Способ и устройство для контроля автоматического удаления яиц - RU2436295C1
Код документа: RU2436295C1
Чертежи














Описание
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
Настоящая заявка является частичным продолжением патентной заявки США №11/859285, поданной 21 сентября 2007 г., все содержание которой полностью включено в настоящий документ посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится в целом к устройству для перемещения яиц и в частности к устройству и способам контроля перемещения яиц.
УРОВЕНЬ ТЕХНИКИ
Яйца, из которых должны выводиться цыплята для получения живой домашней птицы, обычно подвергаются овоскопированию (проверке просвечиванием) при эмбриональном развитии для определения неоплодотворенных, гнилых и мертвых яиц (собирательно называемых «неживыми яйцами»). Неживые яйца обычно удаляются из инкубатора для увеличения доступного пространства инкубатора. Кроме того, удаление неживых яиц может увеличить коэффициент выведения цыплят на 2,0% в старых партиях (возраст партии: 58-62 недель). Такое улучшение выведения цыплят может привести к непосредственному экономическому эффекту, составляющему приблизительно 0,002-0,004 доллара США на каждого птенца в США.
Во многих случаях в живое яйцо перед выведением из него цыпленка требуется ввести какое-либо вещество. Развитие эмбриологии домашней птицы сделало возможным добавление различных материалов в эмбрион или в среду, окружающую эмбрион в птичьем яйце, с целью получения стимулирующих благоприятных воздействий на выведенного впоследствии птенца. Такие благоприятные воздействия включают улучшение роста, предупреждение заболеваний, увеличение процента выведения птенцов при высиживании нескольких яиц и прочие улучшения физических свойств выведенной домашней птицы. Кроме того, определенные типы прививок, которые ранее могли быть сделаны только либо недавно выведенной, либо полностью зрелой домашней птице, могут теперь успешно делаться эмбрионам птенцов. Примеры веществ, которые используются или предложены для инъекции в зачаточном состоянии, включают вакцины, антибиотики и витамины. Вещества для обработки в зачаточном состоянии и способы их инъекции в зачаточном состоянии описаны, например, в патенте США №4458630 (Шарма и др.) и в патенте США №5028421 (Федериксен и др.).
К сожалению, может быть нежелательным осуществлять прививки в каждое яйцо, находящееся в контейнере для яиц. Например, неоплодотворенные яйца - это яйца, которые не содержат эмбриона, и, таким образом, из них впоследствии невозможно вывести птенцов. Неоплодотворенные яйца традиционно удаляются до выполнения инъекций в зачаточном состоянии, потому что осуществление прививок в неоплодотворенные яйца в целом не имеет смысла и считается расточительным. Кроме того, в неоплодотворенных яйцах, в которые была введена инъекция, может развиться плесень, таким образом, увеличивается риск нежелательного загрязнения других яиц и выведенных птенцов. Кроме того, привитые неоплодотворенные яйца могут увеличить риск загрязнения из-за вытекающего из них альбумина. Мертвые и гнилые яйца также традиционно удаляются до выполнения инъекции. Таким образом, требуется быстро распознать и удалить неживые яйца из контейнера яиц до выполнения внутризародышевых прививок с помощью автоматических прививочных устройств.
При производстве вакцин вируса гриппа человека зародыши вирусов вводятся в живые яйца, и затем три дня спустя из яиц получают дозы вирусного материала. Мертвые или гнилые яйца могут загрязнить дозы вируса, отобранного из живых яиц, так что надежное удаление обнаруженного неживого яйца имеет большую важность для сведения к минимуму загрязнения и биологического груза в отобранных культурах вирусов. Вероятны сбои системы удаления, так как в яйцах имеются отверстия, через которые производились инъекции, и липкое содержимое яйца, которое выступает наружу через пробитое отверстие, имеет тенденцию закупоривать вакуумные линии устройства для удаления яиц. В этих устройствах обычно удаляется небольшое количество яиц, примерно 2-5%, а доступ человека к операциям сбора доз некоторых типов вакцин гриппа сильно ограничен, так что надежное удаление яиц имеет значение как с экономической точки зрения, так и с точки зрения здоровья персонала.
Также может быть необходимо выборочно удалять из контейнера яйца других типов. Например, может быть необходимо удалять все мужские яйца, все женские яйца и т.д. Как другой пример, может быть необходимо удалить все живые яйца, чтобы переместить их в другой контейнер или инъекционное устройство.
Традиционные устройства для обработки яиц удаляют яйца из контейнера, захватывая их при помощи вакуумных присосок вакуумного устройства. Вакуумная присоска обычно поднимает яйца вертикально из контейнера и переносит их к месту назначения. Традиционное устройство 10 для удаления яиц 12 из контейнера 14 показано на фиг.1. Несколько устройств 16 для сбора яиц выполнены с возможностью вхождения в контакт с обращенными вверх частями отдельных яиц 12, находящихся в контейнере 14, и удерживания яиц при помощи вакуума, перемещая их при этом в приемный контейнер 18.
Иногда яйца, подлежащие удалению из контейнера, не могут быть удалены при помощи устройства для удаления яиц. Например, яйцо может быть сильно зажато в ячейке контейнера. Кроме того, пролитое содержимое яйца или другие посторонние вещества могут служить в качестве клеящего вещества, которое приклеивает яйцо к ячейке контейнера. Традиционные вакуумные устройства могут быть не способны удалить яйцо из контейнера и по другим причинам. Например, вакуумная присоска вакуумного устройства не может разместиться соответствующим образом на яйце, либо может иметь место неплотное прилегание присоски из-за наличия перьев либо прочих частиц на яичной скорлупе, или из-за трещин в яичной скорлупе. Кроме того, вакуумное устройство может быть не в состоянии удалить яйцо по причине недостаточного вакуума, что может быть вызвано различными причинами, такими как порванная вакуумная присоска, засоренная трубка Вентури или вакуумная линия и т.д. К сожалению, традиционные системы удаления яиц не имеют возможности обнаружения ситуации, когда яйцо, которое должно быть удалено из контейнера, на самом деле не удалено.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
С учетом вышеизложенного предложены способ и устройство для автоматического определения того, удалены ли яйца, предназначенные для удаления из контейнера. Согласно некоторым вариантам выполнения настоящего изобретения способ удаления яйца из контейнера включает испускание светового луча вдоль траектории над держателем для яиц и вдоль него, перемещение устройства для сбора яиц (и/или узла, поддерживающего устройство для сбора яиц) из первого положения во второе положение в контакте с яйцом в контейнере и обратно в первое положение, при этом устройство для сбора яиц входит в контакт с яйцом во втором положении и удаляет яйцо из контейнера при перемещении из второго положения в первое положение, измерение интервала времени, в течение которого траектория света заблокирована, когда устройство для сбора яиц перемещается из первого положения во второе положение и обратно в первое положение, и генерирование сигнала на основании продолжительности интервала времени блокирования траектории света, который указывает на то, удалено ли яйцо из держателя для яиц, тем самым идентифицируя ситуацию, когда устройство для сбора яиц не работает должным образом.
В некоторых вариантах выполнения изобретения генерируют сигнал, который указывает на то, что яйцо не удалено из держателя, когда измеренный интервал времени, в течение которого траектория света заблокирована, меньше заданного интервала времени. Может генерироваться сигнал, который указывает на то, что яйцо удалено из держателя, когда измеренный интервал времени, в течение которого траектория света заблокирована, больше заданного интервала времени. В некоторых вариантах выполнения изобретения в ответ на генерирование сигнала, указывающего на то, что яйцо не удалено из держателя, активируют сигнализацию.
Согласно другим вариантам выполнения настоящего изобретения способ удаления яйца из держателя включает контроль траектории светового луча над держателем и вдоль него, перемещение устройства для сбора яиц (и/или узла, поддерживающего устройство для сбора яиц) из первого положения во второе положение в контакте с яйцом в контейнере и обратно в первое положение, при этом устройство для сбора яиц входит в контакт с яйцом во втором положении и удаляет яйцо из контейнера при перемещении из второго положения в первое положение, измерение интервала времени, в течение которого траектория светового луча заблокирована, когда устройство для сбора яиц перемещается из первого положения во второе положение и обратно в первое положение, и генерирование сигнала на основании интервала времени, в течение которого траектория светового луча заблокирована, который указывает на то, удалено ли яйцо из держателя для яиц, тем самым идентифицируя ситуацию, когда устройство для сбора яиц не работает должным образом.
В некоторых вариантах выполнения изобретения генерируют сигнал, который указывает на то, что яйцо не удалено из держателя, когда измеренный интервал времени, в течение которого траектория светового луча заблокирована, меньше заданного интервала времени. Может генерироваться сигнал, который указывает на то, что яйцо удалено из держателя, когда измеренный интервал времени, в течение которого траектория светового луча заблокирована, больше заданного интервала времени. В некоторых вариантах выполнения изобретения в ответ на генерирование сигнала, указывающего на то, что яйцо не удалено из держателя, активируют сигнализацию.
Согласно другим вариантам выполнения настоящего изобретения устройство для удаления яиц из держателя для яиц содержит устройство для сбора яиц, которое выполнено с возможностью перемещения между первым положением и вторым положением в контакте с яйцом, находящимся в держателе, источник света, который расположен с одной стороны держателя и который испускает свет по траектории над держателем и вдоль него, и детектор света, расположенный с противоположной стороны держателя. Устройство для сбора яиц входит в контакт с яйцом во втором положении и удаляет яйцо из держателя при перемещении из второго положения в первое положение. Детектор света измеряет интервал времени, в течение которого траектория светового луча заблокирована, когда устройство для сбора яиц перемещается из первого положения во второе положение и обратно в первое положение. Детектор света генерирует сигнал на основании продолжительности интервала времени, в течение которого траектория светового луча заблокирована, который указывает на то, удалено ли яйцо из держателя, тем самым идентифицируя ситуацию, когда устройство для сбора яиц не работает должным образом.
В некоторых вариантах выполнения изобретения детектор света генерирует сигнал, который указывает на то, что яйцо не удалено из держателя, если измеренный интервал времени, в течение которого траектория светового луча заблокирована, меньше заданного интервала времени. Может генерироваться сигнал, который указывает на то, что яйцо удалено из держателя, когда измеренный интервал времени, в течение которого траектория светового луча заблокирована, больше заданного интервала времени. В некоторых вариантах выполнения изобретения в ответ на генерирование сигнала, который указывает на то, что яйцо не удалено из держателя, активируется сигнализация.
