Сеноуборочное устройство - RU2562215C2
Код документа: RU2562215C2
Чертежи
Описание
Предпосылки создания изобретения
Изобретение относится к сеноуборочному устройству, такому как косилка для скашивания сельскохозяйственных культур или грабли, ворошилка или устройство для переворачивания скошенной сельскохозяйственной культуры, при этом инструменты данного устройства, обрабатывающие сельскохозяйственную культуру, перемещаются управляемым образом между рабочим положением в сцеплении с сельскохозяйственной культурой и положением на расстоянии от сельскохозяйственной культуры.
При обработке сельскохозяйственной культуры в процессе заготовки сена обрабатывающее устройство, такое как грабли, перемещают по скашиваемому полю параллельными возвратно-поступательными рабочими ходами. Поворот сеноуборочного устройство на 180° происходит на поперечных полосах скашиваемого поля, в начале и в конце площади, на которой выполняются параллельные рабочие ходы. Упомянутые поперечные полосы также называют поворотными полосами.
Из соображений эффективности поворотные полосы обрабатывают отдельными рабочими ходами, обычно в основном направлении поворотных полос. Обычно поворотные полосы обрабатывают в первую очередь. Сельскохозяйственная культура некоторое время остается на скошенном поле, разбросанная или уложенная продолговатыми валками.
Чтобы препятствовать нежелательному зацеплению сельскохозяйственной культуры в поворотной полосе инструментами сеноуборочного устройства при вхождении в поворотную полосу в конце рабочего хода, упомянутые инструменты приводят в приподнятое положение готовности, в котором они не зацепляют сельскохозяйственную культуру. При возврате из поворотной полосы на обрабатываемый участок инструменты вновь приводят в рабочее положение.
В патентной заявке NL 95.00642 раскрыт трактор, снабженный одним или более различными инструментами, которые действуют один за другим и расположены один позади другого и которые можно приподнимать и опускать один за другим в заданном хронологическом порядке. Инструменты могут, например, представлять собой комбинацию косилки и граблей.
Патентная заявка EP 0 788 730 относится к подъему и опусканию инструментов, расположенных друг за другом, таких как грабли, в определенном хронологическом порядке при столкновении с валком, расположенным поперек направления движения.
В патентной заявке EP 1 364 573 раскрыт процесс подъема/опускания передней пары грабельных элементов и задней пары грабельных элементов независимо от скорости при въезде в поворотную полосу и выезде из нее соответственно.
Из патентной заявки EP 1 306 000 известно, как во время работы самоходной косилки, имеющей режущий аппарат спереди, а также с левой и с правой сторон, поднимать и опускать передний режущий аппарат и пару боковых режущих аппаратов друг за другом при въезде в поворотную полосу и выезде из нее.
В вышеупомянутых патентных заявках описан способ, как не зацепить валок около поворотной полосы поля посредством подъема и опускания инструментов для обработки сельскохозяйственной культуры в обеспечивающем эффективность порядке. Недостаток известных устройств состоит в том, что в случае, если валок не расположен под прямым углом к направлению движения, невозможно обработать поле оптимальным образом. В зависимости от угла, под которым расположен валок относительно направления движения, в известных устройствах приходится перемещать инструменты для обработки сельскохозяйственной культуры в отведенное положение готовности на большем расстоянии от валка, чтобы предотвратить его зацепление. При использовании способа, описанного в вышеупомянутых патентных заявках, в случае, если на поле имеются косые поворотные полосы, поверхность поля не может быть использована оптимально.
Сущность изобретения
Технической задачей изобретения является создание сеноуборочного устройства, принадлежащего к описанному в преамбуле типу, в котором устранен упомянутый недостаток, т. е. сеноуборочного устройства, в котором, даже если въезд на поворотную полосу и выезд с нее в процессе выполнения рабочих ходов осуществляется под косым углом, можно получить эффективную последовательность подъема и опускания инструментов для обработки сельскохозяйственной культуры.
Еще одна задача изобретения состоит в создании сеноуборочного устройства упомянутого в преамбуле типа, посредством которого при въезде на поворотную полосу и выезде с нее, если поворотная полоса расположена под косым углом к направлению рабочих ходов, можно оптимально отрегулировать подъем и опускание инструментов для обработки сельскохозяйственной культуры в соответствии с углом расположения линии перехода.
Чтобы решить хотя бы одну из данных задач, один объект изобретения обеспечивает сеноуборочное устройство, содержащее: раму, подвижную в направлении перемещения и содержащую по меньшей мере первый и второй инструменты для обработки сельскохозяйственной культуры, в частности инструменты для смещения сельскохозяйственной культуры, например грабли, которые расположены бок о бок, и первое и второе средства переключения для перемещения первого и второго инструментов для обработки сельскохозяйственной культуры из рабочего положения, в котором они зацепляют сельскохозяйственную культуру с целью ее смещения, в положение ожидания, в котором они не зацепляют сельскохозяйственную культуру, и наоборот, соответственно; и программируемый узел управления для средства переключения, причем первое и второе средства переключения можно приводить в действие независимо друг от друга с помощью узла управления, при этом узел управления предназначен для обработки первых данных, показывающих угол между направлением движения устройства по полю в процессе выполнения рабочего хода и по меньшей мере одной граничной линией, в частности - начальной или конечной линией, при этом узел управления также предназначен для обработки вторых данных, показывающих скорость устройства в направлении движения, а также для приведения в действие первого и второго средств переключения, одно за другим, в зависимости от первых и вторых данных, при подходе к упомянутой по меньшей мере одной граничной линии.
В результате того, что инструменты для обработки сельскохозяйственной культуры можно приводить в действие независимо друг от друга, в зависимости от угла расположения граничной линии и скорости устройства, появляется возможность оптимального использования всей поверхности площади поля и, следовательно, имеющейся на поле сельскохозяйственной культуры.
При приближении к граничной линии, расположенной под косым углом к направлению движения, первый и второй инструменты для обработки сельскохозяйственной культуры могут быть перемещены независимо друг от друга в рабочее положение или выведены из него, что дает возможность оптимального приспосабливания к конкретной ситуации. В случае с двумя расположенными рядом инструментами пользователю устройства не обязательно самостоятельно оценивать, когда именно нужно опустить или приподнять второй инструмент после первого инструмента. При угле в 90° можно приподнимать и опускать оба инструмента для обработки сельскохозяйственной культуры одновременно.
В результате того факта, что пользователю больше не нужно самому оценивать, когда следует поднять или опустить инструменты для обработки сельскохозяйственной культуры, уменьшается риск человеческих ошибок, и тем самым увеличивается эффективность устройства.
Согласно дальнейшему усовершенствованию сеноуборочное устройство согласно изобретению содержит третий инструмент для обработки сельскохозяйственной культуры, предпочтительно принадлежащий к тому же типу, что и первый и второй инструменты для обработки сельскохозяйственной культуры, причем третий инструмент для обработки сельскохозяйственной культуры расположен позади первого и второго инструментов для обработки сельскохозяйственной культуры в направлении движения, а также содержит третье средство переключения для перемещения третьего инструмента для обработки сельскохозяйственной культуры из рабочего положения, в котором он зацепляет сельскохозяйственную культуру с целью ее смещения, в положение ожидания, в котором он не зацепляет сельскохозяйственную культуру, и наоборот; при этом первое, второе и третье средства переключения можно приводить в действие независимо друг от друга с помощью узла управления, причем узел управления приводит в действие третье средство переключения после первого и/или второго средств переключения, в зависимости от первых и вторых данных, при подходе к упомянутой по меньшей мере одной граничной линии.
Имеющее такую конструкцию устройство согласно изобретению может быть дополнено четвертым инструментом для обработки сельскохозяйственной культуры, при этом четвертый инструмент для обработки сельскохозяйственной культуры расположен в стороне от третьего инструмента для обработки сельскохозяйственной культуры и принадлежит к тому же типу, а также может содержать четвертое средство переключения для перемещения четвертого инструмента для обработки сельскохозяйственной культуры из рабочего положения, в котором он зацепляет сельскохозяйственную культуру для ее смещения, в положение ожидания, в котором он не зацепляет сельскохозяйственную культуру, и наоборот; при этом первое, второе, третье и четвертое средства переключения можно приводить в действие независимо друг от друга с помощью узла управления, причем узел управления приводит в действие четвертое средство переключения после первого и/или второго средств переключения и одновременно с третьим средством переключения или после него, в зависимости от первых и вторых данных при подходе устройства к граничной линии.
Также, в случае наличия множества инструментов для обработки сельскохозяйственной культуры это позволяет уменьшить риск человеческих ошибок. Управление дополнительными инструментами для обработки сельскохозяйственной культуры, что касается определения момента подъема или опускания и последовательности данных операций, зависит от первого инструмента для обработки сельскохозяйственной культуры. Данная взаимозависимость позволяет сделать управление простым, при этом нет необходимости определять момент подъема и опускания для каждого инструмента по отдельности.
Инструменты для обработки сельскохозяйственной культуры могут поворачиваться вокруг соответствующих центральных осей вращения, в частности вокруг осей вращения, которые, по существу, вертикальны, в рабочем положении. Инструменты для обработки сельскохозяйственной культуры, в частности, могут иметь конструкцию так называемых круговых грабель. Круговые грабли могут быть установлены известным способом на своих собственных поворотных рычагах, которые могут поворачиваться вокруг, по существу, горизонтальной центральной оси вращения, например, посредством цилиндра.
Центральные оси вращения первого и второго инструментов для обработки сельскохозяйственной культуры предпочтительно расположены, по существу, на линии, перпендикулярной направлению движения. Центральные оси вращения третьего и четвертого инструментов для обработки сельскохозяйственной культуры предпочтительно расположены, по существу, на линии, перпендикулярной направлению движения.
Последовательность приведения в действие вышеупомянутых средств переключения, таким образом, может быть согласована со скоростью устройства при приближении к граничной линии и ее пересечении.
Согласно дополнительному усовершенствованию устройства узел управления снабжен памятью для хранения третьих данных, показывающих положение инструментов для обработки сельскохозяйственной культуры, имеющихся в устройстве, относительно опорной точки, при этом данная точка предпочтительно располагается в неподвижном месте на устройстве, и узел управления также может приводить в действие вышеупомянутые средства переключения независимо от третьих данных. Таким образом, можно учесть расстояние между инструментами для обработки сельскохозяйственной культуры и их расположение в устройстве, чтобы обеспечить лучше использование поверхности поля.
Точность устройства дополнительно улучшается, если известно взаимное расположение инструментов для обработки сельскохозяйственной культуры, так как можно более точно определить момент подъема и опускания в случае с множеством инструментов для обработки сельскохозяйственной культуры.
