Система и способ управления траекторией транспортного средства, используемого с уборочной машиной - RU2552960C2
Код документа: RU2552960C2
Чертежи


Описание
УРОВЕНЬ ТЕХНИКИ
Настоящее изобретение, в общем, относится к системе и способу координации работы транспортного средства и уборочной машины, участвующих в операции «разгрузки на ходу». Более конкретно, изобретение относится к системе и способу управления для управления траекторией транспортного средства относительно уборочной машины во время операции «разгрузки на ходу».
Комбайны или уборочные машины подбирают сельскохозяйственный материал, обрабатывают сельскохозяйственный материал, например, удаляют какие-либо нежелательные части или остатки и выгружают сельскохозяйственный материал. Уборочные машины могут выгружать сельскохозяйственный материал либо непрерывно, как в случае с кормоуборочным комбайном, либо после промежуточного хранения, как в случае с зерноуборочным комбайном, в транспортное средство или в транспортную тележку. Транспортным средством может быть трактор или автомобильный тягач, тянущий тележку, фургон или прицеп, или автомобильный тягач или другое транспортное средство, способное транспортировать убранный сельскохозяйственный материал. Убранный сельскохозяйственный материал выгружают в транспортное средство с помощью устройства для выпуска или выгрузки сельскохозяйственной культуры, такого как желоб или разгрузочный шнек, связанный с уборочной машиной.
Во время операции «разгрузки на ходу» уборочной машины, убранный сельскохозяйственный материал перемещается из уборочной машины в транспортное средство во время движения обоих транспортных средств. Во время операции разгрузки на ходу транспортное средство может двигаться рядом и/или позади уборочной машины. Для кормоуборочного комбайна необходима операция разгрузки на ходу, поскольку кормоуборочный комбайн непрерывно выгружает убранный сельскохозяйственный материал. Несмотря на то, что операция разгрузки на ходу не является необходимой для зерноуборочного комбайна благодаря возможности промежуточного хранения зерноуборочного комбайна, операция разгрузки на ходу широко используется для зерноуборочного комбайна с целью максимизации рабочей эффективности зерноуборочного комбайна.
Для эффективной операции разгрузки орудия на ходу, работу уборочной машины и транспортного средства координируют с целью сохранения относительной дистанции между уборочной машиной и транспортным средством в пределах приемлемого диапазона. За счет сохранения относительной дистанции уборочной машины и транспортного средства в пределах приемлемого диапазона, положение и ориентация разгрузочного желоба уборочной машины и положение транспортного средства, конкретно части транспортного средства, принимающей сельскохозяйственный материал, относительно положения разгрузочного желоба уборочной машины сохраняется в пределах приемлемого диапазона дистанций, обеспечивая возможность операции разгрузки на ходу уборочной машины, т.е. выгружаемый сельскохозяйственный материал может быть предоставлен в транспортное средство без потери на землю. Другими словами, выгружаемый сельскохозяйственный материал направляется для накопления в транспортном средстве, и по существу предотвращается его неправильное направление с пролетом мимо транспортного средства и скапливание на земле, что приводит к пустой растрате или потере сельскохозяйственного материала. Для того, чтобы сохранять приемлемый диапазон дистанций между уборочной машиной и транспортным средством, как боковую (поперечную) дистанцию, так и продольную (по длине) дистанцию между уборочной машиной и транспортным средством необходимо сохранять в пределах приемлемых диапазонов.
Некоторые системы управления, используемые для операций разгрузки на ходу, могут определять положение транспортного средства, как функцию положения уборочной машины плюс одно или более заданных смещений. Несмотря на то, что, когда уборочная машина движется по прямой линии, данный тип системы управления может быть эффективным, неприемлемые отклонения дистанции могут возникать, когда уборочная машина внезапно изменяет положение, и система управления не может регулировать положение транспортного средства достаточно быстро, чтобы избежать потери сельскохозяйственного материала.
Вследствие этого, для предотвращения неприемлемых отклонений дистанции между транспортным средством и уборочной машиной необходимы система и способ управления траекторией транспортного средства во время операции разгрузки на ходу.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение направлено на систему и способ управления траекторией транспортного средства, чтобы следовать траектории уборочной машины во время операции разгрузки на ходу.
В частности, изобретение направлено на способ управления траекторией транспортного средства во время операции разгрузки на ходу с уборочной машиной. Способ включает приведение уборочной машины в движение вдоль неизвестной траектории движения, определение положения и скорости для уборочной машины, определение положения и скорости для транспортного средства и определение положения выгрузной трубы для уборочной машины. Способ дополнительно включает расчет точек будущей траектории для уборочной машины, используя установленные положение и скорость для уборочной машины, и расчет траектории для транспортного средства, используя рассчитанные точки будущей траектории, установленное положение выгрузной трубы, установленные положение и скорость транспортного средства и установленные положение и скорость уборочной машины. Способ также включает управление транспортным средством, чтобы следовать по рассчитанной траектории с помощью команд контроллера.
Способ также может включать измерение скорости рыскания для уборочной машины и расчет точек будущей траектории для уборочной машины, используя установленные положение и скорость, и скорость рыскания уборочной машины. Положение выгрузной трубы может быть определено в показателях дистанции бокового смещения и дистанции продольного смещения от дистального конца выгрузной трубы до установленного положения уборочной машины.
Изобретение дополнительно направлено на систему управления для управления траекторией транспортного средства во время операции разгрузки на ходу с уборочной машиной. Система управления содержит первое устройство глобальной системы позиционирования для определения положения и скорости для уборочной машины и второе устройство глобальной системы позиционирования для определения положения и скорости транспортного средства. Система управления также содержит настраиваемый параметр, соответствующий пространственной конфигурации выгрузной трубы. Настраиваемый параметр используется для определения положения выгрузной трубы для уборочной машины. Система управления дополнительно содержит первый контроллер с микропроцессором для выполнения первой компьютерной программы для расчета множества точек прогнозируемой будущей траектории для уборочной машины, используя положение и скорость уборочной машины от первого устройства глобальной системы позиционирования и скорость рыскания уборочной машины. Система управления также содержит второй контроллер с микропроцессором для выполнения второй компьютерной программы для расчета траектории транспортного средства, используя положение и скорость уборочной машины от первого устройства глобальной системы позиционирования, положение и скорость транспортного средства от второго устройства глобальной системы позиционирования, установленное положение выгрузной трубы и множество точек прогнозируемой будущей траектории от первого контроллера.
Система управления также содержит датчик скорости рыскания для определения скорости рыскания, т.е. угловой скорости поворота, уборочной машины. Настраиваемый параметр имеет значение, которое можно отрегулировать для различных размеров выгрузной трубы, таких как различные длины выгрузной трубы и т.д.
Изобретение также направлено на способ расчета точек прогнозируемой будущей траектории для уборочной машины, имеющей неизвестную траекторию движения. Способ включает получение положения от глобальной системы позиционирования, скорости от глобальной системы позиционирования и скорости рыскания для уборочной машины и расчет прогнозируемой траектории для уборочной машины, используя полученное положение от глобальной системы позиционирования, скорость от глобальной системы позиционирования и скорость рыскания. Способ дополнительно включает получение предварительно заданного интервала дистанций и предварительно заданного числа точек траектории и расчет точек прогнозируемой будущей траектории для уборочной машины, используя рассчитанную прогнозируемую траекторию, предварительно заданный интервал дистанций и предварительно заданное число точек траектории.
Изобретение дополнительно направлено на систему для генерирования точек прогнозируемого будущего положения на траектории для уборочной машины, имеющей неизвестную траекторию движения. Система содержит устройство глобальной системы позиционирования для определения положения и скорости для уборочной машины, множество датчиков и блок расчета точек траектории. Для измерения рабочих параметров уборочной машины задействовано множество датчиков. Блок расчета точек траектории находится во взаимодействии с устройством глобальной системы позиционирования для получения установленных положения и скорости для уборочной машины и находится во взаимодействии с множеством датчиков для получения измеренных рабочих параметров уборочной машины. В дополнение, блок расчета точек траектории задействован для генерирования множества точек прогнозируемого будущего положения на траектории для уборочной машины, используя установленное положение и скорость уборочной машины и измеренные рабочие параметры уборочной машины.
Один вариант осуществления изобретения относится к способу управления траекторией транспортного средства во время операции разгрузки на ходу с уборочной машиной. Способ включает определение точек будущего положения на траектории для траектории уборочной машины и определение положения выгрузной трубы для уборочной машины, определение положения, и скорости от глобальной системы позиционирования для транспортного средства и положения и скорости от глобальной системы позиционирования для уборочной машины. Способ также включает расчет траектории для транспортного средства, используя точки будущего положения на траектории для траектории уборочной машины, положение выгрузной трубы для уборочной машины, положение и скорость от глобальной системы позиционирования для уборочной машины, и положение, и скорость от глобальной системы позиционирования для транспортного средства. Способ дополнительно включает предоставление контроллеру рассчитанной траектории для транспортного средства и управление транспортным средством, чтобы следовать рассчитанной траектории с помощью команд контроллера.
Одним преимуществом изобретения является возможность обеспечения большему числу фермеров осуществления операций разгрузки на ходу в результате скоординированного управления транспортным средством и уборочной машиной, что снижает уровень мастерства, требующийся оператору транспортного средства.
