Устройство для оптимизации перегрузки убранной массы на сельскохозяйственное транспортное средство (варианты) - RU2282972C2
Код документа: RU2282972C2
Чертежи
Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству оптимизации перегрузки убранной массы из уборочной машины на транспортное средство.
Уровень техники
Уборочные машины, такие как зерноуборочные комбайны и полевые измельчители, в процессе работы непрерывно принимают убранную массу, обрабатывают ее известным образом и выгружают в грузовой контейнер либо непрерывно (например, при работе полевого измельчителя), либо с промежуточным хранением (например, при работе зерноуборочного комбайна). Для этой цели уборочные машины оснащаются перегрузочными устройствами. В зерноуборочных комбайнах перегрузочное устройство образовано выпускным патрубком зернового бункера, а в полевых измельчителях оно образовано выбросной разгрузочной трубой. Грузовой контейнер может либо непосредственно находиться на транспортном средстве, либо навешиваться на транспортное средство с помощью навесного устройства.
При непрерывной разгрузке убранной массы, как это производится при работе полевого измельчителя, транспортное средство следует рядом с уборочной машиной или за ней. Во время непрерывного движения очень трудно обеспечить перегрузку без потерь, когда убранная масса падает мимо контейнера, и максимально возможное заполнение контейнера.
При работе зерноуборочных комбайнов, в которых убранная масса накапливается в машине, для сокращения времени все чаще производят перегрузку (опорожнение зернового бункера) в процессе уборки, то есть также при движении уборочной машины.
Известны различные устройства, направленные на оптимизацию процесса перегрузки. В таких устройствах с помощью оптических или акустических датчиков определяется относительное положение между уборочной машиной и транспортным средством или направление ориентации перегрузочного устройства к грузовому контейнеру. На основании измеренных данных вручную или автоматически должно регулироваться положение перегрузочного устройства для оптимальной перегрузки убранной массы. При этом должна обеспечиваться обратная связь с различными механизмами регулирования перегрузочного устройства. Так, например, разгрузочная труба полевого измельчителя может поворачиваться вокруг горизонтальной и вертикальной осей. Кроме того, на конце разгрузочной трубы имеется поворотная отбойная заслонка, с помощью которой дополнительно регулируется направление потока убранной массы.
Устройство такого типа для полевого измельчителя известно, например, из патентного документа ФРГ №4426059 А1. В нем предусмотрена камера, область восприятия которой направлена на отбойную заслонку и на грузовой контейнер. Изображение передается на монитор для водителя полевого измельчителя для регулирования положения перегрузочного устройства (разгрузочной трубы с отбойной заслонкой). Это устройство является наиболее близким аналогом к заявляемому изобретению.
Недостаток всех этих устройств состоит в том, что они не срабатывают, если водитель транспортного средства неопытен или невнимателен и уводит транспортное средство с контейнером за пределы области регулирования перегрузочного устройства.
Сущность изобретения
Задача, на решение которой направлено настоящее изобретение, заключается в создании устройства для оптимизации перегрузки убранной массы, которое не зависит от водителя транспортного средства.
В соответствии с изобретением решение поставленной задачи достигается за счет того, что на уборочной машине предусмотрено по меньшей мере одно устройство управления для генерирования управляющих сигналов скорости движения и/или угла направления для транспортного средства. При этом на уборочной машине имеется передающее устройство для беспроводной передачи управляющих сигналов на транспортное средство. На транспортном средстве предусмотрено приемное устройство для приема передаваемых от уборочной машины управляющих сигналов. Кроме того, на транспортном средстве предусмотрено по меньшей мере одно устройство регулирования для автоматической установки скорости движения (так называемый регулятор обгона) и/или угла направления (автопилот). К этому устройству (устройствам) регулирования подводятся передаваемые от уборочной машины управляющие сигналы, так что устройство (устройства) регулирования устанавливает(ют) скорость движения и/или угол направления в зависимости от управляющих сигналов. При этом оператор может вернуться к управлению с помощью известных устройств регулирования для регулирования скорости движения и угла направления.
В одном из примеров выполнения на транспортном средстве, например, в кабине водителя имеется по меньшей мере один переключатель, посредством которого привод транспортного средства может переключаться между ручной установкой скорости движения и/или угла направления водителем и автоматической установкой в соответствии с управляющими сигналами. За счет этого водителю предоставляется возможность свободно решать в любой момент, будет ли он управлять транспортным средством вручную или переведет его на режим автоматического ведения от уборочной машины. Так, водитель транспортного средства может подать его в положение перегрузки с ручным управлением, а затем при желании установить переключатель таким образом, что с этого момента управление скоростью движения или углом направления или обоими параметрами осуществляется от уборочной машины.
