Пневмогравитационная транспортная секция - RU2757698C1
Код документа: RU2757698C1
Чертежи


Описание
Изобретение относится к контейнерному гравитационному транспорту и может быть использовано для перемещения технологических материалов и комплектующих изделий, применяемых в процессе промышленного производства.
Известна транспортная система маятникового типа, содержащая стационарный направляющий путь с наклонными участками гравитационного разгона и замедления колесного транспортного средства (контейнера), признаки которой реализованы, по существу, во всех гравитационных транспортных системах, и являющаяся аналогом предлагаемого устройства. Стационарный направляющий путь имеет шарнирно закрепленные концевые участки, с механизмами изменения угла их наклона, для придания колесному транспортному средству потенциальной энергии перед началом его движения. В местах соединения участков разгона и замедления установлены дополнительные направляющие в виде отдельных, прямолинейных участков (см. патент RU № 2077435, МПК6 B61B 1/00, 15/00, опубл. 20.04.1997 г.).
Недостатком данного устройства является невозможность перемещения колесного транспортного средства непосредственно в горизонтальном направлении из-за наличия установленных под углом друг к другу участков гравитационного разгона и замедления, которые увеличивают габаритные размеры транспортной системы и уменьшают возможное расстояние перемещения транспортного средства. Кроме того, одновременно с подъемом транспортного средства, для придания ему потенциальной энергии, требуется поднимать и концевые участки транспортного пути, что требует дополнительных затрат энергии. Отмеченные недостатки ограничивают области применения устройства в системах транспортировки технологических материалов.
Наиболее близким к заявляемому техническому решению является гравитационное транспортное средство для перевозки людей или грузов, состоящее из опор, между которыми, под углом к горизонтальной плоскости, жестко закреплена несущая поверхность с движущимся по ней, под действием силы тяжести, колесным транспортным средством (контейнером). Конструкция несущей поверхности позволяет удерживать контейнер на несущей поверхности. Внутри опор расположены подъемники для вертикального перемещения, между поверхностью земли и несущей поверхностью, людей, грузов, колесных контейнеров. В состав гравитационного транспортного средства также входят устройства разгона и торможения контейнера (патент WO 2009/132518 A1, МПК2006/01 B65G 9/00, В66В 20/00, В61В 5/00,7/00, 9/00, 12/02, опубл. 11.05.2009 г.). С помощью данного устройства, из отдельных секций, можно собирать гравитационные транспортные системы неограниченной протяженности.
Недостатками прототипа является сложность транспортной системы и невозможность оперативно изменять направление движения транспортного средства, жесткая связь несущей поверхности с опорами не позволяет устройству работать в челночном режиме. Отмеченные недостатки усложняют адаптацию прототипа для транспортировки контейнеров в технологических процессах промышленного производства.
Техническим результатом предлагаемого технического решения является упрощение конструкции, расширение функциональных возможностей и снижение транспортных энергозатрат.
Данный технический результат достигается тем, что в пневмогравитационной транспортной секции, содержащей опоры, с механизмами подъема грузов, между которыми закреплена несущая поверхность для перемещения контейнеров, согласно изобретению, несущая поверхность, закреплена на стационарной опоре с помощью шарнирного соединения, расположенного по центру несущей поверхности, а концевые участки несущей поверхности снабжены шарнирными узлами, соединенными со штоками, стационарно закрепленных трехпозиционных пневмоцилиндров, штуцеры которых подключены к пневмораспределителям сжатого воздуха, при этом на трехпозиционных пневмоцилиндрах установлены датчики контроля положения штоков, а в местах крепления несущей поверхности к стационарной опоре и к штокам трехпозиционных пневмоцилиндров установлены датчики контроля положения и скорости движения транспортного контейнера, все датчики подключены к системе управления пневмораспределителями сжатого воздуха.
Концевые оси несущей поверхности и оси штоков трехпозиционных пневмоцилиндров соединены между собой металлической пластиной с помощью шарнирных соединений, выполненных на основе подшипников качения.
