Устройство для манипулирования материнскими рулонами на установках для конвертинга бумаги - RU2676155C2
Код документа: RU2676155C2
Чертежи






Описание
Настоящее изобретение относится к устройству для манипулирования материнскими рулонами в установках для конвертинга бумаги.
Известно, что производство бумажных логов предполагает подачу непрерывного бумажного полотна вдоль заданной траектории. Бумажное полотно перфорируют в поперечном направлении в заданном месте указанной траектории так, чтобы оно было разделено на листы заданной длины, разделяемые путем отрыва. Кроме того, используют трубчатые элементы (обычно называемые сердечниками/втулками/гильзами), на поверхности которых наносят заданное количество клея для обеспечения возможности приклеивания первого листа лога, подлежащего формированию. Кроме того, используют намоточные валики, которые расположены и функционируют на станции формирования логов и которые вызывают вращение сердечника, на который наматывается бумага. Формирование лога заканчивается, когда заданное количество бумаги будет намотано на сердечник. После этого формируют другой лог. Когда формирование лога будет завершено, последний лист лога должен быть приклеен к расположенному под ним листу для избежания самопроизвольного разматывания лога. После этого каждый лог разделяют на множество более коротких рулонов посредством отрезных машин.
Для обеспечения возможности надлежащего выполнения процесса установка для конвертинга бумаги всегда содержит раскат, на котором размещают материнские рулоны, с которых подают бумажное полотно. Кроме того, установка для конвертинга бумаги обычно содержит мостовой кран, посредством которого материнский рулон перемещают из места временного хранения к раскату.
Во время удаления материнского рулона из соответствующего места временного хранения рычаги мостового крана не всегда надлежащим образом выравниваются относительно сердечника рулона, то есть концы указанных рычагов находятся выше или ниже оси рулона.
Основная задача настоящего изобретения состоит в избежании вышеупомянутого недостатка.
Данный результат достигается в соответствии с настоящим изобретением посредством разработки устройства, имеющего признаки, указанные в пункте 1 формулы изобретения. Другие признаки настоящего изобретения являются предметом зависимых пунктов формулы изобретения.
