Уборочный комплекс - RU2569566C2
Код документа: RU2569566C2
Чертежи
Описание
Область техники, к которой относится изобретение
Изобретение относится к уборочному комплексу в соответствии с ограничительной частью пункта 1 формулы изобретения, состоящему по существу из самоходной уборочной машины и оснащенного приводной установкой передвижного сборного контейнера, который выполнен с возможностью позиционирования относительно уборочной машины и перемещения параллельно ей и к которому при работе по уборке через снабженную выпускным патрубком транспортирующую трубу непосредственно или не непосредственно может подаваться убранная масса от уборочной машины, причем сборный контейнер снабжен с устройством для равномерной загрузки сборного контейнера.
Далее, изобретение относится к способу опорожнения зернового бункера самоходного зерноуборочного комбайна от накопленной в нем убранной массы в оснащенный приводной установкой передвижной сборный контейнер в соответствии с ограничительной частью пункта 15 формулы изобретения, при котором сборный контейнер позиционируют относительно зерноуборочного комбайна и перемещают параллельно ему, при этом одновременно с работой по уборке убранную массу через снабженную выпускным патрубком транспортирующую трубу непосредственно или не непосредственно подают к сборному контейнеру.
Уровень техники
В начале технической разработки уборочных машин, выполненных в виде зерноуборочных комбайнов или полевых измельчителей, эти машины, как правило, не оснащались собственным приводом. Они выполнялись прицепными к сельскохозяйственному трактору и приводились от его вала отбора мощности. В наше время почти все комбайны, используемые для уборки зерновых культур, рапса или кукурузы, выполняются в виде самоходных уборочных машин. Высокопроизводительные полевые измельчители, которые используются в крупных хозяйствах и на арендных предприятиях, являются самоходными уборочными машинами и оснащены собственной приводной установкой.
В сельском хозяйстве для уборки зерновых культур и рапса в течение года имеется в распоряжении лишь относительно короткий период времени, а именно тогда, когда стебельчатая масса достигла определенной степени зрелости для получения хороших результатов уборки. К тому же для экономии затрат на сушку, которые значительно влияют на себестоимость, желательно, чтобы по возможности не превышалось определенное влагосодержание убранной массы. Соответственно, для уборки используются высокоэффективные уборочные машины, например зерноуборочные комбайны с высокой производительностью обработки площади, уборочный навесной аппарат которых выполнен в виде жатвенного аппарата для уборки зерновых или рапса или в виде кукурузной приставки и имеет большую рабочую ширину.
Это увеличение рабочей ширины уборочного навесного аппарата и соответствующее повышение производительности молотильного устройства приводит к тому, что в зерновом бункере накапливается большое количество убранной массы за короткие интервалы времени. При этом должна была значительно возрасти также приемная способность зернового бункера, чтобы не нужно было часто прерывать процесс уборки и подгонять один из множества находящихся на поле сборных контейнеров для перегрузки в него убранной массы. С одной стороны, соответствующее повышение приемной способности зернового бункера и накопление максимального количества убранной массы привело бы к значительному увеличению веса такой самоходной уборочной машины. Недостаток увеличения веса заключается в уплотнении почвы при передвижении зерноуборочного комбайна на поле, что неблагоприятно влияет на рыхлость почвы, поскольку в этих сильно уплотненных колеях жизнедеятельность может развиваться только в значительно сниженном объеме, так как уплотнение почвы приводит к существенному снижению воздухо- и водопроводимости. С другой стороны, если не увеличивать приемную способность зернового бункера, интервалы для опорожнения бункера в сборный контейнер стали бы значительно короче, так что процесс уборки нужно было бы прерывать очень часто, что в сумме давало бы относительно большое время простоев.
По этим причинам в высокопроизводительных зерноуборочных комбайнах с увеличенной рабочей шириной уборочного навесного аппарата перегрузка убранной массы из зернового бункера в сборный контейнер, то есть опорожнение бункера, производится в ходе процесса уборки. Это означает, что в фазе, когда зерновой бункер зерноуборочного комбайна достиг своего максимального уровня заполнения, сборный контейнер, который также выполнен самоходным или может протягиваться тягачом, занимает рядом с комбайном положение, в котором убранная масса подается в сборный контейнер через разгрузочную трубу, снабженную выпускным патрубком.
В этом отношении известны системы, при которых водитель зерноуборочного комбайна не только отслеживает все функции комбайна и предпринимает необходимые действия по регулировке; из своей кабины он вызывает ближайший к уборочной машине сборный контейнер и управляет им таким образом, чтобы сборный контейнер двигался параллельно уборочной машине. При этом скорость движения сборного контейнера скоординирована со скоростью уборочной машины. После того, как сборный контейнер занимает положение относительно комбайна, производится перегрузка убранной массы или опорожнение бункера с помощью шнека, расположенного в разгрузочной трубе, развернутой соответствующим образом.
В ходе подачи убранной массы к сборному контейнеру процесс перегрузки должен постоянно отслеживаться во избежание зерновых потерь в ходе процесса. Так, например, может случиться, что выпускной патрубок разгрузочной трубы занимает такое положение относительно сборного контейнера, в котором фракции убранной массы падают рядом со сборным контейнером. Эта проблема может создаваться также тогда, когда из-за погодных условий сильный боковой ветер уносит зерна из потока убранной массы и бросает их рядом со сборным контейнером. Кроме того, по возможности должен использоваться полностью весь объем сборного контейнера, то есть убранная масса должна быть оптимально распределена в сборном контейнере. Далее, необходимо останавливать заполнение сборного контейнера, когда достигнут высокий уровень заполнения в его отдельных областях, иначе часть убранной массы попадет на поле в конце процесса заполнения или при последующем отъезде сборного контейнера.
При этом важную роль играет то обстоятельство, что водитель, например, при уборке зерновых, должен концентрировать свое внимание, в первую очередь, на процессе жатвы и обмолота, то есть важную роль играет наблюдение за уборочным навесным аппаратом. Однако если он при этом должен еще отслеживать положение сборного контейнера и процесс опорожнения бункера, то он слишком сильно отвлекается от своей основной задачи. К тому же часто видимость сборного контейнера бывает ограничена сильной запыленностью в ходе процессов обмолота и опорожнения бункера, так что для водителя невозможно стопроцентно отслеживать подачу убранной массы в сборный контейнер.
Указанные проблемы имеют место как для оснащенной молотильным устройством уборочной машины, так и для самоходного полевого или кукурузного измельчителя, при этом в последних машинах убранная масса не накапливается промежуточным образом в бункере уборочной машины, а непосредственно выбрасывается через разгрузочную трубу в направлении сборного контейнера. В этом случае также важно точное позиционирование сборного контейнера, который должен непрерывно двигаться за уборочной машиной или рядом с ней.
Уборочный комплекс указанного типа с самоходной уборочной машиной и оснащенным приводной установкой передвижным сборным контейнером в соответствии с ограничительной частью пункта 1 формулы изобретения известен из патентного документа ЕР 2245916 А1. При этом сборный контейнер, протягиваемый тягачом параллельно уборочной машине, должен равномерно загружаться за счет того, что положение сборного контейнера относительно выпускного патрубка разгрузочной трубы изменяется по направлению движения. Это изменение положения сборного контейнера относительно уборочной машины, а также соблюдение параллельной колеи движения должно достигаться с помощью системы GPS (Global Positioning System, GPS - глобальная система навигации и определения положения). Далее, выпускной патрубок выполнен с возможностью поворота относительно разгрузочной трубы, и его положение регулируется автоматической системой управления таким образом, что выходящая убранная масса поступает в сборный контейнер при соблюдении условия отсутствия зерновых потерь.
Кроме того, из патентного документа ЕР 1219153 А2 известна система, состоящая из самоходной уборочной машины и передвижного сборного контейнера, в которой относительные положения уборочной машины и сборного контейнера также должны изменяться в зависимости от мониторинга с помощью системы GPS и радиосигналов таким образом, что сборный контейнер загружается полностью в соответствии с его вместимостью.
Раскрытие изобретения
Задачей изобретения является усовершенствование уборочного комплекса указанного вида таким образом, что за счет использования системы отслеживания функций устраняется потеря части убранной массы и обеспечивается полное заполнение соответствующего сборного контейнера. Кроме того, подача убранной массы в сборный контейнер должна обеспечиваться при всех условиях уборки.
Решение поставленной задачи обеспечивается, исходя из ограничительной части пункта 1 формулы изобретения, за счет указанных в нем отличительных признаков. Согласно отличительной части пункта 1 формулы изобретения сборный контейнер в ходе подачи убранной массы должен перемещаться в постоянном положении относительно уборочной машины с помощью устройства управления, при этом сборный контейнер должен содержать устройство заполнения, с помощью которого достигается равномерное распределение убранной массы в сборном контейнере.
Следовательно, функция распределения убранной массы внутри сборного контейнера выполняется только посредством устройства заполнения по изобретению, которым снабжен сборный контейнер. При этом перемещаемый параллельно уборочной машине сборный контейнер сохраняет постоянное безопасное расстояние относительно уборочной машины и перемещается вперед со скоростью, соответствующей скорости движения уборочной машины. В результате к началу подачи убранной массы из уборочной машины соответствующий выпускной патрубок разгрузочной трубы занимает фиксированное положение по отношению к входу устройства заполнения. Перед этим сборный контейнер подъезжает из своего положения ожидания к уборочной машине с высокой скоростью и затем при параллельном движении, как было указано, настраивает свою скорость движения в соответствии с уборочной машиной, как только выпускной патрубок занимает предусмотренное положение. За счет этого могут устраняться проблемы как при подчинении сборного контейнера уборочной машине, так и при равномерном заполнении сборного контейнера.
