Система и способ доставки грузов - RU2756702C2
Код документа: RU2756702C2
Чертежи





Описание
Область техники
Изобретение относится к области техники воздушной доставки грузов и/или пассажиров на домашние станции с помощью летательных аппаратов, предпочтительно беспилотных, и, кроме того, касается оптимизированной системы и способа таких доставок при повышенной легкости и безопасности.
Уровень техники
В данной области техники остается потребность в улучшенной системе доставки, использующей (беспилотные) летательные аппараты (предпочтительно БПЛА) или беспилотники. В таких системах пункты доставки оборудованы стыковочной системой или узлом, что позволяет летательному аппарату приземлиться с грузом и подать его в стыковочную систему, которая затем передает груз получателю. Чаще всего такая стыковочная станция размещается на высоте, чтобы летательный аппарат мог легко добраться до нее, не создавая помех для окружающей среды, и с меньшим риском для самого летательного аппарата (меньше препятствий и/или легче обнаружить препятствие и соответствующим образом скорректировать курс). Сразу после передачи груза беспилотник может снова взлететь, в то время как стыковочная система перемещает отправление, например, посредством желоба или лифтового механизма, для его доставки получателю в удобное место (на первый этаж, в почтовый ящик ...).
Такие системы описаны во многих документах, например, в US 9387928, US 2016/159496, US 2016/257423, WO 2014/080389, WO 2017/072101, US 2015/158599 и ряде других. Первый из этих документов, например, описывает стыковочную станцию для беспилотников, которая размещается на возвышенных конструкциях, таких как столбы, которые создают сеть «зарядных станций» для более длительных полетов, а также могут оснащаться системой извлечения груза, которая могла бы забирать груз с беспилотника. Все остальные описывают подобные проекты.
Заявитель заметил, что все эти системы имеют общий недостаток, заключающийся в том, что большая часть оборудования подвергается воздействию суровых условий окружающей среды, а также практически недоступна для специалистов (для проведения ремонта, технического обслуживания, монтажа …), что значительно повышает сложность этих операций.
Кроме того, ни один из документов не описывает систему доставки, которая способна принимать груз от различных типов беспилотников, имеющих либо отделяемые грузовые модули, либо у которых грузовой модуль неотделим от самого летательного аппарата.
Настоящее изобретение направлено на решение по меньшей мере ряда проблем из упомянутых выше.
Краткое описание изобретения
Настоящее изобретение предлагает усовершенствованную систему для перевозки грузов и/или пассажиров, включающую одну или более домашних станций и один или более летательных аппаратов, предпочтительно беспилотных летательных аппаратов (БПЛА), для перевозки грузов и/или пассажиров, причем летательный аппарат имеет грузовой модуль (предпочтительно с возможностью отсоединения от летательного аппарата, а более предпочтительно с грузовым модулем с возможностью отсоединения от рамы, которая сама находится в летательном аппарате), выполненный с возможностью удержания груза и/или пассажиров в одном или более грузовых отсеках грузового модуля; домашняя станция включает стыковочную станцию на высоте для стыковки одного или более летательных аппаратов, и, кроме того, оснащена приемной станцией для приема груза и/или пассажиров, которая удалена от стыковочной станции на некоторое расстояние и включает средство транспортировки, соединяющее стыковочную станцию и приемную станцию, а стыковочная станция при этом обладает возможностью физического сцепления и надежного удержания летательного аппарата, причем стыковочная станция предпочтительно имеет возможность последующего физического сцепления с грузовым модулем, а приемная станция включает приемник для груза и/или пассажиров, который приспособлен для выгрузки по меньшей мере части груза и/или пассажиров из грузового модуля в приемник, когда указанный грузовой модуль транспортируется на приемную станцию, и при этом средство транспортировки способно транспортировать грузовой модуль летательного аппарата между стыковочной и приемной станциями.
Во втором аспекте настоящее изобретение обеспечивает способ транспортировки груза и/или пассажиров с помощью летательного аппарата, предпочтительно беспилотного летательного аппарата (БПЛА), от и до домашней станции, причем летательный аппарат содержит грузовой модуль, предпочтительно с возможностью отсоединения от летательного аппарата, выполненный с возможностью удержания груза и/или пассажиров в одном или более грузовых отсеках грузового модуля; домашняя станция включает стыковочную станцию на высоте для стыковки одного или более летательных аппаратов, и, кроме того, оснащена приемной станцией для приема груза и/или пассажиров, которая удалена от стыковочной станции на некоторое расстояние; способ предусматривает следующие этапы:
летательный аппарат приближается к домашней станции, предпочтительно используя бортовую навигационную систему;
стыковка летательного аппарата со стыковочной станцией посредством:
физического сцепления и надежного удержания летательного аппарата; и
последующего физического сцепления с грузовым модулем и/или со сцепленным летательным аппаратом;
транспортирование по меньшей мере сцепленного грузового модуля сцепленного летательного аппарата от стыковочной к приемной станции;
перемещение груза и/или пассажиров соответственно в грузовой модуль с приемной станции или из грузового модуля на приемную станцию; а также
транспортирование по меньшей мере сцепленного грузового модуля сцепленного летательного аппарата от приемной к стыковочной станции.
В соответствии с вариантом осуществления изобретения способ особенно подходит для доставки посылок на дом, особенно в густонаселенных районах. Посылки могут различаться и включать лекарства, продукты питания, электронику, газеты или другие печатные издания и т. д...
Краткое описание чертежей
Фиг. 1A–1B показывают летательный аппарат, состыкованный с домашней станцией в соответствии с вариантом осуществления изобретения.
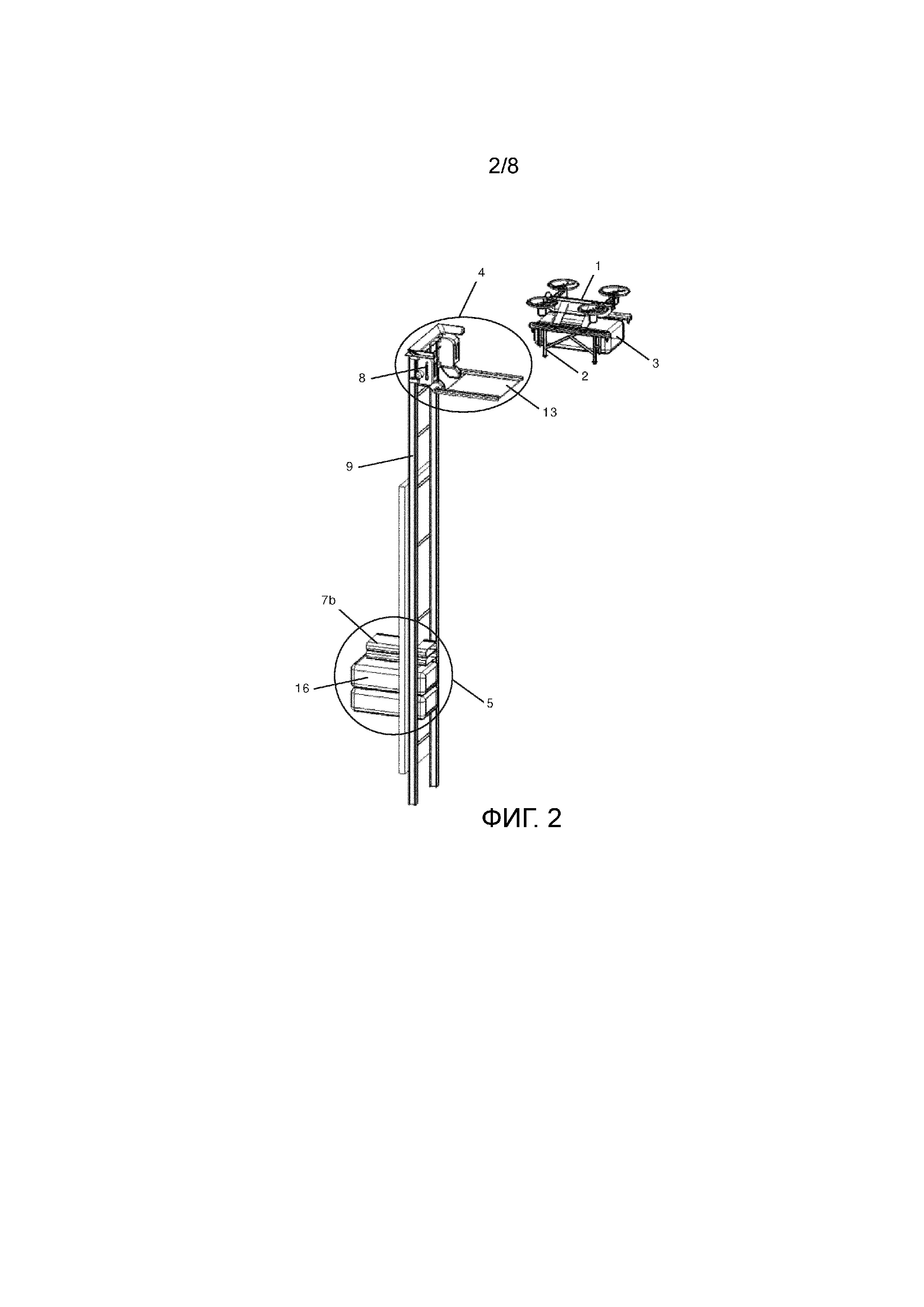
Фиг. 2 показывает летательный аппарат вблизи стыковочной станции на домашней станции в соответствии с вариантом осуществления изобретения.
