Сельскохозяйственная машина, в частности машина для уборки растений, содержащая два приводимых в действие рабочих агрегата, шарнирно соединенных с одной боковой стойкой - RU2662180C1
Код документа: RU2662180C1
Чертежи
Описание
Изобретение относится к сельскохозяйственной машине, в частности к машине для уборки растений, содержащей:
- шасси, выполненное с возможностью соединения с самоходным транспортным средством, которое может передвигаться в направлении движения вперед,
- стойку, соединенную с шасси и выполненную между первым боковым концом стойки и вторым боковым концом стойки,
- первое шарнирное устройство, соединяющее стойку с шасси вблизи первого бокового конца, причем это первое шарнирное устройство позволяет стойке перемещаться относительно шасси
между рабочим положением, в котором стойка расположена сбоку относительно шасси,
и транспортировочным положением, в котором стойка повернута относительно шасси так, чтобы занимать перпендикулярно к направлению движения меньший габарит, чем в рабочем положении,
- первый рабочий агрегат, соединенный со стойкой и проходящий, в частности, в рабочем положении стойки и в направлении, перпендикулярном к направлению движения, от второго бокового конца в направлении первого бокового конца,
- второй рабочий агрегат, соединенный со стойкой и проходящий, в частности, в рабочем положении стойки и в направлении, перпендикулярном к направлению движения и ориентированном от первого бокового конца ко второму боковому концу, начиная от второго бокового конца стойки,
- второе шарнирное устройство, установленное на стойке вблизи второго бокового конца,
при этом второе шарнирное устройство соединяет второй рабочий агрегат со стойкой вблизи второго бокового конца,
при этом второе шарнирное устройство позволяет второму рабочему агрегату поворачиваться относительно стойки вокруг второй геометрической оси, находящейся вблизи второго бокового конца и ориентированной по существу в направлении движения, когда стойка находится в рабочем положении,
- трансмиссионный механизм, предназначенный для приведения в действие рабочих орудий первого и второго рабочих агрегатов и установленный, в частности, на стойке вблизи второго бокового конца.
Такая машина известна из документа ЕР 1175819 А2. На этой машине первый рабочий агрегат может быть шарнирно соединен со стойкой при помощи оси, ориентированной по существу в направлении движения. Эта ось находится по существу на половине расстояния от первого и второго боковых концов стойки. Первый рабочий агрегат расположен между первым и вторым боковыми концами. Этот первый рабочий агрегат содержит рабочие орудия, которые во время работы приводятся в действие трансмиссионным механизмом, установленным, в частности, на стойке вблизи ее второго бокового конца. Этот трансмиссионный механизм содержит коробку, установленную на стойке вблизи ее второго бокового конца, и трансмиссию, проходящую спереди коробки в направлении первого рабочего агрегата. Чтобы следовать движениям первого рабочего агрегата вокруг его оси шарнирного соединения со стойкой, эта трансмиссия должна содержать шарнирные и/или кулисные соединения. Однако такая трансмиссия делает машину сложной и дорогой. Такая трансмиссия требует также регулярного обслуживания и является источником неисправностей. Кроме того, такая трансмиссия ограничивает амплитуду поворота первого рабочего агрегата вокруг его оси шарнирного соединения со стойкой. Действительно, ее шарнирные и/или кулисные соединения имеют ограниченный диапазон углового изменения и/или длины. На этой известной машине каждый рабочий агрегат может поворачиваться в плоскости, по существу перпендикулярной к направлению движения. Однако в рабочем положении стойки каждый рабочий агрегат имеет постоянную ориентацию по существу в горизонтальной плоскости. Это не позволяет убирать рабочий агрегат перед препятствием, которое он может встретить во время работы. В этом случае рабочий агрегат может подвергнуться серьезному повреждению.
Задача изобретения состоит в создании сельскохозяйственной машины, в частности сельскохозяйственной машины для уборки растений, в которой устранены вышеупомянутые недостатки.
В этой связи, отличительная особенность заявленного изобретения состоит в том, что:
- второе шарнирное устройство соединяет первый рабочий агрегат со стойкой вблизи второго бокового конца,
- во время работы второе шарнирное устройство позволяет первому рабочему агрегату поворачиваться относительно стойки вокруг первой геометрической оси, находящейся вблизи второго бокового конца и ориентированной, когда стойка находится в рабочем положении, по существу в направлении движения.
Таким образом, первый рабочий агрегат соединен со стойкой вблизи трансмиссионного механизма. Первая геометрическая ось, вокруг которой первый рабочий агрегат может поворачиваться относительно стойки, находится вблизи трансмиссионного механизма. Эта конструкция с применением простого и недорого трансмиссионного механизма обеспечивает большую амплитуду поворота первого рабочего агрегата вокруг первой геометрической оси. Во время работы этот первый рабочий агрегат может точно следовать профилю поля, по которому движется машина. Близость трансмиссионного механизма и первой геометрической оси позволяет уменьшить число степеней свободы при передаче движения в направлении рабочих орудий первого рабочего агрегата. В частности, можно исключить кулисное соединение на уровне передачи движения от стойки к рабочим орудиям первого рабочего агрегата.
Изобретение отличается также тем, что
второе шарнирное устройство содержит поворотную ось, ориентированную вверх в рабочем положении стойки,
трансмиссионный механизм установлен на стойке с возможностью поворота вокруг поворотной оси,
трансмиссионный механизм и по меньшей мере один среди первого и второго рабочих агрегатов могут совместно поворачиваться вокруг указанной поворотной оси в положении стойки, в котором стойка расположена сбоку относительно шасси.
Возможность поворота указанного по меньшей мере одного из первого и второго рабочих агрегатов вокруг поворотной оси позволяет этому рабочему агрегату отходить назад в случае встречи с препятствием. Это позволяет предохранять от серьезных повреждений указанный по меньшей мере один из первого и второго рабочих агрегатов. Кроме того, установка трансмиссионного механизма на стойке с возможностью поворота вокруг поворотной оси и его поворот с указанным по меньшей мере одним из первого и второго рабочих агрегатов вокруг поворотной оси намного упрощают трансмиссионный механизм. Действительно, этот механизм может не содержать множества шарниров и/или кулисных соединений на уровне передачи движения в направлении рабочих орудий указанного рабочего агрегата для обеспечения его поворота вокруг поворотной оси.
Обеспечиваемая изобретением простота трансмиссионного механизма позволяет повысить надежность машины и также сократить операции обслуживания.
Другие отличительные признаки и преимущества изобретения будут более очевидны со ссылками на прилагаемые чертежи, которые иллюстрируют неограничивающий пример осуществления заявленной машины.