В отличие от этого в решениях уровня техники по указанным документам ЕР 2245916 А1 и ЕР 1219153 А2 производится непрерывное изменение положения сборного контейнера относительно уборочной машины для достижения равномерного распределения убранной массы в сборном контейнере. При этом не исключен риск того, что в определенных областях сборного контейнера будет превышен уровень заполнения, так что часть убранной массы попадет на поле и будет потеряна.
Согласно предпочтительному примеру осуществления уборочная машина должна быть выполнена в виде зерноуборочного комбайна, причем выполненная в виде разгрузочной трубы зернового бункера транспортирующая труба отходит от зернового бункера зерноуборочного комбайна. При этом уровень заполнения зернового бункера комбайна, служащего промежуточным хранилищем, непрерывно отслеживается, и перед достижением максимального уровня заполнения автоматически вызывается ближайший к комбайну сборный контейнер. После этого выполненным в виде сельскохозяйственного трактора тягачом сборный контейнер приводится в положение для последующего опорожнения бункера от убранной массы.
Само собой разумеется, что подача соответствующего сборного контейнера к работающему зерноуборочному комбайну может вначале производиться с ручным управлением, однако затем устройство управления должно привести сборный контейнер в его предусмотренное для процесса опорожнения бункера положение и удерживать это позиционирование относительно движущегося комбайна.
Для этой цели, а также при определенных обстоятельствах для автоматического подъезда сборного контейнера к комбайну как уборочная машина, выполненная в виде зерноуборочного комбайна, так и приводная установка передвижного сборного контейнера могут быть снабжены навигационной системой, с помощью которой они во время перегрузки убранной массы поддерживаются в постоянном положении относительно друг друга. При этом предпочтительно речь идет о решении на основе сигналов GPS и о системах радиосвязи, посредством которых регулируется так называемое «электронное дышло прицепа». По соображениям безопасности может быть предусмотрена дополнительная система, которая поддерживает позиционирование транспортных средств относительно друг друга при сбоях в передаче сигналов GPS или радиосвязи. Так, например, с помощью датчиков расстояния на сборном контейнере или на уборочной машине, которые срабатывают при сбоях в нормальной системе управления, может производиться дополнительное наблюдение за положениями обоих транспортных средств и корректироваться положение сборного контейнера. Эти датчики расстояния производили бы координацию скорости движения и корректировку рулевого угла поворота на приводной установке сборного контейнера.
Далее, расположенный на зерноуборочном комбайне уборочный навесной аппарат должен иметь такой поперечный габарит, что выступает с обеих сторон за зерноуборочный комбайн, причем в этом случае сборный контейнер в ходе транспортирования убранной массы через разгрузочную трубу зернового бункера занимает положение по существу в пределах габарита уборочного навесного аппарата. Такая возможность имеется в комбайнах, уборочный навесной аппарат которых, то есть жатвенный аппарат для уборки зерновых или рапса, или кукурузная приставка, значительно выступает за остальную ширину комбайна. В комбайнах разгрузочная труба зернового бункера обычно бывает предусмотрена на левой стороне, если смотреть по направлению движения. Соответственно, в процессе опорожнения бункера сборный контейнер, предпочтительно протягиваемый сельскохозяйственным трактором, движется в пределах этого бокового габарита уборочного навесного аппарата. Однако бывают определенные условия уборки, в которых целесообразно, чтобы сборный контейнер двигался в пределах габарита уборочного навесного аппарата. Так, например, если при начальном проходе, то есть при скашивании первой полосы уже требуется опорожнение бункера, сельскохозяйственный трактор и сборный контейнер, когда они движутся за пределами габарита уборочного навесного аппарата, должны были бы двигаться либо по еще неубранной растительности, либо по соседнему полю. Это вызвало бы появление ненужной колеи и потери урожая. В противоположность этому в соответствии с изобретением устраняются повреждения как еще не убранной культуры, так и растительности на смежном участке, так как протягиваемый тягачом сборный контейнер движется по полосе, уже убранной комбайном. Подобные обстоятельства создаются, когда уборка относительно больших участков поля производится только на одной кромке культуры, так что разгрузочная труба зернового бункера при каждом втором проходе находится на стороне культуры. Кроме того, при обработке больших участков желательно избегать длинных проходов по краю поля. Это приводит к тому, что требуется делать повторные начальные проходы в культуре, при которых также нет полос для движения сборного контейнера, если он не может продвигаться в пределах габарита уборочного навесного аппарата.
В настоящее время не существует возможностей какого-то особенного использования соломы и половы, получаемых в качестве побочного продукта в процессе уборки, как корм или подстилка для скота. Поэтому почти все комбайны оснащаются расположенными на выходе для соломы и половы соломорезками, которые обеспечивают достаточное измельчение и разбрасывание этих фракций для того, чтобы при последующей обработке почвы они могли равномерно заделываться в верхний слой почвы для получения ее оптимальной рыхлости. Согласно изобретению зерноуборочный комбайн должен содержать соломорезку с регулируемым направляющим устройством для настройки ширины разбрасывания соломы и половы, причем направляющее устройство на основании передаваемого от сборного контейнера сигнала может автоматически перемещаться в положение, в котором эта ширина с одной стороны уменьшается таким образом, что лежит за пределами полосы движения сборного контейнера. Таким образом, соответствующие направляющие устройства соломорезки, которые предпочтительно регулируются гидравлическими средствами, обеспечивают асимметричное разбрасывание измельченной соломы и половы. Это регулирование направляющего устройства соломорезки, предпочтительно осуществляемое автоматически, используется в том случае, когда передвижной сборный контейнер движется в положении рядом с комбайном. После опорожнения зернового бункера и отъезда сборного контейнера направляющее устройство перенастраивается на свою нормальную функцию, так что солома и полова снова разбрасываются на всю рабочую ширину комбайна. Таким путем предотвращаются попадание измельченной массы на транспортный контейнер и образование скоплений или валков измельченной массы. Эти скопления или валки могут создавать проблемы при последующей обработке почвы и образовывать в почве соломенные гнезда, которые мешают созреванию почвы. Кроме того, без этой регулировки направляющего устройства соломорезки воздух в области сборного контейнера был бы значительно засорен соломенной трухой и пылью, что отрицательно влияло бы на процесс опорожнения бункера и при неблагоприятных ветровых условиях могло бы даже загрязнять убранную массу внутри сборного контейнера.
Согласно предпочтительному примеру осуществления изобретения устройство заполнения сборного контейнера должно содержать, по меньшей мере, один продольный транспортер, действующий в продольном направлении сборного контейнера. Этот продольный транспортер транспортирует подаваемую в сборный контейнер убранную массу таким образом, что обеспечивает возможность равномерного распределения убранной массы в сборном контейнере до достижения максимального заполнения его объема. При этом продольный транспортер может быть выполнен в виде, по меньшей мере, одного транспортирующего шнека или в виде скребкового транспортера. Однако это могут быть и другие виды продольных контейнеров, которые непрерывно или периодически производят распределение убранной массы.
Далее, продольный транспортер может быть расположен в транспортирующем лотке, причем на транспортирующем лотке имеются выходные области, выполненные регулируемыми с различными выходными поперечными сечениями. Эти регулируемые поперечные сечения или альтернативные им направляющие элементы обеспечивают равномерное распределение убранной массы, причем они могут регулироваться с помощью измерительных устройств, которые отслеживают уровень заполнения сборного контейнера, или в зависимости от других параметров. Так, например, воздействие на функцию регулировки может оказываться в том случае, когда опорожнение бункера производится на косогоре, для того, чтобы оно не могло приводить к односторонней загрузке сборного контейнера.
При этом подача убранной массы через выпускной патрубок разгрузочной трубы зернового бункера может осуществляться в середину продольной протяженности сборного контейнера. В этом случае устройство заполнения содержит, по меньшей мере, два продольных транспортера, действующих в противоположных направлениях транспортирования. Альтернативно подача убранной массы может осуществляться также на одном конце сборного контейнера, причем в этом случае предусмотрен, по меньшей мере, один продольный контейнер, действующий в одном направлении подачи.
Согласно следующему примеру осуществления изобретения сборный контейнер должен быть снабжен на одном из своих концов загрузочной воронкой, из которой выходит, по меньшей мере, один продольный транспортер. Эта загрузочная воронка может, например, выступать в сторону комбайна от сборного контейнера, предпочтительно имеющего прямоугольное днище. Во всех указанных видах устройства заполнения могут быть выполнены в качестве отдельных компонентов, которые могут быть установлены на сборном контейнере, так что передвижной сборный контейнер после простого демонтажа устройства заполнения может использоваться для других сельскохозяйственных транспортных работ.
Далее, имеется возможность предусмотреть для сборного контейнера самоходное шасси, предпочтительно тягач, с задним пространством для навески орудий или задней грузовой платформой. На этом заднем пространстве или на грузовой платформе должен быть расположен промежуточный накопитель, который заполняется через разгрузочную трубу зернового бункера комбайна. От этого промежуточного накопителя отходит промежуточный транспортер, сообщающийся с входной областью расположенного в сборном контейнере продольного транспортера. При этом предпочтительно промежуточный транспортер направляется с возможностью поворота на промежуточном накопителе, так что даже в случае рулевых поворотов самоходного шасси выпуск промежуточного транспортера может сохранять постоянное положение на сборном контейнере.
Кроме того, в верхней крайней области сборного контейнера должны быть расположены датчики для отслеживания уровня заполнения, с помощью которых может управляться продольный транспортер. При этом целесообразно, чтобы эти датчики относились к различным секторам сборного контейнера. Тогда на основе отдельных данных, передаваемых от датчиков на центральное устройство, могут регулироваться продольный транспортер или описанные выше устройства для изменения выходных поперечных сечений в транспортирующем лотке или соответствующие направляющие устройства. Таким образом, достигается равномерное заполнение сборного контейнера до его максимального уровня заполнения.
