Конвейер для транспортирования сыпучих и кусковых материалов - RU2702211C1
Код документа: RU2702211C1
Чертежи
Описание
Изобретение относится к оборудованию для накопления и перегрузки сыпучих и кусковых материалов и грузов, например, в горной промышленности и др. Использование изобретения возможно, например, при применении технологии проведения выработок проходческими комбайнами, с последующим накоплением горной массы и перегрузкой в транспортные средства циклического действия, например - в самосвалы.
Известен конвейер для транспортирования сыпучих и кусковых материалов (см. патент РФ №2108955, МПК B65G 25/00), включающий продольные борта, днище, привод и подвижные и неподвижные транспортирующие элементы, расположенные в ряд поочередно и параллельно друг другу, имеющие в поперечном сечении форму клина и содержащие опорную и две рабочие поверхности, днище конвейера жестко соединено с бортами и неподвижными клиновыми транспортирующими элементами. Подвижные клиновые транспортирующие элементы шарнирно соединены между собой посредством тяг и установлены опорными поверхностями на днище конвейера с возможностью совершать возвратно-поступательное движение относительно днища при помощи привода. Недостатком указанного технического решения является низкая эффективность рабочего процесса в связи с наличием вредных сопротивлений, создаваемых неподвижными клиньями в процессе работы и частичным перемещением материала при обратном движении клинового элемента.
Указанный недостаток частично устраняется в техническом решении конвейера для транспортирования сыпучих и кусковых материалов (см. патент РФ №2108954, МПК B65G 25/00), включающем продольные борта, днище, установленное с возможностью возвратно-поступательного перемещения от привода, выполненного в виде силовых цилиндров, и подвижные и неподвижные транспортирующие элементы, имеющие в поперечном сечении форму клина и расположенные в ряд поочередно, параллельно друг другу. Подвижные транспортирующие элементы соединены с днищем конвейера, а неподвижные закреплены на продольных бортах конвейера. Подвижные клиновые транспортирующие элементы шарнирно соединены с днищем конвейера и установлены с возможностью отклонения их в нерабочее положение посредством жестко соединенных с ними отклоняющих элементов, соединенных между собой при помощи тяг, которые шарнирно соединены со штоками силовых цилиндров. Подвижный клиновой транспортирующий элемент шарнирно соединен с днищем при помощи оси, а отклоняющий элемент выполнен в виде рычага. Отклоняющий элемент выполнен в виде коленчатого вала, цапфы которого жестко соединены с подвижным клиновым транспортирующим элементом и шарнирно соединены с днищем, а шейка вала шарнирно соединена с тягами.
Однако, данное техническое решение так же предусматривает неподвижные транспортирующие элементы и не устраняет возвратно-поступательное движение днища конвейера, что приводит к увеличению энергозатрат и снижение производительности.
Указанный недостаток частично устраняется в техническом решении конвейера (прототип) для транспортирования сыпучих и кусковых материалов, включающем желоб, состоящий из днища, установленного неподвижно относительно бортов, приводные силовые цилиндры, и транспортирующие элементы выполненные в виде двух пластин, шарнирно соединенных друг с другом, при этом, одна из пластин шарнирно соединена с приводными гидроцилиндрами, а вторая пластина кинематически связана с бортами конвейера (см. патент РФ №2664616, МПК B65G 25/08).
Недостатком данного технического решения является необходимость совершения возвратно-поступательного движения транспортирующими элементами для заполнения желоба погружаемым материалом и последующей перегрузкой его в транспортное средство, что приводит к повышению энергозатрат и снижению производительности.
Целью изобретения является повышение производительности и эффективности транспортирования сыпучих и кусковых материалов за счет исключения из конструкции конвейера транспортирующих элементов, используемых для заполнения желоба материалом.
Поставленная цель достигается тем, что в конвейере, содержащем став, желоб, транспортирующий элемент, откидной борт, силовые цилиндры и элементы управления приводом, в том числе распределители, желоб соединен со ставом шарнирно, с возможностью изменения в процессе работы угла его наклона относительно горизонта посредством силового цилиндра подъема желоба, а полость цилиндра, кинематически связанного с откидным бортом, соединена с датчиком давления, подающим сигналы на распределитель, управляющий силовым цилиндром подъема желоба.