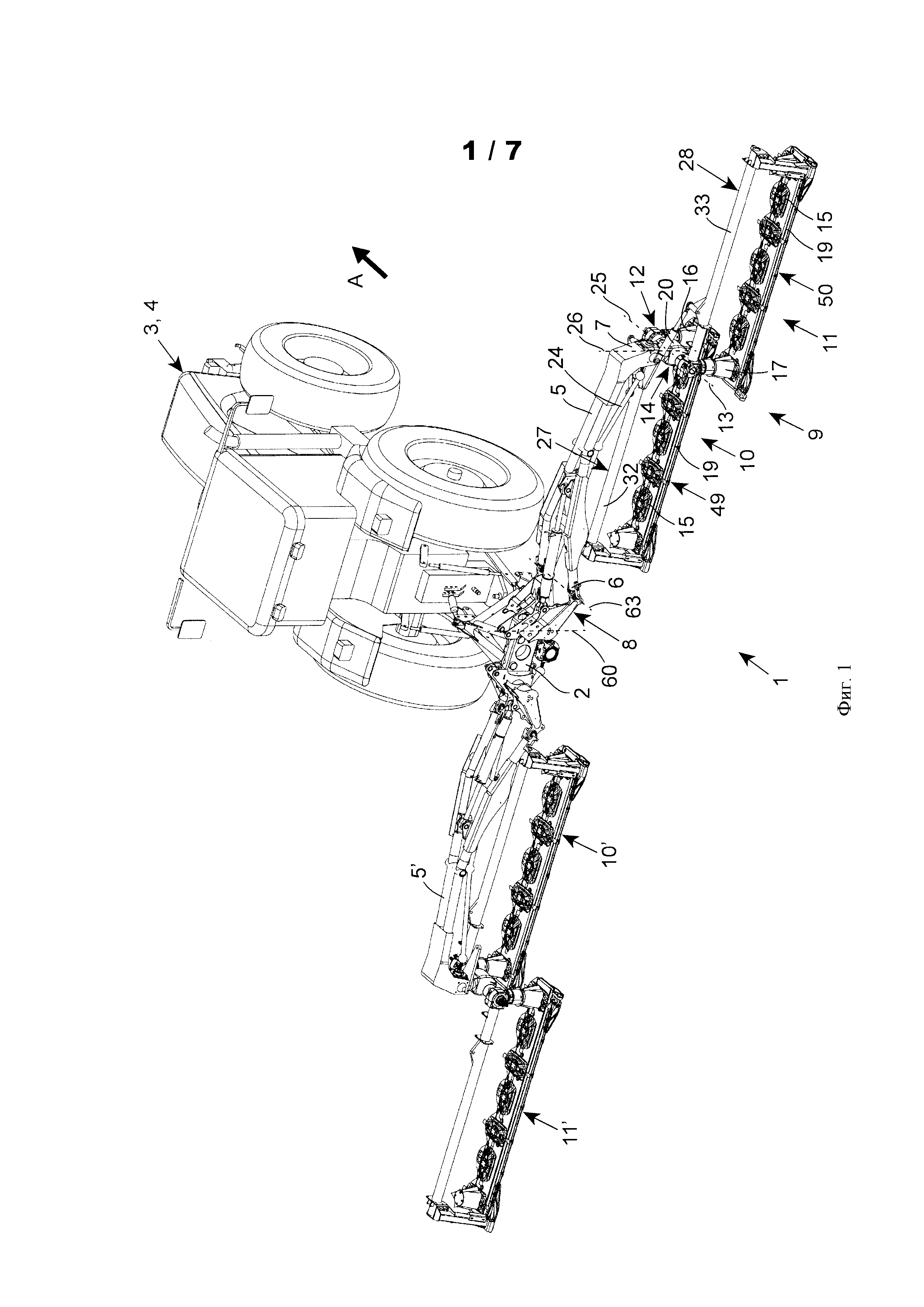
На фиг. 1 показан пример осуществления заявленной машины, сцепленной с трактором, вид в перспективе;
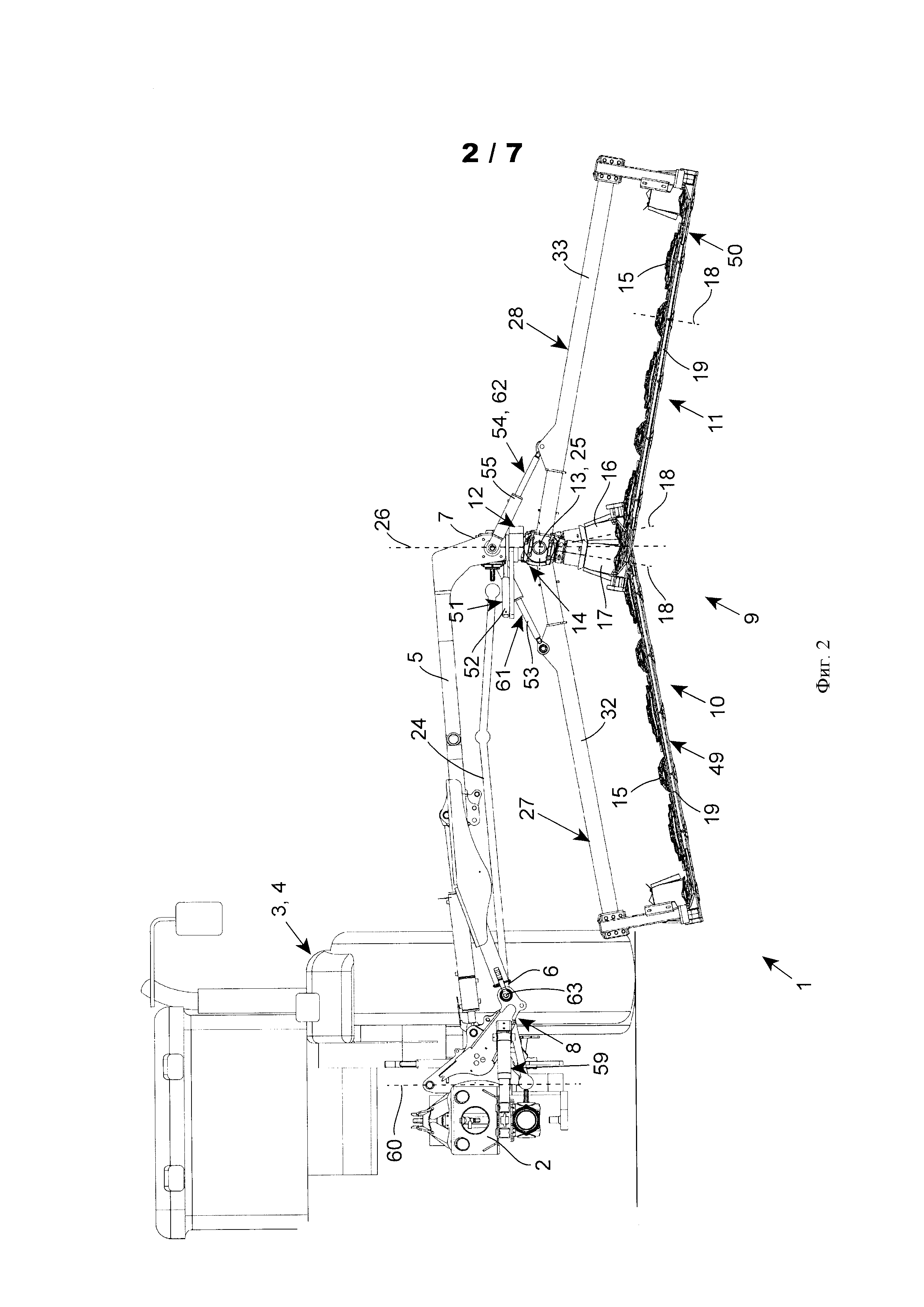
на фиг. 2 показан пример осуществления, вид сзади;
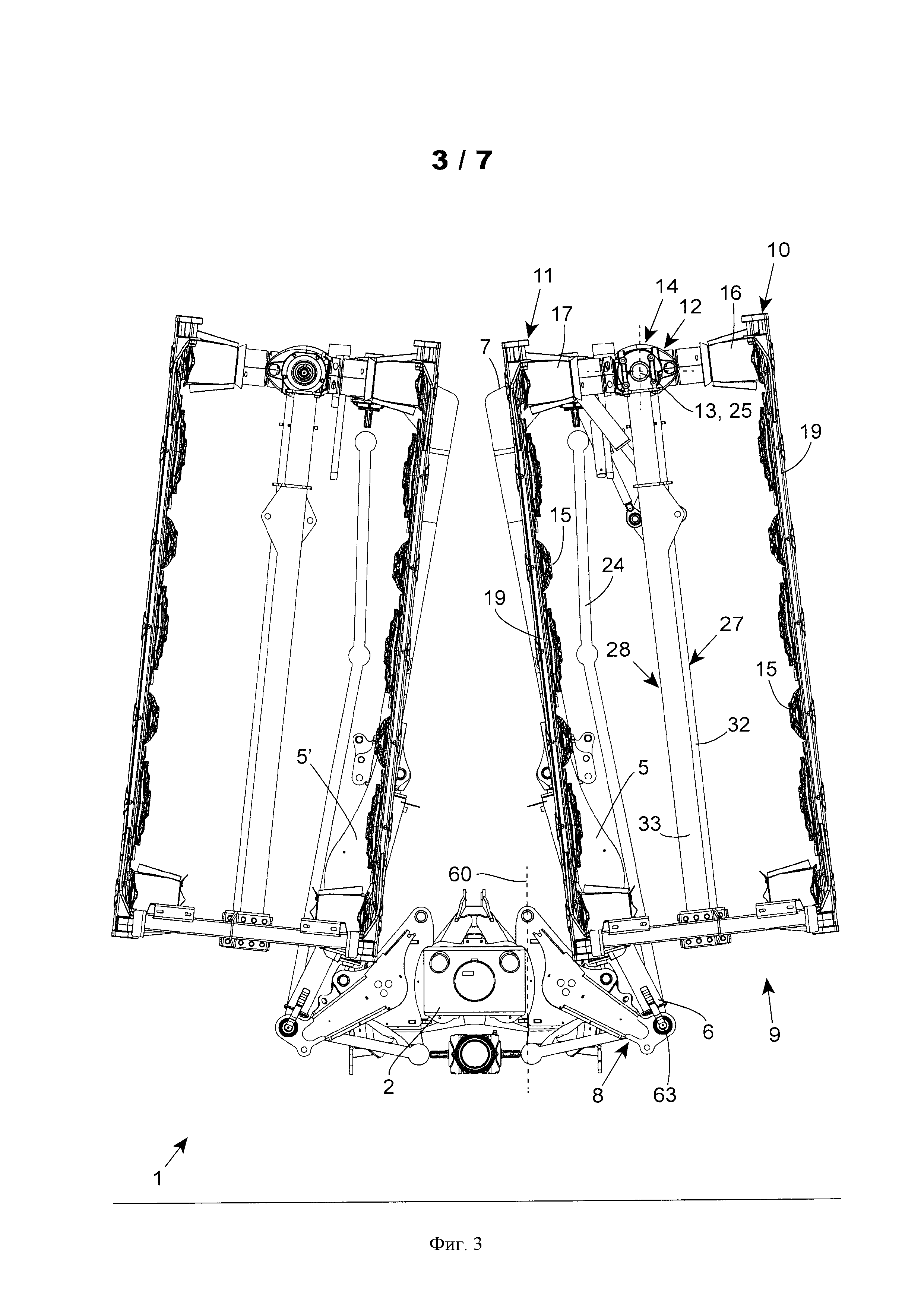
на фиг. 3 показан пример осуществления, другой вид сзади;
