Способ разработки задающих линий движения для рабочих сельхозмашин - RU2412580C2
Код документа: RU2412580C2
Чертежи
Описание
Область техники
Настоящее изобретение относится к системе маршрутизации для сельскохозяйственных машин в соответствии с ограничительной частью пункта 1 формулы изобретения.
Уровень техники
Из уровня техники известно множество систем маршрутизации, в которых помимо разработки маршрутов движения транспортного средства, движущегося по подлежащей обработке территории, предусмотрена также автоматическая обработка предварительно запрограммированных маршрутов в указанном транспортном средстве. Так, например, в патенте ФРГ №4342171 описано, как в процессе обработки почвы производится запись участков пути, пройденных на обрабатываемой территории почвообрабатывающей машиной, с привлечением данных положения системы GPS (Global Positioning System - глобальная система навигации и определения местоположения). Определенные таким образом данные участков пути рабочей сельхозмашины далее, в зависимости от исполнения устройства обработки данных на этой сельхозмашине или в центральном вычислительном устройстве, преобразуются в данные маршрутов, которые могут либо указываться в режиме реального времени, либо записываться в память с возможностью вызова. Основной недостаток таких систем заключается в том, что транспортное средство вначале должно выполнить обработку с движением по определенному маршруту перед тем, как этот маршрут становится доступным для вызова в запоминающем устройстве и может быть при необходимости использован в качестве базового набора данных для генерирования будущих маршрутов движения машины при обработке.
Типовой современный способ маршрутизации во взаимодействии с так называемой системой автоматического вождения по заданной линии раскрыт, в частности, в патентном документе США №6236924. Согласно этому способу при поддержке программного обеспечения вначале выбирают подлежащую обработке территорию с помощью маркировочных задающих точек, а затем эту выбранную территорию разделяют на определенные маршруты движения по различным критериям оптимизации. За счет этого транспортному средству может быть передан предварительно определенный план маршрутизации, и после этого транспортное средство автоматически ведется по подлежащей обработке территории. Системы этого типа также имеют недостаток в том, что вначале для выбираемой территории необходимо определить маркировочные задающие точки, а для этого нужно либо привлекать ранее установленные данные, либо произвести периферийный объезд транспортным средством территории, подлежащей выбору. Что касается привлечения ранее установленных данных, возможности ограничены имеющимся объемом информации, а непосредственный объезд подлежащей обработке территории транспортным средством связан со значительными подготовительными затратами на разработку плана маршрутов.
Раскрытие изобретения
Соответственно, задача, на решение которой направлено настоящее изобретение, заключается в устранении недостатков известных решений уровня техники и создании системы маршрутизации, способной быстро и с высокой точностью намечать маршруты для подлежащей обработке территории со значительным снижением затрат на разработку маршрутов.
В соответствии с изобретением решение поставленной задачи достигается за счет признаков, изложенных в пункте 1 формулы изобретения.
За счет того что в системе маршрутизации имеется навигационный модуль, который содержит один или несколько режимов автоматического движения и, по меньшей мере, один режим записи, при этом режим или режимы автоматического движения и, по меньшей мере, один режим записи могут быть активизированы независимо друг от друга, обеспечивается возможность при эксплуатации рабочей сельхозмашины в режиме автоматического движения одновременной записи задающей линии для режима автоматического движения при будущей обработке. Таким образом, производится обработка с движением по уже существующему маршруту и одновременно разрабатывается новый маршрут, который понадобится в будущем, что значительно снижает затраты на разработку маршрутов системы маршрутизации.
В предпочтительном примере осуществления изобретения в одном режиме автоматического движения производится запись определенного участка пути, который одновременно образует задающую линию для одного или нескольких последующих участков пути, подлежащих последующей обработке. Решение имеет особенное преимущество в том, что маршрутизация производится на основе очень точных данных территории, подлежащей обработке, а генерирование этих точных данных в так называемом режиме реального времени не требует непродуктивных вспомогательных проходов для определения необходимых задающих точек подлежащей обработке территории.