Другие признаки и преимущества изобретения будут очевидны из следующего более подробного описания иллюстративных вариантов его осуществления, сделанного в сочетании с сопровождающими чертежами.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
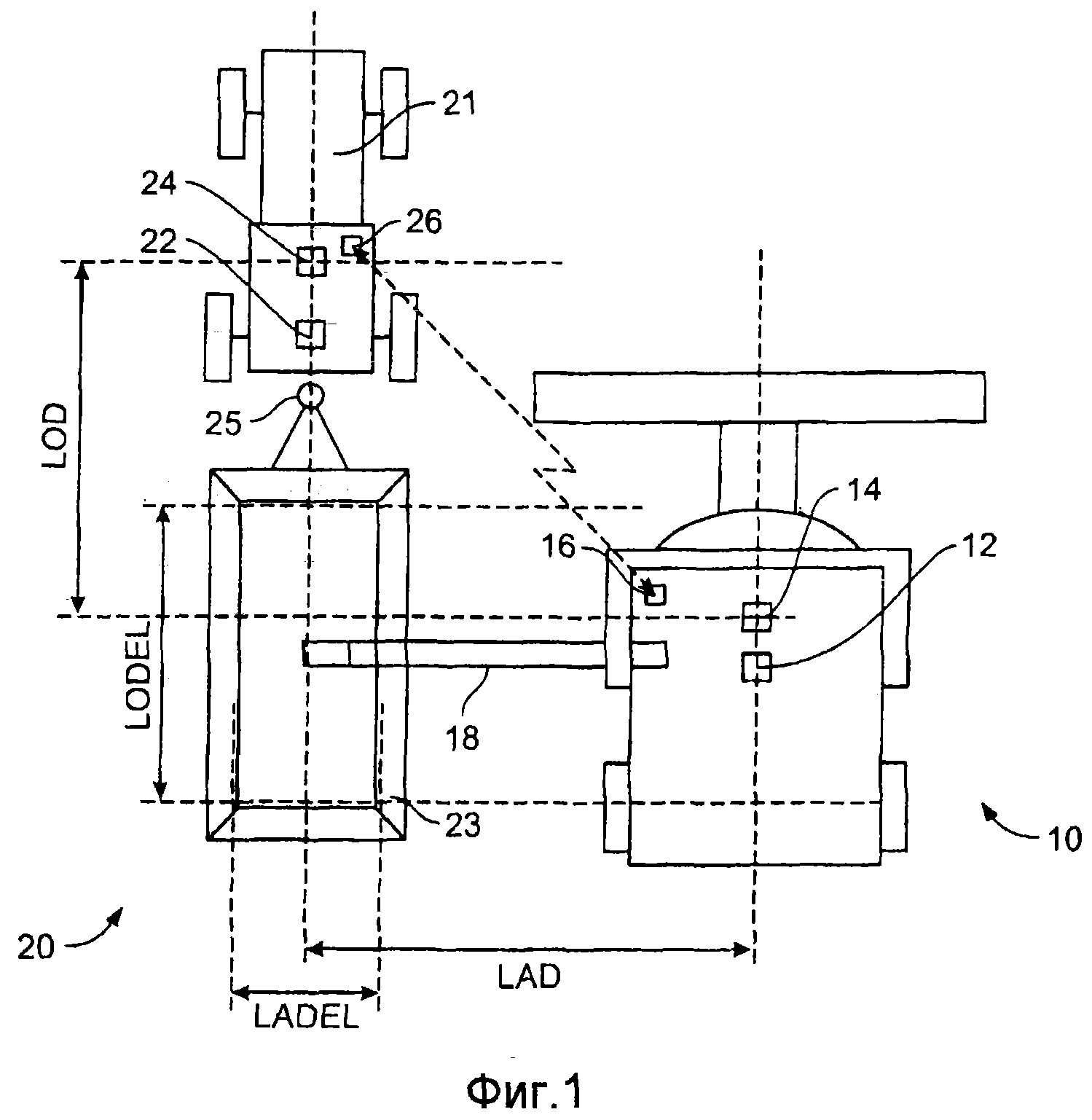
ФИГ.1 показывает схематичный вид сверху варианта осуществления уборочной машины и транспортного средства во время операции разгрузки на ходу.
ФИГ.2 показывает вид сзади варианта осуществления уборочной машины и транспортного средства во время операции разгрузки на ходу.
ФИГ.3 и 4 показывают варианты осуществления траекторий уборочной машины с точками траектории.
ФИГ.5 схематично показывает вариант осуществления контроллера для уборочной машины.
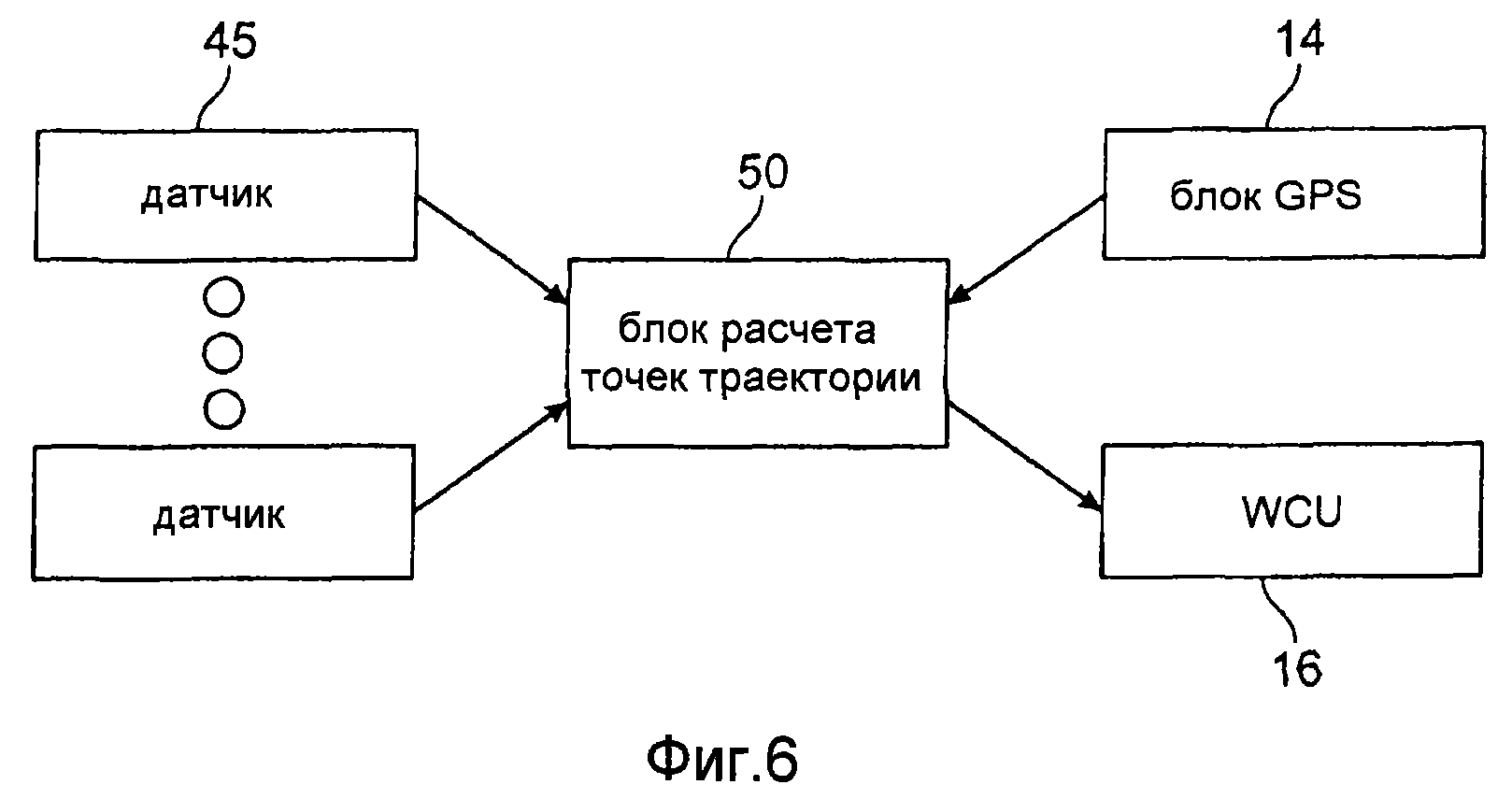
ФИГ.6 схематично показывает вариант осуществления системы для расчета точек траектории уборочной машины.