По соображениям безопасности ручное воздействие, например, на руль, педаль газа или педаль тормоза имеет приоритет над автоматическим управлением транспортным средством и выводит его из действия.
В одном из примеров выполнения предусмотрено, что устройство управления для генерирования управляющих сигналов скорости движения и/или угла направления может управляться вручную водителем уборочной машины. Для этой цели в кабине водителя расположен элемент управления, который может быть выполнен, например, в виде джойстика. Путем смещения джойстика вперед или назад водитель уборочной машины может, например, повышать или снижать скорость движения транспортного средства, а при поперечных смещениях джойстика поворачивать транспортное средство вправо или влево. Таким образом, водитель уборочной машины, который сидит выше водителя транспортного средства может направлять движение транспортного средства для обеспечения оптимальной перегрузки.
Альтернативно ручному воздействию на устройство управления предусмотрено, что относительное взаимное положение уборочной машины и транспортного средства определяется с помощью по меньшей мере одного датчика, известного специалистам в данной области (оптического, акустического, радара). С помощью данных определенного таким образом относительного положения согласно изобретению в устройстве управления автоматически вычисляются управляющие сигналы для скорости движения и/или угла направления транспортного средства.
В другом примере выполнения изобретения для определения положения на уборочной машине и на транспортном средстве предусмотрен приемник глобальной спутниковой системы навигации и определения положения (GPS), предпочтительно приемник фазодифференциальной (P-D) глобальной спутниковой системы навигации и определения положения (P-DGPS). При этом транспортное средство передает на уборочную машину свои действительные (текущие, мгновенные) данные положения, определенные датчиком глобальной спутниковой системы навигации и определения положения. В соответствии с изобретением по этим данным положения уборочной машины и транспортного средства в устройстве управления автоматически вычисляются управляющие сигналы для скорости движения и/или угла направления транспортного средства. Для передачи данных глобальной спутниковой системы навигации и определения положения от транспортного средства на уборочную машину на транспортном средстве предусмотрено передающее устройство, а на уборочной машине - приемное устройство. Предпочтительно как на уборочной машине, так и на транспортном средстве предусмотрены также соответственно передающее и приемное устройства.
В другом примере выполнения предусмотрено, что текущие данные скорости движения и/или угла направления уборочной машины используются для определения управляющих сигналов для скорости движения и/или угла направления транспортного средства. Таким образом, скорость движения и/или угол направления транспортного средства автоматически повторяют данные уборочной машины. При этом в базовом варианте скорость движения и/или угол направления транспортного средства регулируются непосредственно в соответствии со скоростью движения и/или углом направления уборочной машины без передачи на уборочную машину текущих величин этих данных на транспортном средстве.
В устройстве для оптимизации перегрузки убранной массы предпочтительно, чтобы устройство для координации движения транспортных средств на обрабатываемом поле посредством управления скоростью движения и/или углом направления было связано по меньшей мере с устройством для вычисления данных режима работы по меньшей мере одного транспортного средства или уборочной машины.
В расширенном варианте транспортное средство передает свои текущие данные (скорости движения и/или угла направления) на уборочную машину, в устройстве управления которой с учетом этих текущих величин генерируются величины корректировки в качестве управляющих сигналов для скорости движения и/или угла направления транспортного средства. В этом примере выполнения для передачи текущих данных как на уборочной машине, так и на транспортном средстве предусмотрены передающие устройства, предпочтительно объединенные в приемно-передающие аппараты.
В том случае, когда уборочная машина управляется посредством регулятора обгона и автопилота для рулевого управления, устройство управления может использовать данные от этих автоматических органов для генерирования управляющих сигналов скорости движения и/или угла направления для транспортного средства. Для этого транспортное средство имеет непосредственную связь с регулятором обгона и автопилотом.
Устройство по изобретению дополнительно обеспечивает надежную защиту от аварий, в особенности в тех случаях, когда транспортное средство движется за уборочной машиной, как это бывает необходимо при обработке делянки с помощью полевого измельчителя. Если полевой измельчитель должен резко затормозить, например, из-за неожиданного препятствия, устройство управления может генерировать соответствующий сигнал торможения или остановки, передаваемый на транспортное средство. Необходимое для этого время составляет лишь небольшую долю времени реакции водителя транспортного средства.