Дополнительно к описанным устройствам на разгрузочной трубе уборочной машины или на ее выпускном патрубке должна быть расположена камера, связанная с монитором, предусмотренным в кабине уборочной машины. Помимо предусмотренного автоматического выполнения функций наблюдения водитель уборочной машины с помощью монитора может осуществлять функцию контроля, чтобы определять возникновение проблем и разрешать их посредством ручного вмешательства.
Кроме того, уборочный комплекс по изобретению может быть выполнен таким образом, что в области загрузки продольного транспортера на сборном контейнере расположен отслеживающий подачу убранной массы из выпускного патрубка ультразвуковой датчик, который связан с монитором или с навигационной системой, управляющей положением сборного контейнера. Этот прибор должен быть предусмотрен альтернативно описанной камере или в комбинации с ней и помимо позиционирования сборного контейнера относительно комбайна с помощью навигационной системы может выполнять дополнительную функцию наблюдения с автоматической корректировкой или направлением водителю уборочной машины требования дополнительной корректировки.
И, наконец, изобретение относится также к способу опорожнения зернового бункера самоходного зерноуборочного комбайна от накопленной в нем убранной массы в оснащенный приводной установкой передвижной сборный контейнер, при котором сборный контейнер позиционируют относительно зерноуборочного комбайна и перемещают параллельно ему, при этом одновременно с работой по уборке убранную массу через снабженную выпускным патрубком транспортирующую трубу непосредственно или не непосредственно подают к сборному контейнеру. При этом сборный контейнер для разгрузки убранной массы должен перемещаться с помощью устройства управления в постоянном положении относительно зерноуборочного комбайна за уборочным навесным аппаратом или рядом с уборочным навесным аппаратом, причем выпускной патрубок постоянно направлен к входной области предусмотренного в сборном контейнере продольного транспортера.