Производственная система в соответствии с настоящим изобретением всегда обеспечивает возможность надлежащего выравнивания оси материнского рулона, подлежащего удалению, относительно концов рычагов, с которыми предусмотрен мостовой кран, каким бы ни был диаметр материнского рулона. Кроме того, система в соответствии с настоящим изобретением может быть легко реализована в существующих установках для конвертинга бумаги и не является дорогой по отношению к обеспечиваемым преимуществам.
Эти и другие преимущества и признаки данного изобретения будут наилучшим образом поняты любым специалистом в данной области техники благодаря нижеприведенному описанию и приложенным чертежам, которые представлены в качестве примера, но не должны рассматриваться в ограничивающем смысле, в которых:
- фиг.1 схематически показывает вид сбоку мостового крана с концами соответствующих рычагов, выровненными надлежащим образом относительно продольной оси материнского рулона, размещенного на опоре;
- фиг.2А и 2В показывают группу по фиг.1 на виде спереди в двух разных конфигурациях;
- фиг.3 представляет собой схематический вид сбоку мостового крана с концами соответствующих рычагов, расположенными выше продольной оси материнского рулона;
- фиг.4 показывает группу по фиг.3 на виде спереди;
- фиг.5 представляет собой схематический вид сбоку мостового крана с концами соответствующих рычагов, расположенными ниже продольной оси материнского рулона;
- фиг.6 показывает группу по фиг.5 на виде спереди;
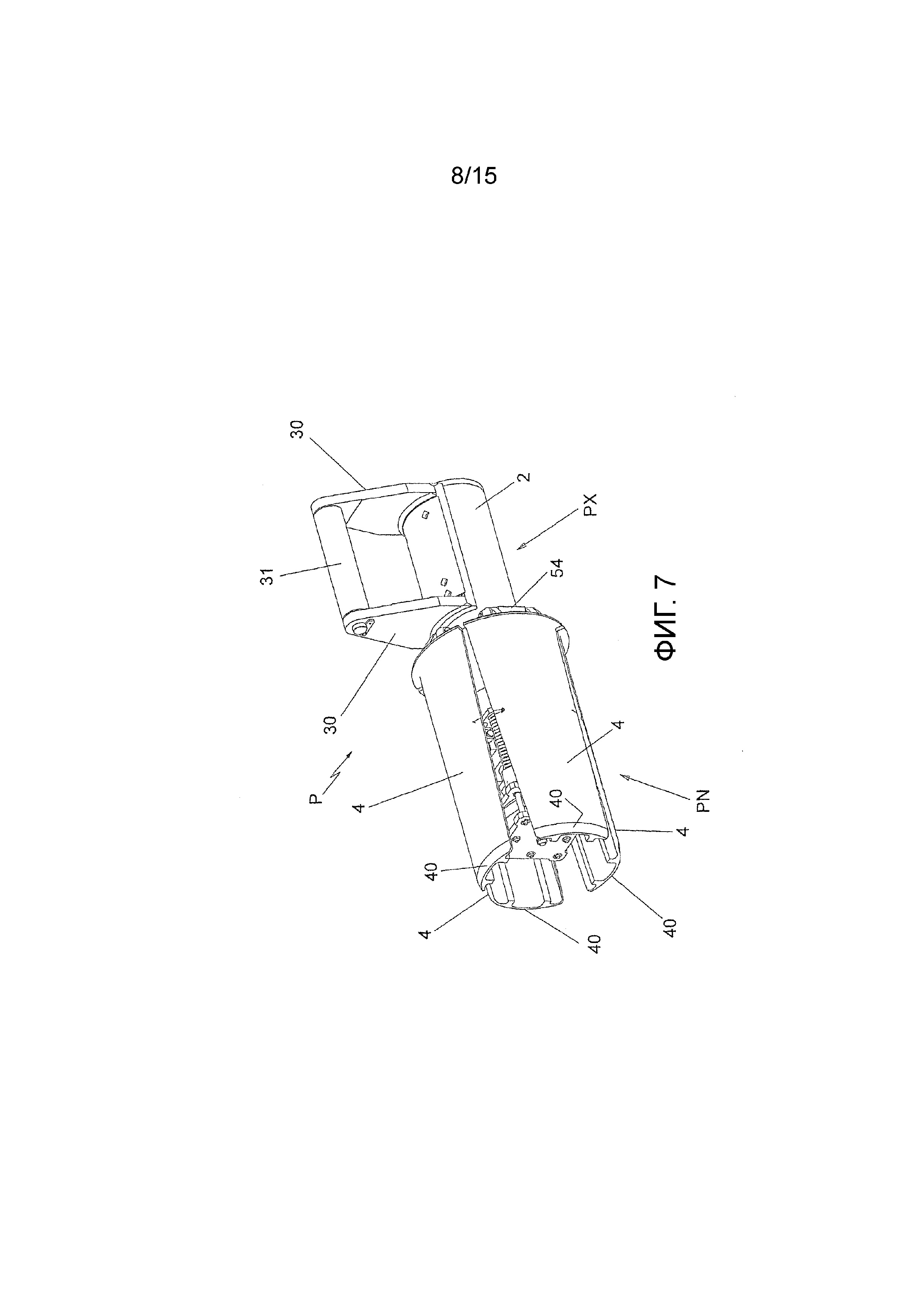
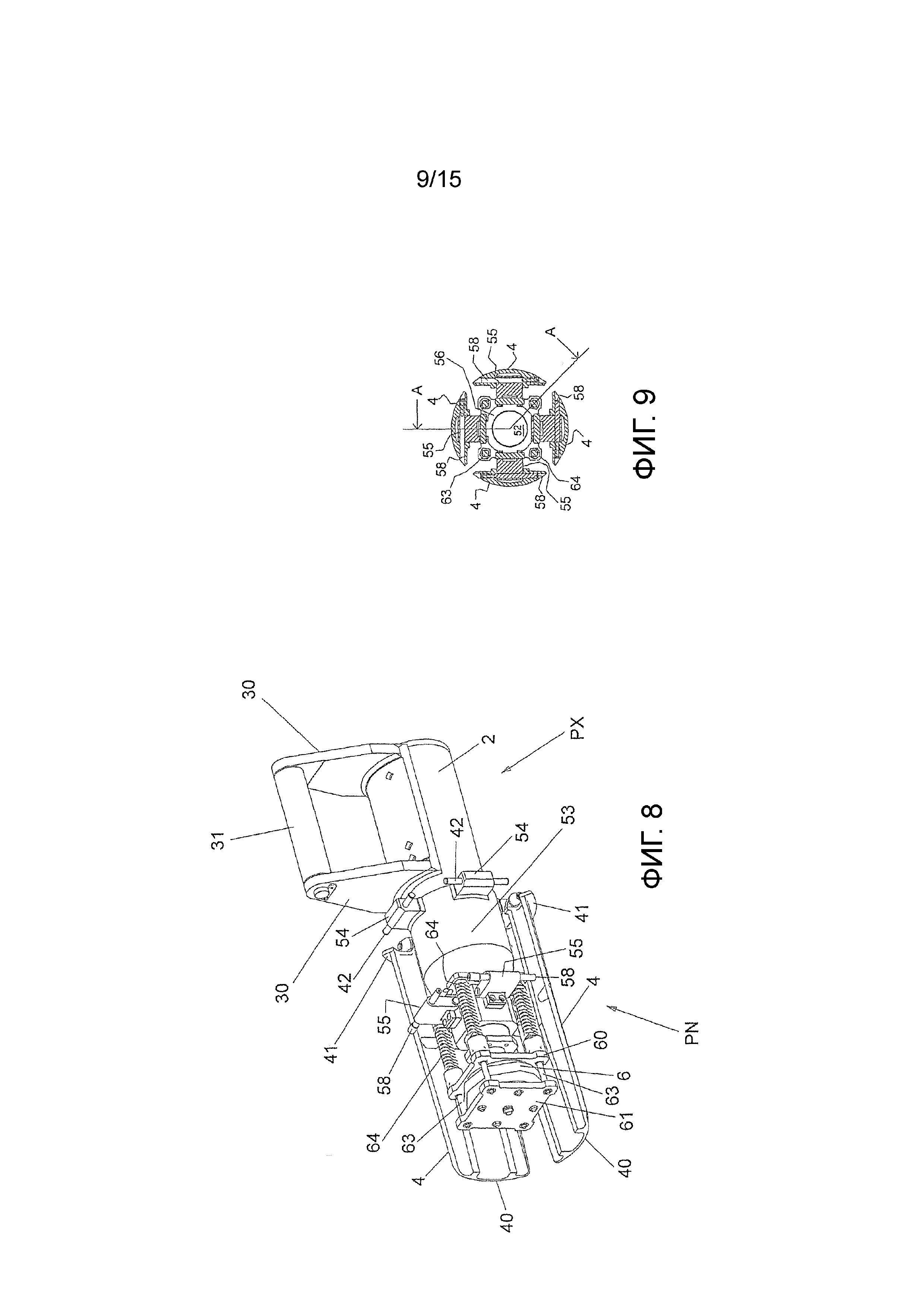
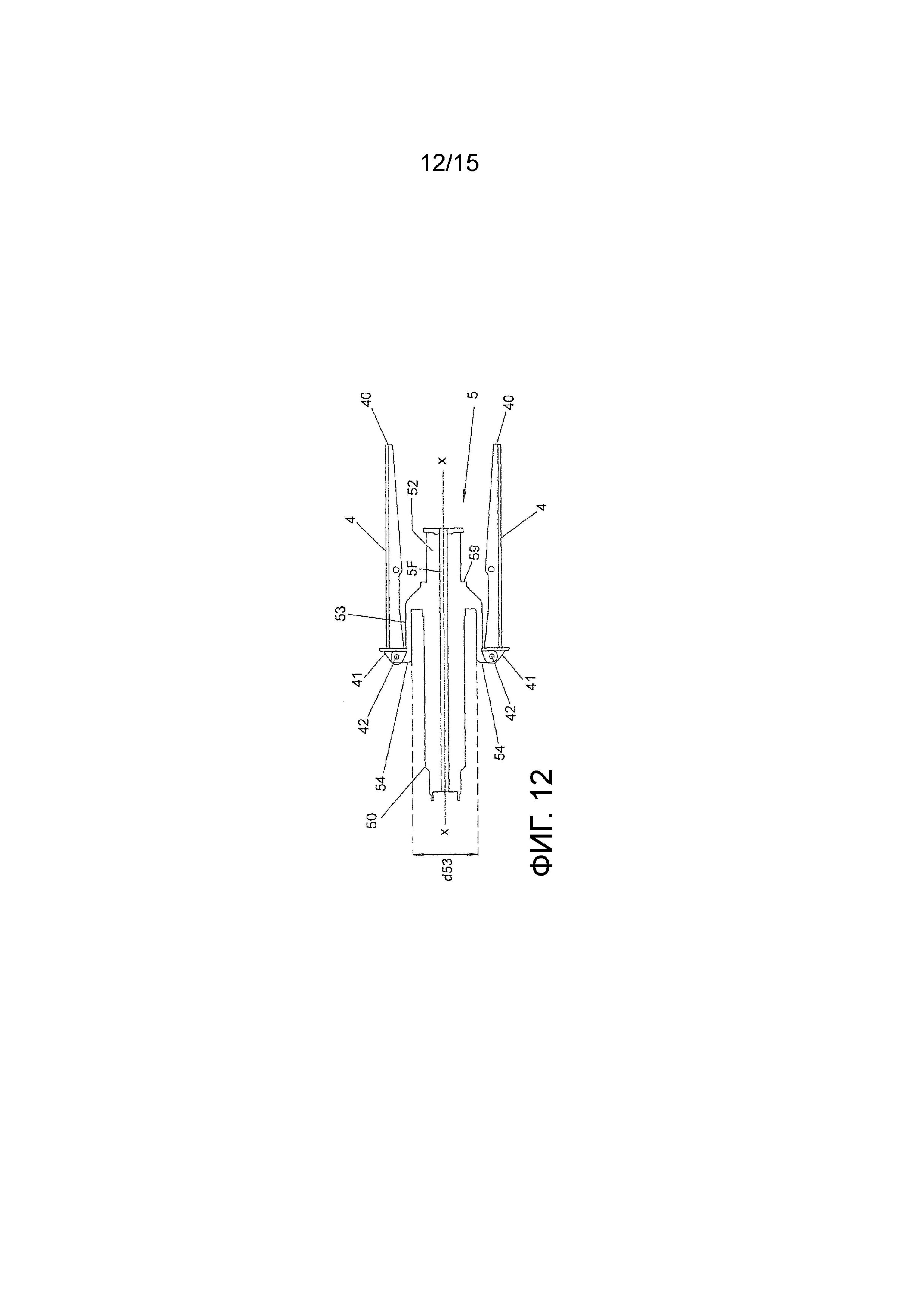
- фиг.7-12 показывают несколько видов фиксатора (Р), который может быть вставлен в сердечник материнского рулона, при этом, в частности, фиг.9 представляет собой поперечное сечение фиксатора (Р), и фиг.10 представляет собой разрез, выполненный по линии А-А на фиг.9;
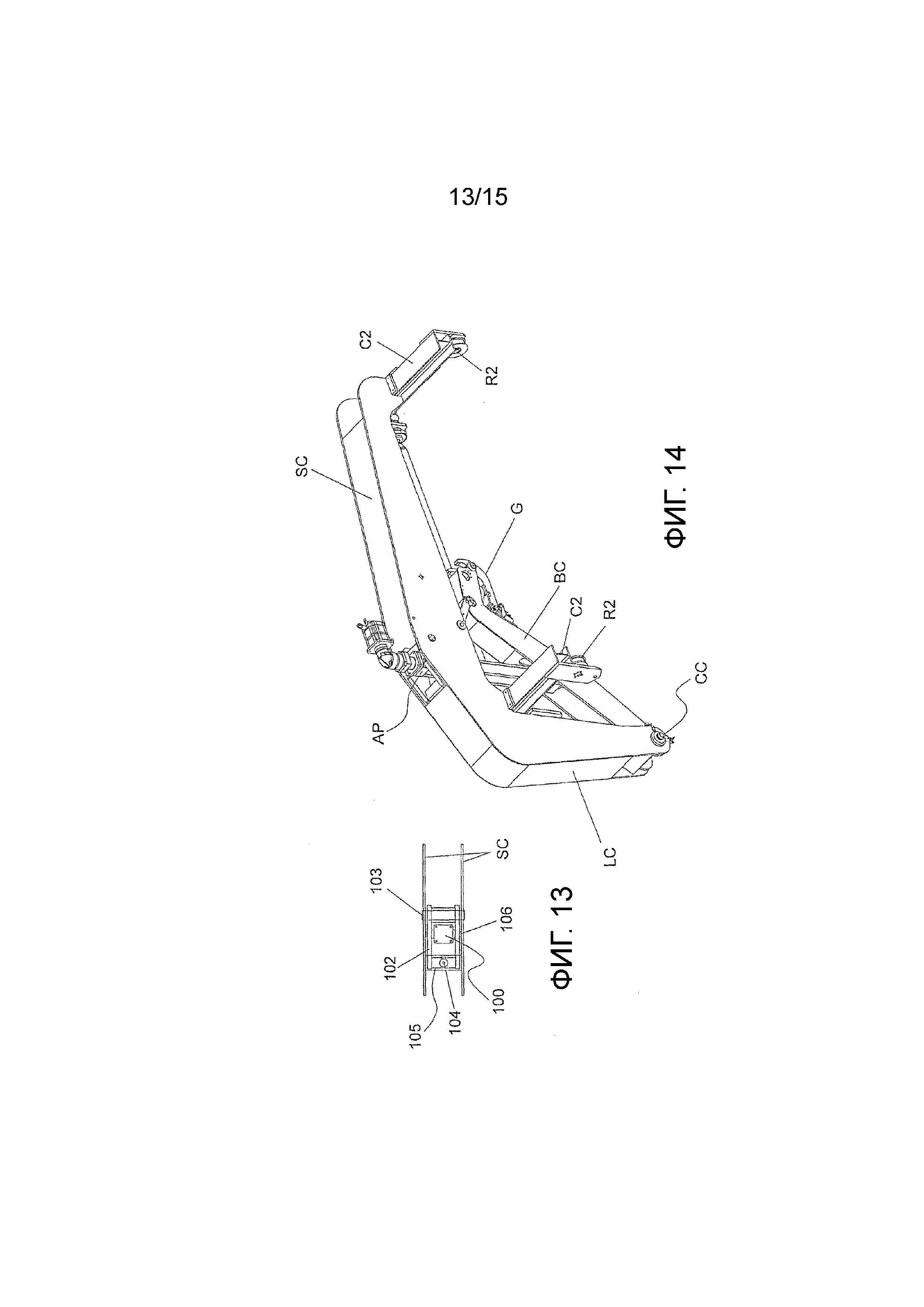
- фиг.13 представляет собой схематический вид сверху исполнительного механизма (АР) и его соединения с соответствующей верхней конструкцией (SC);
- фиг.14 представляет собой вид в перспективе рычага мостового крана с его верхней конструкцией;
- фиг.15А и 15В схематически показывают платформу (РВ) в опущенном и соответственно поднятом положениях;
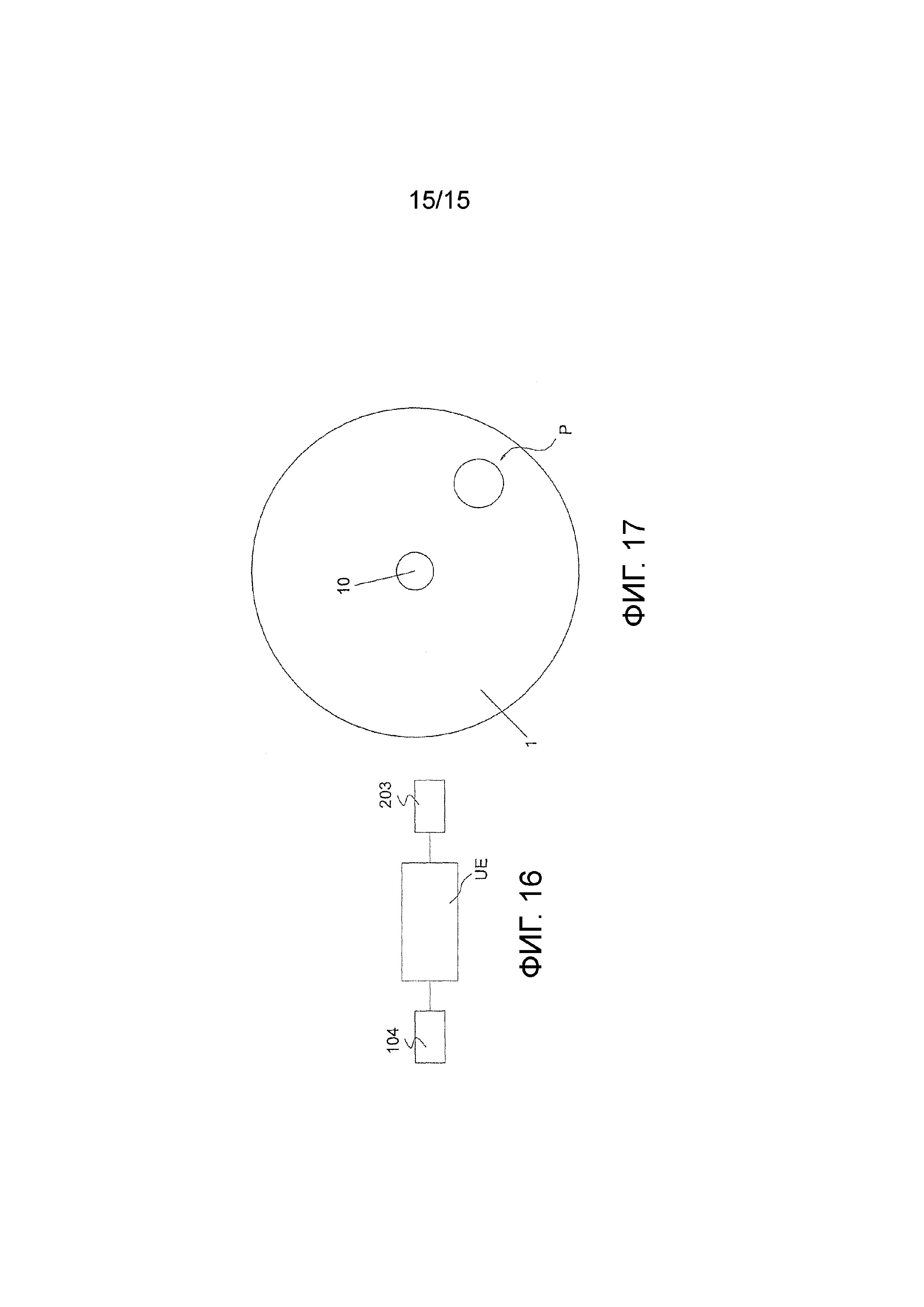
- фиг.16 представляет собой блок-схему возможной системы автоматического управления, которая может быть использована вместе с устройством в соответствии с настоящим изобретением;
- фиг.17 показывает неправильное положение фиксатора относительно материнского рулона.