В дальнейшем предпочтительном примере осуществления определяемые задающей линией участки пути, подлежащие последующей обработке, в модуле функции рядов сводятся воедино в качестве функции рядов. За счет этого разделение территории последующей обработки или участков этой территории определенными маршрутами может быть полностью закончено до того, как будет закончена текущая обработка территории, обрабатываемой транспортным средством.
В предпочтительном примере развития изобретения определение участков пути производится путем выбора начальной точки и конечной точки, ограничивающих определяемый участок пути. Благодаря этому оператор транспортного средства может без особых усилий определять конфигурацию новой задающей линии. В очень простом примере выполнения осуществления это достигается таким путем, что начальную точку и конечную точку выбирают посредством генерирования сигналов включения и выключения в устройстве управления и обработки данных. Еще проще это производится в том случае, если в предпочтительном примере осуществления устройство управления и обработки данных содержит блок индикации, выполненный в виде сенсорного монитора, а начальную точку и конечную точку определяют посредством выбора на сенсорном мониторе. При этом оператор совершенно свободен при выборе подходящей задающей линии, поскольку на экране в качестве новой задающей линии может быть определен любой участок пути.
В предпочтительном примере осуществления изобретения функция рядов включает в себя разделение подлежащей обработке территории на множество участков пути, так что в ходе единственного шага на участки пути может быть разделена подлежащая обработке территория любой величины.
Особенно гибкое использование системы маршрутизации по изобретению достигается в том случае, когда режимы автоматического движения содержат движение по прямолинейному участку, ограниченному начальной точкой и конечной точкой, движение по контурному участку, ограниченному начальной точкой и конечной точкой, и движение по контуру без ограничения начальной точкой и конечной точкой или комбинацию, по меньшей мере, из двух этих режимов автоматического движения. Эта гибкость использования системы маршрутизации дополнительно повышается также, если соответствующий режим автоматического движения может быть выбран свободно, при этом предусмотрена возможность переключения между этими режимами автоматического движения.