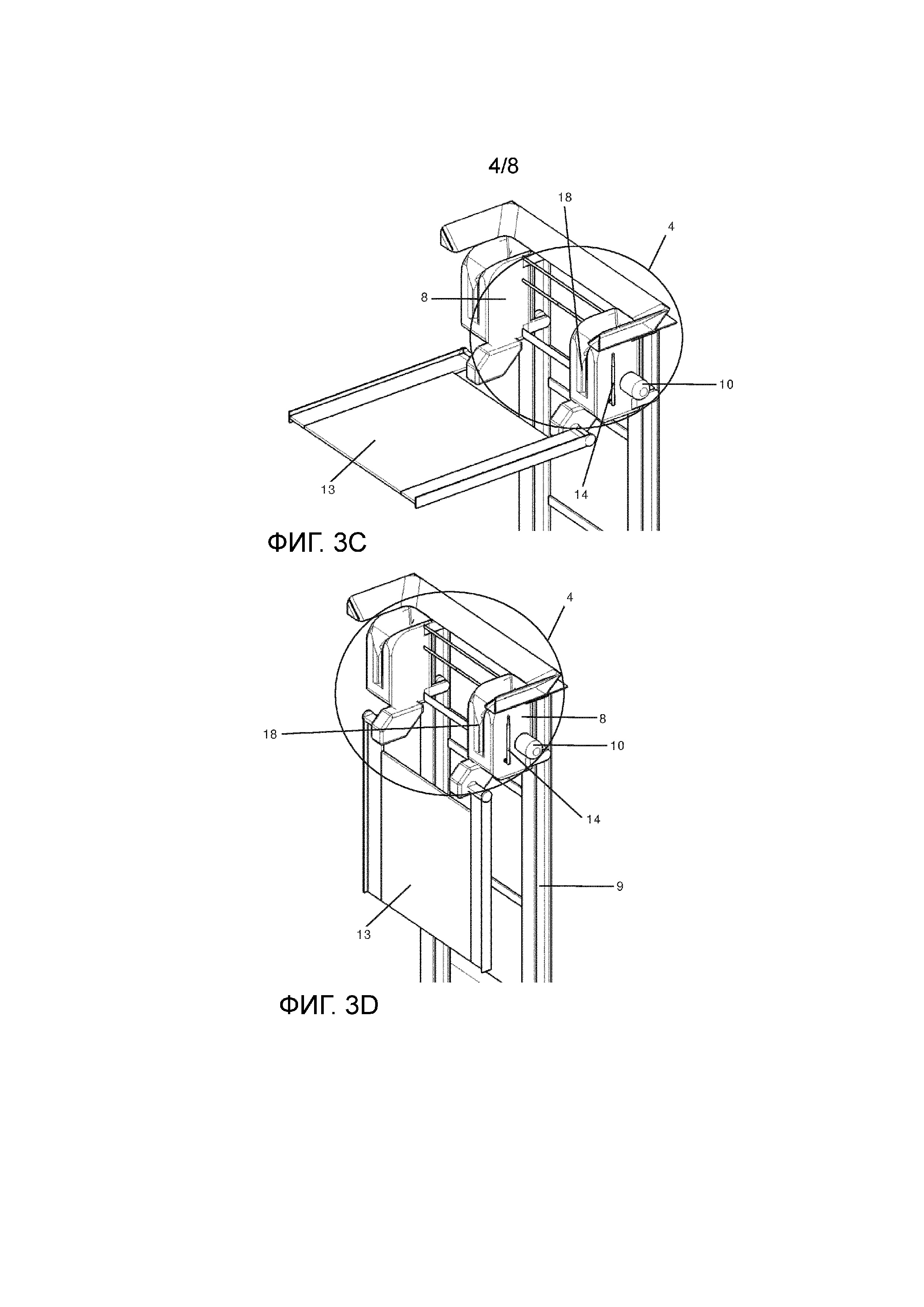
Фиг. 3A, 3B, 3C и 3D подробно показывают состыкованный летательный аппарат в соответствии с вариантом осуществления изобретения.
Фиг. 4A, 4B, 4C и 4D показывают возможные конструкции грузового модуля летательного аппарата и отсеки указанного грузового модуля в соответствии с вариантом осуществления изобретения.
Фиг. 5 подробно показывает отсоединенную раму и грузовой модуль в соответствии с вариантом осуществления изобретения.
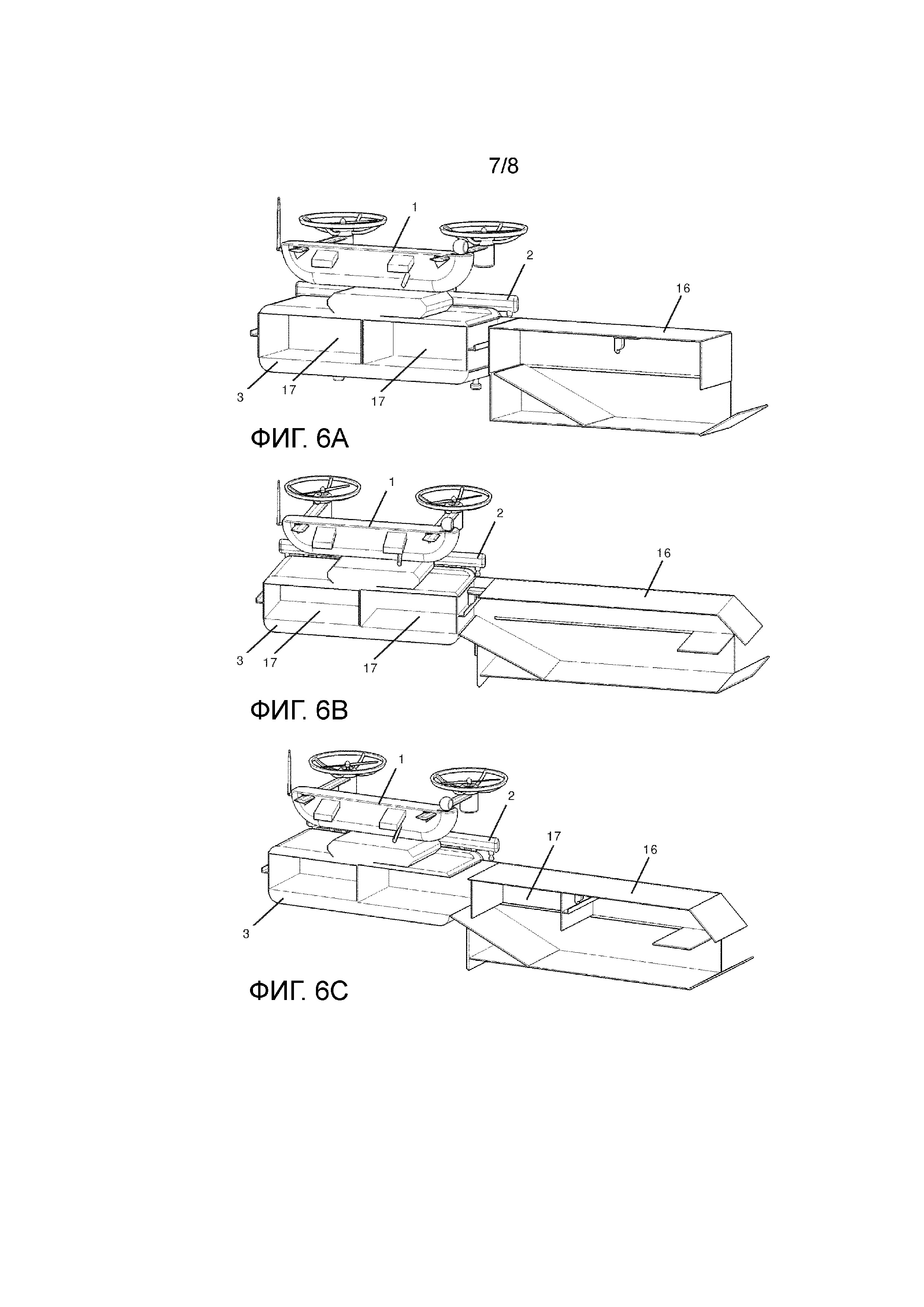
Фиг. 6A, 6B, 6C и 6D показывают возможный способ выгрузки груза из грузового модуля на домашней станции в соответствии с вариантом осуществления изобретения.
Фиг. 7 показывает конструкцию изобретения, где грузовой модуль может отсоединяться от БПЛА и перемещаться между стыковочной и приемной станциями.
Подробное описание изобретения
Настоящее изобретение относится к усовершенствованной системе и способу перевозки грузов посредством (беспилотных летательных) аппаратов (предпочтительно БПЛА).
Если не указано иное, все термины, используемые при раскрытии изобретения, включая технические и научные термины, имеют значение, общепринятое для специалиста в области техники, к которой относится это изобретение. Посредством дополнительного руководства представлены определения терминов для лучшего пониманиям концепции настоящего изобретения.
Используемые здесь следующие термины имеют такие значения:
Термины, используемые в данном документе, относятся как к единственному, так и к множественному числам, если контекстом явно не подразумевается иное. Например, «отсек» относится к одному или более отсекам.
Термин «примерно», который относится к измеряемому значению, такому как параметр, количество, временной промежуток и тому подобное, предназначен для охвата диапазона ± 20% или менее, предпочтительно ± 10% или менее, более предпочтительно ± 5% или менее, еще более предпочтительно ± 1% или менее и еще более предпочтительно ± 0,1% или менее от указанного значения, если такие диапазоны целесообразны в раскрытом изобретении. Однако следует понимать, что значение, к которому относится слово «примерно», само по себе также конкретно раскрыто.
«Содержать», «содержащий» и «содержит» используются здесь в качестве синонимов «включать», «включающий», «включает», «состоит из», «оснащен», и являются всеобъемлющими или неограничивающими терминами, которые определяют наличие того, что следует далее, например, компонента, и не исключают наличие дополнительных, не перечисленных компонентов, признаков, элементов, частей, этапов, известных в данной области техники или раскрытых здесь.
Следует отметить, что одно или более следующих определений могут применяться частично или полностью к терминам, используемым в раскрытых примерах осуществления изобретения.