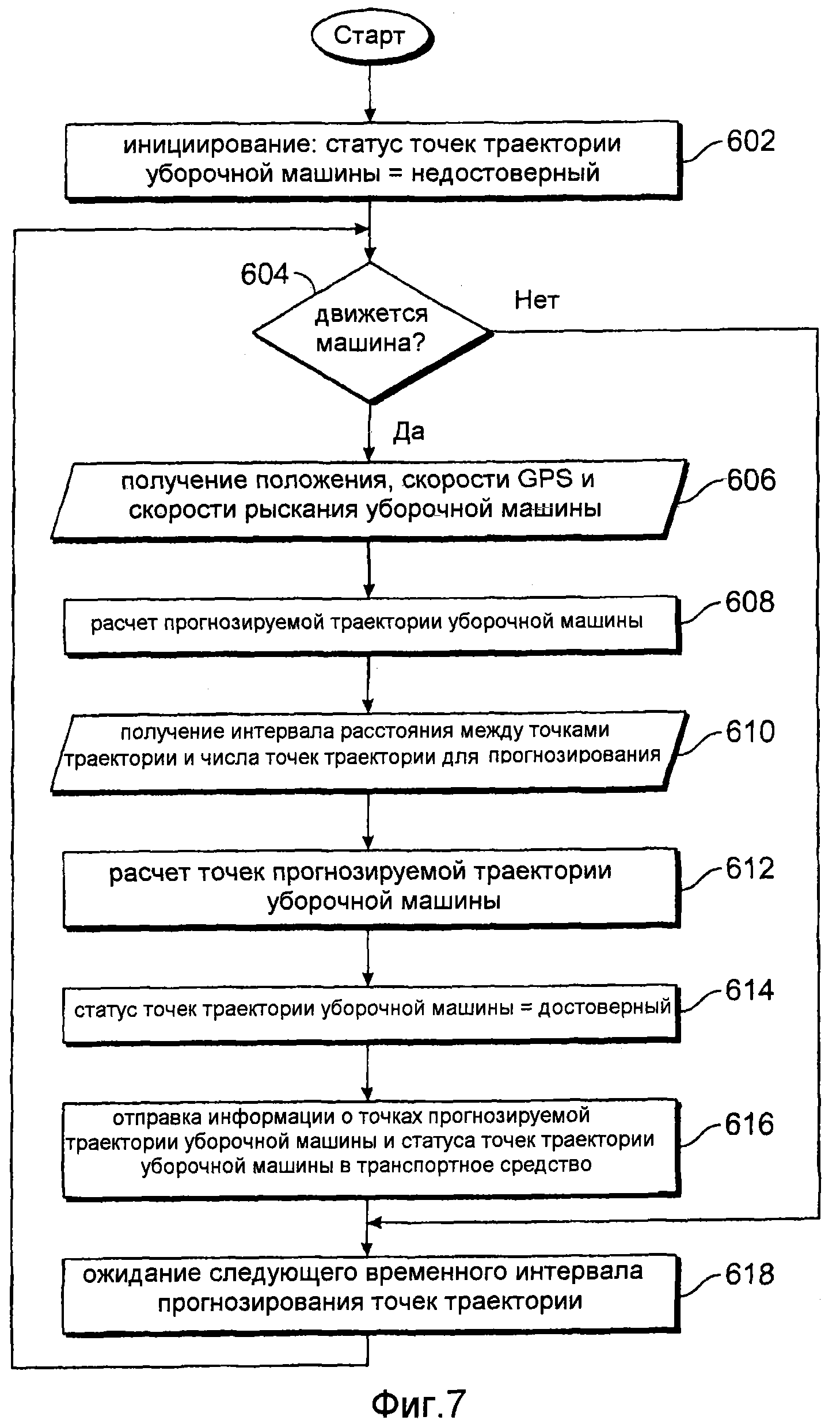
ФИГ.7 показывает блок-схему варианта осуществления способа расчета точек траектории для уборочной машины.
Везде, где возможно, одни и те же ссылочные позиции будут использоваться на всех чертежах для ссылки на одни и те же или аналогичные детали.
ПОДРОБНОЕ ОПИСАНИЕ ИЛЛЮСТРАТИВНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
В представленной заявке, операция транспортное средство-транспортное средство (V2V) относятся к операции разгрузки на ходу, а комбайн V2V и трактор V2V относится к уборочной машине и транспортному средству, выполняющим операцию разгрузки на ходу.
ФИГ.1 и 2 показывают относительные положения уборочной машины 10 и транспортного средства 20 в процессе разгрузки на ходу или операции V2V. В одном иллюстративном варианте осуществления, одной или обеими из уборочной машины или комбайна 10 V2V и транспортного средства или трактора 20 V2V можно управлять с помощью глобальной системы позиционирования (GPS) на основании самонаводящейся системы (систем) управления для того, чтобы сохранять необходимую боковую дистанцию (LAD) и необходимую продольную дистанцию (LOD) между уборочной машиной 10 и транспортным средством 20.
На ФИГ.1 показан иллюстративный вариант осуществления контрольных точек, используемых для измерения требуемой или намеченной боковой дистанции и требуемой или намеченной продольной дистанции. Однако для измерения боковой дистанции и продольной дистанции могут быть использованы любые подходящие контрольные точки. Требуемой боковой дистанцией, как и требуемой продольной дистанцией может быть предварительно выбранная дистанция плюс или минус заданное смещение, которое обеспечивает, чтобы транспортное средство 20 принимало и сохраняло сельскохозяйственный материал, выгружаемый из уборочной машины 10. Как показано на ФИГ.1, пределы погрешности боковой дистанции (LADEL) вместе с необходимой боковой дистанцией (LAD) определяют максимальную и минимальную боковые дистанции, которые могут быть использованы для операции разгрузки на ходу. Определенные максимальное и минимальное боковые дистанции могут составлять LAD плюс и минус половину диапазона LADEL. Как дополнительно показано на ФИГ.1, пределы погрешности продольной дистанции (LODEL) вместе с необходимой продольной дистанцией (LOD) аналогичным образом определяют максимальную и минимальную продольные дистанции, которые могут быть использованы для операции разгрузки на ходу. Предварительно выбранные или требуемые боковая и продольная дистанции и соответствующие заданные смещения могут быть связаны с конкретными используемыми уборочными машинами и транспортными средствами, а конкретно с расстоянием от дистального конца разгрузочного желоба уборочной машины до центральной линии уборочной машины, размером области хранения в транспортном средстве и оценкой расстояния выброса сельскохозяйственного материала из разгрузочного желоба уборочной машины в транспортное средство.
Уборочная машина 10 может иметь: контроллер 12, который содержит дисплейное устройство или пользовательский интерфейс и навигационный контроллер; устройство GPS 14, которое содержит антенну и приемник; и блок или устройство 16 беспроводной связи (WCU), которое содержит переключатель регулировки мощности. Аналогичным образом, транспортное средство 20 может иметь: контроллер 22, который содержит дисплейное устройство или пользовательский интерфейс, навигационный контроллер и блок управления трактором (TV2V); устройство GPS 24, которое содержит антенну и приемник; и блок или устройство 26 беспроводной связи (WCU), которое содержит переключатель регулировки мощности. Контроллеры могут использоваться для управления работой и/или маневрированием и/или скоростью уборочной машины 10 и/или транспортного средства 20, независимо от машины, в которой может быть установлен контроллер. Устройство GPS может быть использовано для определения положения уборочной машины 10 или транспортного средства 20, а беспроводное устройство связи может быть использовано для отправки и получения информации, данных и управляющих сигналов между уборочной машиной 10 и транспортным средством 20. В одном варианте осуществления, в принимающей области транспортного средства, например, прицепа для зерна может быть расположена дополнительная GPS антенна. В еще одном варианте осуществления, блок управления TV2V может выполнять одну или более компьютерных программ для работы системы управления продольным положением для транспортного средства. Блок управления TV2V также может быть встроен в самонаводящуюся систему управления, основанную на GPS.
В иллюстративном варианте осуществления, показанном на ФИГ.1, транспортное средство 20 может содержать тяговое устройство 21 и загружаемое вместилище 23. Датчик 25 угла сцепки может быть использован для определения относительного угла или угла сцепки между тяговым устройством 21 и загружаемым вместилищем 23. Как показано на ФИГ.1, тяговым устройством 21 может быть трактор, а загружаемым вместилищем 23 может быть фургон или прицеп для зерна. Однако, в других вариантах осуществления, тяговым устройством 21 может быть автомобильный тягач или другое самодвижущееся транспортное средство, подходящее для транспортировки загружаемого вместилища 23, а загружаемым вместилищем 23 может быть бункер или другое аналогичное средство для хранения/транспортировки. В еще одном варианте осуществления, транспортным средством 20 может быть автомобильный тягач, автомобильный тягач с полуприцепом, трактор с прицепом или другое аналогичное самодвижущееся транспортное средство с контейнером.
Далее, как показано на ФИГ.2, уборочная машина 10 имеет выгрузную трубу или желоб 18, расположенный в поперечном направлении и полностью развернутый во время выгрузки сельскохозяйственного материала 100 через выгрузной кожух 30 в транспортное средство 20. Кожух 30 может иметь любую удобную и подходящую форму. В одном иллюстративном варианте осуществления, кожух 30 может быть в целом цилиндрическим, но может быть более коробообразным с кромками или соплообразным и т.д. Отверстие выгрузной трубы или желоба 18 на своем дистальном конце герметично закрыто по периферии с помощью соединительного элемента 11, который шарнирно зацепляет участок 32 кожуха 30, причем данный участок 32 состыкован с дистальным концом выгрузной трубы или желоба 18. Соединительный элемент 11 может быть округлым или сферическим, но также может быть цилиндрическим на горизонтальной оси, при условии, что в должной мере герметично закрыта поверхность раздела между трубой или желобом 18 и кожухом 30. От участка 32 кожуха 30 под углом расположен выпускной конец 31 кожуха 30. Сигналы от контроллера 12 уборочной машины 10 проходят по электромонтажным трубкам 47 для управления исполнительными механизмами 40, причем данные исполнительные механизмы 40 могут шарнирно перемещать кожух 30 вверх и вниз и назад и вперед с шарнирным взаимным расположением относительно выгрузной трубы или желоба 18 посредством сферического соединения 11. Соединение 11 также служит для герметизации поверхности раздела на участке 32 кожуха 30.
Контроллеры 12, 22 могут содержать микропроцессор, энергонезависимое запоминающее устройство, интерфейсную плату, аналогово-цифровой (A/D) преобразователь и цифроаналоговый (D/A) преобразователь для управления работой уборочной машины 10 и/или транспортного средства 20. Контроллеры 12, 22 могут выполнять один или более алгоритмов управления для управления работой, направлением и/или маневрированием уборочной машины 10 и/или транспортного средства 20, для управления скоростью транспортного средства 20 и/или уборочной машины 10 и для осуществления управления желобом уборочной машины. В одном варианте осуществления, алгоритмом (алгоритмами) управления могут быть компьютерные программы или программное обеспечение, хранящиеся в энергонезависимой памяти контроллеров 12, 22, и которые могут содержать последовательности команд, выполняемых соответствующим микропроцессором контроллеров 12, 22. Несмотря на то, что предпочтительно, чтобы алгоритм управления был заключен в компьютерной программе (программах) и выполнялся микропроцессором, должно быть понятно, что алгоритм управления может быть реализован и может выполняться с использованием квалифицированными специалистами в данной области цифрового и/или аналогового аппаратного обеспечения. Если для выполнения алгоритма управления используется аппаратное обеспечение, соответствующая конфигурация контроллеров 12, 22 может быть изменена с включением необходимых составных элементов и с исключением любых составных элементов, которые могут более не потребоваться.
