Способ автоматического изменения направления сельскохозяйственной машины, система для автоматического изменения направления сельскохозяйственной машины и их применение - RU2778692C1
Код документа: RU2778692C1
Чертежи
Описание
Область техники
Настоящее изобретение относится к области автоматического управления сельскохозяйственными машинами, и, в частности, оно относится к способу автоматического изменения направления сельскохозяйственной машины, системе для автоматического изменения направления сельскохозяйственной машины и их применению.
Предпосылки изобретения
Ввиду развития навигационных систем становится возможным автоматическое управление. Сегодня полностью автоматическое передвижение по поверхности все еще остается нерешенной задачей, и функция высокоавтоматизированного управления машиной в основном все еще применяется в качестве вспомогательной функции. Тем не менее в области сельскохозяйственной техники, поскольку обработка почвы с помощью традиционной сельскохозяйственной техники требует расхода сравнительно большого количества человеческих и материальных ресурсов и в области сельского хозяйства для автоматического передвижения по поверхности не нужно настолько учитывать множество факторов, как при обычном передвижении по поверхности, при этом к передвижению с учетом сравнительно меньшего числа препятствующих факторов сюда относят и поведение при обработке, то автоматическое управление характеризуется стремительным развитием.
В современных сельскохозяйственных машинах в большинстве случаев применяется модель передвижения по прямой линии. Однако площадь сельскохозяйственного поля ограничена, и сельскохозяйственная машина после прохождения определенного расстояния должна изменить направление и продолжать обработку. В случае сельскохозяйственной машины, передвигающейся по прямой линии, изменение направления является движением высшей степени сложности, и обычно сельскохозяйственной машиной управляет специальный оператор на краю поля, который изменяет направление вручную.
Изменение направления и обычный поворот не являются одним и тем же. Когда на пути движения сельскохозяйственной машины вперед встречаются препятствия, то небольшим поворотом рулевого колеса можно легко обойти препятствие или непосредственно преодолеть препятствие, тогда как изменение направления в случае обычного поворота является более сложным, поэтому то, как обеспечивается автоматическое изменение направления сельскохозяйственной машины, является ключевым этапом в автоматическом управлении сельскохозяйственной машиной и в обработке с помощью нее.
Суть изобретения
Одна цель настоящего изобретения заключается в предоставлении способа автоматического изменения направления сельскохозяйственной машины, системы для автоматического изменения направления сельскохозяйственной машины и их применения, при этом с помощью указанного способа автоматического изменения направления сельскохозяйственной машины можно выполнять автоматическое изменение направления сельскохозяйственной машины на участке обработки.
Другая цель настоящего изобретения заключается в предоставлении способа автоматического изменения направления сельскохозяйственной машины, системы для автоматического изменения направления сельскохозяйственной машины и их применения, при этом указанная система для автоматического изменения направления сельскохозяйственной машины выполнена с возможностью автоматического планирования маршрута в зависимости от окружающей среды, чтобы создавать условия для автоматического изменения направления.
Другая цель настоящего изобретения заключается в предоставлении способа автоматического изменения направления сельскохозяйственной машины, системы для автоматического изменения направления сельскохозяйственной машины и их применения, при этом указанная система для автоматического изменения направления сельскохозяйственной машины выполнена с возможностью автоматического определения того, необходимо ли или нет изменить направление.
Другая цель настоящего изобретения заключается в предоставлении способа автоматического изменения направления сельскохозяйственной машины, системы для автоматического изменения направления сельскохозяйственной машины и их применения, при этом соответствующий пользователь посредством оконечного устройства может осуществлять мониторинг рабочего маршрута сельскохозяйственной машины, снабженной указанной системой для автоматического изменения направления сельскохозяйственной машины, и может управлять сельскохозяйственной машиной в реальном времени.
В одном аспекте настоящего изобретение согласно настоящему изобретению предложен способ автоматического изменения направления сельскохозяйственной машины, при этом указанный способ автоматического изменения направления сельскохозяйственной машины включает этапы, на которых:
после получения установленной команды изменить направление в устройство управления сельскохозяйственной машиной посредством обрабатывающего устройства направляют команду снизить скорость с управлением снижением скорости указанной сельскохозяйственной машины, при этом указанная сельскохозяйственная машина расположена на одном пути обработки на участке обработки, при этом указанный участок обработки содержит по меньшей мере два пути обработки и перемещающейся по одному пути обработки указанной сельскохозяйственной машине необходимо выполнить поворот для перехода на следующий путь обработки;
после снижения скорости указанной сельскохозяйственной машины до заданного значения в указанное устройство управления указанной сельскохозяйственной машины посредством указанного обрабатывающего устройства направляют команду выполнить поворот с управлением поворотом указанной сельскохозяйственной машины; и
после поворота указанной сельскохозяйственной машины с ее переходом на новый путь обработки указанную сельскохозяйственную машину выравнивают с обеспечением возможности продолжения обработки указанной сельскохозяйственной машиной по новому пути обработки.
Согласно одному варианту осуществления настоящего изобретения в этом способе в процессе поворота посредством указанного устройства управления управляют поднятием рабочего органа указанной сельскохозяйственной машины и после перехода на новый путь обработки управляют возвращением указанного рабочего органа в прежнее положение.
Согласно одному варианту осуществления настоящего изобретения указанный способ автоматического изменения направления сельскохозяйственной машины дополнительно включает этапы, на которых:
после поворота указанной сельскохозяйственной машины на установленный угол в указанное устройство управления указанной сельскохозяйственной машины посредством указанного обрабатывающего устройства направляют команду на ускорение с управлением ускорением поворота указанной сельскохозяйственной машины.
Согласно одному варианту осуществления настоящего изобретения в этом способе на основании двух рабочих положений и двух концов в пределах указанного участка обработки устанавливают путь обработки указанной сельскохозяйственной машиной.
Согласно одному варианту осуществления настоящего изобретения указанный способ автоматического изменения направления сельскохозяйственной машины дополнительно включает этапы, на которых:
на основании маршрута прохождения указанной сельскохозяйственной машины, заключающегося в ее перемещении по прямой линии в пределах указанного участка обработки, соответственно устанавливают два рабочих положения с установкой направления движения по указанному пути обработки; и
управляют перемещением указанной сельскохозяйственной машины к одному концу указанного пути обработки и изменением ее направления для перемещения к другому концу другого пути обработки с установкой концов пути обработки и последующей установкой пути обработки.
Согласно одному варианту осуществления настоящего изобретения в этом способе путем установки оператором вручную двух рабочих положений и двух концов устанавливают путь обработки.
Согласно одному варианту осуществления настоящего изобретения в этом способе на основании данных об изменении положения указанной сельскохозяйственной машины, полученных указанным обрабатывающим устройством, автоматически генерируют указанную установленную команду изменить направление.
В другом аспекте настоящего изобретения согласно настоящему изобретению предложена система для автоматического изменения направления сельскохозяйственной машины, при этом указанная система для автоматического изменения направления сельскохозяйственной машины содержит:
один приемный блок, при этом указанный приемный блок предназначен для получения информации, получаемой не от сельскохозяйственной машины, и информации, получаемой от сельскохозяйственной машины;
один блок обработки данных, при этом указанный блок обработки данных выполнен с возможностью генерирования заключения на основании информации, полученной указанным приемным блоком, при этом указанное заключение содержит скорость движения сельскохозяйственной машины и угол поворота сельскохозяйственной машины; и
один блок управления, при этом указанный блок управления выполнен с возможностью управления скоростью движения и углом поворота указанной сельскохозяйственной машины на основании заключения, сгенерированного указанным блоком обработки данных, с обеспечением поворота указанной сельскохозяйственной машины в конце одного пути обработки на участке обработки и ее перемещением на следующий путь обработки.
Согласно одному варианту осуществления настоящего изобретения после получения указанным приемным блоком одной установленной команды изменить направление указанный блок обработки данных выполнен с возможностью следующего: направления сначала команды снизить скорость в указанный блок управления со снижением скорости указанной сельскохозяйственной машины до заданного значения; последующего направления команды выполнить поворот в указанный блок управления с изменением направления перемещения указанной сельскохозяйственной машины до нужного.
Согласно одному варианту осуществления настоящего изобретения указанная сельскохозяйственная машина выполнена с возможностью осуществления поворота под управлением указанного блока управления, при этом указанный блок обработки данных выполнен с возможностью направления команды на ускорение в указанный блок управления для ускорения поворота указанной сельскохозяйственной машины.
Согласно одному варианту осуществления настоящего изобретения указанная система для автоматического изменения направления сельскохозяйственной машины дополнительно содержит один блок планирования маршрута, при этом указанный блок планирования маршрута с возможностью передачи данных связан с указанным приемным блоком и выполнен с возможностью установки пути обработки на основании двух рабочих положений на маршруте передвижения указанной сельскохозяйственной машины в пределах указанного участка обработки и двух краев в пределах указанного участка обработки, полученных указанным приемным блоком.
Согласно одному варианту осуществления настоящего изобретения указанный приемный блок встроен в оконечное портативное устройство, при этом указанное оконечное устройство предоставлено оператору для эксплуатации указанной сельскохозяйственной машины.
В другом аспекте настоящего изобретения согласно настоящему изобретению предложено оконечное устройство, предназначенное для управления по меньшей мере одной сельскохозяйственной машиной, при этом указанное оконечное устройство содержит:
по меньшей мере один приемный блок, при этом указанный приемный блок предназначен для получения информации, получаемой не от сельскохозяйственной машины, и информации, получаемой от сельскохозяйственной машины; и
один блок обработки данных, при этом указанный блок обработки данных выполнен с возможностью генерирования заключения на основании информации, полученной указанным приемным блоком, при этом указанное заключение содержит скорость движения сельскохозяйственной машины и угол поворота сельскохозяйственной машины, и отправки указанного заключения в один блок управления указанной сельскохозяйственной машины; указанный блок управления выполнен с возможностью управления скоростью движения и углом поворота указанной сельскохозяйственной машины на основании заключения, сгенерированного указанным блоком обработки данных, с обеспечением поворота указанной сельскохозяйственной машины в конце одного пути обработки на участке обработки и ее перемещением на следующий путь обработки.