В нижеприведенном описании сделана ссылка на разжимные «фиксаторы» (Р), которые вставлены в сердечник (10) материнского рулона (1), при этом те же самые фиксаторы (Р) по-прежнему прицеплены к подвижным рычагам (ВС) мостового крана (СР).
Более конкретно, фиксатор (Р) имеет наружную сторону (РХ) и внутреннюю сторону (PN), при этом внутренняя сторона (PN) предназначена для вставки в сердечник (10) рулона (1) и наружная сторона является внешней по отношению к тому же самому рулону (1), когда внутренняя сторона (PN) находится внутри сердечника (10). На фиг.7 и фиг.8 наружная сторона (РХ) находится справа, в то время как внутренняя сторона (РN) находится слева. Фиксатор (Р) является по существу симметричным относительно центральной продольной оси (x-x).
Наружная сторона (РХ) фиксатора (Р) образована хвостовиком (2), продольная ось которого совпадает с продольной осью (x-x) фиксатора (Р). На указанном хвостовике (2) закреплена ручка (3), образованная двумя параллельными консольными элементами (30), выступающими в радиальном направлении от хвостовика (2) и соединенными элементом (31), параллельным указанной продольной оси (x-x). Ручка (3) применяется с верхней стороны хвостовика (2), то есть со стороны последнего, которая при эксплуатации повернута вверх. Хвостовик (2) является полым.
В соответствии с примером, показанным на фиг.7-12, внутренняя сторона (PN) фиксатора (Р) является разжимной: указанная внутренняя сторона расширяется (как показано на фиг.7, фиг.8, фиг.9, фиг.10 и фиг.11), когда она вставлена в сердечник (10) рулона (1), для входа в контактное взаимодействие с последним, при этом она сжимается (как показано на фиг.11) для ее вставки в сердечник (10) или вывода из контактного взаимодействия с рулоном.
Наружная поверхность внутренней стороны (PN) образована множеством секторов (4), число которых в данном примере составляет четыре, каждый из которых образован участком с цилиндрической поверхностью со свободным передним концом (40) и задним концом (41). Фиксатор (Р) также содержит элемент (5), имеющий: заднюю часть (50), вставленную в продольном направлении в полый хвостовик (2) при размещении подшипников (51) между ними; переднюю часть (52), обращенную к переднему концу (40) секторов (4) и состоящую из продольной выступающей части задней части (50), и наружную чашеобразную часть (53), внутренний диаметр (d53) которой превышает наружный диаметр хвостовика (2), в промежуточном месте между задней частью (50) и передней частью (52). На практике задняя часть (50) элемента (5) вставлена в хвостовик (2), промежуточная часть (53) является внешней по отношению к хвостовику, который частично (то есть в его наиболее выдвинутой вперед части) находится внутри чашеобразной промежуточной части (53), и передняя часть (52) образует продолжение элемента (5), которое, как показано на чертежах, является внутренним по отношению к секторам (4).
Задний конец (41) каждого сектора (4) удерживается относительно чашеобразной части (53) элемента (5) посредством стержня (42), вставленного в радиальный выступ (54), выступающий наружу от той же самой чашеобразной части (53). Число указанных выступов (54) в данном примере составляет четыре, и они расположены на угловом расстоянии, составляющим 90°, друг от друга. Ось каждого стержня (42) ориентирована вдоль направления по касательной относительно хвостовика (2), поверхность которого является цилиндрической. Кроме того, каждый стержень (42) расположен на заданном расстоянии от наружной поверхности хвостовика (2), когда стержень (42) вставлен в выступ (54), который функционирует в качестве дистанционирующего элемента.
Секторы (4) идентичны друг другу и разделены линиями разделения или зонами (S4) разрыва непрерывности для обеспечения возможности их перемещения (как дополнительно описано ниже) без столкновений друг с другом. Кроме того, в примере каждый из секторов (4), если смотреть сверху, имеет трапециевидную форму с бóльшим основанием, соответствующим его задней стороне (41).