Такое техническое решение позволяет исключить из конструкции конвейера транспортирующие элементы, необходимые для заполнения желоба материалом и обеспечить его равномерную загрузку за счет силы гравитации. Установка датчика давления в линии, соединяющей силовой гидроцилиндр, кинематически связанный с откидным бортом, с распределителем, управляющим силовым цилиндром подъема желоба конвейера, обеспечит равномерную, автоматическую загрузку желоба погружаемым материалом, за счет изменения угла его наклона, в зависимости от величины нагрузки на откидной борт со стороны погружаемого материала.
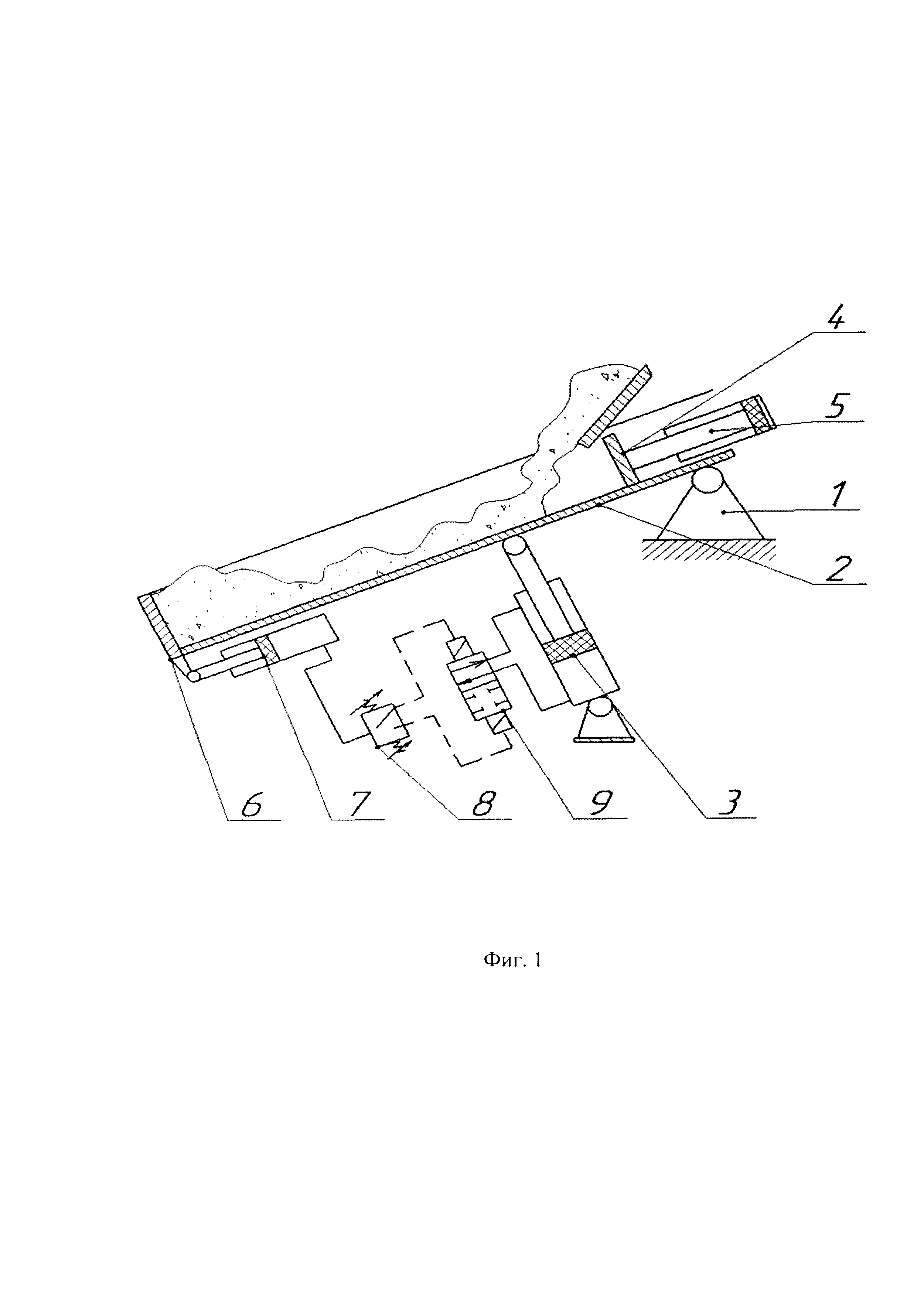
Сущность изобретения поясняется чертежами, где на фиг. 1 представлена принципиальная кинематическая схема предлагаемого конвейера.