В другом аспекте настоящего изобретения согласно настоящему изобретению предложена сельскохозяйственная машина, снабженная системой для автоматического изменения направления сельскохозяйственной машины и содержащая:
основную часть сельскохозяйственной машины; и
систему для автоматического изменения направления сельскохозяйственной машины, при этом указанная основная часть сельскохозяйственной машины содержит ходовую часть, один узел привода, один блок поворота, рабочий орган и один блок управления; указанный рабочий орган и указанная ходовая часть с возможностью приведения в движение соответственно соединены с указанным узлом привода; указанный блок поворота, указанная ходовая часть, указанный узел привода и указанный рабочий орган соответственно с возможностью управления связаны с указанным блоком управления, при этом указанная система для автоматического изменения направления сельскохозяйственной машины содержит один приемный блок и один блок обработки данных, при этом указанный приемный блок предназначен для получения информации, получаемой не от сельскохозяйственной машины, и информации, получаемой от сельскохозяйственной машины, при этом указанный блок обработки данных выполнен с возможностью генерирования заключения на основании информации, полученной указанным приемным блоком, при этом указанное заключение содержит скорость движения сельскохозяйственной машины и угол поворота сельскохозяйственной машины, при этом указанный блок управления выполнен с возможностью управления указанной ходовой частью и указанным блоком поворота указанной сельскохозяйственной машины на основании заключения, сгенерированного указанным блоком обработки данных, с обеспечением поворота указанной сельскохозяйственной машины в конце одного пути обработки на участке обработки и ее перемещением на следующий путь обработки.
Описание прилагаемых графических материалов
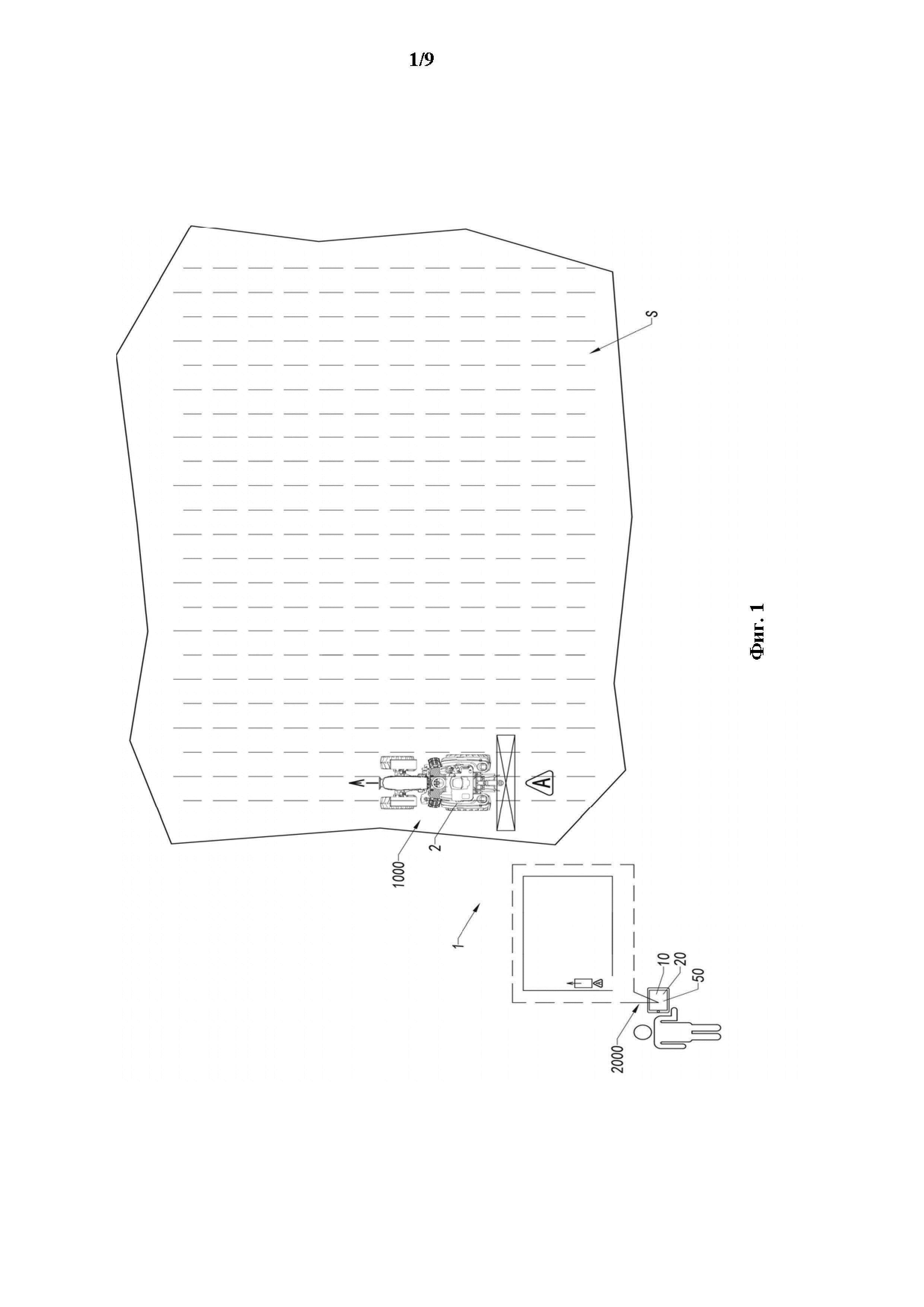
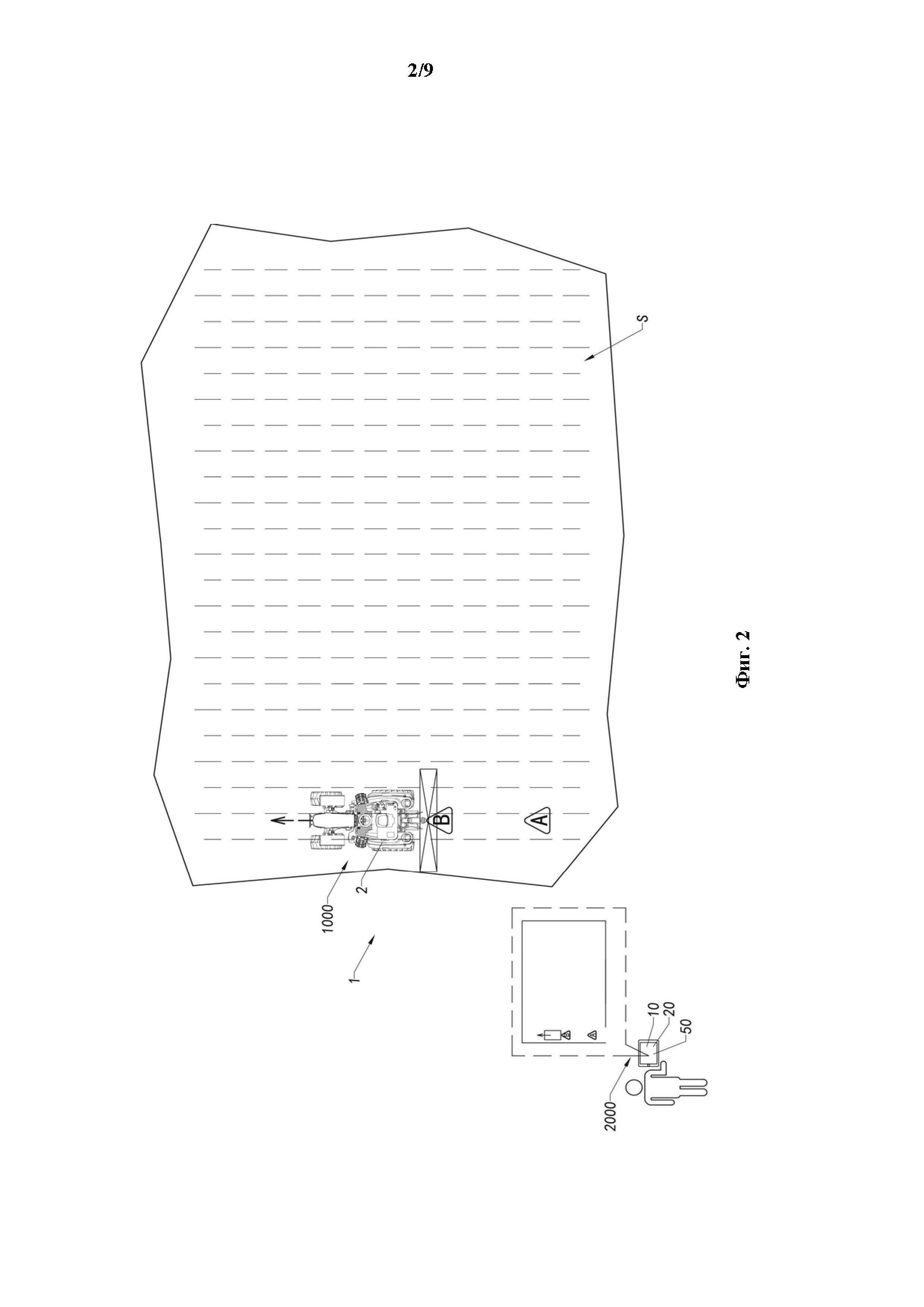
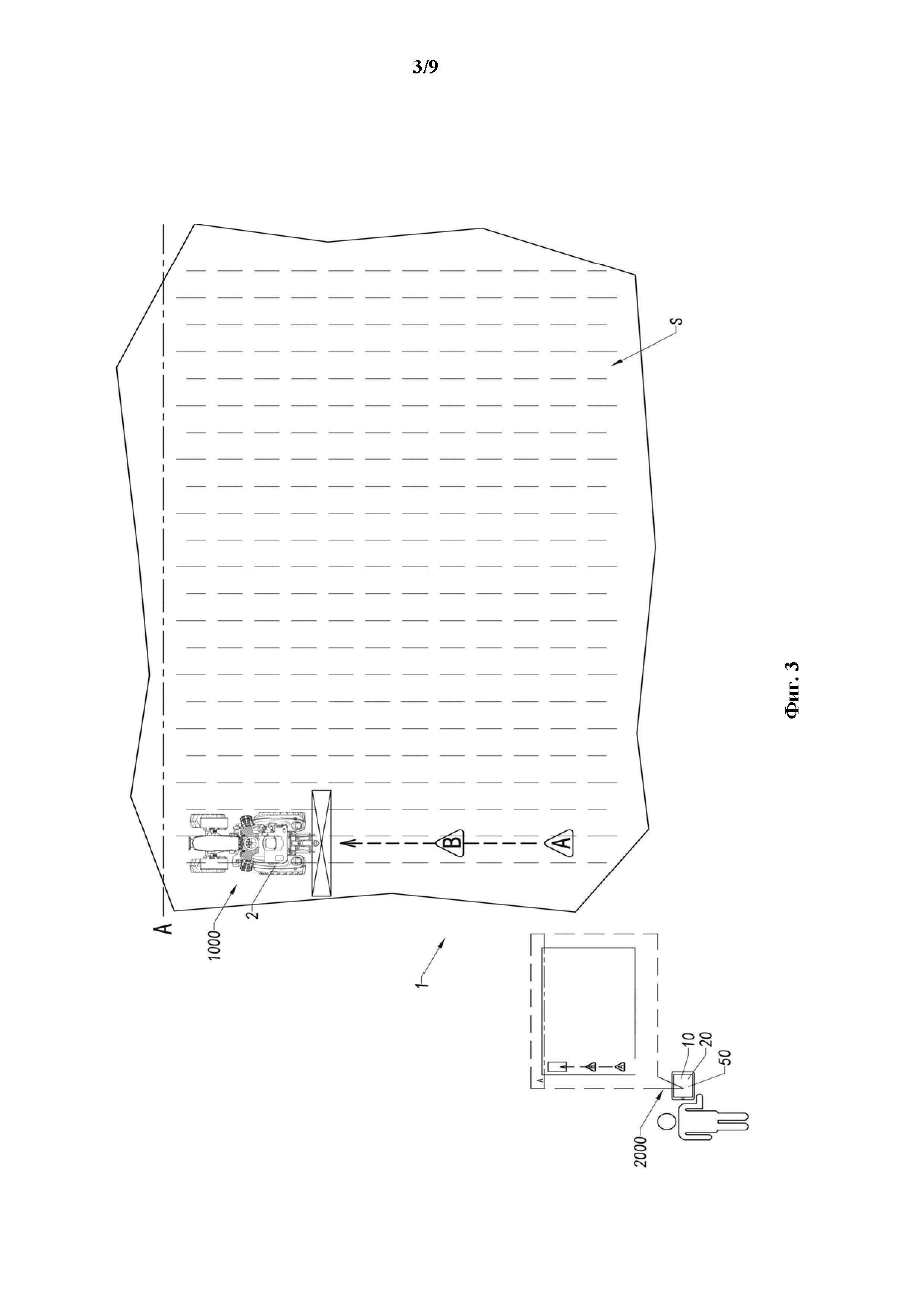
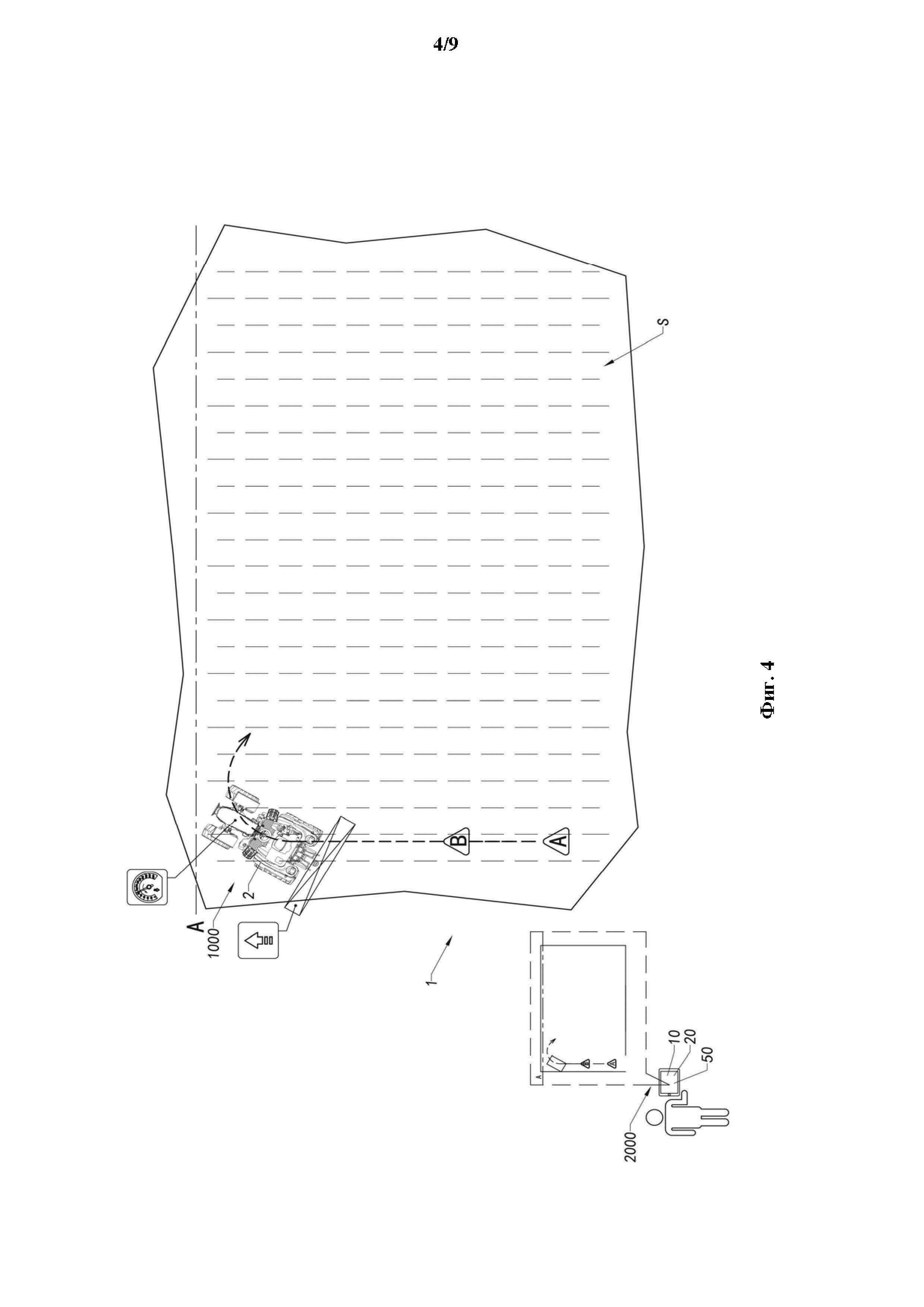
На фиг. 1–7 соответственно представлены схематические изображения применения способа автоматического изменения направления сельскохозяйственной машины согласно одному предпочтительному варианту осуществления настоящего изобретения.
На фиг. 8 представлена блок-схема способа автоматического изменения направления сельскохозяйственной машины согласно одному предпочтительному варианту осуществления настоящего изобретения.
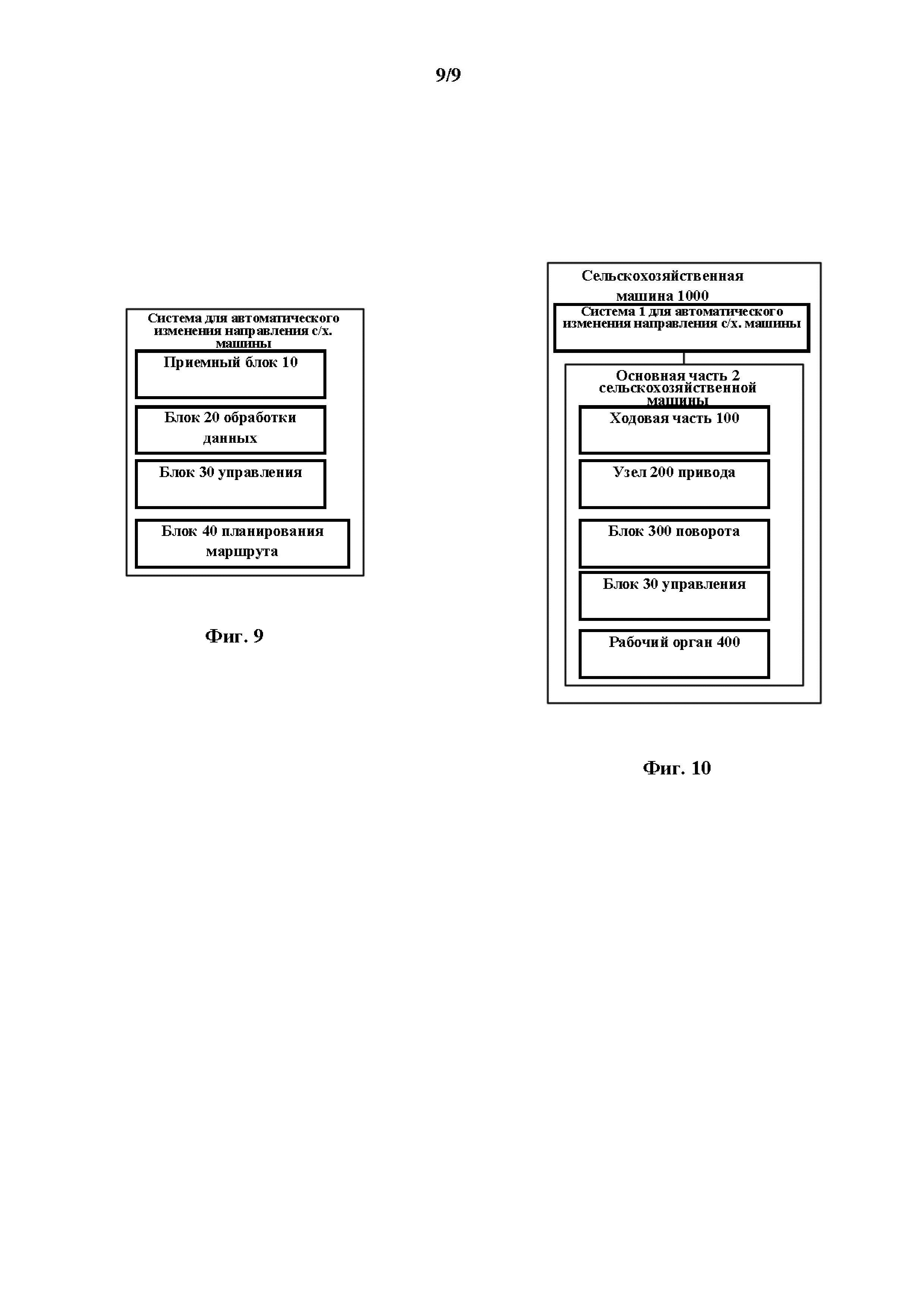
На фиг. 9 представлена структурная схема системы для автоматического изменения направления сельскохозяйственной машины согласно одному предпочтительному варианту осуществления настоящего изобретения.