Решение поставленной задачи достигается также за счет устройства, которое имеется по меньшей мере на одной подвижной единице и выбирает режим работы по меньшей мере собственной подвижной единицы, и используется по меньшей мере в одном устройстве одной подвижной единицы. Такое устройство обеспечивает возможность того, что имеющееся в данный момент состояние подвижной единицы приспособлено к режиму работы и оно может использоваться в подвижной единице для дальнейшего прохождения. Таков режим работы уборочной машины, прием и уборка убираемой массы при нормальной эксплуатации. Другой режим работы может осуществляться под действием предохранительного устройства защиты от повреждений транспортного средства в виде режима мгновенной остановки, например, по команде детектора металла в захватывающих органах машины. При наступлении этого режима оператор подвижной единицы информируется об этом посредством акустического или оптического индикаторного устройства. В другом примере выполнения при наступлении этого режима сигнал передается прямо на привод хода и, при необходимости, на тормоза подвижной единицы, и в оптимальном случае достигается ее быстрая остановка. Предпочтительно за счет этого достигается то, что по меньшей мере уборочное транспортное средство больше не может принимать убираемую массу с обрабатываемого поля, или убранная масса не скапливается перед машиной или в ней.
В следующем примере выполнения по меньшей мере одна подвижная единица на обрабатываемом поле оснащена индикаторным устройством, которое указывает видимым извне образом данные режима работы работающей в данный момент подвижной единицы, например с помощью разноцветных ламп. Преимущество этого решения заключается в том, что информация о режиме работы данной подвижной единицы может считываться на других подвижных единицах. В особенности при уборке в темноте визуальная связь между водителями может быть недостаточной, и индикаторное устройство по изобретению позволяет оптимальным образом устранить этот недостаток. Таким образом, при перегрузке убранной массы на транспортное средство водитель транспортного средства получает информацию о режиме работы уборочной машины без необходимости звуковой или визуальной связи между водителями. Кроме того, на обрабатываемом поле могут находиться и другие транспортные средства. Они также оснащены индикаторными устройствами, которые указывают их собственный режим. Так например, зеленый свет может означать «ожидание в неподвижном положении», мигающий свет - «порожняя подвижная единица», красный свет или выключенный свет - «подвижная единица загружена». Кроме того, информация режима может поддерживаться акустическими средствами или же индикаторное устройство может быть многоцветным. В том случае, когда отдельные транспортные средства выполнены в виде машин автоматического вождения без водителя, могут быть необходимы и использоваться другие формы индикации разнообразных режимов.
В дальнейшем примере выполнения данные режима работы подвижной единицы передаются по меньшей мере на одно другую подвижную единицу с помощью линии передачи данных. За счет этого обеспечивается дальнейшее усовершенствование устройства, так как оно дает возможность указывать режим работы независимо от мгновенного положения подвижной единицы, передающей данные. Так например, данные режима работы передаются на другую подвижную единицу через линию передачи данных и там указываются водителю на мониторе или на индикаторном устройстве. Это индикаторное устройство может быть выполнено также в виде переносного аппарата с приемным устройством, так что оно может быть установлено в любом месте в поле зрения водителя, например на переднем борту грузового контейнера. В этом случае в другом устройстве на принимающем транспортном средстве могут быть выработаны другие реакции на передаваемые данные режима. Так, если от уборочной машины передается изменение режима работы, например режим немедленной остановки, либо водитель транспортного средства может реагировать на него путем снижения скорости, либо этот режим может передаваться в устройство управления транспортного средства для автоматического перевода транспортного средства в режим остановки, например, с помощью устройства управления приводом. Кроме того, линия передачи данных может использоваться для передачи другой информации между подвижными единицами. В этом случае на переносном устройстве могут быть предусмотрены дополнительные индикаторные средства, например световые указатели в виде стрелок направления.
В следующем примере выполнения передаваемый режим работы снабжен приоритетом (старшинством). За счет этого более важный режим может быть выделен по сравнению с менее важным, и в отдельных устройствах принимающих подвижных единиц производится генерирование сигналов реакции на данный режим с фильтрацией согласно его приоритету.
В следующем примере выполнения посредством по меньшей мере принадлежащего подвижной единице устройства, которое вычисляет данные режима работы собственной подвижной единицы, эти данные передаются на передающее устройство линии передачи данных и затем указанные данные режима работы передаются циклически, в зависимости от событий и/или по внешнему запросу о данных режима работы. В этом случае достигается выгодное снижение загрузки линии передачи данных. Если на транспортном средстве или на уборочной машине происходит какое-либо событие, ведущее к изменению режима работы, это изменение может использоваться для активизации связи для передачи данных текущего режима работы. Кроме того, создается возможность запроса данных режима работы другого транспортного средства или уборочной машины через линию передачи данных. Эта возможность имеет особые преимущества в тех случаях, когда на соответствующем транспортном средстве или уборочной машине нет видимых извне индикаторных устройств для указания действительного режима работы данной машины или же эти устройства в данный момент скрыты и не видны.
