Устройство визуализации - RU2620648C2
Код документа: RU2620648C2
Чертежи
Описание
Область техники, к которой относится изобретение
Изобретение относится к устройству для визуализации процессов управления сельскохозяйственной рабочей машиной в соответствии с ограничительной частью пункта 1 формулы изобретения.
Уровень техники
Из патентного документа ЕР 0820688 известно устройство управления исполнительными органами рабочего транспортного средства, в котором водитель рабочего транспортного средства может свободно программировать алгоритм управления транспортным средством и активизировать запрограммированный алгоритм управления путем привода в действие операторской кнопки. Такие системы имеют то преимущество, что могут быть автоматизированы сложные процессы управления, так что водитель рабочей машины освобожден от управления трудоемкими процессами. Такие автоматизированные программы управления используются прежде всего при движении сельскохозяйственных рабочих машин в так называемых поворотных областях на краях подлежащей обработке территории. Как правило, при выезде из подлежащей обработке территории должна быть снижена скорость движения, затем рабочие органы должны быть отключены, а рабочие аппараты подняты. После поворота сельскохозяйственной рабочей машины в поворотной области действия должны быть выполнены в обратном порядке, то есть рабочий аппарат должен быть опущен, рабочие органы подсоединены к приводу, а скорость движения снова повышена. Эти в целом очень сложные процессы управления поддаются удобной автоматизации с помощью свободно программируемых алгоритмов управления. Для того, чтобы водитель сельскохозяйственной рабочей машины был информирован о том, какие процессы управления содержит установленный алгоритм управления, предусмотрено выполненное в виде жидкокристаллического дисплея устройство отображения для визуализации активизированных процессов управления. Системы отображения данного типа достаточны, прежде всего, для сельскохозяйственных рабочих машин, в которых рулевое управление осуществляется водителем, поскольку в этих случаях водитель непосредственно включен в процесс управления транспортным средством.
Системы визуализации указанного типа сталкиваются с ограничениями, когда сельскохозяйственная рабочая машина автоматически обрабатывает заданные маршруты движения. В этих случаях водитель транспортного средства уже не включен непосредственно в процесс управления и может только в ограниченной степени представлять себе, соответствуют ли процессы управления активизированного алгоритма управления мгновенному положению транспортного средства. Для оказания ему помощи в патентном документе ЕР 2020170, помимо прочего, предложено устройство отображения, которое визуализирует процессы управления предварительно запрограммированного алгоритма управления, так что водитель сельскохозяйственной рабочей машины информируется о подлежащих выполнению (обработке) процессах управления. Помимо ограниченного удобства для оператора такие системы имеют тот недостаток, что в них отсутствует непосредственная связь между выполняемыми процессами управления и мгновенным положением сельскохозяйственного транспортного средства на подлежащей обработке территории.
Раскрытие изобретения
Соответственно, задачей изобретения является устранение описанных недостатков уровня техники и создание устройства, которое устанавливает непосредственную связь между положением сельскохозяйственного транспортного средства на подлежащей обработке территории и конкретным подлежащим обработке процессом управления, так что даже оператор, не включенный непосредственно в процесс управления сельскохозяйственной рабочей машиной, постоянно информируется о текущих процессах управления.
В соответствии с изобретением решение поставленной задачи достигается за счет отличительных признаков пункта 1 формулы изобретения.
Благодаря тому, что устройство для визуализации процессов управления сельскохозяйственной рабочей машиной содержит предназначенный для сельскохозяйственной рабочей машины блок визуализации, который визуализирует по меньшей мере один маршрут движения, подлежащий прохождению сельскохозяйственной рабочей машиной, а процессы управления записаны в виде графических изображений, при этом графические изображения отображаются в блоке визуализации вдоль подлежащего прохождению маршрута движения в порядке очередности их обработки (выполнения), даже не включенный непосредственно в процесс управления сельскохозяйственной рабочей машиной оператор постоянно информируется о текущих процессах управления.
В выгодном примере осуществления изобретения предусмотрено, что подлежащий прохождению маршрут движения образован траекторией поворота сельскохозяйственной рабочей машины в поворотной области подлежащей обработке территории, причем траектория поворота предпочтительно содержит выходящий из подлежащей обработке территории участок маршрута, поворотный участок и ведущий на подлежащую обработке участок маршрута. Преимущество решения состоит в том, что при движении сельскохозяйственной рабочей машины в так называемой поворотной области на краю поля текущие в этом время процессы управления могут быть очень наглядно представлены в блоке визуализации.