Конвейер для транспортирования сыпучих и кусковых материалов состоит из неподвижного става 1, желоба 2, соединенного шарнирно со ставом 1 посредством силового цилиндра подъема желоба 3, транспортирующего элемента 4, приводимого в действие силовым цилиндром 5, откидного борта 6, приводимого в действие силовым цилиндром 7, кинематически связанным с откидным бортом 6, с полостью которого соединен датчик давления 8 (например, электроконтактный манометр [3]), подающий сигналы на распределитель 9, управляющий силовым цилиндром подъема желоба.
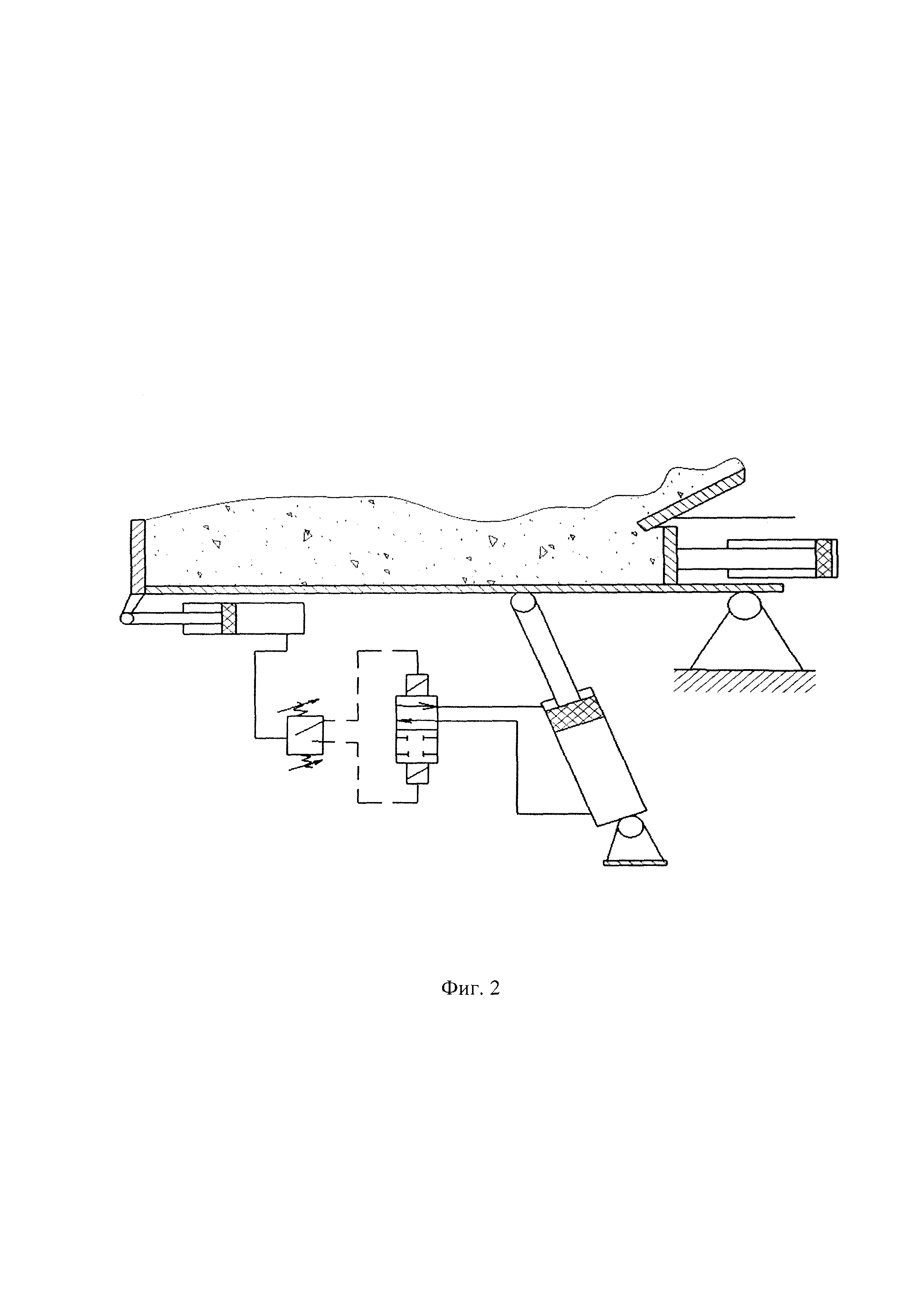
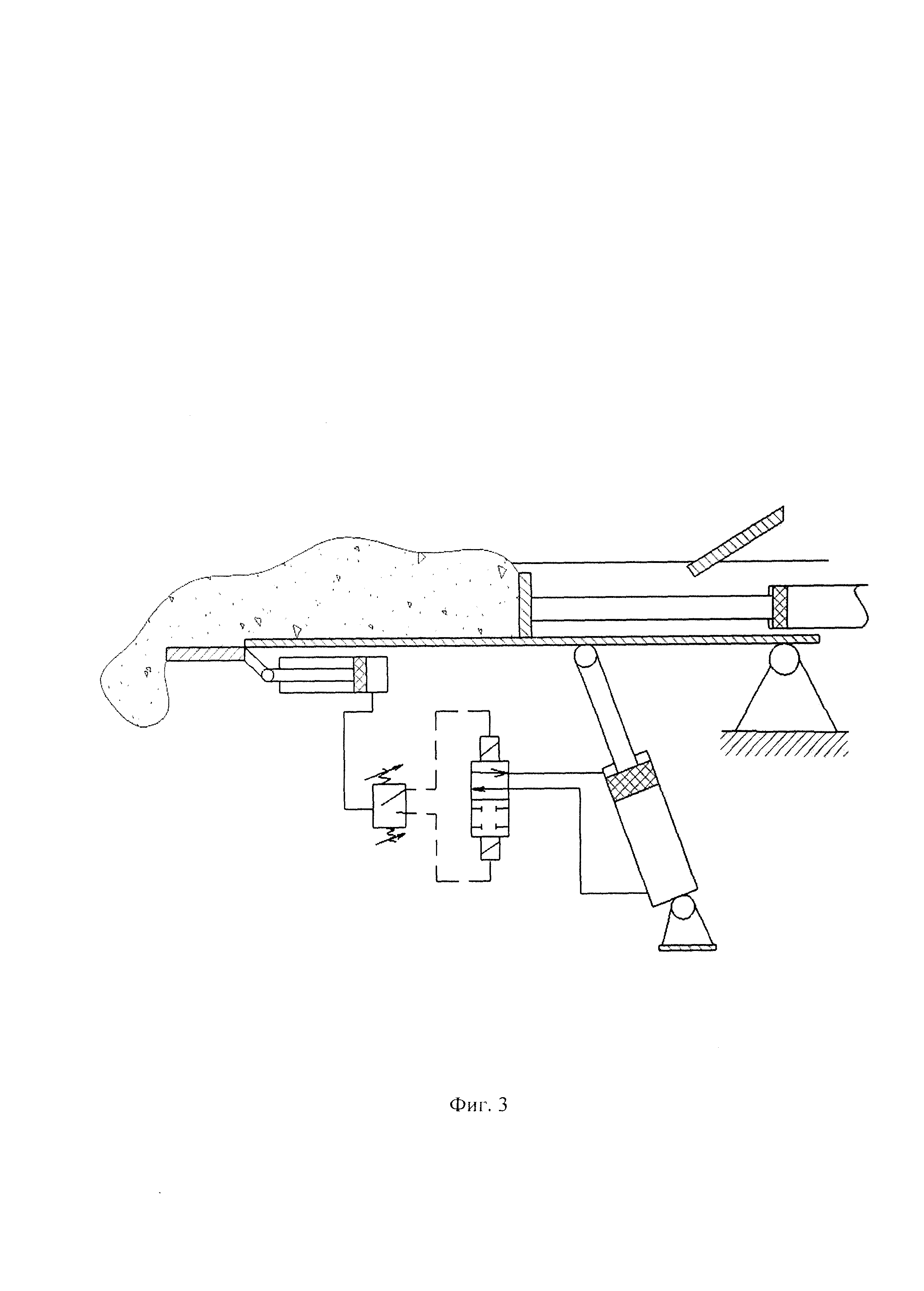
Конвейер работает следующим образом. Перед началом работы, силовые цилиндры 3 и 5 находятся в крайнем втянутом, а силовой цилиндр 7 - в крайнем выдвинутом положениях (фиг. 1), при этом желоб конвейера 2 расположен под углом относительно горизонта, а откидной борт 6 находится в вертикальном положении, препятствующем перемещению погружаемого материала вдоль желоба 2. При работе проходческой машины, транспортируемый материал попадает в желоб конвейера 2, и под действием сил гравитации перемещается по желобу в сторону откидного борта 6, кинематически связанного силовым цилиндром 7. При формировании некоторого объема материала в нижней части желоба, увеличивается нагрузка на откидной