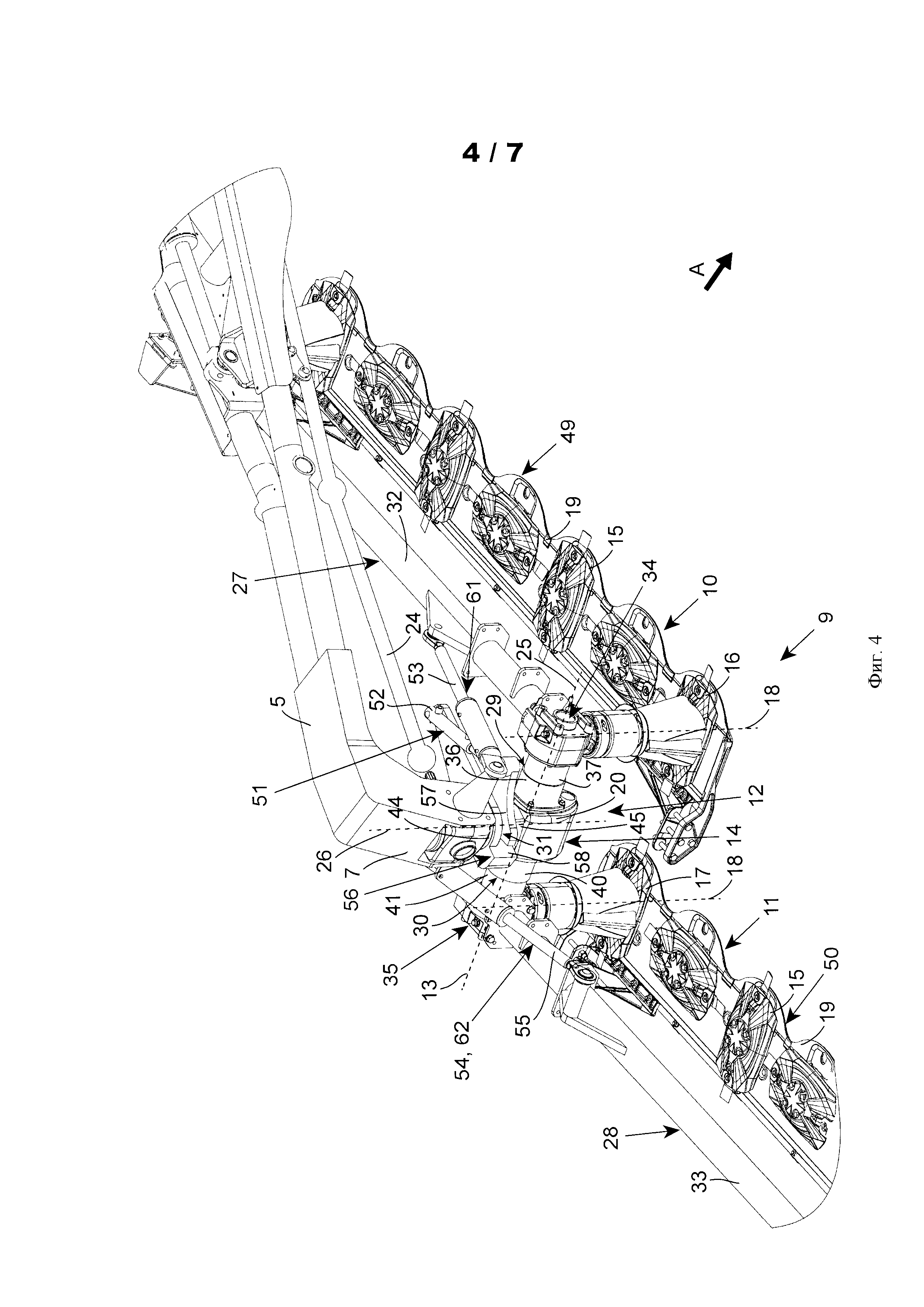
на фиг. 4 показан пример осуществления, детальный вид в перспективе;
на фиг. 5 показан пример осуществления, другой детальный вид в перспективе;
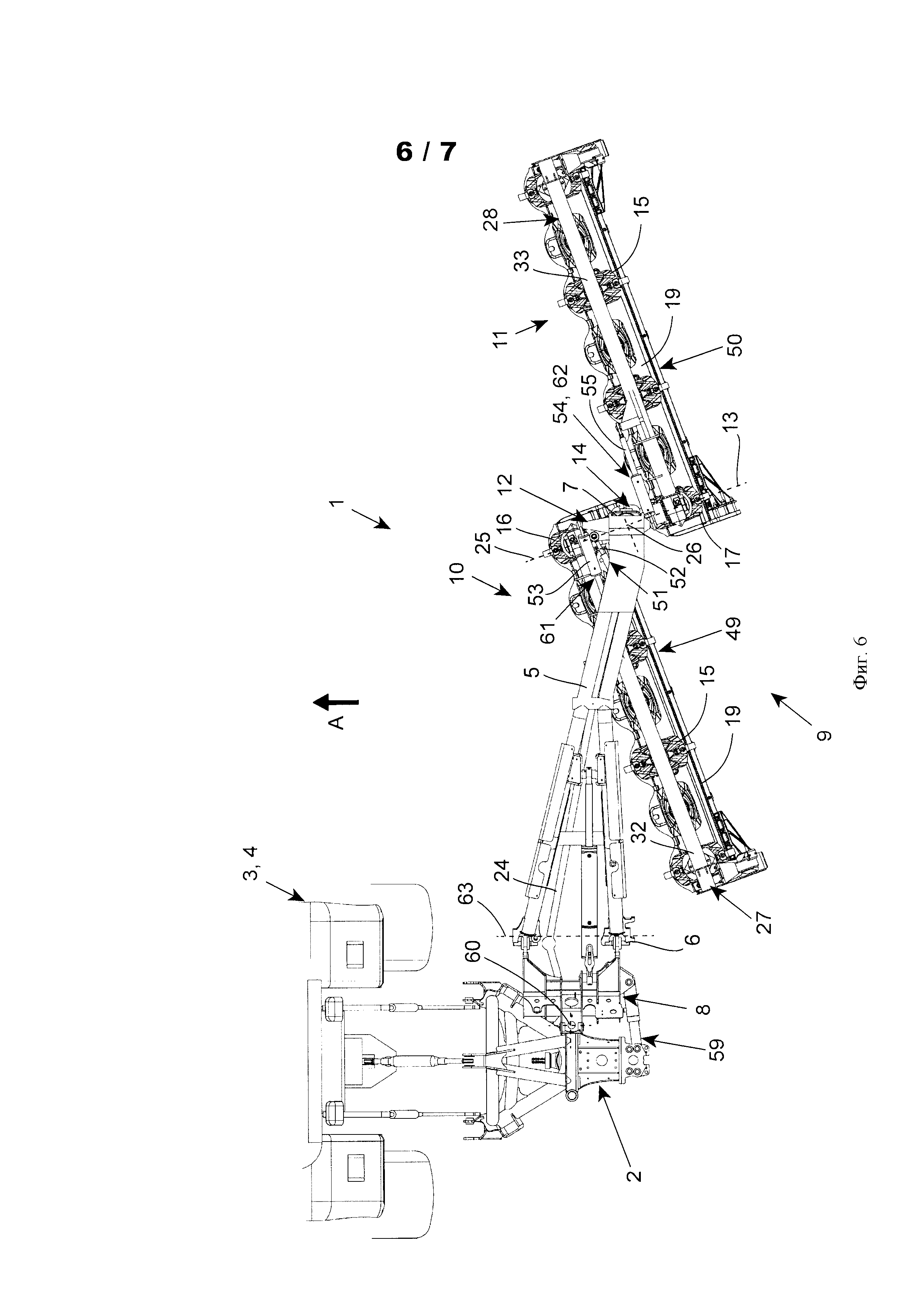
на фиг. 6 показан пример осуществления, вид сверху;
на фиг. 7 показан пример осуществления, другой вид сверху.