Термин «летательный аппарат» относится к судну, способному к перемещению в воздухе, предпочтительно с повышенной маневренностью и точностью. Летательный аппарат может пилотироваться находящимся на борту пилотом, но также может управляться дистанционно и использоваться для различных видов перевозок, от товаров и продуктов до пассажиров и/или животных.
Термин «беспилотный летательный аппарат», «БПЛА» или «беспилотник» указывает на конкретную версию ранее определенного летательного аппарата и относится к судну, способному к перемещению в воздухе и специально адаптированному для повышенной маневренности (например, для передвижения в населенных районах) и точности. Такие суда предпочтительно управляются автоматизированной системой, хотя пилот также может управлять ими (или принимать управление от автоматизированной системы). Особо следует отметить, что суда способны зависать в определенном месте и способны к совершению небольших перемещений, что обеспечивает оптимальную подвижность судов и делает их особенно полезными для таких целей, как доставка грузов в населенных районах (или районах с развитой инфраструктурой, домами и т. д.). Кроме того, следует учитывать, что, хотя БПЛА, как правило, не имеют пилота на борту, они, тем не менее, могут брать на борт пассажиров. Таким образом, БПЛА может выполнять роль транспорта для людей и/или животных.
Следует отметить, что в дальнейшем термин «летательный аппарат» в конкретном варианте осуществления описанного, можно понимать как БПЛА.
Термин «домашняя станция» относится ко всей системе доставки грузов (БП)ЛА, которая включает в себя одну или более стыковочных станций для посадки и стыковки летательных аппаратов судов, а также отдельную приемную станцию (или более приемных станций) для выгрузки груза из летательного аппарата, и средством транспортировки, соединяющей стыковочную и приемную станции. Как правило, стыковочная станция будет располагаться в выдвинутом положении по отношению к инфраструктуре, например, снаружи жилого дома на крыше или подвешена к внешним стенам на высоте, поскольку это обеспечит легкий доступ летательным аппаратам. Приемная станция предпочтительно будет подключена к системе «почтового ящика» (или даже интегрирована в нее), чтобы потребители могли затем забрать груз.
Термин «стыковочная станция» относится к станции, на которую летательные аппараты могут «приземляться» и стыковаться. Таким образом, стыковочная станция может включать одну или более посадочных платформ, но может и просто иметь зажимной механизм для захвата и «подтягивания» летательного аппарата, который приближается к нему. Как правило, средства стыковки будут интегрированы для надежной фиксации летательного аппарата после его посадки (и, возможно, для выполнения других действий, например, зарядки летательного аппарата или связи с летательным аппаратом).
Термин «приемная станция» относится к системе выгрузки (или погрузки), которая приспособлена для выгрузки груза из грузового модуля летательного аппарата (или загрузки в него). Это может осуществляться роботизированными рычагами, которые могут извлекать груз, или путем наклона грузового модуля, чтобы позволить грузу выскользнуть, или посредством извлечения отсеков грузового модуля.
Термин «приемник» означает контейнер, в который груз может быть помещен после выгрузки из летательного аппарата для последующей выдачи соответствующему получателю.
Термин «средство транспортировки» относится к системе, которая соединяет стыковочную и приемную станции и, в частности, транспортирует грузовой модуль (и, возможно, раму и/или даже сам летательный аппарат) между двумя станциями. В их вариантах осуществления существует множество возможностей, например, они могут представлять собой направляющие с системой подъема, желобом, салазками или даже конвейерной лентой, но таковые не ограничены вышеупомянутыми вариантами.
Термины «подвижное средство сцепления» или «средство сцепления грузового модуля» эквивалентны и относятся к устройству, которое соединяется (по меньшей мере) с грузовым модулем (возможно, путем соединения с рамой, которая его удерживает, или даже с летательным аппаратом, удерживающим раму с грузовым модулем) и перемещает грузовой модуль между стыковочной и приемной станциями. Это может быть просто подъемное устройство с электроприводом, которое перемещается по направляющим или тросам, сохраняя соединение с грузовым модулем.
Термин «средство сцепления с летательным аппаратом» относится к устройству, которое соединяется с летательным аппаратом, но не напрямую с беспилотником или рамой (если имеется рама). Следует отметить, что это средство сцепления с летательным аппаратом перемещается отдельно от средства сцепления грузового модуля (но, конечно же, может перемещаться и вместе с указанным средством сцепления грузового модуля).
Термин «рама» относится к удерживающей конструкции, приспособленной для размещения грузового модуля и предпочтительно для защиты этого модуля от внешних помех. Рама может представлять собой фактически закрытый контейнер, предпочтительно в виде каркаса, который имеет преимущество в том, что он легкий и крепкий, и его легко можно передвигать или закреплять, например, с помощью зажимов. Следует отметить, однако, что понятие «рама» не является обязательным и что грузовой модуль может быть прикреплен непосредственно к летательному аппарату или просто иметь собственную защитную раму. Однако в некоторых вариантах осуществления предпочтительно предусмотреть раму, специально приспособленную для летательного аппарата для обеспечения сцепления между летательным аппаратом и контейнером.
Термин «грузовой модуль» относится к контейнеру, приспособленному для размещения в нем груза и/или пассажиров. Таким образом, грузовой модуль может быть выполнен во многих формах и размерах (для размещения разных форм, размеров и количества груза и/или пассажиров).
Термин «груз» можно интерпретировать в широком смысле как включающий в себя как товары, материалы, изделия, багаж, так и скот, а также пассажиров. В частности, груз будет в первую очередь подразумевать товары, материалы, изделия, багаж, особенно, когда упоминается в сочетании с термином «пассажир(ы)».
Перечисление числовых диапазонов по предельным значениям включает все числа и дроби, включенные в этот диапазон, а также перечисленные предельные значения.
В первичном аспекте изобретение относится к системе для перевозки грузов и/или пассажиров, включающей одну или более домашних станций и один или более летательных аппаратов, предпочтительно беспилотных летательных аппаратов (БПЛА), для перевозки грузов и/или пассажиров, причем летательный аппарат имеет грузовой модуль, выполненный с возможностью удержания груза и/или пассажиров в одном или более грузовых отсеках грузового модуля. Домашняя станция включает стыковочную станцию для стыковки одного или более летательных аппаратов и, кроме того, оснащена приемной станцией для приема груза и/или пассажиров, которая удалена от стыковочной станции на некоторое расстояние и включает средство транспортировки, соединяющее стыковочную станцию и приемную станцию. Стыковочная станция обладает возможностью физического сцепления и надежного удержания летательного аппарата, причем стыковочная станция оснащена средством сцепления с летательным аппаратом для, предпочтительно последующего, сцепления летательного аппарата со стыковочной станцией, причем это сцепление не с грузовым модулем, и при этом стыковочная станция обладает возможностью физического сцепления с грузовым модулем сцепленного летательного аппарата, а стыковочная станция включает средства сцепления грузового модуля для сцепления с грузовым модулем со стыковочной станцией; средство сцепления грузового модуля имеет возможность перемещения независимо от средства сцепления с летательным аппаратом, а упомянутое средство сцепления грузового модуля обладает возможностью снимать грузовой модуль с летательного аппарата и прикреплять обратно. Стыковочная станция обладает возможностью физического сцепления и надежного удержания летательного аппарата, причем стыковочная станция оснащена средством сцепления с летательным аппаратом для, предпочтительно последующего, сцепления летательного аппарата со стыковочной станцией, причем это сцепление не с грузовым модулем, и при этом стыковочная станция обладает возможностью физического сцепления с грузовым модулем сцепленного летательного аппарата, а стыковочная станция включает средства сцепления грузового модуля для сцепления грузового модуля со стыковочной станцией; средство сцепления грузового модуля имеет возможность перемещения независимо от средства сцепления с летательным аппаратом, а упомянутое средство сцепления грузового модуля обладает возможностью снимать грузовой модуль с летательного аппарата и прикреплять обратно. Средство транспортировки приспособлено для перемещения средства сцепления грузового модуля и сцепленного грузового модуля, снятого со сцепленного летательного аппарата, который, в свою очередь, остается неподвижным, между стыковочной и приемной станциями, если грузовой модуль отделяем от летательного аппарата; либо средство транспортировки приспособлено для совместного перемещения средства сцепления грузового модуля и средства сцепления летательного аппарата между стыковочной и приемной станциями, если грузовой модуль неотделим от летательного аппарата.
В предпочтительном варианте осуществления летательный аппарат оснащен рамой для удержания грузового модуля, средство сцепления грузового модуля обладает возможностью сцепления с указанной рамой, причем средство сцепления грузового модуля приспособлено для отсоединения и присоединения рамы, удерживающей грузовой модуль, от летательного аппарата и к нему.
Кроме того, следует отметить, что отсоединение грузового модуля, если возможно, (с рамой или без рамы) может быть осуществлено посредством физического действия (например, средство сцепления грузового модуля выполняет предварительно определенное движение – наклон, поворот, перемещение и т.д., или сочетание двух или более действий) во время или после сцепления для отсоединения грузового модуля от летательного аппарата, либо, возможно, посредством автоматического сигнала, посылаемого стыковочной станцией на летательный аппарат/грузовой модуль, когда средство сцепления грузового модуля «подтверждает» факт сцепления, за чем следует отделение грузового модуля. Второе действие может быть осуществлено посредством сигнала от стыковочной станции к летательному аппарату, который дает команду летательному аппарату отсоединить свой грузовой модуль, таким образом передавая его средству сцепления грузового модуля.