Очень гибкое использование сельскохозяйственной рабочей машины достигается в следующем предпочтительном примере осуществления изобретения, в котором множество процессов управления образуют алгоритм управления.
Для того чтобы оператор сельскохозяйственной рабочей машины мог точно и быстро понимать, какой процесс управления активизирован в данный момент, в следующем предпочтительном примере выполнения предусмотрено, что каждый процесс управления алгоритма управления визуализирован посредством иконки, содержащей изобразительные и/или текстовые элементы.
В следующем предпочтительном примере выполнения предусмотрено, что отображение представляющей процесс управления иконки опережает обработку соответствующего процесса управления, так что оператор сельскохозяйственной рабочей машины может, например, прервать или задержать обработку следующего процесса управления, если внешние условия делают это необходимым.
За счет того, что представляющая выполненный процесс управления иконка остается видимой в устройстве визуализации при обработке последующих процессов управления, оператор сельскохозяйственной рабочей машины постоянно имеет в распоряжении полный обзор подлежащего обработке алгоритма управления.
В следующем предпочтительном примере выполнения предусмотрено, что при активизации алгоритма управления все процессы управления этого алгоритма управления отображаются путем визуализации соответствующей иконки, а иконка текущего подлежащего обработке процесса управления выделяется перед обработкой соответствующего процесса управления. Это создает тот особенный эффект, что оператор быстро, почти с одного взгляда, может понять, какой именно процесс управления сейчас активизирован и какой будет активизирован следующим. Этот эффект поддерживается еще и тем, что выделение обеспечивается миганием или цветным обрамлением соответствующей иконки.
В высшей степени гибкое и универсальное использование устройства визуализации по изобретению достигается, прежде всего, за счет того, что сельскохозяйственная рабочая машина выполнена в виде тягового транспортного средства по меньшей мере с одним агрегатированным с ним рабочим аппаратом или в виде сельскохозяйственной уборочной машины с навесным уборочным агрегатом, а образующие алгоритм управления процессы управления обеспечивают перевод рабочего аппарата или уборочного агрегата в нерабочее положение при выезде из подлежащей обработке территории и перевод рабочего аппарата или уборочного агрегата в рабочее положение при въезде на подлежащую обработке территорию. Таким путем обеспечивается возможность использования принципа визуализации по изобретению независимо от вида машины.
Известным образом подлежащий обработке алгоритм управления может быть выполнен свободно программируемым, причем возможность свободного программирования алгоритма управления оператором обеспечивается путем воздействия на операторские кнопки, запускающие соответствующий процесс управления, и/или путем редактирования на блоке визуализации. Особенно удобная для оператора возможность программирования алгоритма управления достигается в предпочтительном решении по развитию изобретения в том случае, когда блок визуализации содержит монитор с сенсорным экраном, содержащий поле меню, в котором записаны иконки, представляющие возможные процессы управления, причем программирование алгоритма управления осуществляется путем перемещения (перетягивания) соответствующих иконок на визуализированный подлежащий прохождению маршрут движения.
Значительное освобождение оператора сельскохозяйственной рабочей машины от нагрузки достигается также тогда, когда в следующем предпочтительном примере выполнения изобретения для сельскохозяйственной рабочей машины в блоке визуализации предусмотрены по меньшей мере частично визуализированный план маршрутизации и по меньшей мере одна система вождения по колее таким образом, что сельскохозяйственная рабочая машина автоматически следует по заданным и записанным в плане маршрутизации маршрутам движения. Этот эффект может создаваться также за счет того, что план маршрутизации содержит также заданные участки маршрута в поворотной области, система вождения по колее автоматически направляет сельскохозяйственную рабочую машину вдоль этих участков маршрута, а сельскохозяйственная рабочая машина автоматически обрабатывает предварительно запрограммированный алгоритм управления, содержащий выбранные процессы управления.
Известным образом предназначенная для сельскохозяйственной рабочей машины система вождения по колее может работать на основе глобальной системы навигации и определения положения (GPS) и/или являться системой на основе камеры и/или системой на основе датчиков. При этом надежная зарекомендовавшая себя технология автоматического вождения сельскохозяйственных рабочих машин комбинируется с технологией визуализации, которая в значительной мере освобождает оператора сельскохозяйственной рабочей машины от непосредственного процесса управления машиной в поворотной области, так что при движении в поворотной области на краю поля оператор может больше внимания уделять условиям окружения. Это значительно снижает риск происшествий и столкновений.
Другие имеющие преимущества решения являются предметом защиты в зависимых пунктах формулы изобретения и будут описаны на примерах осуществления со ссылками на прилагаемые чертежи.