Согласно дополнительному усовершенствованию устройство дополнительно снабжено средством измерения для измерения расстояния от инструментов для обработки сельскохозяйственной культуры до опорной точки или его изменения, причем данное средство измерения функционально связано с узлом управления с целью подачи соответствующего измерительного сигнала, для хранения в памяти в качестве третьих данных. Наличие средства измерения дает возможность определить взаимное расположение инструментов для обработки сельскохозяйственной культуры в любой момент, так что устройство становится более приспособляемым.
Согласно дополнительному усовершенствованию устройства согласно изобретению узел управления может обрабатывать четвертые данные, указывающие на угол между направлением движения устройства по полю при выполнении рабочего хода и базовой линией, например, но не обязательно, линией, указывающей на север, причем устройство управления регулирует первые данные в соответствии с изменением четвертых данных. Если направление движения меняется, и устройство приближается к граничной линии под другим углом, это учитывается при приведении в действие разных средств переключения, так что упомянутое приведение в действие средства переключения не произойдет позже или раньше желательного момента времени.
Результатом этого является возможность компенсировать с помощью устройства любое отклонение в направлении движения, что касается угла к граничной линии, тем самым увеличивается эффективность устройства.
Устройство может быть снабжено средством управления, которое человек использует, чтобы привести в действие первое средство переключения посредством узла управления. Это дает возможность пользователю устройства самостоятельно определять момент начала подъема или опускания при приближении к граничной линии, после чего узел управления самостоятельно обеспечивает приведение в действие другие вышеупомянутые средства переключения в правильной последовательности.
Согласно дополнительному усовершенствованию устройство снабжено памятью для хранения первых данных. Таким образом, узел управления постоянно имеет в распоряжении требуемые данные, например, в виде заранее заданных координат. Это дает возможность автоматического или полуавтоматического функционирования устройства согласно изобретению.
Устройство также может быть снабжено средством обнаружения для получения первых данных, которое может автономно определять угол между граничной линией и направлением движения при приближении к граничной линии. В этом случае водителю не нужно самому производить оценку.
Узел управления также может приводить в действие вышеупомянутые средства переключения в полуавтоматическом или автоматическом режиме также в зависимости от первых данных.
Следовательно, риск человеческих ошибок дополнительно сокращается. Теперь пользователю не нужно самому определять угол приближения.
При полуавтоматической работе узел управления может подать сигнал, после чего водитель может запустить процесс подъема или опускания. В автоматическом варианте осуществления устройство начинает подъем/опускание полностью автономно, основываясь на первых данных, без вмешательства водителя.
Следует отметить, что в патентной заявке WO84/02250 показан многолемешный плуг, лемеха которого расположены друг за другом «в шахматном порядке», при этом лемеха плуга можно приподнимать один за другим при достижении расположенной поперек направления движения линии перехода к поворотной полосе, чтобы убедиться, что обрабатывается вся площадь поверхности.
Можно также обратиться к патентной заявке EP 0 807 373, в которой предложено с целью исключения появления зигзагообразной линии перехода приподнимать и опускать штангу, которая продолжается под наклоном, назад и вбок от трактора и которая снабжена группой лемехов, по достижении переходной линии, расположенной под углом 90° к направлению движения. В этом случае штангу можно поднимать и опускать как единое целое от трехточечной сцепки, однако возможен и дополнительный наклон группы лемехов как единого целого с помощью цилиндра, обеспеченного на конце штанги, около опорного колеса. Момент приведения в действие цилиндра задают посредством регулируемого средства управления, чтобы повлиять на момент, когда лемеха плуга входят в почву или выходят из нее. Подъем, опускание и наклон штанги могут происходить способом, при котором они также зависят от измеренного пройденного расстояния или измеренной скорости/времени. Результатом того факта, что лемеха плуга наклоняют как единую группу, является влияние на эффективность каждого лемеха при изменении высоты конца штанги.
Аспекты и признаки, представленные в данном описании и формуле изобретения и/или показанные на чертежах данной заявки, также могут, если возможно, быть использованы отдельно друг от друга. Данные отдельные объекты могут стать предметом выделенной патентной заявки, родственной по отношению к данной. Это относится, в частности, к признакам и аспектам, рассмотренным в зависимых пунктах формулы изобретения.
Краткое описание чертежей
Изобретение будет описано со ссылкой на иллюстративный вариант осуществления, показанный на прилагаемых чертежах, на которых:
на фиг. 1 представлен схематичный вид сверху устройства согласно изобретению;
на фиг. 1А - схематичный вид узла управления для устройства, представленного на фиг. 1;
на фиг. 2 - схематичный вид плана работ для устройства, представленного на фиг. 1;
на фиг. 2A-L показана последовательность этапов при использовании устройства, представленного на фиг. 1, в плане работ, представленном на фиг. 2.
Подробное описание чертежей
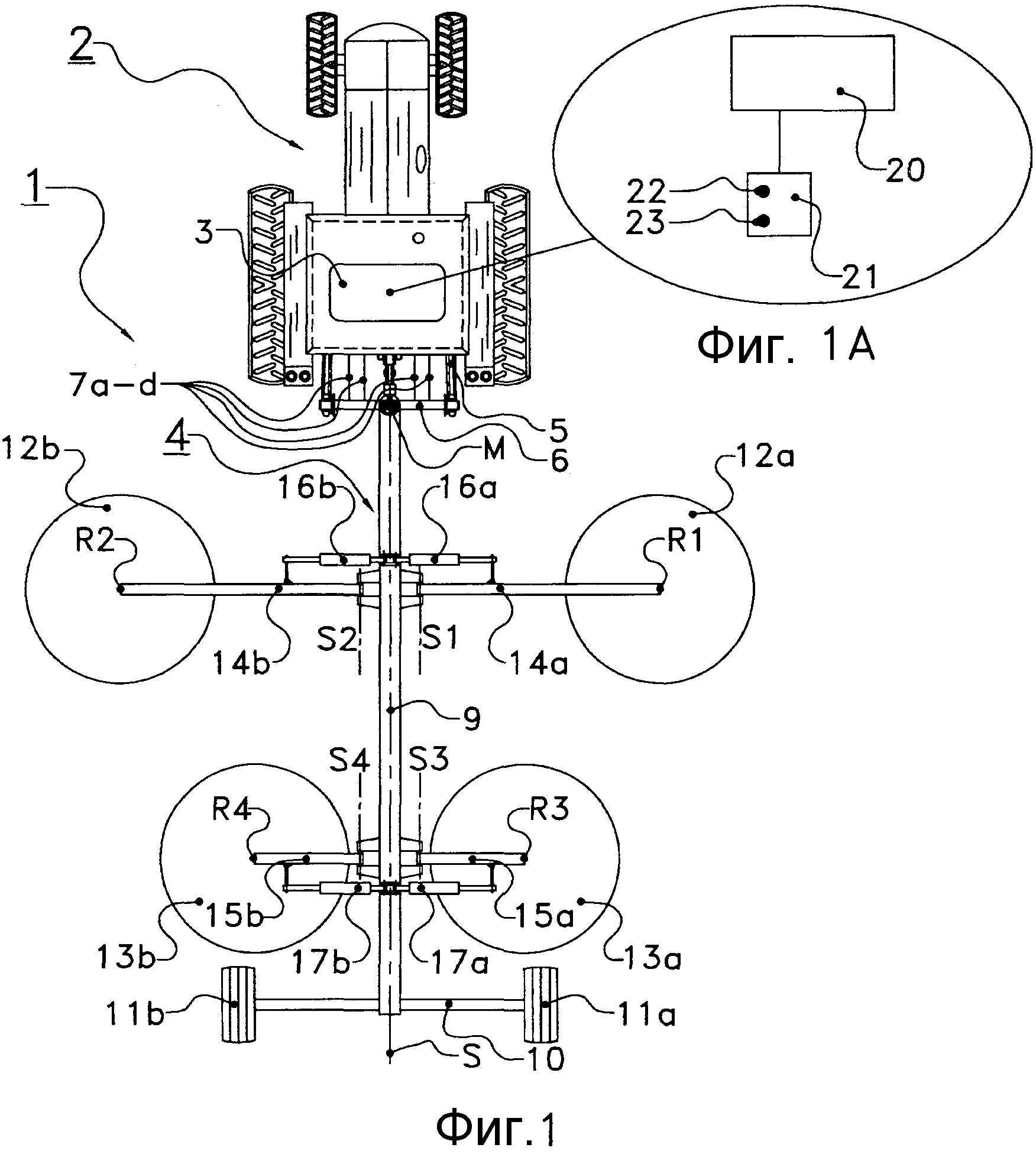
Сеноуборочное устройство 1, показанное на фиг. 1, содержит трактор 2 с кабиной 3 и грабельное устройство 4, которое тянет трактор, причем грабельное устройство 4 прикреплено к сцепному устройству 6 трактора 2 посредством средства сцепления 5.
В кабине 3 трактора 2 обеспечен программируемый узел управления 20 с панелью управления/панелью ввода 21 для различных приводов в сеноуборочном устройстве 1.
Приводные валы 7а, гидравлические линии 7b, электрические провода 7c и линии передачи данных 7d идут от трактора 2 к грабельному устройству 4 для выполнения различных функций, таких как поворот круговых грабель 12a, b, 13a, b, выдвижение и убирание цилиндров 16a, b, 17a, b, освещение, измерение и передача результатов измерения в узел управления 20.
Грабельное устройство 4 содержат раму, имеющую продольную балку 9 с продольной осевой линией S и поперечную несущую 10 с опорными колесами 11a, b, расположенную с заднего конца. Грабельное устройство 4 имеет метку M, которая может служить в качестве опорной точки (как будет разъяснено далее), расположенной на известных расстояниях в продольном и поперечном направлениях от осевых линий R1, 2, 3, 4 роторов. Грабельное устройство 4 содержит четыре круговых грабель 12a, b и 13a, b, которые имеют соответствующие центральные оси вращения R1, 2, 3, 4, которые в представленном на чертеже рабочем положении, по существу, вертикальны. В представленном варианте осуществления круговые грабли 12a, b и 13a, b идентичны и содержат известным, по существу, образом несколько продолжающихся, по существу, в радиальном направлении грабельных брусьев, концы которых снабжены группами грабельных зубьев.
Круговые грабли 12а и 12b установлены известным, по существу, способом на поворотных рычагах 14a, 14b, и, следовательно, поворачиваются вокруг, по существу, горизонтальных осевых линий S1, S2 между представленным на чертеже рабочим положением и одним или более приподнятыми нерабочими положениями. Для осуществления поворота обеспечены цилиндры 16a, 16b, образующие средство переключения, причем данные цилиндры можно приводить в действие посредством узла управления 20. Осевые линии R1 и R2 роторов расположены на линии в поперечной плоскости, перпендикулярной продольной осевой линии S. Однако это не является необходимым для функционирования устройства согласно изобретению, как будет разъяснено далее.