Во втором аспекте изобретение касается способа транспортировки груза и/или пассажиров с помощью летательного аппарата, предпочтительно беспилотного летательного аппарата (БПЛА), от и до домашней станции, причем летательный аппарат содержит грузовой модуль, предпочтительно с возможностью отсоединения от летательного аппарата, выполненный с возможностью удержания груза и/или пассажиров в одном или более грузовых отсеках грузового модуля; домашняя станция включает стыковочную станцию на высоте для стыковки одного или более летательных аппаратов, и, кроме того, оснащена приемной станцией для приема груза и/или пассажиров, которая удалена от стыковочной станции на некоторое расстояние; способ предусматривает следующие этапы:
приближение летательного аппарата к домашней станции;
стыковка летательного аппарата со стыковочной станцией посредством:
физического сцепления и надежного удержания летательного аппарата; и
физического сцепления с грузовым модулем сцепленного летательного аппарата;
характерным является то, что способ предусматривает такой этап:
определение, является ли грузовой модуль отделяемым от указанного сцепленного летательного аппарата;
в случае, когда грузовой модуль отделяется от летательного аппарата, способ далее предусматривает следующие этапы:
отделение грузового модуля от летательного аппарата;
транспортирование сцепленного грузового модуля сцепленного летательного аппарата от стыковочной к приемной станции;
перемещение груза и/или пассажиров соответственно в грузовой модуль с приемной станции или из грузового модуля на приемную станцию;
и, возможно, перемещение сцепленного грузового модуля сцепленного летательного аппарата от приемной к стыковочной станции;
в случае, когда грузовой модуль неотделим от летательного аппарата, способ предусматривает следующие этапы:
транспортирование сцепленного грузового модуля и сцепленного летательного аппарата от стыковочной к приемной станции;
перемещение груза и/или пассажиров соответственно в грузовой модуль с приемной станции или из грузового модуля на приемную станцию;
и, возможно, перемещение сцепленного грузового модуля и сцепленного летательного аппарата от приемной к стыковочной станции.
В предпочтительном варианте осуществления домашняя станция включает средство сцепления грузового модуля, а в случае отделяемого от летательного аппарата грузового модуля способ предусматривает следующий этап:
перемещение сцепленного грузового модуля сцепленного летательного аппарата от приемной к стыковочной станции;
и последующее присоединение грузового модуля к летательному аппарату;
в результате средство сцепления грузового модуля транспортирует грузовой модуль между стыковочной и приемной станциями.
Стоит отметить, что в возможном варианте осуществления этап ii. физического сцепления с грузовым модулем сцепленного летательного аппарата выполняется только в случае отделяемого от летательного аппарата грузового модуля. В этом случае после определения типа летательного аппарата (отделяемый модуль или нет) средство сцепления грузового модуля осуществляет сцепление, чтобы грузовой модуль мог быть отделен от летательного аппарата и передан на приемную станцию.
Далее в предпочтительном варианте осуществления летательный аппарат включает раму для удерживания грузового модуля, таким образом средство сцепления грузового модуля обладает возможностью зацепления рамы, удерживающей грузовой модуль, а этап отделения грузового модуля от летательного аппарата осуществляется путем отделения рамы, удерживающей грузовой модуль, от летательного аппарата, а этап присоединения грузового модуля к летательному аппарату осуществляется путем присоединения рамы, удерживающей грузовой модуль, к летательному аппарату, при этом средство сцепления грузового модуля транспортирует раму, удерживающую грузовой модуль, между стыковочной и приемной станциями.
Универсальность изложенной выше концепции в сравнении с другими известными системами заключается в том, что она позволяет летательным аппаратам всех видов взаимодействовать с системой доставки, поэтому гораздо большая доля имеющихся беспилотников может доставлять и забирать грузы (и/или пассажиров) с этой системой доставки. Большинство систем адаптированы для работы с определенным типом беспилотников, что ограничивает их «клиентуру». Многие системы, например, настроены на прием беспилотника в целом и наклоняют весь беспилотник для извлечения груза из его грузового модуля. Система, представленная в изобретении, позволяет беспилотникам с отделяемыми грузовыми модулями оставаться на стыковочной станции в то время, как только грузовой модуль отделяется и опустошается/обрабатывается. Это позволяет присоединить к «припаркованному» беспилотнику другой готовый к перевозке грузовой модуль (например, который уже был опустошен ранее или находится в резерве), что ускоряет процесс, поскольку беспилотнику больше не нужно дожидаться собственного грузового модуля. В качестве альтернативы, он может даже полностью оставить свой грузовой модуль и просто полететь к следующему пункту. Если беспилотник другой модели и его грузовой модуль не отделяется, то система достаточно гибкая и может транспортировать весь беспилотник к приемнику, где происходит извлечение груза, а затем беспилотник снова транспортируется наверх, откуда он может взлететь. Ни одна из систем предшествующего уровня техники не позволяет такую универсальную работу с двумя типами летательных аппаратов. Таким образом, преимущество заключается в том, что принимаются оба типа летательных аппаратов, но беспилотники с отделяемым грузовым модулем обрабатываются быстрее: они приземляются, оставляют свой грузовой модуль и забирают «ожидающий» грузовой модуль (или взлетают без нового грузового модуля), не дожидаясь возвращения своего грузового модуля с разгрузки, то есть раньше освобождают стыковочную станцию и быстрее готовы к дальнейшему использованию (что еще и экономит заряд аккумуляторов). Изобретение в наиболее предпочтительном варианте осуществления позиционируется в первичном аспекте так, что формируются (или могут формироваться) два отдельных сцепления для летательного аппарата и грузового модуля с домашней станцией.
В возможном варианте осуществления летательный аппарат оснащается особой рамой, удерживающей грузовой модуль, а также способной соединяться со средством сцепления грузового модуля. Рама специально приспособлена для закрепления на летательном аппарате, например, с помощью одного или более зажимов либо других крепежных средств. Предпочтительно, чтобы указанными зажимами или крепежными средствами можно было управлять при соединении со средством сцепления грузового модуля (проводным или беспроводным способом), чтобы присоединяться к летательному аппарату или отделяться от него. Преимущество такой специально адаптированной рамы состоит в том, что она совместима со всеми типами беспилотников, благодаря гибкости средств крепления (подвижные крепежные системы или иные средства). Еще одним преимуществом является то, что сменные рамы позволяют грузовым модулям использоваться на разных летательных аппаратах и не заставляют их ожидать их собственной рамы и грузового модуля (как упомянуто ранее).
В третьем аспекте изобретение относится к системе для перевозки грузов и/или пассажиров, включающей одну или более домашних станций и один или более летательных аппаратов, предпочтительно беспилотных летательных аппаратов (БПЛА), для перевозки грузов и/или пассажиров, причем летательный аппарат имеет грузовой модуль, предпочтительно с возможностью отсоединения от летательного аппарата, выполненный с возможностью удержания груза и/или пассажиров в одном или более грузовых отсеках грузового модуля. Домашняя станция включает стыковочную станцию для стыковки одного или более летательных аппаратов, и, кроме того, оснащена приемной станцией для приема груза и/или пассажиров, которая удалена от стыковочной станции на некоторое расстояние и включает средство транспортировки, соединяющее стыковочную станцию и приемную станцию, а стыковочная станция при этом обладает возможностью физического сцепления и надежного удержания летательного аппарата, причем стыковочная станция предпочтительно имеет возможность последующего физического сцепления с грузовым модулем сцепленного летательного аппарата, а приемная станция включает приемник для груза и/или пассажиров, который приспособлен для выгрузки по меньшей мере части груза и/или пассажиров из грузового модуля в приемник, когда указанный грузовой модуль транспортируется на приемную станцию, и при этом средство транспортировки способно транспортировать грузовой модуль летательного аппарата между стыковочной и приемной станциями; сам грузовой модуль включает по меньшей мере один отсек для удержания по меньшей мере части груза и/или пассажиров, причем указанный отсек не имеет нижней стенки, дополнительно имеет ручку и может выдвигаться из грузового модуля, а приемник оснащен крюковым механизмом для зацепления отсека за ручку и приспособлен для перемещения сцепленного отсека между грузовым модулем и приемником через отверстие в указанном приемнике, причем приемник имеет открытую нижнюю секцию, которая расположена ниже отверстия приемника.
В четвертом аспекте изобретение касается способа транспортировки груза и/или пассажиров с помощью летательного аппарата, предпочтительно беспилотного летательного аппарата (БПЛА), от и до домашней станции, причем летательный аппарат содержит грузовой модуль, предпочтительно с возможностью отсоединения от летательного аппарата, выполненный с возможностью удержания груза и/или пассажиров в одном или более грузовых отсеках грузового модуля; домашняя станция включает стыковочную станцию для стыковки одного или более летательных аппаратов, и, кроме того, оснащена приемной станцией для приема груза и/или пассажиров, которая удалена от стыковочной станции на некоторое расстояние; способ предусматривает следующие этапы:
приближение летательного аппарата к домашней станции;
стыковка летательного аппарата со стыковочной станцией, которая зацепляет грузовой модуль;
транспортировка упомянутого грузового модуля от стыковочной станции к приемной станции, причем грузовой модуль либо отсоединяется от летательного аппарата и доставляется на приемную станцию отдельно, либо грузовой модуль остается закрепленным на летательном аппарате и транспортируется на приемную станцию вместе с летательным аппаратом;
перемещение груза и/или пассажиров соответственно в грузовой модуль с приемной станции или из грузового модуля на приемную станцию;
характерным является то, что грузовой модуль включает по меньшей мере один отсек для удержания по меньшей мере части груза и/или пассажиров, причем указанный отсек не имеет нижней стенки, дополнительно имеет ручку и может выдвигаться из грузового модуля, а приемная станция оснащена приемником для приема груза, и этот приемник оснащен крюковым механизмом для зацепления отсека за ручку и приспособлен для перемещения сцепленного отсека между грузовым модулем и приемником через отверстие в указанном приемнике, причем приемник имеет открытую нижнюю секцию, которая расположена ниже отверстия приемника, то есть способ дополнительно предусматривает этап, на котором:
крюковой механизм приемника зацепляет ручку отсека;
перемещение сцепленного отсека между грузовым модулем и приемником, в результате чего грузовой модуль перемещается в положение, по меньшей мере, частично внутри приемника, причем часть грузового модуля внутри приемника располагается над открытой нижней секцией приемника;
при необходимости возврат связанного отсека от приемника к грузовому модулю и отсоединение крюкового механизма от ручки.
