Способ эксплуатации комбайна и устройство для его осуществления - RU2152147C1
Код документа: RU2152147C1
Чертежи
Описание
Настоящее изобретение касается способа эксплуатации комбайна, который в целях оптимизации его производительности на уборке урожая постоянно управляется извне оператором посредством управляющего процессора, содержащим в себе задаваемые и/или предельные эксплуатационные данные, и изнутри при постоянном замере и анализе фактических эксплуатационных данных, в частности ходовых данных, обеспечивается регулируемая эксплуатация, причем абсолютные и/или относительные координаты положения комбайна постоянно фиксируются, соотносятся с ними результаты удельной урожайности, в частности в виде кадастра данных урожайности, и переводятся в память для дальнейшего использования в виде исторического кадастра данных.
Такой комбайн известен из WO86/05353.
В нем постоянно осуществляется прием сигналов, несущих в себе результат замера пути, и/или сигналов местоположения, определяемого радиосредствами и с учетом этих сигналов постоянно составляется кадастр специфичных данных замеров урожайности. Такой кадастр урожайности служит впоследствии для определения оптимального количества применяемых удобрений и средств для борьбы с вредителями и/или для управления работой сеялки или почвообрабатывающей машины, с тем, чтобы в соответствии с удельной урожайностью, зависящей от характера и свойств почвы, оптимально производить сеяние или управлять интенсивностью обработки почвы.
Кроме того, из заявки Германии DE 4223585 A1 известно устройство для внесения в почву сельскохозяйственного материала, управление работой которого производится посредством содержащихся в граничном кадастре контуров поля и аппарата радиоопределения, в результате чего указанный материал вносится в почву лишь внутри контура и вблизи его границ. Кроме того, предусмотрена возможность следить оператору за границами контура и местонахождением управляемого аппарата на дисплее.
Кроме того, в патенте заявителя DE P 43834.1 описан комбайн приведенного выше типа, содержащий в себе приводимое в действие процессором устройство управления и регулировки, обеспечивающее оптимальное использование на уборочных работах благодаря диалоговому управлению оператором, представляющее оператору постоянно задаваемые, предельные и фактические эксплуатационные данные на дисплее в виде пиктограмм и алфавитно-цифровых окон и составляющее кадастр сбора урожая для его последующего использования.
Целью изобретения является дополнительно облегчить условия работы комбайнера и обеспечить более высокую оптимизацию уборочных работ за счет высокой производительности при относительно низких удельных потерях урожая при наличии на данном участке поля различных видов с.х. культур и неодинакового их состояния, а также исключить случи перегрузок и повреждения машин.
Данная цель достигается за счет того, что управляющий процессор комбайна имеет возможность обращения к историческому кадастру данных и при указании соответствующих координат положения комбайна, в сочетании с его ходовыми данными, обращается к хранящимся в нем историческим данным, превосходящая при этом текущие координаты, производят считывание и определяет и заново задает новые требуемые или предельные эксплуатационные параметры.
Предпочтительные варианты исполнения представлены в дополнительных пунктах формулы изобретения. Сущность принципа заключается в том, что данные кадастра, полученные в прошлые годы при использовании комбайна или обработке соседних участков, используются в качестве основы для получения задаваемых или предельных параметров, чем и достигается оптимизация регулирования, при этом данные предварительно обрабатываются и до попадания в критическую зону поля, в которой, например, культура имеет большую густоту или зерновая культура полегла в неблагоприятном направлении, или поверхность переходит в уклон, происходит адаптация к условиям эксплуатации, в результате чего исключается преимущественно перенагрузка или повреждение механизма косилки или молотилки. В частности, в этом случае, когда до этого уборка урожая велась на повышенной скорости, при наличии незначительной густоты убираемой культуры, скорость уменьшается или в случае изменения величины уклона, или степени неровности почвы механизму регулирования степени наклона режущего устройства, и/или механизму регулирования высоты резания задаются новые задаваемые или предельные параметры.
Для обеспечения по возможности точно отвечающих местности, задаваемых режимных параметров необходимо, во-первых, чтобы выполнялся анализ содержащихся в кадастре данных на предмет подлинности места их возникновения, т. е. чтобы производилась коррекция на величину пути, пройденного комбайном во время паузы между прекращением косьбы урожая и получением соответствующей величины замера, и чтобы, во-вторых, константа времени регулировки соответствующего устройства принималась во внимание, т.е. заранее определялись координаты кадастра в соответствии с путем, пройденным комбайном в течении времени, соответствующего константам времени регулировки, в том случае, когда новая регулировка более неточна и ведет к повышению скорости или меньшей высоте срезания. В том случае, когда выведенные из исторических данных задаваемые или предельные режимные параметры не могут быть непосредственно введены в регулятор, а посредством визуализации рекомендуются оператору для регулировки, необходимо учитывать также его время реакции.
Дополнительная предусмотрительность при образовании задаваемых и предельных данных показана и в том случае, когда используется не полный кадастр, а лишь та его часть, в которой содержатся данные о последних, выполненных рядом проходов снятия урожая, при этом производится анализ изменений данных по прилегающим соседним, расположенным спереди и сзади зонам, в которых выполнены проходы комбайном, на наличие косо направленной кривой изменения почвы или снимаемого урожая по отношению к направлению проходов и в соответствии с этим производится экстраполяция в отношении важного для использования данных местоположения комбайна с учетом констант времени регулировки и связанного с ними пройденного расстояния и степени убытков вследствие предусмотренной регулировки. В результате режимные параметры автоматически устанавливаются на косо направленную по отношению к направлению движения кривую изменения снимаемого урожая, т.е. на косо направленного по отношению к направлению движения границу плодородия; такая установка режима, ввиду отсутствия для водителя возможности наблюдения, часто вручную не возможна, поскольку путь, пройденный до момента замера величины, и путь, пройденный до окончательной регулировки машины, составляют до 50 м.
В качестве эксплуатационных данных учитываются в кадастре предпочтительно не только соотнесенные с поверхностью удельные количества урожая зерна, но и его относительные потери, количество получаемой смолы и в некоторых случаях также задаваемые и предельные эксплутационные данные. В соответствии с этим управление работой может производиться по выбору по различным критериям, например по большой производительности или по малым потерям зерна или соломы. Установленные предельные и задаваемые эксплуатационные данные предпочтительно вводятся в регулирующее устройство либо непосредственно, либо выводятся в кабину комбайна на дисплей. В любом случае комбайнеру для перестраховки предоставляется возможность ручного изменения управления, в результате чего он может либо снизить скорость движения комбайна, либо остановить его, либо поднять режущее устройство для преодоления препятствий и предупреждения перегрузок.
Само собой разумеется, что аналогичным способом могут задаваться ширина захвата, высота реза, а также другие регулируемые параметры комбайна, как, например, скорость вращения барабана, число оборотов воздуходувки и подающего шнека, скорость элеватора и установка решеток на основе данных кадастра. При этом необходимо естественно учитывать соответствующую продолжительность прохождения убираемой культуры до участка замера соответствующей величины и время регулировки устройства на встречные действия управления, как это будет показано в примерах.
Особо экономичное использование памяти при составлении данных кадастра имеет место в том случае, когда в память заводятся эксплуатационные данные - координатная пара лишь тогда, когда подлежащий хранению в памяти эксплуатационный параметр претерпел изменение на заданную относительную или абсолютную величину. Такой способ хранения в памяти облегчает кроме того экстраполяцию изменения эксплуатационных данных, касающихся соседних проходов, применительно к положению на момент передвижения, поскольку хранящиеся в памяти данные отнесены к более крупным изменениям, эксплуатационных данных, хранящихся в памяти разности координат между точками аналогичных изменений эксплуатационных данных, относящихся к убранным участкам, должны быть перенесены на убираемые в настоящий момент участки, а для этого необходимо заимствовать соответствующие эксплуатационные данные.