Согласно другим вариантам выполнения настоящего изобретения устройство для удаления яиц из держателя для яиц содержит устройство для сбора яиц, выполненное с возможностью перемещения между первым положением над держателем и вторым положением в контакте с яйцом в держателе, и камеру, расположенную с одной стороны держателя, которая фиксирует световой луч, проходящий над держателем и вдоль него. Устройство для сбора яиц входит в контакт с яйцом во втором положении и удаляет яйцо из держателя при перемещении из второго положения в первое положение. Камера выполнена с возможностью измерения интервала времени, в течение которого траектория светового луча заблокирована, когда устройство для сбора яиц перемещается из первого положения во второе положение и обратно в первое положение. Камера генерирует сигнал на основании продолжительности интервала времени, в течение которого траектория светового луча заблокирована, который указывает на то, удалено ли яйцо из держателя.
В некоторых вариантах выполнения изобретения камерой генерируется сигнал, который указывает на то, что яйцо не удалено из держателя, когда измеренный интервал времени, в течение которого траектория светового луча заблокирована, меньше заданного интервала времени. Камерой может генерироваться сигнал, который указывает на то, что яйцо удалено из держателя, когда измеренный интервал времени, в течение которого траектория светового луча заблокирована, больше заданного интервала времени. В некоторых вариантах выполнения изобретения в ответ на генерирование сигнала, указывающего на то, что яйцо не удалено из держателя, активируется сигнализация.
Согласно другим вариантам выполнения настоящего изобретения устройство для удаления яиц из держателя для яиц содержит устройство для сбора яиц, выполненное с возможностью перемещения между первым положением над держателем и вторым положением в контакте с яйцом в держателе, и детектор, расположенный смежно с держателем. Детектор выполнен с возможностью контроля траектории над держателем и вдоль него и изменения интервала времени, в течение которого траектория светового луча заблокирована, когда устройство для сбора яиц перемещается из первого положения во второе положение и обратно в первое положение. Детектор выполнен с возможностью генерирования сигнала на основании продолжительности интервала времени, в течение которого траектория светового луча заблокирована, который указывает на то, удалено ли яйцо из держателя. Например, детектор может быть выполнен с возможностью генерирования сигнала, указывающего на то, что яйцо не удалено из держателя, когда измеренный интервал времени, в течение которого траектория светового луча заблокирована, меньше заданного интервала времени. Детектор может быть выполнен с возможностью генерирования сигнала, который указывает на то, что яйцо удалено из держателя, когда измеренный интервал времени, в течение которого траектория светового луча заблокирована, больше заданного интервала времени.
Согласно некоторым вариантам выполнения настоящего изобретения способ детектирования работающего со сбоями устройства для сбора яиц, предназначенного для удаления яиц из держателя, включает подсчет числа неудачных попыток устройства для сбора яиц удалить яйцо, предназначенное для удаления из держателя, и генерирование сигнала, который указывает на то, что устройство для сбора яиц работает со сбоями, когда количество попыток удаления превышает заданное количество и/или заданный процент.
Согласно некоторым вариантам выполнения настоящего изобретения способ детектирования работающего со сбоями устройства для сбора яиц, предназначенного для удаления яиц из держателя, включает определение конкретного устройства для сбора яиц в ряду, которое не смогло удалить яйцо, путем комбинирования информации о том, что яйцо не было захвачено из ряда с помощью конкретного устройства для сбора яиц, находящегося в этом ряду и активированного для захвата яйца, и подсчета количества неудачных попыток устройства для сбора яиц удалить яйцо, предназначенное для удаления из держателя, и генерирование сигнала, указывающего на то, что устройство для сбора яиц работает со сбоями, когда количество попыток превышает заданное количество и/или заданный процент.
Согласно некоторым вариантам выполнения настоящего изобретения способ детектирования работающего со сбоями устройства для сбора яиц в устройстве для удаления яиц из держателя включает подсчет с помощью оптической системы, расположенной смежной с держателем, количества неудачных попыток любого устройства для сбора яиц удаления яйца, предназначенного для удаления из держателя, и генерирование сигнала, который указывает на то, что устройство для сбора яиц работает со сбоями, когда количество попыток удаления превышает заданное количество. Оптическая система может представлять собой, например, камеру, расположенную над или под держателем.
В другом аспекте изобретения устройство для детектирования работающего со сбоями устройства для сбора яиц содержит устройство для сбора яиц, выполненное с возможностью перемещения между первым и вторым положениями в контакте с яйцом в держателе. Устройство для сбора яиц выполнено с возможностью вхождения в контакт с яйцом во втором положении и удаления яйца из держателя при перемещении из второго положения в первое положение. Устройство для детектирования количества яиц в держателе для яиц, когда держатель для яиц находится в указанном положении, расположено смежно с устройством для сбора яиц. Устройство управления электрически осуществляет связь с устройством для сбора яиц и устройством для детектирования и управляет ими. Устройство управления принимает данные от устройства для детектирования, чтобы вычислить количество яиц в держателе, и определяет, когда количество яиц в держателе для яиц отличается на заданную величину от заданного для держателя для яиц расчетного количества яиц.
В одном связанном аспекте устройство управления генерирует сигнал, указывающий на случай, когда количество яиц в держателе для яиц отличается на заданную величину от расчетного количества яиц. Устройство может также включать сигнализацию, осуществляющую связь с устройством управления и активируемую путем генерирования сигнала. Устройство управления может сопоставлять держатель для яиц по меньшей мере с одним устройством для сбора яиц, когда количество яиц в держателе для яиц отличается на заданную величину от расчетного количества яиц, а сигнал идентифицирует устройство для сбора яиц. Кроме того, сигнал может указать на то, что сопоставленное устройство для сбора яиц работает со сбоями. Кроме того, используется число яиц в каждом ряду или столбце держателя для яиц для определения случая, когда количество яиц в держателе отличается на заданную величину от расчетного количества яиц. Кроме того, для определения заданного расчетного количества яиц может использоваться количество яиц, отсутствующих в держателе перед тем, как устройство для сбора яиц войдет в контакт с конкретным яйцом. Устройство для детектирования может быть расположено над держателем для яиц и может включать оптическую систему для определения количества яиц в держателе. Оптическая система может включать отражательные детекторы. Устройство может также включать подвижный конвейер, транспортирующий несколько держателей для яиц в конкретное место, находящееся в зоне устройства для сбора яиц, после удаления конкретных яиц устройством для сбора яиц. Устройство для детектирования может детектировать количество яиц в ряду держателя для яиц по мере перемещения держателя для яиц мимо устройства для детектирования с заданной скоростью. Устройство управления может вычислять положение каждого яйца и каждого пустого места в держателе для яиц, детектированного устройством для детектирования. Устройство управления может генерировать сигнал, когда устройство для сбора яиц пропустило по меньшей мере два яйца.
В другом аспекте изобретения способ детектирования работающего со сбоями устройства для сбора яиц включает этап перемещения устройства для сбора яиц между первым и вторым положениями в контакте с яйцом, находящимся в держателе, причем устройство для сбора яиц выполнено с возможностью вхождения в контакт с указанным яйцом во втором положении и удаления этого яйца из держателя при перемещении из второго положения в первое положение, этап детектирования количества яиц в держателе для яиц с помощью устройства для детектирования, этап сравнения количества яиц в держателе для яиц с заданным расчетным количеством яиц для держателя для яиц с помощью устройства управления, электрически осуществляющего связь с устройством для сбора яиц и устройством для детектирования, этап определения с помощью устройства управления ситуации, когда количество яиц в держателе для яиц отличается на заданную величину расчетного количества яиц.
В одном связанном аспекте способ также включает генерирование сигнала с помощью устройства управления, который указывает на случай, когда количество яиц в держателе для яиц отличается на заданную величину от расчетного количества яиц. Еще в одном связанном аспекте способ также включает сопоставление держателя для яиц по меньшей мере с одним устройством для сбора яиц, когда количество яиц в держателе для яиц отличается на заданную величину от расчетного количества яиц, причем сигнал указывает на то, что по меньшей мере одно сопоставленное устройство для сбора яиц работает со сбоями. Способ может включать также этап расположения устройства для детектирования, имеющего оптическую систему, над держателем для яиц и этап определения количества яиц в держателе для яиц с помощью оптической системы. Способ может включать также этап расположения устройства для детектирования, включающего оптическую систему с детекторами, над держателем для яиц и этап подсчета количества яиц в держателе для яиц с помощью детекторов. Кроме того, способ может включать перемещение нескольких держателей для яиц мимо устройства для детектирования с заданной скоростью. Способ также может включать вычисление положения каждого яйца и каждого пустого места в держателе для яиц, детектированного устройством для детектирования. Устройство управления может генерировать сигнал, когда устройство для сбора яиц пропустило по меньшей мере два яйца.
В другом аспекте изобретения система для детектирования работающего со сбоями устройства для сбора яиц детектирует работающее со сбоями устройство для сбора яиц. Устройство для сбора яиц выполнено с возможностью перемещения между первым и вторым положениями в контакте с яйцом, находящимся в держателе. Устройство для сбора яиц выполнено с возможностью вхождения в контакт с указанным яйцом во втором положении и удаления этого яйца из держателя при перемещении из второго положения в первое положение. Устройство для детектирования выполнено с возможностью детектирования количества яиц в держателе для яиц, когда держатель для яиц находится в указанном положении, смежном с устройством для сбора яиц. Устройство управления электрически осуществляет связь с устройством для сбора яиц и устройством для детектирования. Устройство для детектирования принимает данные из устройства для детектирования для вычисления количества яиц, находящихся в держателе для яиц. Устройство управления определяет ситуацию, когда количество яиц в держателе для яиц отличается на заданную величину от заданного расчетного количества яиц для держателя для яиц. Устройство управления генерирует сигнал, указывающий на случай, когда количество яиц в держателе для яиц отличается на заданную величину от расчетного количества яиц. Устройство управления сопоставляет держатель для яиц по меньшей мере с одним устройством для сбора яиц, когда количество яиц в держателе для яиц отличается на заданную величину от расчетного количества яиц, а сигнал идентифицирует устройство для сбора яиц. Подвижная конвейерная система транспортирует держатели для яиц в указанное положение, смежное с устройством для сбора яиц после удаления устройством для сбора яиц указанных яиц.