На фиг. 10 представлена структурная схема сельскохозяйственной машины, снабженной системой для автоматического изменения направления сельскохозяйственной машины, согласно одному предпочтительному варианту осуществления настоящего изобретения.
Конкретные способы осуществления
Нижеприведенное описание предназначено для раскрытия настоящего изобретения, чтобы специалисты в данной области техники могли осуществить настоящее изобретение. Предпочтительные варианты осуществления в нижеприведенном описании представлены исключительно в качестве примера, и специалистам в данной области техники могут быть совершенно очевидны другие модификации касательно них. Основные принципы настоящего изобретения, определенные в нижеприведенном описании, могут быть использованы в других решениях, касающихся осуществления, решениях, касающихся изменений, решениях, касающихся модификаций, и эквивалентных решениях, а также в других технических решениях, в которых нет отступления от сути и объема настоящего изобретения.
Специалистам в данной области техники следует понимать, что отношения направления или расположения, которые в описании настоящего изобретения указаны словами и словосочетаниями « продольное направление», «поперечное направление», «над», «под», «перед», «за», «влево», «вправо», «вертикально», «горизонтально», «вверху», «внизу», «внутри», «снаружи» и т. п., представляют собой отношения направления или расположения, которые основаны на показанном в прилагаемых графических материалах и которые используются только для удобства описания настоящего изобретения и для упрощения описания, но не для указания или наведения на мысль касательно того, что указанные устройства или элементы должны быть расположены в конкретном положении, быть выполнены и работать в конкретном положении, поэтому вышеуказанные слова и словосочетания нельзя понимать как ограничивающие настоящее изобретение.
Разумеется, слово «один» следует понимать как «по меньшей мере один» или «один или несколько», то есть в одном варианте осуществления количество одного элемента может составлять один, тогда как в других вариантах осуществления может быть несколько таких элементов, поэтому слово «один» нельзя понимать как ограничение количества.
Со ссылками на фиг. 1 и фиг. 7 рассмотрен способ автоматического изменения направления сельскохозяйственной машины согласно одному предпочтительному варианту осуществления настоящего изобретения.
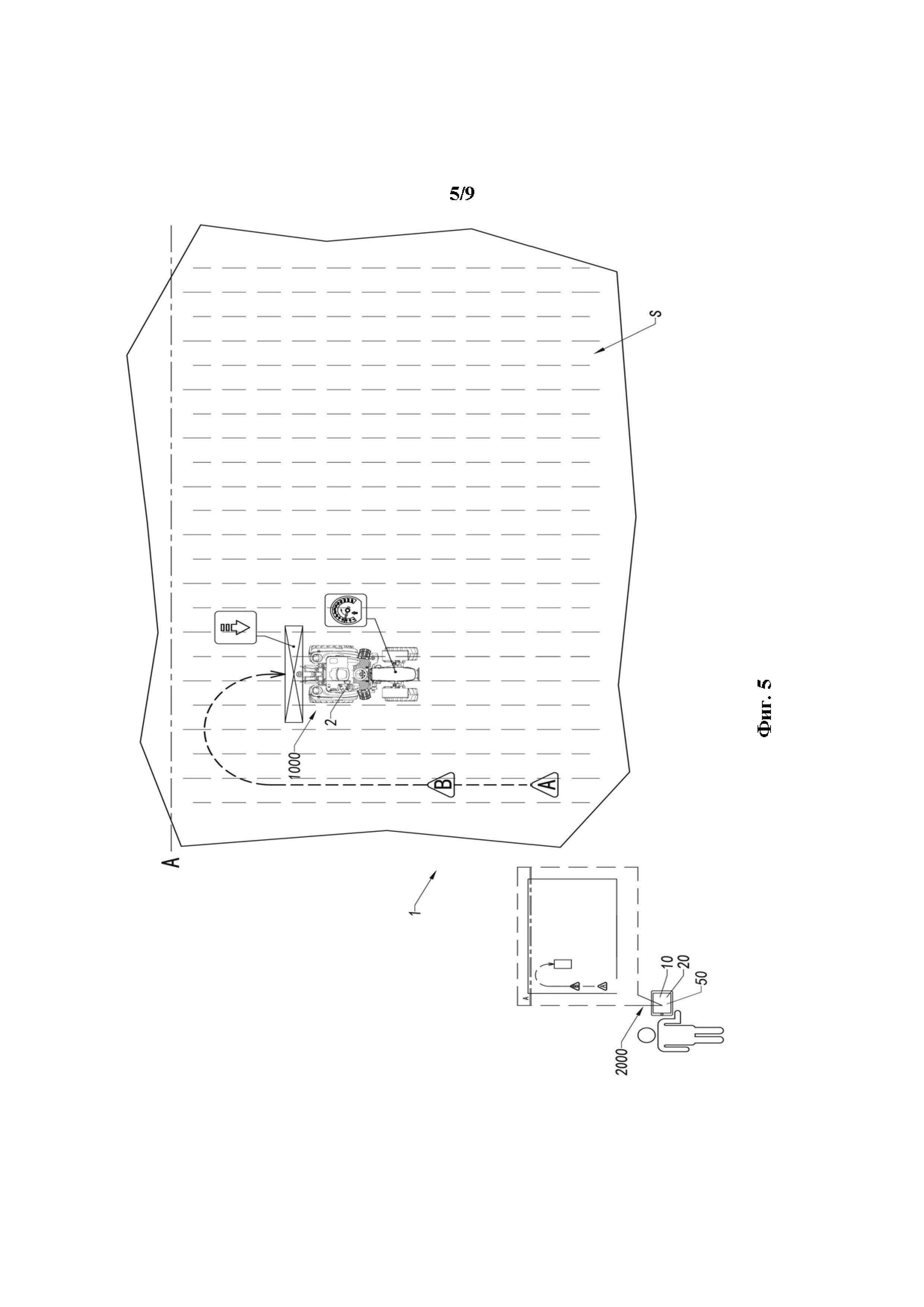
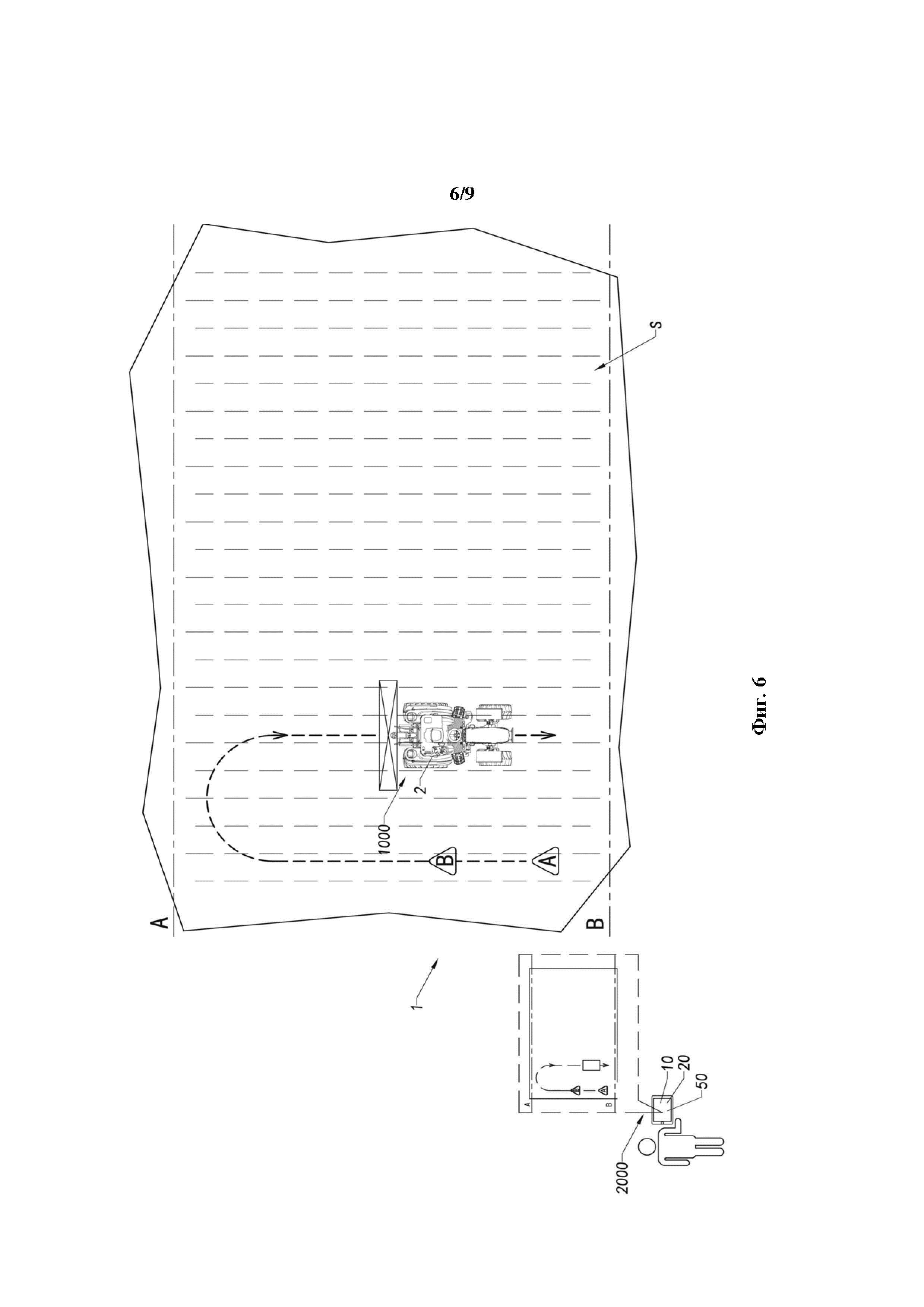
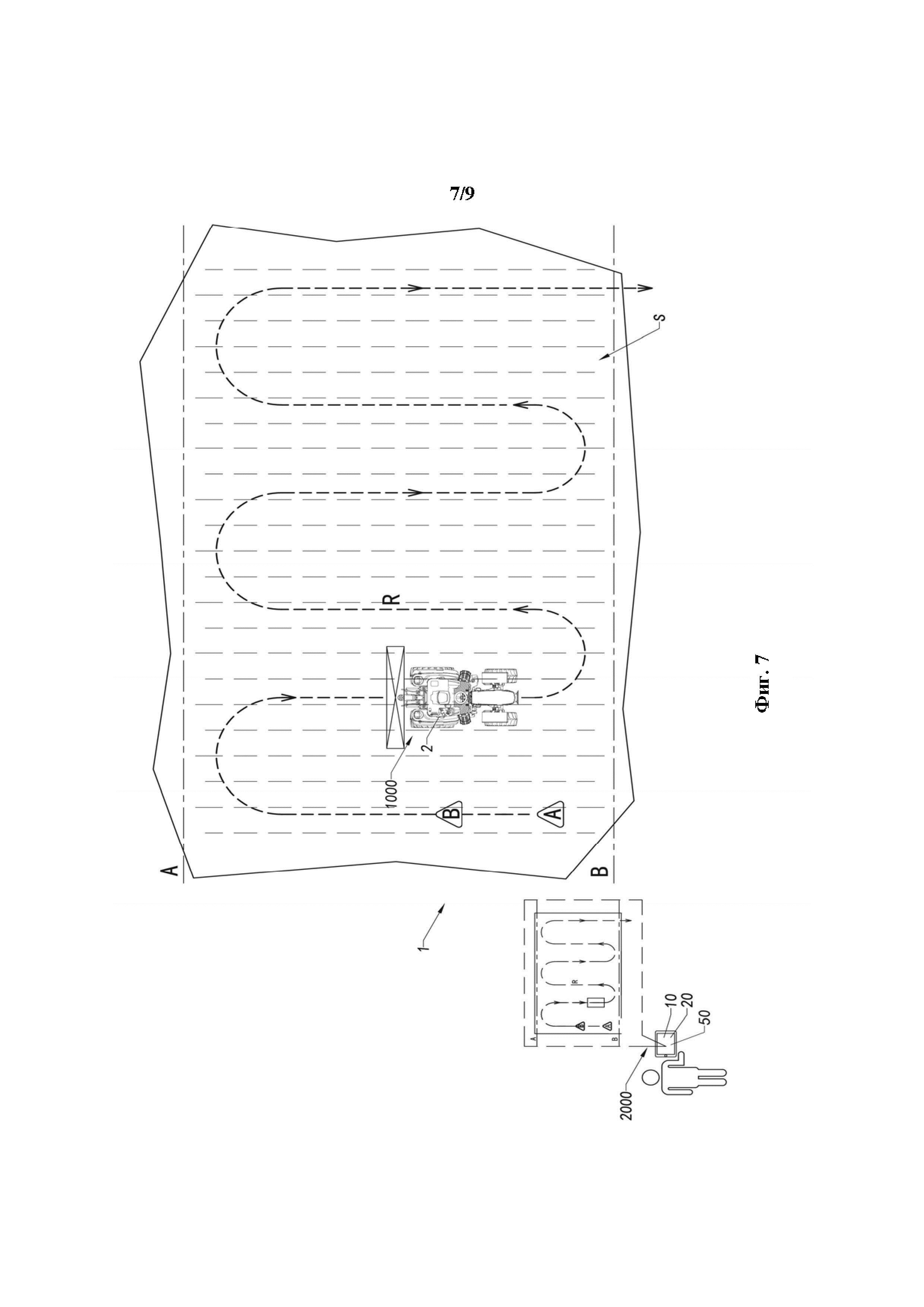
С помощью указанного способа автоматического изменения направления сельскохозяйственной машины сельскохозяйственная машина может выполнять автоматическое изменение направления в пределах участка обработки s для выполнения автоматического передвижения в пределах указанного участка обработки s. Следует отметить, что указанная сельскохозяйственная машина также может выполнять автоматическое изменение направления, даже когда указанная сельскохозяйственная машина перемещается на другой участок обработки s для его обработки.
В частности, указанный способ автоматического изменения направления сельскохозяйственной машины включает этапы, на которых:
устанавливают рабочий маршрут в пределах указанного участка обработки s; и
управляют указанной сельскохозяйственной машиной для автоматического изменения направления на краю указанного участка обработки s с переходом от пути обработки R к следующему пути обработки R.
В этом варианте осуществления для установки указанного рабочего маршрута в пределах указанного участка обработки s может применяться следующий подход: сначала, когда указанная сельскохозяйственная машина первый раз входит на указанный участок обработки s и управляют перемещением указанной сельскохозяйственной машины по прямой, то сперва устанавливают положение A, затем, после того как указанная сельскохозяйственная машина проходит положение A и перемещается вперед по прямой на определенное расстояние, устанавливают положение B и путем построения прямой линии между двумя точками для указанной сельскохозяйственной машины устанавливают путь обработки R в пределах указанного участка обработки s. Разумеется, с применением такого подхода в пределах указанного участка обработки s может быть автоматически установлено несколько других путей обработки R, параллельных указанному пути обработки R.
Когда указанная сельскохозяйственная машина продолжает перемещаться по прямой к одному краю указанного участка обработки s, то ее местонахождение устанавливают как границу поля A; затем указанная сельскохозяйственная машина в области границы поля A может автоматически изменить направление и продолжать перемещаться к другому краю указанного участка обработки s по следующему пути обработки R, при этом ее местонахождение устанавливают как границу поля B, и с применением такого подхода можно устанавливать указанный рабочий маршрут указанной сельскохозяйственной машины в пределах указанного участка обработки s.