Координаты положения соседних убранных участков соотносятся с начальной точкой, в результате даже при наличии зависящих от пути координат процесс запоминания протекает независимо от направления перемещения комбайна и при соотнесении с подлинным местоположением.
В отношении комбайнов отмечается стремление обеспечить их максимальную производительность при доступных потерях зерна или поддерживать на постоянном уровне производительность, оптимальную по мнению комбайнера. Рабочие органы комбайна при их регулировке приводятся в соответствии с такой производительностью и тем самым обеспечиваются оптимальные результаты работы. Постоянно чередующаяся густота убираемой культуры непосредственно влечет за собой, при перемещающемся с постоянной скоростью комбайне, колебания производительности. Для достижения постоянной производительности и/или регулировки рабочих органов должна производиться регулировка или управление скоростью движения и/или установки рабочих органов комбайна. С этой целью для комбайна были сконструированы различные устройства измерения производительности. Благодаря созданным на их основе устройствам регулировки скорости движения было получено, например, существенное увеличение производительности. Недостатком является при этом то, что замер количества культуры можно произвести только при ее наличии в комбайне. В результате реакция возможна только при существенных колебаниях густоты культуры.
Благодаря предварительному анализу исторических данных достигается устранение недостатка, выражающегося в обратном регулировании. Однако известные приемы оптимизации обратного регулирования могут быть с пользой сохранены для второстепенного регулирующего шлейфа.