В следующем примере выполнения режим работы подвижной единицы изменяется по команде собственного устройства управления подвижной единицы или по команде внешнего устройства. За счет этого информация может передаваться водителю от любого устройства, которое является управляющим в данный момент. Так например, при заполнении грузового контейнера в первую очередь об этом информируется водитель уборочной машины, и в этом случае он может дистанционно перевести подвижную единицу, например, в режим «Подвижная единица заполнена». Такое выполнение в особенности применимо для управления транспортными средствами автоматического вождения. Если на обрабатываемом поле находятся такие подвижные единицы, водитель уборочной машины может видеть режим работы транспортных средств на индикаторном устройстве или запросить данные по линии передачи данных. Если в поле зрения водителя уборочной машины попадает стоящее на поле или ожидающее транспортное средство, он может при необходимости побудить его к автоматическому следованию за уборочной машиной посредством изменения режима работы транспортного средства. За счет этого обеспечивается автоматическая координация режима работы транспортного средства в зависимости от уборочной машины как в том случае, когда водитель получает информацию управления на индикаторном устройстве, так и при автоматическом вождении транспортных средств. Для идентификации отдельных подвижных единиц они либо снабжены видимыми извне опознавательными знаками, либо могут быть свободно запрошены по линии передачи данных, либо подчинены режиму движения.
Предпочтительно, чтобы по меньшей мере одна функция подвижной единицы при изменении режима работы в соответствии с заданными прохождениями передаточной функции управлялась или по меньшей мере контролировалась с помощью собственного устройства подвижной единицы или внешнего устройства.
В следующем примере выполнения водитель уборочной машины посредством управляемого режима работы имеет возможность побудить другую подвижную единицу занять неподвижное положение ожидания, положение ожидания на относительном расстоянии в процессе движения, управляемое положение на относительном расстоянии в процессе движения и/или положение ожидания при движении к другому транспортному средству. В зависимости от того, какой режим работы осуществляется или устанавливается на подвижной единице, она побуждается к соответствующей реакции и соответствующему режиму поведения. В соответствии с собственным положением уборочной машины и выбранного режима работы другие транспортные средства могут удерживаться и направляться в движении относительно уборочной машины в следующих положениях:
- в положении перегрузки при перегрузке убранной массы в соответствующий грузовой контейнер при движении по полосе, параллельной полосе движения уборочной машины;
- в положении ожидания, в котором перегрузка не производится, например, на колее уборочной машины;
- или в одном из других относительных положений, например при движении по параллельной полосе к транспортному средству, на которое в данный момент производится перегрузка.
Если режим работы на транспортном средстве или уборочной машине изменяется, в зависимости от своего приоритета и оснащения соответствующего транспортного средства и уборочной машины он передается на другое транспортное средство или уборочную машину и вызывает там соответствующую реакцию.
Затем от уборочной машины может осуществляться координация транспортных средств в зависимости от текущих режимов работы отдельных транспортных средств или уборочной машины. Так, изменение режима работы подвижной единицы может управляться таким образом, что «порожнее» транспортное средство до начала перегрузки может быть переведено в соответствующее положение относительно уборочной машины, а находящееся в данный момент в режиме загрузки транспортное средство уже до окончания полной загрузки переведено в соответствующее положение относительно «порожнего» транспортного средства. Далее после окончательного заполнения грузового контейнера водитель уборочной машины переводит перегрузочное устройство таким образом, что убранная масса направляется теперь в «порожнее» транспортное средство. В заключение транспортное средство с загруженным контейнером переводится в положение ожидания относительно уборочной машины, и управление движением передается на «порожнее» транспортное средство. Координационное устройство посредством линии передачи данных изменяет «порожний» режим на режим «заполнение бункера» или «перегрузка» и управляет движением транспортного средства в положении перегрузки. Далее режим загруженного транспортного средства изменяется на «загруженное транспортное средство», и оно направляется в положение ожидания относительно уборочной машины. Когда уборочная машина, например, доходит до конца обрабатываемого поля, режим транспортного средства с загруженным контейнером изменяется на «загруженный неподвижный» с помощью его собственных соответствующих устройств управления, например с помощью тормозов или выключения двигателя. После этого данное транспортное средство выводится из связи с уборочной машиной, и его ведут к месту разгрузки контейнера уже с ручным управлением. Далее на конце обрабатываемого поля уборочная машина может побудить к следованию за ней ожидающее транспортное средство с водителем или средство автоматического вождения посредством соответствующего изменения режима этого ожидающего транспортного средства с помощью автоматической координации или информации водителю для ручного выполнения режима следования.
Предпочтительно устройство для вычисления данных режима работы по меньшей мере одного транспортного средства или уборочной машины связано по меньшей мере с устройством для координации движения транспортных средств на обрабатываемом поле посредством управления скоростью движения и/или углом направления.