Показанная на фиг. 1 заявленная машина 1 является сельскохозяйственной машиной для уборки растений, в частности для заготовки растительных кормов. Эта машина 1 содержит шасси 2. Шасси 2 выполнено с возможностью сцепки с самоходным транспортным средством 3, которое может перемещаться в направлении А движения. В дальнейшем тексте описания понятия «передний», «задний» и «сзади» следует рассматривать относительно направления А движения, тогда как понятия «верхний» и «нижний» следует рассматривать относительно земли. Согласно примеру осуществления, показанному на фиг. 1, шасси 2 выполнено с возможностью соединения со сцепным устройством трактора 4, в частности со сцепным устройством, находящимся сзади трактора 4. Машина 1 содержит также стойку 5, соединенную с шасси 2. Стойка 5 выполнена между первым боковым концом 6 стойки 5 и вторым боковым концом 7 стойки 5. Вблизи первого бокового конца 6 стойка 5 соединена с шасси 2 при помощи первого шарнирного устройства 8. Первое шарнирное устройство 8 позволяет стойке 5 перемещаться относительно шасси 2 между рабочим положением и транспортировочным положением. В рабочем положении, показанном на фиг. 1 и 2, стойка 5 расположена сбоку относительно шасси 2. Согласно примеру осуществления, представленному на фигурах, в рабочем положении стойка 5 расположена по существу перпендикулярно к направлению А движения. По меньшей мере в рабочем положении первый боковой конец 6 стойки 5 находится вблизи шасси 2, тогда как второй боковой конец 7 находится дальше от шасси 2. Согласно примеру осуществления, в рабочем положении стойки 5 второй боковой конец 7 проходит за пределы колеи самоходного транспортного средства 3, которым является трактор 4. В транспортировочном положении стойки 5, показанном на фиг. 3, она повернута относительно шасси 2 таким образом, что перпендикулярно к направлению А движения имеет меньший габарит, чем в рабочем положении. Машина 1 содержит рабочий механизм 9. Рабочий механизм 9 содержит, в частности, первый рабочий агрегат 10, соединенный со стойкой 5. В рабочем положении стойки 5 этот первый рабочий агрегат 10 проходит, в частности, в направлении, перпендикулярном к направлению А движения, от второго бокового конца 7 стойки в сторону первого бокового конца 6. Действительно, как показано в задней проекции машины 1 на фиг.2, во время работы первый рабочий агрегат 10 расположен, в частности, между первым и вторым боковыми концами 6 и 7 стойки 5. В этой же задней проекции первый рабочий агрегат 10 в основном проходит между первым и вторым боковыми концами 6 и 7 стойки 5. Согласно примеру осуществления, в рабочем положении стойки 5 первый рабочий агрегат 10 в основном находится между колеей самоходного транспортного средства 3 и вторым боковым концом 7 стойки 5. Во время работы первый рабочий агрегат 10 расположен по существу перпендикулярно к направлению А движения. Рабочий механизм 9 содержит также второй рабочий агрегат 11, соединенный со стойкой 5. В рабочем положении стойки 5 этот второй рабочий агрегат 11 расположен, в частности, в направлении, перпендикулярном к направлению А движения и ориентированном от первого бокового конца 6 ко второму боковому концу 7, начиная от второго бокового конца 7 стойки 5. Действительно, как показано на фиг. 2 в задней проекции машины 1, во время работы второй рабочий агрегат 11 проходит, в частности, от второго бокового конца 7 стойки 5 и в основном находится за пределами стойки 5. В этой же задней проекции второй рабочий агрегат 11 находится в продолжении первого рабочего агрегата 10. Во время работы второй рабочий агрегат 11 расположен по существу перпендикулярно к направлению А движения. Машина 1 содержит также второе шарнирное устройство 12, установленное на стойке 5 вблизи ее второго бокового конца 7. Второе шарнирное устройство 12 соединяет второй рабочий агрегат 11 со стойкой 5 вблизи второго бокового конца 7. Таким образом, второй рабочий агрегат 11 установлен на стойке 5 по существу на уровне второго бокового конца 7 стойки 5. Второе шарнирное устройство 12 позволяет второму рабочему агрегату 11 поворачиваться относительно стойки 5 вокруг второй геометрической оси 13, находящейся вблизи второго бокового конца 7 и ориентированной в рабочем положении стойки 5 по существу в направлении А движения. В частности, во время работы второй рабочий агрегат 11 может поворачиваться вокруг второй геометрической оси 13 таким образом, чтобы следовать профилю поля. Кроме того, машины 1 содержит трансмиссионный механизм 14, предназначенный для приведения в действие рабочих орудий 15, 16, 17 первого и второго рабочих агрегатов 10 и 11. Этот трансмиссионный механизм 14 установлен, в частности, на стойке 5 вблизи второго бокового конца 7.
Каждый рабочий агрегат 10, 11 является агрегатом для уборки растений. Каждый рабочий агрегат 10, 11 содержит по меньшей мере одно рабочее орудие 15, 16, 17. Согласно примеру осуществления, рабочее орудие 15, 16, 17 является режущим орудием, предназначенным для скашивания растений. Режущее орудие является, например, режущим ротором, который может вращаться вокруг оси 18 вращения и который во время работы расположен по существу вертикально или с небольшим наклоном вперед. Этот режущий ротор представляет собой диск или барабан, оснащенный лезвиями, которые выступают за пределы периферии указанного диска или барабана. Различные рабочие орудия 15, 16, 17 рабочего агрегата 10, 11 установлены на опорных подшипниках, расположенных через более или менее равномерные промежутки на брусе 19, и во время работы приводятся в быстрое вращение при помощи зубчатых передач, встроенных в герметичный картер, содержащий смазку, такую как масло. Во время вращения лезвия режущего ротора срезают находящиеся над землей растения.
Во время работы предусмотрено частичное перекрывание между рабочей шириной первого рабочего агрегата 10 и рабочей шириной второго рабочего агрегата 11. Первый рабочий агрегат 10 содержит по меньшей мере одно первое рабочее орудие 16. Второй рабочий агрегат 11 содержит по меньшей мере одно второе рабочее орудие 17. Согласно примеру осуществления, представленному на фиг. 1 и 2, первое рабочее орудие 16 находится перпендикулярно к направлению А движения на уровне второго бокового конца 7 стойки 5. Согласно этому примеру осуществления, второе рабочее орудие 17 находится перпендикулярно к направлению А движения на уровне второго бокового конца 7 стойки 5. Первая рабочая ширина первого рабочего орудия 16 по меньшей мере частично перекрывает вторую рабочую ширину второго рабочего орудия 17. Первая и вторая рабочая ширина являются по существу идентичными. Каждая рабочая ширина соответствующего рабочего агрегата 10, 11 является сплошной рабочей шириной. Рабочий механизм 9 имеет сплошную рабочую ширину. Кроме того, по меньшей мере во время работы первый и второй рабочие агрегаты 10, 11 смещены относительно друг друга в направлении А движения. Один 11 из первого и второго рабочих агрегатов 10 и 11 находится непосредственно сзади другого 10 из первого и второго рабочих агрегатов 10 и 11. Во время работы по меньшей мере одно рабочее орудие 16 первого рабочего агрегата 10, а также по меньшей мере одно рабочее орудие 17 второго рабочего агрегата 11 находятся одно сзади другого и на небольшом расстоянии друг от друга. Согласно примеру осуществления, показанному на фигурах, первое рабочее орудие 16 и второе рабочее орудие 17 находятся одно сзади другого и на небольшом расстоянии друг от друга. В направлении А движения первое и второе рабочие орудия 16 и 17 удалены друг от друга на значение, меньшее значений их рабочей ширины.
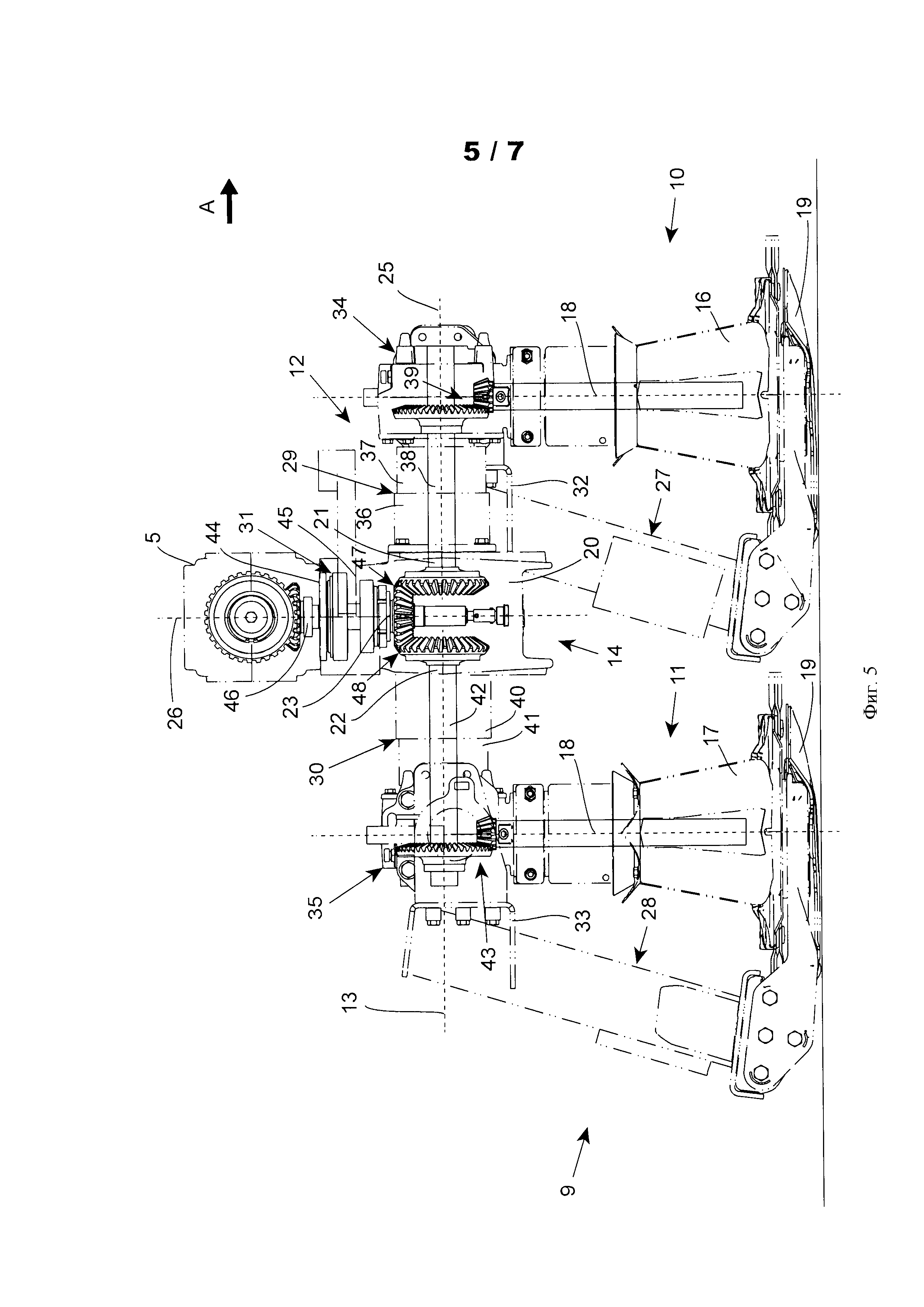
Согласно примеру осуществления, более детально представленному на фиг. 4 и 5, трансмиссионный механизм 14 содержит коробку 20, установленную на стойке 5 вблизи второго бокового конца 7. Эта коробка 20 содержит первый выход 21 в сторону по меньшей мере одного рабочего орудия 16 первого рабочего агрегата 10. Коробка 20 содержит также второй выход 22 в сторону по меньшей мере одного рабочего орудия 17 второго рабочего агрегата 11. Согласно примеру осуществления, первый выход 21 приводит во вращение первое рабочее орудие 17, расположенное на уровне второго бокового конца 7 стойки 5. Кроме того, второй выход 22 приводит во вращение второе рабочее орудие 17, расположенное на уровне второго бокового конца 7 стойки 5. Первое рабочее орудие 16 передает свое движение вращения на другие рабочие орудия 15 первого рабочего агрегата 10 при помощи зубчатой передачи, находящейся в картере первого рабочего агрегата 10. Точно так же, второе рабочее орудие 17 передает свое движение вращения на другие рабочие орудия 15 второго рабочего агрегата 11 при помощи зубчатой передачи, находящейся в картере второго рабочего агрегата 11. Коробка 20 соединена с приводным средством, обеспечивающим приведение в движение рабочих орудий 15, 16, 17 первого и второго рабочих агрегатов 10 и 11. Приводное средство может находиться на самоходном транспортном средстве 3 или на самой машине 1. Согласно примеру осуществления, показанному на фиг. 5, коробка 20 содержит вход 23, соединенный с приводным средством. Этот вход 23 соединен с первым трансмиссионным валом 24, схематично показанным на фиг. 4 и проходящим вдоль стойки 5 в направлении шасси 2. Этой первый трансмиссионный вал 24 приводится в движение при помощи приводного средства, которым является коробка отбора мощности трактора 4.