борт 6, передаваемая силовому цилиндру 7, кинематически связанному с откидным бортом 6, в полости которого формируется, и постепенно увеличивается избыточное давление, автоматически контролируемое датчиком давления 8. При достижении некоторого максимального значения давления настройки датчика давления 8, последний срабатывает, и передает соответствующий сигнал на распределитель 9. Распределитель 9 переключается и обеспечивает перемещение поршня силового цилиндра 3, а соответственно и желоба конвейера 2 вверх. При этом, угол наклона желоба 2 уменьшается, соответственно уменьшается сила давления материала на откидной борт 6 и, как следствие - давление в полости силового цилиндра 7. При достижении минимального значения давления настройки, датчик давления 8 срабатывая, обеспечивает переключение распределителя 9, что приводит к остановке поршня силового цилиндра 3 и желоба конвейера 2. Описанные процессы автоматического регулирования положения желоба конвейера 2 продолжаются до занятия последним горизонтального положения (фиг. 2), после чего процесс загрузки конвейера прекращается. Выгрузка транспортируемого материала в последующее транспортное средство осуществляется перемещением транспортирующего элемента 4 при помощи силового цилиндра 5, при этом откидной борт 6 под действием силового цилиндра 7 приводится в положение, не препятствующее грузопотоку (фиг. 3).