Круговые грабли 13а и 13b установлены известным, по существу, способом на поворотных рычагах 15a, 15b, и, таким образом, поворачиваются вокруг, по существу, горизонтальных осевых линий S3, S4 между представленным на чертеже рабочим положением и одним или более приподнятыми нерабочими положениями. Для осуществления поворота обеспечены цилиндры 17a, 17b, образующие средство переключения, причем данные цилиндры можно приводить в действие посредством узла управления 20. В варианте осуществления, показанном на фиг. 1, поворотные рычаги 15a, b короче поворотных рычагов 14a, b. Осевые линии R1 и R2 роторов расположены на линии в поперечной плоскости, перпендикулярной продольной осевой линии S.
Вышеупомянутые нерабочие положения включают в себя транспортное положение, в котором поворотные рычаги направлены, по существу, вертикально вверх, и положения ожидания, в которых грабельные зубья круговых грабель 12a, b и 13a, b не зацепляют сгребаемую сельскохозяйственную культуру, лежащую на скошенном поле, т.е. не выполняют действий по сгребанию упомянутой сельскохозяйственной культуры.
Первые данные, относящиеся к углу между направлением перемещения и граничной линией, образующей переход между основной площадью и поворотной полосой, могут быть введены посредством панели управления 21 в узел управления 20, более подробно показанный на фиг. 1А. Это можно осуществить путем ввода и подтверждения значения (выраженного в количестве градусов) рассматриваемого угла посредством поворотной ручки 22 с градусным индикатором.
Еще один способ ввода данных, относящихся к углу, или установки угла между направлением движения и граничной линией состоит в автоматическом отслеживании угла при приближении к граничной линии. Это возможно благодаря различным, по существу, известным способам обнаружения, в частности, с помощью оптического средства, например по меньшей мере одной камеры.
Согласно одному из вариантов осуществления первые данные могут быть получены посредством предварительно введенного в программу плана обрабатываемого поля, который хранится в памяти; в этом случае значения углов уже известны. Это можно выполнить, например, вручную или посредством навигационного устройства GPS.
Расстояния в продольном направлении между опорной точкой М, в качестве которой может быть использована любая неподвижная точка на устройстве, и передними сторонами круговых грабель 12а, 12b, 13a, 13b, а также упомянутые расстояния в поперечном направлении, могут быть введены в узел управления 20 в качестве третьих данных предварительно, например, на заводе. Если поворотные рычаги 14a, b, 15a, b являются телескопическими согласно одному из вариантов осуществления, то можно также использовать данные, относящиеся к регулированию их длины, в частности расстояния от R1-4 до продольной осевой линии S. С этой целью на поворотных рычагах можно установить датчики в качестве измерителей длины, которые подают данные в узел управления 20.
В дальнейшем усовершенствовании устройство 1 снабжено средством измерения вторых данных, которое показывает скорость точки устройства в направлении движения. Упомянутое средство измерения соединено с узлом управления 20 для выдачи соответствующего измерительного сигнала.
Узел управления 20 также получает данные от спидометра трактора 2. Кроме того, узел управления 20 предпочтительно снабжен навигационным приемником.
Согласно варианту осуществления, представленному на фиг. 1, осевые линии R1 и R2 роторов расположены на линии в поперечной плоскости, перпендикулярной продольной осевой линии S, как осевые линии R3 и R4 роторов, но также возможны и другие варианты взаимного расположения осевых линий роторов, одна относительно другой и/или относительно устройства 1. Осевые линии R1 и R2 не обязательно должны быть, например, расположены на одной линии в поперечной плоскости, перпендикулярной продольной осевой линии S, каждая из них может располагаться на отдельной прямой. То же самое верно и для осевых линий R3 и R4.
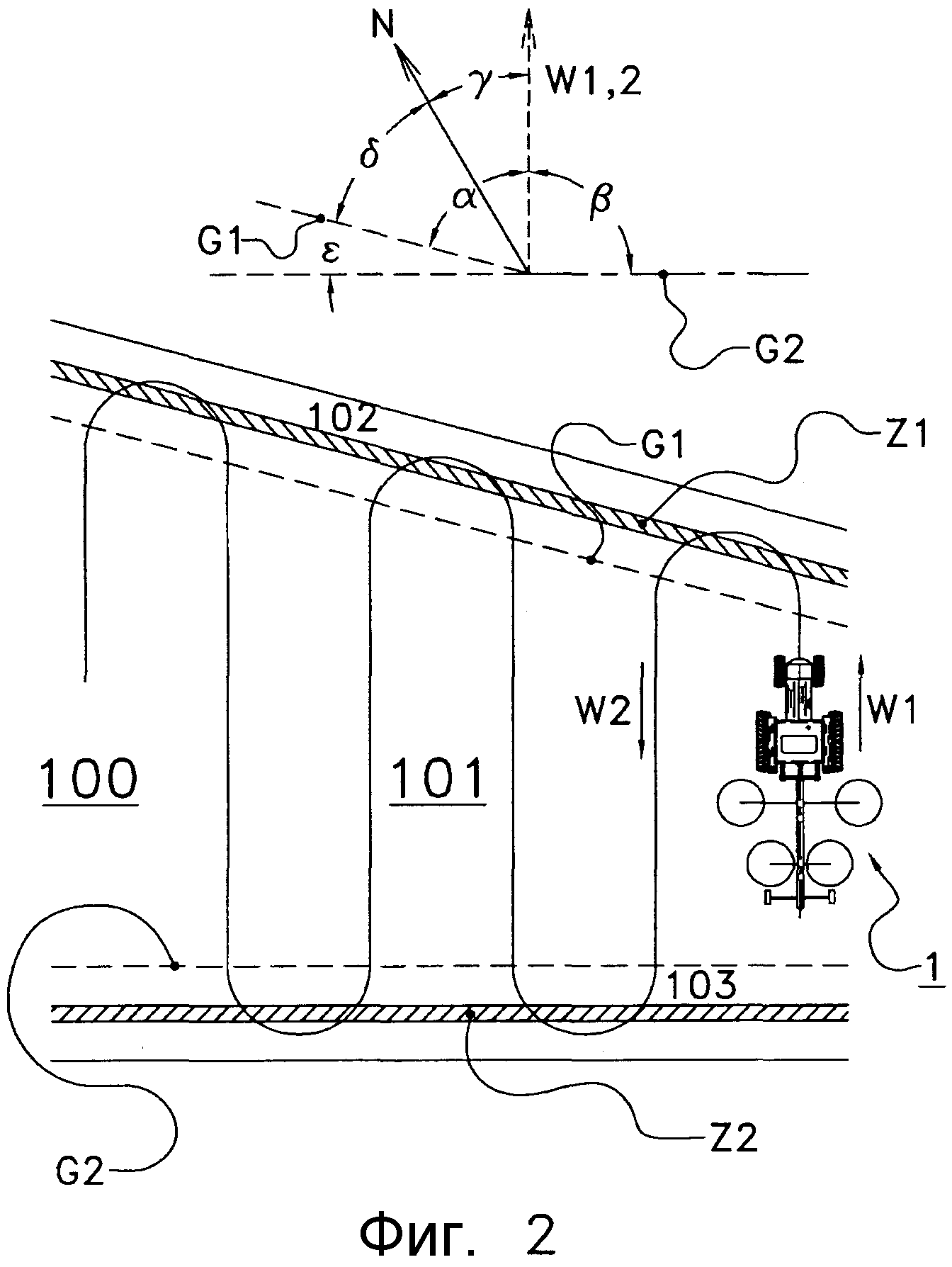
На Фиг. 2 показано поле 100, подлежащее обработке с помощью сеноуборочного устройства 1. Сельскохозяйственная культура на этом поле уже скошена и лежит на земле, свободно разбросанная. Посредством устройства 1 сельскохозяйственную культуру, разбросанную по земле, нужно сгрести известным способом, образуя продолговатые валки. С этой целью поле 100 делят на центральную основную площадь 101, на которой устройство 1 может выполнять параллельные рабочие ходы, и две поворотные полосы 102 и 103, на которых устройство 1 может поворачиваться.
Из соображений, которые будут упомянуты далее, показано направление на север, направление рабочих ходов W1, 2, граничная линия G1 между основной площадью 101 и поворотной полосой 102 и граничная линия G2 между основной площадью 101 и поворотной полосой 103. В данном примере угол «гамма» (γ) между направлением на север и W1, 2 составляет 30°, угол «дельта» (δ) между G1 и направлением на север составляет 45°, а угол «эпсилон» (ε) между G1 и G2 составляет 15°. При этом угол «альфа» (α) между W1/W2 и G1 составляет 75°, и угол «бета» (β) между W1/W2 и G2 составляет 90° (в данном примере). W1, 2 и G2 также могут располагаться под другим углом друг к другу.
Поворотные полосы 102, 103 были обработаны до начала обработки основной площади 101. Валки Z1 и Z2 там уже образованы, и при желании они также могут быть расположены немного ближе к граничной линии G1, G2. При повороте на поворотных полосах 102 и 103 устройство 1 пересекает валки Z1, 2, и по этой причине желательно во время упомянутого поворота привести круговые грабли упомянутого устройства в положение ожидания, чтобы они не зацепляли валки Z1 и Z2. Кроме того, удерживание грабельных зубьев в функциональном контакте с уже обработанной поверхностью приводит к бесполезным затратам энергии. Для эффективной работы желательно, чтобы при повторном въезде на основную площадь 101 круговые грабли вновь начинали функционировать в нужный момент и в нужном месте, чтобы захватить как можно больше сельскохозяйственной культуры.
В простом варианте осуществления водитель оценивает величину угла «альфа» между W1 и G1. Он устанавливает данное значение посредством поворотной ручки 22. Данное значение хранится в памяти узла управления как величина угла «альфа» в качестве первых данных для G1. То же самое происходит в случае с граничной линией G2, в этом случае угловое значение для угла «бета» между W1 и G2 хранится в качестве первых данных для G2. Данные оценки могут быть выполнены водителем заранее, в конце обработки поворотных полос, если направление W1, 2 известно заранее, или во время выполнения предварительного прохода по основной площади.
Согласно другому варианту осуществления угол «альфа», например, между W1 и G1 определяется автоматически при приближении к граничной линии. Это может осуществляться, по существу, известным средством обнаружения, например оптическим средством обнаружения, в частности камерой, например стереоскопической (3D) камерой. Данная камера может быть, например, установлена на тракторе и обнаруживает валок Z1. Данные от средства обнаружения, предпочтительно камеры, обрабатываются, и в этом случае угол между Z1 и направлением движения W1, который равен углу между G1 и направлением движения W1, рассчитывают на основе полученного изображения.
Начало подъема или опускания может происходить автоматически, в этом случае узел управления сам определяет, когда начать подъем или опускание, или полуавтоматически, в этом случае узел управления посылает водителю сигнал при приближении к граничной линии, после чего водитель самостоятельно запускает процесс подъема или опускания.