Согласно изобретению, второе шарнирное устройство 12 соединяет первый рабочий агрегат 10 со стойкой 5 вблизи второго бокового конца 7 стойки 5. Кроме того, во время работы второе шарнирное устройство 12 позволяет первому рабочему агрегату 10 поворачиваться относительно стойки 5 вокруг первой геометрической оси 25, в частности, чтобы следовать профилю поля. Эта первая геометрическая ось 25 находится вблизи второго бокового конца 7 стойки 5. Первая геометрическая ось 25 расположена перпендикулярно к направлению А движения на уровне второго бокового конца 7. Когда стойка 5 находится в рабочем положении, первая геометрическая ось 25 ориентирована по существу в направлении А движения. Близость первой геометрической оси 25 и трансмиссионного механизма 14, которые находятся вблизи второго бокового конца 7 стойки 5, обеспечивает возможность поворота с большой амплитудой первого рабочего агрегата 10 относительно стойки 5, в частности, во время работы. Трансмиссионный механизм 14 не ограничивает амплитуду этого поворота.
Также согласно изобретению, второе шарнирное устройство 12 содержит поворотную ось 26, ориентированную вверх в рабочем положении стойки 5. Кроме того, трансмиссионный механизм 14 установлен с возможностью поворота на стойке 5 вокруг поворотной оси 26. Наконец, в положении стойки 5, в котором стойка 5 находится сбоку относительно шасси 2, трансмиссионный механизм 14 и по меньшей мере один из первого и второго рабочих агрегатов 10 и 11 могут совместно поворачиваться вокруг поворотной оси 26. Этот совместный поворот может происходить, в частности, когда стойка 5 находится в рабочем положении. Монтаж по меньшей мере одного из первого и второго рабочих агрегатов 10 и 11 вокруг по существу вертикальной поворотной оси 26 позволяет этому рабочему агрегату 10, 11 отходить назад в случае столкновения с препятствием, не подвергаясь серьезным повреждениям. В этом случае совместный поворот трансмиссионного механизма 14 позволяет избежать передачи ударов и толчков, которым подвергается рабочий агрегат 10, 11, на подвижные части трансмиссионного механизма 14. За счет этого повышается надежность трансмиссионного механизма 14.
Согласно предпочтительному отличительному признаку изобретения,
указанный по меньшей мере один из первого и второго рабочих агрегатов 10 и 11 содержит опору 27, 28,
на опоре 27, 28 установлено по меньшей мере одно рабочее орудие 15, 16, 17, которое может приводиться во вращение относительно опоры 27, 28 при помощи трансмиссионного механизма 14 и вокруг оси 18 вращения, которая во время работы остается по существу неподвижной относительно опоры 27, 28,
опора 27, 28 шарнирно установлена на стойке 5 при помощи первого опорного подшипника 29, 30, соединенного с опорой 27, 28 и имеющего в качестве оси соответствующую первую или вторую геометрическую ось 25, 13 указанного по меньшей мере одного из первого и второго рабочих агрегатов 10 и 11, и при помощи второго опорного подшипника 31, соединенного с первым опорным подшипником 29, 30 и со стойкой 5 и имеющего в качестве оси поворотную ось 26.
Таким образом, по меньшей мере один из указанных первого и второго рабочих агрегатов 10 и 11 шарнирно соединен со стойкой 5 через два опорных подшипника 29 и 31, 30 и 31, расположенных друг за другом и между стойкой 5 и соответствующей опорой 27, 28. Такая конструкция является простой и недорогой.
Первый рабочий агрегат 10 содержит первую опору 27. Второй рабочий агрегат 11 содержит вторую опору 28. Первая опора 27, соответственно вторая опора 28 является жесткой и не имеет шарнирно соединенных между собой секций. Первая опора 27 содержит первую балку 32. Вторая опора 28 содержит вторую балку 33. Во время работы первая балка 32, соответственно вторая балка 33 расположена по существу перпендикулярно к направлению А движения. Кроме того, она расположена над рабочими орудиями 15, 16, 17 соответствующего рабочего агрегата 10, 11. Во время работы в верхней проекции машины 1 первая балка 32, соответственно вторая балка 33 расположена по существу между боковыми концами бруса 19, на котором установлены рабочие орудия 15, 16, 17 соответствующего рабочего агрегата 10, 11. Как видно на фиг. 4, первая балка 32 содержит на своем боковом конце, смежном со вторым боковым концом 7 стойки 5, первый картер 34 угловой передачи. На этом первом картере 34 угловой передачи установлено первое рабочее орудие 16, и он позволяет приводить его во вращение вокруг его оси 18 вращения. Вторая балка 33 содержит на своем боковом конце, смежном со вторым боковым концом 7 стойки 5, второй картер 35 угловой передачи. На этом втором картере 35 угловой передачи установлено второе рабочее орудие 17, и он позволяет приводить его во вращение вокруг его оси 18 вращения.
Первая опора 27 установлена на стойке 5 при помощи, в частности, первого опорного подшипника 29, соединенного с первой опорой 27. Осью этого первого опорного подшипника 29 является первая геометрическая ось 25. Неподвижная часть 36 этого опорного подшипника 29 соединена с трансмиссионным механизмом 14, тогда как вращающаяся часть 37 этого первого опорного подшипника 29 соединена с первой опорой 27. Согласно примеру осуществления, показанному на фиг. 4, неподвижная часть 36 первого опорного подшипника 29 соединена с коробкой 20. Вращающаяся часть 37 соединена с первым картером 34 угловой передачи. Первый выход 21 коробки 20 соединен с первым валом 38, проходящим через первый опорный подшипник 29 в сторону трансмиссионных средств 39, находящихся внутри первого картера 34 угловой передачи. Коробка 20 и первый картер 34 угловой передачи соединены друг с другом по существу герметично при помощи первого опорного подшипника 29. Таким образом, первый вал 38 защищен от загрязнений. Кроме того, исключается риск наматывания растений вокруг первого вала 38 во время работы. Первый вал 38 является коаксиальным с первой геометрической осью 25. Такая конструкция позволяет отказаться от кулисного и/или шарнирного соединения (шлицы, кардан) на уровне передачи движения между первым выходом 21 и первым картером 34 угловой передачи. В аналогичной конструкции вторая опора 28 установлена на стойке 5, в частности, при помощи другого первого опорного подшипника 30, соединенного со второй опорой 28. Осью этого другого первого опорного подшипника 30 является вторая геометрическая ось 13. Неподвижная часть 40 этого другого первого опорного подшипника 30 соединена с трансмиссионным механизмом 14, тогда как вращающаяся часть 41 этого другого опорного подшипника 30 соединена со второй опорой 28. Согласно примеру осуществления, представленному на фигурах, неподвижная часть 40 другого первого опорного подшипника 30 соединена с коробкой 20. Вращающаяся часть 41 соединена со вторым картером 35 угловой передачи. Второй выход 22 коробки 20 соединен со вторым валом 42, проходящим через другой первой опорный подшипник 30 в сторону трансмиссионных средств 43, находящихся внутри второго картера 35 угловой передачи. Коробка 20 и второй картер 35 угловой передачи соединены друг с другом по существу герметично при помощи другого первого опорного подшипника 30. Таким образом, второй вал 42 защищен от загрязнений. Кроме того, исключается риск наматывания растений вокруг второго вала 42 во время работы. Второй вал 42 является коаксиальным со второй геометрической осью 13. Такая конструкция позволяет отказаться от кулисного и/или шарнирного соединения (шлицы, кардан) на уровне передачи движения между вторым выходом 222 и вторым картером 35 угловой передачи.
