, а не для ограничения.
Реферат
Группа изобретений относится к системам переноса яиц. Система для обработки яиц (10) содержит контроллер для приема сигнала классификации. Сигнал указывает статус каждого яйца (25) из множества. Яйцесборный транспортер подает яйца. Верхний переносящий блок для удаления множества яиц с транспортера связан с контроллером. Яйца группируют в по меньшей мере первую и вторую подгруппу на основании статуса. Контроллер для управления верхним переносящим блоком выборочно отдельно высвобождает подгруппы яиц на основании статуса. Верхний переносящий блок содержит множество подъемных устройств (80) для индивидуального и выборочного высвобождения удерживаемого яйца. Для обработки яиц транспортируют множество яиц в лотке (30) транспортера к классифицирующему устройству (60). Классифицируют яйца для присвоения каждому яйцу статуса и связывают с одной из первой и второй подгрупп. Передают статус яйца контроллеру для управления верхним переносящим блоком (70). Одновременно удаляют первую и вторую подгруппу яиц с лотка транспортера множеством подъемных устройств верхнего переносящего блока. Выборочно высвобождают одну подгруппу с подъемных устройств. Высвобождают другую подгруппу с подъемных устройств верхнего переносящего блока. Обеспечивается выборочная сортировка и перенос яиц согласно классификации. 2 н. и 16 з.п. ф-лы, 25 ил.
Формула
Документы, цитированные в отчёте о поиске
Способ обработки яиц (варианты)
Способ и устройство для контроля автоматического удаления яиц
Комментарии