Фиг. 2A-L будут разъяснены ниже; в предложенном варианте осуществления способ перевода устройства из положения ожидания в рабочее положение подразумевает, что подъем и опускание запускаются вручную водителем. Конечно, также можно выполнять это вышеописанным автоматическим или полуавтоматическим способом.
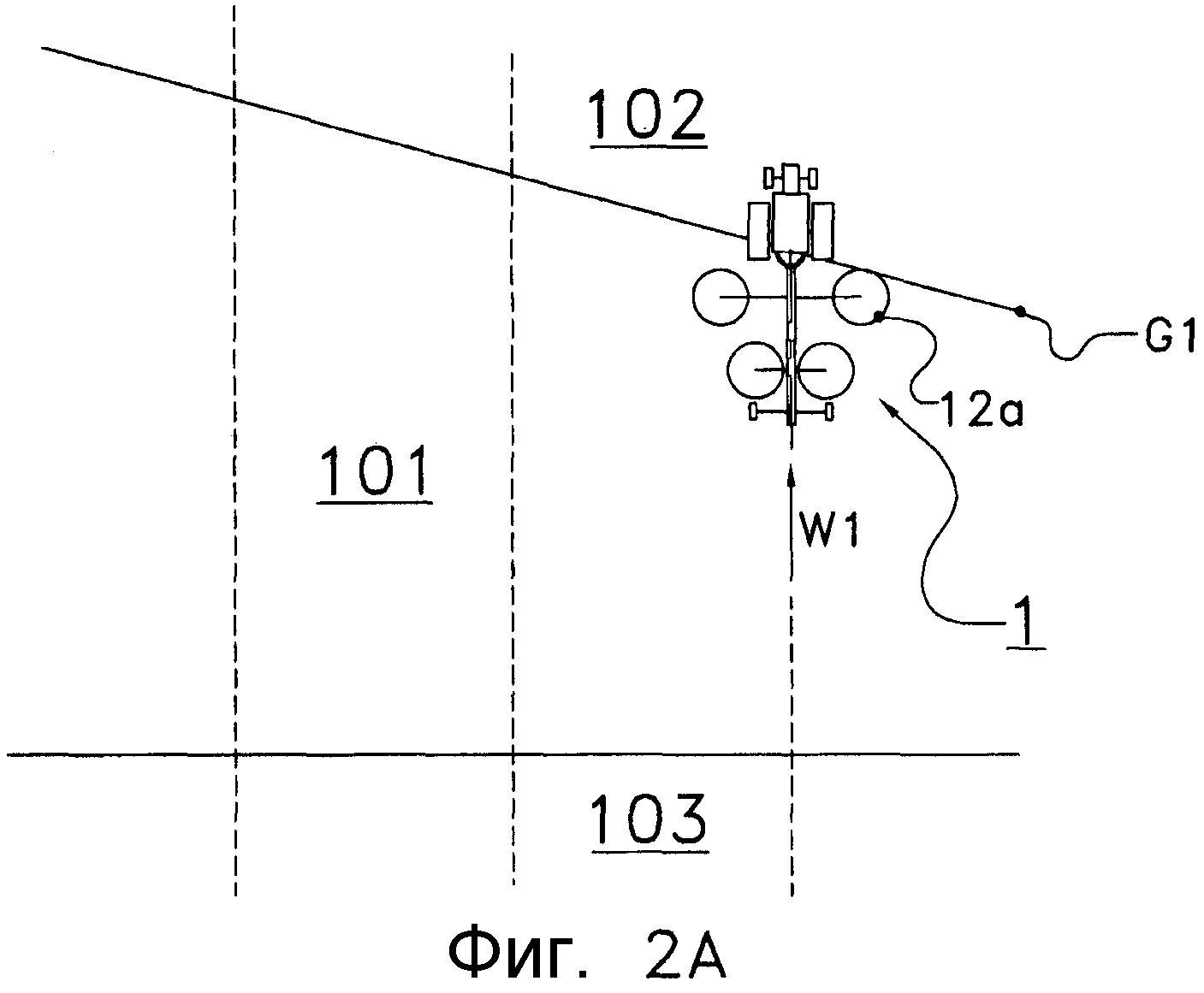
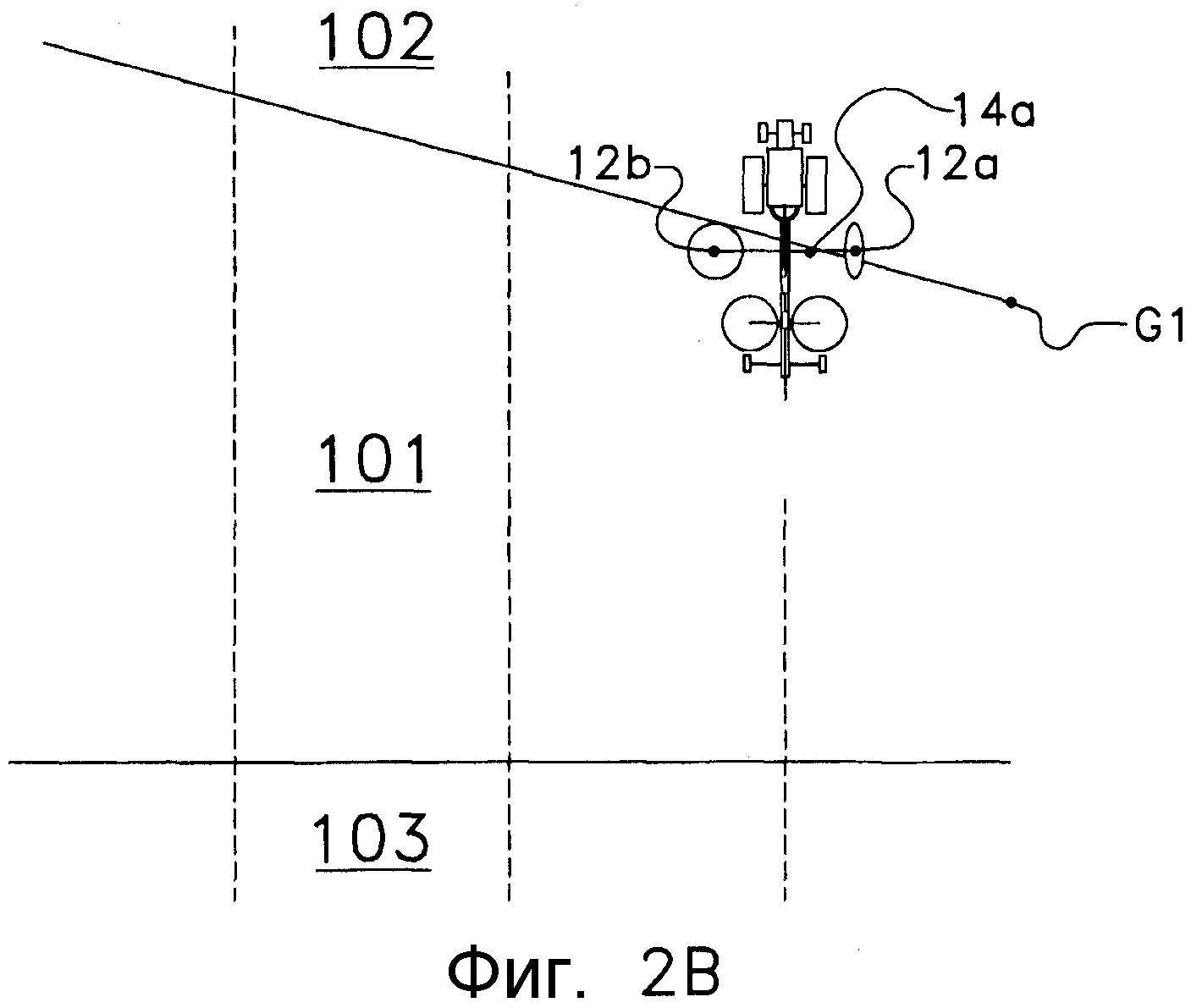
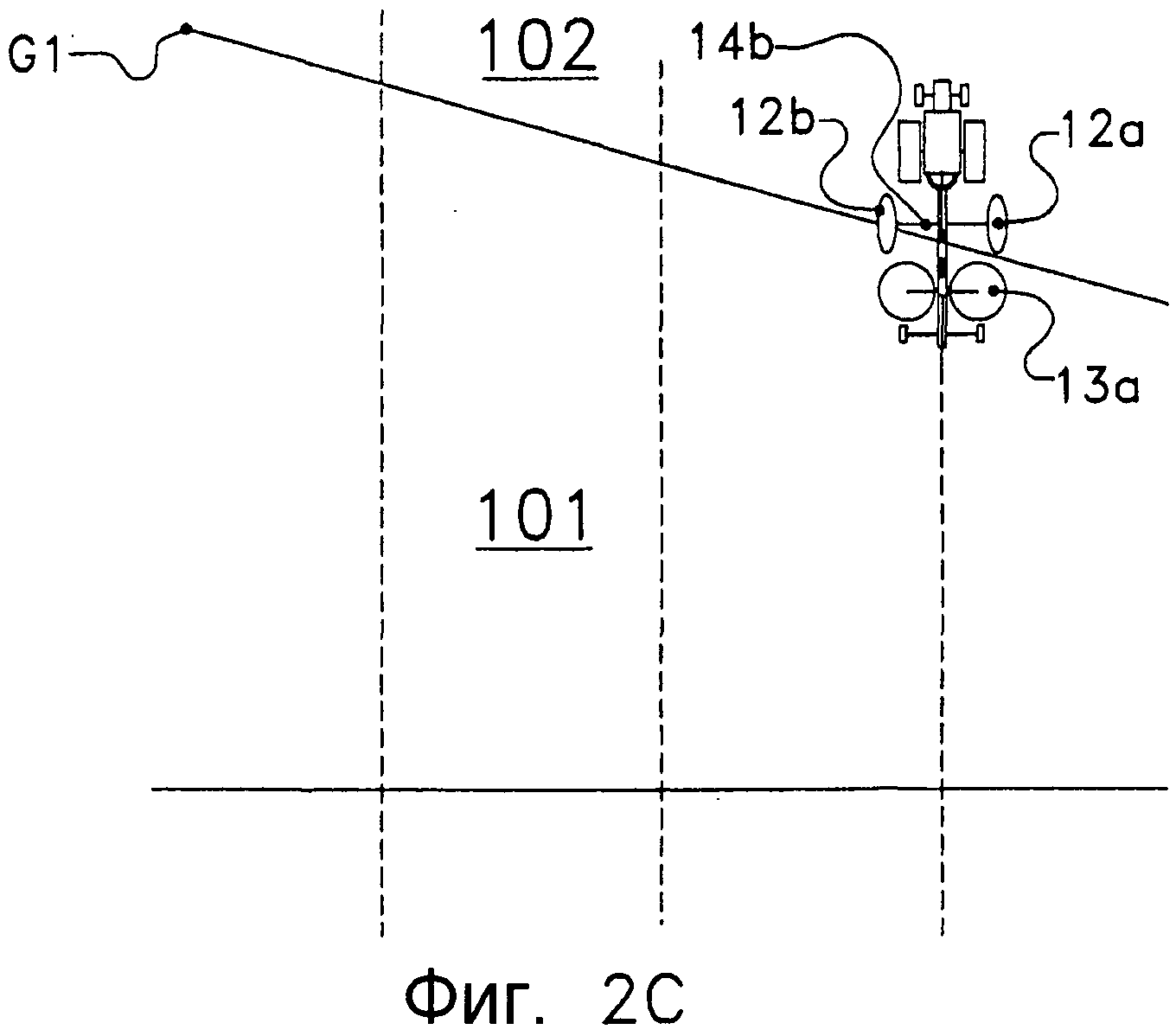
На фиг. 2А устройство 1 с работающими круговыми граблями 12a, b, 13a, b перемещается в процессе первого нормального рабочего хода в направлении W1 и достигает передней стороной круговых грабель 12а граничной линии G1. Водитель трактора 2 нажимает кнопку 23 на панели управления 21, чтобы заставить узел управления 20 убрать цилиндр 16а, таким образом, чтобы круговые грабли 12а повернулись в положение ожидания, как показано на фиг. 2B. На основании вышеупомянутых первых, вторых и третьих данных узел управления определяет момент, когда передняя сторона круговых грабель 12b достигает граничной линии G1, а затем приводит в действие цилиндр 16b, чтобы привести круговые грабли 12b в положение ожидания (см. фиг. 2C).