После полной разгрузки желоба конвейера 2, последний опускается в исходное положение при помощи цилиндра 3. Затем, процесс повторяется.
Таким образом, в данном техническом решении отсутствуют транспортирующие элементы, используемые для заполнения желоба материалом, что приводит к достижению поставленной цели.
Литература
1. Григорьев В.Н., Дьяков В.А., Пухов Ю.С. Транспортные машины для подземных разработок. - М.: Недра, 1984.
2. Техника и технология горноподготовительных работ в угольной промышленности / под ред. Нильвы Э.Э. - М.: Недра, 1991. - 315 с.
3. https://www.wika.ru/landingpage_contact_pressure_gauge_ru_ru.WIKA.
Реферат
Конвейер содержит став, желоб, транспортирующий элемент, откидной борт, силовые цилиндры и элементы управления приводом, в том числе распределители. Желоб соединен со ставом шарнирно, с возможностью изменения в процессе работы угла его наклона относительно горизонта посредством силового цилиндра подъема желоба, а полость цилиндра, кинематически связанного с откидным бортом, соединена с датчиком давления, подающим сигналы на распределитель, управляющий силовым цилиндром подъема желоба. Обеспечивается повышение производительности и эффективности транспортирования сыпучих и кусковых материалов. 3 ил.
Комментарии