Перечень чертежей
Примеры осуществления настоящего изобретения, будут подробнее описаны ниже со ссылками на прилагаемые чертежи, на которых:
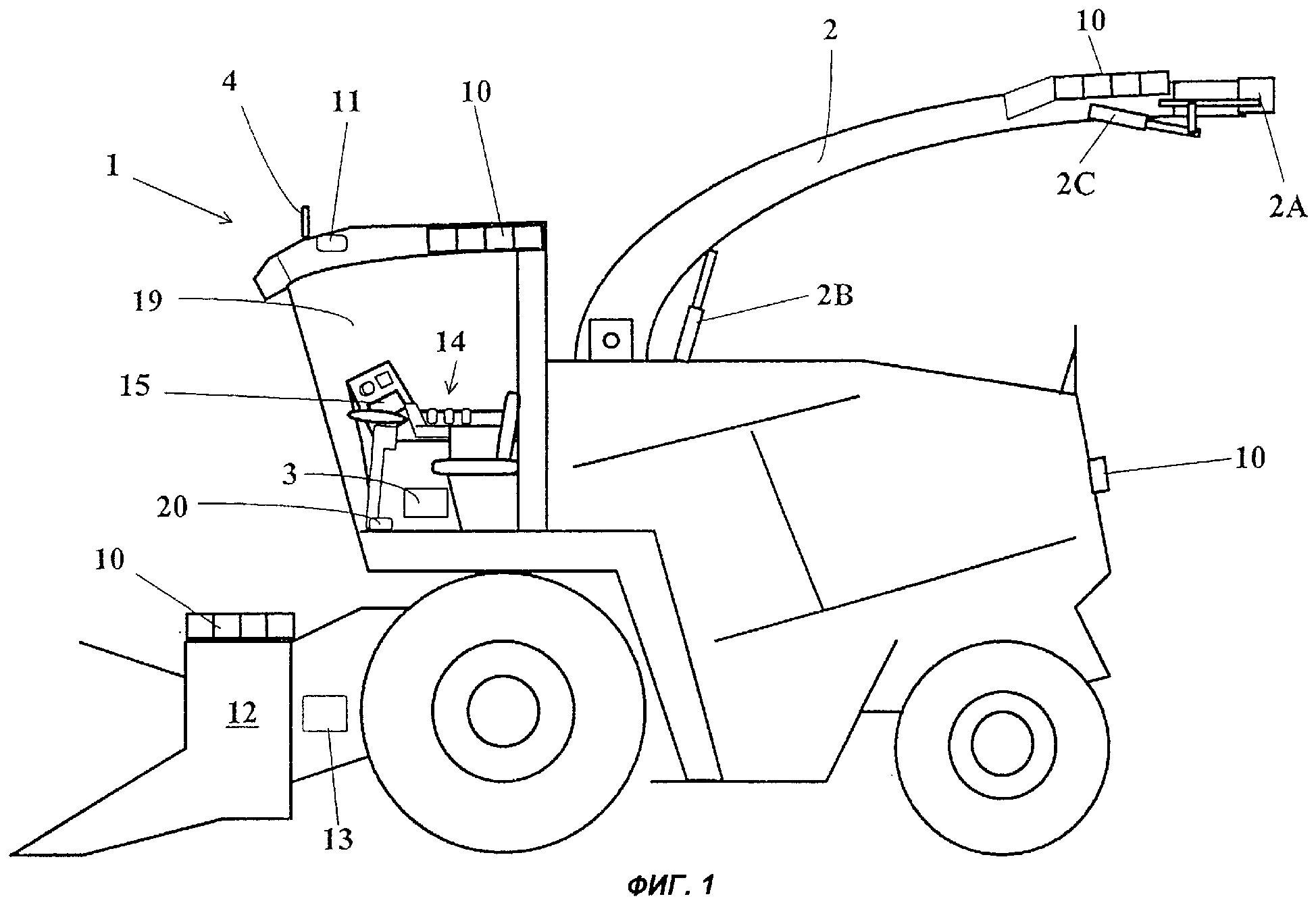
фиг.1 изображает на виде сбоку полевой измельчитель с перегрузочным устройством,
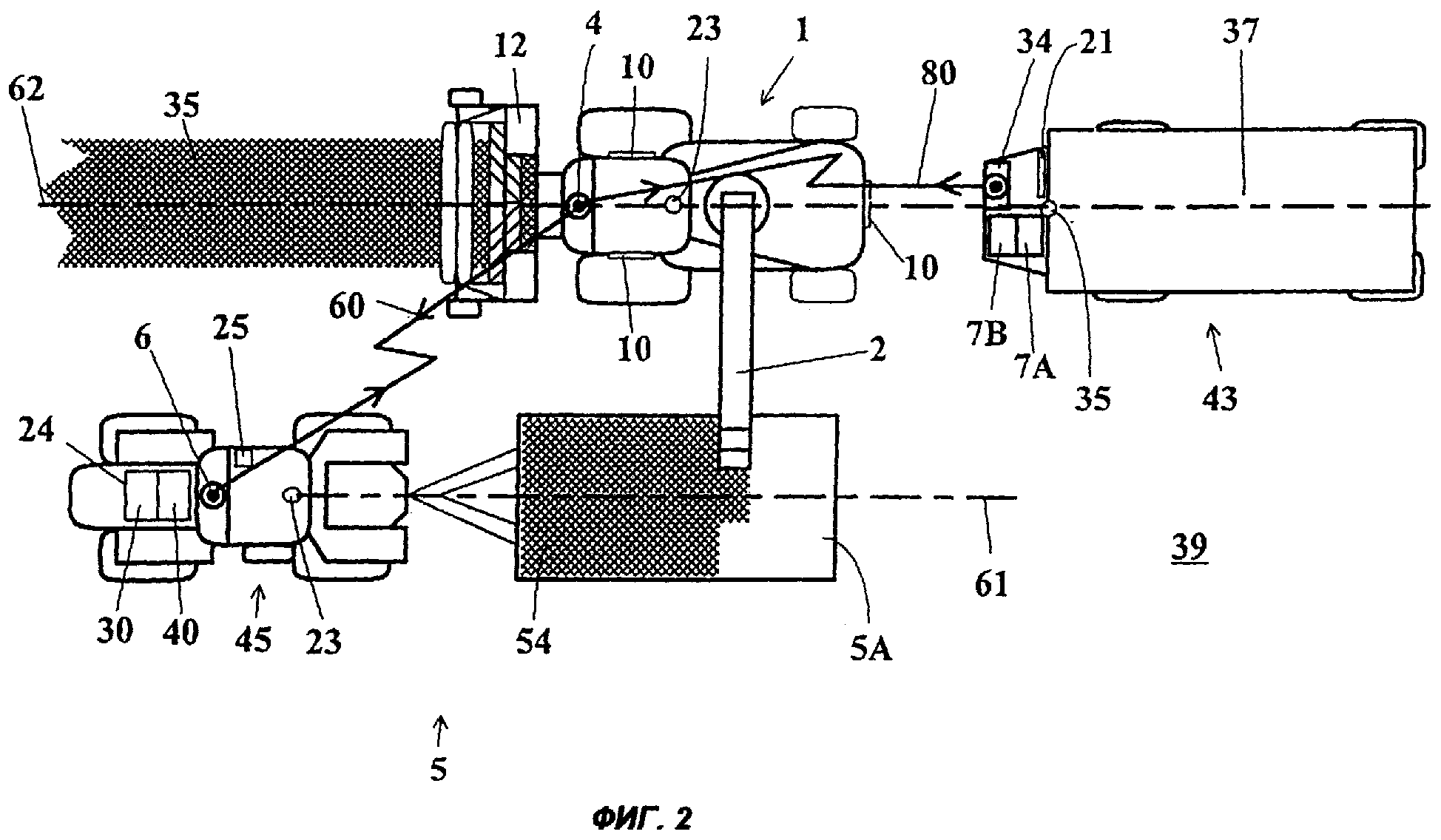
фиг.2 изображает на виде сверху полевой измельчитель и два транспортных средства на обрабатываемом поле,
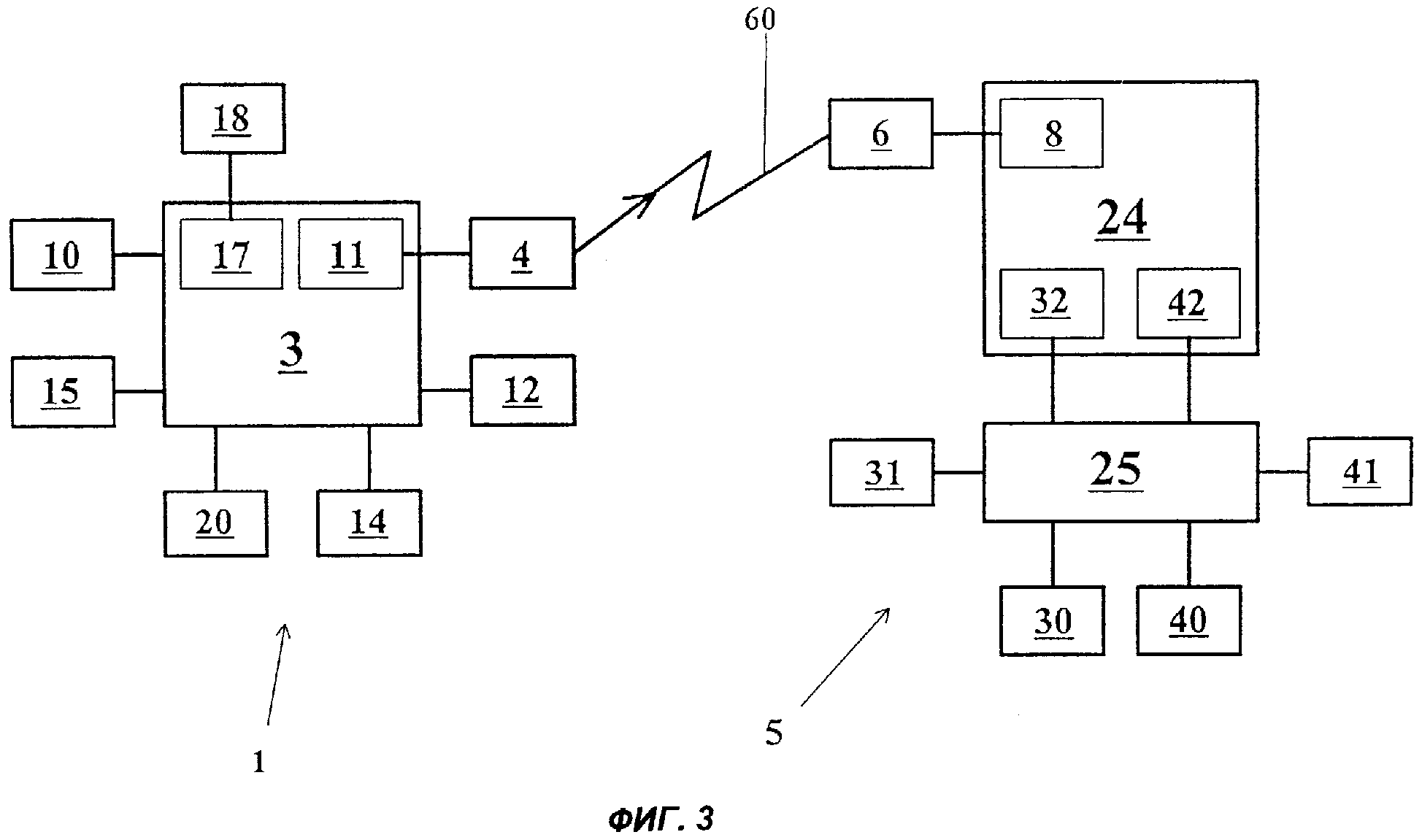
фиг.3 изображает структурную схему устройства по изобретению, предназначенного для оптимизации перегрузки убранной массы.
Сведения, подтверждающие возможность осуществления изобретения
На фиг.1 представлен полевой измельчитель 1, который забирает убираемую массу с помощью приемного аппарата 12, обрабатывает ее и перегружает на транспортное средство с помощью перегрузочного устройства в виде разгрузочной трубы 2. Машина содержит также регулирующий орган 2В для вертикального поворота разгрузочной трубы 2 и регулирующий орган 2С для регулирования положения отбойной заслонки 2А на конце разгрузочной трубы.