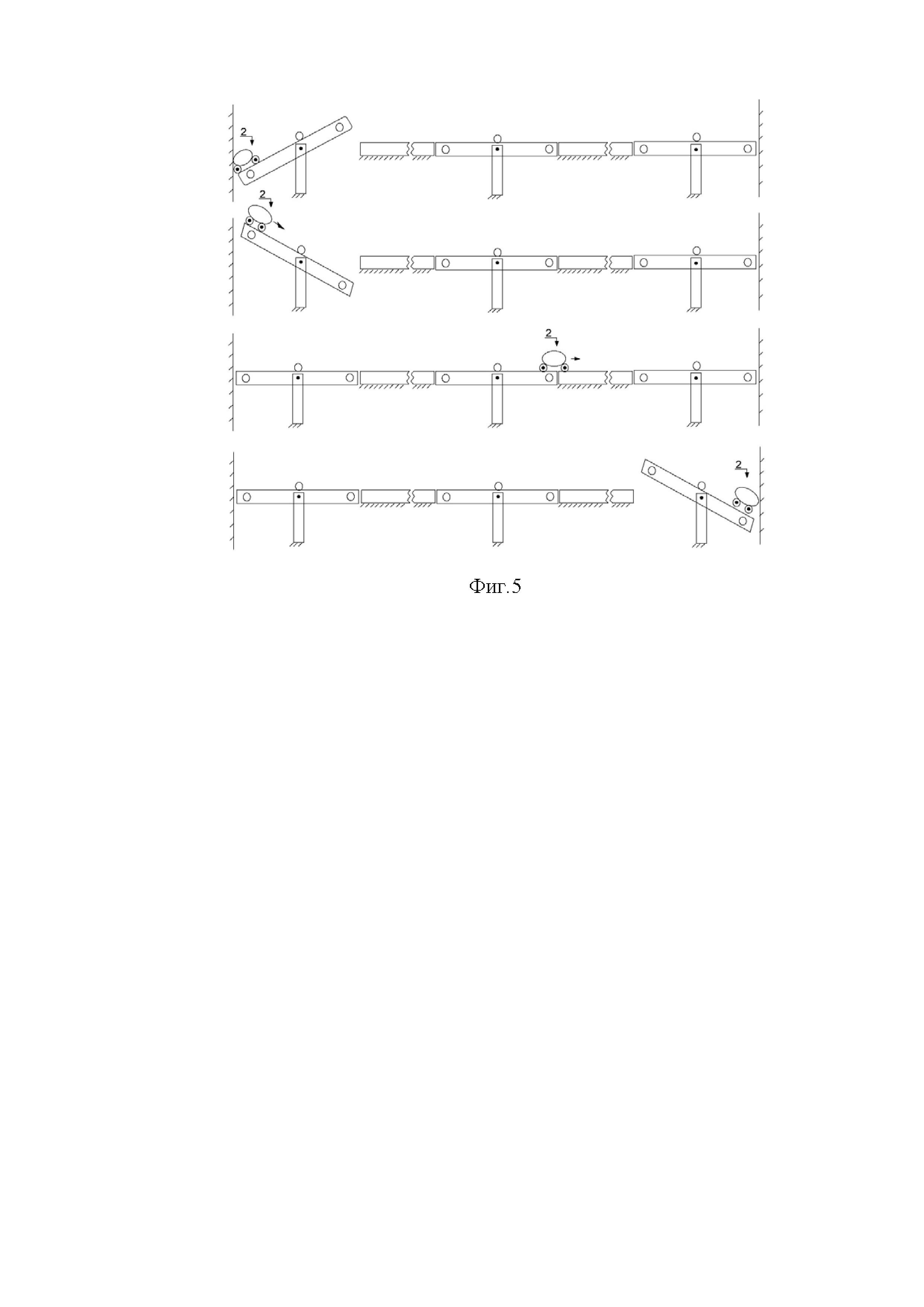
Сущность изобретения поясняется чертежами, где на фиг. 1 изображена функциональная схема пневмогравитационной транспортной секции, на фиг. 2 – схема шарнирного соединения несущей поверхности с опорой, на фиг. 3 – схема шарнирных узлов, соединяющих концевые участки несущей поверхности со штоками пневмоцилиндров, на фиг. 4 – состояние механизмов транспортной секции в режиме гравитационного разгона или торможения контейнера, на фиг. 5 – пример транспортной системы, состоящей из активных пневмогравитационных и пассивных секций.