Таким образом, как показано на фиг. 4 и 5, первая опора 27 установлена на стойке 5 также при помощи второго опорного подшипника 31, соединенного с первым опорным подшипником 29 и со стойкой 5. Неподвижная часть 44 этого второго опорного подшипника 31 соединена со стойкой 5, тогда как вращающаяся часть 45 этого второго опорного подшипника 31 соединена с трансмиссионным механизмом 14. Согласно примеру осуществления, вращающаяся часть 45 второго опорного подшипника 31 соединена с коробкой 20. Следовательно, вращающаяся часть 45 второго опорного подшипника 31 соединена с неподвижной частью 36 первого опорного подшипника 29. Кроме того, коробка 20 установлена с возможностью поворота на стойке 36 при помощи второго опорного подшипника 31, осью которого является поворотная ось 26. Таким образом, кроме того, что трансмиссионный механизм 14 обеспечивает приведение во вращение рабочих орудий 15, 16 первого рабочего агрегата 10, он образует также элемент, несущий первый рабочий агрегат 10. При помощи этого несущего элемента первая опора 27 первого рабочего агрегата 10 установлена непосредственно на стойке 5. Эта конструкция позволяет уменьшить вес машины 1, в частности вес элементов, подвешенных относительно шасси 2. Трансмиссионный механизм 14 и первая опора 27 образуют вместе жесткий во вращении узел в плоскости, перпендикулярной к поворотной оси 26. Следовательно, трансмиссионный механизм 14 следует движениям, которые первый рабочий агрегат 10 совершает вокруг поворотной оси 26. В аналогичной конструкции, вторая опора 28 установлена на стойке 5 при помощи второго опорного подшипника 31, соединенного также с другим первым опорным подшипником 30. Действительно, вращающаяся часть 45 второго опорного подшипника 31 соединена через коробку 20 с неподвижной частью другого первого опорного подшипника 30. Таким образом, кроме того, что трансмиссионный механизм 14 обеспечивает приведение во вращение рабочих орудий 15, 16 второго рабочего агрегата 11, он образует также элемент, несущий второй рабочий агрегат 11. При помощи этого несущего элемента вторая опора 28 второго рабочего агрегата 11 установлена непосредственно на стойке 5. Трансмиссионный механизм 14 и вторая опора 28 образуют вместе жесткий во вращении узел в плоскости, перпендикулярной к поворотной оси 26. Таким образом, трансмиссионный механизм 14 следует движениям, которые совершает второй рабочий агрегат 11 вокруг поворотной оси 26.
Согласно предпочтительному отличительному признаку изобретения, второе шарнирное устройство 12 выполнено таким образом, чтобы в положении стойки 5, в котором она расположена сбоку относительно шасси 2, в частности, в рабочем положении стойки 5,
трансмиссионный механизм 14 и первый рабочий агрегат 10 могли поворачиваться вместе вокруг поворотной оси 26,
и чтобы трансмиссионный механизм 14 и второй рабочий агрегат 11 могли поворачиваться вместе вокруг поворотной оси 26.
Таким образом, трансмиссионный механизм 14 не требует наличия множества шарниров и/или кулисного соединения на уровне передачи движения в сторону рабочих орудий 15, 16 первого рабочего агрегата 10, а также в сторону рабочих орудий второго рабочего агрегата 11. Кроме того, каждый рабочий агрегат 10, 11 может поворачиваться вокруг поворотной оси 26 в случае столкновения рабочего механизма 9 с препятствием. Совместный поворот трансмиссионного механизма 14 и этого рабочего агрегата 10, 11 позволяет избежать передачи ударов и толчков, которым может подвергаться рабочий механизм 9, на подвижные части трансмиссионного механизма 14.
Согласно примеру осуществления изобретения, первый рабочий агрегат 10, второй рабочий агрегат 11 и трансмиссионный механизм 14 могут вместе поворачиваться вокруг поворотной оси 26. Во время работы усилия сопротивления, действующие на первый рабочий агрегат 10 и стремящиеся повернуть его назад относительно стойки 5, в большей или меньшей степени оказываются компенсированы усилиями сопротивления, которые одновременно действуют на второй рабочий агрегат 11. В частности, согласно изобретению, трансмиссионный механизм 14, первая опора 27 и вторая опора 28 образует вместе жесткий во вращении узел в плоскости, перпендикулярной к поворотной оси 26.
Согласно предпочтительному отличительному признаку изобретения, первая геометрическая ось 25 первого рабочего агрегата 10 по меньшей мере по существу пересекает поворотную ось 26. Этот отличительный признак позволяет, в частности, связать вход 23 коробки 20 со вторым трансмиссионным валом 46, коаксиальным с поворотной осью 26, и расположить внутри коробки 20 первую угловую передачу 47 с зубчатыми колесами между этим вторым трансмиссионным валом 46 и первым валом 38. Этот отличительный признак позволяет также уменьшить механические напряжения, действующие на трансмиссионный механизм 14, в частности, на второй опорный подшипник 31 и на коробку 20, когда первый рабочий агрегат 10 поворачивается вокруг первой геометрической оси 25. Согласно примеру осуществления, первая геометрическая ось 25 пересекает поворотную ось 26.
Согласно другому предпочтительному отличительному признаку изобретения, вторая геометрическая ось 13 второго рабочего агрегата 11 по меньшей мере по существу пересекает поворотную ось 26. Этот отличительный признак позволяет, в частности, связать вход 23 коробки 20 со вторым трансмиссионным валом 46 и получить внутри коробки 20 вторую угловую передачу 48 с зубчатыми колесами между этим вторым трансмиссионным валом 46 и вторым валом 42. Этот отличительный признак позволяет также уменьшить механические напряжения, действующие на трансмиссионный механизм 14, в частности на второй опорный подшипник 31 и на коробку 20, когда второй рабочий агрегат 11 поворачивается вокруг второй геометрической оси 13. Согласно примеру осуществления, вторая геометрическая ось 13 пересекает поворотную ось 26.
Следует также отметить, что в примере осуществления, показанном на фиг. 4 и 5, каждая из первой и второй геометрических осей 25 и 13 по меньшей мере по существу пересекает поворотную ось 26. Кроме того, первая и вторая геометрические оси 25 и 13 находятся на одной линии.
Как показано, в частности, на фиг. 1, первый рабочий агрегат 10 содержит первый участок 49, который в рабочем положении стойки 5 и в направлении, перпендикулярном к направлению А движения, расположен между первым боковым концом 6 и вторым боковым концом 7. Во время работы этот первый участок 49 занимает первое рабочее положение. Согласно примеру осуществления, в этом первом рабочем положении первый участок 49 расположен по существу перпендикулярно к направлению А движения. Согласно предпочтительному отличительному признаку изобретения, в положении стойки 5, в котором она расположена сбоку относительно шасси 2, первый участок 49 может покинуть первое рабочее положение посредством первого поворота назад относительно стойки 5 вокруг поворотной оси 26. Этот первый поворот может, в частности, происходить в рабочем положении стойки 5. Этот первый поворот назад располагает первый участок 49 первого рабочего агрегата 10 в положение относительно стойки 5, показанное на фиг. 4 и 6. Это положение является безопасным положением, которое первый рабочий агрегат 10 может занять, когда первый участок 49 наталкивается на препятствие. Это может произойти, в частности, в случае столкновения между этим препятствием и рабочим орудием 15, 16 и/или опорой 27 первого участка 49.
Как показано, в частности, на фиг. 1, второй рабочий агрегат 11 содержит второй участок 50, который в рабочем положении стойки 5 и в направлении, перпендикулярном к направлению А движения и ориентированном от первого бокового конца 6 ко второму боковому концу 7, расположен за пределами второго бокового конца 7. Во время работы этот второй участок 50 занимает второе рабочее положение. Согласно примеру осуществления, в этом втором рабочем положении второй участок 50 расположен по существу перпендикулярно к направлению А движения. На фиг. 6 показано, что в положении стойки 5, в котором она расположена сбоку относительно шасси 2, второй участок 50 может покинуть второе рабочее положение посредством второго поворота вперед относительно стойки 5 вокруг поворотной оси 26. Этот второй поворот может, в частности, происходить в положении стойки 5, показанном на фиг. 6.
Согласно примеру осуществления, первый поворот и второй поворот связаны друг с другом. Первый поворот приводит ко второму повороту. Действительно, первая опора 27 и вторая опора 28 образуют жесткий во вращении узел в плоскости, перпендикулярной к поворотной оси 26.