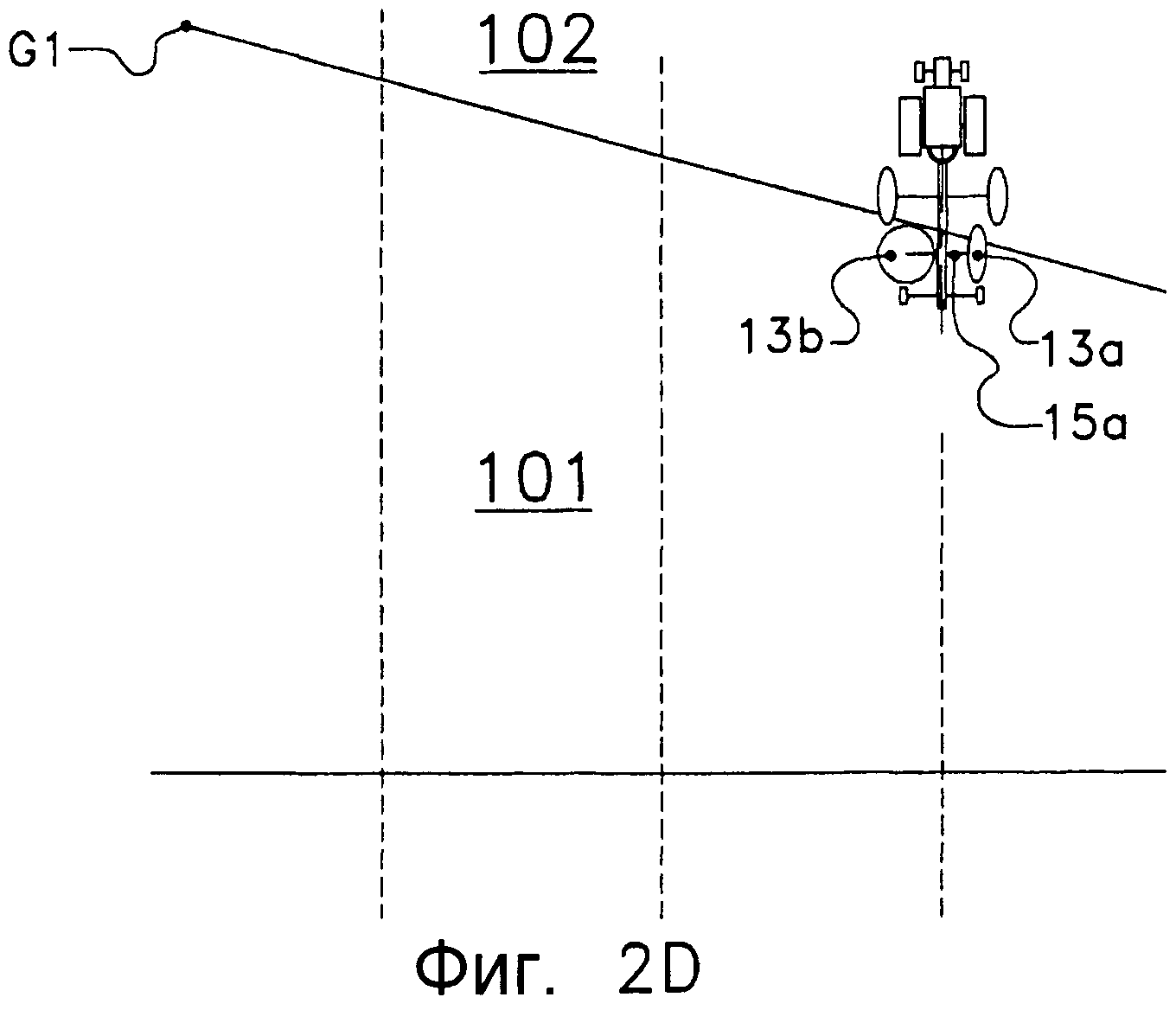
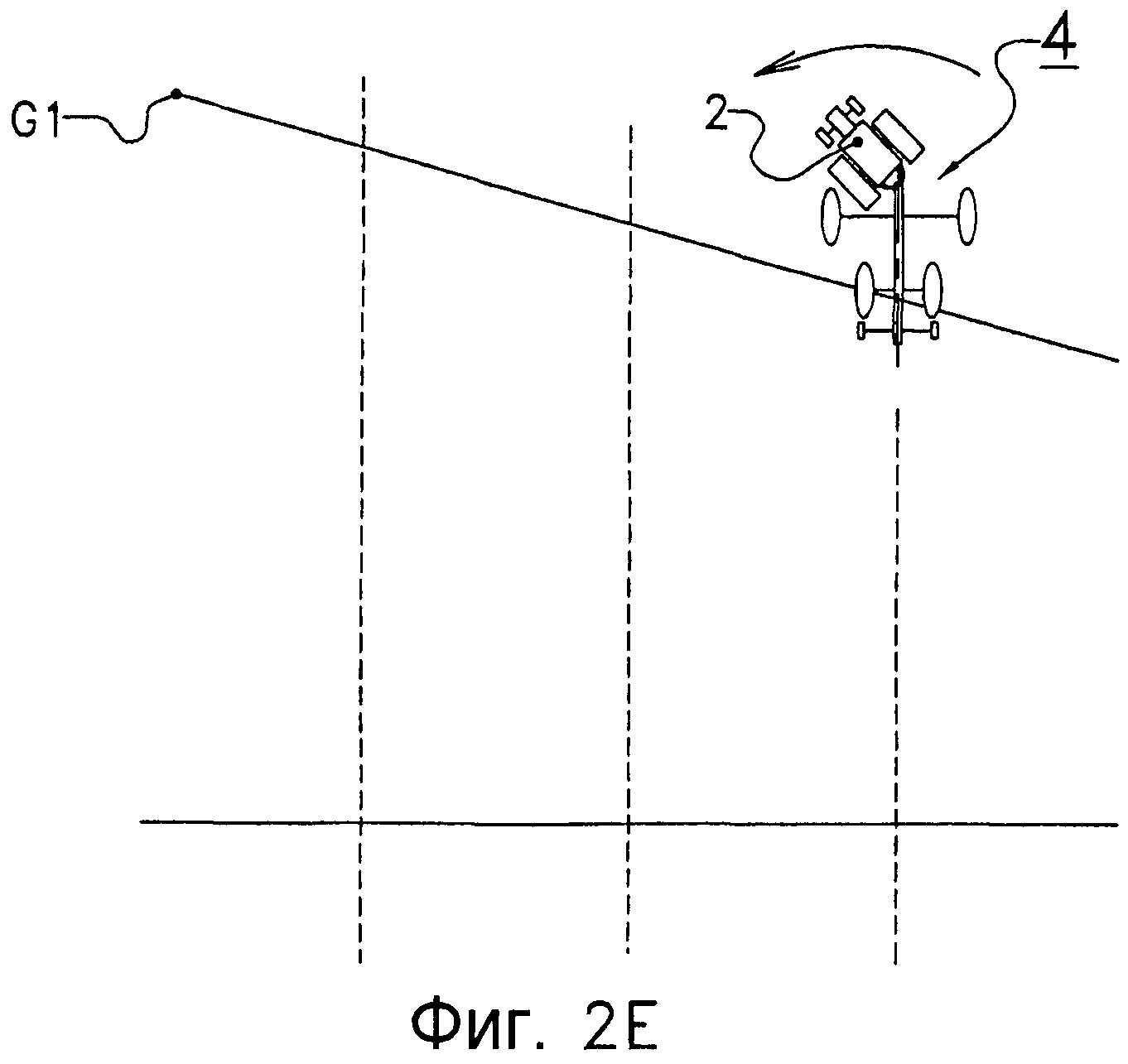
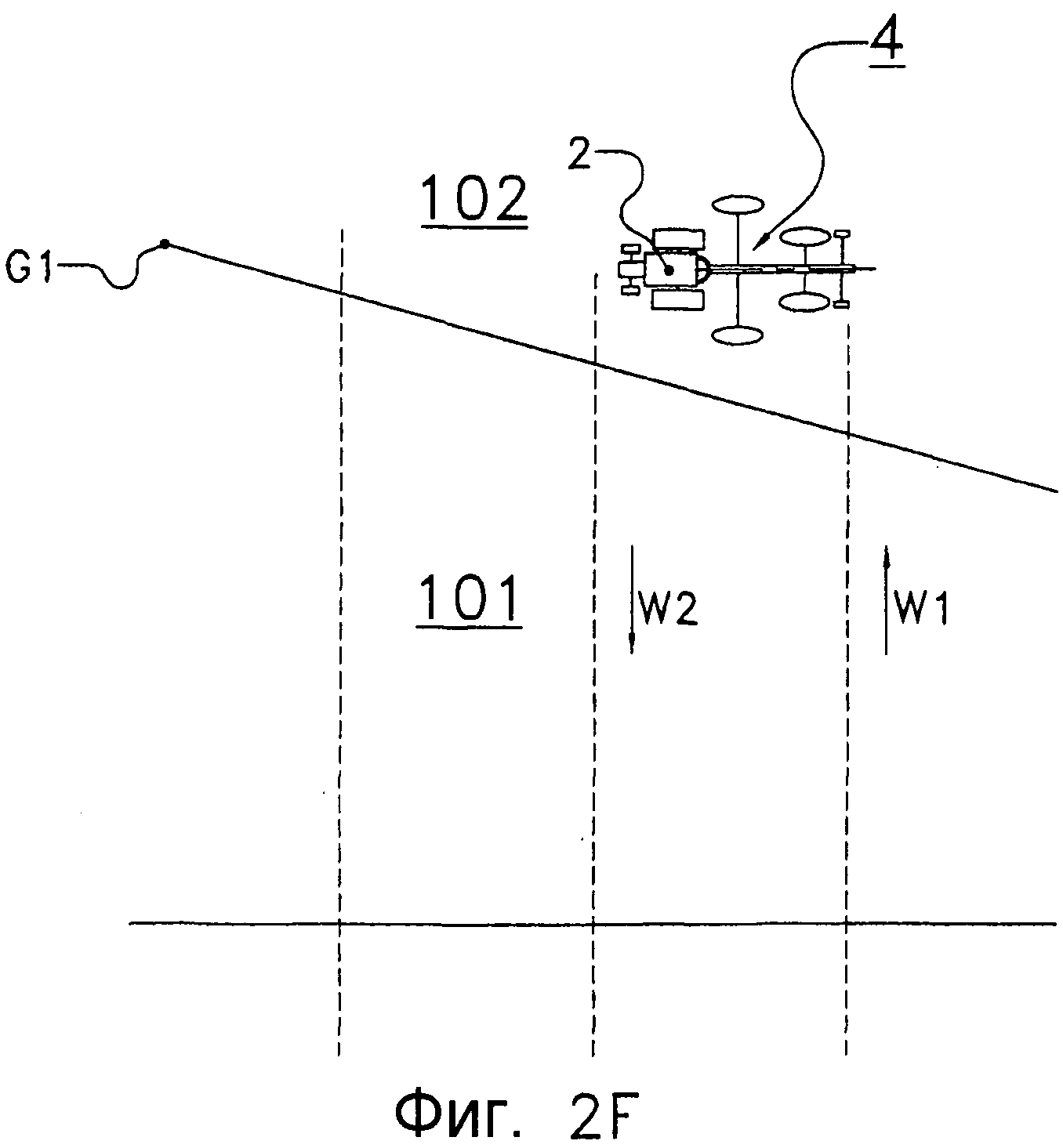
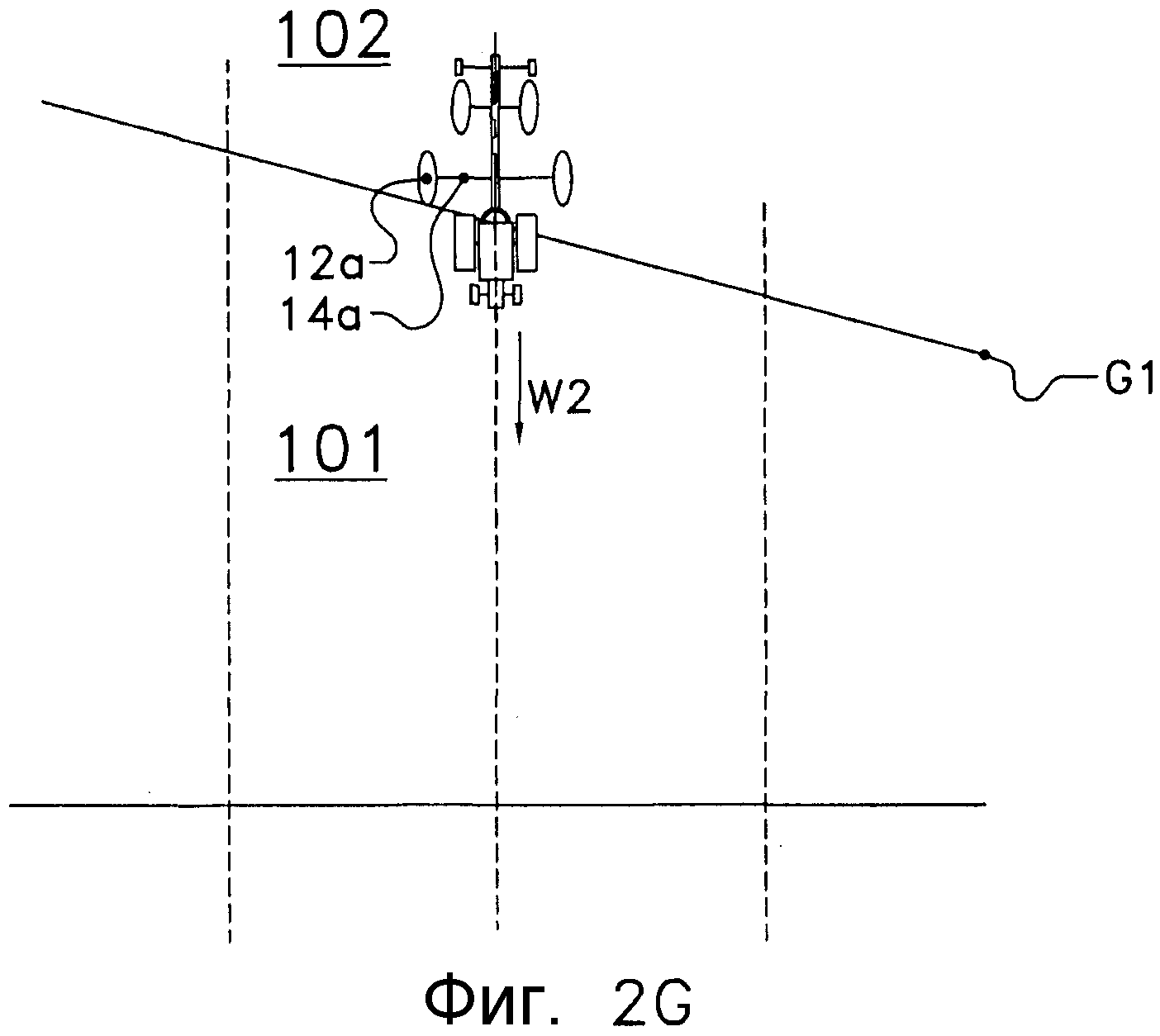
Устройство управления 20 аналогичным образом последовательно действует в отношении третьих круговых грабель 13а и четвертых круговых грабель 13b (см. фиг. 2D и 2E). Теперь грабельные устройства 4 не соприкасаются с поверхностью земли и могут перемещаться над поворотной полосой 102, не трогая лежащий на ней валок (фиг. 2F).