Режимные параметры прошлого года, занесенные в кадастр, приводятся в соотношение с текущими данными и адаптируются пропорционально последним.
Когда на одном поле работают несколько комбайнов, то замер производительности и коррекцию карты данного поля производит только одна машина. По радиосвязи поправки передаются на другие комбайны на данном поле, которым нет необходимости в замере производительности, но которым следует иметь на борту систему радиоопределения или навигации.
Подготовка корректирующих данных может производиться и стационарной вычислительной машиной, расположенной, например, на краю поля. С комбайна с устройством измерения производительности и системой радиоопределения или навигации данные об урожайности и о положении посылаются на стационарную вычислительную машину. Данные, содержащие поправки урожайности, по радио передаются на один или несколько находящихся на поле комбайнов. Дополнительно к таким поправкам по такому тракту радиосвязи могут передаваться и данные по коррекции положения, требуемые, например, при пользовании дифференциальным методом спутниковой навигации (DGPS).
Представленные здесь приемы, при которых во внимание принимаются достоверные границы плодородия, константы времени регулирующих устройств, данные, полученные из соседних участков, и значимость риска планируемой коррекции регулировки могут быть применены для любой другой машины, используемой для уборки урожая, или с. х. машины, для которой требуется одна или несколько регулировок в зависимости от одного или нескольких коррелирующих с данными о различии плодородия или характере почвы параметров.
Предпочтительные варианты осуществления изобретения описаны с использованием фиг. 1 -7.
На фиг. 1 изображена общая схема соединений комбайна