Ясно, что конкретное устройство приемной станции и, в частности, ее приемника, позволяет чрезвычайно эффективно извлекать груз из грузового модуля. Нижняя часть приемника открыта кверху, поэтому груз в выступающем отсеке грузового модуля, который открыт снизу, упадет в приемник. Учитывая ничтожную глубина этого «падения», риск повреждения груза исключается. Кроме того, приемник может быть снабжен амортизирующей внутренней частью, например, подушкой, чтобы смягчить удар при падении.
Третий и четвертый аспекты могут быть выгодно объединены с указанными выше первым и вторым аспектами, и/или с любым из дополнительных аспектов, и/или с любым или всеми вариантами осуществления, далее обсуждаемыми в этом документе.
Следует отметить, что последующие предпочтительные варианты осуществления также применимы к вышеупомянутым аспектам, вследствие чего термин «подвижное средство сцепления» может ссылаться на упомянутое выше «средство сцепления грузового модуля».
В дальнейшем аспекте изобретение предлагает систему для перевозки грузов и/или пассажиров, включающую одну или более домашних станций и один или более (беспилотных) летательных аппаратов (предпочтительно БПЛА) для перевозки грузов и/или пассажиров, причем летательный аппарат имеет съемный грузовой модуль (предпочтительно соединяемый с летательным аппаратом посредством рамы), выполненный с возможностью удержания груза и/или пассажиров в одном или более грузовых отсеках грузового модуля; домашняя станция включает стыковочную станцию для стыковки одного или более летательных аппаратов и, кроме того, оснащена приемной станцией для приема груза и/или пассажиров, которая удалена от стыковочной станции на некоторое расстояние и включает средство транспортировки, соединяющее стыковочную станцию и приемную станцию; сама же стыковочная станция обладает возможностью физического сцепления и надежного удержания летательного аппарата, причем стыковочная станция предпочтительно имеет возможность последующего физического сцепления с грузовым модулем (и/или, возможно, с рамой сцепленного летательного аппарата). Приемная станция включает приемник для груза и/или пассажиров и приспособлен для выгрузки по меньшей мере части груза и/или пассажиров из грузового модуля в приемник, когда указанный грузовой модуль транспортируется на приемную станцию Средство транспортировки способно транспортировать по меньшей мере сцепленный грузовой модуль сцепленного летательного аппарата от стыковочной к приемной станции;
Как упоминалось ранее, стыковочная станция, на которую приземляется и с которой взлетает летательный аппарат, обычно располагается на высоте (хотя также возможно и иное размещение, когда стыковочная станция монтируется на стене). Эта стыковочная станция приспособлена для посадки летательного аппарата и для физического сцепления и удержания его на стыковочной станции, хотя предпочтительно также создаются и дополнительные механизмы для удержания летательного аппарата в желаемом положении (например, для зарядки). Стоит отметить, что стыковочная станция в этом плане может включать некую посадочную платформу. Кроме того, следует отметить, что стыковочная станция предпочтительно оснащена устройствами связи ближнего действия для связи с летательным аппаратом. Это позволяет стыковочной станции точно направлять летательный аппарат в последней части маршрута для правильной стыковки (положение и ориентация), поскольку здесь часто требуется значительная степень точности. Дополнительное сцепление с грузовым модулем (и/или рамой) обеспечивает лучшее (более безопасное) закрепление, и, кроме того, в некоторых вариантах осуществления система позволяет отдельно транспортировать грузовой модуль (с или без рамы, которая удерживает грузовой модуль) между стыковочной и приемной станциями. Поэтому сама по себе система характеризуется наличием средства транспортировки, которое перемещает, по меньшей мере, грузовой модуль между стыковочной и приемной станциями, тогда как системы предшествующего уровня техники только перемещают груз и/или пассажиров.
Большинство систем предшествующего уровня техники (таких как упомянутые), в которых используется система доставки грузов с помощью летательных аппаратов и домашних станций, используют аналогичную тактику, а именно посадку летательного аппарата на домашнюю станцию, где груз извлекается из летательного аппарата, а затем доставляется в соответствующий конечный пункт назначения (например, конкретный почтовый ящик). Стыковочная станция обычно размещается на крышах или даже на верхушках столбов или вышек, то есть, как правило, на высоте. Заявитель намеревается создать систему, в которой груз извлекается не в «месте посадки», а доставляется в грузовом модуле с места посадки или со стыковочной станции на приемную станцию. Преимущество, помимо прочего, состоит в том, что во время транспортировки груз дополнительно защищен грузовым модулем от повреждения или других факторов окружающей среды (тепла, влаги, ветра и т.д.), но главное то, что грузовой модуль представляет собой известное количество и приемные станции могут быть легко адаптированы для работы с грузовым модулем. Она может варьироваться от усовершенствованной стыковки грузового модуля до приемной станции и от автоматической системы извлечения передачи груза до приемной станции (и, в частности, до правильного приемника, такого как почтовый ящик) до системы, позволяющей летательному аппарату оснащаться новыми аккумуляторами на приемной станции (или на стыковочной станции). Кроме того, перемещение целого грузового модуля на приемную станцию также повысит эффективность размещения нового груза в грузовом модуле, который будет отправлен летательным аппаратом, поскольку все это можно сделать за одну операцию, а не путем отдельных действий. Выполняя более сложные действия на приемной станции (извлечение груза, размещение нового груза ...), аппаратные средства для их осуществления также в основном присутствуют на приемной станции. Учитывая уязвимость аппаратных средств, целесообразно располагать их ближе к приемной станции, которая обычно будет находиться в более безопасном месте (защищенной от повреждений или других воздействий среды), и, следовательно, их также будет легче ремонтировать в случае неполадок. В этом есть отличие от старых систем, в которых технический специалист должен монтировать домашнюю станцию на обычно расположенную на высоте стыковочную станцию, что делает ремонт или обслуживание более трудным и опасным. В этом аспекте предпочтительно, чтобы как можно больше аппаратных средств располагалось в легкодоступных местах.
Кроме того, в некоторых вариантах осуществления грузовой модуль (с рамой или без нее) отсоединяется от летательного аппарата. Это позволяет домашней станции прикрепить новый грузовой модуль (и, возможно, раму) к летательному аппарату, приспособленному для нового груза, который должен быть отправлен с указанной домашней станции с летательным аппаратом другому получателю. Поскольку в некоторых случаях объем и форма груз могут быть разными, иногда возникает необходимость в использовании определенных грузовых модулях для удержания груза. Это может быть легко решено простой заменой грузового модуля (и, возможно, рамы).
В дополнительном аспекте приемная станция предпочтительно также выполнена с возможностью переноса нового груза в грузовой модуль. Таким образом, от домашней станции больше не требуется перемещать новый груз на стыковочную станцию, где находится летательный аппарат, а прямо в грузовой модуль с вышеупомянутыми преимуществами.
В первом предпочтительном варианте осуществления изобретения грузовой модуль крепится к летательному аппарату с возможностью отсоединения, а стыковочная станция оснащена стационарным средством сцепления с летательным аппаратом. Средство транспортировки оснащено подвижным средством сцепления для установления физического контакта между грузовым модулем и средством транспортировки, причем указанное подвижное средство сцепления предназначено для отсоединения и крепления грузового модуля к летательному аппарату. Кроме того, средство транспортировки предназначено для перемещения подвижного средства сцепления и отсоединенного грузового модуля между стыковочной станцией и приемной станцией.
В этом конкретном варианте осуществления грузовой модуль может быть отсоединен от летательного аппарата, а затем транспортироваться со стыковочной станции к приемной станции средством транспортировки благодаря физическому контакту между грузовым модулем и средством транспортировки, в частности, с помощью подвижного средства сцепления. Следует отметить, что указанная физическая связь (подвижная) предпочтительно устанавливается после сцепления летательного аппарата со стыковочной станцией. Это позволяет летательному аппарату быть приведенным в правильное положение, чтобы подвижное средство сцепления осуществляло правильное сцепление с грузовым модулем и отсоединение упомянутого грузового модуля. Как только грузовой модуль закреплен подвижным средством сцепления и, таким образом, средством транспортировки, он перемещается между стыковочной станцией и приемной станцией с помощью средства транспортировки. Следует отметить, что средство транспортировки может включать физический маршрут (например, направляющие или тому подобное), а также один или более подвижных узлов, которые могут перемещаться вдоль маршрута. Грузовой модуль прикреплен к одному из подвижных узлов и, таким образом, транспортируется в сочетании с подвижным узлом. Как упоминалось ранее, это безопасно доставляет груз к приемной станции (и от нее), где его легче извлечь. Кроме того, при отсоединении грузового модуля остается фактически переместить лишь небольшую часть летательного аппарата, поэтому энергопотребление сводится к минимуму, а опасность повреждения самого летательного аппарата (который обычно бывает хрупким) при этом практически отсутствует.
В первом предпочтительном варианте осуществления изобретения летательный аппарат оснащен рамой для удержания грузового модуля, причем рама обладает возможностью отсоединения от летательного аппарата, а стыковочная станция оснащена стационарным средством сцепления с летательным аппаратом. Указанное средство сцепления оснащено подвижным средством сцепления для установления физического контакта между рамой и средством транспортировки, причем указанное подвижное средство сцепления предназначено для отсоединения и крепления рамы к летательному аппарату. Кроме того, средство транспортировки предназначено для перемещения подвижного средства сцепления и отсоединенной рамы между стыковочной станцией и приемной станцией.