Временная последовательность, относящаяся к пересечению граничной линии G1, хранится в памяти узла управления.
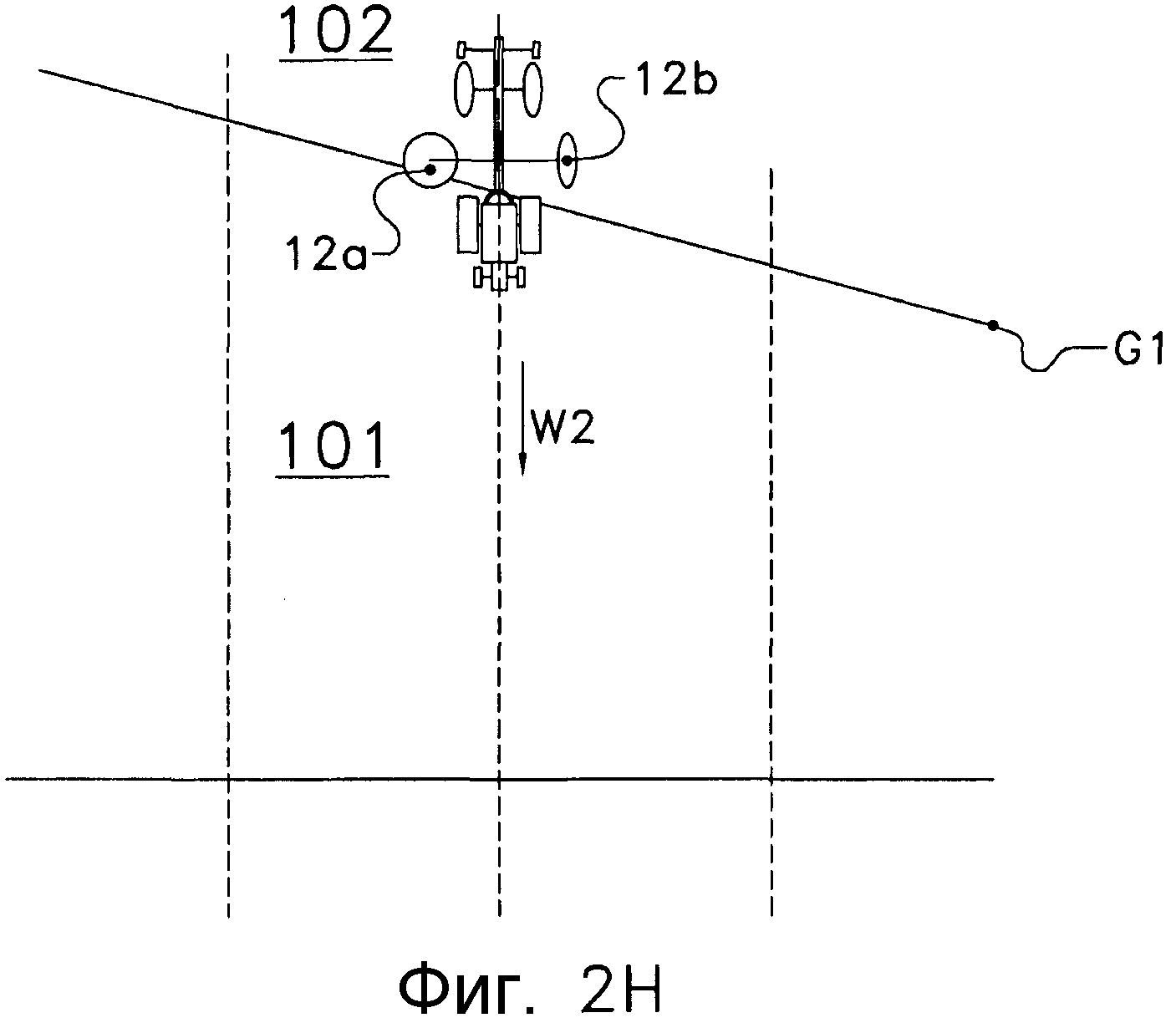
Перед началом следующего, возвратного, рабочего хода в направлении W2 следует снова привести в действие круговые грабли 12а, как и в процессе первого хода, для чего водитель вновь нажимает кнопку 23 на панели управления. Устройство управления 20 настроено таким образом, чтобы применить в этом случае последовательность действий, заранее заложенных в память, непосредственно перед пересечением граничной линии G1.