В кабине 19 полевого измельчителя 1 рядом с сиденьем водителя расположен пульт 14 управления с кнопками и выключателями управления, а также с индикаторами 15 для управления и индикации положения устройств и регулирующих органов полевого измельчителя 1. На пульте управления имеется устройство 3 управления для расчета параметров движения по меньшей мере для одного транспортного средства. Это устройство 3 управления связано с другими устройствами полевого измельчителя 1, например, посредством шины передачи данных для получения данных регулирования, информации о рабочих параметрах для водителя и других данных, необходимых для работы полевого измельчителя 1. Так, например, если детектор 13 металла определяет наличие металла в принятой измельчителем массе, этот сигнал воспринимается устройством 3 управления.
На полу кабины водителя расположен также выключатель 20, с помощью которого водитель полевого измельчителя 1 может управлять индикаторным устройством 10 и таким образом передавать указания водителю транспортного средства. Индикаторное устройство показано на фиг.1 в различных местах на измельчителе 1. Одно место его установки может быть предусмотрено на приемном аппарате 12, еще одно - на кабине 19 водителя, другие - на разгрузочной трубе, на заднем конце машины. При этом индикаторное устройство 10 как переносной аппарат может быть установлено в любом месте на полевом измельчителе и перенесено на транспортное средство. В данном примере выполнения на уборочной машине 1 показаны 4 указательные поверхности для по мере надобности возможного направления движения. Индикаторное устройство 10 в особенности применимо также для указания действительных данных режима работы уборочной машины 1. Соответствующее индикаторное устройство 10 может быть предусмотрено также на других машинах для указания их действительного режима работы. К устройству 3 управления подсоединено передающее устройство 11 с антенной 4. Передающее устройство 11 служит для беспроводной передачи на транспортное средство данных в виде величины скорости движения и/или угла направления. В другом примере выполнения это устройство может быть выполнено также в виде приемно-передающего устройства, обеспечивающего беспроводную двухстороннюю передачу сигналов и информации.
