Устройство контроля за синхронностью закрылков самолетного крыла - RU2475423C2
Код документа: RU2475423C2
Чертежи


Описание
Настоящее изобретение относится к устройству контроля за синхронностью одного или нескольких закрылков самолетных крыльев, при этом устройство содержит трос управления, соединенный с закрылками таким образом, что он совершает совместное движение с закрылками.
Для воздействия на подъемную силу и коэффициент лобового сопротивления самолетных крыльев самолеты оборудуются разными закрылками, изменяющими аэродинамические характеристики самолетных крыльев требуемым образом. В рамках настоящей заявки под понятием «закрылок» подразумевается любой элемент конструкции, который является подвижным по отношению к неподвижным элементам конструкции самолетного крыла и который воздействует на аэродинамические характеристики. Примерами могут служить предкрылки и посадочные щитки.
Например, необходимо, чтобы при взлете и посадке самолета его летные характеристики проявлялись постепенно, в то время как при полете на крейсерской скорости предкрылки и посадочные щитки находились в положении, при котором обеспечиваются скоростные летные характеристики. При эксплуатации может наступить нежелательный случай, когда в приводной системе закрылков возникают неисправности, которые в зависимости от своего характера могут вызвать перекос, дефекты ориентации или даже потерю отдельных закрылков или их элементов. Это связано с тем недостатком, что нежелательно ухудшаются аэродинамические свойства крыльев, например, из-за моментов крена или даже потери закрылков.
Для своевременного обнаружения таких нежелательных состояний известно применение механизма в виде троса управления для контроля за синхронностью закрылков системы обеспечения большой подъемной силы. Такие системы известны из US 5,680,124 и ЕР 0726201 А1. В этих известных из указанных источников системах концы троса управления закреплены на подвижных контролируемых закрылках. При нарушении движения одного или нескольких закрылков удлиняется путь между точками крепления, что может регистрироваться соответствующей сенсорной системой. Недостатком такой известной из уровня техники системы является то, что вследствие расположения точек крепления троса управления на закрылках весь сенсорный механизм должен совершать совместное движение с закрылками. Другой недостаток заключается в том, что в известных из уровня техники системах нарушения движений могут быть обнаружены только для двух смежных закрылков самолетного крыла. Применение известной системы становится невозможным, если на крыле имеется или должен контролироваться только один закрылок.
Наконец, недостатком является также то, что известной системой не могут контролироваться приводные механизмы на наружных и внутренних концах закрылков, т.е. самый наружный и самый внутренний из приводных механизмов, так как трос управления не доходит до места их расположения.
Поэтому в основу настоящего изобретения положена задача усовершенствования устройства контроля за синхронностью одного или нескольких закрылков самолетного крыла настолько, чтобы оно имело относительно простую конструкцию и обладало более широкой функциональностью по сравнению с известными из уровня техники системами.
Указанная задача решается с помощью устройства, признаки которого приведены в пункте 1 формулы изобретения. Предусмотрено, чтобы трасса прокладки троса управления проходила от первой точки к второй, причем одна из них или обе располагались на неподвижных элементах конструкции самолетного крыла. Такое выполнение контрольного устройства позволяет осуществлять контроль также и в том случае, когда на каждом самолетном крыле имеется или подлежит контролю только один закрылок. Кроме того, система может использоваться для контроля за концами закрылков на наружном и внутреннем краях крыла, так как трасса прокладки троса управления может также проходить по концам закрылков до неподвижных элементов конструкции. В этом отношении устройство согласно изобретению представляет собой функциональное усовершенствование по сравнению с известной контрольной системой, при этом степень сложности контрольного устройства не возрастает.
Другое преимущество достигается в результате того, что сенсорный элемент не должен обязательно располагаться на подвижном закрылке, что привело бы к недостатку, выражающемуся в том, что прокладка соответствующего необходимого электрического провода к сенсорному элементу не должна производиться по зазору с переменной шириной между неподвижными и подвижными элементами конструкции крыла.