В этом альтернативном варианте осуществления рама в сборе может полностью отсоединяться от летательного аппарата. Обратите внимание, что грузовой модуль все еще удерживается рамой/в раме. Заявитель заметил, что в определенных ситуациях может быть предпочтительным, чтобы рама была отсоединена от летательного аппарата и в сборе была перемещена со стыковочной станции к приемной станции, удерживая грузовой модуль. Опять же, дополнительным преимуществом является то, что рама представляет собой известное количество, и, таким образом, приемная станция может легко и автоматически извлекать груз из грузового модуля (или помещать в него новый груз), поскольку она знает точное расположение грузового модуля в раме. Кроме того, благодаря перемещению всей рамы обеспечивается более высокий уровень безопасности перемещаемого груза, при этом вес груза, который перемещается средством транспортировки (и, в частности, с помощью подвижного средства сцепления), остается максимально низким (рама обычно весит не намного больше грузового модуля). Как и прежде, сначала летательный аппарат будет пристыкован и закреплен (первым средством сцепления, предпочтительно стационарным, таким как один или более зажимов, магнитов или аналогичных систем), после чего рама будет физически соединена с помощью подвижного средства сцепления. Это также может выполняться с помощью зажимного механизма или магнитной системы, но, как правило, осуществляется любым соединительным механизмом, адаптированным специально для рам (которые предпочтительно оснащаются согласующим механизмом или средством, сочленяющимся с соединительным механизмом средства сцепления).
В третьем предпочтительном варианте осуществления изобретения средство транспортировки содержит подвижное средство сцепления, причем указанное подвижное средство сцепления включает средство сцепления летательного аппарата для сочленения средства сцепления с летательным аппаратом. Кроме того, средство транспортировки способно перемещать средство сцепления летательного аппарата и сам летательный аппарат с грузовым модулем между стыковочной станцией и приемной станцией.
В этом варианте осуществления весь летательный аппарат (с дополнительной рамой и грузовым модулем) перемещается к приемной станции после стыковки. Обратите внимание, что теоретически стыковочная станция может быть подвижной и доставлять состыкованный летательный аппарат к приемной станции. Однако также может быть случай, когда транспортируется или перемещается только часть стыковочной станции, или когда стыковочная станция остается неподвижной, а средство транспортировки полностью отделено от нее. При этом сохраняется преимущество перемещения груза из грузового модуля только на приемной станции. Кроме того, за счет перемещения всего летательного аппарата на приемную станцию теперь можно заменять аккумуляторы летательного аппарата (поскольку стыковка и доставка/прием груза обычно занимают мало времени, чтобы успеть зарядить аккумуляторы в достаточной степени без усовершенствованного оборудования, замена батарей предпочтительна, поскольку они могут быть поставлены на зарядку на приемной станции для следующего летательного аппарата) в более контролируемых условиях (а не на стыковочной станции, которая обычно труднодоступна). В этом варианте летательный аппарат снабжен одним или более сменными аккумуляторами, которые можно заряжать.
В предпочтительном варианте осуществления (по меньшей мере) трех предыдущих альтернативных вариантов осуществления средство транспортировки содержит одну или более направляющих, проходящих между стыковочной и приемной станциями, причем указанные направляющие приспособлены для направления, по меньшей мере, подвижного средства сцепления между стыковочной и приемной станциями. Подвижное средство сцепления оснащено электродвигателем для перемещения подвижного средства сцепления вдоль направляющих, причем предпочтительно, чтобы указанные направляющие проходили между стыковочной и приемной станциями по практически вертикальной оси. В альтернативном варианте направляющие проходят по горизонтальной оси.
Направляющие представляют собой простую, но эффективную систему, с помощью которой средство транспортировки может перемещать грузовой модуль (с или без рамы/летательного аппарата) между стыковочной и приемной станциями. Подвижное средство сцепления может оснащаться электродвигателем, способным перемещать подвижное средства сцепления вдоль направляющих.
Как упоминалось ранее, поскольку стыковочная станция часто находится на высоте или в иным образом удаленном положении (подвешена к стене на высоте), направляющие обычно будут прямыми и идти по одной оси, чаще всего вертикальной, хотя и горизонтальная ось может иметь место (например, когда стыковочная станция смонтирована на стене на некотором удалении). Возможно, что в зависимости от ситуации направляющие будут иметь кривизну или даже повороты. Это особенно актуально при работе в составе крупных структур с централизованной станцией доставки (приемной станцией), но также и в небольших структурах, где приемная станция фактически представляет собой множество приемных станций (например, почтовых ящиков разных жителей в многоквартирном доме или офисном здании).
В предпочтительном варианте осуществления средство транспортировки оснащено одной или более направляющими, проходящими между стыковочной станцией и приемной станцией по вертикальной оси, посредством чего направляющие способны выдвигаться и задвигаться для транспортировки летательного аппарата к приемной станции и от нее.
Направляющие могут быть телескопическими и задвигаться внутрь или выдвигаться наружу (или бок о бок), но, тем не менее, они управляются электродвигателем, который предпочтительно работает по командам стыковочной станции. Например, при приближении летательного аппарата стыковочная станция будет принимать его сигналы и, в свою очередь, отправлять электродвигателю команду на выдвижение направляющих, и, таким образом, стыковочная станция будет готова к стыковке летательного аппарата. После того, как летательный аппарат надежно закреплен, стыковочная станция может подать команду электродвигателю на втягивание рельсов, возвращая таким образом стыковочную станцию (и закрепленный на ней летательный аппарат) обратно к приемной станции, где груз может быть извлечен или помещен в грузовой модуль летательного аппарата.
Преимущество функции выдвижных/убирающихся направляющих состоит в том, что стыковочную станцию можно полностью отвести от ее поднятого или иного выдвинутого положения. Это не только облегчает прием груза с летательного аппарата (или размещение нового груза в нем), но также позволяет привести стыковочную станцию в безопасное положение, когда она не активна, когда поставки не запланированы, в случае плохой погоды и т.д.
Далее в предпочтительном варианте осуществления стыковочная станция обладает возможностью получения электроэнергии через одну или более направляющих для зарядки одного или более аккумуляторов летательного аппарата. Обратите внимание, что остается возможность заряжать аккумулятор(ы) летательного аппарата, находящиеся в летательном аппарате, или заменять аккумуляторы летательного аппарата, заряжая их на стыковочной станции за счет электроэнергии, подаваемой по направляющим; возможны сразу оба варианта. Использование направляющих для подачи питания позволяет избежать монтажа дополнительной проводки. Питание может подаваться по внутренней проводку в направляющих, чтобы избежать случайного воздействия на нее и предотвратить повреждение, либо может подаваться по внешним линиям, проходящим вдоль направляющих. Обратите внимание, что стыковочная станция может также получать питание от других (сетевых) источников, и необязательно от приемной станции и/или через направляющие. Кроме того, аккумулятор(ы), оставшийся(–иеся) на док–станции, может(могут) заряжаться через солнечную панель или подобное устройство на стыковочной станции в дополнение или в качестве замены проводного подключения к электросети. Преимущества такого варианта очевидны, когда один или более аккумуляторов постоянно присутствуют на стыковочной станции для зарядки, а затем их можно заменить аккумуляторами состыкованных летательных аппаратов.
В предпочтительном варианте осуществления стыковочная станция приспособлена для замены одного или более аккумуляторов летательного аппарата заряженным аккумулятором и/или стыковочная станция способна заряжать один или более аккумуляторов летательного аппарата по проводной линии и/или через беспроводную зарядку. Следует отметить, что этот вариант осуществления может присутствовать как в дополнение к функциям предшествующего варианта осуществления, так и вместо них.
В предпочтительном варианте осуществления стыковочная станция способна вмещать один или более аккумуляторов для их зарядки посредством электросети и/или через другие источники питания, например, через один или более фотоэлектрических элементов или солнечных батарей, ветряных турбин и т. п., установленных на стыковочной станции и/или рядом с ней, и мощность которых может использоваться для питания самой стыковочной станции и/или зарядки аккумуляторов, находящихся на стыковочной станции. Эти аккумуляторы, находящиеся на стыковочной станции, могут, помимо прочего, выполнять одну или более функций. Они могут быть использованы для питания стыковочной станции в любое время, чтобы поддерживать ее в рабочем состоянии без необходимости использования внешнего источника питания (электросети), но также могут использоваться в качестве замены аккумуляторов состыкованных летательных аппаратов. Предпочтительно стыковочная станция может оценивать состояние заряда аккумулятора(–ов) летательного аппарата и на основании этого принимать решение о необходимости замены аккумуляторов. Летательный аппарат также может быть в состоянии отменить решение стыковочной станции. Наконец, аккумуляторы могут выполнять обе функции: сменных аккумуляторов и аккумуляторного блока для самой стыковочной станции.
Сменные аккумуляторы состыкованного летательного аппарата могут, в свою очередь, заряжаться стыковочной станцией одним или более из вышеупомянутых способов. Зарядный контакт предпочтительно устанавливается с помощью магнитов.
Как вариант, в будущем аккумулятор(ы) летательного аппарата могут быть включены в грузовой модуль. Это может позволить системе заменить весь грузовой модуль при получении, и при этом новый грузовой модуль будет содержать заряженные аккумуляторы. Аккумуляторы замененного грузового модуля могут быть заряжены для будущих замен. Альтернативно, аккумуляторы в грузовом модуле могут просто заменяться на приемной или на стыковочной станции без замены всего грузового модуля.