Разумеется, указанный рабочий маршрут указанной сельскохозяйственной машины в пределах указанного участка обработки s может устанавливаться автоматически и также может устанавливаться вручную. Например, пределы указанного участка обработки s могут быть установлены с применением спутниковой карты, после чего для указанной сельскохозяйственной машины автоматически планируется рабочий маршрут; также оператор может управлять указанной сельскохозяйственной машиной с ее перемещением по кругу по краям указанного участка обработки s, после чего для указанной сельскохозяйственной машины на основании предварительно установленной последовательности автоматически планируется рабочий маршрут.
В этом варианте осуществления указанная сельскохозяйственная машина автоматически перемещается по указанному участку обработки s, и оператор может отслеживать положение указанной сельскохозяйственной машины в пределах указанного участка обработки s посредством оконечного устройства, при этом по мере перемещения указанной сельскохозяйственной машины в пределах указанного участка обработки s координаты указанной сельскохозяйственной машины будут поступать в реальном времени и отображаться в указанном оконечном устройстве; оператор может выставить на отображаемом маршруте прохождения указанной сельскохозяйственной машины точку с получением положения A, через определенный промежуток от положения A, составляющий, например, расстояние в 5 метров, выставить на маршруте другую точку с получением положения B и таким образом установить для указанной сельскохозяйственной машины прямолинейный путь обработки R.
Кроме того, когда указанная сельскохозяйственная машина перемещается к месту вблизи края указанного рабочего участка, оператор может установить в указанном оконечном устройстве границу поля A, и указанная граница поля A является прямой линией, что означает, что указанная сельскохозяйственная машина изменит направление в прямолинейной указанной области границы поля A независимо от того, двигается ли она по указанному пути обработки R или по следующему пути обработки R. Указанная сельскохозяйственная машина в указанной области границы поля A выполняет автоматическое изменение направления, затем переходит на следующий путь обработки R и продолжает перемещаться по прямой в направлении от указанной границы поля A. Когда указанная сельскохозяйственная машина перемещается к месту вблизи другого края указанного рабочего участка, оператор может установить в указанном оконечном устройстве границу поля B, и указанная граница поля B является прямой линией, что означает, что указанная сельскохозяйственная машина изменит направление в прямолинейной указанной области границы поля B независимо от того, двигается ли она по указанному пути обработки R или по следующему пути обработки R.
Следует отметить, что на начальном этапе можно управлять указанной сельскохозяйственной машиной с ее перемещением вдоль одного края указанного участка обработки s, и положение A может быть установлено после перемещения указанной сельскохозяйственной машины в течение определенного периода времени и также может быть установлено в момент начала перемещения указанной сельскохозяйственной машины. Другими словами, положение A может быть начальным положением на пути обработки R и также может быть положением в некрайней точке указанного пути обработки R. Что касается оператора, то он может устанавливать положение A, как только сельскохозяйственная машина переходит на указанный участок обработки s, и также может устанавливать положение A после прохождения указанной сельскохозяйственной машины определенного расстояния.
Разумеется, является понятным то, что установка каждого указанного пути обработки R также может зависеть от спутниковой карты для автоматического составления плана для указанной сельскохозяйственной машины.
Кроме того, указанный этап изменения направления дополнительно включает этапы, на которых:
регулируют снижение скорости указанной сельскохозяйственной машины до предварительно заданного значения после получения команды изменить направление;
регулируют поворот рулевого колеса указанной сельскохозяйственной машины до предварительно заданного значения;
регулируют ускорение указанной сельскохозяйственной машины до предварительно заданного значения до ее перехода на другой путь обработки R; и
выравнивают рулевое колесо указанной сельскохозяйственной машины.