В одном связанном аспекте система для детектирования дополнительно содержит сигнализацию, осуществляющую связь с устройством управления и активируемую путем генерирования сигнала. Устройство для детектирования может детектировать количество яиц в ряду держателя для яиц по мере перемещения держателя для яиц мимо устройства для детектирования с заданной скоростью. Устройство управления вычисляет положение каждого яйца и каждого пустого места в держателе для яиц, детектированного устройством для детектирования. Устройство управления может также генерировать сигнал, когда устройство для сбора яиц пропустило по меньше мере два яйца.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Эти и другие цели, особенности и преимущества настоящего изобретения станут очевидны из последующего подробного описания иллюстративных вариантов выполнения настоящего изобретения, которые должны рассматриваться вместе с сопроводительными чертежами, на которых:
фиг.1 представляет собой традиционное устройство для удаления яиц из контейнера;
фиг.2А представляет собой вид сверху контейнера с находящимися в нем яйцами;
фиг.2В представляет собой вид сбоку контейнера, показанного на фиг.2А, в направлении 2В;
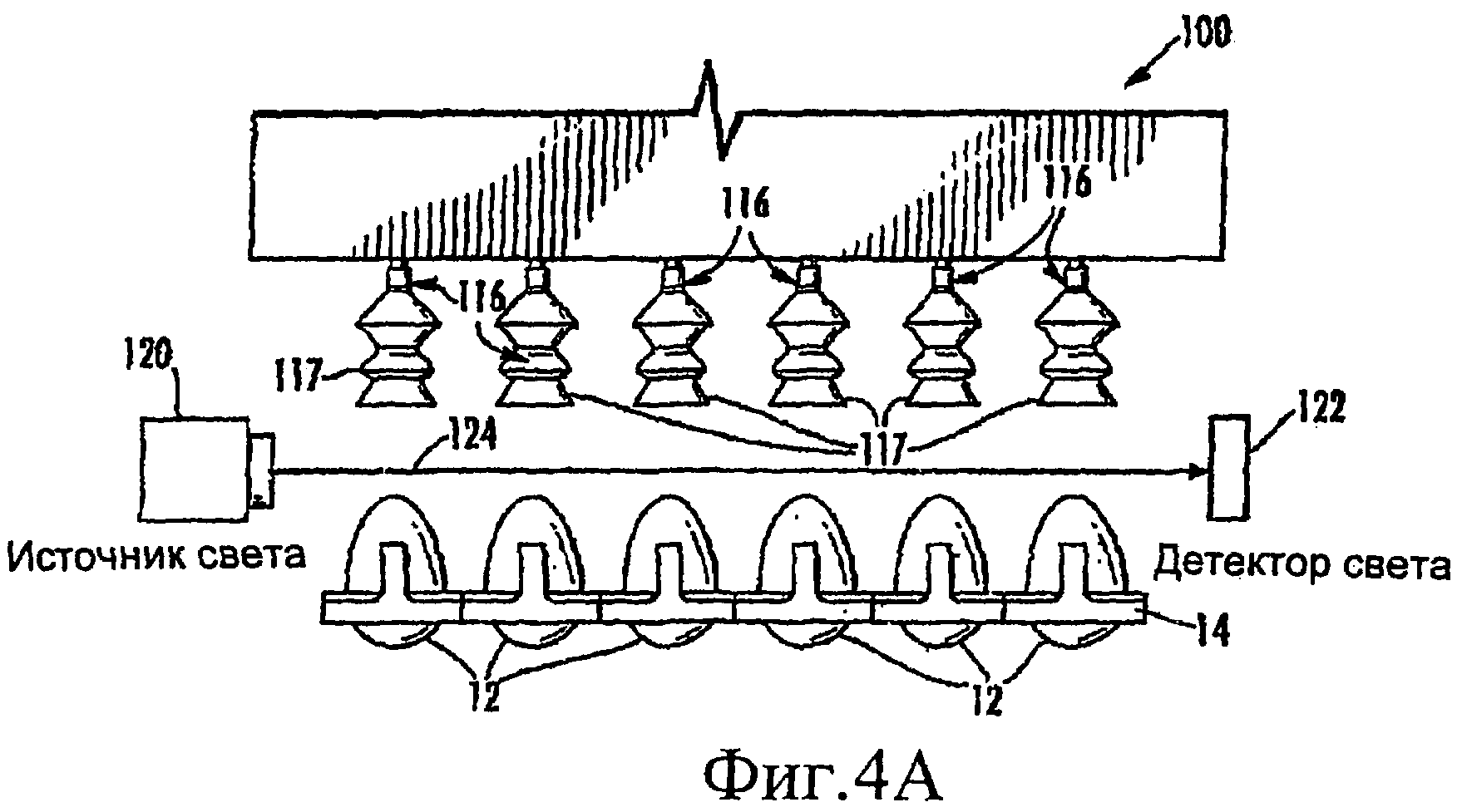
фиг.3А-3С и 4А-4С поясняют согласно некоторым вариантам выполнения настоящего изобретения способы и устройство для определения того, удалены ли яйца, предназначенные для удаления из контейнера;
фиг.5 и 6 поясняют согласно другим вариантам выполнения настоящего изобретения способы и устройство для определения того, удалены ли яйца, предназначенные для удаления из контейнера;
фиг.7 представляет собой вид сверху контейнера для яиц с несколькими источниками света, расположенными с одной стороны контейнера, и несколькими детекторами света, расположенными с противоположной стороны контейнера, в соответствии с некоторыми вариантами выполнения настоящего изобретения;
фиг.8 представляет собой вид сверху контейнера для яиц с несколькими камерами, размещенными с одной стороны контейнера, в соответствии с некоторыми вариантами выполнения настоящего изобретения;
фиг.9 представляет собой структурную схему системы для обработки яиц в соответствии с некоторыми вариантами выполнения настоящего изобретения;
фиг.10 представляет собой вид сбоку устройства для сбора яиц, включающего устройство для детектирования согласно варианту выполнения изобретения;
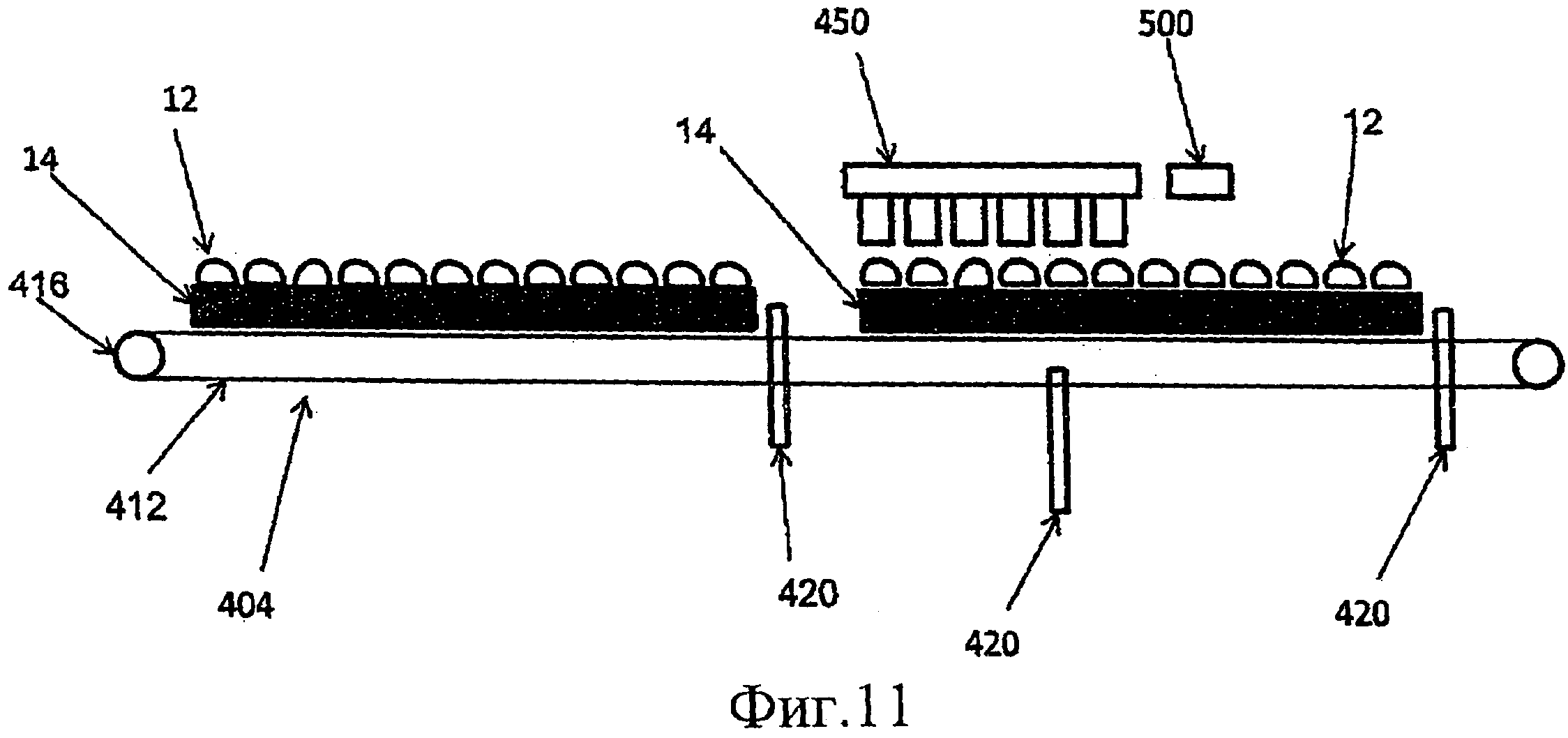
фиг.11 представляет собой подробный вид устройства для сбора яиц, показанного на фиг.10, включая контейнеры для яиц; и
фиг.12 представляет собой структурную схему установки для обработки яиц согласно варианту выполнения настоящего изобретения, в которой используется устройство для детектирования согласно настоящему изобретению, показанное на фиг.10 и 11.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Данное изобретение описано далее более подробно со ссылкой на сопроводительные чертежи, на которых показаны предпочтительные варианты выполнения изобретения. Тем не менее данное изобретение может быть выполнено в различных формах и не должно рассматриваться как ограниченное вариантами выполнения, изложенными в настоящем документе, скорее приведенные варианты выполнения представлены для того, чтобы описание изобретения было полным и завершенным и полностью передавало объем изобретения для специалистов в данной области техники.