Как отмечалось ранее, нецелесообразно перезаряжать летательные аппараты, когда они состыкованы, поскольку даже у более новых и более продвинутых моделей время работы аккумуляторов относительно короткий, а зарядка может занять непомерное количество времени. Следовательно предпочтительно, чтобы домашняя станция содержала один или более запасных аккумуляторов для летательных аппаратов и устройства для зарядки. Таким образом, аккумуляторы летательного аппарата, который стыкуется с домашней станцией, можно заменить на (более) заряженный, в то время как полностью или частично разряженные аккумуляторы, снятые с летательного аппарата, можно заряжать в периоды между их эксплуатацией. Предпочтительно, летательный аппарат имеет форму, позволяющую легко заменять аккумулятор(ы) при стыковке.
В предпочтительном варианте осуществления стыковочная станция содержит посадочную платформу для приземления летательного аппарата, и стыковочная станция дополнительно оснащена средством стыковки для правильного выравнивания летательного аппарата со стыковочной станцией с целью установления физического контакта с летательным аппаратом. Упомянутое средство стыковки содержит один или более магнитов для выравнивания летательного аппарата относительно стыковочной станции, процессор которой содержит модуль беспроводной связи для установления связи с летательным аппаратом и передачи летательному аппарату команд от процессора. Альтернативно (или дополнительно) средство стыковки может иметь зажимные механизмы для зацепления частей летательного аппарата (будь то сам летательный аппарат, рама или грузовой модуль).
Посадочная платформа может быть выполнена в виде плоской поверхности или может просто обеспечивать опоры по обе продольные стороны летательного аппарата. Это, например, позволит легко отсоединить грузовой модуль (и, возможно, раму) от летательного аппарата и опустить его на приемную станцию (и подняться с приемной станции обратно на летательный аппарат).
Стыковочная станция (средство стыковки) может корректировать возможные отклонения от желаемого положения летательного аппарата, чтобы обеспечить правильную стыковку. Как упоминалось ранее, для того, чтобы средство транспортировки могло правильно захватило грузовой модуль для его перемещения между стыковочной и приемной станциями, летательный аппарат должен быть очень точно расположен, не только с точки зрения расстояния до стыковочной станции, но также и с точки зрения осевой ориентации, поэтому средство транспортировки может соединяться с грузовым модулем и перемещать его (между стыковочной и приемной станциями) и/или таким образом приемная станция может забирать груз из грузового модуля или размещать груз в нем. Хотя летательный аппарат может относительно точно приземлиться на посадочную платформу, получая команды от стыковочной станции, почти всегда будут иметь место некоторые отклонения (ветер, искажение сигнала, запаздывание сигнала…), которые предпочтительно корректировать. Таким образом, заявитель предоставил средства стыковки для достижения этой цели. В первом варианте это может быть система магнитов, которая, как только летательный аппарат находится в приблизительном положении (не обязательно после посадки), приводит летательный аппарат в точное желаемое положение, воздействуя на намагничиваемую часть летательного аппарата (например, на часть рамы, если она является элементом летательного аппарата). Поскольку общее позиционирование летательного аппарата само по себе может быть очень точным, магниты не обязательно должны быть сильными для исправления отклонений, поэтому магнитное поле не будет мешать другим системам. В альтернативном варианте могут быть предусмотрены зажимные механизмы, предназначенные для захвата летательного аппарата (опять же, например, за раму), как только он окажется в пределах досягаемости, и затем приведения летательного аппарата в желаемое положение. Обратите внимание, что может также использоваться сочетание этих средств: магниты подводят летательный аппарат в зону досягаемости зажимных механизмов, после чего зажимы могут перемещать летательный аппарат в требуемое положение.
В предпочтительном варианте стыковочная станция может оснащаться одной или более солнечными батареями. Поскольку стыковочная станция чаще всего находится на высоте и удалена от зданий, чтобы обеспечить легкую посадку и взлет летательных аппаратов, солнечные панели на стыковочной станции, то это является отличным местом для размещения солнечных панелей и получения энергии из солнечного света. Солнечные панели могут, например, встраиваться в посадочную платформу, на которую будет приземляться летательный аппарат. Эта энергия может использоваться для выполнения одного или более действий: питание стыковочной станции, зарядка аккумуляторов, питание средств транспортировки и т.д.
В предпочтительном варианте осуществления приемная станция может оснащаться одной или более охлаждаемыми приемниками, например, для доставки продуктов питания, медикаментов или другого груза, который нуждается в хранении в холодильнике. Домашняя станция может быть адаптирована таким образом, что летательный аппарат (или центральная система управления) предупреждает домашнюю станцию о том, что доставляется груз, который требует хранения в холодильнике, так что приемная станция сможет поместить груз в соответствующий приемник. Аналогичное усовершенствование может иметь место при доставке готовых блюд, причем этот груз затем может храниться в герметичном приемнике для сохранения тепла.
Следует понимать, что в обоих случаях грузовой модуль может быть специально адаптирован для конкретных целей.
В предпочтительном варианте осуществления стыковочная станция оснащена посадочной платформой или посадочным боксом для летательного аппарата, причем такая платформа или бокс могут закрываться. Это особенно целесообразно в случае плохих метеоусловий для защиты летательного аппарата. В качестве альтернативы или дополнения может быть предусмотрена выступающая конструкция или навес (предпочтительно жесткий) для защиты посадочной платформы или бокса, причем такая нависающая конструкция, в свою очередь, может быть задвижной, складной или иным образом убирающейся.
В предпочтительном варианте осуществления стыковочная станция имеет складывающуюся посадочную платформу для летательного аппарата (как показано на чертежах).
В предпочтительном варианте осуществления грузовой модуль (и, скорее всего, также рама и летательный аппарат) дают возможность приемной станции манипулировать грузом как с передней, так и с задней стороны грузового модуля. Это может означать, что летательный аппарат также способен стыковаться как с передней, так и с задней стороны стыковочной станции. Грузовой модуль в этом варианте осуществления может иметь по меньшей мере две дверцы или отверстия, через которые груз может быть извлечен или загружен. Следует отметить, что такой двусторонний подход означает, что груз, например, может быть загружен в грузовой модуль с одной стороны, а извлечен с другой.
В предпочтительном варианте осуществления док–станция и летательный аппарат снабжены системами связи друг с другом, работающими, по меньшей мере, на небольшом расстоянии. Это может быть полезным при стыковке летательного аппарата, поскольку стыковочная станция может корректировать отклонения от требуемого положения для посадки/стыковки летательного аппарата. Этого можно достигнуть, например, с помощью датчиков, которые смогут определять положение летательного аппарата и его правильное расположение относительно стыковочной станции. Кроме того, связь может использоваться для других действий, таких как подтверждение доставки, передача информации о грузе или контроль необходимости замены аккумулятора (проверка уровня заряда аккумулятора(–ов), как подлежащих замене, так и запасных, и т.д.).
В предпочтительном варианте осуществления средство транспортировки оснащено колесами для обеспечения возможности перемещения (по меньшей мере) грузового модуля по маршруту движения средства транспортировки.
Грузовой модуль предпочтительно имеет несколько отсеков, которые позволяют летательному аппарату доставлять множество отдельных «посылок» (и/или забирать отдельные посылки). Обратите внимание, что это может быть осуществлено путем наличия нескольких «ящиков» (или аналогичных систем), которыми можно манипулировать на приемной станции для выгрузки и/или загрузки груза. К примеру, доступ к грузовому модулю может быть как спереди, так и сзади, что позволит параллельную доставку одной или более посылок и/или извлечение одной или более посылок, например, извлечение доставленного груза с передней стороны, а новый груз загружается в грузовой модуль через тыльную сторону.
Предпочтительно летательный аппарат оснащен системой связи, которая позволяет обмениваться сигналами между летательным аппаратом и грузовым модулем и/или рамой для непосредственного отделения рамы или грузового модуля от летательного аппарата.
В предпочтительном варианте грузовой модуль может быть приспособлен для перевозки людей (и/или животных).
В предпочтительном варианте осуществления грузовой модуль имеет, по меньшей мере, два отсека для хранения груза, причем эти отсеки можно (предпочтительно путем выдвижения) извлекать из грузового модуля и загружать в него, а приемная станция приспособлена для выемки и загрузки отсеков в грузовой модуль; при этом предпочтительно, чтобы приемная станция была выполнена с возможностью выемки отсеков из грузового модуля с одной стороны грузового модуля и загрузки отсеков в грузовой модуль с противоположной стороны грузового модуля. Обратите внимание, что отсеки могут иметь форму лотков и что грузовой модуль может быть приспособлен для размещения любого их количества в различных размерах (например, 1–го большого лотка с одной стороны, и 3–х меньших лотков на противоположной). Этот вариант осуществления дает дополнительное преимущество, заключающееся в том, что одна сторона может использоваться для извлечения отсеков из грузового модуля, которые могут затем опорожняться приемной станцией. Противоположная сторона может быть использована для приема груза (в отсеках). Благодаря доступу и использованию обоих сторон грузового модуля время загрузки и выгрузки может быть сокращено вдвое. Детали этого аспекта будут приведены в примерах, хотя следует учитывать, что сущность данного аспекта выходит за рамки требований изобретения и может быть легко реализована в других аналогичных системах для оптимизации доставки и загрузки.
В этом свете заявитель также представляет следующий аспект изобретения – систему для перевозки грузов и/или пассажиров, включающую одну или более домашних станций и один или более летательных аппаратов, предпочтительно беспилотных летательных аппаратов (БПЛА), для перевозки груза (в грузовом модуле на летательном аппарате). Домашняя станция включает в себя стыковочную станцию (куда летательный аппарат может приземляться и стыковаться) и приемную станцию (где груз может быть извлечен и/или загружен в грузовой модуль летательного аппарата), а также средство транспортировки стыкованных к домашней станции летательных аппаратов между стыковочной и приемной станциями. Грузовой модуль летательного аппарата специально приспособлен для приема и удержания любого количества (1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 15, 20 и т.д.) съемных (путем выдвижения) отсеков с передней и тыльной сторон. Приемная станция выполнена с возможностью выемки (или частичного выдвижения) определенных отсеков из грузового модуля (например, посредством распознавания с помощью идентификатора, такого как QR–код), чтобы извлечь груз из указанного отсека. Это позволяет летательному аппарату выступать в качестве системы доставки для ряда получателей, гарантируя, что нужный груз прибудет к нужному соответствующему получателю. Кроме того, приемная станция может быть приспособлена для выемки или частичного выдвижения отсеков из грузового модуля для загрузки нового груза в указанные отсеки, которые затем могут быть повторно размещены в грузовом модуле для последующей доставки. В качестве альтернативы, новые отсеки могут быть просто загружены в грузовой модуль, откуда ранее уже был извлечен отсек.