Каждый сектор (4) также удерживается относительно передней части (52) указанного элемента (5) посредством соединительной штанги (55), шарнирно присоединенной с одной стороны (нижней стороны) к втулке (56), установленной с возможностью скольжения в продольном направлении на передней части (52) элемента (5), и с противоположной стороны (верхней стороны) к внутренней поверхности соответствующего сектора (4). Соединение соединительной штанги (55) с втулкой (56) образовано стержнем (57), ось которого параллельна стержню (42), который соединяет заднюю часть (41) сектора (4) с соответствующим выступом (54) чашеобразной части (53); соединение той же самой соединительной штанги (55) с внутренней стороной сектора (4) выполнено посредством дополнительного стержня (58), параллельного предыдущему стержню (57).
Перед передним концом передней части (52) элемента (5) расположена пневматическая пружина (6), размещенная между двумя плитами (60, 61), которые ортогональны указанной оси (x-x). Первая плита (60) имеет заднюю выступающую часть (62), которая функционирует в качестве дистанционирующего элемента и прикреплена к переднему концу передней части (52) элемента (5). Вторая плита (61) находится с противоположной стороны по отношению к пневматической пружине (6). Несколько штанг (63) соединяют вторую плиту (61) с указанной втулкой (56): каждая штанга (63) прикреплена с одной стороны ко второй плите (61) и с противоположной стороны к заднему выступу (560) втулки (56) и проходит свободно через соответствующее отверстие, образованное в первой плите (60). На каждой из штанг (63) установлена цилиндрическая винтовая пружина (64). Штанги (63) и цилиндрические винтовые пружины (64) ориентированы параллельно указанной оси (x-x), и число штанг (63) составляет четыре в примере, показанном на чертежах.
Когда пневматическая пружина (6) «разгружена», то есть сжата, воздействие цилиндрических винтовых пружин (64) является таким, чтобы удерживать втулку (56) сдвинутой назад на части (52) элемента (5): в этом состоянии задняя часть втулки (56) поджимается пружинами (64) к опорной поверхности (59), имеющейся на элементе (5) между промежуточной частью (53) и передней частью (52), и секторы (4) открыты, при этом соединительные штанги (55) ориентированы вдоль радиального направления относительно оси (x-x), то есть ориентированы параллельно нагрузке, действующей на фиксатор (Р).
Секторы (4) нормально открыты.
При «нагружении», то есть расширении, пневматической пружины (6) обеспечивается преодоление сопротивления пружин (64), и втулка (56) перемещается вперед вместе с основанием соединительных штанг (55), в результате чего секторы (4) закрываются при взаимном сближении соответствующих передних концов (40).
Сжатый воздух вводится в пневматическую пружину (6) или удаляется через продольное сквозное отверстие (5F), образованное в элементе (5).
Таким образом, секторы (4) могут быть раскрыты и закрыты посредством их поворота вокруг стержней (42).
Фиг.1-6 показывают мостовой кран (СР), предусмотренный с подвижными рычагами (ВС), и платформу (РВ), на которой размещен рулон (1), подлежащий удалению.
Мостовой кран (СР) имеет два рычага (ВС), каждый из которых соединен - посредством шарнира с горизонтальной осью (С-С) - с нижней выступающей частью (LC) верхней конструкции (SC). Последняя смонтирована на тележке (СА), установленной с возможностью перемещения (посредством электродвигателя, не показанного на чертежах, обычным образом) вдоль прямолинейной направляющей (GR), расположенной на заданной высоте относительно нижнего основания платформы (РВ). Направляющая (GR) показана только на фиг.1 и фиг.2, при этом ссылочные позиции ʺRCʺ обозначают колеса тележки (СА), выполненной с возможностью передвижения по балкам, которые образуют направляющую (GR), при этом на остальных фигурах она не показана для простоты. Две верхние конструкции (SC) и соответствующие выступающие части (LC) и подвижные рычаги (ВС) могут быть приближены друг к другу или удалены друг от друга, то есть могут быть перемещены ортогонально к направлению (F) плавного перемещения мостового крана (СР) вдоль направляющей (GR). На фиг.2, фиг.4 и фиг.6 стрелки (Н) показывают взаимное сближение рычагов (ВС) во время вставки фиксаторов (Р), введенных в контактное взаимодействие с ними, в соответствующие концы сердечника (10) рулона (1). Для этого каждая из двух верхних конструкций (SC) образует одно целое со второй тележкой (2С), снабженной колесами (2R), плавно перемещающимися по направляющим (2G), образуемым верхней поверхностью первой тележки (СА). Управление каждой из тележек (2С) осуществляется посредством соответствующего силового гидравлического цилиндра (2М), который обеспечивает управление ее поступательным перемещением вдоль направляющих (2G) на верхней стороне первой тележки (СА), которые проходят вдоль направления, ортогонального к направлению балок, которые образуют направляющую (GR), по которой перемещается первая тележка (СА). Каждый силовой гидравлический цилиндр (2М) прикреплен посредством его кожуха к кронштейну, закрепленному в центральном месте на первой тележке (СА), и посредством его штока присоединен к внутренней стороне соответствующей верхней конструкции (SC). Таким образом, каждая из указанных верхних конструкций (SC) с соответствующим рычагом (ВС) может быть перемещена в двух направлениях как вдоль направляющей (GR), так и ортогонально к последней.