Согласно другому варианту выполнения изобретения предусмотрено, чтобы на полукрыло, т.е. на половину размаха крыла, приходился один или даже несколько тросов управления. Если для полукрыла предусмотрено несколько тросов управления, то контроль может осуществляться за разными группами закрылков или также за разными отдельными закрылками раздельно друг от друга.
В другом варианте выполнения изобретения предусмотрено, чтобы трасса прокладки троса управления проходила таким образом, чтобы она располагалась от первой точки к другой через один или несколько закрылков так, чтобы ее длина в безаварийном режиме работы закрылков не зависела от их положения. Следовательно, возможно, чтобы длина трассы прокладки после уборки закрылков соответствовала или существенно соответствовала длине трассы прокладки после выпуска закрылков, в результате чего трос управления будет одинаково натянут в обоих положениях. Если же движение закрылка будет асинхронным, например, вследствие того, что один из приводных механизмов закрылка не работает или работает несоответствующим образом, то длина трассы прокладки изменится, вследствие чего трос управления либо натянется, либо ослабнет, что может быть преобразовано в электрический сигнал соответствующими сенсорными элементами, например выключателем, датчиком перемещения и пр., который активирует, например, механизмы безопасности системы. При этом возможно, например, образование сигнала, который вызовет остановку приводной системы, и/или в кабине самолета появится соответствующий тревожный сигнал.
Также возможно, чтобы длина трассы прокладки изменялась на определенную величину в безаварийном режиме работы закрылков при изменении их положения. И в этом случае возможна регистрация того, что при движении закрылков из одного положения в другое происходит изменение длины на названную определенную величину, которая может быть соответствующим образом измерена непосредственно или косвенно. Если это происходит, то, следовательно, можно сделать вывод о безаварийном режиме работы. Если же этого не происходит, то можно заключить, что имеет место повреждение, что, как уже указывалось, может привести к остановке системы и/или формированию тревожного сигнала.
В другом варианте выполнения изобретения предусмотрено, чтобы первая и вторая точки были смещены по отношению друг к другу в направлении движения закрылков. При этом возможно, например, чтобы одна из точек располагалась около или в зоне кромки самолетного крыла и чтобы другая из точек напротив была смещена назад от кромки самолетного крыла. Благодаря этому обеспечивается положение, при котором трасса прокладки троса управления не зависит от положения и движения закрылков, так как при выпуске закрылков трасса прокладки на одной стороне закрылков удлиняется на величину, на которую она уменьшается на их другой стороне.
В еще одном варианте выполнения изобретения предусмотрено, чтобы трос управления проходил по направляющим роликам, расположенным на боковых кромках закрылков. Также возможно, чтобы трос управления проходил по направляющим роликам, которые не располагаются на боковых кромках закрылков, а являются смещенными по отношению к ним.
Путем выбора расстояния между направляющими роликами и кромками закрылков можно задавать чувствительность срабатывания системы. Чем ближе к кромке закрылка располагаются направляющие ролики, тем интенсивнее воздействует асинхронное движение закрылков на длину трассы прокладки, т.е. тем выше чувствительность срабатывания устройства. Таким образом, посредством позиционирования направляющих роликов можно изменять чувствительность срабатывания. При этом возможно располагать направляющие ролики в разных положениях для регулировки индивидуальной чувствительности срабатывания.
В следующем варианте выполнения изобретения предусмотрено, чтобы трос управления проходил по всей или значительной части ширины закрылков.
В другом варианте выполнения изобретения предусмотрено, чтобы трос управления проходил по неподвижным элементам конструкции, таким, например, как опора силовой установки. В устройстве согласно настоящему изобретению применение такого расположения не исключается, напротив, оно позволяет и в этом случае регистрировать асинхронное движение одного или нескольких закрылков.