Краткий перечень чертежей
На чертежах:
фиг.1 схематично изображает управление процессами в поворотной области при выезде сельскохозяйственной рабочей машины из подлежащей обработке территории,
фиг.2 схематично изображает управление процессами в поворотной области при въезде сельскохозяйственной рабочей машины на подлежащую обработке территорию,
фиг.3 схематично изображает устройство визуализации по изобретению,
фиг.4 изображает более подробно устройство визуализации по изобретению.
Осуществление изобретения
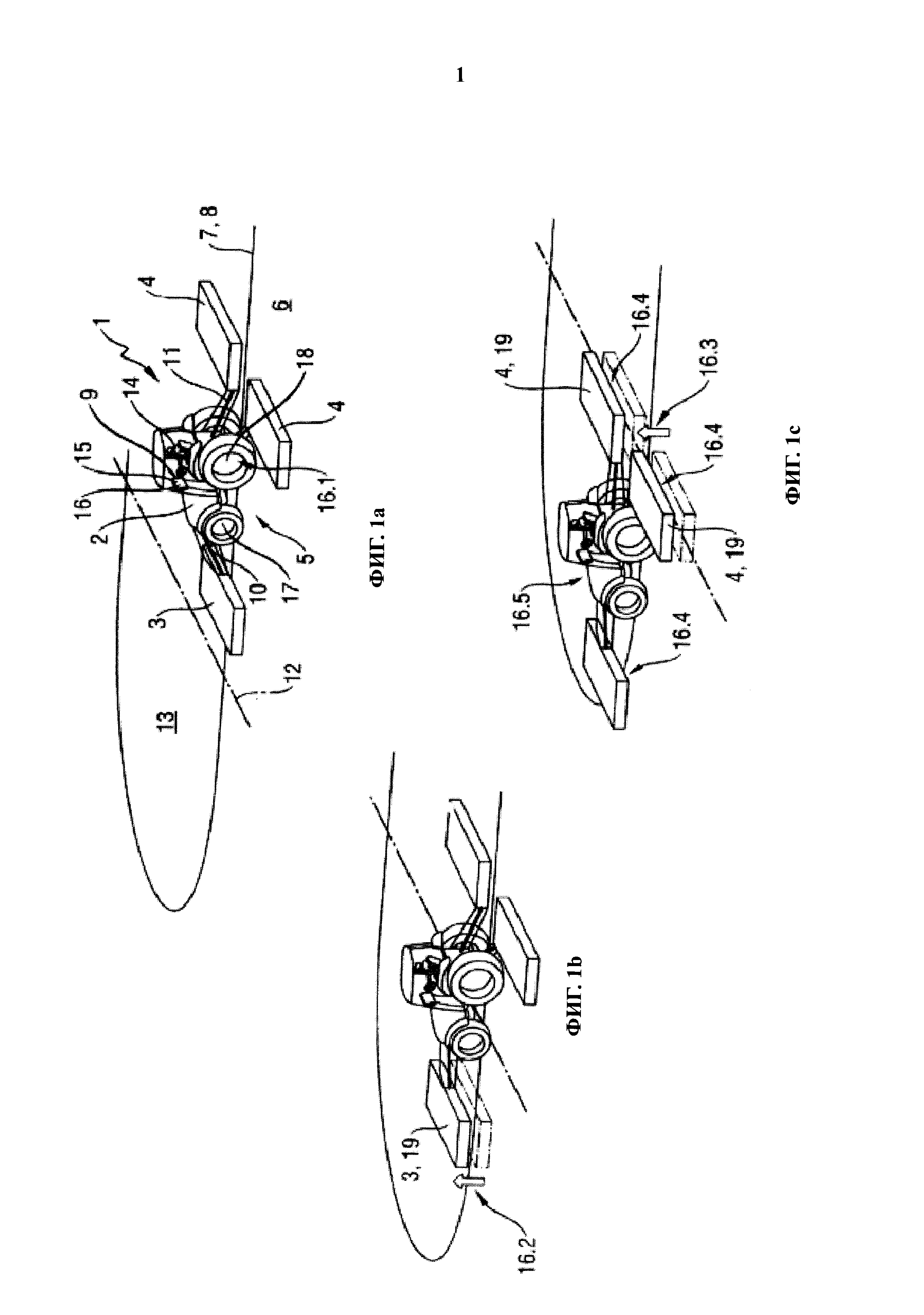
На фиг.1а-1с схематично показан процесс управления 1 в поворотной области на краю поля сельскохозяйственной рабочей машиной 5, выполненной в качестве примера в виде комбинации трактора 2 с косилками 3, 4. Сельскохозяйственная рабочая машина 5 движется на подлежащей обработке территории 6, на поле, вдоль заданных маршрутов 7 движения, причем подлежащие прохождению маршруты 7 движения записаны в плане 8 маршрутизации, который будет подробно описан дальше, в устройстве 9 управления и регулирования, предусмотренном в тракторе 2. В показанном примере осуществления известным образом от переднего и заднего валов 10, 11 отбора мощности трактора 2 приводятся передняя косилка 3 и задняя косилка 4. Когда трактор 2 приближается к пограничной линии 12, которая отделяет подлежащую обработке территорию 6 от так называемой поворотной области 13, процесс управления 1 на краю поля активизируется автоматически или запускается оператором 14 сельскохозяйственной рабочей машины 5.