В дальнейшем предпочтительном примере осуществления в одном режиме автоматического движения производится запись определенного участка пути, и этот определенный участок пути образует задающую линию для функции рядов другого режима автоматического движения. Особенное преимущество решения состоит в том, что в этом любом режиме автоматического движения может генерироваться задающая линия любой структуры, что дает возможность гибкого использования методов генерирования задающей линии.
Дальнейшие предпочтительные примеры осуществления являются предметом защиты в зависимых пунктах.
Краткий перечень чертежей
Далее со ссылками на прилагаемые чертежи будет подробно описан пример осуществления изобретения. На чертежах:
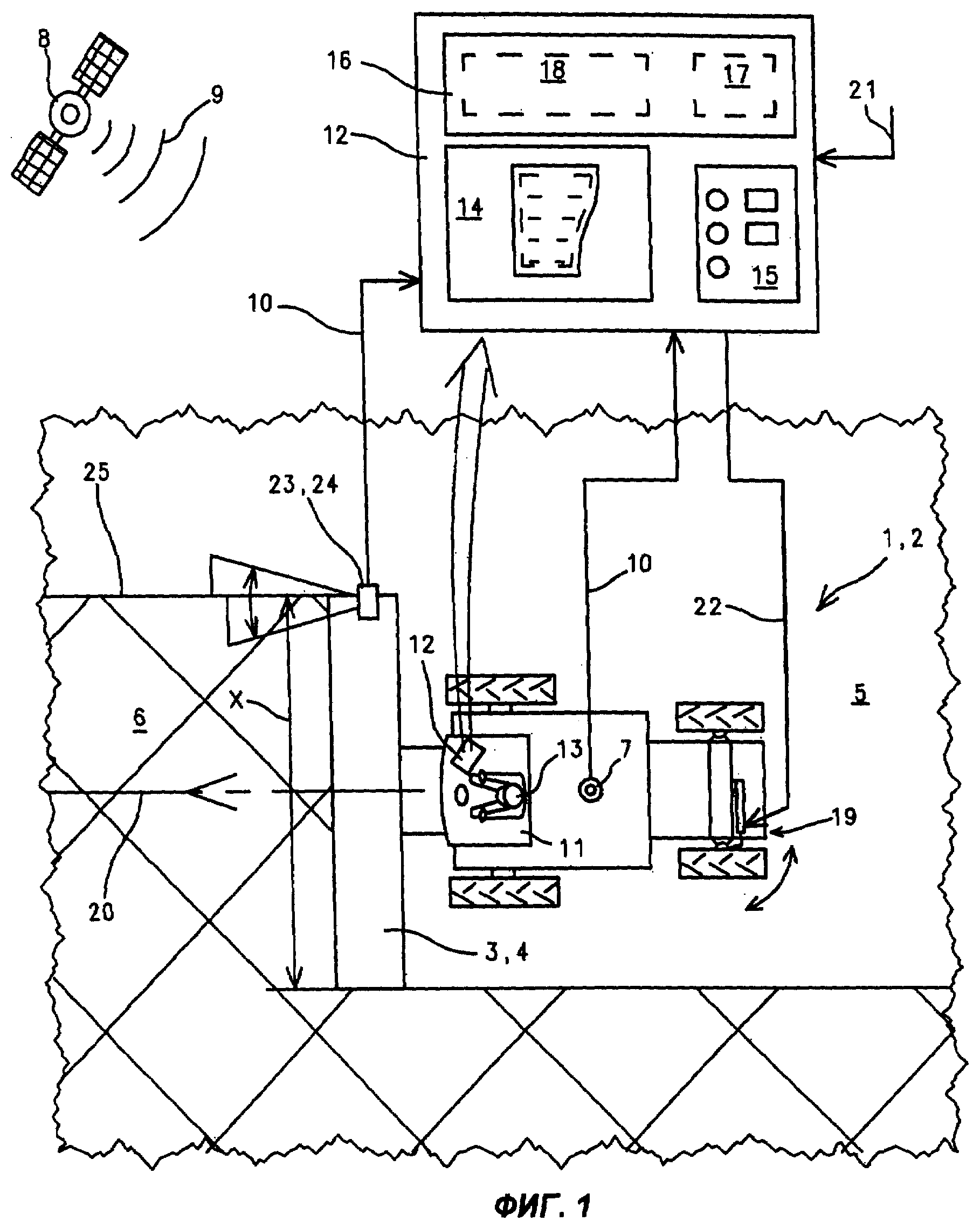
фиг.1 изображает на виде сверху рабочую сельхозмашину, при этом подробно показано устройство управления и обработки данных по изобретению,
фиг.2 схематично изображает систему маршрутизации по изобретению,
фиг.3 схематично изображает устройство управления и обработки данных с программирующим модулем по изобретению.
Осуществление изобретения
На фиг.1 представлена рабочая сельхозмашина 1, выполненная в виде зерноуборочного комбайна 2. Комбайн 2 снабжен спереди навесным аппаратом 4, выполненным в виде жатвенного аппарата 3 для уборки возделанной культуры 6 на подлежащей обработке территории 5. Комбайн 2 оснащен известным устройством 7 определения положения на основе GPS. Это устройство 7 получает сигналы 9 положения, генерируемые так называемыми спутниками 8 системы GPS, и по этим сигналам генерирует сигналы 10 положения комбайна 2. Кроме того, в кабине 11 водителя комбайна 2 в зоне доступа оператора 13 машины расположено, по меньшей мере, одно устройство 12 управления и обработки данных. Как схематично показано в увеличенном виде на фиг.1, оно содержит, по меньшей мере, блок 14 индикации, блок 15 ввода и программирующий модуль 16. В программирующем модуле 16 заложены система 17 маршрутизации и навигационный модуль 18, которые будут описаны более подробно далее.