с сетью мультипроцессора, а также вырывы с разной степенью увеличения;
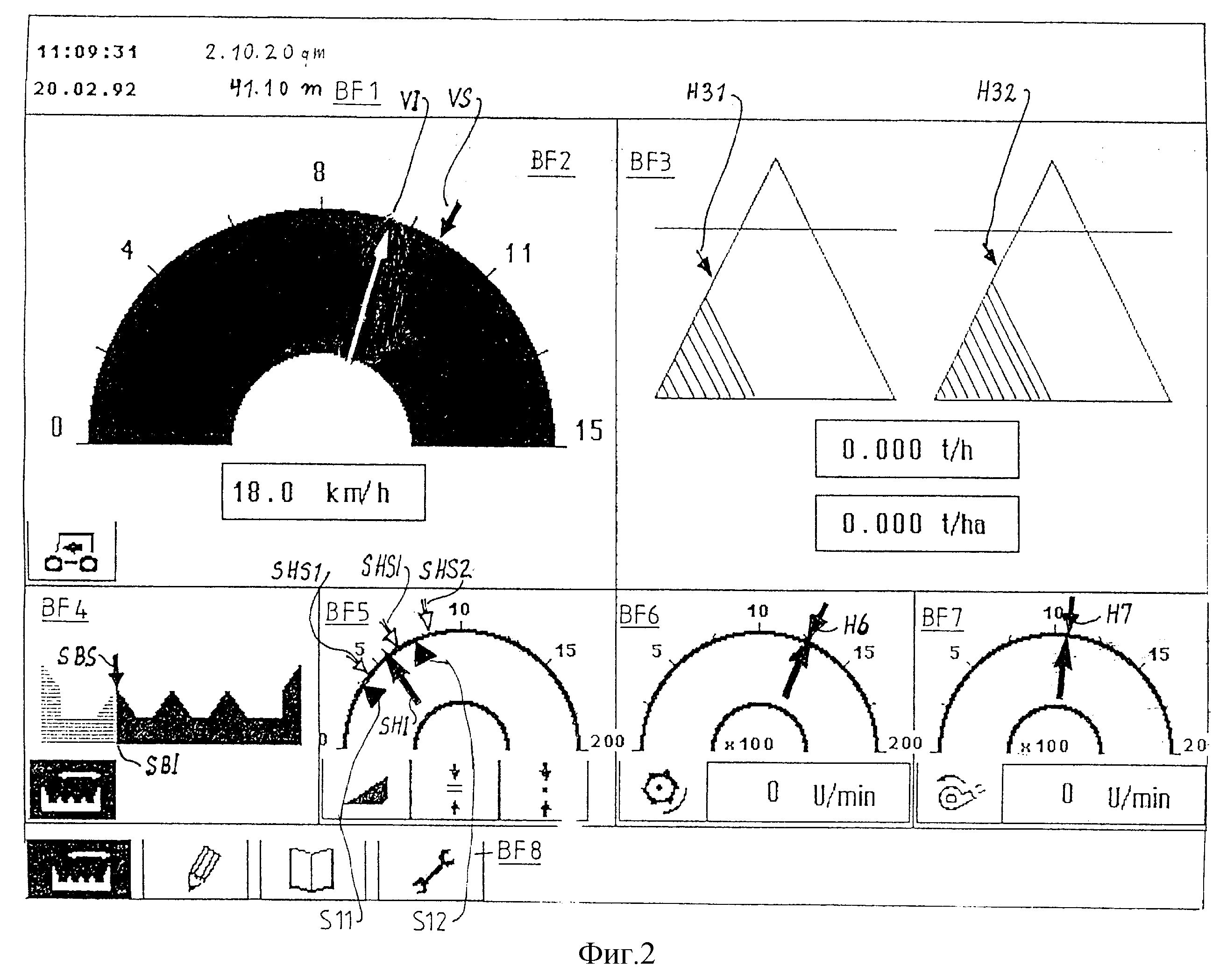
фиг. 2 - маска с изображением движения;
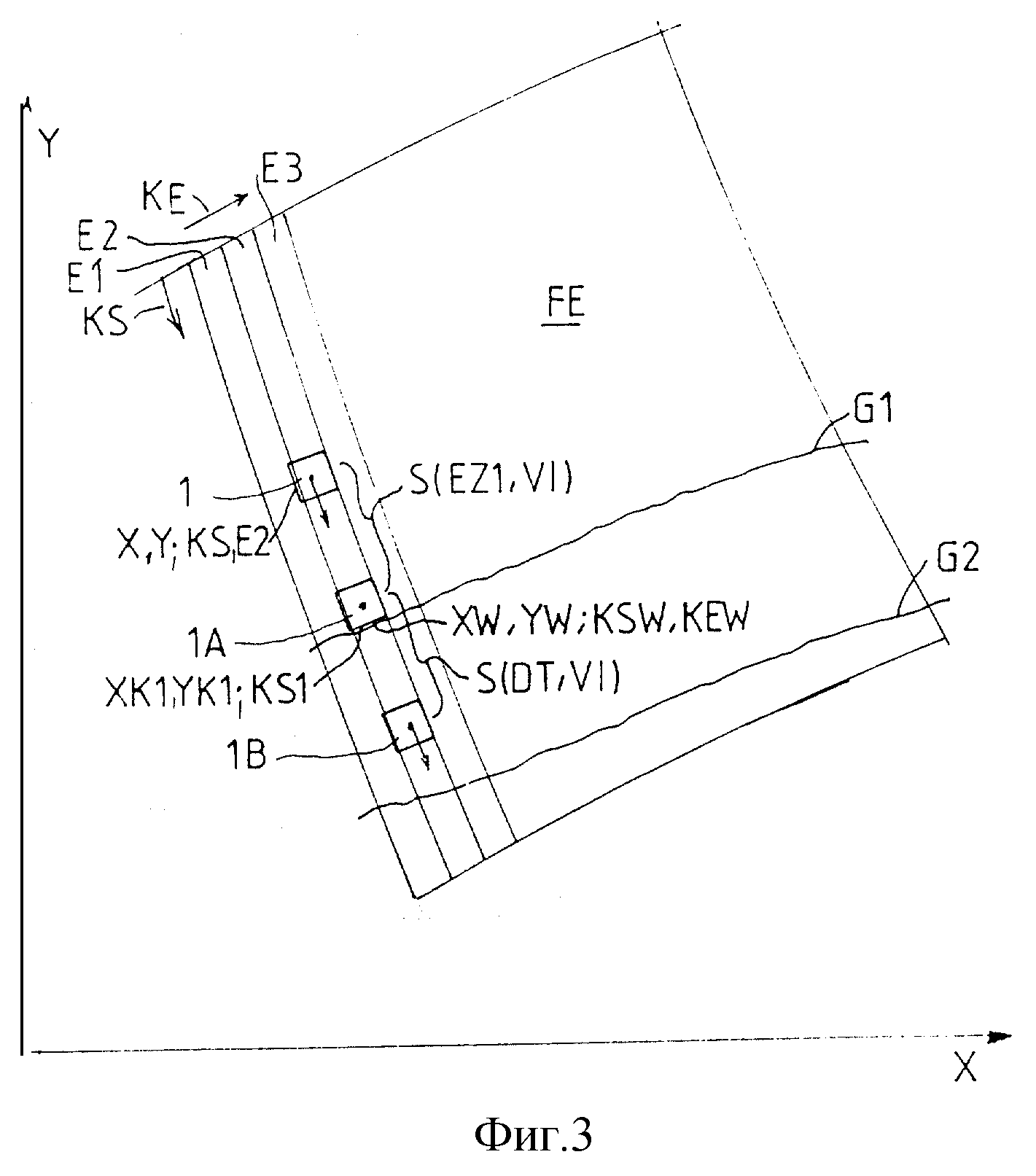
фиг. 3 - карта поля с текущим, будущим и историческими положениями
комбайна в абсолютной координатной сетке;
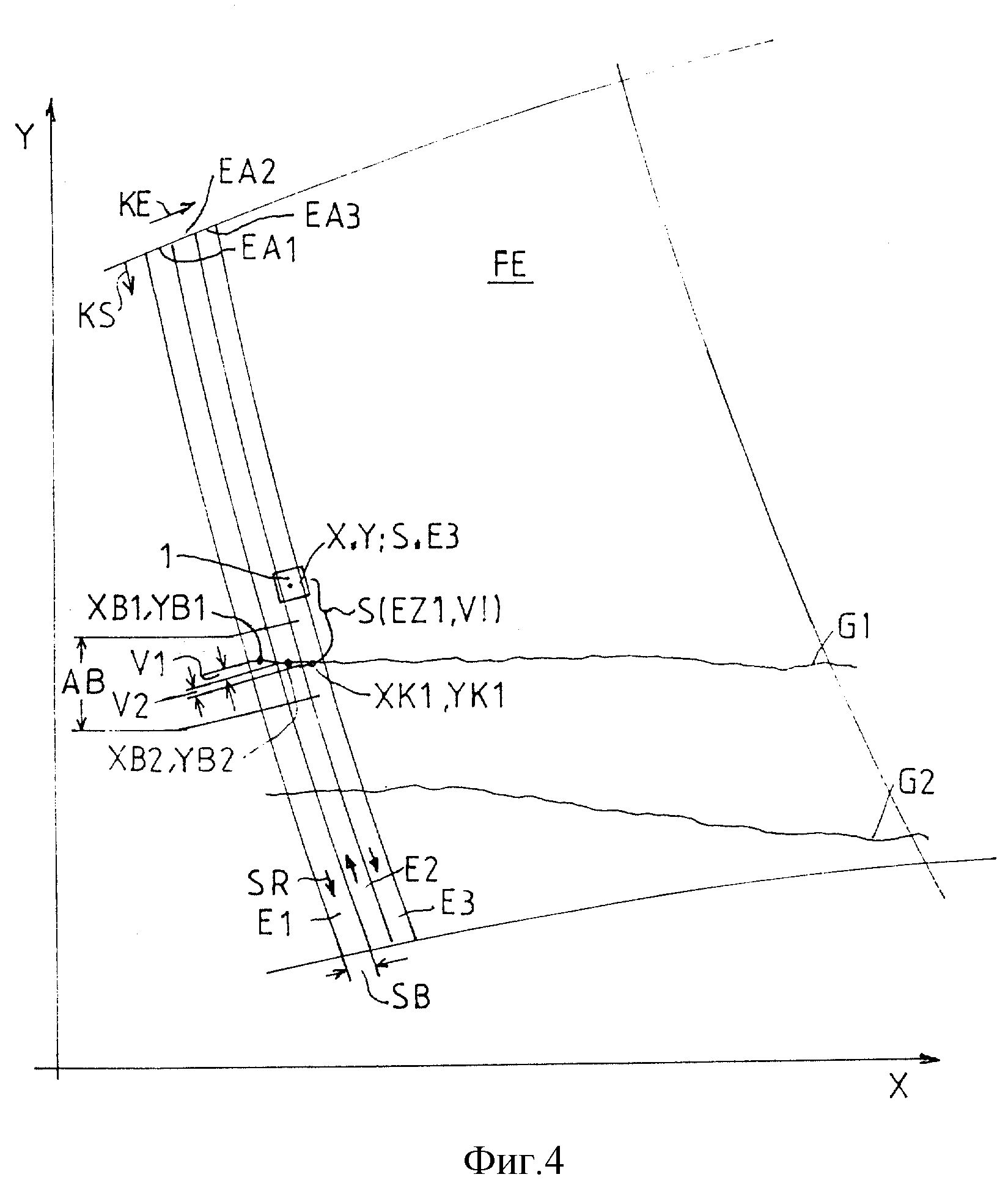
фиг. 4 - карта поля с точками экстраполяции и координатами траектории;
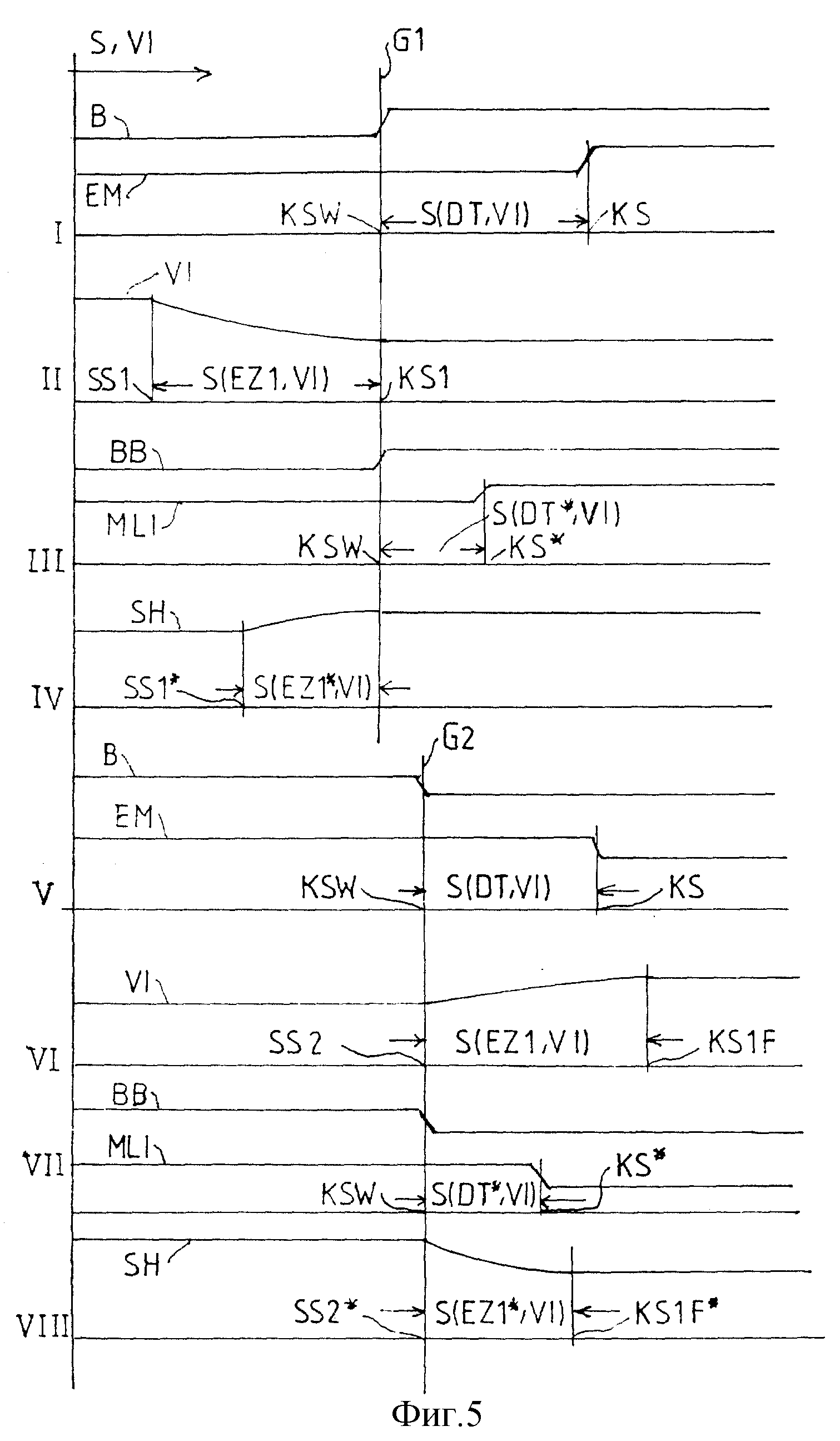
фиг. 5 - схема местности при разных случаях применения комбайна;
фиг. 6 - блок-схема всего устройства;
фиг. 7 - блок-схема устройства с системой радиосвязи.
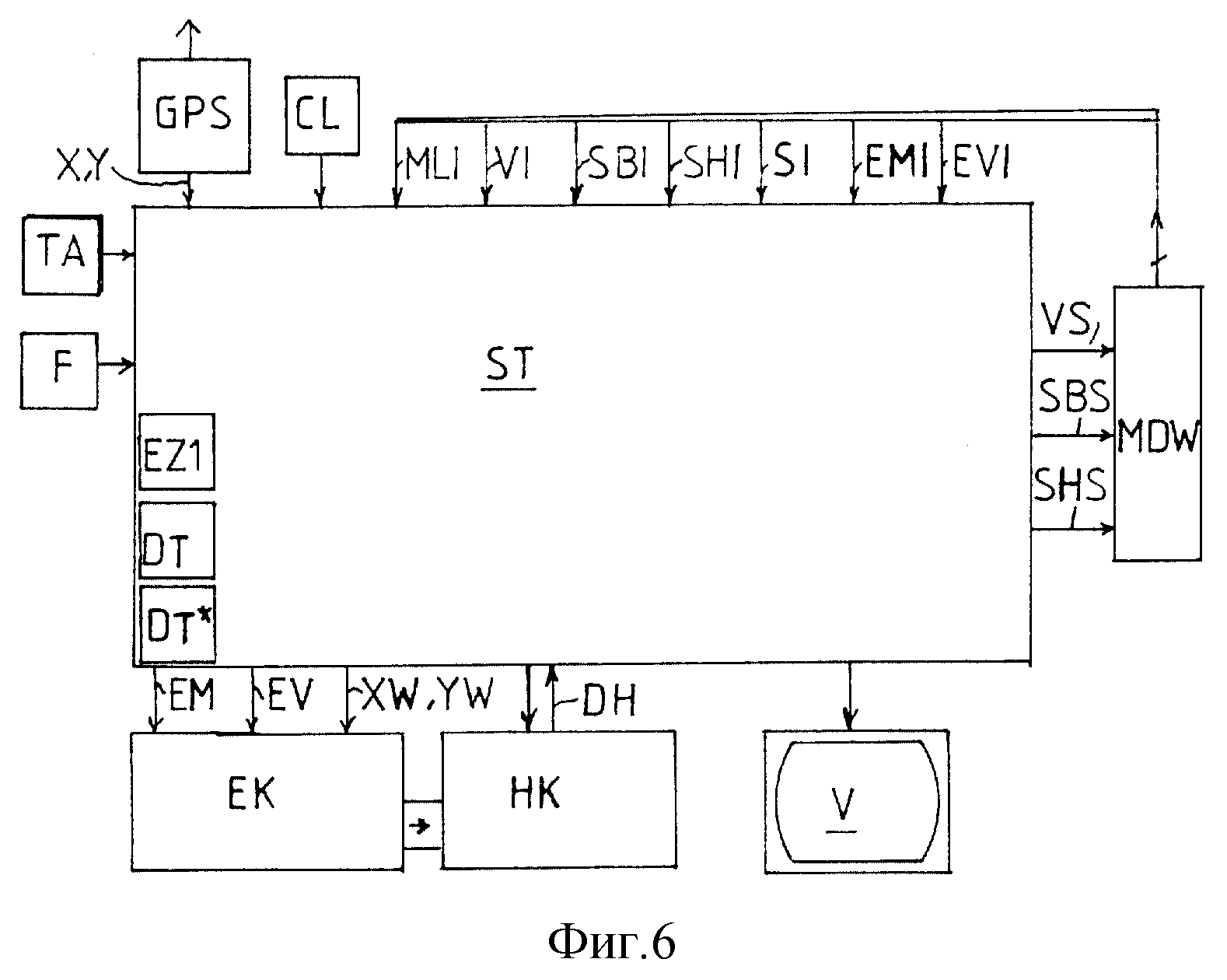
На фиг. 1 показана общая схема соединений комбайна с устройством управления (ST), имеющим сеть микропроцессора с шиной (B). В кабине комбайнера (1) установлен процессор (M1) с пультом управления, на резальном механизме (2) установлен второй микропроцессор (M2) для управления и регулировки процессом резания, на приводе и ходовой части (3) - третий микропроцессор (M3), на молотильном механизме (4) - четвертый микропроцессор (M4) и на механизме подачи и очистки (N) - пятый микропроцессор (MN), контролирующий потоки материала.
Каждый из микропроцессоров (M1 - MN) через контур интерфейса (SS) соединен с центральной шиной связи (B). Главный процессор (M1) в настольном исполнении управляет дисплеем (V) и в свою очередь управляется посредством клавиатуры (TA) с семью клавишами (T9-T14), обеспечивающими диалоговый режим работы с экраном, и эргономно расположенными на рукоятке регулирования подачи топлива (F) клавишами установки резального механизма (T15-T18). При необходимости устанавливается локатор (GPS), постоянно передающий на главный процессор (M1) координаты положения.