В показанном примере осуществления перед достижением пограничной линии 12 активизируется записанный в устройстве 9 управления и регулирования алгоритм 15 управления, который известным образом запускает один или несколько процессов 16 управления в зависимости от времени, пройденного пути или достигнутого результата. Так, например, первый процесс 16.1 управления может вызывать отключение блокировки дифференциала на одной или нескольких ходовых осях 17, 18, так что при необходимых изменениях направления движения в поворотной области 13 на краю поля транспортное средство лучше управляется по углу поворота.
Когда приводимая от переднего вала 10 отбора мощности косилка 3 доходит до пограничной линии 12, запускается следующий процесс 16.2 управления, который обеспечивает поворот передней косилки 3 в вертикальном направлении в нерабочее положение 19 (фиг.1b).
Как показано на фиг.1с, следующий процесс 16.3 управления запускается, когда установленная сзади косилка 4 дошла до пограничной линии 12, причем активизация этого процесса 16.3 управления вызывает подъем задней косилки 4 в нерабочее положение 19. В зависимости от структуры алгоритма 15 управления может быть предусмотрен следующий процесс 16.4 управления, который вызывает отключение переднего и заднего валов 10, 11 отбора мощности, так что косилки 3, 4 отключаются перед поворотом сельскохозяйственной рабочей машины 5. В ходе следующего процесса 16.5 управления далее скорость движения сельскохозяйственной рабочей машины 5 может регулироваться в соответствии с движением в поворотной области 13, причем это может быть как снижение, так и повышение скорости движения.