Кроме того, комбайн 2 оснащен системой 19 рулевого управления, которая может управляться автоматически, так что комбайн 2 может двигаться по подлежащей обработке территории 5 с автоматическим направлением по предварительно определенным маршрутам 20. В простейшем случае это автоматическое вождение рабочей сельхозмашины может осуществляться за счет того, что в устройстве 12 управления и обработки данных заложены подлежащие обработке маршруты 20, причем их генерирование производится либо внешними средствами, либо в самом устройстве 12 управления и обработки данных. При внешнем генерировании внешние сигналы 21 маршрутов обычно передаются в устройство 12 управления и обработки данных способом дистанционной передачи данных. С учетом сигналов 10 положения комбайна 2, генерируемых и передаваемых от устройства 7 определения положения на основе GPS, в устройстве 12 управления и обработки данных генерируются так называемые сигналы 22 рулевого управления, передаваемые на систему 19 рулевого управления, так что рабочая сельхозмашина 1 может автоматически направляться по определенному маршруту 20 на территории 5, подлежащей обработке. В рамках изобретения возможен вариант осуществления, при котором сигналы 10 положения рабочей сельхозмашины 1 на подлежащей обработке территории 5 могут генерироваться оптоэлектронными устройствами 23, такими как лазерный сканер 24, определяющий кромку 25 обработки культуры.
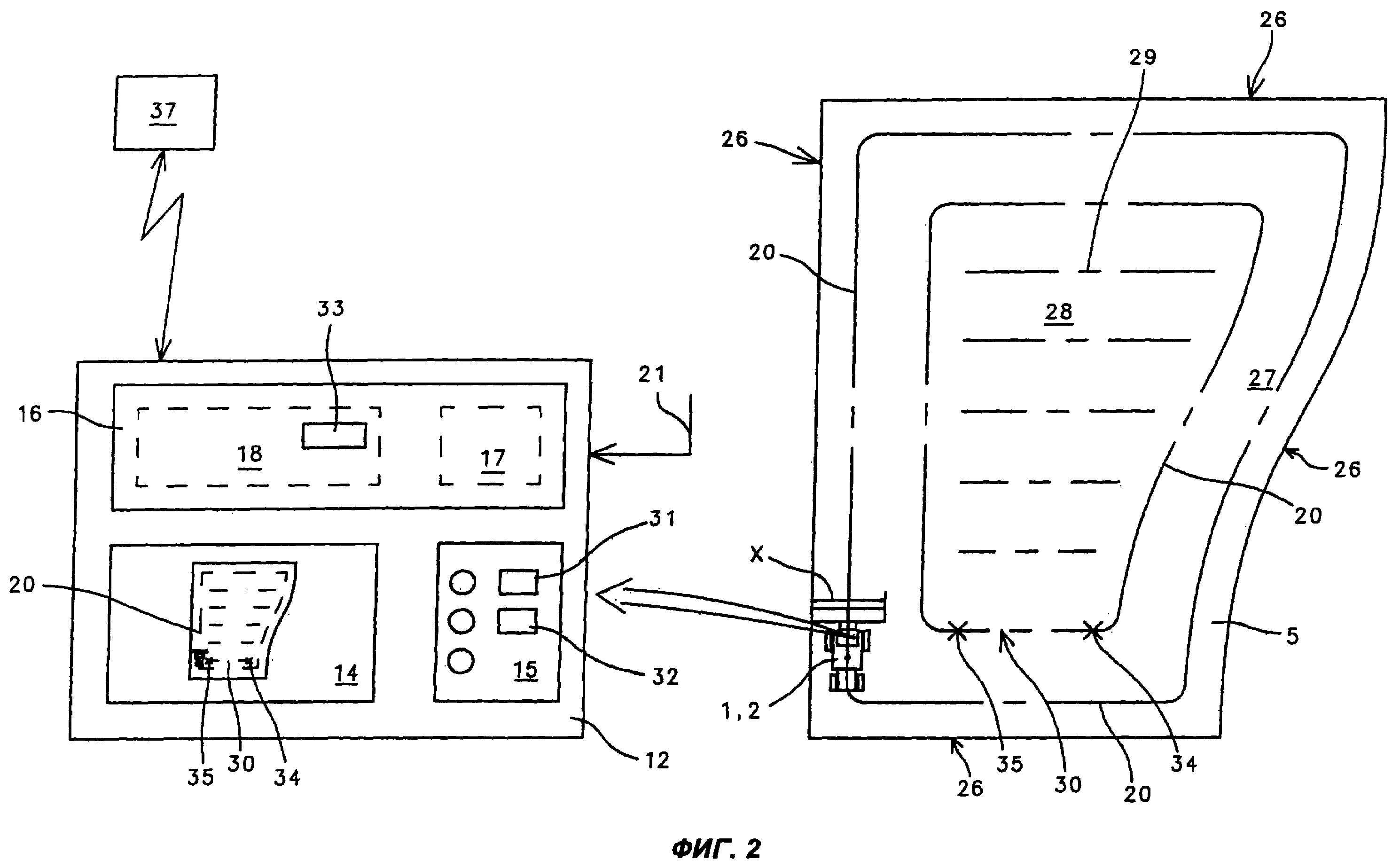
Как показано на фиг.2, подлежащая обработке территория 5 может иметь любые внешние контуры 26. При этом маршруты 20 движения рабочей сельхозмашины 1 в зависимости от рабочей ширины Х захвата машины должны выбираться таким образом, чтобы соседние маршруты 20 проходили на расстоянии друг от друга, примерно равном этой рабочей ширине Х захвата. Самый крайний наружный маршрут 20, показанный штрихпунктирными линиями, либо должен быть определен как начальный однократный объезд подлежащей обработке территории 5, либо может задаваться по внешним сигналам 21 маршрутов, которые непосредственно передаются на устройство 12 управления и обработки данных комбайна 2 в том случае, если раньше этот объезд уже был выполнен и соответствующий маршрут разработан. В зависимости от характеристики подлежащей обработке территории 5 и размера рабочей сельхозмашины 1 может оказаться необходимой обработка рабочей сельхозмашиной 1 нескольких маршрутов 20 движения, копирующих наружный контур территории 5. В этом случае, по меньшей мере, внутренние маршруты 20 могут обрабатываться автоматически.