Одинаковыми ссылочными номерами позиций обозначаются одни и те же конструктивные элементы во всем тексте описания. На чертежах толщина определенных линий, слоев, компонентов, элементов или деталей может быть увеличена для ясности. Пунктирные линии поясняют дополнительные особенности или режимы работы, если не указано иное. Все публикации, патентные заявки, патенты и прочие ссылки, упомянутые в настоящем документе, полностью включены в настоящее описание посредством ссылки.
Используемая в настоящем документе терминология применяется только с целью описания отдельных вариантов выполнения изобретения и не предназначена для ограничения изобретения. Используемые в настоящем документе формы единственного числа подразумевают также и использование точно таким же образом множественного числа, если в контексте явно не указано иное. Следует также понимать, что термины «включает» и/или «включающий», когда они используются в настоящем описании, определяют наличие заявленных особенностей, этапов, операций, элементов и/или компонентов, но не препятствуют присутствию или добавлению одной или нескольких других особенностей, этапов, операций, элементов, компонентов и/или их групп. Используемый в настоящем документе союз «и/или» включает любые и все комбинации одного или большего количества связанных перечисленных пунктов. Такие используемые в настоящем документе фразы, как «между Х и Y» и «приблизительно между Х и Y», предполагают включение Х и Y. Такие используемые в настоящем документе фразы, как «приблизительно между Х и Y», означают «между приблизительно Х и приблизительно Y». Такие используемые в настоящем документе фразы, как «приблизительно от Х до Y», означают «от приблизительно Х до приблизительно Y».
Если не определено иное, все термины (включая технические и научные термины), используемые в настоящем документе, имеют то же самое значение, которое они имеют для специалистов в данной области техники. Кроме того, следует понимать, что термины, определенные в широко используемых словарях, должны толковаться как имеющие значение, совместимое с их значением в контексте настоящего описания и соответствующей областью техники, и не должны толковаться в идеализированном или сугубо формальном смысле, если это не определено в настоящем документе в явном виде. Широко известные функции или конструкции могут не описываться подробно для краткости и/или ясности изложения.
Следует понимать, что когда элемент упоминается как находящийся «на», «прикрепленный к», «подключенный к», «соединенный с», «входящий в контакт» и т.д. с другим элементом, он может либо непосредственно находиться на, быть прикрепленным к, быть подключенным к, быть соединенным с или входить в контакт с другим элементом, либо могут также присутствовать промежуточные элементы. Напротив, когда элемент упоминается как, например, «находящийся непосредственно на», «прикрепленный непосредственно к», «подключенный непосредственно к», «соединенный непосредственно с» или «входящий в контакт непосредственно» с другим элементом, промежуточные элементы отсутствуют. Специалистам в данной области очевидно, что ссылки на конструкцию или элемент, который расположен «смежно» с другим элементом, могут включать части, которые перекрывают или находятся под смежным элементом.
Слова пространственного отношения, такие как «под», «ниже», «нижний», «над», «верхний» и т.п., могут использоваться в настоящем документе для простоты описания, чтобы описать один элемент или взаимосвязи элемента с другим элементом (элементами) или деталью (деталями), как показано на чертежах. Следует, что термины пространственного отношения используются для того, чтобы охватить различные ориентации устройства при его использовании или при работе, в дополнение к ориентации, изображенной на чертеже. Например, если бы устройство, показанное на чертеже, было перевернуто, то элементы, описанные как находящиеся «под» или «ниже» других элементов или деталей, находились бы в этом случае «над» другими элементами или деталями. Таким образом, иллюстративный термин «под» может также охватывать и расположение «над». Устройство может быть ориентировано иначе (повернуто на 90 градусов или находится в другом положении), поэтому термины пространственного отношения, используемые в настоящем документе, в таком случае должны пониматься соответствующим образом. Точно так же, термины «вверх», «вниз», «вертикальный», «горизонтальный» и т.п. используются в настоящем документе только с целью иллюстрации, если специально не указано иное.
Следует понимать, что хотя термины «первый», «второй» и т.д. могут быть использованы в настоящем документе для описания различных элементов, компонентов, областей, уровней и/или разрезов, эти элементы, компоненты, области, уровни и/или разрезы не должны ограничиваться этими условиями. Эти термины используются только для того, чтобы отличить один элемент, компонент, область, уровень или разрез от другого элемента, компонента, области, уровня или разреза. Таким образом, «первый» элемент, компонент, область, уровень или разрез, обсуждаемые ниже, могут быть также названы «вторым» элементом, компонентом, областью, уровнем или разрезом без отклонения от идеи настоящего изобретения. Последовательность операций (или этапов) не ограничена порядком, представленным в формуле изобретения или на чертежах, если специально не указано иное.
Специалистам в данной области техники известно, что яйца инкубируются и обрабатываются в держателе, например контейнере для яиц. Контейнеры могут иметь любое количество рядов, например семь рядов яиц, при этом контейнеры с шестью и семью рядами наиболее распространены. Кроме того, яйца в смежных рядах могут находиться параллельно друг другу, как в «прямоугольном» контейнере, либо могут располагаться в шахматном порядке, как в «сдвинутом» контейнере. Примеры соответствующих промышленных контейнеров включают в том числе контейнер «CHICKMASTER 54», контейнер «JAMESWAY 42» и контейнер «JAMESWAY 84» (в каждом случае число в названии обозначает количество яиц, которое вмещает контейнер). Контейнеры для яиц хорошо известны специалистам в данной области, и нет необходимости описывать в настоящем документе их конструкцию.
Термин «устройство для сбора яиц» относится к любому типу устройства, выполненному с возможностью удаления яйца из ячейки держателя для яиц, например контейнера для яиц.
Термины «контейнер» и «держатель» используются в настоящем документе как взаимозаменяемые. Кроме того, варианты выполнения настоящего изобретения могут быть использованы с устройством любого типа, выполненного с возможностью транспортировки нескольких яиц. Термин «держатель» включает все подобные устройства. На фиг.2А показан вид сверху иллюстративного держателя 14 для яиц, содержащего массив яиц 12, который используется для пояснения различных вариантов выполнения настоящего изобретения. На фиг.2В показан вид сбоку держателя 14 для яиц, изображенного на фиг.2А, показанный вдоль линии 2В-2В.
На фиг.3А-3С и 4А-4С согласно некоторым вариантам выполнения настоящего изобретения поясняются способы и устройство для определения того, действительно ли удалены яйца, предназначенные для удаления из держателя для яиц. На фиг.3А изображено устройство 100 для удаления яиц, которое включает несколько устройств 116 для сбора яиц для каждого ряда держателя 14 для яиц. Устройства 116 для сбора яиц выполнены с возможностью перемещения между первым положением (фиг.3А) и вторым положением, входя в контакт с соответствующими несколькими яйцами в держателе 14 (фиг.3В). В показанном варианте выполнения изобретения устройства 116 для сбора яиц выполнены с возможностью перемещения по отдельности между соответствующим первым (то есть верхним) и вторым (то есть нижним) положениями. Однако варианты выполнения настоящего изобретения могут использоваться с устройствами для удаления яиц, в которых устройства для сбора яиц не перемещаются по отдельности, то есть в которых несколько или все устройства для сбора яиц перемещаются между первым и вторым положениями совместно, например в которых устройства для сбора яиц перемещаются посредством перемещения устройства 100 для удаления яиц. В других вариантах выполнения изобретения перемещение устройства 116 для сбора яиц может обеспечиваться с помощью комбинации индивидуальных перемещений устройства для сбора яиц и устройства 100 для удаления яиц. Другими словами, перемещение устройства 116 для сбора яиц, обсуждаемое в настоящем документе для различных вариантов выполнения изобретения, может быть индивидуальным перемещением устройства для сбора яиц, перемещением устройства 100 для удаления яиц либо комбинацией перемещения устройства 100 для удаления яиц и индивидуального перемещения устройства 116 для сбора яиц.
Перемещение устройства 116 для сбора яиц, описанное в настоящем документе для различных вариантов выполнения изобретения, не ограничивается по существу вертикальным перемещением относительно держателя 14 для яиц. Первое положение устройства для сбора яиц может находиться сбоку от держателя для яиц. Другими словами, устройство для сбора яиц может перемещаться из положения, смежного с положением держателя 14, входить в контакт яйцом и затем возвращаться в положение, находящееся сбоку относительно держателя 14 для яиц, для отпускания удаленного яйца. Перемещение устройства для сбора яиц, таким образом, не ограничивается перемещением, показанным на чертежах.
Каждое показанное устройство 116 для сбора яиц выполнено с возможностью вхождения в контакт с соответствующим яйцом 12 при нахождении во втором положении и удалении яйца 12 из держателя 14 при перемещении из второго положения в первое положение. Каждое показанное устройство 116 для сбора яиц имеет гибкую присоску 117, которая выполнена с возможностью вхождения в контакт и удержания яйца, находясь на нем, когда в гибкой присоске 117 создается давление ниже атмосферного, что известно специалистам в области устройств для удаления яиц.
Каждый держатель 14 снабжен парой, состоящей из источника 120 света, и детектора 122 света (см. фиг.7). Источники 120 света расположены с одной стороны держателя 14, как показано на чертеже. Каждый источник 120 света испускает свет по траектории, проходящей поверх соответствующего ряда держателя 14 и через него. Детекторы 122 света расположены с противоположной стороны держателя 14. Каждый детектор 122 света выполнен с возможностью измерения интервала времени, в течение которого блокируется соответствующая траектория света, когда устройство 116 для сбора яиц, связанное с соответствующим рядом, перемещается из первого положения во второе положение и обратно в первое положение.
Например, на фиг.3А источник 120 света испускает по траектории 124 свет, который детектируется детектором 122 света. Траектория света не блокируется ни одним из приспособлений 116 для сбора яиц или яйцами 12, потому что ни одно из приспособлений для сбора яиц не перемещено вниз во второе положение для удаления яйца. На фиг.3В второе устройство 116 для сбора яиц опущено для удаления второго яйца в ряду (яйца, предназначенного для удаления), и гибкая присоска 117 приспособления 116 для сбора яиц блокирует траекторию света. Яйцо входит в контакт с устройством 116 для сбора яиц, когда устройство 116 для сбора яиц достигает второго положения и затем перемещается вверх в первое положение для перемещения удаленного яйца. Как показано на фиг.3С, яйцо, удаленное устройством 116 для сбора яиц, блокирует траекторию света, когда устройство 116 для сбора яиц находится во втором положении. Поэтому, когда яйцо успешно удалено из держателя 14 для яиц, траектория 124 света заблокирована, когда устройство 116 для сбора яиц перемещается вниз во второе положение и затем обратно в первое положение.