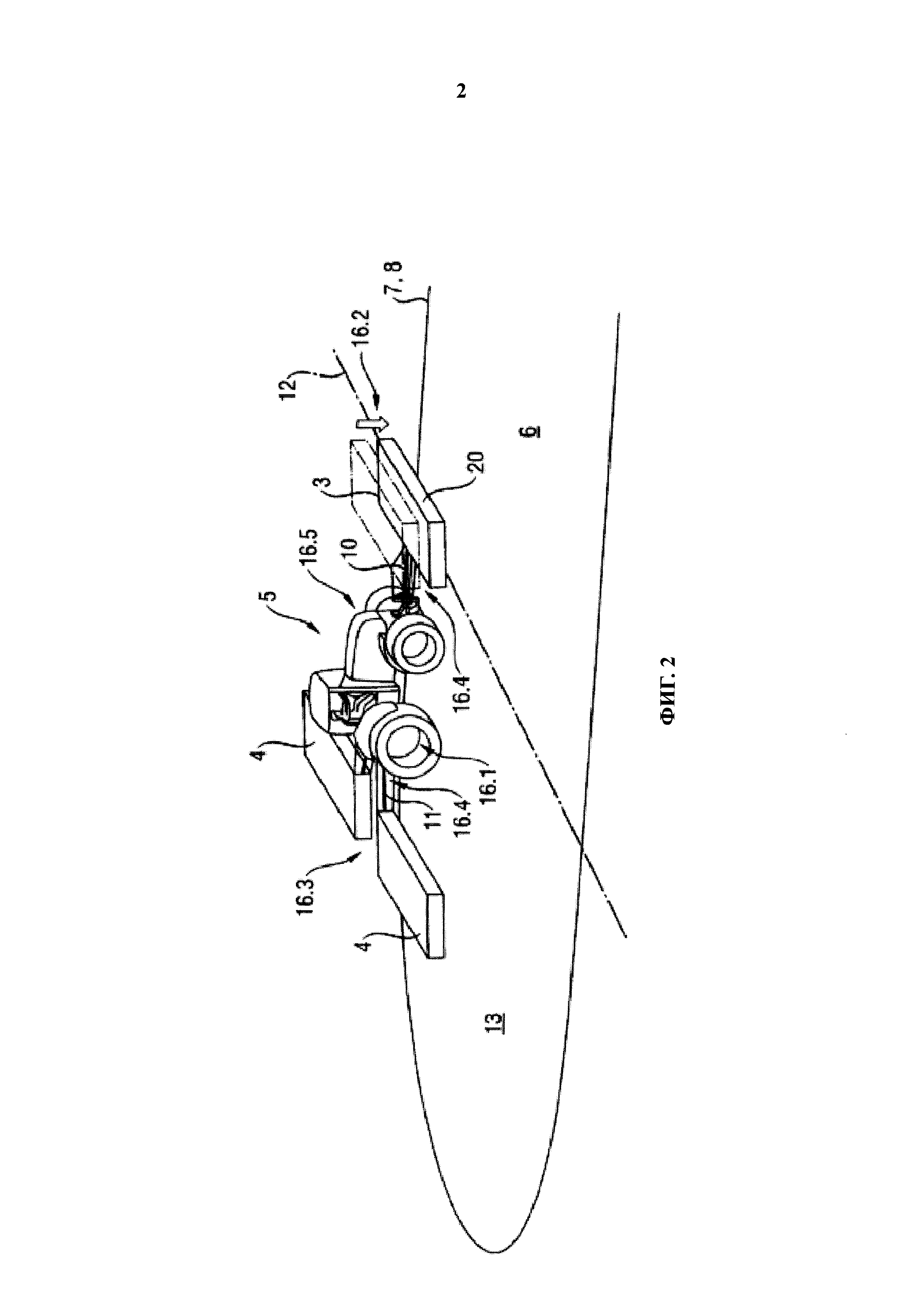
Когда сельскохозяйственная рабочая машина 5 наконец проходит поворотную область 13, как это показано на фиг.2, и движется вдоль предварительно заданного маршрута 8 от пограничной линии 12, отделяющей поворотную область 13 от подлежащей обработке территории 6, активизированные до того процессы 16.1-16.5 управления вновь выполняются в другом порядке, причем вначале регулируется скорость движения сельскохозяйственной рабочей машины (процесс 16.5 управления). Затем подключаются передний и задний валы 10, 11 отбора мощности (процесс 16.4 управления), а передняя косилка 3 вновь опускается в рабочее положение 20 до достижения пограничной линии 12 (процесс 16.2 управления). Когда в заключение задняя косилка 4 доходит до пограничной линии 12, она также вновь опускается в не показанное рабочее положение 20 (процесс 16.3 управления). В заключение, когда все косилки 3, 4 находятся снова в рабочем положении 20 и сельскохозяйственная рабочая машина 5 снова движется по намеченному маршруту 7 движения, определенному планом 8 маршрутизации, снова активизируется блокировка дифференциалов (процесс 16.1 управления).
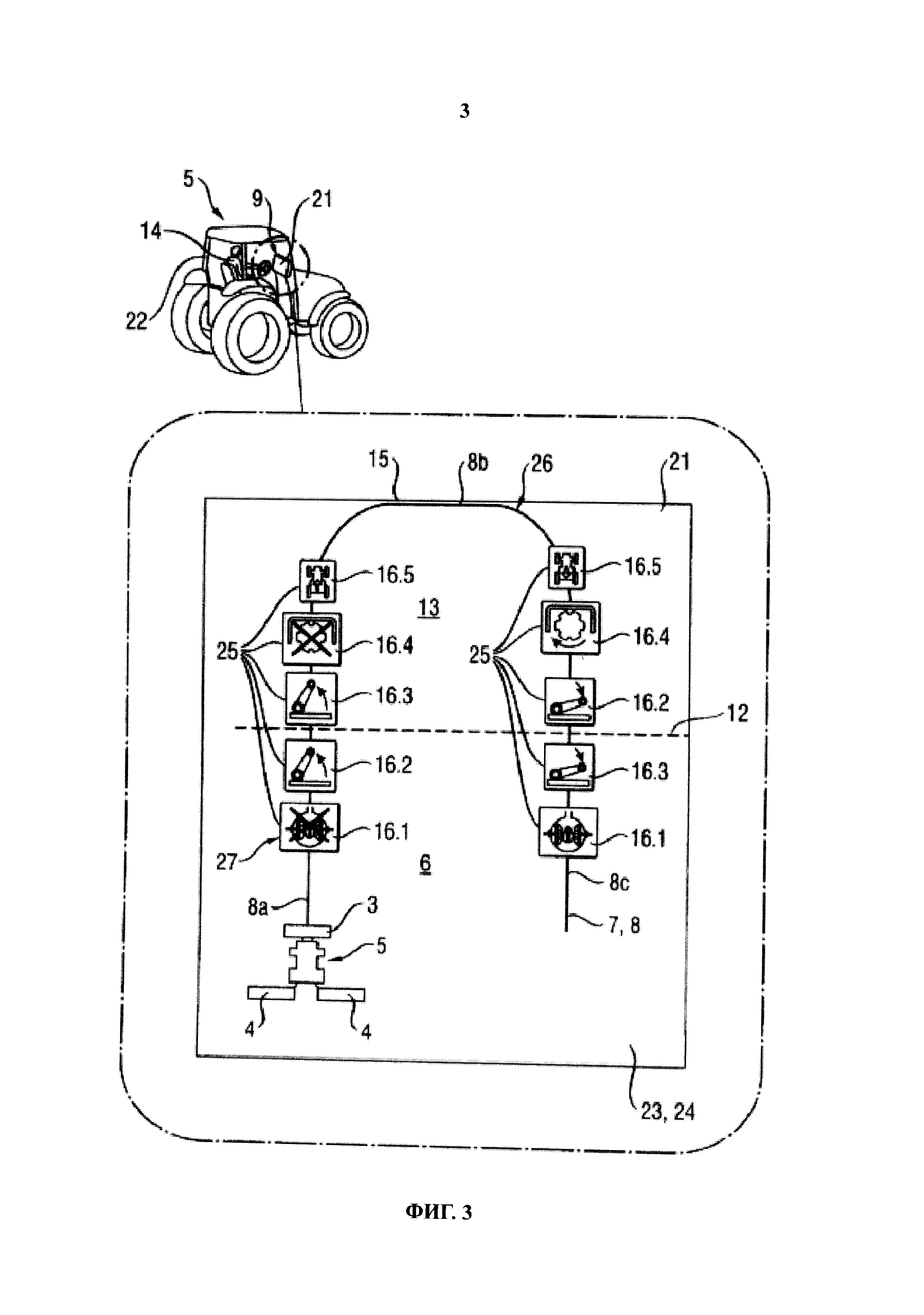