На фиг.2 показаны в плане полевой измельчитель 1 и два транспортных средства 5, 43 на обрабатываемом поле 39. При этом предусмотрено, что из полевого измельчителя 1 могут управляться несколько транспортных средств 5, 43. За счет этого может производиться одновременный вывод транспортного средства 5 из положения перегрузки и передвижение транспортного средства 43 из положения ожидания в положение перегрузки. Показанное на чертеже транспортное средство 5 состоит из тягача 45 и прицепленного к нему грузового контейнера 5А. В данный момент процесса убираемая масса 35, 54 перегружается с помощью разгрузочной трубы 2 в грузовой контейнер 5А, который уже частично заполнен. Транспортное средство 5 движется по полосе 61, параллельной полосе 62, и управляется относительно полевого измельчителя 1 для поддержания положения перегрузки. Полоса 62 движения полевого измельчителя 1 предварительно задается в соответствии с расположением подлежащей уборке массы 35 на обрабатываемом поле 39. С помощью навигационного аппарата и предназначенной для него антенны 23 глобальной спутниковой системы навигации и определения положения (GPS) определяется положение транспортного средства 5 на обрабатываемом поле 39, и эти данные передаются посредством антенн 6 и 4 по линии 60 связи на полевой измельчитель 1. Там эти данные положения обрабатываются в соответствующем устройстве вместе с данными положения самого полевого измельчителя 1, которые определяются с помощью другого навигационного аппарата с антенной 18 глобальной спутниковой системы навигации и определения положения, и устройство генерирует сигнал управления скоростью движения и/или углом направления транспортного средства 5. Эти сигналы передаются по линии 60 связи на соответствующее устройство 24 управления и соответствующим образом обрабатываются устройством 42 управления рулевой системой и устройством 32 управления приводом. Кроме того, в кабине тягача 45 предусмотрен переключатель 25 для переключения привода транспортного средства 5 с ручного регулирования скорости движения и/или угла направления на автоматический режим управления.
Другое транспортное средство 43 с грузовым контейнером 37 выполнено в виде машины с автоматическим вождением без участия человека. Транспортное средство 45 движется автоматически с управлением своего положения относительно полевого измельчителя 1 по полосе 62 в положении ожидания. Транспортное средство 43 оснащено антенной 23 глобальной спутниковой системы навигации и определения положения и дальнейшим устройством для управления устройством 7А регулирования угла установки и устройством 7В регулирования скорости движения. Параметры движения и другие данные принимаются транспортным средством 43 по линии 80 связи с помощью его коммуникационного устройства 34. На транспортном средстве 43 имеется также индикаторное устройство 21, посредством которого водитель полевого измельчителя 1 получает данные о действительном режиме работы транспортного средства 43.
На фиг.3 представлена структурная схема устройства по изобретению. Полевой измельчитель 1 оснащен устройством 3 управления, которое содержит навигационный аппарат 17 с антенной 18 глобальной спутниковой системы навигации и определения положения и передающее устройство 11 с антенной 4. Это устройство 3 управления связано с индикаторами 15, пультом 14 управления и по меньшей мере с одним индикаторным устройством 10. Устройство 3 управления получает также данные от элементов 20 включения и детектора 13 металла. Имеется линия 60 связи с транспортным средством 5.
Транспортное средство 5 оснащено устройством 24 управления, которое содержит приемный аппарат 8 с антенной 6. Это устройство 24 управления обрабатывает переданные от полевого измельчителя 1 сигналы и на основе данных скорости движения генерирует в устройстве 32 управления приводом опорную величину для привода 30 хода и в устройстве 42 управления рулевой системой опорную величину для системы 40 рулевого управления. В зависимости от установки переключателя 25 привод 30 хода регулируется либо в соответствии с заданной от устройства 32 управления опорной величиной скорости, либо в соответствии с ручной установкой, например, педали 31 газа. Регулирование системы 40 рулевого управления также производится в зависимости от установки переключателя 25 либо по величине, предварительно заданной от устройства 42 управления, либо по величине, заданной, например, установкой руля 41.
Реферат
Изобретения относятся к сельскому хозяйству и могут быть использованы для оптимизации перегрузки убранной массы от уборочной машины на транспортное средство. На уборочной машине находится по меньшей мере одно устройство управления для генерирования управляющих сигналов и передающее устройство для передачи управляющих сигналов на транспортное средство. На транспортном средстве предусмотрено устройство для приема управляющих сигналов и по меньшей мере одно устройство регулирования для автоматической настройки скорости движения и/или угла направления движения в зависимости от управляющих сигналов. На основе данных режима работы уборочной машины и возможных управляющих сигналов обеспечивается существенное улучшение и оптимизация перегрузки убранной массы от уборочной машины в транспортное средство. 2 н. и 14 з.п. ф-лы, 3 ил.
Комментарии