Если яйцо не входит в контакт с устройством 116 для сбора яиц (то есть приспособлению для сбора яиц не удается удалить яйцо из держателя), траектория 124 света не заблокирована, так как гибкая присоска 117 приспособления для сбора яиц переместилась вверх за пределы траектории света во второе положение, как показано на фиг.4С. На фиг.4А-4С показана последовательность неудачного удаления яйца из держателя 14. Как показано, если яйцо, предназначенное для удаления, не удалено успешно из держателя для яиц, траектория света блокируется в течение меньшего интервала времени по сравнению со случаем, когда яйцо успешно удалено. Таким образом, детектор 122 света для каждого ряда держателя 14 может быстро определить, действительно ли удалены яйца, предназначенные для удаления, на основании того, меньше ли измеренный интервал времени, в течение которого траектория света блокирована, заданного интервала времени. Этот заданный интервал времени может быть определен путем опускания и подъема одного или нескольких приспособлений 116 для сбора яиц при отсутствии яиц в держателе, например, при инициализации устройства для удаления яиц.
Согласно некоторым вариантам выполнения настоящего изобретения каждый детектор света 122 выполнен с возможностью генерирования сигнала, который указывает на то, действительно ли удалены яйца, предназначенные для удаления из ряда, на основании длительности интервала времени, в течение которого заблокирована соответствующая траектория 124 света. Например, каждый детектор 122 света может генерировать сигнал, который указывает на то, что яйца в соответствующем ряду, предназначенные для удаления, были удалены из держателя 14, когда измеренный интервал времени, в течение которого траектория света заблокирована, больше заданного интервала времени. Также каждый детектор 122 света может генерировать сигнал, который указывает на то, что одно или несколько яиц, предназначенных для удаления из соответствующего ряда, не удалены из держателя 14, когда измеренный интервал времени, в течение которого траектория света заблокирована, меньше заданного интервала времени.
Сигналы, генерируемые детектором 122 света, могут передаваться в контроллер устройства 100 для удаления яиц. Контроллер может дать команду устройству 100 для удаления яиц на повторную попытку удаления яйца. В другом варианте контроллер может подать оператору сигнал о том, что яйцо было удалено неудачно и т.д. Согласно некоторым вариантам выполнения настоящего изобретения, когда обнаружено, что яйцо не удалено из держателя успешно, детектор 122 света может передать сигнал сигнализации, которая активируется для извещения оператора о неудачном удалении. Примеры сигнализации включают звуковую сигнализацию, визуальную сигнализацию, сигнализацию в пользовательском интерфейсе, связанном с устройством 100 для удаления яиц, и т.д. Например, согласно некоторым вариантам выполнения настоящего изобретения устройство 100 для удаления яиц может включать пользовательский интерфейс, который отображает мнемосхему держателя для яиц со всеми ячейками для яиц. Пользовательский интерфейс, благодаря связи с различными детекторами 122 света, может отображать, в каких конкретно рядах и/или ячейках держателя 14 находится яйцо, которое было неудачно удалено.
Варианты выполнения настоящего изобретения не ограничиваются показанным расположением пары источника 120 света и детектора 122 света. Согласно другим вариантам выполнения изобретения может также использоваться другой набор пар источника света и детектора света, расположенных вдоль рядов, которые ориентированы перпендикулярно рядам, показанным на фиг.7, которые имеют пары источника света и детектора света, расположенные смежно. Кроме того, варианты выполнения изобретения не ограничиваются показанными устройствами 116 для сбора яиц. Варианты выполнения настоящего изобретения могут быть реализованы с устройством любого типа, выполненным с возможностью удаления яиц из держателя. В некоторых вариантах выполнения изобретения над держателем для яиц (например, по существу перпендикулярно ему и т.д.) может быть расположена камера для подтверждения того, что предназначенные для удаления яйца действительно удалены.
На фиг.5 и 6 поясняются способы и устройство для определения того, действительно ли из держателя для яиц удалены яйца, предназначенные для удаления, согласно другим вариантам выполнения настоящего изобретения. Вместо пары источника света и детектора света для каждого ряда держателя в показанном устройстве 200 для удаления яиц используется оптическая камера 130, расположенная смежно с каждым рядом (см. фиг.8). Как показано, каждая камера 130 расположена с одной стороны держателя 14, но не требует отдельного детектора. Каждая камера 130 выполнена с возможностью захвата траектории 134 оптической видимости, проходящей поверх держателя и через него. Каждая камера 130 выполнена с возможностью измерения интервала времени, в течение которого траектория 134 оптической видимости заблокирована, когда устройство 116 для сбора яиц перемещается из первого положения во второе положение и обратно в первое положение.
Согласно некоторым вариантам выполнения настоящего изобретения каждая камера 130 выполнена с возможностью генерирования сигнала, указывающего на то, действительно ли удалены яйца, предназначенные для удаления из ряда, на основании продолжительности интервала времени, в течение которого заблокирована траектория 134 оптической видимости. Например, каждая камера 130 может генерировать сигнал, который указывает на то, что яйца в соответствующем ряду, предназначенные для удаления, были удалены из держателя 14, когда измеренный интервал времени, в течение которого заблокирована траектория 134 оптической видимости, больше заданного интервала времени. (На фиг.6 показано успешное удаление яйца.) Также каждая камера 130 может генерировать сигнал, который указывает на то, что одно или несколько яиц, предназначенных для удаления из соответствующего ряда, не удалены из держателя 14, когда измеренный интервал времени, в течение которого заблокирована траектория оптической видимости, меньше заданного интервала времени. Сигналы, генерируемые каждой камерой 130, могут передаваться в контроллер устройства 100 для удаления яиц, пользовательский интерфейс и/или в устройства сигнализации, как описано выше.
Варианты выполнения настоящего изобретения не ограничиваются рассматриваемым расположением камер 130. Согласно другим вариантам выполнения изобретения также может использоваться другой набор камер, расположенных вдоль рядов держателя и перпендикулярно рядам держателя, как показано на фиг.8, причем камеры 130 расположены смежно с рядами держателя. В некоторых вариантах выполнения камера может быть расположена над держателем для яиц для подтверждения фактического удаления яиц, предназначенных для удаления.
Согласно другим вариантам выполнения изобретения камера 130, показанная на фиг.5 и 6, может быть заменена детекторами других типов (например, отражательными детекторами и т.д.), выполненными с возможностью контроля траектории над держателем для яиц и через него и измерения интервала времени, в течение которого траектория заблокирована, когда устройство для сбора яиц перемещается из первого положения во второе положение и обратно в первое положение. Эти детекторы также могут быть выполнены с возможностью генерирования сигнала, указывающего на то, действительно ли яйцо удалено из держателя, на основании длительности интервала времени, в течение которого траектория заблокирована.
На фиг.9 показана структурная схема установки 300 для обработки яиц согласно некоторым вариантам выполнения настоящего изобретения. Показанная установка 300 включает конвейер 310, который перемещает контейнеры (или другие держатели) 14 для яиц 12, и станцию 320 овоскопирования яиц, функционально связанную с конвейером 310 и с контроллером 360, который идентифицирует живые/неживые яйца и определяет яйца, подлежащие удалению из держателя 14. Показанная установка 300 также включает станцию 330 удаления яиц, выполненную с возможностью выборочного удаления яиц (например, живых или неживых яиц и т.д.) из держателя 14 для яиц, и станцию 340 обработки яиц. Станция 330 удаления яиц может включать устройство 100, 200 для удаления яиц, описанное выше и предназначенное для определения того, действительно ли удалены яйца, предназначенные для удаления.
При работе контейнер 14 с яйцами 12 перемещается от инкубатора к станции 320 овоскопирования с помощью конвейера 310. В вариантах выполнения настоящего изобретения могут быть использованы различные типы конвейерных систем. Системы для транспортировки яиц хорошо известны специалистам в данной области техники, и необходимости описывать их в данном документе нет. Станция 320 овоскопирования идентифицирует живые и неживые яйца и определяет яйца, подлежащие удалению из держателя 14.
Яйца, предназначенные для удаления, удаляются из контейнера 14 с помощью станции 330 удаления яиц. Проверка того, действительно ли удалены яйца, предназначенные для удаления, выполняется как описано выше. Если одно или несколько яиц удалены неудачно, об этом может быть извещен оператор и/или может быть предпринята другая попытка удаления.
Контейнер 14 на данном этапе на конвейере 310 перемещается к станции 340 обработки (например, для выполнения прививок, изготовления вакцины, отбора проб и т.д.). Примером станции 340 обработки является автоматизированная инъекционная система «INOVOJECT®» (производства компании «Embrex, Inc.», Research Triangle Park, North Carolina). Однако в соответствии с некоторыми вариантами выполнения изобретения могут использоваться и другие установки обработки, выполненные с возможностью выполнения инъекций и/или отбора проб.
Контроллер 360 управляет работой станции овоскопирования 320, конвейера 310, станции удаления яиц 330 и станции технологической обработки яиц 340. Для выполнения взаимодействия оператора и контроллера 360 может быть установлен операторский пульт (например, в виде дисплея) 370. Операторский пульт 370 может отображать или указывать другим способом яйца, которые были неудачно удалены из держателя 14.
Преимущество вариантов выполнения настоящего изобретения заключается в том, что устройства для сбора яиц, которые не работают правильно/точно (то есть которым не удается удалить яйца, предназначенные для удаления), могут быть быстро идентифицированы и отремонтированы. Вакуумные линии и/или трубки Вентури устройств для сбора яиц могут засоряться липким содержимым яйца, грязью с яичной скорлупы и другими частицами, и в этом случае устройство для сбора яиц не может удалить большинство яиц или все яйца, которые оно попытается удалить.
При отборе проб вируса гриппа в верхней части яйца пробивается отверстие, в результате этого на устройство для сбора яиц может воздействовать больше липкого содержимого яиц и частиц, чем при удалении непробитых яиц. Как и при получении вакцины гриппа, производители стремятся сократить количество рабочих, подвергаемых контакту с вакциной, в частности, при работе с вирусами H5N1 (птичий грипп). Таким образом, важно иметь возможность автоматического обнаружения засоренного устройства для сбора яиц и извещения оператора с тем, чтобы устройство для сбора яиц могло быть очищено/отремонтировано и могло вновь удалять яйца.