Кроме того, с дисплейным устройством или пользовательским интерфейсом могут быть связаны или встроены контроллеры 12, 22, что обеспечивает оператору уборочной машины 10 или транспортного средства 20 возможность взаимодействия с контроллерами 12, 22. Оператор может выбирать и вводить команды для контроллеров 12, 22 через дисплейное устройство или пользовательский интерфейс. В дополнение, дисплейное устройство или пользовательский интерфейс может отображать сообщения и информацию от контроллеров 12, 22, касающуюся рабочего состояния уборочной машины 10 и/или транспортного средства 20. Дисплейные устройства или пользовательские интерфейсы могут быть расположены поблизости от контроллеров 12, 22 или в качестве альтернативы дисплейные устройства или пользовательские интерфейсы могут быть расположены удаленно от контроллеров 12, 22. В еще одном иллюстративном варианте осуществления, каждый контроллер 12, 22 может содержать один или более субконтроллеров под управлением главного контроллера. Каждый субконтроллер и главный контроллер может быть выполнен аналогично контроллерам 12, 22.
В одном иллюстративном варианте осуществления, контроллеры 12, 22 могут осуществлять систему управления траекторией, которая может автоматически управлять транспортным средством 20, чтобы следовать пути и траектории движения уборочной машины в процессе операций разгрузки на ходу. Система управления траекторией может управлять транспортным средством 20 управляемым образом в процессе операций разгрузки на ходу с сохранением боковой и продольной дистанций между транспортным средством 20 и уборочной машиной 10 в пределах установленных пределов погрешностей дистанций. Для того, чтобы управлять транспортным средством 20, система управления траекторией может предоставлять управляющие сигналы в распределительный клапан рулевого управления для регулирования положения при повороте транспортного средства 20 (и в конечном итоге траектории транспортного средства 20) и получать сигналы от датчика рулевого управления для определения текущего положения при повороте транспортного средства 20.
WCU 16, 26 на уборочной машине 10 и транспортном средстве 20 обеспечивают беспроводную связь между двумя транспортными средствами. Контроллер 12 уборочной машины может беспроводным образом посылать информацию и данные датчика о точках будущего положения уборочной машины на траектории в транспортное средство 20 для информирования и оповещения транспортного средства 20 о текущем состоянии уборочной машины. Контроллер 22 транспортного средства может принимать данные о точках будущего положения уборочной машины на траектории, и генерировать траекторию для транспортного средства 20, которая является параллельной траектории уборочной машины за счет необходимого параметра боковой дистанции или бокового смещения. Затем навигационный контроллер транспортного средства, такой как самонаводящийся контроллер, основанный на GPS, который может быть частью контроллера 22, управляет автоматическим маневрированием транспортного средства 20, чтобы следовать по генерируемой траектории для транспортного средства 20 и, вследствие этого, сохранять необходимую боковую дистанцию между уборочной машиной 10 и транспортным средством 20.
Система управления траекторией может получать некоторую или всю следующую информацию или данные от уборочной машины 10: точки будущего положения (т.е. точки на карте) на траектории или пути уборочной машины 10; текущее положение GPS и скорость уборочной машины 10; относительное положение конца выгрузной трубы, т.е. боковое смещение и продольное смещение конца выгрузной трубы, относительно GPS положения уборочной машины; и информацию датчика уборочной машины, например, текущую скорость уборочной машины (скорость вращения колес или непосредственную скорость), угол поворота уборочной машины, положение торможения уборочной машины и положение дроссельной заслонки уборочной машины. В одном иллюстративном варианте осуществления, система управления траекторией не требует информации о скорости и времени в точках будущего положения на траектории, которая может обеспечить возможность ручного управления скоростью уборочной машины 10 оператором.
Затем система управления траекторией может построить необходимую траекторию транспортного средства на основании точек будущего положения уборочной машины на траектории, положения выгрузной трубы, текущих GPS положения и скорости уборочной машины и текущих GPS положения и скорости транспортного средства. Требуемая траектория транспортного средства отправляется в навигационный контроллер транспортного средства для того, чтобы управлять боковым положением транспортного средства 20 относительно уборочной машины 10. Система управления траекторией также может управлять скоростью транспортного средства для того, чтобы следовать за уборочной машиной 10 с правильным продольным положением, обеспечивая выгрузку сельскохозяйственного материала в транспортное средство 20. Система управления траекторией может использовать информацию о скорости уборочной машины для того, чтобы способствовать управлению скоростью транспортного средства. Если фактическая траектория движения уборочной машины, зарегистрированная посредством сигнала положения GPS, отклоняется от спрогнозированной последний раз траектории на предварительно заданное значение отклонения во время операции разгрузки на ходу, при этом данное предварительно заданное значение отклонения может гарантировать, что расстояние между уборочной машиной 10 и транспортным средством 20 будет ближе или в пределах погрешности, LADEL и/или LODEL, система управления траекторией подает предупредительный сигнал водителю транспортного средства, причем автоматические операции приостанавливаются, т.е. управление транспортным средством 20 возвращается оператору транспортного средства, и вводится безопасный режим работы уборочной машины 10 и транспортного средства 20. Большое отклонение фактической траектории движения уборочной машины от спрогнозированной последний раз траектории может происходить, когда оператор уборочной машины быстро изменяет угол поворота уборочной машины на большое значение. В безопасном режиме работы, выгрузной шнек уборочной машины останавливается, и транспортное средство 20 и/или уборочная машина 10 замедляются. В еще одном иллюстративном варианте осуществления, безопасный режим работы может быть введен, когда беспроводная связь между уборочной машиной 10 и транспортным средством 20 работает неправильно, или когда сигнал GPS не является надежным.
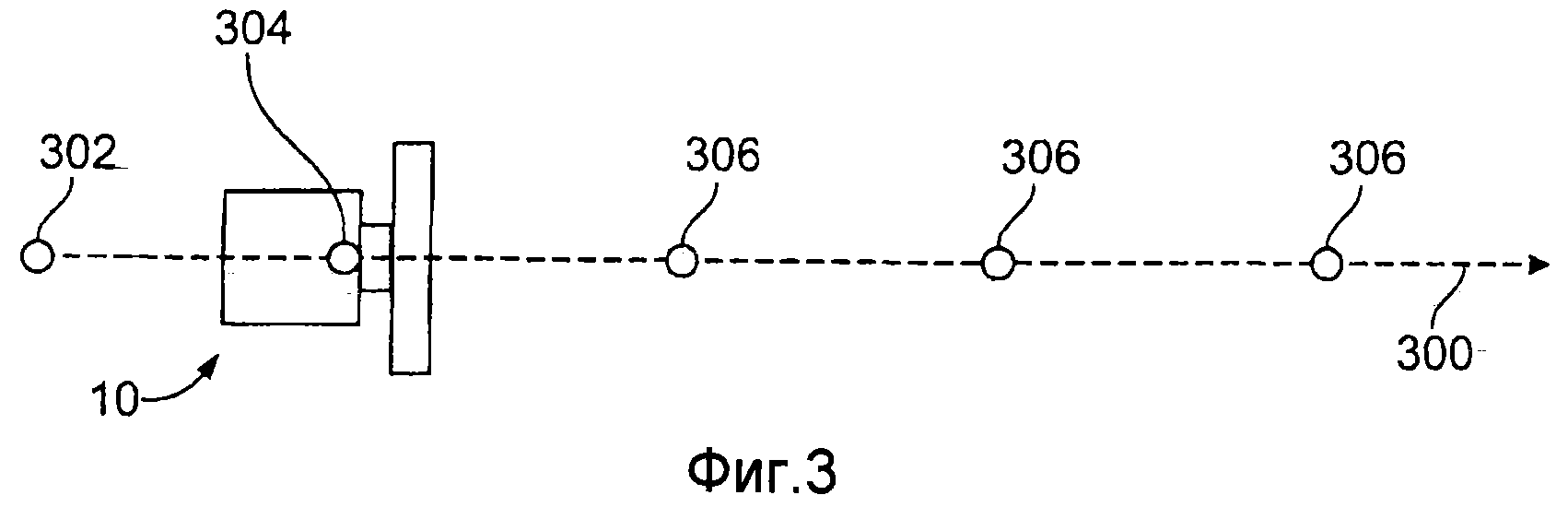
ФИГ.3 и 4 показывают варианты осуществления различных траекторий уборочной машины. ФИГ.3 показывает по существу прямолинейную траекторию уборочной машины или траекторию 300, а ФИГ.4 показывает криволинейную траекторию уборочной машины или траекторию 400. Для криволинейной траектории уборочной машины или траектории 400, скорость 308 рыскания уборочной машины 10 может определяться или измеряться, а радиус поворота уборочной машины может рассчитываться, как соотношение скорости уборочной машины и скорости рыскания. Каждая из траекторий или путей уборочной машины 300, 400 может содержать предшествующие точки 302 траектории, т.е. точки траектории, уже пройденные или пересеченные уборочной машиной 10, текущее положение 304 уборочной машины и точки 306 будущего положения на траектории. Точки 306 будущего положения на траектории или пути 300, 400 уборочной машины могут быть разделены равномерными или неравномерными промежутками вдоль траектории уборочной машины. В дополнение, точки 306 будущего положения на траектории могут определяться относительно размера области, в которой работает уборочная машина 10.
В одном варианте осуществления, точки 306 будущего положения на траектории уборочной машины с некоторой вероятностью известны заранее. Точки 306 будущего положения уборочной машины 10 на траектории могут быть известны заранее из известной траектории уборочной машины, используемой с самонаводящимся управлением уборочной машины 10.