При этом может быть предусмотрено, чтобы трос управления проходил по направляющим роликам на неподвижных элементах конструкции. Такие направляющие ролики служат для расположения трассы прокладки троса управления вокруг неподвижного элемента конструкции.
Возможно, чтобы по обеим сторонам неподвижного элемента конструкции располагались закрылки, с которыми соединен или через которые проходит трос управления. Кроме того, может быть предусмотрено, чтобы направляющие ролики на неподвижном элементе конструкции располагались таким образом, чтобы длина трассы прокладки троса управления от одного смежного с неподвижным элементом конструкции закрылка до другого смежного с неподвижным элементом конструкции закрылка в безаварийном режиме работы закрылка не изменялась или изменялась на определенную величину. Также может быть предусмотрено, чтобы, по меньшей мере, два направляющих ролика на неподвижном элементе конструкции располагались со смещением по отношению друг к другу в направлении движения закрылков. Благодаря этому становится возможным, чтобы длина пути между одним из направляющих роликов на неподвижном элементе конструкции и направляющим роликом примыкающего закрылка увеличивалась или уменьшалась на величину, на которую уменьшается или увеличивается длина пути прокладки от другого ролика на неподвижном элементе конструкции до направляющего ролика смежного с ним закрылка. В целом обеспечивается положение, при котором трасса прокладки также и в случае применения направляющих роликов на неподвижных элементах конструкции не зависит от положения закрылков.
Другие детали и преимущества изобретения поясняются с помощью изображенного на чертеже примера выполнения. При этом изображено:
фиг.1 - расположение троса управления после уборки и выпуска закрылков,
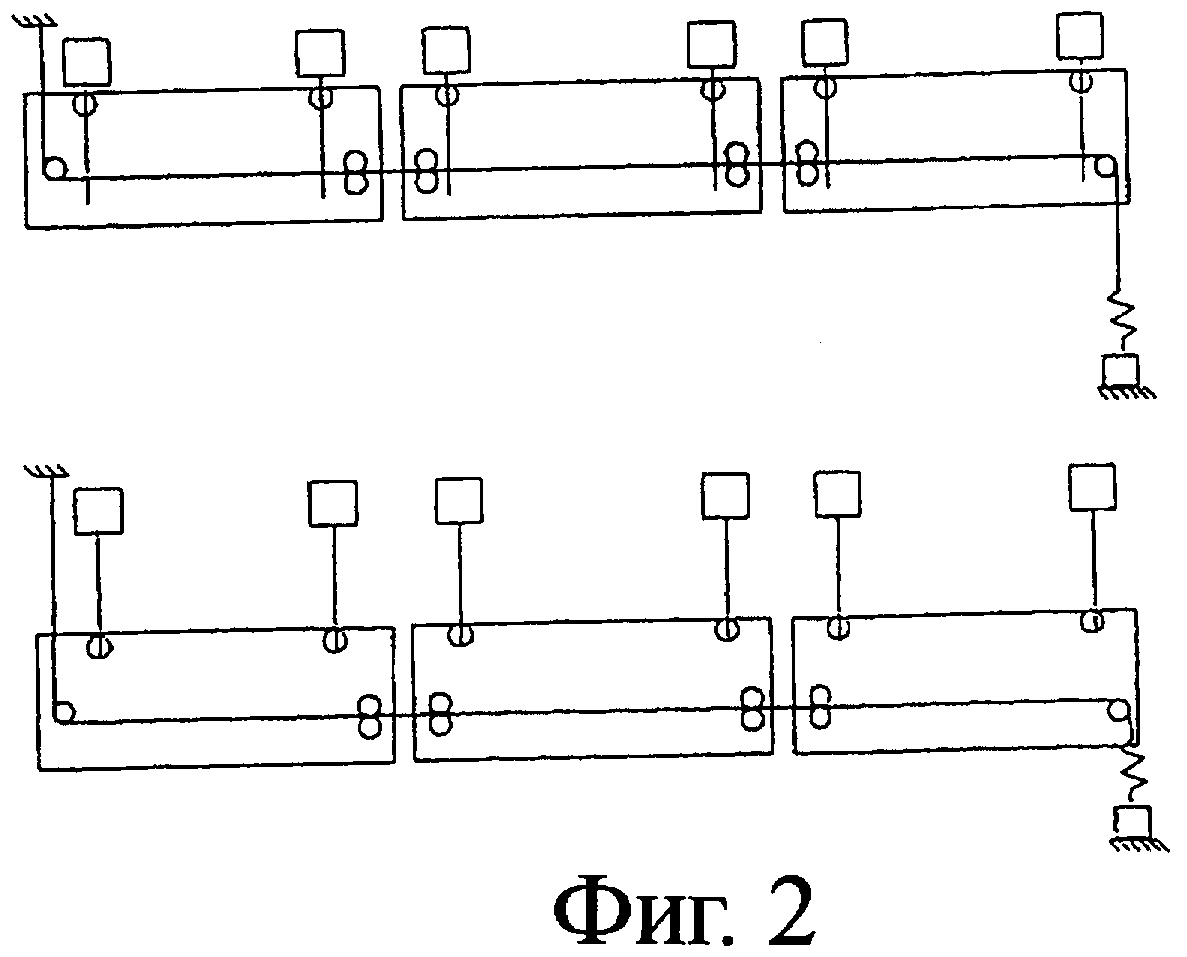
фиг.2 - упрощенное изображение расположения на фиг.1,
фиг.3 - расположение системы тросов управления при дефекте синхронизации закрылка при низкой чувствительности срабатывания,
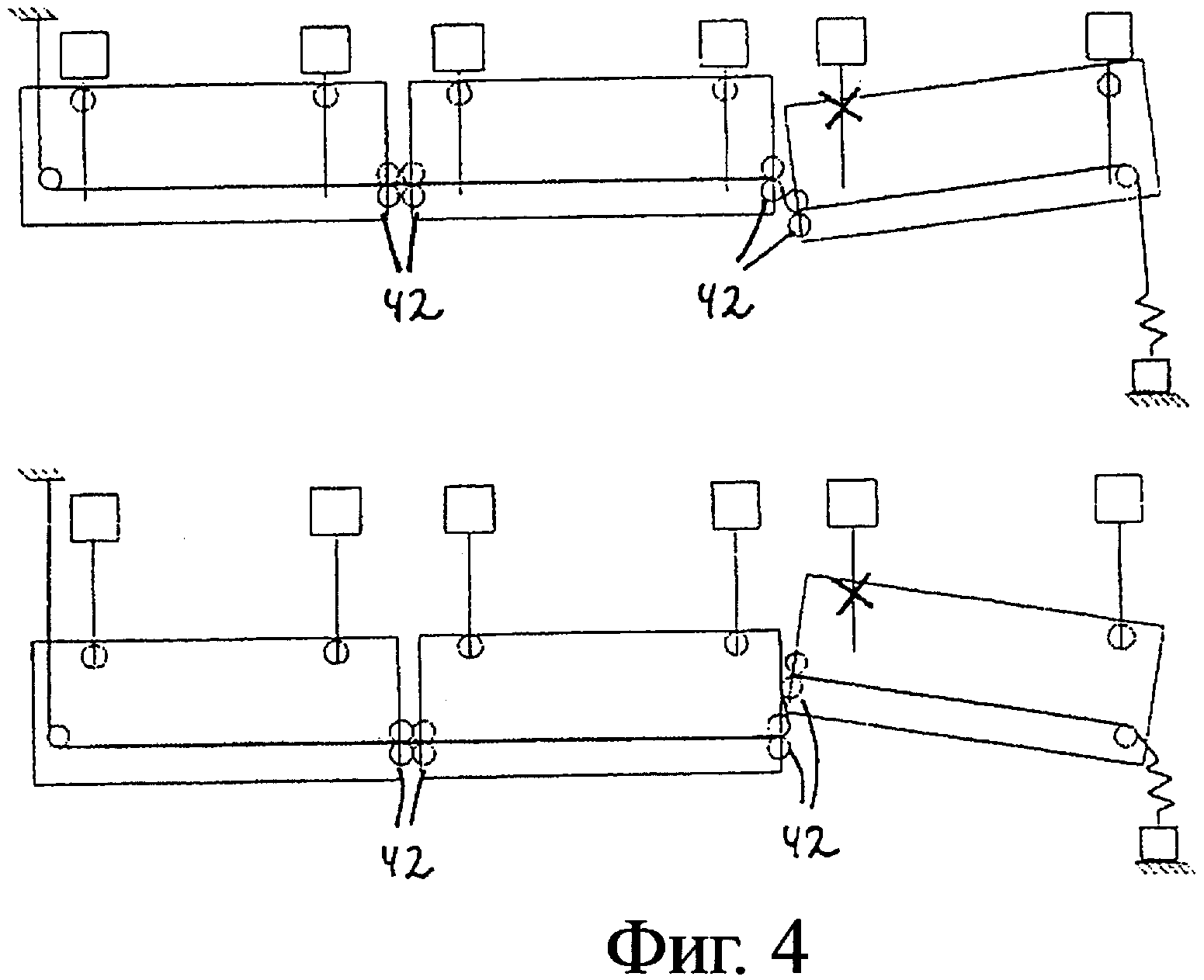
фиг.4 - расположение системы тросов управления при дефекте синхронизации закрылка при высокой чувствительности срабатывания,
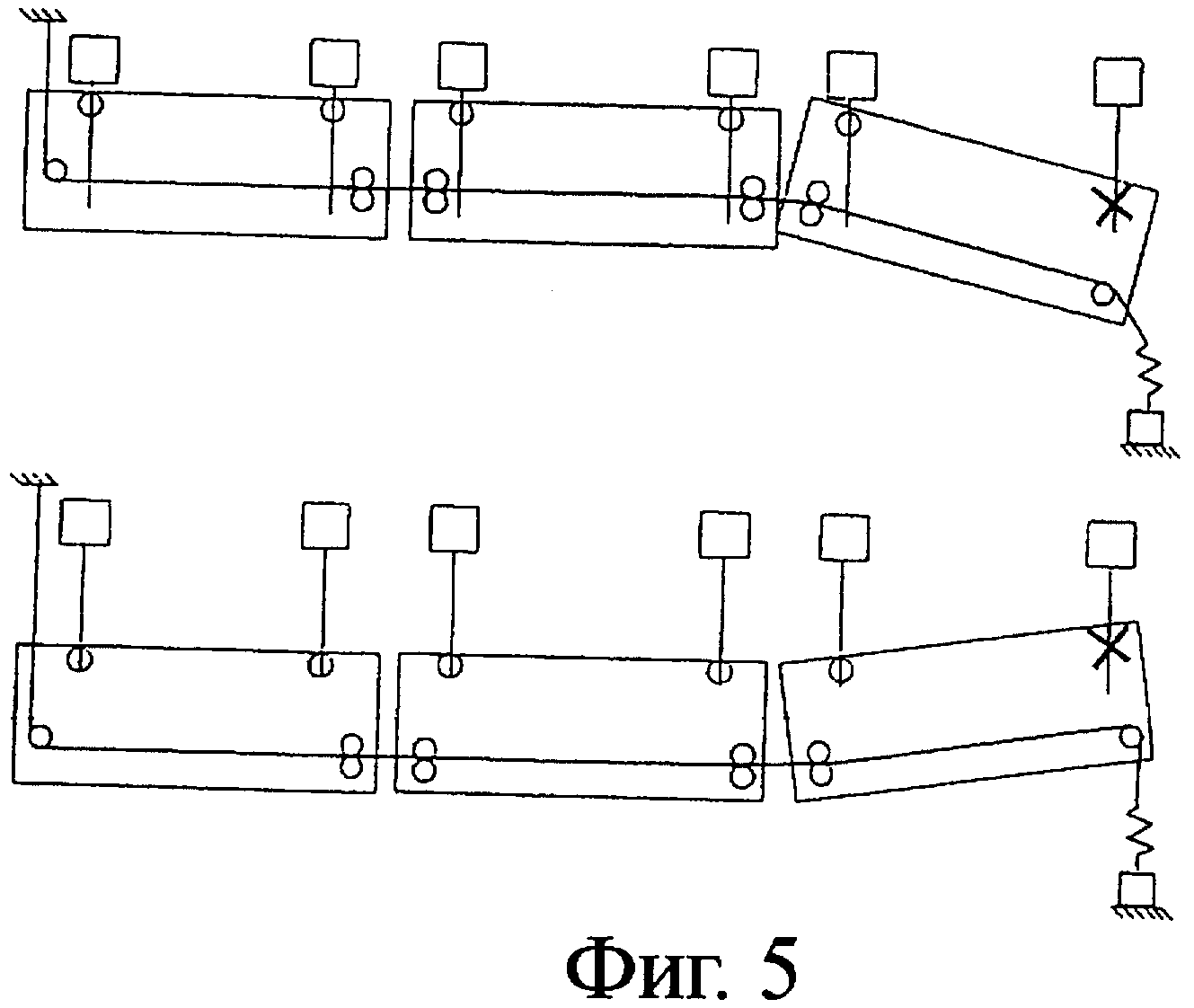
фиг.5 - расположение системы тросов управления при дефекте синхронизации на конце закрылка на стороне внутреннего края крыла при уборке/выпуске,