Варианты выполнения настоящего изобретения могут быстро и точно определить работающие со сбоями устройства для сбора яиц, отслеживая число удаленных яиц после каждой попытки устройства для сбора яиц и число неудачных удалений яиц и сигнализируя, когда количество неудачных попыток удаления яиц превышает некоторое количество в единицу времени (например, более двух неудачных удалений яиц в час), либо когда неудачные удаления яиц превышают некоторый процент от общего числа удалений яиц (например, если неудачные удаления составляют более 10% всех удалений и т.д.), или когда используется комбинация этих способов. В случаях, когда из ряда должно быть удалено более чем одно яйцо и ни одно из них фактически не удаляется, эти установки могут подсчитывать неудачные попытки для нескольких устройств для сбора яиц.
Все изложенное выше служит лишь иллюстрацией настоящего изобретения и не должно рассматриваться как его ограничение. Хотя были описаны несколько примеров выполнения настоящего изобретения, специалисты в данной области техники без труда поймут, что при осуществлении изобретения возможно множество изменений без отклонения от идеи и преимуществ настоящего изобретения. Соответственно все такие изменения входят в объем настоящего изобретения, определенный в формуле изобретения. Изобретение определено в соответствии с последующими пунктами формулы изобретения, причем их эквиваленты включены в формулу.
На фиг.10-12 показан вариант выполнения устройства 400 для детектирования работающего со сбоями устройства 450 для сбора яиц согласно данному изобретению, причем подобные элементы имеют одинаковые ссылочные номера позиций, как и на фиг.1-9. Устройство 400 включает устройство 404 транспортировки яиц, имеющее устройство 450 для сбора яиц, расположенное над подвижным конвейером 310 с помощью кронштейнов 454. Конвейер 310 включает замкнутую конвейерную ленту 412, уложенную на ряд роликов 416. Яйца 12 транспортируются в контейнерах или держателях 14 для яиц, как показано на фиг.11, находящихся на конвейерной ленте 412, к определенному месту под вакуумными присосками 116 устройства 450 для сбора яиц. Держатель 14 для яиц удерживается в заданном месте стопорным штифтом 420, который перемещается между рабочим и нерабочим положениями, как показано на фиг.11. Затем устройство 450 для сбора яиц выборочно удаляет одно или несколько яиц 12 из контейнера для яиц, как показано на фиг.3А-3С и подробно описано выше. Устройство 500 для детектирования расположено над подвижной конвейерной лентой 412 и присоединено к устройству 400 для транспортировки яиц с использованием несущей конструкции 504. Устройство 500 для детектирования расположено рядом с устройством 450 для сбора яиц и после него относительно направления 414 подвижной конвейерной ленты 412. Устройство 500 для детектирования имеет оптическую систему, выполненную в виде фотодетекторов 502. В предпочтительном варианте выполнения фотодетекторы 502 выполнены водонепроницаемыми. Устройство 500 для детектирования также включает источник света для излучения рассеянного света на яйца 12 в держателе 14 для яиц. Альтернативный вариант выполнения может включать несколько устройств 450 для сбора яиц, расположенных вдоль конвейера 310, и одно или несколько устройств для детектирования, предназначенных для контроля точности работы нескольких устройств для сбора яиц 450.
При работе, как показано на фиг.10-12, держатель или контейнер 14, находящийся на конвейерной ленте 412, контролируется устройством 500 для детектирования для определения устройства для сбора яиц, работающего со сбоями. Как описано выше, в соответствии с фиг.3А-3С устройство 450 для сбора яиц передвигается между первым положением и вторым положением, находясь в контакте с яйцом в держателе для яиц. Устройство для сбора яиц захватывает определенное яйцо при нахождении во втором положении и удаляет это яйцо из держателя при перемещении из второго положения в первое положение.
Устройство 500 для детектирования определяет количество яиц 12 в держателе 14 для яиц, когда держатель 14 проходит под устройством 500 для детектирования в определенном положении, смежном с устройством 450 для сбора яиц. Устройство 500 для детектирования определяет количество яиц 12 в одном ряду в держателе 14 для яиц, когда держатель на конвейерной ленте 412 проходит с заданной скоростью мимо устройства 500 для детектирования.
Устройство управления, выполненное в виде контроллера 360, является частью системы 600 контроля устройства для сбора яиц (фиг.12) и электрически осуществляет связь с устройством 450 для сбора яиц и управляет им. Контроллер 360 может представлять собой программируемый логический контроллер (ПЛК), который содержит программу 362, встроенную в запоминающее устройство 364, и осуществляет связь с процессором 366. Источник света в устройстве 500 для детектирования излучает рассеянный свет в направлении вершин яиц 12, а отраженный свет от вершин яиц 12 приводит к регистрации устройством для детектирования наличия сигнала, означающего, что яйцо присутствует. Фотодетекторы 502 электрически осуществляют связь с процессором 516 в устройстве 500 для детектирования. Устройство 500 для детектирования также содержит программу 508, встроенную в запоминающее устройство 512, осуществляющее связь с процессором 516 для возбуждения источника света, а также последовательность детектирования устройствами 500 для детектирования согласно командам программы 508.
Фотодетекторы 502 устройства 500 для детектирования расположены в ряд шириной, равной ширине ряда в держателе 14 для яиц, который представляет собой ряд из шести яиц в типовом контейнере 14, содержащем сетку ячеек шесть на шесть. Контейнеры с яйцами 14 проходят под детекторами 502 устройства 500 для детектирования с заданной скоростью, например со скоростью приблизительно десять дюймов в секунду (0,25 м/с). В одном варианте выполнения изобретения контейнеры с яйцами 14 проходят под детекторами 502 устройства 500 для детектирования со скоростью приблизительно от пяти до девяти дюймов в секунду. В другом варианте выполнения изобретения контейнеры с яйцами 14 проходят под детекторами 502 устройства 500 для детектирования со скорость приблизительно от одиннадцати до пятнадцати дюймов в секунду. Контейнеры, которые содержат много яиц (например, контейнеры с 132 яйцами, имеющие двадцать два ряда яиц по шесть яиц в каждом ряду), могут останавливаться по мере сбора по одному сегменту за раз устройством для сбора с 48 элементами только одного сегмента. Контроллер 360 принимает данные от устройства 500 для детектирования для вычисления количества яиц 12 в держателе 14 для яиц. В частности, фотодетекторы 502 детектируют отраженный от яйца 12 свет и посылают данные в контроллер 360 с использованием программы 508. Когда фотодетекторы 502 принимают отраженный от яйца 12 свет, контроллер 360 с использованием координат X-Y определяет, что в соответствующем месте в контейнере 14 яйцо есть. Когда фотодетекторы 502 не принимают отраженный от яйца 12 свет, контроллер 360 определяет, что в соответствующем месте в контейнере 14 яйца нет. Таким образом, контроллер 360 вычисляет положение в держателе 14 для яиц для каждого яйца 12 и каждой пустой ячейки в держателе 14 для яиц. Контроллер 360 определяет, когда количество яиц 12 в держателе 14 для яиц отличается от заданного для держателя 14 для яиц количества, с использованием программы 362. В одном варианте выполнения изобретения контроллер вычисляет отсутствие яйца 12 в контейнере 14 с использованием временной схемы для яиц, проходящих под устройством для детектирования. Таким образом, когда сигнал, указывающий на детектированное яйцо, не принимается в течение вычисленного интервала времени, основанного на величине скорости конвейерной ленты, то контроллер 360 определяет, что яйцо в этом ряду в контейнере 14 отсутствует. Отсутствующие яйца могут подсчитываться фотодетекторами устройства для детектирования, определяющего переход от детектирования или наблюдения яйца и контейнера к наблюдению ячейки в контейнере, в которой яйцо отсутствует. Например, система с датчиками может быть отрегулирована так, чтобы какой-то элемент системы был всегда видим до тех пор, пока не возникнет большой пустой промежуток из-за отсутствующего яйца, поскольку в контейнерах имеется достаточно много материала между яйцами, так что промежуток между соседними яйцами не детектируется датчиком при его должной настройке. Контроллер 360 генерирует сигнал, выполненный в виде сигнализации 604, указывающий на то, что количество яиц в держателе 14 для яиц отличается на заданную величину от расчетного количества яиц. Сигнал может быть выполнен в виде нескольких визуальных и/или звуковых предупредительных сигналов. Предупредительная сигнализация может извещать оператора с целью повторного запуска конвейерной системы после выполнения автоматического останова, когда устройство для сбора яиц пропустило заданное количество яиц.
После того как устройство 500 для детектирования определило количество яиц 12 в держателе 14 для яиц, контроллер 360 сопоставляет держатель 14 для яиц по меньшей мере с одним устройством 450 для сбора яиц, когда количество яиц 12 в держателе 14 для яиц отличается на заданную величину от расчетного количества яиц. Кроме того, контроллер 360 идентифицирует сопоставленное устройством для сбора яиц с использованием сигнализации 604 путем, например, подачи звуковой сигнализации и/или мигающего светового сигнала или путем идентификации устройства для сбора яиц с помощью идентификационного номера. В одном варианте выполнения изобретения контроллер 360 активирует сигнализацию 604, когда устройство 450 для сбора яиц пропустило заданное количество попыток удалений, например, по меньшей мере двух яиц, или в другом варианте, когда отсутствует последовательно по меньшей мере два яйца или отсутствует по меньшей мере два яйца в одном контейнере, или в другом варианте пропущены три удаления из десяти выполненных попыток.
В альтернативном варианте выполнения настоящего изобретения устройство 500 для детектирования включает камеру (не показана) и систему видеообработки (не показана). Контейнер для яиц имеет определенный цвет подложки, например черный. Система видеообработки определяет количество отсутствующих яиц 12 в контейнере 14, анализируя видимость черного фона с помощью камеры, указывающей на то, что место в контейнере 14 пустое или на месте находится белый предмет, означающий, что в заданном месте в контейнере 14 находится яйцо 12. Система видеообработки передает информацию в контроллер 360. В контроллере, подобно варианту выполнения, в котором в устройстве 500 для детектирования используются фотодетекторы, контроллер сопоставляет держатель 14 для яиц по меньшей мере с одним устройством 450 для сбора яиц, когда количество яиц 12 в держателе 14 для яиц отличается на заданную величину от расчетного количества яиц.