Таким образом, создан способ, с помощью которого могут достигаться преимущества, описанные в пунктах формулы изобретения, относящихся к уборочному комплексу. Обеспечивается возможность производить уборку зерновых, кукурузы рапса или других стручковых культур с меньшей численностью персонала, так как водитель комбайна может сконцентрироваться по существу на обслуживании комбайна, в то время как остальной процесс опорожнения зернового бункера выполняется в основном автоматически. Нет необходимости в том, чтобы другие работники заменяли заполненный сборный контейнер пустым и отгоняли заполненный сборный контейнер. В рамках данного способа производятся также изменение ширины разбрасывания установленной на комбайне соломорезки и отслеживание с помощью датчиков равномерного и максимального заполнения сборного контейнера.
Далее, согласно способу по изобретению предусмотрено определение текущего положения зерноуборочного комбайна и сборного контейнера с помощью одной или двух имеющих связь друг с другом навигационных систем, причем альтернативно этому по линии радиосвязи между зерноуборочным комбайном и сборным контейнером может выравниваться положение сборного контейнера. При этом в решении по развитию способа должна обеспечиваться дополнительная функция отслеживания, для чего предусмотрены датчики расстояния, которые отслеживают текущее расстояние между зерноуборочным комбайном и сборным контейнером и при чрезмерном сближении или превышении расстояния запускают процесс корректировки рулевого угла поворота на сборном контейнере или на его приводной установке.