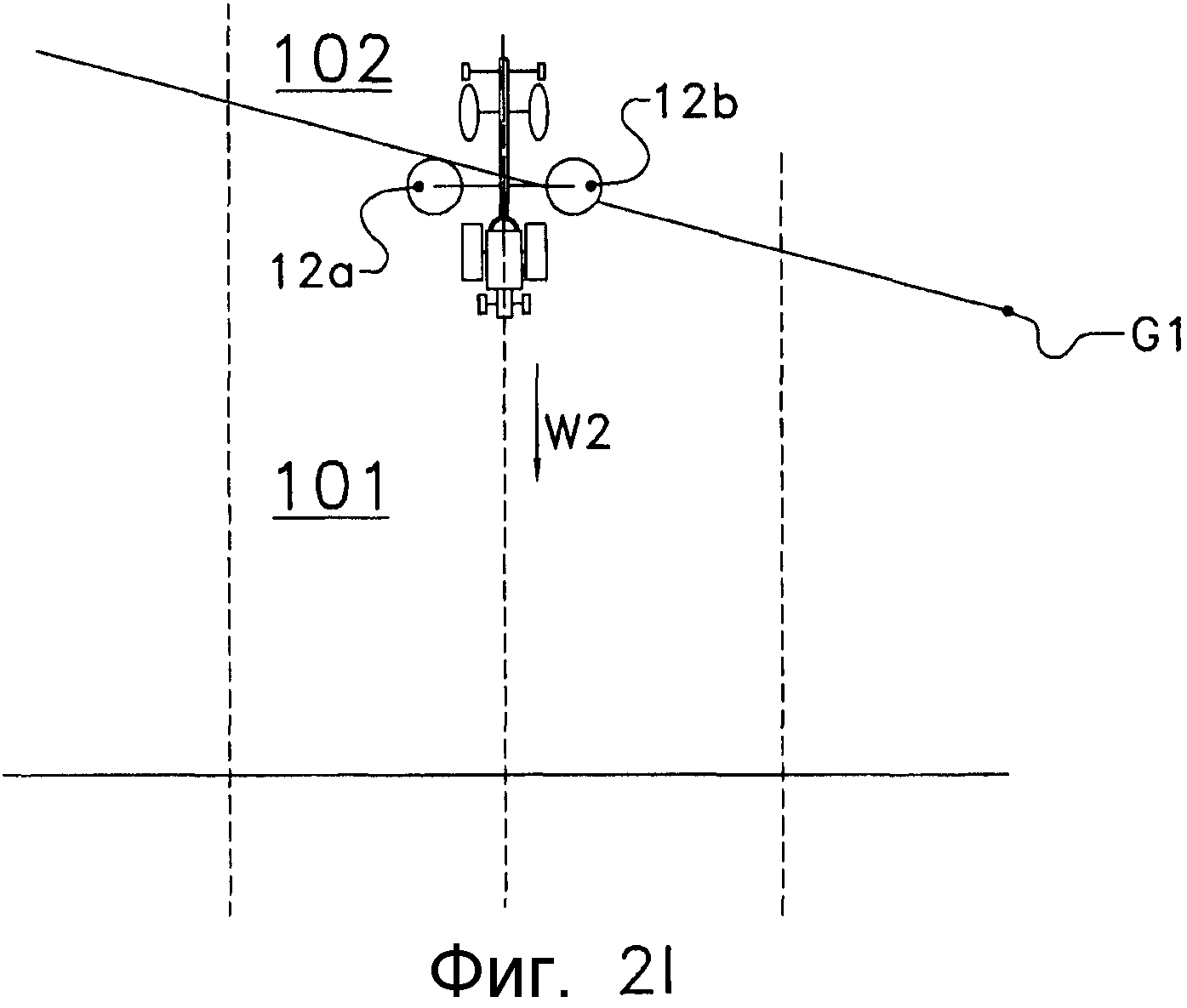
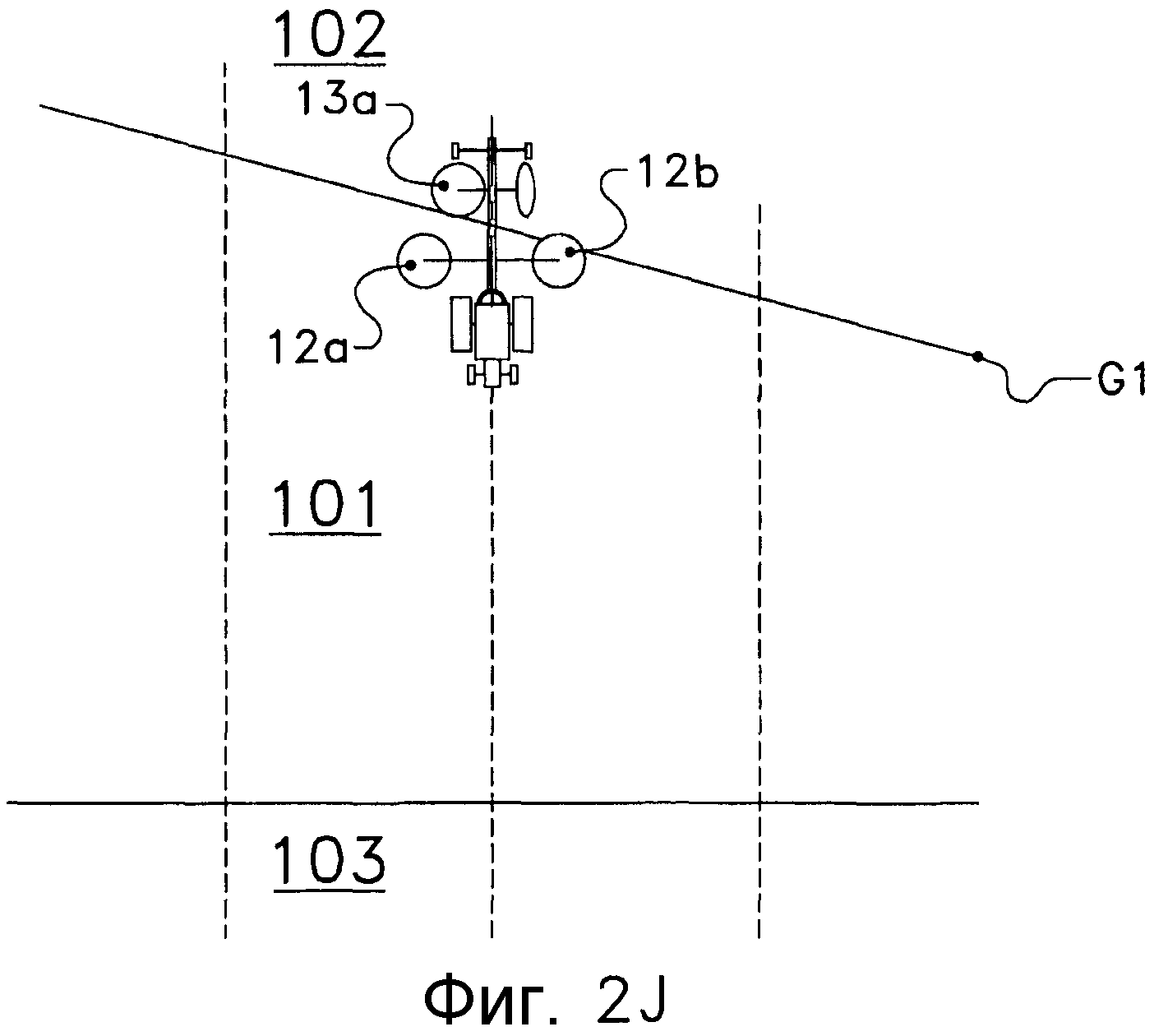
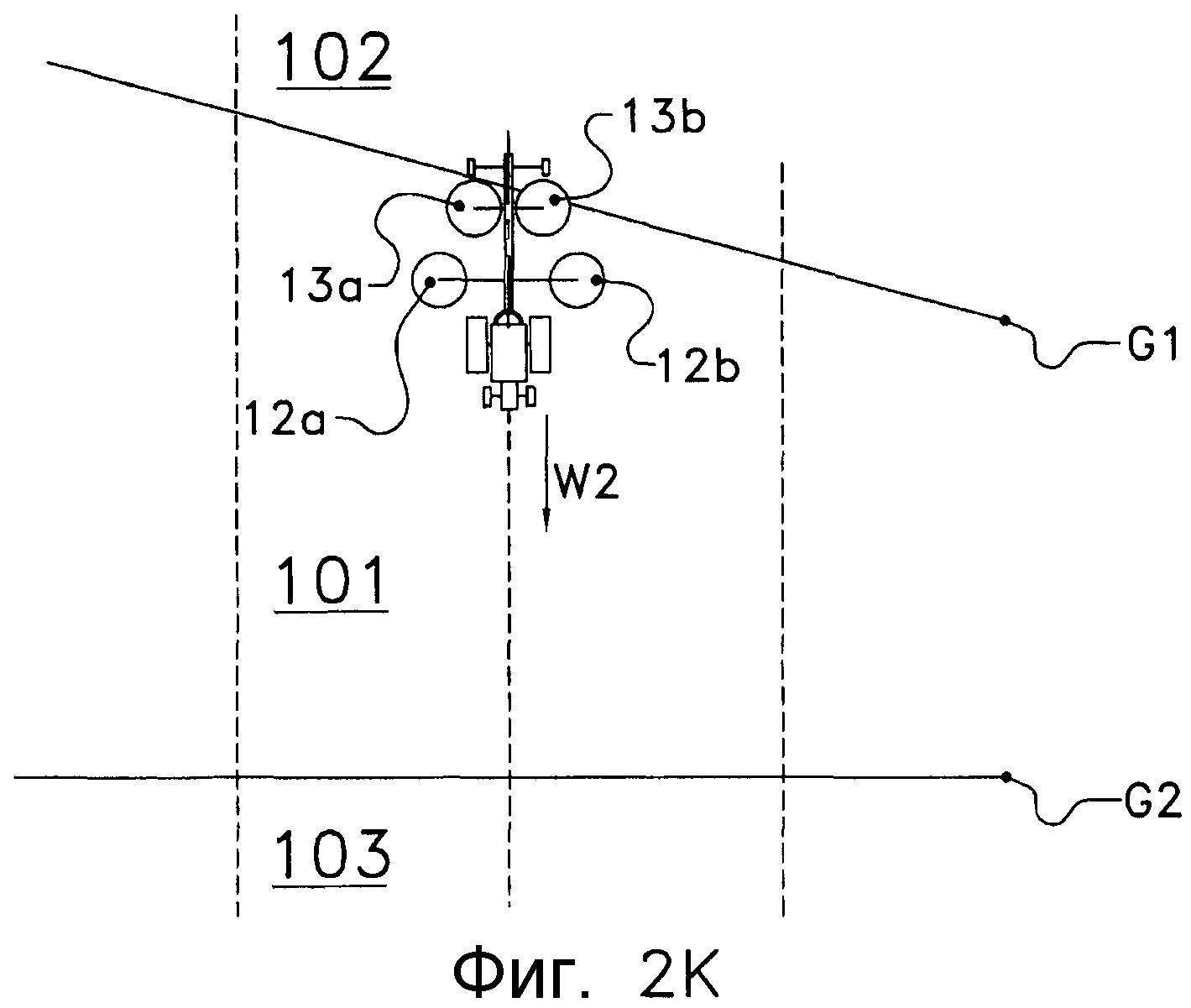
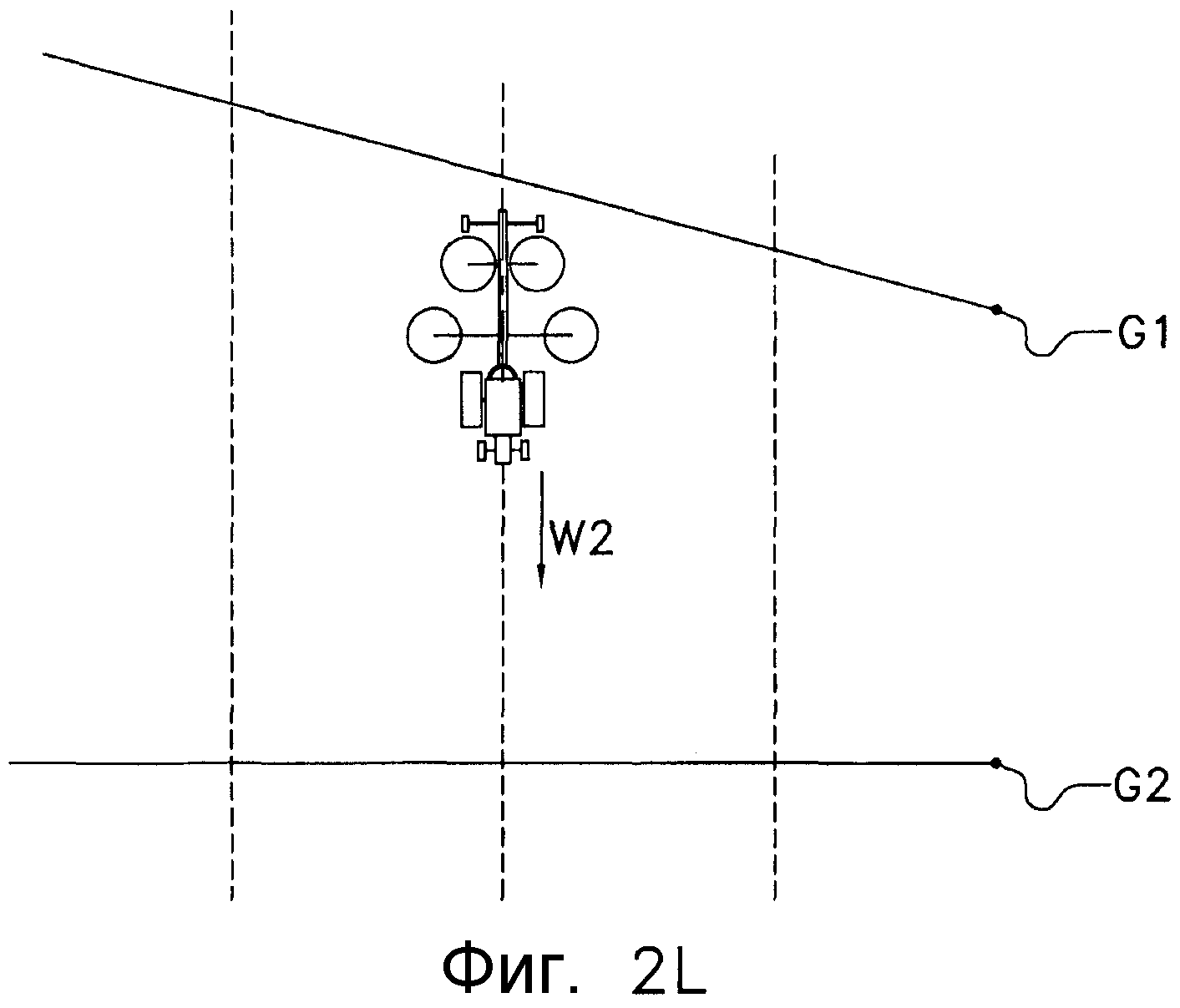
Узел управления 20, таким образом, заставляет цилиндр 16а снова выдвинуться, чтобы опять повернуть поворотный рычаг 14а вниз и достичь положения, проиллюстрированного на фиг. 2H, после чего цилиндр 16b приводит круговые грабли 12b в рабочее положение (см. фиг. 2I). Затем узел управления 20 действует аналогичным образом на третьи круговые грабли 13a и четвертые круговые грабли 13b (см. фиг. 2J и 2K). Теперь грабельное устройство 4 полностью готово к работе по сгребанию сельскохозяйственной культуры, следуя по направлению к поворотной полосе 103 (фиг. 2L).
У граничной линии G2 происходит процедура, соответствующая выполненной около граничной линии G1, однако основывается она на угле «бета», значение которого введено в узел управления. Водитель трактора 2 снова приводит в действие узел управления 20 кнопкой 23, чтобы приподнять круговые грабли 12a, в этом случае узел управления 20 также приводит в действие цилиндр 16b, чтобы приподнять круговые грабли 12b, так как угол между граничной линией G2 и линией W2 прямой. Основываясь на вышеупомянутых первых, вторых и третьих данных, узел управления определяет момент, когда следует привести в действие цилиндры 17a, b, и воздействует на них соответствующим образом. Как и в случае с пересечением G1, данная временная последовательность хранится в памяти узла управления и связана с пересечением граничной линии G2.
Согласно одному из вариантов осуществления узел управления 20 может записывать события, связанные с приведением в действие цилиндров 16a, b и 17a, b при пересечении граничных линий G1 и G2: подъем у граничной линии G1, опускание у граничной линии G1, подъем у граничной линии G2 и опускание у граничной линии G2. Когда устройство, перемещающееся по основной площади 101 в направлении W1, снова прибывает к граничной линии G1, узел управления автоматически выполняет заранее заданную и заложенную в память (временную) последовательность действий для G1 и т. д. Если угол между G2 и W2 не прямой, у граничной линии G2 процедура соответствует выполняемой для G1, но с учетом конкретного значения угла «бета».
Если скорость при въезде на поворотную полосу существенно отличается от скорости при выезде с поворотной полосы, водитель может отключить автоматическое выполнение предыдущей (временной) последовательности, например, быстро нажав два раза кнопку 23, а затем нажать ее один раз. После такого прерывания узел управления оказывается в режиме, в котором вновь определяются данные скорости, которые используются для задания (временной) последовательности.
Водитель может осуществить сопоставимое с этим вмешательство и в другие моменты, например, если фактическая скорость слишком сильно отличается от скорости, заложенной в память узла управления для соответствующей граничной линии, при пересечении соответствующей граничной линии в процессе выполнения нормального первого рабочего хода. Водитель также может решить, следует ли заново определять скорость и, следовательно, вторые данные при каждом последующем пересечении.
Может случиться так, что W1 и/или W2 изменятся в процессе работы. В этом случае можно использовать компас системы навигации (см. также вышеупомянутую угловую диаграмму). Узел управления определяет углы между фактическими направлениями движения W1, 2 и севером, сравнивает их с исходным заданным углом «гамма» и рассчитывает поправку относительно исходных введенных значений углов «альфа» и «бета».