В частности, на указанном этапе изменения направления, если необходимо, чтобы указанная сельскохозяйственная машина изменила направление, а начальная скорость перемещения указанной сельскохозяйственной машины относительно высокая, то необходимо обеспечить снижение скорости и затем изменить направление, чем предотвращается увеличение степени сложности изменения направления, когда скорость движения слишком высокая.
Получение указанной команды изменить направление может выполняться обрабатывающим устройством, например электронным блоком управления, ECU, которое при получении команды от оператора может обеспечивать изменение направления указанной сельскохозяйственной машиной, а также может на основании данных, полученных от автоматической навигационной системы указанной сельскохозяйственной машины, автоматически отправлять команду выполнить изменение направления; например, автоматическая навигационная система указанной сельскохозяйственной машины определяет, что указанная сельскохозяйственная машина уже подходит к концу указанного пути обработки R для указанной сельскохозяйственной машины, и если не изменить направление, то она выйдет за пределы указанного участка обработки s. Что касается оператора, то он может контролировать момент изменения направления указанной сельскохозяйственной машины через приложение, предназначенное для контроля, в указанном оконечном устройстве, что очень удобно, а также, если указанная сельскохозяйственная машина встречает препятствие или возникают другие ситуации, которые невозможно контролировать, он может управлять указанной сельскохозяйственной машиной, чтобы изменить ее направление до того как, она достигнет границы поля.
Указанный электронный блок управления ECU после получения команды может отправлять в устройство управления, например в устройство управления машиной VCU, команду снизить скорость, если значение текущей скорости указанной сельскохозяйственной машины превышает предварительно установленное значение. Указанное устройство управления машиной VCU предназначено для регулирования снижения или увеличения скорости ходовой части указанной сельскохозяйственной машины. Указанное устройство управления машиной VCU может управлять педалью газа указанной сельскохозяйственной машины для регулирования вращения двигателя до заданного значения с обеспечением снижения скорости указанной сельскохозяйственной машины. Если скорость указанной сельскохозяйственной машины снижается до предварительно определенного значения, то указанный электронный блок управления ECU после получения обратной связи отправляет в указанное устройство управления машиной VCU команду поднять рабочий орган, чтобы рабочий орган указанной сельскохозяйственной машины при изменении направления прекратил обработку указанного участка обработки s. Если скорость указанной сельскохозяйственной машины не снизилась до предварительно определенного значения, то указанное устройство управления машиной VCU продолжает управлять педалью газа указанной сельскохозяйственной машины для регулирования вращения двигателя до заданного значения с обеспечением снижения скорости указанной сельскохозяйственной машины.
Указанное устройство управления машиной VCU одновременно с управлением подъемом рабочего органа указанной сельскохозяйственной машины также может управлять поворотом указанной сельскохозяйственной машины для изменения направления. Если значение поворота рулевого колеса указанной сельскохозяйственной машины достигло заданного значения, то это в качестве обратной связи отправляют в указанный электронный блок управления ECU, и указанный электронный блок управления ECU может направить в указанное устройство управления машиной VCU команду на ускорение. Если значение поворота рулевого колеса указанной сельскохозяйственной машины не достигло заданного значения, то указанное устройство управления машиной VCU продолжает регулировать значение поворота указанного рулевого колеса, пока оно не достигнет заданного значения.
Команда, направляемая указанным электронным блоком управления ECU, отправляется в указанное устройство управления машиной VCU, и указанное устройство управления машиной VCU управляет педалью газа указанной сельскохозяйственной машины для регулирования вращения двигателя до заданного значения, чтобы указанная сельскохозяйственная машина начала ускоряться и изменила направление.
На основании получаемой в реальном времени информации о местоположении указанной сельскохозяйственной машины указанный электронный блок управления ECU может отслеживать, на каком пути обработки R указанная сельскохозяйственная машина находится в текущий момент. Если указанная сельскохозяйственная машина уже перешла от указанного пути обработки R к следующему пути обработки R, то указанный электронный блок управления ECU направляет в указанное устройство управления машиной VCU управляющую команду, чтобы указанное устройство управления машиной VCU управляло выравниванием указанного рулевого колеса, в результате чего указанная сельскохозяйственная машина сможет перемещаться по прямой по новому пути обработки R.
Кроме того, после перехода указанной сельскохозяйственной машины на новый путь обработки R указанный электронный блок управления ECU может направлять в указанное устройство управления машиной VCU команду опустить рабочий орган указанной сельскохозяйственной машины в его обычное рабочее положение. Разумеется, при изменении направления указанной сельскохозяйственной машины, если указанный рабочий орган будет мешать изменить направление, то указанный рабочий орган может быть поднят; например, может быть необходимо поднять несколько рабочих органов, которые при обработке необходимо опустить до земли. Если указанный рабочий орган не будет мешать в ходе всего процесса изменения направления, то положение указанного рабочего органа не обязательно нужно будет регулировать. Кроме того, следует отметить, что рабочий орган указанной сельскохозяйственной машины не обязательно необходимо время от времени поднимать и просто иногда останавливать его работу, чем можно уменьшить уровень помех на этапе изменения направления.
Разумеется, указанное устройство управления машиной VCU при управлении поворотом указанной сельскохозяйственной машины не обязательно непосредственно управляет рулевым колесом указанной сельскохозяйственной машины, и оно также может управлять системой рулевого управления внутри указанной сельскохозяйственной машины; естественно, оно также может имитировать реального оператора и с помощью внешнего оборудования непосредственно управлять рулевым колесом указанной сельскохозяйственной машины.
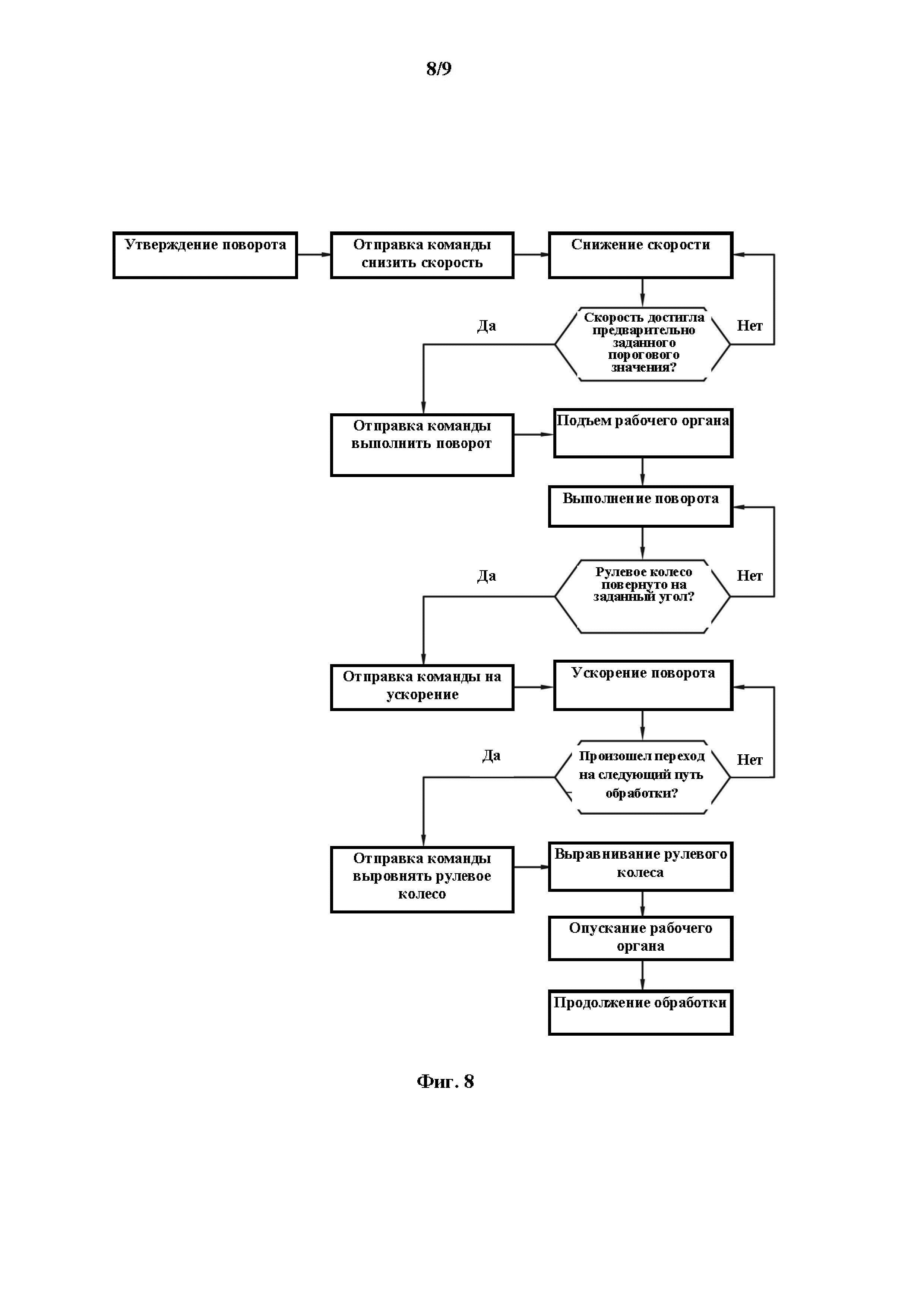
Со ссылкой на фиг. 8 рассмотрен конкретный способ осуществления указанного способа изменения направления сельскохозяйственной машины согласно настоящему изобретению.
Указанный способ изменения направления сельскохозяйственной машины может быт выполнен следующим образом: предпочтительно посредством приложения APP на указанном оконечном устройстве устанавливают изменение направления, затем в указанный электронный блок управления ECU отправляют команду снизить скорость, и указанное устройство управления машиной VCU выполняет конкретную операцию.
В частности, указанное устройство управления машиной VCU управляет снижением скорости указанной ходовой части указанной сельскохозяйственной машины до достижения заданного значения, затем отправляет обратную связь в указанный электронный блок управления ECU. Указанный электронный блок управления ECU затем направляет в указанное устройство управления машиной VCU команду изменить направление, и указанное устройство управления машиной VCU управляет поднятием рабочего органа указанной сельскохозяйственной машины и затем управляет поворотом рулевого колеса с регулированием поворота рулевого колеса до заданного значения, после чего отправляет обратную связь в указанный электронный блок управления ECU. Указанный электронный блок управления ECU затем направляет в указанное устройство управления машиной ECU команду на ускорение, и указанное устройство управления машиной VCU управляет ускорением указанной ходовой части указанной сельскохозяйственной машины до достижения заданного значения; в процессе этого рулевое колесо сохраняет угол поворота, а рабочий орган остается в поднятом положении.