Изобретение не ограничивается совокупностью признаков пункта 1 формулы изобретения и зависимых от него пунктов, а также совокупностью признаков независимого пункта 15 и зависимых от него пунктов. Помимо этого имеются возможности комбинации отдельных признаков, следующих из пунктов формулы изобретения, последующего описания примеров осуществления и непосредственно из чертежей. Так, в рамках изобретения возможно расположение продольного транспортера в области днища сборного контейнера, например, в виде донного транспортера или, по меньшей мере, в виде расположенного на днище транспортирующего шнека.
Краткий перечень чертежей
Другие особенности изобретения будут ясны из последующего описания шести примеров осуществления уборочного комплекса и пяти примеров осуществления сборного контейнера по изобретению со ссылками на прилагаемые чертежи. На чертежах:
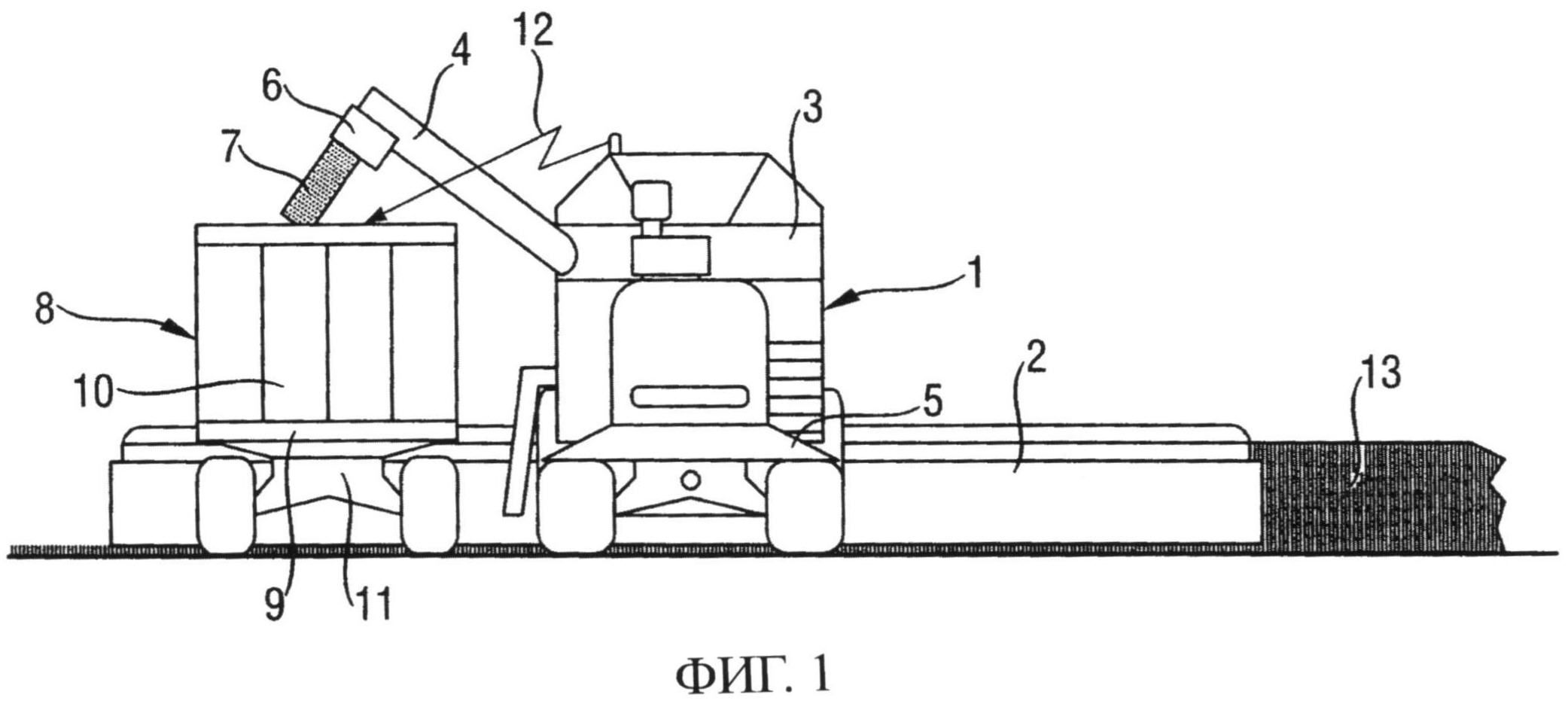
фиг.1 изображает на виде сзади самоходный зерноуборочный комбайн и расположенный рядом с ним передвижной сборный контейнер,
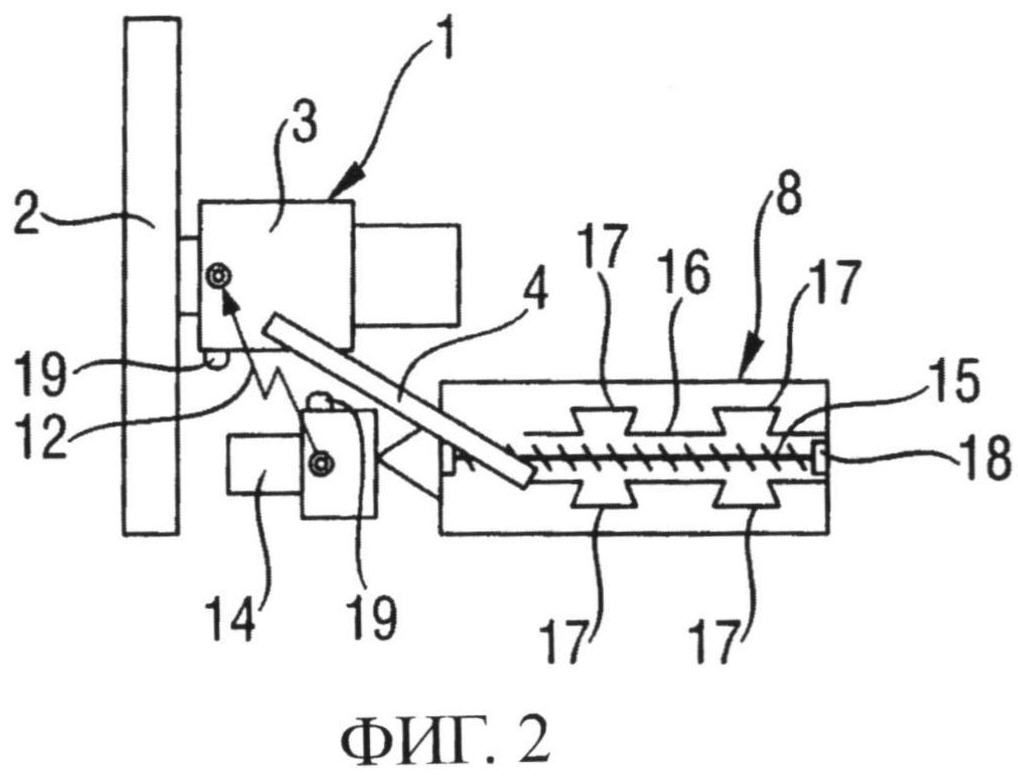
фиг.2 схематично изображает в уменьшенном виде сверху уборочный комплекс по фиг.1,
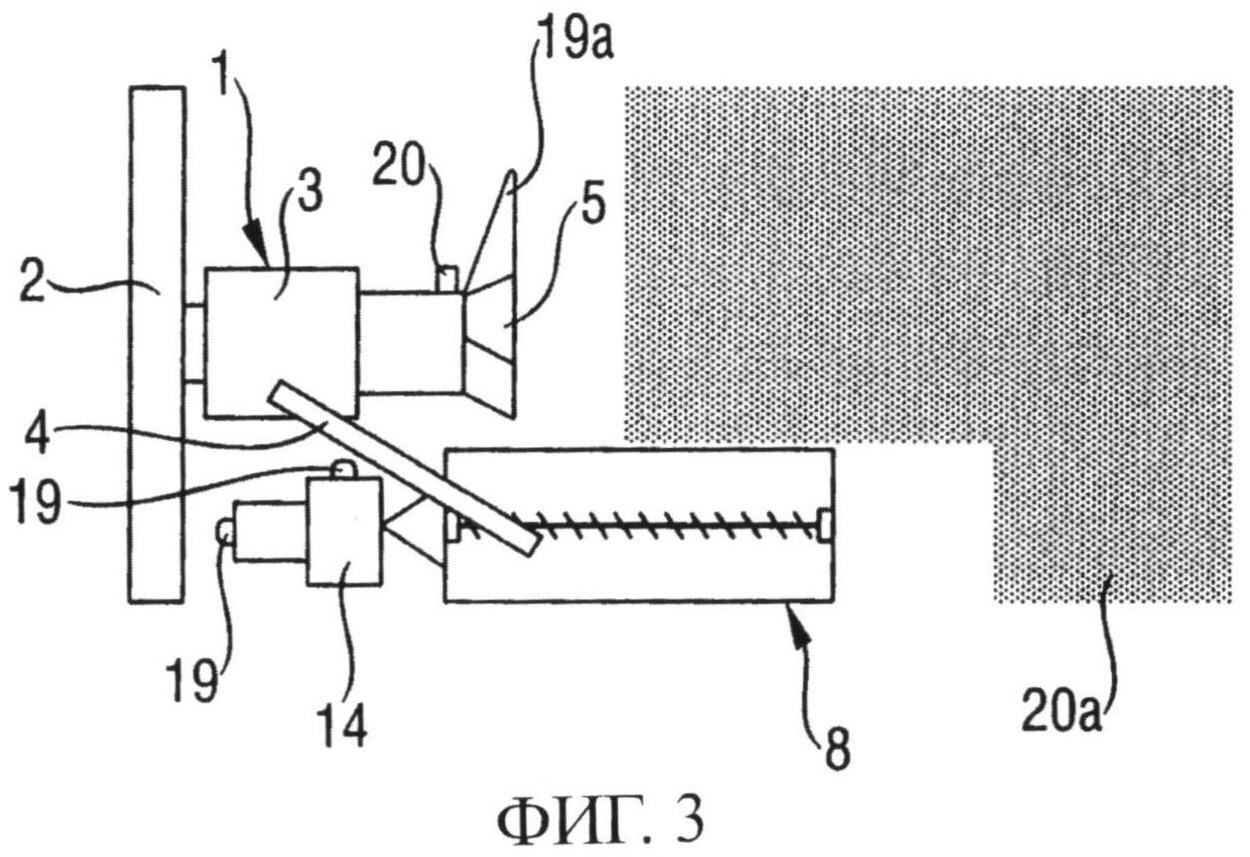
фиг.3 схематично изображает на виде сверху уборочный комплекс, в котором самоходный зерноуборочный комбайн снабжен соломорезкой, укладывающей измельченную массу радом с колеей движения сборного контейнера,
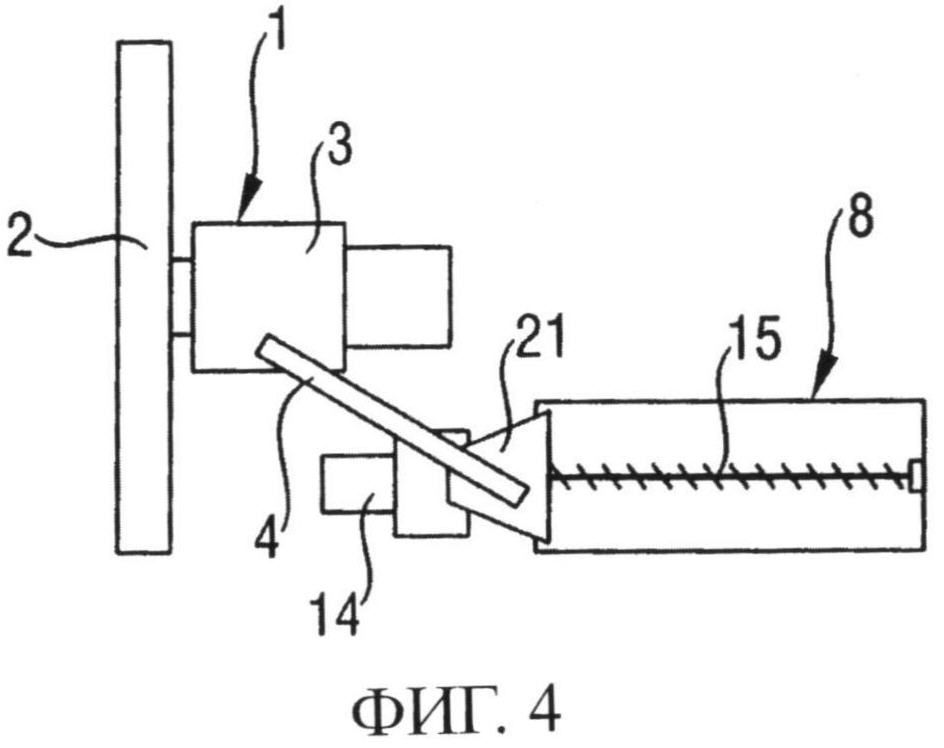
фиг.4 схематично изображает на виде сверху уборочный комплекс, в котором убранная масса подается в переднюю загрузочную воронку сборного контейнера,
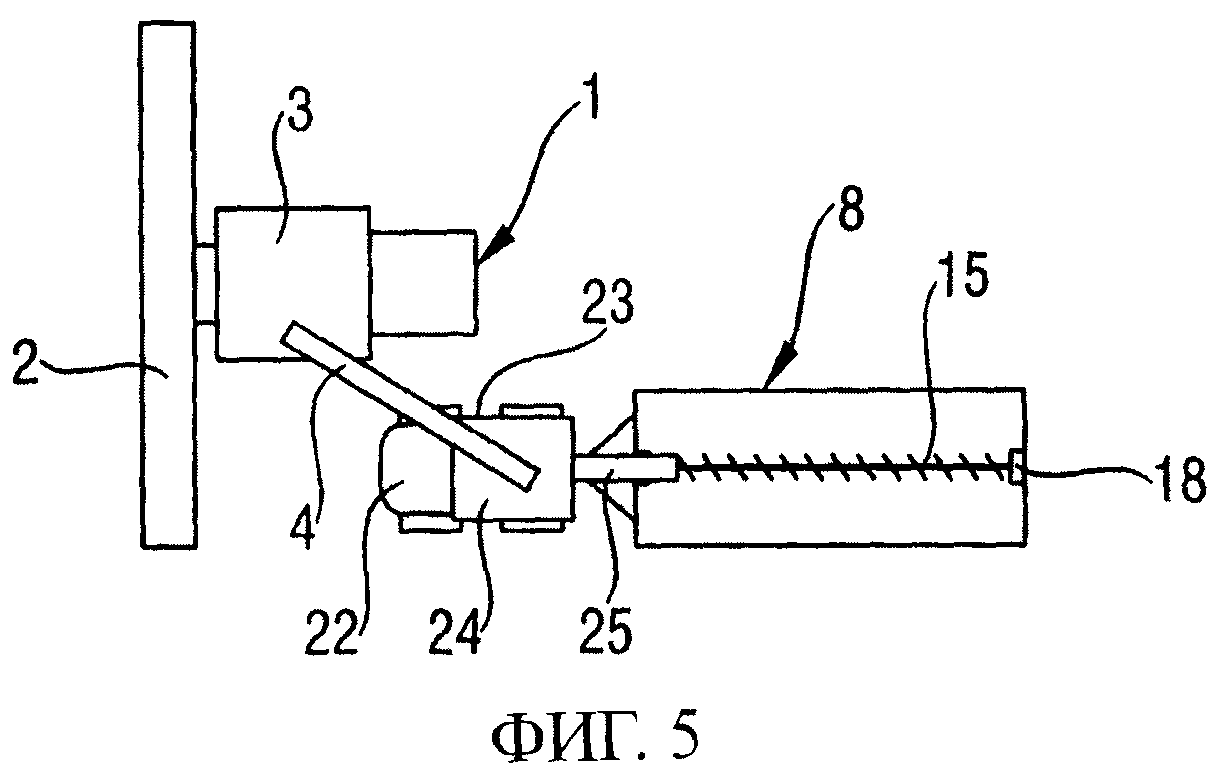
фиг.5 схематично изображает на виде сверху уборочный комплекс, в котором убранная масса подается в промежуточный накопитель, предусмотренный на грузовой платформе тягача, протягивающего сборный контейнер,
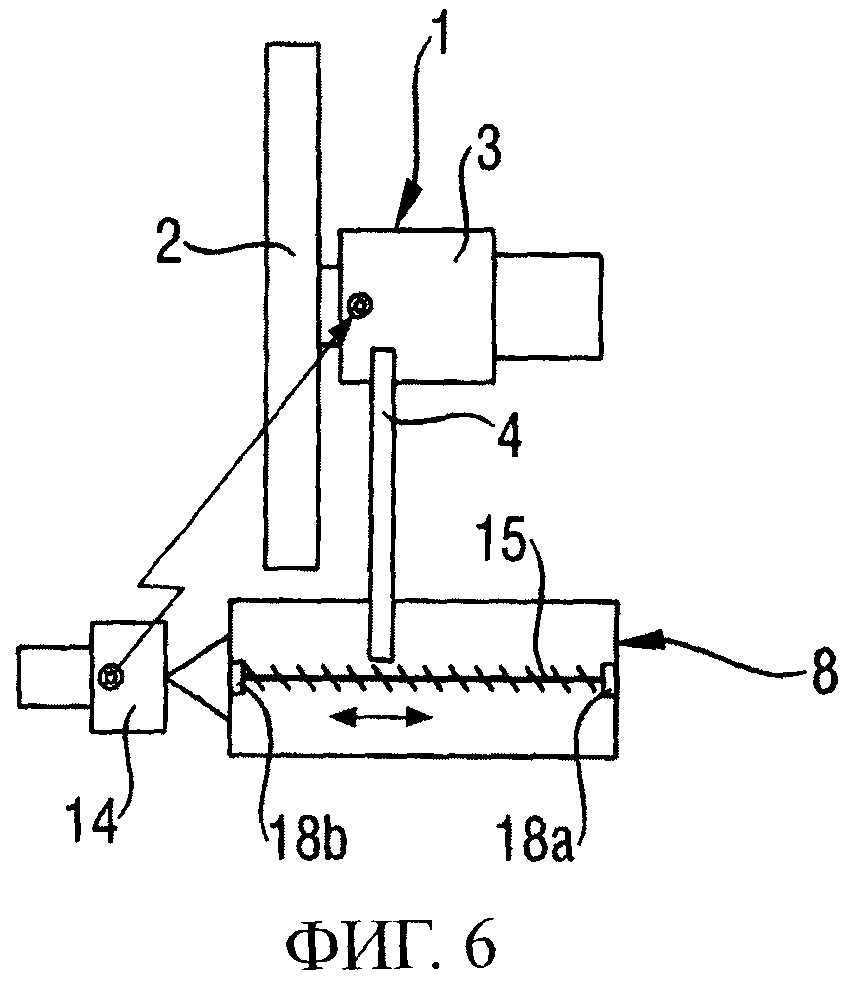