Как показано на фиг.3, для того, чтобы водитель 14 сельскохозяйственной рабочей машины 5 был точно осведомлен об обработке (выполнении) выбранного алгоритма 15 управления, сельскохозяйственная рабочая машина 5 оснащена блоком 21 визуализации по изобретению, которое может быть либо составной частью уже описанного устройства 9 управления и регулирования, либо может быть расположено отдельно в кабине 22 водителя машины. Блок 21 визуализации по изобретению снабжен дисплеем 23, предпочтительно выполненным в виде дисплея 23 монитора 24 с сенсорным экраном. На дисплее 23 отображены по меньшей мере частично, а в определенных случаях полностью, подлежащая обработке территория 6 и поворотная область 13. Далее, отображены сельскохозяйственная рабочая машина 5, здесь - комплекс трактора 2 и косилок 3, 4, а также заданные маршруты 7 движения. В рамках изобретения возможен вариант осуществления, в котором положение визуально отображаемой сельскохозяйственной рабочей машины 5 определяется с помощью известной и здесь подробно не описываемой системы GPS (от Global Positioning System - глобальная система навигации и определения положения), а заданные маршруты 7 движения взяты из предварительно запрограммированного плана 8 маршрутизации. Кроме того, в соответствии с изобретением на дисплее 23 блока 21 визуализации визуально представлены процессы 16.1-16.5 управления, подлежащие выполнению сельскохозяйственной рабочей машиной 5. При этом процессы 16.1-16.5 управления представлены графическими изображениями 25, которые непосредственно привязаны к заданному маршруту 7 движения сельскохозяйственной рабочей машины 5 и обозначены позициями в порядке очередности обработки.