На экране индицируется текущее время, дата, данные о характере поверхности, маршруте (BF1), скорости движения (BF2), потерях зерна и производительности при уборке (BF3), ширине захвата (BF4), шлака нормативов высоты реза с указанием задаваемых величин высоты реза (BF5), число оборотов молотильного барабана (BF6), скорость вращения воздуходувки (BF7) и инструментальная панель главных меню (BF8). Функциональными клавишами клавишного поля (TA) являются подтверждающая клавиша (T9) для открытия меню, подтверждения установочного механизма, для передачи и прекращения передачи заданий, клавиша курсора "справа" (T10) клавиша курсора "слева" (T11) для выбора кнопки меню; от первой кнопки меню можно перемещаться "левым" курсором до последней кнопки и наоборот; клавиша +/- (T12) служит для установки значений, возвратная клавиша (T13) - для перехода на следующую, более высокую ступень меню, вспомогательная клавиша (T14) - для вызова пояснительного текста для задействованной кнопки меню. Повторное нажатие этой вспомогательной клавиши возвращает к кнопке меню. Когда клавиши в нажатом положении удерживаются длительное время, то функция клавиши автоматически повторяется несколько раз. На ручке регулировки подачи топлива (F) расположены клавиши: нажимной переключатель (T15) устройства подъема резального механизма, нажимной переключатель (T16) устройства опускания резального механизма (T16), нажимной переключатель (T17) автоматики начальной установки высоты резания и нажимной переключатель (T18) автоматики установки контура.
На дисплее (V) имеется восемь окон (BF1-BF8), в которых изображаются пиктограммы (P1), передающие в аналоговой форме режимные параметры, цифровые данные (Z1) для вывода цифровых данных, а для других режимов - тестовые данные.
Окна для индикации текущего времени (BF1) и выбора меню (BF8) всегда имеют одинаковый вид, в них время и дата указываются при постоянном обновлении посредством внутреннего электронного времени, а индикация меню вызывается воздействием на клавишу управляющей клавиатуры (TA), причем символы индицируемого главного меню на текущий момент изображаются массивными, в остальных случаях - прозрачными.
Детали приведены на фиг. 2, на которой показан урожай и на которой также показаны слева тахометр, а в правом большом окне (BF3) в форме двух треугольных пиктограмм постоянно величина потери зерна и производительность при уборке урожая. В расположенных ниже окнах меньшего размера (BF4 - BF7) приведены и снабжены цифрами рабочая ширина (SB1), начальная установка высоты резания (SH1), число оборотов молотильного барабана, число оборотов воздуходувки и число оборотов двигателя с его нагрузкой.
В отдельных окнах (BF2 - BF7) показаны с помощью разных и неодинаково расположенных символов текущие значения измеряемых величин (V1, SB1, SH1, S11, S12), а также важные для соответствующей местности исторические эксплуатационные данные (V8, SBS, SHS, SHS1, SHS2, H31, H32, H6, H7). Во втором окне (BF2) показана фактическая скорость (V1) - изображение выполнено как бы иглой тахометра, а вне шкалы - историческая задаваемая скорость (VS).
В третьем окне (BF3) в виде угловой зоны приводится индикация текущих значений потерь в сотрясательном механизме и при просеивании через сито и дополнительно исторические значения потерь (H31, H32), трансформированные с учетом урожайности на донной площади. Является очевидным, что размеры потерь против прежних уменьшились.
В четвертом окне (BF4) приводятся данные по фактической и заданной установке ширины захвата (SH1, SHS).
В пятом окне (BF5) снова показаны внутри и вне шкалы фактическая высота резки (SH1) и историческая заданная высота резки (SHS). К этому добавляется индикация предельных показателей (S11, S12) заданной комбайнером высоты срезания и расположенные снаружи заданные предельные значения (SHS1, SHS2), выведенные из исторических данных. Ввиду того, что задаваемые предельные показатели ниже исторических, то очевидно, что последние подаются в регулятор не прямо, а используются оператором в качестве подсобного средства при отыскании новой, более оптимальной уставки с получением низкого жнивья. Непосредственная или опосредованная установка регулирующих данных может осуществляться выбором клавиш, предусмотренных для отдельных окон. Какие из предельных показателей будут использованы активно и какие только для информации, это определяется массивным или отсутствующим представлением соответствующих символов. На активно используемые предельные показатели (S11, S12) распространяется внутреннее регулирование оптимизации высоты срезания. Помимо отображения фактических и задаваемых эксплуатационных данных - и в результате перерегулировки - появляются на экране в разных его окнах (BF2 - BF7) сигналы и важные сообщения. Сигнал тревоги поступает в том случае, когда задается установка или предельный параметр, оцениваемый на основе исторического параметра как рискованный, т.е. либо слишком заниженная высота срезания, либо слишком завышенная скорость, допускаемые оператором и способные причинить ущерб. Аварийная ситуация могла бы наступить, например, в том случае, когда в окне (BFS) индикатора высоты срезания появляется индикация фактической высоты срезания (SH1), величина которой меньше исторического нижнего предельного значения (SHS1).
Сигналы тревоги представляют собой особую форму сообщений с более высоким приоритетом. Они имеют оптический и акустический вид и подлежат подтверждению со стороны оператора. Оптический сигнал состоит из символа и пояснительного текста и накладывается на прежнее содержание дисплея. После подтверждения сигнала тревоги последний принимает форму сообщения.
Через короткие интервалы времени производится определение действительной скорости движения, сигналов пути и состояние резального механизма "включен", "выключен" и в целях определения положения и адресация кадастра, а также для индикации и представления в качестве регулирующих параметров производится их обработка.
Наряду с этим главным процессором (M1) периодически производится обмен с процессором (М3) на приводе и ходовой части следующей информацией:
принимаются сведения
о
- ширине захвата 1/1 - 1/4.
- рабочей ширине,
- стат, радиусе х передаточное число,
- верхнем пределе числа оборотов двигателя на холостом ходу,
- числе оборотов двигателя при полной нагрузке,
- мин. числе оборотов при работе,
- допустимом проскальзывании,
передаются сведения о
- обрабатываемой площади,
- производительности на единицу площади,
- пройденном расстоянии,
- количестве рабочих часов,
- продолжительности эксплуатации в часах,
- напряжении в
бортовой сети,
- нагрузке на двигатель,
- числе оборотов воздуходувки,
- числе оборотов молотильного барабана.
Последние данные служат преимущественно для выдачи информации об урожае и учетной информации, а также для составления кадастра урожайности, предназначенного для корректировки данных о производительности по зерну, определяемых процессором (MW) механизма подачи и очистки и периодически им передаются, а также накапливаются в памяти в виде текущей и хранимой информации.
Постоянная связь, сопровождающаяся короткими периодами срабатывания, присутствует в особенности между главным процессором (M1) и процессором (М2) регулятора резального механизма, поскольку сигналы командных клавиш (T15 - T18), расположенных на рукоятке регулировки подачи топлива (F), необходимо незамедлительно преобразовывать в управляющие воздействия, обеспечивающие установку соответствующей высоты и наклона резального механизма, поскольку такая установка обеспечивает оптимальный захват хлеба, имеющего разную высоту и/или разную степень полегаемости, предупреждает повреждения резального механизма камнями или неровностями почвы, а также исключает перегрузку питателя при заданной скорости движения и ширине захвата, определяемые продольным и поперечным наклоном рукоятки регулировки подачи топлива (F).
Для связи с
процессором (М2) на резальном механизме предусмотрена преимущественно следующая периодическая информация:
принимаемая
- скорость,
- увеличение или уменьшение высоты срезания,
- уставки для обоих автоматов, обеспечивающих снижение, уставки для регулятора высоты срезания;
передаваемая
- фактические показатели автоматов, обеспечивающих снижение,
- фактические показатели правых и левых почвенных зондов.
- "включение", "выключение" оконтуривающей автоматики,
- установки регулятора высоты срезания "включено",
"выключено".
Кроме того, передаются сигналы тревоги, имеющие приоритет и сообщающие о превышении заданных фактических и предельных показателей, а также о нарушениях исполнительных органов и магнитных клапанов в гидравлических устройствах регулировки высоты и наклона.