фиг.6 схематично изображает на виде сверху уборочный комплекс, в котором сборный контейнер движется параллельно зерноуборочному комбайну за пределами габарита уборочного навесного аппарата,
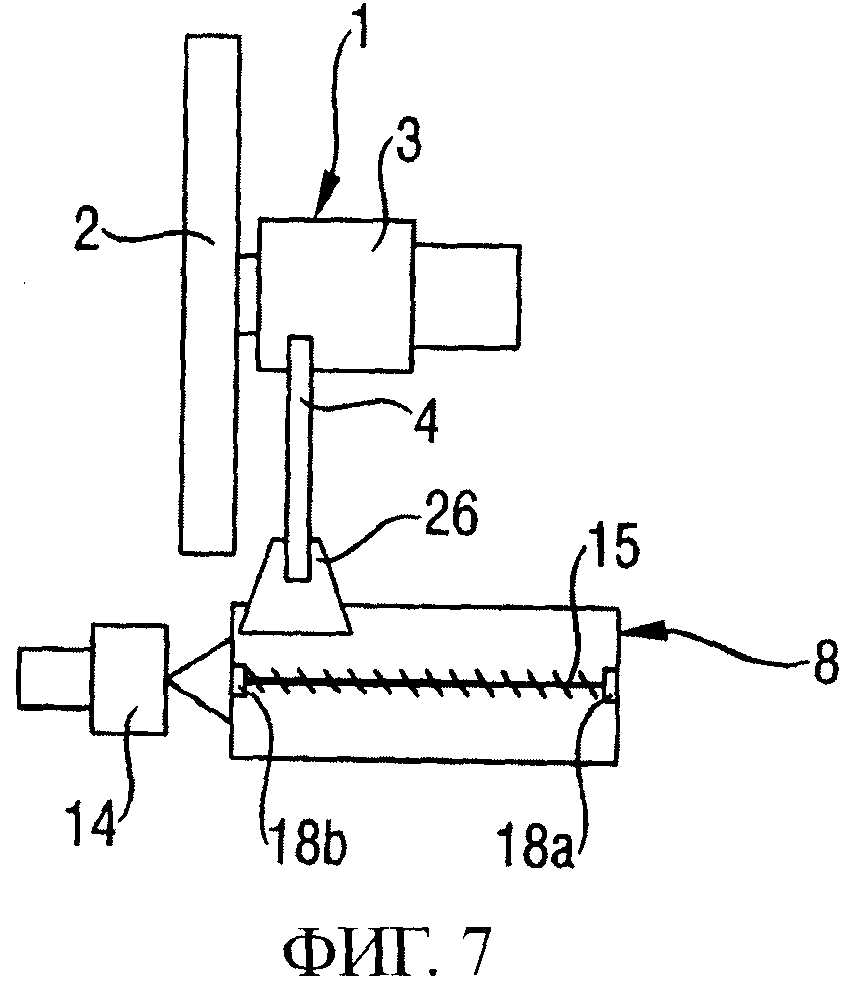
фиг.7 схематично изображает на виде сверху уборочный комплекс, в котором сборный контейнер также движется параллельно зерноуборочному комбайну за пределами габарита уборочного навесного аппарата, причем сборный контейнер оснащен боковой загрузочной воронкой,
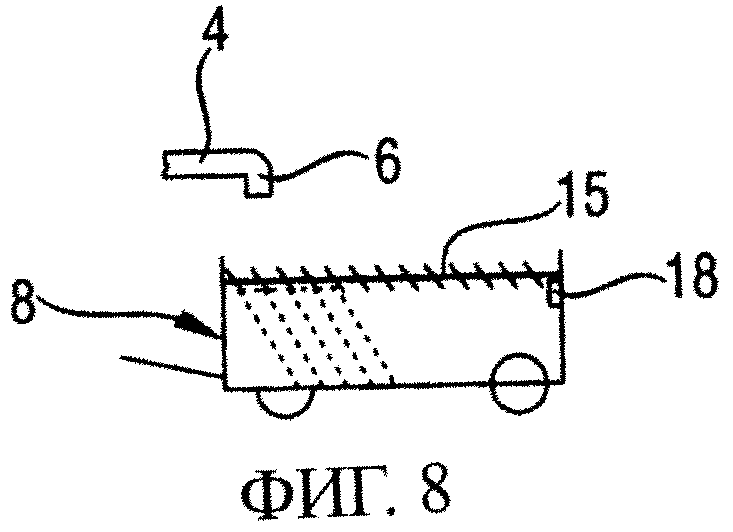
фиг.8 схематично изображает на виде сбоку оснащенный транспортирующим шнеком сборный контейнер с подачей убранной массы к переднему концу сборного контейнера,
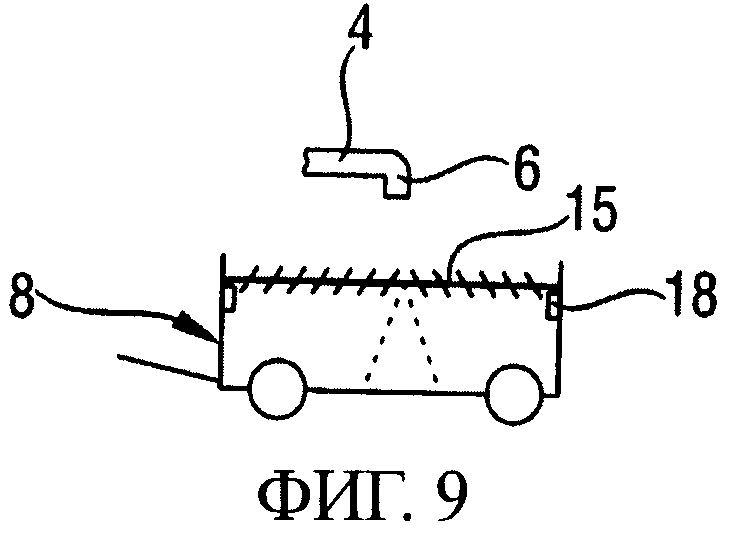
фиг.9 схематично изображает на виде сбоку сборный контейнер, в котором убранная масса подается к устройству заполнения в средней области сборного контейнера,
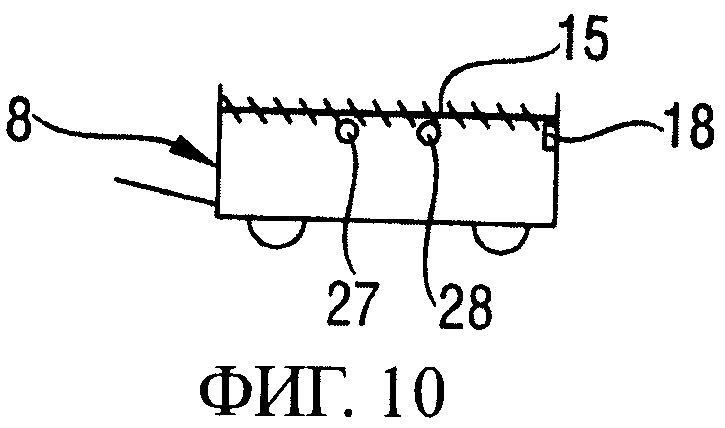
фиг.10 схематично изображает на виде сбоку сборный контейнер с датчиками для наблюдения за уровнем заполнения сборного контейнера,
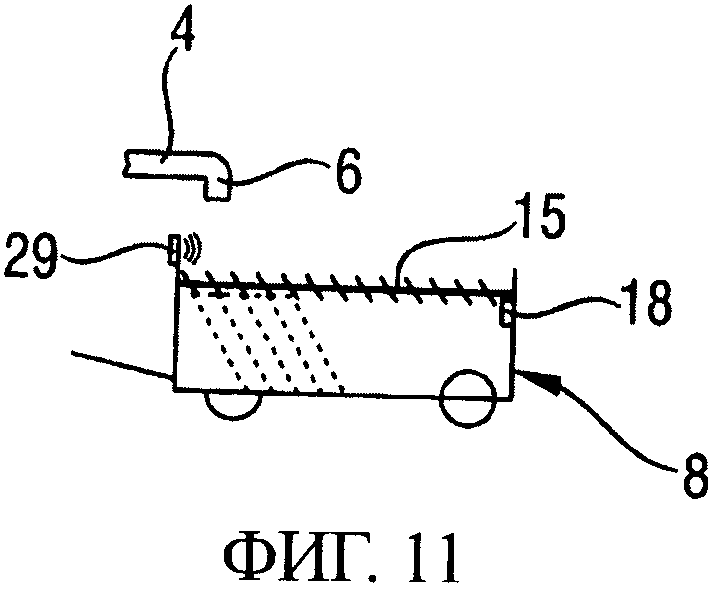
фиг.11 схематично изображает на виде сбоку сборный контейнер, в котором подача убранной массы отслеживается ультразвуковым датчиком,
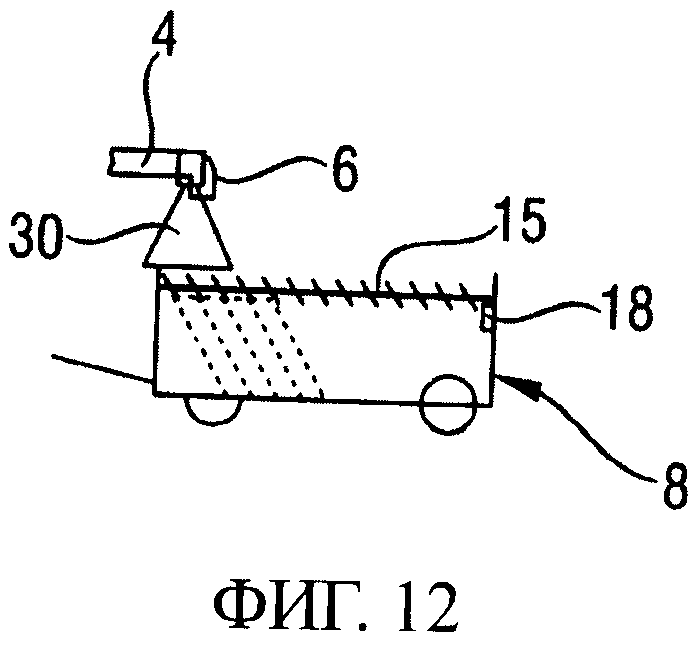
фиг.12 схематично изображает на виде сбоку сборный контейнер, в котором подача убранной массы отслеживается камерой,
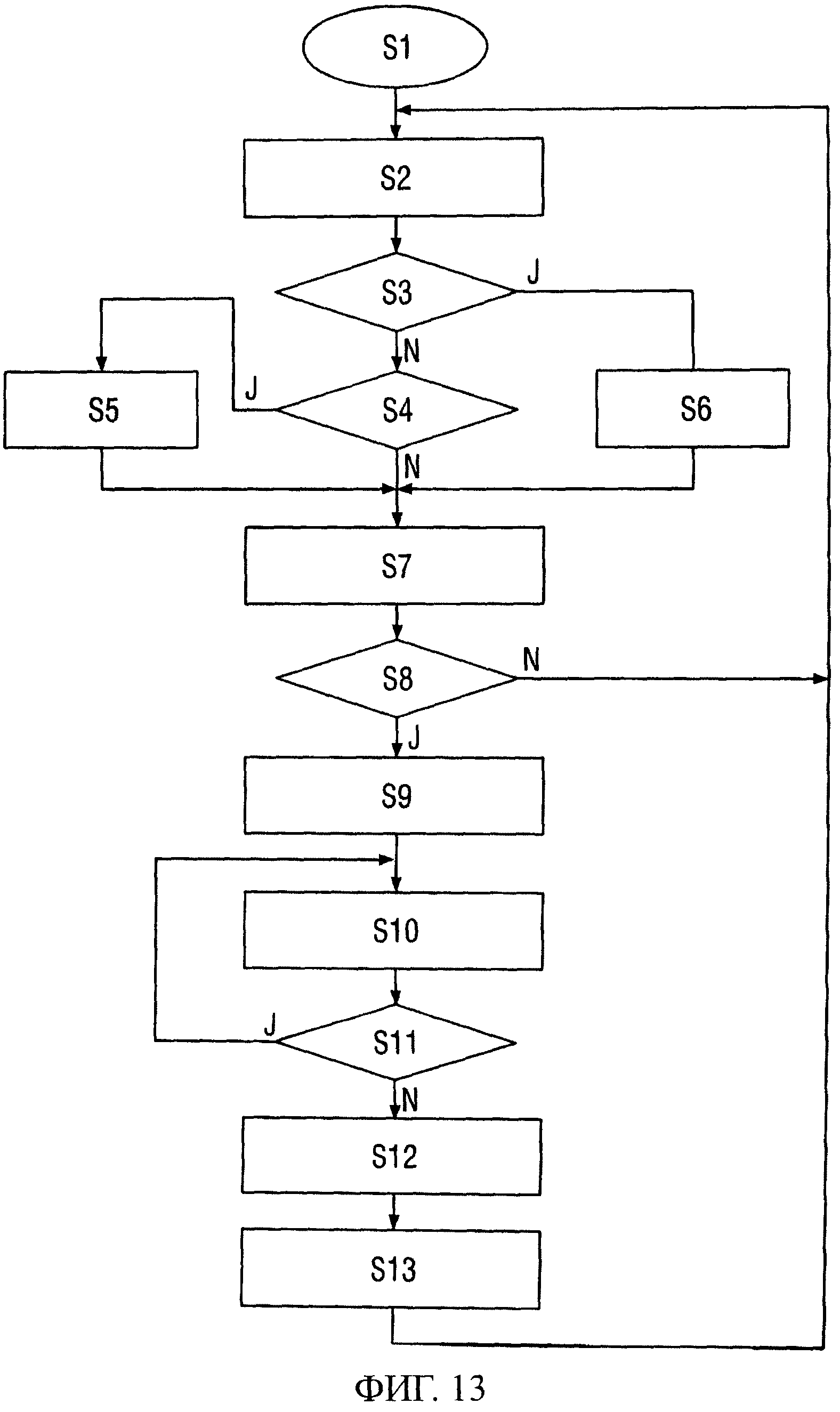
фиг.13 изображает блок-схему способа, согласно которому убранная масса, подаваемая из разгрузочной трубы зернового бункера в устройство заполнения, распределяется в сборном контейнере до достижения предварительно заданного максимального уровня заполнения во всем сборном контейнере,
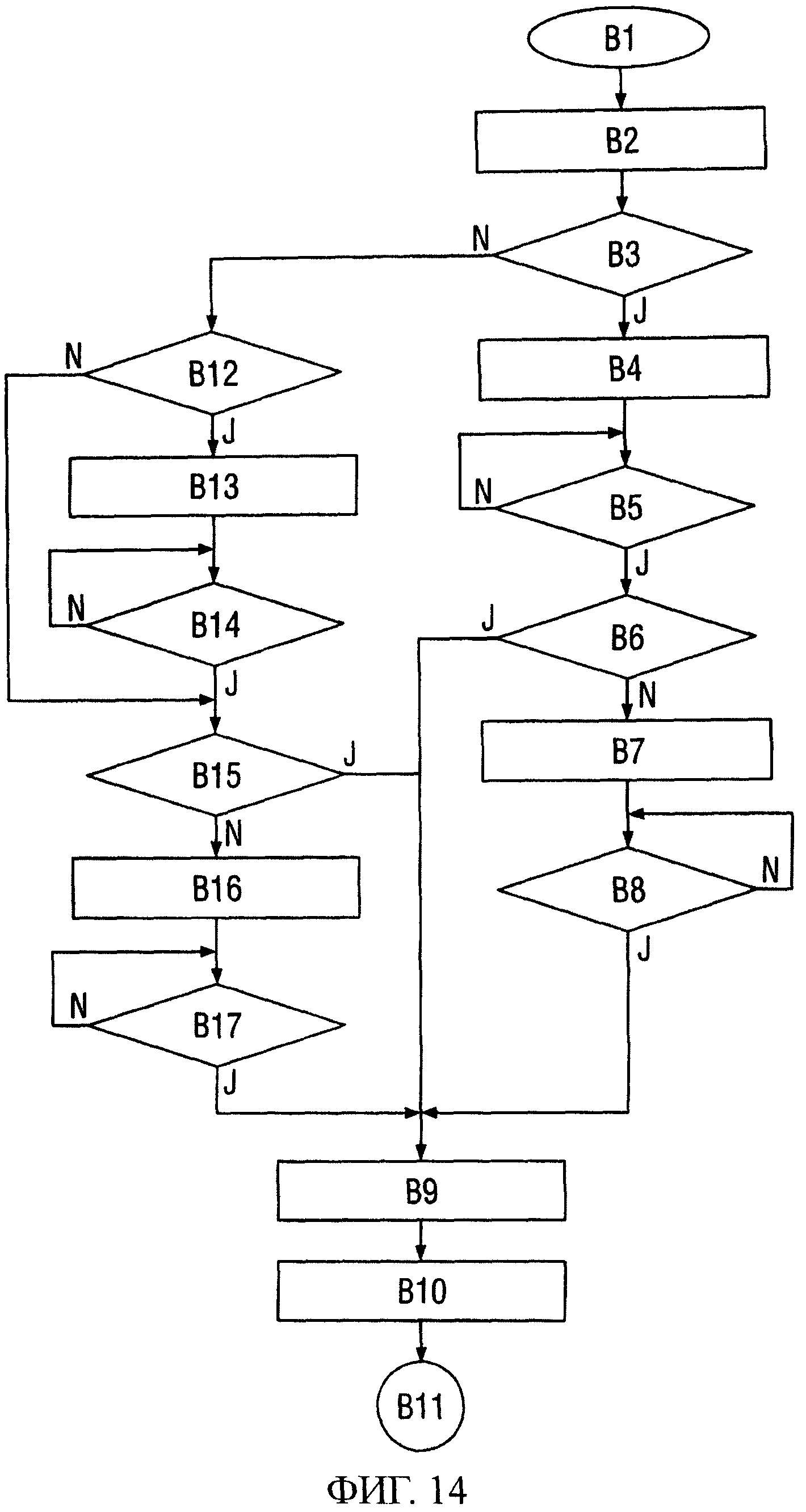
фиг.14 изображает блок-схему способа, согласно которому накопленная в зерновом бункере комбайна убранная масса выгружается в сборный контейнер.