Каждый подвижный рычаг (ВС) мостового крана (СР) снабжен на его свободном конце подвижным крюком (G), который, в свою очередь, имеет свободный конец, которому придана форма крюка для облегчения его размещения под элементом (31) ручки (3). Крюк (G) шарнирно присоединен на свободном конце подвижного рычага (ВС) посредством стержня (PG) с горизонтальной осью и имеет заднюю сторону, соединенную с пневматической пружиной (МР), посредством которой тот же самый крюк (G) может быть повернут в направлении по часовой стрелке или против часовой стрелки вокруг шарнира (PG).
Управление поворотом каждого подвижного рычага (ВС) вокруг оси шарнира (СС) осуществляется посредством соответствующего исполнительного механизма (АР), который имеет полый цилиндр (100), прикрепленный к верхней конструкции (SC), и шток (101), присоединенный к подвижному рычагу (ВС). Более конкретно, указанный полый цилиндр (100) шарнирно присоединен к кронштейну (102) посредством горизонтального стержня (106). Кронштейн (102) с одной стороны (с правой стороны на чертежах) шарнирно присоединен к верхней конструкции (SC) посредством стержня (103) с горизонтальной осью, ориентированной ортогонально к той же самой верхней конструкции («выходящей» из листа). Со стороны, противоположной по отношению к стержню (103), на верхней конструкции (SC) применяется динамометрический датчик (104), находящийся в фиксированном положении под свободным концом (105) кронштейна (102). Другими словами, динамометрический датчик (104) находится в фиксированном положении под концом (105) кронштейна (102), противоположным по отношению к концу того же самого кронштейна, шарнирно присоединенному к верхней конструкции (SC) посредством стержня (103). Как можно увидеть на фрагменте по фиг.14, указанная верхняя конструкция (SC) является коробчатой, как и кронштейн (102), который расположен между двумя сторонами верхней конструкции (SC). Стержень (103) проходит перпендикулярно к сторонам верхней конструкции (SC), в то время как стержень (106), который параллелен стержню (103), проходит перпендикулярно к сторонам кронштейна (102). Как показано на фиг.14, рычаги (ВС) и выступающая часть (LC) также имеют коробчатую форму, как и верхняя конструкция (SC). Стержень (СС), который соединяет подвижный рычаг (ВС) с выступающей частью (LC), проходит перпендикулярно к данным элементам. Исполнительный механизм (АР) расположен между сторонами рычагов (ВС) и верхней конструкции (SC).
Три возможных случая, относящихся к фазе ввода фиксаторов (Р) в сердечник (10) рулона (1), таковы.
Случай 1: ось рулона (1) выровнена относительно оси (x-x) фиксаторов (Р), и отсутствуют какие-либо значительные изменения веса, действующего на динамометрический датчик (104), во время ввода фиксаторов (Р) в сердечник рулона. Данный случай проиллюстрирован на фиг.1 и фиг.2А-2В. В частности, на фиг.2А рычаг (ВС), находящийся справа, уже обеспечил ввод соответствующего фиксатора (Р) в сердечник (10) рулона (1), в то время как рычаг (ВС), находящийся слева, еще «открыт», то есть соответствующий фиксатор (Р) находится вне рулона (1). На фиг.2В оба рычага (ВС) «закрыты», то есть оба фиксатора (Р) вставлены в рулон (1). Тем не менее, само собой разумеется, два рычага (ВС) могут быть перемещены одновременно, как показано стрелками ʺHʺ.
Случай 2: ось сердечника (10) рулона (1) находится ниже, чем ось (x-x), то есть под осью (x-x), фиксаторов (Р), и во время ввода фиксаторов они вызывают подъем рулона (1), так что динамометрический датчик (104) определяет увеличение значения веса, которое превышает заданный предел. В этом случае платформа (РВ), на которой размещен рулон (1), обеспечивает коррекцию положения последнего посредством его подъема, как дополнительно раскрыто в дальнейшем, до тех пор, пока нагрузка, измеряемая динамометрическим датчиком, не станет равной нагрузке, обусловленной только весом фиксаторов (Р).
Случай 3: ось сердечника (10) рулона (1) находится выше, чем ось (x-x), то есть над осью (x-x), фиксаторов (Р), и во время ввода фиксаторов они подвергаются подъему, так что динамометрический датчик (104) определяет уменьшение значения веса, которое превышает заданный предел. В этом случае платформа (РВ), на которой размещен рулон (1), обеспечивает коррекцию положения последнего посредством его опускания, как дополнительно раскрыто в дальнейшем, до тех пор, пока нагрузка, измеряемая динамометрическим датчиком, не станет равной нагрузке, обусловленной только весом фиксаторов (Р).
Вывод фиксаторов (Р) из контактного взаимодействия с сердечником (10) рулона (1) будет обеспечен посредством перемещения рычагов (ВС) в направлении, противоположном направлению, показанному стрелками ʺHʺ, при этом фиксаторы удерживаются относительно крюков (G) тех же самых подвижных рычагов.
Например, платформа (РВ) может быть поднята и опущена посредством пантографного механизма, расположенного и функционирующего под той же самой платформой (РВ). Таким образом, существует возможность регулирования высоты платформы и, следовательно, высоты сердечника (10) рулона (1) относительно фиксаторов (Р), соединенных с рычагами (ВС) мостового крана (СР). Указанный механизм содержит нижнее основание (200) и верхнее основание (201), соединенные посредством рычагов (202), шарнирно соединенных друг с другом и с теми же основаниями (200, 201) и соединенных посредством исполнительного механизма (203). Последний само по себе известным образом, когда он приведен в действие, определяет поворот рычагов (202) и, кроме того, подъем или опускание верхнего основания (201), на котором расположена платформа (РВ). Следовательно, обеспечивается подъем или опускание рулона (1). Следует понимать, что механизм для подъема/опускания платформы (РВ) может представлять собой механизм любого другого типа. Для упрощения на фиг.1, 3 и 5 механизм для подъема/опускания платформы (РВ) не показан.