фиг.6 - расположение системы тросов управления над неподвижным элементом конструкции, например, опорой силовой установки.
На фиг.1 показаны три расположенных рядом закрылка 1, 2, 3, в качестве которых могут служить, например, предкрылки или посадочные щитки. Сверху на этой фигуре изображены закрылки 1, 2, 3 в положении уборки. Позицией 100 обозначен неподвижный элемент конструкции изображенного полукрыла самолета.
Трасса 10 прокладки троса управления лежит между точками 20, 30, расположенными неподвижно, т.е. на неподвижных элементах конструкции 100 самолетного крыла. Направляющие ролики 40 расположены на закрылках 1, 2, 3 и совершают совместное с ними движение.
Приводные узлы 50 для приведения в движение закрылков 1, 2, 3 в примере выполнения, показанном на фиг.1, представлены по два на закрылок.
Как показано также на фиг.1, трос 10 управления прочно закреплен в конечной точке 20 трассы прокладки. Другой конец троса 10 управления соединен через пружину 65 с другой конечной точкой 30 трассы прокладки. В результате этого длина трассы прокладки может изменяться в некоторых пределах. Если длина трассы прокладки изменяется, то это нагружает или разгружает пружину, что может измеряться соответствующими датчиками.
Как следует из фиг.1, на неподвижном элементе 100 конструкции полукрыла расположены два направляющих ролика 60, 60', один (60') из которых расположен в зоне кромки крыла, а другой (60) смещен назад по отношению к нему. В результате этого длина трассы прокладки не изменяется при выпуске закрылков (фиг.1, нижнее изображение), в результате чего натяжение пружины 65 остается постоянным.
На фиг.2 показано в упрощенном виде расположение согласно фиг.1, причем одинаковые или функционально одинаковые элементы обозначены теми же позициями, что и на фиг.1.
Если происходит нарушение синхронизации в работе одного или нескольких закрылков 1, 2, 3, то изменяется длина трассы прокладки и натяжение троса 10 управления и, следовательно, пружины 65, что соответствующим образом может быть измерено. На фиг.3 показано состояние, при котором нарушена синхронность изображенного справа закрылка при уборке и выпуске. В обоих случаях происходит - по сравнению с синхронным состоянием на фиг.1 и фиг.2 - удлинение трассы прокладки и, следовательно, увеличение упругой силы, которая является измеряемой.