Осуществление изобретения
На фиг.1 показан самоходный зерноуборочный комбайн 1, в передней области которого установлен предпочтительно сменный уборочный навесной аппарат 2. Этот уборочный навесной аппарат 2 имеет относительно большую рабочую ширину и значительно выступает с обеих сторон за ширину комбайна 1, а следовательно, за пределы его ходового механизма, молотильного устройства и других компонентов. Предпочтительно уборочный навесной аппарат 2 является жатвенным аппаратом для уборки зерновых или рапса. Далее, в своей средней области позади не показанной кабины водителя комбайн 1 содержит зерновой бункер 3, от которого выполненная в виде разгрузочной трубы 4 зернового бункера подающая труба отходит в левую сторону, если смотреть в направлении движения комбайна 1. Эта разгрузочная труба 4 зернового бункера может поворачиваться в показанное на фиг.1 положение для опорожнения зернового бункера 3. Однако она может также переводиться в транспортное положение комбайна 1, при котором она проходит параллельно его продольной протяженности.
Далее, внутри разгрузочной трубы 4 зернового бункера расположен непоказанный транспортирующий шнек, служащий для опорожнения зернового бункера 3. В ходе уборки зерновых солома и полова поступают по непоказанному клавишному соломотрясу и поверх решет к заднему концу комбайна 1 в расположенную там соломорезку 5, которая обеспечивает измельчение и равномерное разбрасывание соломы и половы по убранной комбайном 1 поверхности поля, то есть по жнивью. Разгрузочная труба 4 зернового бункера снабжена отходящим под углом выпускным патрубком 6, который поворачивает подаваемую через разгрузочную трубу 4 убранную массу таким образом, что она поступает в виде потока 7 убранной массы в сборный контейнер 8, расположенный рядом с комбайном 1.
Сборный контейнер 8 имеет, с одной стороны, закрытое днище 9 и, с другой стороны, проходящий по периметру борт 10 или боковые стенки, причем на своей верхней стороне сборный контейнер 8, по меньшей мере, частично снабжен отверстием. Кроме того, передвижной сборный контейнер 8 расположен на ходовом механизме 11, так что во время процесса опорожнения зернового бункера он может в ходе уборки двигаться параллельно комбайну 1 в фиксированном положении относительно него. Далее, на фиг.1 показано, что от комбайна 1 по варианту 12 радиосвязи могут передаваться данные между комбайном 1 и непоказанной на этом чертеже приводной установкой сборного контейнера 8. И, наконец, на этом чертеже показана еще не убранная стебельчатая растительность 13 рядом с уборочным навесным аппаратом 2. Устройства и компоненты, описанные со ссылкой на фиг.1, обозначены теми же позициями на других чертежах.
На фиг.2 показан по существу тот же описанный комплекс машин, что и на фиг.1, но здесь он представлен очень схематично в уменьшенном виде сверху. Такие же схематичные изображения на виде сверху показаны также на фиг.3-7.
Далее, на фиг.2 видно, что сборный контейнер 8 прицеплен к сельскохозяйственному трактору 14, который, таким образом, образует промежуточную приводную установку сборного контейнера 8. Сельскохозяйственный трактор 14 находится в связи с комбайном 1 по уже упомянутой при описании фиг.1 линии 12 радиосвязи. Кроме того, по меньшей мере, комбайн 1 должен быть оснащен системой навигации, с помощью которой текущее положение комбайна 1 может определяться от GPS (Global Positioning System, GPS - глобальная система навигации и определения положения). Сельскохозяйственный трактор 14 также может иметь систему навигации, при этом две системы должны быть скоординированы между собой таким образом, что комбайн 1 и протягиваемый трактором 14 сборный контейнер 8 движутся с постоянным позиционированием относительно друг друга.
На фиг.2 видно, что уборочный навесной аппарат 2 комбайна 1 выступает от него с обеих сторон, а протягиваемый сельскохозяйственным трактором 14 сборный контейнер 8 движется за уборочным навесным аппаратом 2, то есть в пределах его габарита. Во время процесса уборки, то есть при скашивании стебельчатой массы, ее обмолоте и очистке, одновременно производится опорожнение зернового бункера 3 через развернутую разгрузочную трубу 4 зернового бункера 3. На фиг.2 она заканчивается в передней области сборного контейнера 8 и подает убранную массу через не показанный на фиг.2 выпускной патрубок 6 к устройству заполнения, выполненному в виде транспортирующего шнека 15.
При этом подача осуществляется в передней области сборного контейнера 8, а транспортирующий шнек 15 в качестве продольного транспортера транспортирует убранную массу в другие области сборного контейнера 8. При этом, как показано на фиг.2, транспортирующий шнек 15 может быть расположен в транспортирующем лотке 16 с несколькими регулируемыми выходными областями 17. В данном примере выполнения на заднем конце сборного контейнера находится датчик 18 для отслеживания уровня заполнения сборного контейнера 8. Кроме того, как на комбайне 1, так и на сельскохозяйственном тракторе 14 расположены датчики 19 расстояния, которые независимо от управления обоими транспортными средствами 1 и 14 или 8 посредством навигационной системы выполняют дополнительную функцию безопасности, то есть предотвращают случайное столкновение двух транспортных средств 1 и 8 или 14.
Изображение по фиг.3 по существу соответствует изображению по фиг.2 и здесь использованы те же позиции. На фиг.3 комбайн 1 по фиг.1 оснащен соломорезкой 5. При этом соломорезка 5 имеет направляющее устройство 19а для регулировки разбрасывания соломы и половы за комбайном. Это направляющее устройство 19 регулируется с помощью исполнительного элемента 20 таким образом, что ширина 20а разбрасывания за комбайном 1 может быть уменьшена с одной стороны. Как видно на фиг.3, измельченные фракции растительности укладываются на жнивье только в той области, которая находится за пределами области движения сборного контейнера 8.
Комплекс по фиг.4 отличается от примеров осуществления по фиг.2 и 3 только тем, что в передней области сборного контейнера 8 предусмотрена загрузочная воронка 21, в которую заходит разгрузочная труба 4 зернового бункера. В данном случае от загрузочной воронки 21 отходит транспортирующий шнек 15. Далее, на фиг.4 видно, что загрузочная воронка 21 находится в области над дышлом, с помощью которого передвижной сборный контейнер 8 присоединен к сельскохозяйственному трактору 14.
Согласно фиг.5 передвижной сборный контейнер 8 протягивается тягачом 22, который имеет заднюю грузовую платформу 23. На этой грузовой платформе 23 предусмотрен промежуточный накопитель 24, из которого убранная масса подается с помощью промежуточного транспортера 25 к транспортирующему шнеку 15, расположенному в сборном контейнере 8. Далее транспортирующий шнек 15 совместно с непоказанными направляющими устройствами производит распределение убранной массы в сборном контейнере 8.