Указанный электронный блок управления ECU на основании данных касательно указанного участка обработки s и текущего местоположения указанной сельскохозяйственной машины определяет, перешла ли или нет указанная сельскохозяйственная машина на следующий путь обработки R, и если перешла, то прекращает изменять направление. Указанное устройство управления машиной VCU может управлять выравниванием рулевого колеса указанной сельскохозяйственной машины до начального положения, чтобы указанная сельскохозяйственная машина могла продолжать перемещаться по новому пути обработки R по прямой линии. После выравнивания рулевого колеса указанной сельскохозяйственной машины оно также может управлять рабочим органом указанной сельскохозяйственной машины для его возвращения в начальное положение, в результате чего указанная сельскохозяйственная машина может продолжать работать в пределах указанного участка обработки s.
Указанная сельскохозяйственная машина при изменении направления в указанной области границы поля A после перехода на следующий путь обработки R может снова изменить направление в области границы поля B на новом пути обработки R, и с применением такого подхода может осуществить обработку всего указанного участка обработки s.
Следует отметить, что установка ожидаемых скорости управления и угла поворота в процессе изменения направления указанной сельскохозяйственной машины может быть выполнена на основании получаемой ею команды изменить направление и текущих соответствующих параметров указанной сельскохозяйственной машины и указанного участка обработки s.
Например, если ширина отдельного пути обработки R указанного участка обработки s сравнительно небольшая, то в процессе изменения направления угол поворота указанной сельскохозяйственной машины необходимо регулировать так, чтобы он был сравнительно небольшим, иначе очень легко сбиться с указанного пути обработки R. Например, указанная сельскохозяйственная машина сначала осуществляет обработку по первому пути обработки R; при изменении направления, поскольку величина поворота слишком большая, она может сразу перейти на третий путь обработки R, в результате чего пропустит второй путь обработки R, расположенный между первым путем обработки R и третьим путем обработки R.
Например, если конструкция указанной сельскохозяйственной машины сравнительно большая и если скорость перемещения указанной сельскохозяйственной машины сравнительно высокая, то в процессе изменения направления скорость указанной сельскохозяйственной машины необходимо сравнительно быстро регулировать, чтобы скорость указанной сельскохозяйственной машины во время поворота была сравнительно небольшой.
Следует отметить, что указанный путь обработки R на указанном участке обработки s совсем не обязательно должен быть прямой линией, и маршрут в виде указанного пути обработки R может быть выбран или установлен согласно требованиям, например в виде кривой линии.
Кроме того, как показано на фиг. 9, в другом аспекте настоящего изобретения согласно настоящему изобретению предложена система 1 для автоматического изменения направления сельскохозяйственной машины, при этом указанная система 1 для автоматического изменения направления сельскохозяйственной машины содержит один приемный блок 10, один блок 20 обработки данных и один блок 30 управления, при этом указанный приемный блок 10 с возможностью передачи данных связан с указанным блоком 20 обработки данных, а указанный блок 20 обработки данных с возможностью передачи данных связан с указанным блоком 30 управления.
Указанный приемный блок 10 предназначен для приема внешней информации или внутренней информации, поступающей от указанной сельскохозяйственной машины; указанный блок 20 обработки данных на основании информации, полученной указанным приемным блоком 10, генерирует команду; указанный блок 30 управления на основании команды, сгенерированной указанным блоком 20 обработки данных, управляет работой или передвижением указанной сельскохозяйственной машины.
В частности, при необходимости изменить направление указанной сельскохозяйственной машины указанный приемный блок 10 принимает команду изменить направление и передает ее в указанный блок 20 обработки данных; указанный блок 20 обработки данных на основании информации, полученной указанным приемным блоком 10, которая может содержать указанную команду изменить направление, информацию касательно параметров самой указанной сельскохозяйственной машины и информацию касательно параметров указанного участка обработки s, получает заключение, при этом указанное заключение может содержать скорость передвижения указанной сельскохозяйственной машины и угол поворота рулевого колеса указанной сельскохозяйственной машины, с отправкой указанного заключения в указанный блок 30 управления. Указанный блок 30 управления на основании соответствующих скорости передвижения указанной сельскохозяйственной машины и угла поворота рулевого колеса указанной сельскохозяйственной машины, полученных указанным блоком 20 обработки данных, управляет указанной сельскохозяйственной машиной, чтобы указанная сельскохозяйственная машина плавно изменила направление с переходом на следующий путь обработки R.
Следует отметить, что если угол поворота слишком большой, то указанная сельскохозяйственная машина при изменении направления может не перейти на необходимый путь обработки R, а если указанный угол поворота слишком мал, то может не быть возможности ухода с текущего пути обработки R, из-за чего будет невозможно осуществлять обработку по новому пути обработки R, поэтому необходимо своевременное регулирование угла поворота указанной сельскохозяйственной машины.
В этом варианте осуществления указанный приемный блок 10 в реальном времени посредством системы глобального позиционирования получает информацию о географическом положении в реальном времени, касающуюся указанной сельскохозяйственной машины, и если в процессе поворота направление движения указанной сельскохозяйственной машины не перейдет в пределы следующего пути обработки R, то указанная сельскохозяйственная машина будет продолжать осуществлять поворот, чтобы указанная сельскохозяйственная машина могла перейти на следующий путь обработки R.
Кроме того, указанный блок 20 обработки данных в реальном времени получает обратную связь от указанного приемного блока 10; указанный блок 20 обработки данных может сначала направлять в указанный блок 30 управления команду снизить скорость, затем после снижения скорости указанной сельскохозяйственной машины до установленного значения указанный приемный блок 10 отправляет обратную связь в указанный блок 20 обработки данных, и указанный блок 20 обработки данных может затем направлять в указанный блок 30 управления команду выполнить поворот и команду поднять рабочий орган, благодаря чему посредством указанного блока управления можно управлять поворотом указанной сельскохозяйственной машины и удерживать поднятым рабочий орган в процессе поворота. Затем после достижения углом поворота указанной сельскохозяйственной машины установленного значения указанный приемный блок 10 отправляет обратную связь в указанный блок 30 управления, благодаря чему можно регулировать ускорение поворота указанной сельскохозяйственной машины; затем, когда указанная сельскохозяйственная машина ускоряет поворот и переходит на следующий путь обработки R, указанный приемный блок 10 может отправлять обратную связь в указанный блок 20 обработки данных, и указанный блок 20 обработки данных может затем направлять в указанный блок 30 управления команду выравнивания, чтобы под управлением указанным блоком 30 управления можно было выравнивать поворачиваемую ходовую часть указанной сельскохозяйственной машины. Указанный блок 20 обработки данных также может затем направлять в указанный блок 30 управления команду выполнить обработку, чтобы указанная сельскохозяйственная машина после перехода на новый путь обработки R могла снова начать обработку.
Кроме того, указанная система 1 для автоматического изменения направления сельскохозяйственной машины дополнительно содержит один блок 40 планирования маршрута, при этом указанный блок 40 планирования маршрута предназначен для планирования маршрута передвижения указанной сельскохозяйственной машины в пределах указанного участка обработки s и тем самым указанного пути обработки R.
Разумеется, является понятным то, что указанный блок 40 планирования маршрута вовсе не является обязательным, и указанный приемный блок 10 может получать из статистических данных, касающихся указанного участка обработки s, соответствующие параметры указанного участка обработки s, благодаря чему указанный блок 20 обработки данных может автоматически планировать маршрут передвижения, а также может непосредственно получать из базы статистических данных, касающихся указанного участка обработки s, маршрут передвижения, основанный на передвижениях других сельскохозяйственных машин в пределах указанного участка обработки s.
В этом варианте осуществления посредством указанного приемного блока 10 получают информацию, и указанный блок 40 планирования маршрута генерирует путь обработки R, касающийся указанного участка обработки s и указанной сельскохозяйственной машины. Указанный блок 40 планирования маршрута с возможностью передачи данных связан соответственно с указанным приемным блоком 10 и указанным блоком 20 обработки данных.
Указанный приемный блок 10 может получать от оператора по меньшей мере два положения для выставления точек и два положения границ поля и отправлять их в указанный блок 40 планирования маршрута, чтобы указанный блок 40 планирования маршрута мог устанавливать по меньшей мере один путь обработки R и затем на основании размера всего указанного участка обработки s и объема обработки указанной сельскохозяйственной машиной мог устанавливать ширину указанного пути обработки R с установкой тем самым нескольких путей обработки R на указанном участке обработки s. Естественно, специалистам в данной области техники должно быть понятно, что рассмотренный здесь способ установки нескольких путей обработки R на указанном участке обработки s представлен исключительно в качестве примера. Определение размера всего указанного участка обработки s может быть непосредственно выполнено с применением устройства определения местоположения с использованием спутниковых навигационных систем, а также может быть выполнено, когда оператор управляет указанной сельскохозяйственной машиной с ее перемещением по кругу по краям указанного участка обработки s.
Разумеется, указанный приемный блок 10 может быть установлен в указанной сельскохозяйственной машине; указанный блок 20 обработки данных также может быть установлен в указанной сельскохозяйственной машине; естественно, указанный приемный блок 10 и указанный блок 20 обработки данных также могут находиться вне указанной сельскохозяйственной машины; например, указанный приемный блок 10 и указанный блок 20 обработки данных соответственно могут быть связаны с указанным блоком 30 управления с возможностью обеспечения удаленной связи, при этом указанный приемный блок 10 и указанный блок 20 обработки данных могут быть встроены в указанное оконечное устройство, и оператор посредством указанного оконечного устройства может отправлять команды указанной сельскохозяйственной машине.