В целях большей наглядности на фигурах 3, 4, 5 позиции опущены.
В примере выполнения, изображенном на фигурах 3, 4, все направляющие ролики расположены на закрылках, а не на неподвижных элементах конструкции крыла. Закрылки содержат на обращенных друг к другу концевых участках направляющие ролики, которые, как показано на фиг.3, расположены на некотором расстоянии от кромок закрылков. В результате достигается относительно малая чувствительность срабатывания, так как в меньшей степени изменяется длина трассы прокладки по сравнению с тем, когда соответствующие направляющие ролики располагаются непосредственно или близко к кромкам закрылок, как показано на фигуре. На этой фигуре также показан дефект синхронности изображенного справа закрылка при уборке и выпуске при высокой чувствительности срабатывания системы.
Вследствие того что согласно настоящему примеру выполнения, по меньшей мере, одна из конечных точек трассы прокладки расположена неподвижно, то возникает возможность для регистрации дефекта синхронности на конце закрылка. Такой пример выполнения показан на фиг.5, при котором приводной узел изображенного справа закрылка имеет неисправность. В показанном здесь примере выполнения неисправность находится на конце изображенного справа закрылка на стороне внутреннего края крыла при уборке и выпуске.
На фиг.6 изображен пример выполнения настоящего изобретения, при котором трос управления пропущен по направляющим роликам 80, 81, 82 на неподвижном элементе конструкции, например, над силовой установкой 110. На фиг.6 представлены расположенные на неподвижном элементе конструкции ролики 80, 81, 82. С обеих сторон силовой установки 110 располагаются закрылки 3, 4, при этом закрылок 4 находится на стороне внутреннего края полукрыла.
В этом примере выполнения конечные точки 20, 30 трассы прокладки троса 10 управления расположены неподвижно.
От обоих роликов 80, 82 на неподвижном элементе конструкции трос управления проходит до направляющего ролика 90, 91 соответственно смежного закрылка 3 или 4. При этом направляющие ролики 90, 91 расположены таким образом, что на стороне закрылка 3 при выпуске закрылков происходит увеличение расстояния между направляющим роликом 80 на неподвижном элементе конструкции и смежным направляющим роликом 90 смежного закрылка, а на стороне закрылка 4 происходит уменьшение расстояния между направляющим роликом 82 на неподвижном элементе конструкции и смежным направляющим роликом 91, как показано на фиг.6. В целом следует отметить, что при изображенном расположении длина трассы прокладки между обращенными друг к другу направляющими роликами 90, 91 над расположенными на неподвижном элементе конструкции направляющими роликами 80, 81, 82 закрылков 3, 4 остается постоянной в безаварийном режиме работы устройства.
В примере на фиг.6 в качестве неподвижного элемента конструкции показана силовая установка 110. Само собой разумеется, что изобретение не ограничивается ею. В качестве неподвижных элементов конструкции могут быть выполнены и другие стационарные элементы, например шасси или корпус крыла. В последнем случае система может проходить через фюзеляж к противолежащему полукрылу. Этим достигается минимальная степень сложности системы (трос и датчик для всего крыла) и, следовательно, максимальная надежность при низких затратах.
Реферат
Изобретение относится к области авиации. Устройство контроля за синхронностью одного или нескольких закрылков самолетных крыльев содержит трос управления, соединенный с закрылками таким образом, что он совершает совместное движение с закрылками. Трасса прокладки троса управления проходит от первой точки до второй, из которых одна точка или обе расположены на неподвижных элементах конструкции самолетного крыла. Изобретение направлено на упрощение конструкции. 14 з.п. ф-лы, 6 ил.
Формула
Документы, цитированные в отчёте о поиске
Система щитков на крыле самолета с жестким крылом
Комментарии