В соответствии с фиг.2 в зависимости от внешнего контура 26 подлежащей обработке территории 5 маршруты движения могут иметь самые различные геометрические формы и могут быть расположены самым различным образом. Именно здесь и вступает в действие изобретение. Оптимальная схема участков пути движения на подлежащей обработке территории 5 может быть структурирована, например, таким образом, что после прохода одного или нескольких маршрутов 20, копирующих внешний контур 26 территории 5, остаточная территория 28 может более эффективно объезжаться или обрабатываться участками 29 пути движения, проходящими другим образом. Для генерирования этих маршрутов 29 необходима вначале так называемая задающая линия 30, которая определяет ориентацию вновь генерируемых маршрутов 29 на территории 5. В соответствии со способом по изобретению эта задающая линия 30 генерируется путем того, что, в то время как рабочая сельхозмашина 1 автоматически направляется вдоль наружного маршрута 20, копирующего внешний контур 26 территории 5, оператор машины 1 посредством воздействия на клавишу 31 включения и клавишу 32 выключения может активизировать и вновь останавливать режим 33 записи в навигационном модуле 18. Во время активизации режима 33 записи контур маршрута 20, проходимого машиной 1 за этот промежуток времени, записывается как новая задающая линия 30 и закладывается в программирующий модуль 16. Воздействие на клавишу 31 включения и клавишу 32 выключения одновременно приводит к генерированию так называемых начальных точек 34 и конечных точек 35. Эти точки, по меньшей мере, записываются в память, а в предпочтительном примере осуществления изобретения также указываются блоком 14 индикации. В этом отношении возможен вариант выполнения, при котором блок 14 индикации содержит так называемый сенсорный монитор 36, на котором оператор 13 может выбрать начальную точку 34 и конечную точку 35 непосредственно на представленном маршруте 20 без необходимости активизации клавиш 31, 32. В рамках изобретения возможна также передача записанной в памяти задающей линии 30 в центральное вычислительное устройство 37. Преимущество решения заключается в том, что генерирование новых маршрутов 29, копирующих генерированную задающую линию 30, может производиться в центральном вычислительном устройстве 37. За счет этого устраняется необходимость установки на рабочей сельхозмашине 1 требуемых вычислительных мощностей, и расположенное на комбайне 2 устройство 12 управления и обработки данных может быть более дешевым.