Пневмогравитационная транспортная секция состоит из несущей поверхности 1, выполненной в виде прямоугольного желоба, для перемещения контейнера 2, и датчиков контроля 3, 4, 5 положения и скорости движения транспортного контейнера 2. Несущая поверхность 1 закреплена, с помощью шарнирного соединения 6, на стационарной опоре 7, расположенной по её центру.
Концевые участки несущей поверхности 1 с помощью шарнирных узлов 8 соединены со штоками 9, стационарно закрепленных трехпозиционных пневмоцилиндров 10. Штоки 9 трехпозиционных пневмоцилиндров 10 могут быть зафиксированы водном из трех положений: «нижнем», «среднем», «верхнем». При этом на трехпозиционных пневмоцилиндрах 10 установлены датчики 11 контроля положения штоков 9. Причем датчики 3, 4, 5, 11 подключены к системе управления 12 пневмораспределителями 13 сжатого воздуха, поступающего через штуцеры 14 в пневмоцилиндры 10 для перемещения штоков 9 и изменения угла наклона несущей поверхности 1.
Центральные оси 15 несущей поверхности 1, с помощью подшипников качения 16, опираются на стационарную опору 7 (см. фиг. 2).
Концевые оси 17 несущей поверхности 1 и оси 18 штоков 9 соединены между собой металлической пластиной 19, с помощью шарнирных соединений, выполненных на основе подшипников качения 16 (см. фиг. 3).
Пневмогравитационная транспортная секция работает следующим образом.
Пневмогравитационная транспортная секция может использоваться как самостоятельно, так и в составе транспортной линии, образованной последовательным соединением отдельных секций.
Пневмогравитационная транспортная секция работает в режимах приема контейнера, гравитационного разгона, гравитационного торможения и в режиме пассивного состояния секции, при котором контейнер 2 по инерции движется по несущей поверхности 1.
Принципы работы транспортной секции поясняются схемами, показанными на фигурах: фиг. 1; фиг. 4; фиг. 5.
Состояние механизмов транспортной секции, которое используется, при работе секции в составе транспортной линии, для приема контейнера 2 из соседних секций или при работе секции в пассивном режиме для беспрепятственного движения контейнера по инерции через несущую поверхность 1 секции, показано на фиг. 1.
Система управления 12 с помощью пневмораспределителей 13 управляет направлением подачи сжатого воздуха через штуцеры 14 трехпозиционных пневмоцилиндров 10, при этом, штоки 9 пневмоцилиндров 10 фиксируются в «среднем» положении, что обеспечивает установку несущей поверхности 1 в горизонтальное положение. На фиг. 1 показано направление сжатого воздуха, обеспечивающее горизонтальное положение несущей поверхности. Сигналы соответствующих датчиков 11 поступают в систему управления 12, подтверждая состояние несущей поверхности 1.
При движении контейнера 2 по транспортной линии, например, слева направо, контейнер, поступив на несущую поверхность 1 секции, попадает в зону действия датчика 3, приняв сигнал от этого датчика, система управления 12 с помощью пневмораспределителей 13 изменяет направление подачи сжатого воздуха, через штуцеры 14, в пневмоцилиндры 10 механизмы секции принимают состояние, показанное на фиг. 4. Шток 9 левого пневмоцилиндра установлен в «верхнее» положение, а шток 9 правого пневмоцилиндра установлен в «нижнее» положение. Поднятый транспортный контейнер 2 получает запас потенциальной энергии и расходует его на движение по инерции. Двигаясь по наклонной несущей поверхности 1 секции, контейнер 2 попадает в зону действия датчика 4, сигнал которого поступает в систему управления 12 и инициирует процесс перевода механизмов секции в состояние, показанное на фиг. 1. Контейнер 2 продолжает движение по инерции, переходит на следующую секцию транспортной линии или останавливается, израсходовав накопленную энергию.