По аналогии с показанным на фиг.1 и 2 управлением 1 в поворотной области визуально представленный на дисплее 23 маршрут 7 движения образует так называемую траекторию 26 поворота, которая состоит из исходящего из подлежащей обработке территории 6 участка 8а маршрута, поворотного участка 8b и ведущего на подлежащую обработке территорию 6 участка 8 с маршрута. Согласно показанному примеру осуществления, который здесь описан только в качестве примера одного из множества алгоритмов 15 управления, зависящих от типа сельскохозяйственной рабочей машины 5 и конфигурации заданного маршрута 7 движения, алгоритм 15 управления состоит из множества визуально представленных на дисплее 23 процессов 16 управления. Для того чтобы оператор 14 сельскохозяйственной рабочей машины 5 мог легко понимать графические изображения 25, представляющие соответствующие процессы 16.1-16.5 управления, графические изображения 25 выполнены в виде пиктограмм или иконок 27, содержащих изобразительные и/или текстовые элементы, причем в показанном примере осуществления по фиг, 3 словесные элементы не использованы. Кроме того, иконки 27 последовательно соотнесены к заданному маршруту 7 движения для поочередной обработки представленных ими процессов 16 управления. Другими словами, соответствующая иконка соответствует географической точке заданного маршрута 7 движения, до которой соответствующий процесс 16.1-16.5 управления еще не был активизирован. В то же время представляющая процесс 16.1-16.5 управления иконка 27 остается видимой даже после обработки соответствующего процесса 16.1-16.5 управления, так что оператор 14 сельскохозяйственной рабочей машины 5 всегда располагает возможностью обзора всего подлежащего обработке алгоритма 15 управления.
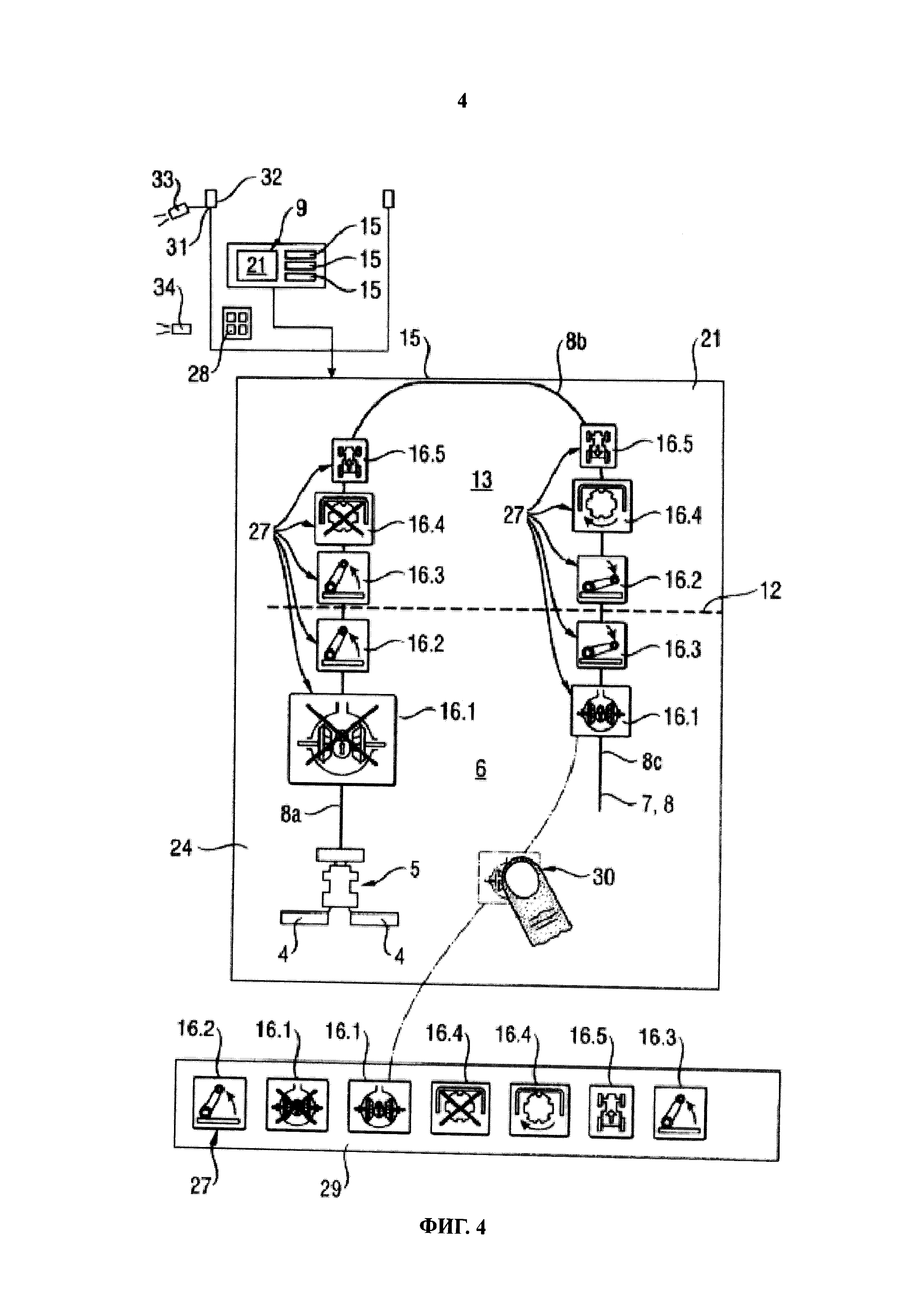
Далее, согласно фиг.4 визуализация процессов 16.1-16.5 управления может быть структурирована таким образом, что при активизации алгоритма 15 управления все процессы 16.1-16.5 управления этого алгоритма 15 управления отображаются посредством визуализации соответствующей иконки 27, а иконка текущего подлежащего обработке процесса 16.1 управления из процессов 16.1-16.5 управления заранее выделяется. В показанном примере осуществления соответствующая иконка 27 отображается в увеличенном виде, при этом в рамках изобретения возможно выделение иконки 27 также посредством мигания или цветного обрамления.