Фактические показатели для установки высоты срезания и наклона выводятся на основе давления опирания (замеряемого на пружине резального механизма) и расстояния до грунта (замеряемого над зондом-скобой). В результате этого комбайнер располагает возможностью плавной и оптимальной установки давления опирания и расстояния между грунтом и резальным механизмом.
Для того, чтобы резальный механизм имел параллельную направленность по отношению к почве, а высота срезания сохранялась постоянной по всей ширине резального механизма, наряду с регулировкой по высоте производят еще поперечную регулировку. При такой поперечной регулировке производится сравнение расстояния до почвы слева и справа, и, в случае отклонений на гидравлику, обеспечивающую наклон, подаются сигналы коррекции.
Благодаря понижающей автоматике комбайнер имеет возможность заранее выбрать высоту резального механизма, например свыше 100 мм. Заранее заданная высота автоматически устанавливается. При движении комбайна комбайнер может произвести переключение с программы понижающей автоматики на программу регулирования высоты срезания и нажатием на клавиши задать разную высоту расположения резального механизма. Такие функциональные переключения производятся преимущественно посредством переключателей на многофункциональной ручке (F) рычага регулировки подачи топлива. Верхний переключатель (T17) служит для вывода резального механизма из расположенной вблизи почвы контурной зоны автоматической установки в более удаленную от почвы зону установки резания. Нижний переключатель (T18) предназначен для опускания резального механизма в положение контурной автоматики, которое может находится либо в зоне задаваемой начальной установки высоты срезания, либо в зоне заданной регулировки высоты срезания. Этот вопрос решается только после поступления соответствующей уставки, задаваемой либо самим комбайнером, либо определяемой на основе содержащихся в кадастре данных и постоянно задаваемой.
Предусмотрено два способа ввода уставки. При первом способе значение уставки может изменяться при воздействии на клавиши +/- (T12) на клавиатуре (TA). Такое изменение уставки может задаваться в рабочее меню. Система поддерживает ввод в результате того, что положение курсора определяет автоматика, начальная установка которой была выполнена комбайнером посредством клавиши многофункциональной ручки (F). Уставка наращивается малыми величинами (2,5%). Терминал передает при этом сообщение "приращение" или "декремент", адресованное процессору (М2) на резальном механизме, который реагирует новой уставкой. Так производится расчет новой уставки централизовано на одном участке. Возможно, кроме того, предварительно задавать уставки (S11, S12), фиг. 2, а подменю: установка контура.
Во втором способе комбайнер имеет возможность воспринимать текущее фактическое значение в качестве повой уставки. С этой целью посредством клавиш (T15, T16), обеспечивающих подъем и опускание резального механизма, последний может быть приведен в требуемое положение, после чего при длительном нажатии (свыше 3 с) на соответствующею клавишу автоматики (T17, T18) фактическое значение начинает выступать в качестве новой уставки. Кратковременное нажатие на выключатель обеспечивает опускание резального механизма в положение, соответствующее другой уставке, при этом заданная уставка не меняется. Решение о том, следует ли продолжать движение с использованием прежней уставки или фактическое значение перевести в новую уставку, принимается лишь после прекращения воздействия на выключатель.
Вновь заданные вручную уставки и предельные эксплуатационные данные вносятся в кадастр с целью их использования при уборке на соседних участках. Так при ограниченном числе заездов возможно отыскать оптимальное позиционирование и использовать его при следующих заездах.
Подобно тому, как задаются при регулировке резального механизма стандартные установки, т. е. задаваемые и предельные параметры, на основе которых комбайнер может произвести изменение в связи с отклонением от стандартных условий внешних условий эксплуатации, так это возможно производить и в отношении других узлов комбайна. Для замера урожайности и потерь и для выполнения соответствующих расчетов, по отдельным видам хлебных злаков в память заводятся стандартные величины литрового веса при средних качестве и влажности, в связи с чем после обращения к меню следует выбрать соответствующий вид зерна. Кроме того, периодически могут вводиться полученные извне данные о литровом весе, в том случае, когда отсутствуют автоматические весы. Данные передаются в микропроцессор (MN), измеряющий урожайность и размер потерь, и используются там для обработки результатов измерений, после чего результаты передаются в главный процессор (M1), где они заносятся на пиктограммы окна (BF3) для постоянной выдачи для изображения урожая и для обработки и последующей выдачи временно хранятся в принтере или на кассете (С). В устройство замера потерь зерна, в целях коррекции замеренных сигналов, необходимо ввести указание вида зерна, для которого в памяти содержатся характерные показатели.
При появлении величины потерь, превышающей заданное предельное значение несмотря на произведенную регулировкой оптимизацию, подается сигнал тревоги. Благодаря заметному и очень наглядному отображению потерь на встряхивателе в левом треугольнике и потерь на сите в правом треугольнике окна (BF3) с изображением урожая, фиг. 2, оператор постоянно имеет перед глазами эти важные для обслуживания критерии, в результате чего он постоянно может производить дополнительную оптимизацию, за, счет соответствующего подбора ширины захвата, скорости движения, высоты срезания и возможно путем регулировки сита и воздуходувки.
Эргономичное размещение рычага регулировки подачи топлива (F) в зоне достигаемости правой рукой и расположение клавиатуры (TA) возле правой руки позволяют во время работы легко обращаться за информацией в запоминающее устройство и заново задавать режимные параметры.
Обработка поступающих сообщений в главном процессоре (M1) с выдачей в отдельные его окна происходит на двух
программных уровнях. Поступающее сообщение сначала обрабатывается на фоновом программном уровне с управлением прерыванием следующим образом:
- если в соответствии с идентификатором поступил
сигнал тревоги, то из буфера заимствуется соответствующее сообщение, устанавливается маркер тревоги, определяется соотнесенность сообщения с окном индикации сигнала тревоги (BF3) и делается отметка в
контрольной памяти окна, включается сирена и производится стирание идентификатора;
- если поступает не сигнал тревоги, а уведомление, то соответствующее сообщению уведомление регистрируется в
контрольном поле зоны (BF4) окна сообщений, подается короткий звуковой сигнал, и производится стирание идентификатора;
- если не поступило, ни сигнала тревоги, ни уведомления, а была передана
новая индицируемая величина, то индицируемая переменная величина вводится в контрольную память окна индикации и стирается идентификатор.
Дальнейшая обработка информации из контрольной
памяти окна индикации производится периодически в рамках служебной программы архивных данных. В ней в зависимости от статуса информации в контрольных запоминающих устройствах окон индикации отдельные
виды информации зон индикации сводятся и/или обновляются в памяти индикации;
- если происходит переход на статус "включение молотильного механизма", то подготавливается изображение урожая,
фиг. 2; если присутствует новый статус "выключение молотильного механизма", то появляется цветное изображение маршрута движения;
- если изменяется режим, задаваемый клавишами (T11 - T18), то
соответственно обновляется память статуса меню, и соответствующие устройства памяти статуса поля индикации либо дополняются соответствующими данными, либо производят в них стирание;
- если
сигнал тревоги подтвердился после нажатия на клавишу, то статус тревоги поля индикации тревоги (BF3) стирается в соответствующей зоне статуса поля индикации и выключается сирена;
- после
этого содержащиеся в отдельных запоминающих устройствах статуса поля индикации новые данные с учетом иерархии и в соотнесении с записями сигналов тревоги, сообщений и общей рабочей информации, как,
например, новые фактические и задаваемые величины и изменения статуса меню, обрабатываются в целях управления изменением содержания памяти индикации, в результате чего полностью обновляется содержание
изображения.
На фиг. 3 показана карта поля, выполненная в сетке абсолютных координат положения (X, Y). Обработка поля (FE) ведется полосами ила заходами (E1, Е2, Е3), простирающимися в относительном направлении осей координат (КБ), расположенными друг возле друга и ориентированными в направлении координат пути перемещения (KS). Если проходы выполняются в чередующемся направлении, то и соответственно обрабатываются координаты. Когда, например, комбайн находится в исторической позиции (IB), в которой данные замеров были получены на выходе из нее, то находился он возле участка S (DT, VI), который был им пройден за машинное время (DT) при фактической скорости (V1), и занимал положение (IA) с подлинными координатами (XW, YW, KSW, KEW), при которых данные замеров (эксплуатационные данные) и были записаны в памяти.