Кронштейн (102) и динамометрический датчик (104) в соответствии с примером, описанным выше, образуют возможный вариант осуществления устройства для обнаружения изменений нагрузки на рычагах (ВС) мостового крана (СР). Указанное устройство может быть соединено с программируемым устройством (UE), как на упрощенной схеме по фиг.13, которое управляет опусканием или подъемом платформы (РВ) за счет воздействия на исполнительный механизм (203) для устранения данных изменений.
Следовательно, устройство в соответствии с настоящим изобретением содержит мостовой кран (СР) с подвижными рычагами (ВС), каждый из которых выполнен с возможностью входа в контактное взаимодействие с фиксатором (Р), вставляемым в соответствующую сторону рулона (1), и платформу (РВ), расположенную под указанным основанием (11) для обеспечения опоры для рулона (1), и содержит средства обнаружения, выполненные с возможностью обнаружения изменений нагрузки на указанных рычагах (ВС) во время вставки фиксаторов (Р) в рулон (1), и средства перемещения, выполненные с возможностью обеспечения вертикального перемещения рулона (1) и рычагов (ВС) друг относительно друга, когда абсолютная величина изменения нагрузки, определенная указанными средствами обнаружения, превышает заданный предел, до доведения указанной величины до значения ниже заданного предела.
В соответствии с примерами, раскрытыми выше:
- указанные средства перемещения выполнены с возможностью обеспечения перемещения рулона (1) в вертикальном направлении относительно рычагов (ВС);
- указанные средства перемещения содержат механизм для подъема и опускания указанной платформы (РВ);
- указанный механизм для подъема и опускания платформы (РВ) представляет собой пантографный механизм;
- указанные средства для обнаружения изменений нагрузки на рычагах (ВС) содержат для каждого рычага (ВС) динамометрический датчик (104), применяемый в фиксированном положении на конструкции (SC) мостового крана (СР), к которой присоединены рычаги (ВС), и элемент (102), выполненный с возможностью воздействия на динамометрический датчик (104), при этом каждый элемент (102) соединен с соответствующим рычагом (ВС);
- каждый элемент (102) соединен с соответствующим рычагом (ВС) посредством исполнительного механизма (АР), который соединяет тот же самый рычаг (ВС) с указанной конструкцией (SC);
- указанные средства обнаружения и указанные средства перемещения соединены с программируемым устройством (UP), которое получает электрические сигналы, передаваемые средствами обнаружения, и управляет средствами перемещения и запрограммировано для приведения в действие средств перемещения в соответствии с сигналами, передаваемыми средствами обнаружения;
- фиксаторы (Р) представляют собой разжимные фиксаторы.
Следует понимать, что вышеупомянутая коррекция может быть выполнена посредством опускания или подъема рычагов мостового крана и оставления платформы (РВ) в фиксированном положении. В этом случае устройство (UP) будет соединено с исполнительными механизмами (АР) для опускания или подъема рычагов (ВС), когда, как упомянуто ранее, динамометрический датчик (104) - или другое соответствующее устройство обнаружения - обнаружит изменение нагрузки на рычагах (ВС), абсолютная величина которого превышает заданный предел, до доведения данной величины до значения ниже заданного предела.
Средства для обнаружения изменения нагрузки также пригодны для взвешивания рулона. Таким образом, существует возможность отслеживания количества обработанного материала путем вычисления разности веса рулона (1) в начале и его веса в конце этапа размотки.
Кроме того, при использовании динамометрического датчика, размещенного соответствующим образом относительно рычагов мостового крана, могут быть определены также изменения в нагрузках, действующих в направлении, параллельном оси рулона (1). Например, если рассматривать возможный случай, проиллюстрированный на фиг.17, то видно, что фиксатор (Р) находится справа и ниже сердечника (10): изменение нагрузки, действующей в направлении, параллельном продольной оси сердечника, во время приближения рычага, несущего фиксатор (Р), будет больше заданного предела (действительно, фиксатор Р находится в положении, в котором он не может быть вставлен в сердечник рулона 1). В таком состоянии управляющее устройство (UP) выдаст команду на останов рычага, который несет фиксатор (Р), для предотвращения повреждения рулона (1).
На практике детали исполнения могут различаться любым эквивалентным образом по отношению к элементам, описанным и показанным на чертежах, без отхода от идеи выбранного решения и при этом остаются в пределах объема охраны, предоставляемого настоящим патентом.
Реферат
Изобретение относится к области обработки рулонных материалов. Устройство для манипулирования материнскими рулонами содержит мостовой кран с подвижными рычагами, платформу, средства обнаружения и средства перемещения. Каждый из рычагов выполнен с возможностью входа в контактное взаимодействие с фиксатором. Фиксатор вставляется в соответствующую сторону рулона. Платформа выполнена с возможностью обеспечения опоры для рулона. Средства обнаружения выполнены с возможностью обнаружения изменений нагрузки на рычагах во время вставки фиксаторов внутрь рулона. Средства перемещения выполнены с возможностью обеспечения перемещения рулона и рычагов относительно друг друга при превышении заданного предела нагрузки и доведения нагрузки до значения ниже заданного предела. Обеспечивается точное выравнивание рычагов крана относительно сердечника рулона. 9 з.п. ф-лы, 17 ил.
Формула
Документы, цитированные в отчёте о поиске
Устройство и способ перемещения бобины в разматывателе
Комментарии