Далее, в рамках изобретения возможно выполнение сельскохозяйственной рабочей машины 5 в виде выполненного любым образом тягового транспортного средства по меньшей мере с одним агрегатированным с ним рабочим аппаратом или в виде сельскохозяйственной уборочной машины со сменным уборочным аппаратом. При этом образующие алгоритм 15 управления процессы 16 управления обеспечивают перевод рабочего оборудования или уборочного аппарата в нерабочее положение 19 при выезде с подлежащей обработке территории 6 и перевод рабочего оборудования или уборочного аппарата в рабочее положение 20 при въезде на подлежащую обработке территорию 6.
Кроме того, в рамках изобретения возможно свободное программирование записанных в устройстве 9 управления и регулирования алгоритмов 15 управления, то есть подлежащие выполнению процессы 16 управления алгоритма 15 управления могут свободно выбираться, записываться и вновь вызываться. В простейшем случае возможность свободного программирования алгоритмов 15 управления может осуществляться оператором 14 путем воздействия на операторские кнопки 28, запускающие соответствующий процесс 16 управления, и/или путем редактирования на блоке 21 визуализации. Кроме того, когда блок 21 визуализации выполнен в виде монитора 24 с сенсорным экраном, в котором имеется поле 29 меню, где записаны иконки 27, представляющие различные процессы 16.1-16.5 управления, программирование алгоритма 15 управления может производиться путем того, что соответствующую иконку 27 включают в визуализированный маршрут 7 движения путем перемещения 30 иконки.
Далее, в рамках изобретения для блока 21 визуализации для сельскохозяйственной рабочей машины 5 предусмотрены по меньшей мере частично визуализированный план 8 маршрутизации и по меньшей мере система 31 вождения по колее, так что сельскохозяйственная рабочая машина 5 автоматически следует по маршрутам 7 движения, записанным в плане 8 маршрутизации.
Полностью автономное движение сельскохозяйственной рабочей машины 5 по подлежащей обработке территории 6 и в поворотной области 13 достигается в том случае, когда план 8 маршрутизации содержит также заданные участки 8b движения в поворотной области 13, а система 31 вождения по колее сельскохозяйственной рабочей машины 5 автоматически ведет машину вдоль этих участков 8b движения, и сельскохозяйственная рабочая машина автоматически обрабатывает запрограммированный алгоритм 15 управления, содержащий выбранные процессы 16 управления. Известным и здесь не описываемым образом предназначенная для сельскохозяйственной рабочей машины 5 система 31 вождения по колее может быть выполнена в виде системы 32 вождения по колее на основе GPS (от Global Positioning System - глобальная система навигации и определения положения), в виде системы 33 вождения по колее на основе камеры или в виде системы 34 вождения по колее на основе датчиков, причем здесь могут быть предусмотрены инфракрасные или лазерные датчики, или могут использоваться комбинации этих систем 32-34 вождения по колее.
Перечень условных обозначений
Реферат
Изобретение относится к области сельскохозяйственного машиностроения и может применяться для визуализации процессов управления сельскохозяйственной рабочей машиной. Устройство для визуализации процессов управления размещается на рабочей машине. Устройство для визуализации содержит блок визуализации. Блок визуализирует по меньшей мере один подлежащий прохождению маршрут движения рабочей машины. Процессы управления записаны в виде графических изображений. Графические изображения отображаются в блоке визуализации вдоль подлежащего прохождению маршрута движения. Отображение процессов происходит в порядке очередности их выполнения. Блок визуализации обеспечивает постоянное информирование оператора рабочей машины о выполняемых процессах управления. 15 з.п. ф-лы, 6 ил.
Формула
Документы, цитированные в отчёте о поиске
Способ разработки задающих линий движения для рабочих сельхозмашин
Комментарии