В еще одном варианте осуществления, точки будущего положения на траектории уборочной машины необходимо рассчитывать, потому что траектория уборочной машины не может быть с уверенностью известна. Точки будущего положения на траектории уборочной машины могут быть неизвестны, когда оператор выполняет ручное управление и маневрирование уборочной машины 10. В иллюстративном варианте осуществления, когда один главный зерноуборочный комбайн и один или более подчиненных зерноуборочных комбайнов работают в тандеме, главный зерноуборочный комбайн может управляться оператором вручную без определенной траектории, а каждый из подчиненных зерноуборочных комбайнов следуют один за другим за главным зерноуборочным комбайном посредством автоматического управления, используя самонаводящуюся систему, основанную на GPS, и используя соединения беспроводного сообщения между главным и подчиненными. Когда транспортное средство и подчиненный зерноуборочный комбайн выполняют операцию разгрузки на ходу, хотя подчиненный зерноуборочный комбайн управляется автоматически с помощью самонаводящейся системы, основанной на GPS, точки будущего положения на траектории для траектории подчиненного комбайна являются неизвестными и зависят от того, как оператор главного зерноуборочного комбайна будет вручную управлять уборочной машиной в процессе работы.
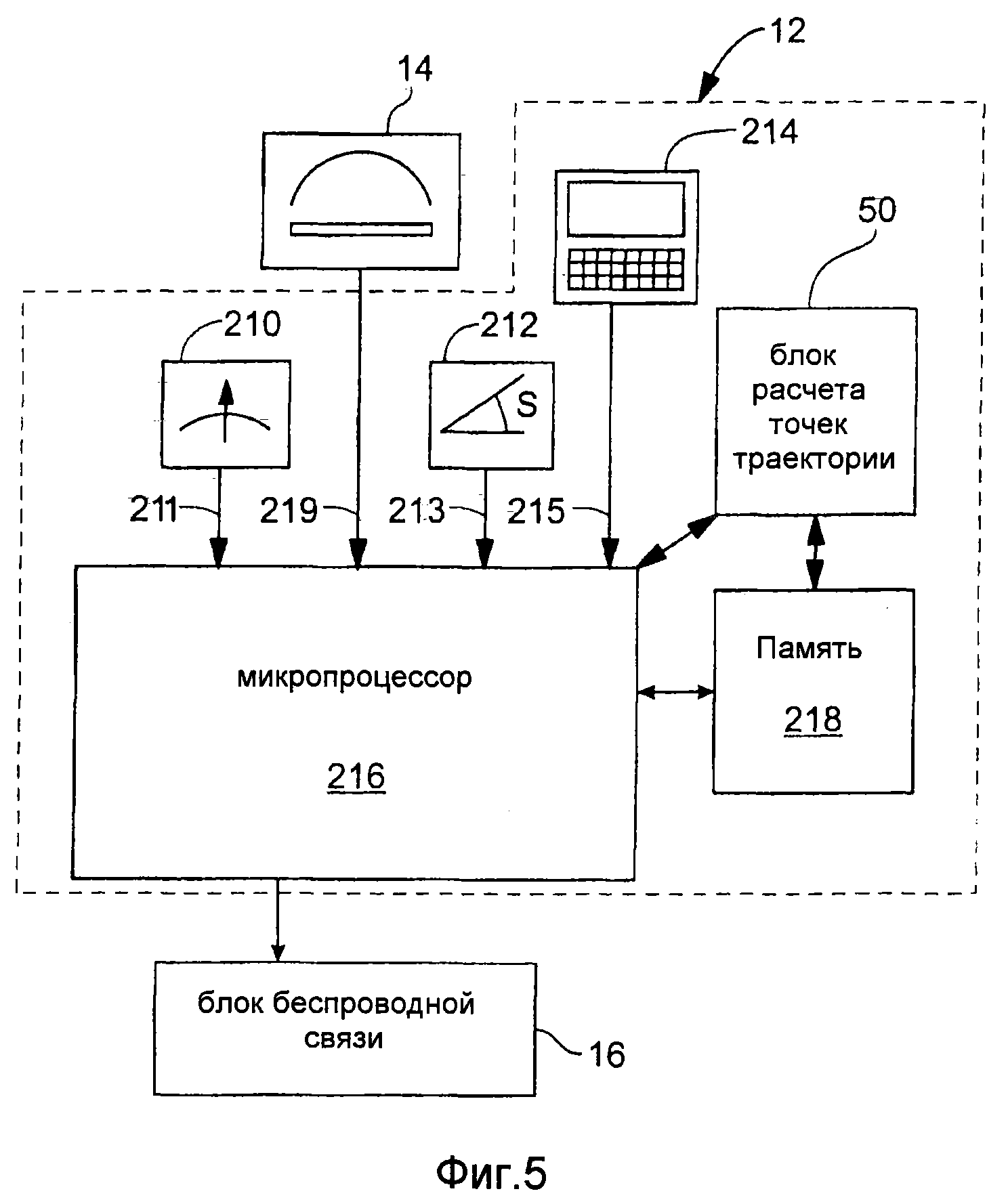
ФИГ.5 показывает вариант осуществления контроллера для уборочной машины. Контроллер 12 может быть расположен на уборочной машине 10 или в ней и может упрощать задачу управления уборочной машиной 10. Контроллер 12 может быть соединен с возможностью обмена информацией с GPS приемником 14 и блоком 16 беспроводной связи. Функции управления, алгоритмы управления или система управления, предоставляемые контроллером 12, могут обеспечиваться командами программного обеспечения, выполняемыми микропроцессором 216 или другими микропроцессорами, встроенными в контроллер 12.
Контроллер 12 может содержать датчик 210 скорости рыскания, датчик 212 угла поворота, устройство 214 ввода оператора, один или более микропроцессоров 216 и одну или более цифровых запоминающих схем или запоминающих устройств 218. Датчик 210 скорости рыскания, датчик 212 угла поворота, устройство ввода оператора или пользовательский интерфейс 214 и цифровое запоминающее устройство 218 соединены с возможностью обмена информацией с микропроцессором 216. Микропроцессор 216 соединен с возможностью обмена информацией с блоком 16 беспроводной связи.
Датчик 210 скорости рыскания предоставляет или посылает в микропроцессор 216 постоянный или цифровой сигнал 211 скорости рыскания, сообщая микропроцессору скорость, с которой уборочная машина 10 изменяет направление своего движения. Датчиком 210 скорости рыскания может быть гироскоп MEMS (микроэлектромеханической системы), лазерный гироскоп или другой гироскоп скорости. В качестве альтернативы, датчиком 210 скорости рыскания транспортного средства может быть микропроцессорная схема, запрограммированная рассчитывать скорость рыскания из входящих сигналов или определяемых или рассчитываемых значений.
Датчик 212 угла поворота посылает или предоставляет в микропроцессор 216 постоянный сигнал 213 угла поворота. Сигнал 213 угла поворота сообщает микропроцессору текущий угол управляемых колес уборочной машины 10. Датчиком 212 угла поворота может быть датчик положения, установленный на уборочной машине 10, или может быть микропроцессорная схема, запрограммированная рассчитывать угол поворота на основании входящих сигналов и значений, хранящихся в цифровом запоминающем устройстве 218. В качестве альтернативы, датчик угла поворота может содержать устройство на эффекте Холла, потенциометр, переменный резистор, линейный преобразователь положения или любой другой датчик в или на рулевом исполнительном механизме, колесе, ступице колеса или рулевом шарнире, который определяет поворот или относительное движение колеса или положение колеса относительно другой части транспортного средства, например, вращение колеса вокруг поворотного шкворня или в качестве альтернативы определяет смещение или движение рулевого исполнительного механизма или другого рычажного механизма, соединенного с ним.
Устройство ввода оператора или пользовательский интерфейс 214 может быть выполнен с возможностью получения информации, связанной с уборочной машиной 10, и с возможностью предоставления сигнала 215 с информацией в микропроцессор 216. Данные, вводимые оператором в устройство 214 ввода, могут сохраняться микропроцессором 216 в цифровом запоминающем устройстве 218. Устройство 214 ввода оператора может быть установлено внутри отделения оператора уборочной машины 10, чтобы оператор мог иметь к нему легкий доступ. Устройство 214 ввода оператора может содержать дисплей и клавиатуру. Микропроцессор 216 может получать переменные параметры с клавиатуры или от других датчиков, и может отображать текущее состояние уборочной машины (местоположение, направление и т.д.) на дисплее.
GPS приемник 14 постоянно получает информацию об абсолютном положении и скорости уборочной машины 10 и пересылает в микропроцессор 216 сигнал 219 положения и скорости транспортного средства, который указывает данное абсолютное положение и скорость. GPS приемник 14 может быть частью навигационной спутниковой системы, установленной снаружи уборочной машины 10 с четкой видимостью спутников. В качестве альтернативы, GPS приемник 14 может содержать антенну, установленную снаружи на уборочной машине 10, тогда как приемник установлен внутри уборочной машины 10. Решения, альтернативные GPS приемнику 14, могут включать дифференциальные глобальные системы позиционирования (DGPS), приемники наземного расположения или двухчастотные приемники с кинематикой в реальном времени (RTK). В одном варианте осуществления, для микропроцессора 216 может быть запрограммирован цифровой низкочастотный фильтр для того, чтобы обрабатывать принимаемый сигнал 219 скорости для уменьшения шума сигнала. Программа низкочастотного фильтра может храниться в цифровом запоминающем устройстве 218.