При последующем заходе для уборки урожая, когда комбайн окажется в положении (1) с текущими координатами (X, Y, KS, E2), происходит обращение к названным, переведенные в память эксплуатационным данным, которые в этом случае становятся важными для регулировки машины, если только комбайн оказывается в положении (1A) с координатами (XK1, YK1, KS1). Такая целевая позиция (1A) располагается от занимаемой позиции. (1) на расстоянии прогона S (EZ1, V1), который будет пройден комбайном в течение временных констант регулировки машины (EZ1) при скорости (VI).
Если на поле (FE) установлены границы плодородия (G1, G2), в пределах которых для обеспечения оптимального и уверенного режима работы требуется существенно изменить уставки машины, то соответствующие заданные величины вводятся своевременно таким образом, что такое изменение уставок завершается еще до того, как будут достигнуты границы плодородия (G1, G2).
На фиг. 4 показана еще одна карта поля (FE), выполненная в абсолютных координатах (X, Y) с применением относительных координат (KB, KS). Проходы (E1, E2, E3) с шириной захвата (SB) нанесены на карту с учетом начальных точек (EA1 - EA3).
Ha границе плодородия (G1), под координатной парой (XB1, YB1), для первого комбайнового прохода (E1) запиcаны в память скачки эксплуатационных данных, то же самое выполнено для второго прохода (E2) под координатами (XB2, YB2). Когда комбайн занимает положение (1) под координатами (X, Y, B3, S) в третьем проходе (E3), то записанные в память эксплуатационные данные проверяются в опережающей анализируемой зоне (AB) на скачки эксплуатационных данных, или их резкое изменение, отыскиваются упомянутые выше координатные пары (XB1, YB1, XB2, YB2), из них выводится их смещение (V1) в направлении движения, производится экстраполяция соответствующего смещения (V2) в соседний проход (E3) и постулируется, расположение границы плодородия (G1). Если комбайн приблизился к этой границе до прогона S (EZ1, V1), который необходимо пройти в течение временной константы регулировки машины (EZ1) при скорости движения (V1), то уставки и предельные эксплуатационные данные задаются по историческим режимным параметрам, которые действительны за границей плодородия (G1), а не возле нее, при условии, что новая регулировка позади границы плодородия (G1) обеспечивает повышенную безопасность от перегрузки и/или повреждения машины. Таким образом целевые координаты (XK1, YK1), обеспечивающие завершение перенастройки, приходятся на предполагаемую точку пересечения границ. Когда повышенным риском является перегрузка в зоне урожая, покидаемого комбайном, то перенастройка производится только при достижении границы плодородия.
Фиг. 5 иллюстрирует посредством маршрута движения (S) взаимосвязи между разными местоположениями машины и зависимостями от важных временных величин. В разделе 1 показаны величины, характеризующие густоту (В) хлебного злака на протяжении проходки и за пределами границы плодородия (G1), а также сигнал (EM) заверенного количества урожая, полученный комбайном. Место с координатой (KS) положения проходки, в котором был отмечен скачок сигнала замера вследствие резкого изменения плодородия, располагается вокруг участка S (DT, V1), образуемого временной константой (DT) прохождения зернами через комбайн и фактической скоростью движения (G1), имеющей подлинные координаты (KSW). Поэтому запись в память замеренной величины производится в соотнесении с подлинной координатой (KSW).
На участке II представлен анализ скачка количества урожая, запись которого в память выполнена при подлинной координате (KSW), а именно с учетом регулировки скорости движения комбайна, которая постоянно сообщается и отображается как фактическая скорость (V1). Для того, чтобы фактическая скорость (V1) при достижении комбайном границы плодородия (G1) снизилась настолько, чтобы в связи с поступлением в него большего количества зерна предупредить забивку комбайна, изменение скорости уже предусмотрено при достижении перенесенной координаты (SS1), эта координата была перенесена на границу плодородия на расстояние S (BZ1, V1) перед целевым местом (KS1), складывающегося из временной константы установки (EZ1) подлежащей изменению скорости и фактической скорости движения (V1). При этом следует учитывать, что сама скорость меняется во время перенастройки и, следовательно, путь выступает в качестве интеграла.
На участке III снова показана степень густоты (ВВ) злака по границе плодородия (GI), а также фактическая нагрузка на машину (МL1), возникающая при некоторой задержки прохождения, особенно на участке, на котором начинается транспортный путь. Такая задержка (DT*) в сочетании со скоростью движения, (V1) вызывает смещение пути к месту замера с координатой (KS*). На величину такого смещения производится запоминание скачка нагрузки при соотнесении с действительными координатами (KSW).
На участке IV показана установка высоты срезания (SH), достигаемая за счет того, что на перенесенном координатном месте (SS1*) производится установка высоты срезания, которая при использовании временной константы установки (EZ1*) и скорости движения (V1) завершается лишь тогда, когда достигается граница плодородия с густотой злака.
Поэтому временные константы должны быть учтены до границы плодородия, поскольку при прохождении по расположенному за этой границей участку с более густо произрастающей культурой уже необходимо проводить новую регулировку машины с тем, чтобы обеспечить повышенную безопасность от перегрузки или повреждения режущего аппарата косилки. На нижних участках V-VIII фиг. показано пересечение границы плодородия (G2), при котором отмечается резкое снижение урожайности (EM) и уменьшение нагрузки (ML1). И здесь необходимо учитывать до момента поступления сигналов замера (ЕМ, ML1) время прохождения (DT, DT*) скошенной массы и зерна, а также пройденный при этом путь S (DT, V1), (SDT*, V1) с тем, чтобы записать в память замеренные данные с действительными координатами положения (KSW).
При последующем использовании таких данных соответствующее перепрограммирование уставок будет производиться на месте прохождения границы плодородия (SS2, SS2*) с тем, чтобы на участке с густой культурой не произошло увеличения скорости и снижения высоты срезания, за счет чего предупреждается перегрузка и повреждение режущего аппарата косилки. Перепрограммирование скорости (V1) и высоты срезания (SH) производится с использованием соответствующих временных констант (EZ1, EZ1*), что не вызывает критики, поскольку эксплуатация в условиях менее густой культуры безопасна.