Аналогичным образом осуществляется движение контейнера справа налево, при этом, контейнер 2 активирует датчик 5, что вызывает подъем контейнера 2 относительно горизонтальной поверхности и его движение по наклонной несущей поверхности 1 до датчика 4, сигнал которого запускает процесс перевода несущей поверхности 1 в горизонтальное положение.
Состояние механизмов транспортной секции также используется для гравитационного торможения контейнера 2 (см. фиг. 4), движущегося справа налево, при этом сигнал датчика 5 вызывает опускание принятого контейнера 2 относительно горизонтальной поверхности, контейнер 2 продолжает движение по инерции, теряет энергию, при пересечении контейнером 2 зоны действия датчика 4 несущая поверхность 1 переводится в горизонтальное положение, обеспечивается парковка транспортного контейнера 2. Аналогичным образом осуществляется процесс гравитационного торможения при движении контейнера 2 слева направо, в этом случае процесс торможения запускает сигнал датчика 3, поступающий в систему управления 12.
Шарнирное соединение 6 несущей поверхности 1 со стационарной опорой 7 делит несущую поверхность 1 на две равноуравновешенные части, поэтому энергия сжатого воздуха, поступающего в пневмоцилиндры 10, расходуется только на подъем веса транспортного контейнера 2.
Шарнирные соединения 8 устраняют поперечные нагрузки на штоки 9 пневмоцилиндров 10, обеспечивая движение концевых участков несущей поверхности 1 по дуге окружности, центр которой расположен в точке соединения несущей поверхности 1 с опорой 7 (см. фиг. 1).
Приведен пример транспортной линии, состоящей из активных пневмогравитационных и пассивных секций (см. фиг. 5). Показано состояние секций транспортной линии в процессе движения контейнера 2 слева направо. Крайние пневмогравитационные транспортные секции служат для придания контейнеру 2 начальной потенциальной энергии, а также для гравитационного торможения и парковки контейнера 2. На фиг. 5 показано одно из возможных положений припаркованного контейнера 2.
Промежуточная активная секция служит для придания контейнеру 2 дополнительной энергии или для гашения избыточной энергии накопленной контейнером 2. Пассивные секции транспортной линии, используемые для движения контейнера 2 по инерции, также снабжаются датчиками, контролирующими скорость движения контейнера, это дает возможность менять алгоритм работы промежуточной активной секции и использовать ее или для гравитационного разгона, или для гравитационного торможения, или для пассивного движения контейнера 2 по инерции.
Использование пневмогравитационной транспортной секции позволит по сравнению с прототипом упростить конструкцию, повысить ее надежность, расширить функциональные возможности и уменьшить транспортные энергозатраты.
Реферат
Изобретение относится к контейнерному гравитационному транспорту и может быть использовано для перемещения технологических материалов и комплектующих изделий, применяемых в процессе промышленного производства. Секция содержит опоры с механизмами подъема грузов, между которыми закреплена несущая поверхность для перемещения контейнеров, причем несущая поверхность закреплена на стационарной опоре с помощью шарнирного соединения, расположенного по центру несущей поверхности, а концевые участки несущей поверхности снабжены шарнирными узлами, соединенными со штоками стационарно закрепленных трехпозиционных пневмоцилиндров, штуцеры которых подключены к пневмораспределителям сжатого воздуха. На трехпозиционных пневмоцилиндрах установлены датчики контроля положения штоков, а в местах крепления несущей поверхности к стационарной опоре и к штокам трехпозиционных пневмоцилиндров установлены датчики контроля положения и скорости движения транспортного контейнера. Все датчики подключены к системе управления пневмораспределителями сжатого воздуха. Концевые оси несущей поверхности и оси штоков трехпозиционных пневмоцилиндров соединены между собой металлической пластиной с помощью шарнирных соединений. Обеспечивается упрощение конструкции, расширение функциональных возможностей и снижение транспортных энергозатрат. 1 з.п. ф-лы, 5 ил.
Формула
Документы, цитированные в отчёте о поиске
Конвейер для транспортирования сыпучих и кусковых материалов
Комментарии