Цифровое запоминающее устройство 218 хранит команды и данные для микропроцессора. Команды конфигурируют микропроцессор 216 на выполнение различных функций. Запоминающее устройство также хранит технологические данные, рассчитываемые или определяемые микропроцессором 216 и/или вводимые оператором, использующим устройство 214 ввода оператора. В дополнение, контроллер может содержать блок 50 расчета точек траектории, который может рассчитывать или прогнозировать точки будущего положения на траектории для уборочной машины на основании рабочей информации уборочной машины. В одном варианте осуществления, блок 50 расчета точек траектории может содержать один или более микропроцессоров и запоминающих устройств для выполнения соответствующих компьютерных алгоритмов для расчета точек прогнозируемой будущей траектории. В еще одном варианте осуществления, блок 50 расчета точек траектории может использовать один или оба микропроцессора 216 или запоминающее устройство 218 для выполнения соответствующих компьютерных алгоритмов для расчета точек прогнозируемого будущего положения на траектории.
ФИГ.6 показывает систему прогнозирования точек будущего положения на траектории для уборочной машины. Система может содержать блок расчета точек траектории или блок 50 обработки, который может принимать входные сигналы от датчиков 45 и GPS приемника или блока 14 и предоставлять информацию, такую как точки прогнозируемого будущего положения на траектории, в WCU 16 для передачи в транспортное средство 20. В одном варианте осуществления, блок 50 расчета точек траектории может получать сигналы от датчиков уборочной машины, касающиеся чего-либо одного или всего из следующего: скорости вращения колес и направления движения; скорости рыскания; угла поворота; положения торможения; и положения дроссельной заслонки, и оценки точек будущего положения на траектории, используя принимаемые сигналы. Блок 50 расчета точек траектории использует модель, основанную на расчете/оценке точек на траектории для определения точек будущего положения на траектории уборочной машины, когда точки будущего положения на траектории совершенно не известны, например, когда уборочной машиной управляют вручную. В одном иллюстративном варианте осуществления, контроллер 22 транспортного средства 20 может оценивать точки будущего положения уборочной машины на траектории.
В еще одном иллюстративном варианте осуществления, блок 50 расчета точек траектории может рассчитывать прогнозируемую траекторию уборочной машины, такую как криволинейная траектория 400 уборочной машины на ФИГ.4, методом расчета кинематической модели точек траектории, используя сигналы положения и скорости уборочной машины от GPS устройства 14 уборочной машины и используя сигнал 211 скорости рыскания уборочной машины или сигнал угловой скорости поворота от датчика 210 скорости рыскания уборочной машины. Основным отношением для скорости, скорости рыскания и радиуса поворота уборочной машины 10, движущейся по криволинейной траектории, является: Скорость = радиус поворота × скорость рыскания. Кроме криволинейных траекторий, данное основное отношение также применимо к прямолинейным траекториям, таким как прямолинейная траектория 300 уборочной машины на ФИГ.3. Когда уборочная машина движется по прямолинейной траектории, ее скорость не является нулевой, но нулевой или приблизительно нулевой является измеренная скорость рыскания так, что радиус поворота из уравнения основного отношения приближается к бесконечности. Радиус поворота значения бесконечности представляет прямую линию. В еще одном иллюстративном варианте осуществления, прогнозируемой траекторией уборочной машины является прямолинейная траектория в направлении скорости уборочной машины, когда расчетный радиус поворота уборочной машины больше, чем предварительно заданное число, например, 3000 метров. В еще одном варианте осуществления, для повышения точности расчетного радиуса поворота может быть использована дополнительная информация по боковому скольжению уборочной машины.
Радиус поворота уборочной машины 10 может быть рассчитан с помощью измеренной скорости уборочной машины и скорости 308 рыскания с использованием уравнения выше. Прогнозируемая траектория уборочной машины на основании текущего GPS положения 304 уборочной машины может быть образована в виде дуги, как показано на ФИГ.4. Прогнозируемая дуговая траектория уборочной машины 10 может иметь радиус, равный расчетному радиусу поворота, может проходить через текущее положение GPS 304 уборочной машины и может располагаться по касательной к текущему направлению скорости уборочной машины. Направление скорости 308 рыскания может определять, поворачивается ли дуга уборочной машины 10 влево или поворачивается вправо. Например, положительная скорость рыскания отображает правый поворот уборочной машины, а отрицательная скорость рыскания отображает левый поворот уборочной машины.
Точки 306 прогнозируемого будущего положения на траектории уборочной машины 10 рассчитываются на основании прогнозируемой траектории уборочной машины, предварительно заданного интервала дистанций между двумя соседними точками траектории и предварительно заданного числа точек траектории для каждой прогнозируемой траектории. В одном варианте осуществления, предварительно заданный интервал дистанций может быть основан на скорости задействованной уборочной машины 10 или минимальном радиусе поворота уборочной машины 10. Точки 306 прогнозируемого будущего положения на траектории можно обновлять один раз каждый заданный временной интервал, когда уборочная машина 10 находится в движении. Когда уборочная машина 10 не находится в движении, точки 306 прогнозируемого будущего положения траектории последнего временного интервала остаются действительными, без обновления, при условии, что уборочная машина 10 не сдвинулась с прогнозируемой траектории.
ФИГ.7 показывает блок-схему иллюстративного варианта осуществления способа расчета кинематической модели точек траектории, выполняемого контроллером или блоком расчета точек траектории. В начале способа включается контроллер или блок, при этом статус точек траектории уборочной машины предварительно устанавливается недостоверным (стадия 602). Статус точек траектории уборочной машины может быть использован, чтобы обозначить, являются ли достоверными данные точек будущей траектории уборочной машины, хранящиеся в машинной памяти контроллера, для управления траекторией. Далее, проводят определение относительного того, движется ли уборочная машина или нет (стадия 604). Если уборочная машина не движется, способ ждет следующего временного интервала (стадия 618) перед повторным началом определения, движется ли уборочная машина. В одном варианте осуществления, заданным временным интервалом для способа расчета точек траектории может быть один раз в секунду. В еще одном варианте осуществления, частота обновления (или предварительно заданный временной интервал) точек прогнозируемой траектории уборочной машины может быть ограничена частотой обновления сигнала устройства GPS, т.е. насколько быстро доступны новые сигналы GPS. Одним примером частоты обновления выходного сигнала устройства GPS может быть новое значение сигнала, генерируемого каждые 200 миллисекунд. В дополнительном варианте осуществления, частота обновления точек прогнозируемой траектории уборочной машины может быть ограничена тем, насколько быстро самонаводящаяся система управления для транспортного средства, основанная на GPS, может принимать обновленные точки траектории для управления направлением движения. Например, самонаводящаяся система управления транспортным средством может обновлять точки траектории для управления направлением движения один раз за период времени, равный по меньшей мере одной секунде, что означает, что временной интервал для способа расчета точек траектории также должен составлять по меньшей мере одну секунду.
Следует избегать более длинных частот обновления точек прогнозируемой траектории уборочной машины. Чем длиннее период времени между двумя обновлениями, тем больше отклонение, или прогнозируемая погрешность, может быть между спрогнозированной последний раз траекторией уборочной машины и фактической траекторией уборочной машины, если угол поворота уборочной машины изменяется за счет ручного управления в течение периода времени между двумя обновлениями. В пределах каждого временного интервала для расчета точек будущей траектории, может быть множество временных интервалов для множества обновлений сигналов GPS и других датчиков, а также автоматических управляющих сигналов маневрирования транспортного средства для управления транспортным средством, чтобы следовать по рассчитанной траектории транспортного средства с нулевой погрешностью. В одном варианте осуществления, временной интервал для расчета точек будущей траектории может составлять одну секунду, временной интервал для сигнала устройства GPS может составлять 0,2 секунды, а временной интервал для сигнала датчика угла поворота и сигнала управления маневрированием может составлять 0,01 секунды.
Если установлено, что уборочная машина 10 движется, в контроллер предоставляется положение GPS для уборочной машины 10, скорость уборочной машины 10 и скорость рыскания уборочной машины 10 (стадия 606). Используя положение GPS, скорость и скорость рыскания, рассчитывается прогнозируемая траектория уборочной машины 10 (стадия 608). В иллюстративном варианте осуществления, для расчета прогнозируемой траектории уборочной машины могут быть использованы другие данные или входимая информация, например, пройденные точки траектории уборочной машины (прогнозируемые или фактические) и угол поворота уборочной машины. В одном варианте осуществления, история сигналов положения GPS уборочной машины обеспечивает информацию о фактических пройденных точках траектории уборочной машины. Затем контроллер может извлекать или получать информацию об интервале расстояний между точками траектории и количестве точек траектории, подлежащих использованию (стадия 610). Например, интервал дистанций, равный 4 метрам, с 6 точками траектории может обеспечивать прогнозируемый горизонт расстояния, равный 24 метрам, и прогнозируемый временной горизонт, равный 10,7 секундам при скорости движения, равной 5 м/час. Как интервал дистанций, так и число точек траектории могут храниться в памяти контроллера в виде предварительно заданных значений, подлежащих использованию с каждой прогнозируемой траекторией. В одном иллюстративном варианте осуществления, как интервал дистанций, так и число точек траектории могут иметь несколько предварительно заданных значений, которые могут быть выбраны на основании типа рассчитываемой прогнозируемой траектории. Например, первый набор предварительно заданных значений для интервала дистанций и числа точек траектории может быть выбран для прямолинейной прогнозируемой траектории, второй набор предварительно заданных значений для интервала дистанций и числа точек траектории может быть выбран для дугового типа прогнозируемой траектории, а третий набор предварительно заданных значений для интервала дистанций и числа точек траектории может быть выбран для спирального криволинейного типа прогнозируемой траектории. Когда используется прогнозируемая скорость изменения радиуса поворота уборочной машины или кривизна поворота, может быть рассчитан спиральный криволинейный тип прогнозируемой траектории. Прогнозируемая скорость изменения радиуса поворота уборочной машины может быть рассчитана из данных положения GPS уборочной машины и соотношения скорости уборочной машины и скорости рыскания в двух временных точках, текущего времени и времени незадолго перед этим. Прогнозируемая скорость изменения радиуса поворота уборочной машины также может быть рассчитана из данных положения GPS уборочной машины и угла поворота уборочной машины в двух временных точках, текущего времени и времени незадолго перед этим. Для перевода данных угла поворота уборочной машины в радиус поворота уборочной машины может быть использована предварительно заданная справочная таблица для соотношений между углом поворота уборочной машины и радиусом поворота уборочной машины. В еще одном варианте осуществления, как интервал дистанций, так и число точек траектории могут иметь несколько предварительно заданных значений, которые могут быть выбраны на основании скорости движения уборочной машины 10. Скорость работы уборочной машины может быть разделена на несколько диапазонов скоростей, например, низких, средних и высоких. Для каждого диапазона скоростей может быть выбран соответствующий набор предварительно заданных значений для интервала дистанций и числа точек траектории.