В другом аспекте настоящего изобретения, как видно из фиг. 1–7, согласно настоящему изобретению предложено оконечное устройство 2000, при этом указанное оконечное устройство 2000 подходит для установки связи с указанной сельскохозяйственной машиной с возможностью передачи данных.
Указанное оконечное устройство 2000 может содержать по меньшей мере указанный приемный блок 10 и указанный блок 20 обработки данных; указанный приемный блок 10 получает информацию от указанной сельскохозяйственной машины и информацию касательно операций от оператора, и указанный блок 20 обработки данных на основании информации, полученной указанным приемным блоком 10, получает заключение и отправляет его в указанный блок 30 управления указанной сельскохозяйственной машины; указанный блок 30 управления подходит для управления указанной ходовой частью, блоком поворота и рабочими органами указанной сельскохозяйственной машины, чтобы указанная сельскохозяйственная машина плавно выполняла поворот.
Указанное оконечное устройство 2000 также может содержать один блок 50 отображения, при этом указанный приемный блок 10 и указанный блок 20 обработки данных с возможностью передачи данных связаны с указанным блоком 50 отображения; указанный блок 50 отображения может отображать информацию, полученную указанным приемным блоком 10, и также может отображать команду, направляемую указанным блоком 20 обработки данных в тот момент.
Разумеется, указанное оконечное устройство 2000 может быть оконечным портативным устройством, например мобильным телефоном, планшетом или другим устройством. Следует отметить, что посредством указанного оконечного устройства 2000 можно управлять не только одной сельскохозяйственной машиной, но и можно управлять несколькими сельскохозяйственными машинами, при этом указанные сельскохозяйственные машины могут относиться к разным типам. Тем не менее указанная сельскохозяйственная машина может вовсе не ограничиваться косилкой, сеялкой, посадочной машиной, опрыскивающей машиной и т. п.
В другом аспекте настоящего изобретения, как видно из фиг. 1–7, а также из фиг. 9 и фиг. 10, согласно настоящему изобретению предложена сельскохозяйственная машина 1000, снабженная указанной системой 1 для автоматического изменения направления сельскохозяйственной машины, при этом указанная сельскохозяйственная машина 1000 содержит основную часть 2 сельскохозяйственной машины и указанную систему 1 для автоматического изменения направления сельскохозяйственной машины, при этом указанная система 1 для автоматического изменения направления сельскохозяйственной машины установлена в указанной основной части 2 сельскохозяйственной машины; указанная основная часть 2 сельскохозяйственной машины может содержать ходовую часть 100, один узел 200 привода, один блок 300 поворота, один блок 30 управления и рабочий орган 400; указанная ходовая часть 100 предназначена для перемещения указанного узла 200 привода, указанного блока 300 поворота, указанного блока 30 управления и указанного рабочего органа 400; указанный узел 200 привода предназначен для приведения в движение указанной ходовой части 100, указанного блока 300 поворота и указанного рабочего органа 400. Указанная ходовая часть 100, указанный узел 200 привода, указанный блок 300 поворота и указанный рабочий орган 400 могут быть с возможностью управления связаны с указанным блоком 30 управления.
Указанная система 1 для автоматического изменения направления сельскохозяйственной машины может содержать указанный приемный блок 10, указанный блок 20 обработки данных и указанный блок 30 управления, при этом указанный приемный блок предназначен для получения информации, получаемой нет от указанной сельскохозяйственной машины 1000, и информации, получаемой от указанной сельскохозяйственной машины 1000; при этом указанный блок 20 обработки данных на основании информации, полученной указанным приемным блоком 10, генерирует заключение, при этом указанное заключение содержит скорость движения сельскохозяйственной машины и угол поворота сельскохозяйственной машины; при этом указанный блок 30 управления на основании заключения, сгенерированного указанным блоком 20 обработки данных, управляет указанной ходовой частью 100 и указанным блоком 300 поворота указанной сельскохозяйственной машины 1000, чтобы указанная сельскохозяйственная машина 1000 в конце этого пути обработки R указанного участка обработки s выполнила поворот с перемещением на следующий путь обработки R.
После получения указанным приемным блоком 10 одной установленной команды изменить направление указанный блок 20 обработки данных может быть выполнен с возможностью следующего: направления сначала команды снизить скорость в указанный блок 30 управления со снижением скорости указанной сельскохозяйственной машины 1000 до заданного значения; последующего направления команды выполнить поворот в указанный блок 30 управления с изменением направления перемещения указанной сельскохозяйственной машины 1000 до нужного. Указанная сельскохозяйственная машина 1000 выполнена с возможностью осуществления поворота под управлением указанного блока 30 управления, при этом указанный блок 20 обработки данных выполнен с возможностью направления команды на ускорение в указанный блок 30 управления для ускорения поворота указанной сельскохозяйственной машины 1000.
Следует отметить, что начальный путь обработки R и последующий путь обработки R совсем не обязательно должны примыкать друг к другу. Межу ними может быть промежуток. Например, на указанном участке обработки s есть пять рядов, при этом первый ряд, третий ряд и пятый ряд уже засеяны растениями, и если теперь необходимо обработать второй ряд и четвертый ряд, то второй ряд в качестве начального пути обработки R и четвертый ряд в качестве последующего пути обработки R разделены промежутком. Указанная сельскохозяйственная машина 1000 под управлением указанной системой 1 для автоматического изменения направления сельскохозяйственной машины все-таки может изменить направление со второго ряда на четвертый ряд.
Специалистам в данной области техники должно быть понятно, что варианты осуществления настоящего изобретения, представленные в вышеприведенном описании и прилагаемых графических материалах, являются исключительно примерами и нисколько не ограничивают настоящее изобретение. Цели настоящего изобретения были полностью и эффективно осуществлены. В вариантах осуществления были раскрыты и объяснены назначение и основные принципы конструкции настоящего изобретения, и без отступления от указанных основных принципов в способы осуществления настоящего изобретения могут быть внесены любые изменения или модификации.
Реферат
Группа изобретений относится к сельскому хозяйству. Оконечное устройство, предназначенное для автоматического управления изменением направления перемещения по меньшей мере одной сельскохозяйственной машины, содержит по меньшей мере один приемный блок, предназначенный для получения информации, получаемой не от сельскохозяйственной машины, и информации, получаемой от сельскохозяйственной машины, и один блок обработки данных. Блок обработки данных выполнен с возможностью генерирования заключения, содержащего скорость движения сельскохозяйственной машины и угол поворота сельскохозяйственной машины, на основании информации, полученной приемным блоком, и отправки заключения в один блок управления сельскохозяйственной машины. Блок управления выполнен с возможностью управления скоростью движения и углом поворота сельскохозяйственной машины на основании заключения, сгенерированного блоком обработки данных, с обеспечением поворота сельскохозяйственной машины в конце одного пути обработки на участке обработки и ее перемещением на следующий путь обработки. Способ автоматического изменения направления перемещения сельскохозяйственной машины с использованием оконечного устройства включает этапы, на которых после получения установленной команды изменить направление в устройство управления сельскохозяйственной машиной посредством обрабатывающего устройства направляют команду снизить скорость с управлением снижением скорости сельскохозяйственной машины, расположенной на одном пути обработки на участке обработки, содержащем по меньшей мере два пути обработки, и перемещающейся по одному пути обработки сельскохозяйственной машине необходимо выполнить поворот для перехода на следующий путь обработки; после снижения скорости сельскохозяйственной машины до заданного значения в устройство управления сельскохозяйственной машины посредством обрабатывающего устройства направляют команду выполнить поворот с управлением поворотом сельскохозяйственной машины; и после поворота сельскохозяйственной машины с ее переходом на новый путь обработки сельскохозяйственную машину выравнивают с обеспечением возможности продолжения обработки сельскохозяйственной машиной по новому пути обработки; путь обработки сельскохозяйственной машиной устанавливают на основании двух рабочих положений и двух концов в пределах участка обработки. Система для автоматического изменения направления перемещения сельскохозяйственной машины с использованием оконечного устройства содержит один приемный блок, предназначенный для получения информации, получаемой не от сельскохозяйственной машины, и информации, получаемой от сельскохозяйственной машины, один блок обработки данных и один блок управления. Блок обработки данных выполнен с возможностью генерирования заключения, содержащего скорость движения сельскохозяйственной машины и угол поворота сельскохозяйственной машины, на основании информации, полученной приемным блоком. Блок управления выполнен с возможностью управления скоростью движения и углом поворота сельскохозяйственной машины на основании заключения, сгенерированного блоком обработки данных, с обеспечением поворота сельскохозяйственной машины в конце одного пути обработки на участке обработки и ее перемещением на следующий путь обработки. Сельскохозяйственная машина, снабженная системой для автоматического изменения направления перемещения сельскохозяйственной машины с использованием оконечного устройства, содержит основную часть сельскохозяйственной машины и систему для автоматического изменения направления сельскохозяйственной машины. Основная часть сельскохозяйственной машины содержит ходовую часть, один узел привода, один блок поворота, рабочий орган и один блок управления. Рабочий орган и ходовая часть с возможностью приведения в движение соответственно соединены с узлом привода. Блок поворота, ходовая часть, узел привода и рабочий орган соответственно с возможностью управления связаны с блоком управления. Система для автоматического изменения направления сельскохозяйственной машины содержит один приемный блок и один блок обработки данных. Приемный блок предназначен для получения информации, получаемой не от сельскохозяйственной машины, и информации, получаемой от сельскохозяйственной машины. Блок обработки данных выполнен с возможностью генерирования заключения, содержащего скорость движения сельскохозяйственной машины и угол поворота сельскохозяйственной машины, на основании информации, полученной приемным блоком. Блок управления выполнен с возможностью управления ходовой частью и блоком поворота сельскохозяйственной машины на основании заключения, сгенерированного блоком обработки данных, с обеспечением поворота сельскохозяйственной машины в конце одного пути обработки на участке обработки и ее перемещением на следующий путь обработки. Обеспечивается улучшение автоматического управления изменением направления перемещения сельскохозяйственной машины. 4 н. и 15 з.п. ф-лы, 10 ил.
Формула
Документы, цитированные в отчёте о поиске
Способ планирования последующей обработки при осуществлении сельскохозяйственных работ
Сеноуборочное устройство
Комментарии