Заявленная машина 1 предпочтительно содержит первое средство 51 срабатывания, расположенное между стойкой 5 и первым или вторым рабочим агрегатом 10, 11. Первое средство 51 срабатывания обеспечивает первый поворот первого участка 19, только когда усилие, действующее на первый участок 49, создает на первом средстве 51 срабатывания усилие, превышающее первый определенный порог. Таким образом, во время работы первое средство 51 срабатывания обычно удерживает первый участок в направлении, по существу перпендикулярном к направлению А движения. Однако в случае столкновения с препятствием, создающего на первом средстве 51 срабатывания усилие, превышающее первый порог, первый участок 49 может отойти в направлении своего безопасного положения. Согласно примеру осуществления, показанному на фиг. 4, первое средство 51 срабатывания содержит домкрат 52 срабатывания, шарнирно соединенный со стойкой 5 и с первой опорой 27, в частности со стойкой 5 и с коробкой 20 трансмиссионного механизма 14.
Согласно предпочтительному отличительному признаку изобретения, когда первое средство 51 срабатывания обеспечивает первый поворот первого участка 49, первое средство 51 срабатывания задает дополнительный поворот вверх первого участка 49 вокруг первой геометрической оси 25. Таким образом, рабочие орудия 15, 16 первого участка 49 поднимаются над землей и могут пройти над препятствием типа камня или пенька дерева, которое стало причиной срабатывания. Это позволяет значительно уменьшить возможные повреждения первого рабочего агрегата 10. Согласно примеру осуществления, показанному на фиг. 4, первый домкрат 53 шарнирно установлен между первой опорой 27 и стойкой 5 или трансмиссионным механизмом 14. Изменение длины этого первого домкрата 53 заставляет первый рабочий агрегат 10 повернуться вокруг первой геометрической оси 25. Первый домкрат 53 гидравлически связан с домкратом 52 срабатывания. Таким образом, когда домкрат 52 срабатывания обеспечивает первый поворот вокруг поворотной оси 26, он управляет первым домкратом 53, который одновременно поднимает первый участок 49 вокруг первой геометрической оси 25.
Согласно предпочтительному отличительному признаку машины 1, она содержит второе средство 54 срабатывания, расположенное между стойкой 5 и первым или вторым рабочим агрегатом 10, 11. Когда второй участок 50 совершает второй поворот, второе средство 54 срабатывания задает дополнительный поворот вверх второго участка 50 вокруг второй геометрической оси 13. Этот дополнительный поворот вверх второго участка 50 уменьшает площадь его трения с землей и, следовательно, облегчает одновременный поворот первого участка 49 назад вокруг поворотной оси 26. Кроме того, дополнительный поворот вверх второго участка 50 уменьшает риск столкновения второго участка 50 во время его второго поворота вперед с препятствием, находящимся спереди машины 1. Согласно примеру осуществления, показанному на фиг. 4, второй домкрат 55 шарнирно установлен между второй опорой 28 и стойкой 5 или трансмиссионным механизмом 14. Изменение длины этого второго домкрата 55 заставляет второй рабочий агрегат 11 повернуться вокруг второй геометрической оси 13. Второй домкрат 55 гидравлически связан с домкратом 52 срабатывания. Таким образом, когда домкрат 52 срабатывания обеспечивает первый поворот вокруг поворотной оси 26, он управляет вторым домкратом 55, который одновременно поднимает второй участок 50 вокруг второй геометрической оси 13.
Согласно предпочтительному отличительному признаку изобретения, машина 1 содержит средство 56 упора, обеспечивающее первый поворот назад первого участка 49 первого рабочего агрегата 10 из первого рабочего положения. С другой стороны, средство 56 упора ограничивает и даже препятствует повороту первого участка 49 вперед относительно стойки 5 вокруг поворотной оси 26 из первого рабочего положения. Таким образом, средство 56 упора не позволяет первому участку 49 столкнуться с частями шасси 2, находящимися в передней части машины 1, и/или с частями самоходного транспортного средства 3. Это преимущество более наглядно представлено на фиг. 6, где показано колесо трактора 4, расположенное спереди первого бокового конца 6 стойки 5. Согласно примеру осуществления, средство 56 упора позволяет избегать такого столкновения между рабочим орудием 15, ближайшим к шасси 2, и колесом трактора 4, расположенным с этой же стороны. Как показано на фиг. 4, средство 56 упора содержит, например, первую часть 57, связанную с трансмиссионным механизмом 14, и вторую часть 58, связанную со стойкой 5. Эти две части 57 и 58 могут поворачиваться относительно друг друга вокруг поворотной оси 26 свободно в одном направлении, но ограниченно в другом направлении.
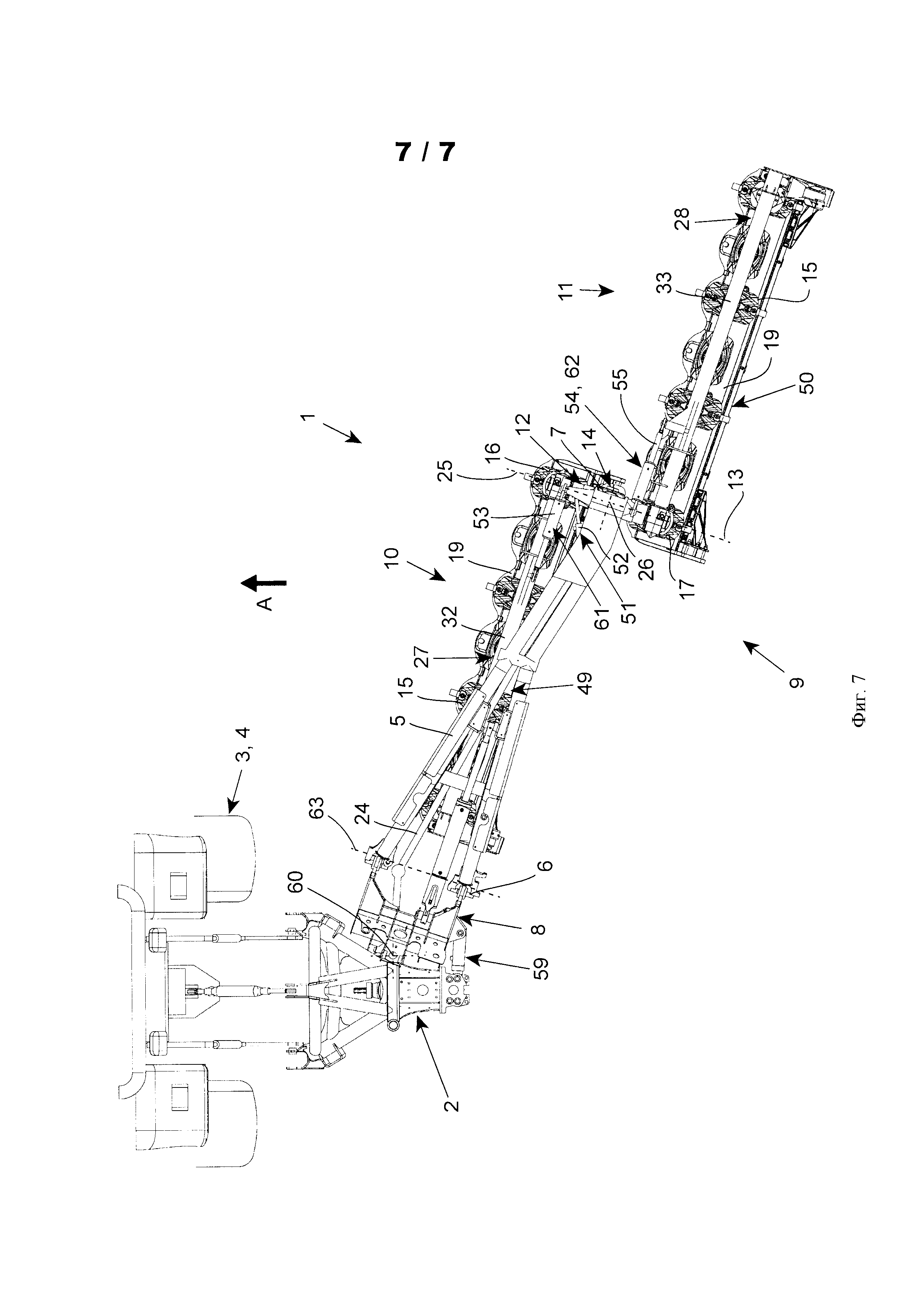
Кроме того, средство 56 упора может быть выполнено так, чтобы ограничивать и даже препятствовать повороту второго участка 50 назад относительно стойки 5 вокруг поворотной оси 26 из второго положения относительно стойки 5, занимаемого вторым участком 50 во время работы машины 1. Таким образом, если во время работы второй участок 50 наталкивается на находящееся перед ним препятствие, второй рабочий агрегат 11 сохраняет свое положение, первоначально занимаемое относительно стойки 5. Чтобы предохранить второй рабочий агрегат 11 в подобной ситуации, изобретением предусмотрено третье средство 59 срабатывания, соединенное с шасси 2. Это третье средство 59 срабатывания позволяет стойке 5 отходить назад относительно самоходного транспортного средства 3, когда усилие, действующее на стойку 5, приводит к появлению усилия на третьем средстве 59 срабатывания, превышающего третий определенный порог. Таким образом, в случае столкновения второго участка 50 с находящимся перед ним препятствием, второй рабочий агрегат 11 может повернуться назад относительно самоходного транспортного средства 3 вокруг оси 60, направленной вверх и находящейся, например, на уровне шасси 2. Таким образом, стойка 5 и второй рабочий агрегат 11 ориентированы, как показано на фиг. 7. Согласно примеру осуществления, представленному на этой фигуре, третье средство 59 срабатывания шарнирно установлено между стойкой 5 и шасси 2. Оно содержит, например, домкрат. Первое шарнирное устройство 8, соединяющее стойку 5 с шасси 2, содержит направленную вверх ось 60, вокруг которой стойка 5 может повернуться назад. Кроме того, изобретение может предусматривать, чтобы во время работы столкновение первого участка 49 с препятствием привело к одновременному срабатыванию первого и третьего средств 51 и 59 срабатывания. В этом случае первый участок 49 поворачивается назад относительно стойки 5 вокруг поворотной оси 26 фиг. 6, тогда как стойка 5 поворачивается назад относительно самоходного транспортного средства 3 фиг. 7.