Как только интервал дистанций и число точек траектории получены контроллером или блоком расчета точек траектории, рассчитываются точки прогнозируемой траектории на прогнозируемой траектории уборочной машины (стадия 612), при этом статус точек на траектории уборочной машины обновляется на достоверный (стадия 614). Затем точки прогнозируемой траектории и статус точек на траектории уборочной машины отправляются или передаются блоком беспроводной связи в транспортное средство 20 (стадия 616). В одном иллюстративном варианте осуществления, информация о точках прогнозируемой траектории уборочной машины, посылаемая в транспортное средство 20, может содержать координаты GPS точек прогнозируемой будущей траектории, координаты GPS текущего положения уборочной машины, положения выгрузной трубы, тип прогнозируемой траектории уборочной машины (прямолинейная, дугообразная или спиральная) и скорость уборочной машины. Впоследствии, управление ждет следующего временного интервала (стадия 618) для повторения способа снова на основании предварительно заданного временного интервала для способа расчета точек траектории.
Для расчета траектории или пути для транспортного средства 20, которая сохраняет необходимую боковую, или параллельную, дистанцию между транспортным средством 20 и уборочной машиной 10, контроллер 22 для транспортного средства 20 в дополнение к информации от транспортного средства 20 о текущем положении и скорости для транспортного средства 20 может использовать информацию от уборочной машины 10 по типу прогнозируемой траектории, положению выгрузной трубы для уборочной машины 10, текущему положению и скорости уборочной машины 10 и точкам прогнозируемой будущей траектории. В одном варианте осуществления, транспортное средство 20 может иметь траекторию или путь, основанный на прогнозируемой траектории и точках прогнозируемой будущей траектории для уборочной машины 10 плюс необходимая боковая дистанция. Необходимая боковая дистанция может быть основана главным образом на составляющей дистанции бокового смещения положения выгрузной трубы относительно положения GPS уборочной машины. Траектория транспортного средства может быть рассчитана, чтобы она была параллельной траектории уборочной машины с необходимой боковой дистанцией и чтобы она была того же самого типа, что и траектория уборочной машины, причем данная траектория уборочной машины предоставляется за счет информации по точкам траектории и типу прогнозируемой траектории уборочной машины 10. Затем можно рассчитать точки траектории для транспортного средства 20 на основании рассчитанной траектории транспортного средства и соответствующей дистанции интервала и числа точек траектории для точек будущей траектории для уборочной машины 10. Информация о текущем положении и скорости для транспортного средства 20 может быть использована для расчета переходной траектории для плавного направления транспортного средства 20 из текущего положения к расчетной траектории. В процессе операций разгрузки на ходу, самонаводящаяся система управления, основанная на GPS, для транспортного средства 20 может управлять автоматическим маневрированием транспортного средства 20, чтобы следовать по рассчитанной траектории транспортного средства для сохранения необходимой боковой дистанции от уборочной машины 10, используя информацию о типе траектории транспортного средства и точках траектории, а система управления продольным положением для транспортного средства 20 может управлять скоростью транспортного средства 20 для сохранения необходимой продольной дистанции от уборочной машины 10, используя информацию о положении и скорости уборочной машины 10 и положении и скорости транспортного средства 20 с необходимой продольной дистанцией в качестве контрольной цели. В еще одном варианте осуществления, блок 50 расчета точек траектории в контроллере 12 уборочной машины 10 может рассчитывать прогнозируемую траекторию и точки траектории для уборочной машины 10 и траекторию и точки траектории для транспортного средства 20 и посылать рассчитанную информацию о точках траектории транспортного средства в транспортное средство 20.
В иллюстративном варианте осуществления, беспроводной связью между уборочной машиной 10 и транспортным средством 20 могут быть сообщения локальной сети контроллеров (CAN).
В иллюстративном варианте осуществления, уборочная машина 10 может работать в качестве «главного» транспортного средства, а транспортное средство 20 может быть «подчиненным» транспортным средством, управление которого зависит от «главного» транспортного средства. Однако в еще одном варианте осуществления, транспортное средство 20 может работать в качестве «главного» транспортного средства, а уборочная машина 10 может быть «подчиненным» транспортным средством.
В иллюстративном варианте осуществления, операция разгрузки на ходу и операция управления траекторией приостанавливаются в безопасном режиме, когда беспроводная связь не работает, или когда сигнал GPS ненадежный. В безопасном режиме операция разгрузки на ходу останавливается, а трактор или транспортное средство замедляется.
Должно быть понятно, что применение не ограничено деталями или методологией, изложенными в следующем описании или проиллюстрированными на чертежах. Также должно быть понятно, что фразеология и терминология, используемые в данном документе, предназначены только для цели описания и не должны рассматриваться в качестве ограничения.
Представленная заявка рассматривает способы, системы и программные продукты на любом машиночитаемом носителе для выполнения ее операций. Варианты осуществления представленной заявки могут быть реализованы с использованием существующих компьютерных процессоров или с помощью компьютерного процессора специального назначения для подходящей системы, или с помощью системы аппаратного обеспечения.
Варианты осуществления в пределах объема правовых притязаний представленной заявки включают программные продукты, содержащие машиночитаемый носитель, несущий или имеющий выполняемые машиной команды или хранящиеся на нем структуры данных. Машиночитаемым носителем может быть любой имеющийся в наличии нетранзиторный носитель, к которому может иметь доступ компьютер общего назначения или специального назначения или другая машина с процессором. В качестве примера, машиночитаемый носитель может содержать оперативное запоминающее устройство, постоянное запоминающее устройство, стираемое перепрограммируемое постоянное запоминающее устройство, программируемое запоминающее устройство с электронным стиранием, компакт-диск без возможности перезаписи или другой накопитель на оптических дисках, накопитель на магнитных дисках или другие магнитные запоминающие устройства или любой другой носитель, который может быть использован для переноса или хранения требуемой управляющей программы в виде выполняемых машиной команд или структур данных и к которому может иметь доступ компьютер общего назначения или специального назначения или другая машина с процессором. Когда информация передается или предоставляется в машину по сети или по другим соединениям связи (либо постоянным кабельным, либо беспроводным, либо по комбинации постоянного кабельного или беспроводного), машина правильно видит соединение в виде машиночитаемого носителя. В рамки машиночитаемого носителя также включены комбинации приведенного выше. Выполняемые машиной команды включают в себя, например, команды и данные, которые заставляют компьютер общего назначения, компьютер специального назначения или обрабатывающие машины специального назначения выполнять определенную функцию или группу функций.
Хотя чертежи в данном документе могут демонстрировать конкретный порядок стадий способа, порядок стадий может отличаться от изображенного порядка. Также, две или более стадии могут выполняться одновременно или с частичным совпадением. Варианты выполнения стадий могут зависеть от выбираемых систем программного обеспечения и аппаратного обеспечения и от выбора конструктора. Все подобные варианты находятся в пределах объема правовых притязаний заявки. Аналогичным образом, варианты осуществления программного обеспечения могут быть реализованы с помощью стандартных методик программирования с основанной на правилах логикой и другой логикой для осуществления различных стадий соединения, стадий обработки, стадий сравнения и стадий принятия решений.
При дальнейшем рассмотрении чертежей данной заявки и обсуждении подобных чертежей и показанных на них элементов, необходимо понимать и принимать во внимание, что с целью ясности на чертежах множества в целом одинаковых элементов, расположенных рядом друг с другом или тянущихся вдоль некоторого расстояния, иногда или даже часто, могут изображаться в виде одного или более типичных элементов с удлиненными пунктирными линиями, указывающими на общее протяжение подобных одинаковых элементов. В подобных случаях, различные элементы, представляемые таким образом, могут в большинстве случаев рассматриваться, как в целом одинаковый типичный элемент, изображенный и действующий в большинстве случаев таким же образом и с той же целью, как изображенный типичный элемент.
Множество способов и составных элементов крепления или соединения, используемых в заявке, являются широко известными и используемыми, и их точная природа или тип не являются необходимыми для понимания заявки квалифицированным специалистом в данной области. Также, всякая ссылка в данном документе на термины «левый» или «правый» используется всего лишь в качестве удобства и определяется расположением в задней части машины, обращенной к своему нормальному направлению движения. Кроме того, различные составные элементы, показанные или описанные в данном документе для любого конкретного варианта осуществления в заявке, можно изменять и заменять, как это предусматривается заявкой, при этом практическое применение конкретного варианта осуществления какого-либо элемента может уже быть широко известно или использоваться квалифицированными специалистами в данной области.
Должно быть понятно, что в пределах принципов и объема правовых притязаний заявки будет встречаться изменение деталей, материалов, стадий и конфигураций частей, которые были описаны и проиллюстрированы для объяснения сути заявки, и которое может быть осуществлено квалифицированными специалистами в данной области при чтении данного раскрытия. Вышеизложенное описание иллюстрирует пример варианта осуществления изобретения; однако, концепции, которые основаны на описании, могут использоваться в других вариантах осуществления без выхода за пределы объема правовых притязаний заявки.