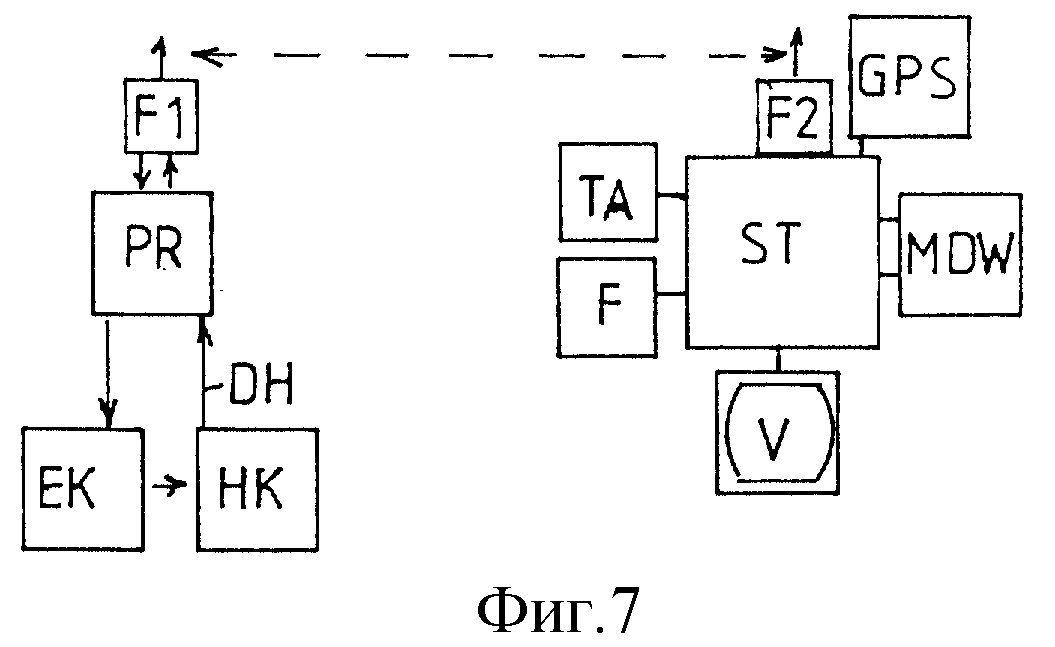
На фиг. 6 изображена блок-схема управляющего устройства (ST). Питание последнего производится от локатора (GPS) с координатами (X,Y) и от часов (CL) с показанием времени. Управляющее устройство (ST) подает задаваемые рабочие сигналы (VS, SBS, SHS). На механизм комбайна (MDW), который в свою очередь получает действительные сигналы (МL1, V1, SB1, SH1, S1, EM1, EV1). Кроме того, с помощью клавиатуры (TA) и рычага регулировки подачи топлива (F) оператор подает рабочие сигналы управления на управляющее устройство (ST). В этом устройстве хранятся в памяти многочисленные режимные параметры, в первую очередь временные константы установки (EZ1, EZ1*) и показатели времени проезда (DT, DT*). На основании данных о действительных координатах (XW, YW) управляющее устройство определяет режимные параметры (EM, EV), в первую очередь специальные данные о результатах замера урожайности и данные о потерях, которые вносятся в кадастр уровня (EK) с указанием действительных координат. При повторном использовании этих данных последние будут находиться в кадастре исторических данных (HK и будут переданы вместе с поисковыми координатами, в виде исторических данных (DH) в управляющее устройство для дополнительной обработки. Согласно изложенному выше на их основе выводятся задаваемые эксплуатационные данные для достижения оптимального режима работы и передаются либо непосредственно на молотильный механизм (MDW), либо в визуальной форме отображаются на экране (V) оператора.
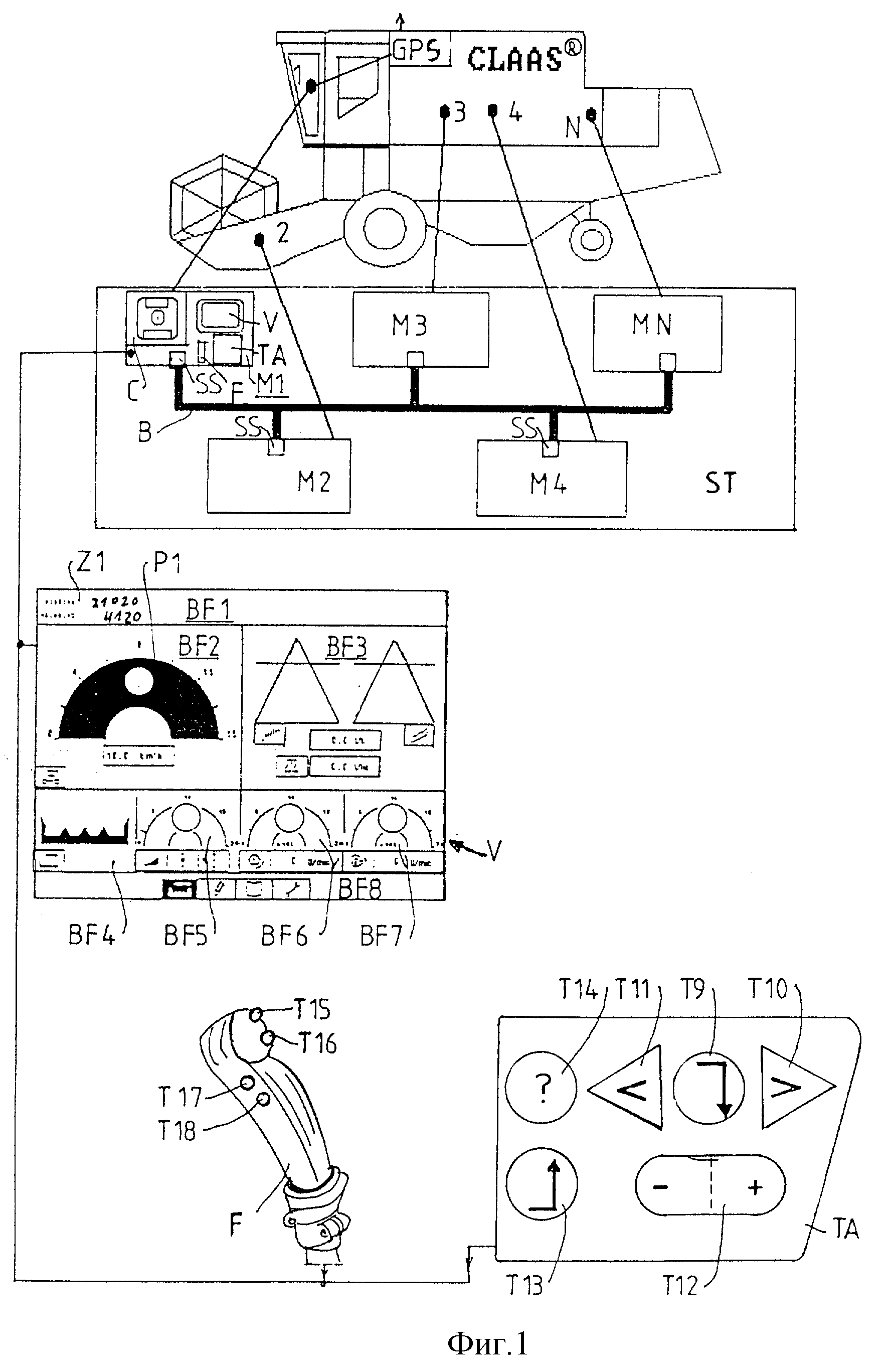
На фиг. 7 представлен вариант устройства, в котором подфункции выполняются отдельным, преимущественно стационарным процессором (PR), обслуживающим память кадастра (EK), а исторические данные (DH) передаются через тракт (F1, F2) радиосвязи управляющего устройства (ST) комбайна. Последний в свою очередь передает текущие режимные параметры и полученные от локатора (GPS) сведения о координатах по тракту (F1, F2) радиосвязи процессору (PR). Такая система имеет то преимущество, что от одной кадастровой станции могут совместно работать несколько комбайнов, используя радиосвязь, и, следовательно, несколько комбайнов могут работать непосредственно с данными, полученными на опережающем комбайне, ведущем жатву на соседнем участке.
Разумеется устройство, содержащее в себе кадастровые запоминающие устройства, может быть установлено и на одном каком-нибудь комбайне, доступ к которому с других комбайнов обеспечивается по радиосвязи.
Реферат
В процессе эксплуатации комбайна последний извне постоянно управляется оператором посредством управляющего процессора с использованием задаваемых и/или предельных эксплуатационных данных и который при постоянных замере и обработке фактических эксплуатационных данных, в частности данных режима езды, внутренне регулируется. При этом постоянно регистрируются абсолютные и/или относительные координаты положения комбайна, с которыми соотносят данные о замерах удельной урожайности, которые преимущественно в виде кадастра данных об урожайности в целях использования в качестве исторического кадастра данных записываются в память. Управляющий процессор комбайна может обращаться к историческому кадастру данных, адресует их вместе с координатами положения комбайна и в сочетании с его данными режима езды корректирует хранящиеся в нем исторические данные, предвосхищая текущие координаты, считывает и определяет новые задаваемые или предельные эксплуатационные данные и заново их перезадает. Это позволяет оптимизировать работу комбайна, снизить потери урожая и исключить случаи его перегрузки и повреждения. 2 с. и 4 з.п. ф-лы, 7 ил.
Комментарии