Согласно предпочтительному отличительному признаку изобретения, второе шарнирное устройство 12 позволяет каждому из первого и второго рабочих агрегатов 10 и 11 поворачиваться относительно стойки 5 в рабочем положении вокруг ее соответствующей первой или второй геометрической оси 25, 13 вверх и вниз из горизонтального положения независимо от другого из первого и второго рабочих агрегатов 10 и 11. Этот отличительный признак вытекает, в частности, из фиг. 2. Таким образом, каждый рабочий агрегат 10, 11 может следовать профилю поля. Благодаря независимости соответствующих поворотов, рабочий механизм 9 хорошо адаптирован к земле, в том числе при рабочих агрегатах 10 и 11 большой ширины.
Чтобы обеспечивать хорошее качество работы, машина 1 содержит средство 61, 62 разгрузки первого и второго рабочих агрегатов 10 и 11. Оно расположено между стойкой 5 и по меньшей мере одним из первого и второго рабочих агрегатов 10 и 11. Согласно примеру осуществления, первое средство 61 разгрузки шарнирно установлено между первой опорой 27 и стойкой 5 или трансмиссионным механизмом 14. Второе средство 62 разгрузки шарнирно установлено между второй опорой 28 и стойкой 5 или трансмиссионным механизмом 14. Как показано на фиг. 4, первое средство 61 разгрузки содержит, например, первый домкрат 53, тогда как второе средство 62 разгрузки содержит, например, второй домкрат 55.
Согласно предпочтительному отличительному признаку, машина 1 переходит из рабочей конфигурации фиг. 1 в конфигурацию маневрирования и/или транспортировки фиг. 3 при помощи соответствующих поворотов одного направления второго рабочего агрегата 11 относительно стойки 5 и стойки 5 относительно шасси 2. Не показанную конфигурацию маневрирования используют, например, чтобы первый и второй рабочие агрегаты 10 и 11 проходили над препятствием или валком. Она находится между рабочей конфигурацией и конфигурацией транспортировки.
Согласно примеру осуществления, первое шарнирное устройство 8 содержит шарнирную ось 63. В рабочем положении стойки 5 шарнирная ось 63 ориентирована по существу в направлении А движения. Во время работы стойка 5 может поворачиваться вверх и вниз вокруг шарнирной оси 63 таким образом, чтобы первый и второй рабочие агрегаты 10 и 11 перемещались вертикально, чтобы следовать профилю поля. Чтобы перейти из рабочей конфигурации в конфигурацию маневрирования и/или транспортировки, стойка 5 поворачивается вверх относительно шасси 2 вокруг шарнирной оси 63. Чтобы перейти из рабочей конфигурации в конфигурацию маневрирования и/или транспортировки, второй рабочий агрегат 11 поворачивается относительно стойки 5 в том же направлении, что и стойка относительно шасси 2, то есть вверх вокруг второй геометрической оси 13. При маневрах и/или при транспортировке эта кинематика позволяет поднять второй рабочий агрегат 11 над землей на довольно большую высоту. Кроме того, эта кинематика обеспечивает легкий переход машины 1 в конфигурацию маневрирования и/или транспортировки, даже если она находится на приподнятом грунте со стороны, где находится второй рабочий агрегат 11.
Согласно предпочтительному отличительному признаку, машина 1 переходит из рабочей конфигурации в конфигурацию транспортировки при помощи соответствующих поворотов одного направления
второго рабочего агрегата 11 относительно стойки на угол, составляющий от 90° до 180°, вокруг второй геометрической оси 13,
и стойки 5 относительно шасси 2 вокруг шарнирной оси 63.
Таким образом, в конфигурации транспортировки машины 1 рабочий механизм 9 занимает меньшую ширину. Когда стойка 5 сложена вверх относительно шасси 2, рабочий механизм 9 имеет меньшую ширину, близкую к половине общей рабочей ширины. Согласно примеру осуществления, показанному на фиг.3, стойка 5 расположена по существу вертикально или немного за пределами вертикали в конфигурации транспортировки машины 1. Второй рабочий агрегат 11 поворачивается вокруг второй геометрической оси 13 на угол, близкий к 180°. Этот поворот примерно на 180° облегчается смещением первого и второго рабочих агрегатов 10 и 11 между собой в направлении А движения. Это же смещение позволяет второму рабочему агрегату 11, повернутому примерно на 180°, располагаться сзади стойки 5 и вписываться в большей или меньшей степени в ее габарит, если смотреть сзади машины 1.
Согласно другому предпочтительному отличительному признаку, машина 1 переходит из рабочей конфигурации в конфигурацию транспортировки
при помощи поворота вверх второго рабочего агрегата 11 относительно стойки 5 в рабочем положении вокруг второй геометрической оси 13 на угол, составляющий от 90° до 180°,
затем при помощи поворота вверх стойки 5 относительно шасси 2.
Таким образом, переход из рабочей конфигурации в конфигурацию транспортировки предусматривает первую фазу, во время которой первый рабочий агрегат 10 остается на земле. Во время этой первой фазы второй рабочий агрегат 11 поворачивается вокруг второй геометрической оси 13. Согласно примеру осуществления, угол этого поворота имеет значение, близкое к 180°. При этом второй рабочий агрегат 11 приходит в положение, которое он занимает в конечном итоге относительно стойки 5 в конфигурации транспортировки машины 1. Таким образом, второй рабочий агрегат 11 может поворачиваться, но машина 1 не теряет при этом устойчивости, так как первый рабочий агрегат 10 выполняет функцию опоры на землю. Только на втором этапе стойка 5 поворачивается вверх вокруг шарнирной оси 63. Дополнительная устойчивость, обеспечиваемая этой последовательностью движений, позволяет использовать рабочие агрегаты 10 и 11 большой ширины и/или рабочие агрегаты 10 и 11, которые во время работы имеют большой боковой вынос относительно самоходного транспортного средства 3. Эта последовательность позволяет также уменьшить мощность, которую должна обеспечивать машина 1 или самоходное транспортное средство 3, чтобы управлять приводами, необходимыми для перехода из рабочей конфигурации в конфигурацию транспортировки.
Согласно примеру осуществления, заявленная машина 1 может содержать, кроме стойки 5 и двух рабочих агрегатов 10 и 11, расположенных на одной стороне шасси 2, вторую стойку 5', на которой установлены два других рабочих агрегата 10' и 11', расположенные на другой стороне шасси 2. Такая конструкция обеспечивает большую рабочую ширину, например, составляющую от десяти до пятнадцати метров.
Разумеется, изобретение не ограничивается описанным и показанным на прилагаемых фигурах примером осуществления. В него можно вносить изменения, в частности, что касается состава, расположения или количества различных элементов, при помощи различных комбинаций вышеупомянутых признаков или посредством замены технических эквивалентов, не выходя при этом за пределы объема защиты изобретения.
Реферат
Изобретение относится к сельскохозяйственному машиностроению. Сельскохозяйственная машина включает шасси, первый и второй агрегаты. На шасси установлены стойка, имеющая первый и второй концы и выполненная с возможностью занимать боковое положение относительно шасси. Первый агрегат соединен со стойкой и расположен в боковом направлении между ее первым и вторым концами. Второй агрегат соединен со стойкой и расположен в боковом направлении за пределами второго конца. Устройство, соединяющее второй агрегат со стойкой вблизи ее второго конца, позволяет ему поворачиваться относительно стойки вокруг находящейся вблизи второго конца второй продольной оси. Приводящий в действие орудия первого и второго агрегатов механизм установлен на стойке вблизи ее второго конца. Соединяющее первый агрегат со стойкой вблизи ее второго конца устройство позволяет первому агрегату поворачиваться во время работы вокруг первой продольной оси и содержит ориентированную вверх во время работы ось, вокруг которой могут совместно поворачиваться трансмиссионный механизм и один из первого и второго рабочих агрегатов. Сельскохозяйственная машина позволяет убирать рабочий агрегат перед препятствием для избежания повреждений. 15 з.п. ф-лы, 7 ил.
Формула
Документы, цитированные в отчёте о поиске
Самоходный зерноуборочный комбайн
Комментарии