Несмотря на то, что изобретение было описано со ссылкой на иллюстративный вариант осуществления, квалифицированным специалистам в данной области должно быть понятно, что для его элементов могут быть сделаны различные изменения и могут быть заменены эквиваленты без выхода из объема изобретения. В дополнение, может быть сделано множество модификаций для приспособления конкретной ситуации или материала к идеям заявки без выхода по существу из объема ее правовых притязаний. Вследствие этого, предусматривается, что изобретение не должно быть ограничено конкретным вариантом осуществления, раскрытым в качестве наилучшего варианта, предусмотренного для осуществления данного изобретения, но что изобретение будет включать в себя все варианты осуществления, попадающие в рамки приложенной формулы изобретения.
Реферат
Группа изобретений относится к сельскому хозяйству и может быть использована при управлении траекторией транспортного средства относительно уборочной машины при ее разгрузке на ходу в процессе уборки. Уборочная машина посылает в транспортное средство информацию о своем текущем положении и точках будущего положения на траектории. Система управления использует полученную от уборочной машины информацию для определения траектории транспортного средства. Группа изобретений позволяет эффективно разгружать уборочную машину на ходу в процессе уборки в транспортное средство без потери выгружаемого материала на землю. 8 н. и 13 з.п. ф-лы, 7 ил.
Формула
приведение в движение уборочной машины вдоль неизвестной траектории движения;
определение положения и скорости для уборочной машины;
определение положения и скорости для транспортного средства;
определение положения выгрузной трубы для уборочной машины;
расчет точек будущей траектории для уборочной машины, используя определяемые положение и скорость уборочной машины;
расчет траектории для транспортного средства, используя рассчитанные точки будущей траектории, определяемое положение выгрузной трубы, определяемые положение и скорость транспортного средства и определяемые положение и скорость уборочной машины; и
управление транспортным средством таким образом, чтобы следовать рассчитанной траектории с помощью команд контроллера.
измерение скорости рыскания для уборочной машины;
расчет прогнозируемой траектории для уборочной машины, используя измеренную скорость рыскания и установленные положение и скорость для уборочной машины;
получение заданного интервала дистанций и заданного числа точек траектории; и
расчет точек будущей траектории, используя рассчитанную прогнозируемую траекторию, заданный интервал дистанций и заданное число точек траектории.
создание дуги, проходящей через текущее положение для уборочной машины и расположенной по касательной к текущему направлению скорости для уборочной машины, при этом генерируемая дуга имеет радиус, соответствующий расчетному радиусу поворота уборочной машины, и направление поворота, образованное направлением измеренной скорости рыскания; и
создание прямолинейной траектории, проходящей через текущее положение для уборочной машины и в направлении скорости уборочной машины на основании расчетного радиуса поворота уборочной машины, превышающего заданное значение.
первое устройство глобальной системы позиционирования для определения положения и скорости уборочной машины;
второе устройство глобальной системы позиционирования для определения положения и скорости транспортного средства;
настраиваемый параметр, соответствующий пространственной конфигурации выгрузной трубы и используемый для определения положения выгрузной трубы уборочной машины;
первый контроллер, содержащий микропроцессор для выполнения первой компьютерной программы для расчета множества точек прогнозируемой будущей траектории для уборочной машины, используя положение и скорость уборочной машины от первого устройства глобальной системы позиционирования и скорость рыскания уборочной машины; и
второй контроллер, содержащий микропроцессор для выполнения второй компьютерной программы для расчета траектории транспортного средства, используя положение и скорость уборочной машины от первого устройства глобальной системы позиционирования, положение и скорость транспортного средства от второго устройства глобальной системы позиционирования, установленное положение выгрузной трубы и множество точек прогнозируемой будущей траектории от первого контроллера.
первое беспроводное устройство связи, установленное на уборочной машине; и
второе беспроводное устройство связи, установленное на транспортном средстве, при этом второе беспроводное устройство связи находится во взаимодействии с первым беспроводным устройством связи.
получение положения от глобальной системы позиционирования, скорости от глобальной системы позиционирования и скорости рыскания для уборочной машины;
расчет прогнозируемой траектории для уборочной машины, используя полученное положение от глобальной системы позиционирования, скорость от глобальной системы позиционирования и скорость рыскания;
получение заданного интервала дистанций и заданного числа точек траектории; и
расчет точек прогнозируемой будущей траектории для уборочной машины, используя рассчитанную прогнозируемую траекторию, заданный интервал дистанций и заданное число точек траектории.
определение того, движется ли уборочная машина; и
в ответ на определение, что уборочная машина движется, выполнение получения от глобальной системы позиционирования положения, скорости и скорости рыскания, расчета прогнозируемой траектории для уборочной машины, получения заданного интервала дистанций и заданного числа точек траектории и расчета точек прогнозируемой будущей траектории.
устройство глобальной системы позиционирования для определения положения и скорости уборочной машины;
множество датчиков, предназначенных для измерения рабочих параметров уборочной машины;
блок расчета точек траектории, находящийся во взаимодействии с устройством глобальной системы позиционирования для получения установленных положения и скорости уборочной машины и находящийся во взаимодействии с множеством датчиков для получения измеренных рабочих параметров уборочной машины;
при этом блок расчета точек траектории выполнен с возможностью генерирования множества точек прогнозируемого будущего положения на траектории для уборочной машины, используя установленное положение и скорость уборочной машины и измеренные рабочие параметры уборочной машины;
причем система дополнительно содержит блок беспроводной связи, находящийся во взаимодействии с блоком расчета точек траектории и выполненный с возможностью получения созданного множества точек прогнозируемого будущего положения на траектории и обеспечения созданного множества точек прогнозируемого будущего положения на траектории в транспортное средство во время скоординированной работы с уборочной машиной.
устройство глобальной системы позиционирования для определения положения и скорости уборочной машины;
множество датчиков, предназначенных для измерения рабочих параметров уборочной машины;
блок расчета точек траектории, находящийся во взаимодействии с устройством глобальной системы позиционирования для получения установленных положения и скорости уборочной машины и находящийся во взаимодействии с множеством датчиков для получения измеренных рабочих параметров уборочной машины;
при этом блок расчета точек траектории выполнен с возможностью генерирования множества точек прогнозируемого будущего положения на траектории для уборочной машины, используя установленное положение и скорость уборочной машины и измеренные рабочие параметры уборочной машины;
причем измеренные рабочие параметры уборочной машины включают по меньшей мере одно из скорости вращения колес, направления движения, угла поворота, скорости рыскания, положения торможения или положения дроссельной заслонки.
устройство глобальной системы позиционирования для определения положения и скорости уборочной машины;
множество датчиков, предназначенных для измерения рабочих параметров уборочной машины;
блок расчета точек траектории, находящийся во взаимодействии с устройством глобальной системы позиционирования для получения установленных положения и скорости уборочной машины и находящийся во взаимодействии с множеством датчиков для получения измеренных рабочих параметров уборочной машины;
при этом блок расчета точек траектории выполнен с возможностью генерирования множества точек прогнозируемого будущего положения на траектории для уборочной машины, используя установленное положение и скорость уборочной машины и измеренные рабочие параметры уборочной машины;
причем блок расчета точек траектории содержит микропроцессор для выполнения компьютерного алгоритма со способом расчета кинематической модели точек траектории для генерирования множества точек прогнозируемого будущего положения на траектории.
приведение в движение уборочной машины вдоль неизвестной траектории движения;
определение положения и скорости для уборочной машины; определение положения и скорости для транспортного средства;
определение положения выгрузной трубы для уборочной машины;
расчет точек будущей траектории для уборочной машины, используя определяемые положение и скорость уборочной машины;
расчет траектории для транспортного средства, используя рассчитанные точки будущей траектории, определяемое положение выгрузной трубы, определяемые положение и скорость транспортного средства и определяемые положение и скорость уборочной машины; и
управление транспортным средством таким образом, чтобы следовать рассчитанной траектории с помощью команд контроллера;
при этом расчет точек будущей траектории включает:
- измерение скорости рыскания для уборочной машины;
- расчет прогнозируемой траектории для уборочной машины, используя измеренную скорость рыскания и установленные положение и скорость для уборочной машины;
- получение заданного интервала дистанций и заданного числа точек траектории; и
- расчет точек будущей траектории, используя рассчитанную прогнозируемую траекторию, заданный интервал дистанций и заданное число точек траектории.
приведение в движение уборочной машины вдоль неизвестной траектории движения;
определение положения и скорости для уборочной машины;
определение положения и скорости для транспортного средства;
определение положения выгрузной трубы для уборочной машины;
расчет точек будущей траектории для уборочной машины, используя определяемые положение и скорость уборочной машины;
расчет траектории для транспортного средства, используя рассчитанные точки будущей траектории, определяемое положение выгрузной трубы, определяемые положение и скорость транспортного средства и определяемые положение и скорость уборочной машины; и
управление транспортным средством таким образом, чтобы следовать рассчитанной траектории с помощью команд контроллера;
при этом расчет точек будущей траектории включает:
- измерение скорости рыскания для уборочной машины;
- расчет прогнозируемой траектории для уборочной машины, используя измеренную скорость рыскания и установленные положение и скорость для уборочной машины;
- получение заданного интервала дистанций и заданного числа точек траектории; и
- расчет точек будущей траектории, используя рассчитанную прогнозируемую траекторию, заданный интервал дистанций и заданное число точек траектории; а
расчет прогнозируемой траектории включает:
- создание дуги, проходящей через текущее положение для уборочной машины и расположенной по касательной к текущему направлению скорости для уборочной машины, при этом генерируемая дуга имеет радиус, соответствующий расчетному радиусу поворота уборочной машины, и направление поворота, образованное направлением измеренной скорости рыскания; и
- создание прямолинейной траектории, проходящей через текущее положение для уборочной машины и в направлении скорости уборочной машины на основании расчетного радиуса поворота уборочной машины, превышающего заданное значение.
Комментарии