В примере выполнения изобретения контейнер 14, находящийся на конвейере 310, имеет сетку для яиц размером шесть на шесть ячеек. Устройство 500 для детектирования включает ряд из шести фотодетекторов для считывания одного ряда за раз, когда контейнер 14 проходит под устройством детектора с предпочтительной скоростью, равной десяти дюймам в секунду. Контроллер 360 хранит заданное расчетное количество яиц для контейнера 14 для яиц с помощью программы 362 и запоминающего устройства 364. Таким образом, контроллер 360 хранит количество яиц 12, которые должны находиться в контейнере 14, и их местоположения и, наоборот, хранит количество и местоположения в контейнере 14, в которых должны отсутствовать яйца, поскольку эти яйца предназначены для удаления устройством 450 для сбора яиц. По мере прохождения контейнера 14 под этими шестью фотодетекторами 502 устройства 500 для детектирования, фотодетекторы 502 принимают отраженный свет от всех яиц 12 в ряду. Программа 508 в устройстве 500 для детектирования на основании принятого фотодетекторами 502 отраженного света определяет, сколько яиц находится в каждом ряду проходящего контейнера 14, и определяет положение отсутствующих в контейнере 14 яиц 12. Контроллер 360 сравнивает заданное расчетное количество яиц для контейнера с количеством и положениями яиц в контейнере, определенными устройством 500 для детектирования. Контроллер идентифицирует яйцо в той ячейке, которая должна быть пустой, и сопоставляет неудачное удаление с конкретным устройством 450 для сбора яиц. В другом варианте конструкции контроллер только записывает количество отсутствующих яиц и сравнивает это количество с количеством предпринятых попыток удалений яиц. Контроллер 360 может быть запрограммирован с возможностью активации сигнализации 604, когда определенное количество яиц не удалено конкретным устройством для сбора яиц, например два или больше неудачных удалений в одном контейнере. Например, в качестве иллюстрации, контроллер имеет данные, указывающие на то, что устройство 450 для сбора яиц удалило в контейнере одно яйцо 12 в каждом из шести рядов яиц контейнера 14. Таким образом, контейнер, состоящий из тридцати шести ячеек для яиц, должен содержать тридцать яиц, и яйца должны отсутствовать в конкретных ячейках в каждом ряду контейнера 14. Устройство 500 для детектирования анализирует яйца с помощью фотодетекторов 502 и определяет, что контейнер 14 содержит тридцать три яйца и сохраняет данные каждой ячейки в контейнере, в которой отсутствует яйцо. Контроллер 360 определяет места трех пропущенных яиц и инициирует сигнализацию 604, как только устройство для сбора яиц пропустило более двух яиц в контейнере 14.
Устройство 450 для удаления яиц, показанное на фиг.10-11, представляет собой обладающее высокой надежностью устройство для удаления неживых яиц из лотков или контейнеров 14. Однако, если в вакуумных линиях отдельных устройств для сбора яиц накапливаются посторонние частицы или если разрывается вакуумная присоска, устройство для сбора яиц может быть не в состоянии захватывать яйца из лотков. Достигнутая цель системы 600 контроля устройства для сбора яиц заключается в детектировании работающего со сбоями устройства для сбора яиц таким образом, чтобы оно могло быть очищено до того, как это устройство для сбора яиц пропустит и оставит в лотках или контейнерах 14 значительное количество неживых яиц. Таким образом, система 600 контроля устройства для сбора яиц достигает данной цели путем подсчета количества яиц, отсутствующих в каждом столбце в лотке 14, и статистической привязки этой информации к отдельным устройствам для сбора яиц, например таким, как устройство 450 для сбора яиц, показанное на фиг.10 и 11, которое может быть одним из нескольких устройств для сбора яиц. При работе устройство для сбора яиц, которому не удается удалить несколько яиц, идентифицируется как работающее со сбоями, а система 300 удаления яиц (фиг.9) и конвейер 310 (фиг.10) останавливаются для прочистки указанного устройства для сбора яиц.
В одном примере при обработке в системе 600 партии яиц, содержащей 85% живых яиц, одно работающее со сбоями устройство для сбора яиц, состоящее, например, из 48 установок для сбора, может увеличить процент неживых яиц, содержащихся в контейнерах на выходе, на 0,3% (процентных пункта). Система контроля удаления яиц 600 идентифицирует работающее со сбоями устройство для сбора яиц так, что оно может быть прочищено до того, как оно не сможет удалить более двух или трех яиц. Благодаря прочистке устройства для сбора яиц до того, как оно не сможет удалить более двух или трех яиц, увеличение количества неживых яиц в лотках на выходе составит менее 0,06% (процентных пунктов) для одной тележки яиц.
В частности, вариант выполнения системы 600 контроля удаления яиц согласно изобретению включает следующие этапы. После выполнения овоскопирования яиц лоток с яйцами или контейнер 14 подается к зоне удаления под устройством 450 для сбора яиц, где яйца, идентифицированные как мертвые, удаляются из лотка. Например, узел из 48 устройств для сбора яиц обрабатывает каждый лоток с яйцами в трех сегментах. После станции удаления находится зона контроля, где ряд из двенадцати отражательных фотодетекторов 502, установленных в устройстве 500 для детектирования над лотком 14, сканирует или просматривает верхние части каждого яйца 12 и лоток 14. Каждый фотодетектор контролирует одиннадцать ячеек для яиц в каждом столбце лотка для 132 яиц. Отсутствие яйца детектируется, когда датчик не видит ничего в течение определенного интервала времени и/или при изменении состояния видимости на состояние невидимости. Эта операция выполняется последовательно по мере перемещения лотка от одного стопорного штифта 420 к другому стопорному штифту 420 для выравнивания сегментов лотка относительно устройства для сбора яиц. Контроллер 360 (фиг.12) или ПЛК подсчитывает количество отсутствующих яиц, детектированных датчиками 502 в каждом столбце лотка, и сравнивает общее количество для каждого столбца с ожидаемым количеством удаленных яиц в каждом столбце. Если количество отсутствующих яиц, детектированных в столбце, меньше ожидаемого количества удаленных яиц, эта информация передается в пользовательский интерфейс 370 (который может представлять собой человеко-машинный интерфейс (HMI)) как неудачное удаление для данного столбца. Эта информация может передаваться как логическое значение неудачного удаления или как количество неудачных удалений (которое представляет собой разность между видимыми пустыми ячейками в лотке и предпринятыми попытками удалениями) для каждого столбца. Интерфейс 370 наносит красный фон на столбец с неудачным удалением. Интерфейс 370 в данном варианте выполнения может представлять собой панельный персональный компьютер (ПК), который обычно проще программировать для численных операций, чем контроллер 360 или ПЛК. Таким образом, интерфейс 370 включает алгоритм или программу 372, хранимую в носителе данных компьютера для чтения, например в запоминающем устройстве 374, и связывается с процессором 376 исполнения команд программы. Интерфейс 370 назначает очки за неудачные удаления с использованием алгоритма 372, как описано ниже, для всех устройств для сбора яиц, активных для конкретного столбца. Если интерфейс 370 подсчитывает несколько неудачных удалений для конкретного устройства для сбора яиц, в контролер 360 передается сообщение об ошибке устройства для сбора яиц. Затем контроллер 360 останавливает работу и выдает код остановки для выполнения персоналом прочистки устройства для сбора яиц. Для повторного запуска системы 600 после прочистки устройства для сбора яиц оператор нажимает сначала кнопку сброса останова, а затем кнопку запуска.
В одном примере реализации функции контроля работы устройства для сбора яиц кнопка на дисплее контроля качества/диагностики (который может быть включен в интерфейс 370) может называться «сумма удалений» и при нажатии показывать массив накопления системой 600 контроля удаления яиц статистических данных. Эти массивы показывают текущую сумму для каждой позиции удаления. Когда детектирована работа устройства для сбора яиц со сбоями, массив сумм для подозреваемого в неисправности устройства для сбора яиц сбрасывается на уровень немного ниже уровня срабатывания сигнализации, например, после нажатия на экране запуска кнопки сброса ошибки. Благодаря сбросу на уровень чуть ниже уровня срабатывания сигнализации при следующей попытке удаления яйца этим устройством для сбора яиц будет детектирована продолжительная работа устройства для сбора яиц со сбоями.
В представленном варианте выполнения изобретения требуется более одного неудачного удаления для каждого устройства для сбора яиц, прежде чем будет принято решение об останове, чтобы предотвратить останов при возникновении случайных событий, например раскалывании или заклинивании яйца. Например, для партии с 90% содержанием живых яиц при использовании узла с 48 устройствами для сбора яиц узел устройства для сбора яиц обработает в среднем приблизительно 480 неживых яиц на тележку (приблизительно тридцать шесть (36) контейнеров по 132 яйца), и каждое устройство для сбора яиц обработает приблизительно десять неживых яиц на каждую тележку из 4800 яиц.
Кроме того, когда количество неудачных удалений для каждого столбца передается из контроллера 360 в интерфейс 370, алгоритм контроля удаления распределяет неудачные удаления на все активные устройства для сбора яиц в столбце с неудачным удалением. В частности, если в столбце активно одно устройство для сбора яиц и детектировано одно неудачное удаление, то к сумме неудачных удалений для этого устройства для сбора яиц прибавляется 1,0. Если в столбце имеются два активных устройства для сбора яиц и детектировано одно неудачное удаление, то к суммам неудачных удалений для каждого устройства для сбора яиц прибавляется 0,5. Если в столбце есть два неудачных удаления и были предприняты три попытки удаления, то на каждое предпринятое удаление назначается 2/3 очка. Для контейнеров из 132 яиц требуется, чтобы в контейнере обрабатывались три сегмента, таким образом, возможно, что одно закупоренное устройство для сбора яиц осуществит три неудачных удаления (предполагая, что неживые яйца находятся в одном и том же положении удаления во всех трех сегментах, а устройство для сбора яиц в этом положении работает со сбоями). В случае когда один столбец имеет две попытки удаления одним и тем же устройством для сбора яиц и одну попытку удаления вторым устройством для сбора яиц и зарегистрированы два неудачных удаления, будут назначены в общей сложности два очка неудачного удаления, то есть 4/3 очка для положения устройства для сбора яиц, ответственного за два удаления, и 2/3 очка для другого активного устройства для сбора яиц. Другими словами, общие очки удаления, доступные для назначения в каждом столбце, представляют собой разность между количеством предпринятых попыток удалений и измеренным количеством отсутствующих яиц в данном столбце. Каждый раз, когда в столбце нет неудачных удалений, из суммы для каждого активного устройства для сбора яиц вычитается 0,1. Например, из суммы для устройства для сбора яиц, которое сработало дважды на трех сегментах без неудачных удалений для данного столбца, будет вычтено 0,2. Суммы сбрасываются на ноль, если вычитание создает отрицательную сумму. Любое устройство для сбора яиц с суммой более 2,0 считается работающим со сбоями. После останова любого устройства для сбора яиц для всех устройств для сбора яиц, имеющих суммы выше 2,0, эти суммы устанавливаются равными 1,9, чтобы после нажатия кнопки сброса останова работа могла продолжаться.