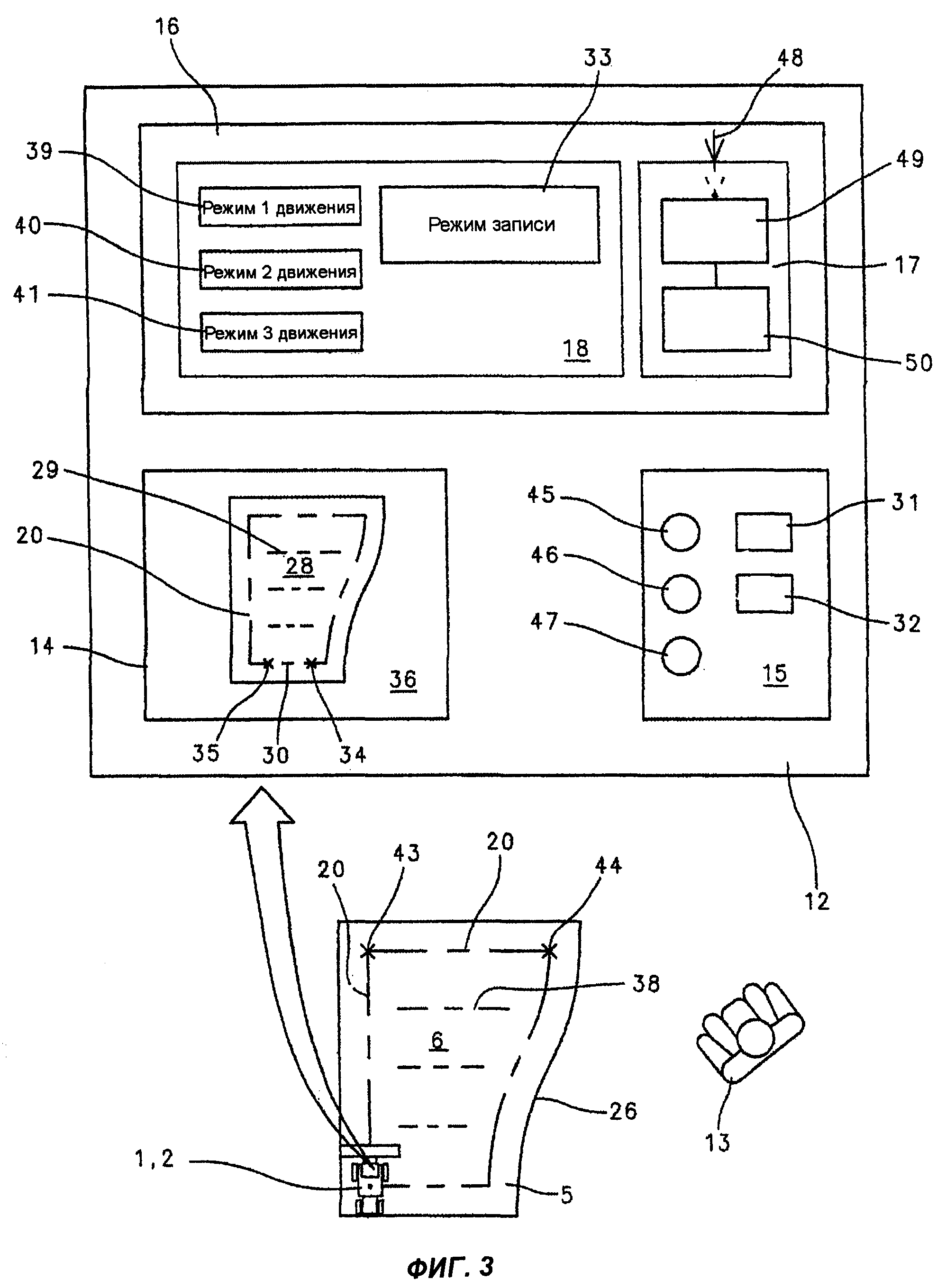
На фиг.3 представлена схема, поясняющая принцип генерирования маршрутов и требуемую для этого структуру программирующего модуля 16. В нижней части фиг.3 показаны подлежащая обработке территория 5, рабочая сельхозмашина 1 в виде зерноуборочного комбайна 2 и подлежащие обработке различно структурированные маршруты 20 движения. В верхней части фиг.3 в увеличенном виде показано устройство 12 управления и обработки данных со схематичным представлением процесса генерирования данных. Как уже было описано, устройство 12 управления и обработки данных содержит блок 14 индикации, блок 15 ввода и программирующий модуль 16. Далее, в программирующем модуле 16 содержатся, по меньшей мере, один модуль 17 системы маршрутизации и навигационный модуль 18 в соответствии с изобретением. В целях наглядности на фиг.3 показано резкое разграничение между навигационным модулем 18 и модулем 17 системы маршрутизации, однако в рамках изобретения они могут быть объединены в программирующем модуле 16.
Согласно изобретению в навигационном модуле 18 заложены режимы 39-41 автоматического движения и, по меньшей мере, один режим 33 записи задающей линии 30. В показанном примере осуществления режимы 39-41 автоматического движения содержат:
первый режим 39 автоматического движения «Движение по прямолинейному участку, ограниченному начальной точкой и конечной точкой»;
второй режим 40 автоматического движения «Движение по контурному участку, ограниченному начальной точкой и конечной точкой»;
дополнительный режим 41 автоматического движения «Движение по контуру без ограничения начальной точкой и конечной точкой».
Само определение режимов 39-41 автоматического движения указывает на их структуру, а именно режимы 39 и 40 автоматического движения направляют сельхозмашину 1 по маршрутам, определяемым начальной точкой 43 и конечной точкой 44, причем маршрут 20 образован прямолинейным участком или криволинейным контурным участком. В противоположность этому в дополнительном режиме 41 автоматического движения вначале обеспечивается движение рабочей сельхозмашины 1 по первому наружному маршруту 20 движения, например, копирующему внешний контур 26 подлежащей обработке территории 5. При этом движение по этому крайнему наружному маршруту 20 управляется автоматически или оператором 13 в зависимости от того, имеются ли географические данные маршрута или нет. В представленном примере осуществления конкретный режим 39-41 автоматического движения может выбираться с помощью переключателей 45-47 предварительного выбора.