В частности, в случае, когда углы альфа и/или бета достаточно острые, в идеальном варианте осуществления узел управления может принять во внимание фактическое поперечное расстояния от осевых линий роторов, в данном случае - R1 и R2, до продольной осевой линии S, используя данные вышеупомянутых измерителей расстояния.
Если граничные линии имеют отрезки по длине, расположенные под разными углами, то соответствующие данные об углах можно вводить в узел управления по отдельности. В этом случае панель управления дает водителю возможность выбирать для узла управления рассматриваемый отрезок граничной линии.
Согласно другому варианту осуществления водителю не нужно самостоятельно оценивать величину угла «альфа» между W1 и G1. Трактор снабжен навигационным оборудованием на основе системы GPS, которое содержит план обрабатываемого поля, из которого узнают требуемые углы. Данный вариант осуществления может предусматривать автоматический или полуавтоматический подъем и опускание, и в случае автоматической работы вмешательство водителя не требуется. Узел управления сам наблюдает за приближением к граничной линии и самостоятельно запускает процесс подъема или опускания. При полуавтоматической работе узел управления также самостоятельно наблюдает за приближением к граничной линии, а затем посылает водителю сигнал, после чего водитель может запустить процесс подъема или опускания. Благодаря навигационной системе GPS узел управления имеет информацию в реальном времени о направлении W1, 2 и скорости трактора, вторые данные, так что четвертые данные о базовой линии в данном варианте осуществления являются излишними.
Если сеноуборочное устройство не поворачивается на 180° на поворотной полосе, а имеет такую конструкцию, что возвратный рабочий ход можно выполнять задним ходом, то узел управления может хранить в памяти обратную последовательность подъема инструментов.
Вышеупомянутое описание служит для иллюстрации работы предпочтительных вариантов осуществления изобретения и не ограничивает объем изобретения. На основе приведенного выше объяснения специалист в данной области техники легко может понять, что существует множество вариантов в рамках сущности и объема изобретения.
Реферат
Изобретение относится к области сельскохозяйственного машиностроения, в частности к сеноуборочным устройствам. Сеноуборочное устройство содержит раму с по меньшей мере первым и вторым грабельными инструментами для смещения сельскохозяйственной культуры. Грабельные инструменты расположены бок о бок и переводятся из рабочего положения в положение ожидания и обратно с помощью первого и второго средств переключения. Средства переключения могут быть приведены в действие независимо друг от друга посредством программируемого узла управления. Узел управления может обрабатывать первые данные, показывающие угол между направлением перемещения устройства по полю в процессе выполнения рабочего хода и по меньшей мере одной граничной линией. Узел управления может обрабатывать вторые данные, показывающие скорость устройства в направлении движения и приводить в действие средства переключения одно за другим, в зависимости от первых и вторых данных, по прибытии к по меньшей мере одной граничной линии. Таким конструктивным решением обеспечивается эффективная работа устройства. 14 з.п. ф-лы, 15 ил.
Комментарии