В другом варианте выполнения изобретения для каждого столбца из контроллера 360 в интерфейс 370 передается логический сигнал. Алгоритм проверки удаления распределяет неудачные удаления ко всем активным устройствам для сбора яиц в столбце с неудачным удалением. В частности, если в столбце предпринята одна попытка удаления и обнаружено неудачное удаление, то к сумме для активного устройства для сбора яиц прибавляется 1,0. Если есть две предпринятых попытки удаления для столбца и обнаружено неудачное удаление, то к сумме для каждого активного устройства для сбора яиц прибавляется 0,5. Если для столбца имеется три предпринятых попытки удаления и есть неудачное удаление, то каждому активному устройству для сбора яиц назначается 1/3 очка. Как показано в примере выше, для контейнеров с 132 яйцами требуется, чтобы в контейнере обрабатывались три сегмента, таким образом, возможно, что одно закупоренное устройство для сбора яиц осуществит три неудачных удаления (предполагая, что неживые яйца находятся в одном и то же положении удаления во всех трех сегментах, а устройство для сбора яиц в этом положении работает со сбоями). В случае если у одного столбца есть две попытки удаления одним и тем же устройством для сбора яиц и одна попытка удаления вторым устройством для сбора яиц и детектировано одно неудачное удаление, к положению устройства для сбора яиц прибавляется 2/3 очка, ответственного за два удаления, а к другому активному устройству для сбора яиц прибавляется 1/3 очка. Каждый раз, когда в столбце нет неудачных удалений, из суммы для каждого активного устройства для сбора яиц вычитается 0,1. Например, из суммы для устройства для сбора яиц, которое сработало дважды на трех сегментах и для которого не была детектирована работа со сбоями для данного столбца, будет вычтено 0,2. Суммы сбрасываются на ноль, когда при вычитании получается отрицательная сумма. Любое устройство для сбора яиц с суммой более 2,0 считается работающим со сбоями. После останова любого устройства для сбора яиц, для всех устройств для сбора яиц имеющих суммы выше 2,0, эти суммы устанавливаются равными 1,9, чтобы после нажатия кнопки сброса останова работа могла продолжаться.
Понятно, что отсутствующее яйцо при подаче лотка в станцию овоскопирования создает потенциальную опасность скрытия факта неудачного удаления, так как контроллеру 360 не сообщается об отсутствии яиц в подаваемом контейнере 14. Однако способ детектирования удалений с накоплением легко определяет работающее со сбоями устройство для сбора яиц 450, если в подаваемых контейнерах 14 есть случайно отсутствующие яйца 12 или их нет.
Несмотря на то что данное изобретение подробно раскрыто и описано применительно к его предпочтительным вариантам выполнения, специалистам в данной области понято, что могут быть сделаны изменения в формах и признаках без отклонения от идеи и объема настоящей заявки. Поэтому настоящее изобретение не ограничивается точными формами и признаками, описанными и показанными в настоящем документе, а ограничивается объемом прилагаемой формулы изобретения.
Реферат
Группа изобретений относится к области птицеводства, в частности к устройствам для перемещения яиц и способам контроля перемещения яиц. Техническим результатом является увеличение коэффициента вывода и жизнеспособности цыплят. Предлагается способ и устройство для автоматического определения того, удалены или не удалены яйца, предназначенные для удаления из держателя для яиц, устройством для удаления яиц. По траектории над держателем для яиц и вдоль него испускается свет по мере перемещения устройства для сбора яиц для съема яйца. Интервал времени, в течение которого траектория света заблокирована, когда устройство для сбора яиц перемещается, измеряется и используется для определения того, удалено ли яйцо из держателя. Охарактеризовано устройство и способ для детектирования работающего со сбоями устройства для сбора яиц. Устройство для детектирования определяет количество яиц в держателе для яиц. Устройство управления контролирует устройство для сбора яиц и устройство для детектирования. Устройство управления вычисляет количество яиц в держателе для яиц для того, чтобы определить ситуацию, когда количество яиц отличается на заданную величину от расчетного количества яиц для держателя для яиц. 8 н. и 43 з.п. ф-лы, 17 ил.
Формула
устройство для сбора яиц, выполненное с возможностью перемещения между первым положением и вторым положением в контакте с яйцом, находящимся в держателе, причем устройство для сбора яиц выполнено с возможностью нахождения в контакте с яйцом при нахождении во втором положении и удаления яйца из держателя при перемещении из второго положения в первое положение,
источник света, расположенный с одной стороны держателя и испускающий свет по траектории над держателем и вдоль него, и
детектор света, расположенный с противоположной стороны держателя и выполненный с возможностью измерения интервала времени, в течение которого траектория светового луча заблокирована, когда устройство для сбора яиц перемещается из первого положения во второе положение и обратно в первое положение.
устройство для сбора яиц, выполненное с возможностью перемещения между первым положением и вторым положением в контакте с яйцом, находящимся в держателе, причем устройство для удаления яиц выполнено с возможностью нахождения в контакте с яйцом при нахождении во втором положении и удаления яйца из держателя при перемещении из второго положения в первое положение,
детектор, расположенный смежно с держателем и выполненный с возможностью контроля траектории над держателем и вдоль него и измерения интервала времени, в течение которого траектория заблокирована, когда устройство для сбора яиц перемещается из первого положения во второе положение и обратно в первое положение.
испускание светового луча по траектории над держателем для яиц и вдоль него,
перемещение устройства для сбора яиц из первого положения во второе положение в контакте с яйцом, находящимся в контейнере, и обратно в первое положение, причем устройство для сбора яиц выполнено с возможностью нахождения в контакте с яйцом при нахождении во втором положении и удаления яйца из контейнера при перемещении из второго положения в первое положение, и
измерение интервала времени, в течение которого траектория света заблокирована, когда устройство для сбора яиц перемещается из первого положения во второе положение и обратно в первое положение.
контроль траектории оптической видимости над держателем для яиц и вдоль него,
перемещение устройства для сбора яиц из первого положения во второе положение в контакте с яйцом, находящимся в держателе, и обратно в первое положение, причем устройство для сбора яиц выполнено с возможностью нахождения в контакте с яйцом при нахождении во втором положении и удаления яйца из контейнера при перемещении из второго положения в первое положение, и
измерение интервала времени, в течение которого траектория оптической видимости заблокирована, когда устройство для сбора яиц перемещается из первого положения во второе положение и обратно в первое положение.
подсчет количества раз, когда устройству для сбора яиц не удается удалить яйцо, предназначенное для удаления из держателя, и генерирование сигнала, который указывает на то, что указанное устройство для сбора яиц работает со сбоями, когда указанное количество раз превышает заданное количество.
устройство для сбора яиц, выполненное с возможностью перемещения между первым положением и вторым положением в контакте с яйцом, находящимся в держателе, причем устройство для сбора яиц выполнено с возможностью нахождения в контакте с указанным яйцом при нахождении во втором положении и удаления указанного яйца из держателя при перемещении из второго положения в первое положение,
устройство для детектирования, предназначенное для детектирования количества яиц в держателе для яиц, когда держатель для яиц находится в заданном месте, смежном с устройством для сбора яиц,
устройство управления, электрически осуществляющее связь с устройством для сбора яиц и устройством для детектирования и управляющее ими, причем устройство управления принимает данные от устройства для детектирования для вычисления количества яиц в держателе для яиц и определяет ситуацию, когда количество яиц в держателе для яиц отличается на заданное количество от заданного расчетного количества яиц для держателя для яиц.
перемещение устройства для сбора яиц между первым положением и вторым положением в контакте с яйцом, находящимся в держателе, причем устройство для сбора яиц выполнено с возможностью нахождения в контакте с яйцом при нахождении во втором положении и удаления яйца из контейнера при перемещении из второго положения в первое положение,
детектирование количества яиц в держателе для яиц с помощью устройства для детектирования,
сравнение количества яиц в держателе для яиц с заданным для держателя для яиц количеством яиц с помощью устройства управления, электрически осуществляющего связь с устройством для сбора яиц и устройством для детектирования, и
определение с помощью устройства управления ситуации, когда количество яиц в держателе для яиц отличается на заданную величину от расчетного количества яиц.
устройство для сбора яиц, выполненное с возможностью перемещения между первым положением и вторым положением в контакте с яйцом, находящимся в держателе, причем устройство для сбора яиц выполнено с возможностью нахождения в контакте с указанным яйцом при нахождении во втором положении и удаления указанного яйца из держателя при перемещении из второго положения в первое положение,
устройство для детектирования, предназначенное для детектирования количества яиц в держателе для яиц, когда держатель для яиц находится в заданном месте, смежном с устройством для сбора яиц,
устройство управления, электрически осуществляющее связь с устройством для сбора яиц и устройством для детектирования и управляющее ими, причем устройство управления принимает данные от устройства для детектирования для вычисления количества яиц в держателе для яиц и определяет ситуацию, когда количество яиц в держателе для яиц отличается на заданную величину от заданного расчетного количества яиц для держателя для яиц, причем устройство управления генерирует сигнал, указывающий на ситуацию, когда количество яиц в держателе для яиц отличается на заданную величину от расчетного количества яиц, и сопоставляет держатель для яиц, по меньшей мере, с одним устройством для сбора яиц, когда количество яиц в держателе для яиц отличается на заданную величину от расчетного количества яиц, причем указанный сигнал идентифицирует устройство для сбора яиц, и
подвижную конвейерную систему, транспортирующую держатели для яиц к указанному заданному месту, смежному с устройством для сбора яиц, после удаления указанных яиц устройством для сбора яиц.
Комментарии