Как уже было описано, может также активизироваться или останавливаться заложенный в навигационном модуле 18 режим 33 записи посредством, например, клавиш 31, 32 включения и выключения или посредством определения начальной и конечной точек 34, 35 задающей линии 30 на сенсорном мониторе 36. Использование сенсорного монитора 36 имеет дополнительное преимущество в том, что в этом случае выбор задающей линии 30 может производиться в любой момент времени, если на сенсорном мониторе 36 представлено множество уже обработанных и/или еще подлежащих обработке маршрутов 20, 29. В предпочтительном примере выполнения различные режимы 39-41 автоматического движения увязаны с режимом 33 записи таким образом, что, с одной стороны, запись задающей линии 30 может производиться в любом из имеющихся режимов 39-41 автоматического движения и, с другой стороны, она может производиться независимо от того, активизирован ли один из имеющихся режимов 39-41 автоматического движения. За счет этого создана возможность запуска режима 33 записи в ходе первого выполнения одного из режимов 39-41 автоматического движения и генерирования задающей линии 30, которая затем используется для разработки маршрутов 29 для другого режима 39-41 автоматического движения, отличного от того режима, во время которого была активизирована запись. Так, например, режим 33 записи может быть запущен, в то время как рабочая сельхозмашина 1 работает в режиме 41 «Движение по контуру без ограничения начальной точкой и конечной точкой», и обеспечивает запись задающей линии 30. Далее эта задающая линия 30 привлекается для генерирования маршрутов 29 для режима 39 «Движение по прямолинейному участку, ограниченному начальной точкой и конечной точкой». За счет того что во время движения вдоль контура начальная точка 34 и конечная точка 35 движения уже были определены описанным образом для записи задающей линии 30, режим 33 записи генерирует прямолинейный участок между этими двумя точками 34, 35 в качестве задающей линии 30.
В представленном примере выполнения по фиг.3 рабочая сельхозмашина 1 эксплуатировалась бы, например, в третьем режиме 41 автоматического движения для обработки маршрута 20, определяющего внешний контур 26 подлежащей обработке территории 5. Однако в рамках изобретения возможна также работа машины 1 в одном из других режимов 39, 40 автоматического движения или переход с одного режима 39-41 на другой режим 39-41 автоматического движения. Как только зерноуборочный комбайн 2 доходит до нижнего прямолинейного участка, оператор 13 комбайна 2 активизирует клавишу 31 для определения начальной точки 34 записи. В конце этого прямолинейного участка оператор нажимает на клавишу 32 выключения, так что запись прерывается определением конечной точки 35. Участок пути между начальной и конечной точками 34, 35, образует задающую линию 30, которая в простейшем случае записывается в памяти устройства 12 управления и обработки данных и образует входную информацию 48 для системы 17 маршрутизации по изобретению. Система 17 маршрутизации содержит так называемый модуль 49 функции 50 рядов (Beetfunktion), в котором на основе созданной задающей линии 30 еще подлежащая обработке остаточная территория 28 заполняется маршрутами 29 и закладывается в так называемую функцию 50 рядов. Обработка теперь уже записанной в памяти функции 50 рядов может осуществляться либо путем целенаправленного вызова, либо путем того, что оператор 13 направляет рабочую сельхозмашину 1 в культуру 6 параллельно положению созданной задающей линии 30, а программирующий модуль 16 автоматически распознает, что теперь обработка следует по записанной функции 50 рядов. В рамках изобретения возможен вариант осуществления, при котором в программирующем модуле 16 может быть заложено множество функций 50 рядов и каждая функция 50 рядов содержит различно структурированные маршруты 20, 29. При этом различная структура маршрутов 20, 29 может охватывать как конфигурацию, например, в виде прямых и кривых линий, так и ее расположение на подлежащей обработке территории 5, то есть ориентацию относительно частей света (север-юг, восток-запад).
Для специалиста в данной области понятно, что при осуществлении изобретения возможны различные изменения и модификации описанной системы 17 маршрутизации, не выходящие за пределы объема защиты, а также использование ее в других машинах для получения описанных преимуществ.
Реферат
Изобретение относится к сельскому хозяйству. Для генерирования маршрутов движения на территории за рабочей сельхозмашиной закрепляется определенная рабочая ширина захвата. Генерирование маршрутов производится в навигационном модуле, который содержит один или несколько режимов автоматического движения и, по меньшей мере, один режим записи. Режим или режимы автоматического движения и, по меньшей мере, один режим записи могут быть активизированы независимо друг от друга. Предложенный способ позволяет быстро и с высокой точностью намечать маршруты для подлежащей обработке территории со значительным снижением затрат на разработку маршрутов. 9 з.п. ф-лы, 3 ил.
Формула
Документы, цитированные в отчёте о поиске
Способ эксплуатации комбайна и устройство для его осуществления
Комментарии