На фиг.6 и 7 показан комплекс, в котором сборный контейнер 8 также осуществляет синхронное движение с комбайном 1. Однако здесь протягиваемый сельскохозяйственным трактором 14 сборный контейнер 8 находится за пределами габарита уборочного навесного аппарата 2. Сборный контейнер может занимать это положение относительно комбайна только тогда, когда жатва производится не в сплошной растительности или когда разгрузочная труба 4 зернового бункера ни в один момент времени не оказывается на стороне несжатой растительности. В примере осуществления по фиг.6 разгрузочная труба 4 зернового бункера должна заканчиваться в середине сборного контейнера 8, так что, по меньшей мере, один транспортирующий шнек 15 должен производить транспортирование в противоположных направлениях сборного контейнера. При этом транспортирующий шнек 15 может быть разделен на части с приводом вращения двух частей в различных направлениях. Однако он может быть также выполнен в виде одного вала с противоположным ходом шнеков, так что при одном направлении вращения двух участков производится подача в направлениях к обоим концам сборного контейнера 8. Согласно фиг.7 убранная масса подается сбоку в переднюю область сборного контейнера 8, причем для этого предусмотрена боковая загрузочная воронка 26. Через эту загрузочную воронку 26 убранная масса поступает в приемную область транспортирующего шнека 15,
Дополнительная информация относительно сборного контейнера 8 и устройства заполнения по изобретению может быть получена из фиг.8-12.
На фиг.8 в соответствии с фиг.2 убранная масса с помощью разгрузочной трубы 4 зернового бункера и ее выпускного патрубка 6 подается в переднюю область сборного контейнера 8, причем транспортирующий шнек 15 распределяет убранную массу по всей длине сборного контейнера 8.
На фиг.9 подача убранной массы производится в середину сборного контейнера 8, как это предусмотрено на фиг.6. При этом в противоположность примеру осуществления по фиг.6 сборный контейнер 8 вместе с сельскохозяйственным трактором 14 может находиться в пределах габарита уборочного навесного аппарата 2.
Согласно фиг.10 в верхней области сборного контейнера 8 предусмотрены другие датчики 27 и 28 для отслеживания уровня заполнения сборного контейнера в его средней области, чтобы обеспечивать полное заполнение.
Согласно фиг.11 и 12 должна отслеживаться подача убранной массы к транспортирующему шнеку 15. Для этой цели согласно фиг.11 предусмотрен ультразвуковой датчик 29, который отслеживает поток 7 убранной массы и через соответствующую электронную систему посылает сообщение о сбоях на непоказанный монитор, расположенный в кабине водителя комбайна 1. Ту же функцию может выполнять на фиг.12 камера 30, которая передает на монитор соответствующие сообщения через систему обработки изображений.
Соответствующий процесс опорожнения бункера комбайна 1 в сборный контейнер 8 и требуемого для этого позиционирования комбайна 1 и протягивающего сборный контейнер сельскохозяйственного трактора 14 или тягача 22 относительно друг друга представлен в виде блок-схемы на фиг.13.
Согласно процессу на шаге S1 способа включают автоматическую систему опорожнения зернового бункера и на шаге S2 производят установку того, в каком положении должно выполняться опорожнение от убранной массы: на шаге А1 способа за уборочным навесным аппаратом 2 или на шаге А2 рядом с ним. Кроме того, имеется возможность исключения этой функции. Далее на шаге S3 устанавливают, производится ли опорожнение бункера за уборочным навесным аппаратом 2, то есть согласно А1 при работе соломорезки 5. Если это имеет место, то по варианту «да» осуществляется переход к шагу S6 для активизации одностороннего ограниченного разбрасывания измельченной массы.
По варианту «нет» за шагом S3 следует шаг S4. Если на шаге S4 функция опорожнения бункера отключена или сборный контейнер 8 следует рядом с уборочным навесным аппаратом 2, то по варианту «да» осуществляется переход к шагу S5 нормальной работы соломорезки. Вслед за этим на шаге S7 определяется статус сборного контейнера 8 и процесса опорожнения бункера комбайна. На шаге S8 производится проверка разрешения процесса опорожнения бункера для комбайна и сборного контейнера. Если нет, то по варианту «нет» система возвращается назад, то есть процедура начинается снова от шага S1 включения автоматической системы. По варианту «да» процедура продолжается, и на шаге S9 включается процесс опорожнения бункера.
На шаге S10 способа определяются статус сборного контейнера и статус процесса опорожнения бункера комбайна, причем на шаге S11 проверяется разрешение процесса опорожнения бункера для комбайна и сборного контейнера. Если оно есть, то по варианту «да» следует соответствующее сообщение, и процесс продолжается. Если разрешения нет, то сообщение следует по варианту «нет», и на шаге S12 процесс опорожнения бункера прерывается. На шаге S13 следуют различные сообщения статуса, такие как «Процесс опорожнения бункера выключен», «Сборный контейнер полон», «Положение опорожнения бункера покинуто» или «Опорожнение бункера прервано», которые передаются на монитор в кабине водителя комбайна 1 и/или сельскохозяйственного трактора 14 или тягача 22. В этом случае вся процедура возвращается в положение после включения автоматической системы, то есть после шага S1. Пояснения по отдельным шагам способа даны также в перечне позиций.
На фиг.14 показана блок-схема процесса заполнения сборного контейнера 8 применительно к его заполнению при подаче в среднюю область. Вначале на шаге В1 производится активизация автоматической системы заполнения, затем в соответствии с шагом В2 осуществляется подача шнеком из этой области в переднюю область, сборного контейнера 8, - положение 1 или в заднюю область, - положение 2. В этом отношении следует запрос: при направлении подачи вперед, то есть в положение 1, нет ли еще указания «полон» от датчика, определяющего уровень заполнения. Если его еще нет, то по варианту «да» на шаге В4 направление подачи транспортирующего шнека вперед включается или эта настройка сохраняется. В противном случае активизируется вариант «нет», который будет описан ниже.
Далее на шаге В5 следует запрос, дает ли датчик уровня заполнения передней области сигнал «полон». Если спереди еще не достигнут максимальный уровень заполнения, по варианту «нет» обеспечивается продолжение передней области сборного контейнера. Если в противоположность этому спереди достигнут максимальный уровень заполнения, то по варианту «да» процедура переходит к шагу В6, где с помощью другого датчика уровня заполнения проверяется, достигнут ли максимальный уровень заполнения также в задней области сборного контейнера 8. Если это так, то активизируется вариант «да» и на шаге В9 работа транспортирующего шнека выключается, а на шаге В10 следует сообщение «Сборный контейнер полон». В заключение на шаге В11 выключается вся автоматическая система заполнения. Кроме того, сигнал на шаге В8 имеет вариант «нет», при котором процесс заполнения в задней области сборного контейнера продолжается до тех пор, пока не будет достигнут максимальный уровень заполнения.
От запроса на шаге В3 вариант «нет» открывает другой процесс, параллельный описанному. При этом на шаге В12 определяется, включен ли транспортирующий шнек на подачу назад или продолжает подачу назад при установке направления подачи транспортирующего шнека назад и наличии сигнала о том, что сборный контейнер сзади неполон. В варианте «да» на шаге В13 достигается состояние включения транспортирующего шнека для подачи назад. В варианте «нет», то есть если сборный контейнер полон при этом направлении подачи транспортирующего шнека, процесс переходит к сигналу на шаге В15. При этом если вариант «да» подтверждает, что сборный контейнер 8 полон сзади, то процедура заполнения заканчивается последовательностью шагов В9, В10 и В11. В заключение на шаге В13 еще раз осуществляется запрос в соответствии с шагом В14, достигнут ли максимальный уровень заполнения сзади, причем в варианте «нет» процедура заполнения продолжается. В варианте «да» сигнала по В14 проверка продолжается на шаге В15. На шаге В15 производится стандартный запрос, достигнут ли максимальный уровень заполнения также спереди. Если это так, то в варианте «да» работа транспортирующего шнека заканчивается последовательностью шагов В9, В10 и В11. В варианте «нет» от шага В15 устанавливается режим включения транспортирующего шнека на подачу вперед. В связи с этим на шаге В17 вновь проводится проверка полноты уровня заполнения спереди. В этом случае также соответствующая процедура заполнения продолжается до достижения указанного состояния полноты. Далее процедура заканчивается шагами В9, В10 и В11. Отдельные шаги способа заполнения поясняются также их описанием в перечне позиций.
Благодаря уборочному комплексу по изобретению и способу, который может осуществляться этим уборочным комплексом, сборный контейнер выгодным образом работает в фиксированном положении относительно зерноуборочного комбайна 1. В начале процесса опорожнения бункера разгрузочная труба 4 зернового бункера также перемещается в соответствующее положение подачи. Устройство заполнения, которое предпочтительно состоит из, по меньшей мере, одного транспортирующего шнека 15, оптимально распределяет убранную массу в сборном контейнере 8, а от датчиков 18, 27 и 28 выдаются сообщения, когда сборный контейнер заполнен полностью. Далее, преимущество состоит в том, что процесс опорожнения бункера может выполняться за уборочным навесным аппаратом 2 зерноуборочного комбайна 1, а включенная соломорезка 5 производит разбрасывание измельченной массы таким образом, что она не подается на колею движения сельскохозяйственного трактора 14 и прицепленного к нему сборного контейнера 8. Кроме того, предусмотрено множество функций отслеживания для обеспечения того, что даже при неблагоприятных условиях весь поток 7 убранной массы подается в сборный контейнер и оптимально распределяется в нем.
Перечень ссылочных обозначений
Реферат
Группа изобретений относится к сельскому хозяйству и может быть использована при уборке сельскохозяйственных культур. Уборочный комплекс состоит из самоходной уборочной машины и оснащенного приводной установкой передвижного сборного контейнера, который выполнен с возможностью позиционирования относительно уборочной машины и перемещения параллельно ей. При уборке сельскохозяйственных культур к сборному контейнеру через снабженную выпускным патрубком транспортирующую трубу подают убранную массу от уборочной машины. Сборный контейнер снабжен устройством для его равномерной загрузки. Сборный контейнер с помощью устройства управления располагают в постоянном положении относительно уборочной машины. Использование группы изобретений устраняет потери убранной массы и обеспечивает полное заполнение сборного контейнера. 2 н. и 17 з.п. ф-лы, 14 ил.
Комментарии