Следует учитывать, что большинство улучшений (если не все) из обсуждаемых в этом документе, также применимы к этому аспекту изобретения.
В дальнейшем аспекте изобретение касается способа транспортировки груза и/или пассажиров с помощью летательного аппарата, предпочтительно беспилотного летательного аппарата (БПЛА), от и до домашней станции, причем летательный аппарат содержит грузовой модуль, предпочтительно с возможностью отсоединения от летательного аппарата, выполненный с возможностью удержания груза и/или пассажиров в одном или более грузовых отсеках грузового модуля; домашняя станция включает стыковочную станцию на высоте для стыковки одного или более летательных аппаратов, и, кроме того, оснащена приемной станцией для приема груза и/или пассажиров, которая удалена от стыковочной станции на некоторое расстояние; способ предусматривает следующие этапы:
летательный аппарат приближается к домашней станции, предпочтительно используя бортовую навигационную систему;
стыковка летательного аппарата со стыковочной станцией посредством:
физического сцепления и надежного удержания летательного аппарата; и
последующего физического сцепления с грузовым модулем сцепленного летательного аппарата;
транспортирование по меньшей мере сцепленного грузового модуля сцепленного летательного аппарата от стыковочной к приемной станции;
перемещение груза и/или пассажиров соответственно в грузовой модуль с приемной станции или из грузового модуля на приемную станцию; а также
транспортирование по меньшей мере соответствующего грузового модуля сцепленного летательного аппарата от приемной к стыковочной станции.
Следует отметить, что этапы перемещения грузового модуля обычно будут выполняться с помощью подвижного средства сцепления, которым оснащена домашняя станция. Подвижное средство сцепления может быть частью средства транспортировки, которое соединяет стыковочную станцию и приемную станцию (например, посредством направляющих, по которым перемещается подвижное средство сцепления). Далее способы основаны на том, что обсуждается для системы, а именно, что грузовой модуль перемещается между стыковочной и приемной станциями и что груз извлекается из грузового модуля на приемной станции или помещается в него вместо извлечения или помещения груза на стыковочной станции, как это происходит в системах предшествующего уровня техники, где груз затем перемещается между стыковочной станцией и приемной станцией, в то время как летательный аппарат и грузовой отсек остаются неподвижными на стыковочной станции. Преимущества подробно обсуждались выше и также применимы к описанному выше методу.
В предпочтительном варианте осуществления домашняя станция оснащена подвижным средством сцепления, которое может устанавливать физическую связь с грузовым модулем, причем способ, кроме того, содержит следующий этап перед тем, как подвижное средство сцепления перемещает, по меньшей мере, сцепленный грузовой модуль сцепленного летательного аппарата от стыковочной станции к приемной станции:
отделение грузового модуля от летательного аппарата;
а следующий этап после того, как подвижное средство сцепления переместило по меньшей мере сцепленный грузовой модель сцепленного летательного аппарата от приемной к стыковочной станции:
присоединение грузового модуля к летательному аппарату;
в результате подвижное средство сцепления транспортирует грузовой модуль между стыковочной и приемной станциями.
В альтернативном варианте осуществления летательный аппарат оснащен рамой для удержания грузового модуля, а домашняя станция оснащена подвижным средством сцепления, которое может устанавливать физическую связь с рамой, удерживающей грузовой модуль, причем способ, кроме того, содержит следующий этап перед тем, как подвижное средство сцепления перемещает, по меньшей мере, сцепленный грузовой модуль сцепленного летательного аппарата от стыковочной станции к приемной станции:
отделение рамы, удерживающей грузовой модуль, от летательного аппарата;
а следующий этап после того, как подвижное средство сцепления переместило по меньшей мере сцепленный грузовой модель сцепленного летательного аппарата от приемной к стыковочной станции:
присоединение рамы, удерживающей грузовой модуль, от летательного аппарата;
в результате подвижное средство сцепления транспортирует раму, удерживающую грузовой модуль, между стыковочной и приемной станциями.
Эти варианты осуществления, в частности, проясняют, что грузовой модуль или рама с грузовым модулем отсоединяются от летательного аппарата, а затем перемещаются с помощью подвижного средства сцепления между стыковочной и приемной станциями. Преимущества таких вариантов заключаются в улучшенной функциональности системы выгрузки и/или загрузки, благодаря которой груз извлекается из грузового модуля или помещается в него. Системы предшествующего уровня техники выполняют это действие на стыковочных станциях, которые расположены в неудобных и часто труднодоступных местах (подвешены на стенах, крышах, вышках...). Это значительно затрудняет обслуживание, ремонт или монтаж, и приводит к повышению расходов, уровня опасности и сложности. Кроме того, оборудование для выполнения выгрузки/загрузки находится в таких труднодоступных местах, которые часто подвергаются неблагоприятным воздействиям окружающей среды и гораздо легче могут быть повреждены. Обратите внимание, что это позволяет сделать стыковочную станцию более компактной, что является желательным по многим вышеупомянутым причинам, а также уменьшить объемы и площади, подвергающиеся воздействию факторов окружающей среды (обратите внимание, что к таковым также относятся дикие животные, например, птицы и т.д.).
В альтернативном предпочтительном варианте осуществления домашняя станция оснащена подвижным средством сцепления, которое может устанавливать физическую связь с летательным аппаратом, содержащим грузовой модуль, причем подвижное средство сцепления перемещает летательный аппарат и грузовой модуль (и, как вариант, раму, удерживающую указанный грузовой модуль, и находящуюся в летательном аппарате) от стыковочной до приемной станции.
В дополнительном предпочтительном варианте осуществления домашняя станция оснащена одной или более направляющими, проходящими между стыковочной и приемной станциями по вертикальной оси, по которым подвижное средство сцепления перемещается между стыковочной и приемной станциями посредством выдвижения или задвигания направляющих. В альтернативном варианте направляющие проходят по горизонтальной оси.
Задвигание и выдвижение направляющих для перемещения подвижных средств сцепления (и, следовательно, грузового модуля) к приемной станции и от нее позволяет легко забирать грузовой модуль при малых затратах энергии. Кроме того, в случае, если вся стыковочная станция задвигается и выдвигается с помощью телескопических направляющих, это позволяет перевести стыковочную станцию в безопасное положение (менее подверженное воздействию окружающей среды и повреждениям), когда она не работает (то есть когда в течение определенного времени не планируется поставка, при неблагоприятных атмосферных условиях и т.д.).
В предпочтительном варианте осуществления способ содержит этап оценки уровня заряда аккумулятора(–ов) летательного аппарата (поскольку он обязательно имеет источник питания) стыковочной станцией. Если уровень заряда падает ниже определенного порогового значения, а аккумулятор(–ы) на стыковочной станции имеют заряд выше, стыковочная станция может инициировать обмен аккумулятором(–ами) между летательным аппаратом и ей самой. После этого принятый с летательного аппарата аккумулятор(ы) предпочтительно заряжается док–станцией (чтобы подготовить аккумулятор(ы) к будущей замене). Зарядка аккумуляторов, находящихся на стыковочной станции, может быть непрерывной (через подключение к электросети) и/или происходить от возобновляемого источника энергии на стыковочной станции, такого как солнечные батареи, ветряные турбины или тому подобное (или может происходить от другого аккумулятора, закрепленного на стыковочной станции, который заряжается одним или более из указанных выше способов). В предпочтительных вариантах осуществления стыковочная станция оснащена одним или более (двумя, тремя, четырьмя или более) аккумуляторами, а в некоторых вариантах осуществления – даже одним или более аккумуляторами различных типов в зависимости от распространенности различных типов летательных аппаратов и их аккумуляторов в определенных регионах.
В предпочтительном варианте осуществления, в котором домашняя станция оснащена средством сцепления грузового модуля, выполненного с возможностью установления физического контакта с грузовым модулем, домашняя станция включает одну или более направляющих, проходящих между стыковочной и приемной станциями, а вдоль указанных направляющих между стыковочной и приемной станциями перемещается подвижное средство сцепления, причем подвижное средство сцепления оснащено электродвигателем для своего перемещения вдоль указанных направляющих; при этом предпочтительно, чтобы указанные направляющие проходили между стыковочной и приемной станциями по по существу вертикальной оси.
Моторизованные подвижные средства сцепления обеспечивают быстрое и эффективное перемещение грузового модуля. Следует отметить, что электродвигатель предпочтительно питается от электросети и может питаться от упомянутого источника через направляющие для сохранения энергии летательного аппарата.
В особенно предпочтительном варианте осуществления летательный аппарат, предпочтительно БПЛА, и домашняя станция при описанных выше способах представляют собой именно летательные аппараты, предпочтительно БПЛА, и домашние станции в соответствии с системой изобретения, описанной в данном документе.
Заявитель также хотел бы отметить, что все преимущества ранее описанных вариантов изобретения по осуществлению системы доставки груза, естественно, также будут применяться к способу изобретения.
Изобретение далее описано посредством следующих неограничивающих примеров, которые дополнительно иллюстрируют изобретение, не предназначены и не должны интерпретироваться как ограничивающие объем изобретения.
Настоящее изобретение теперь будет описано более подробно со ссылкой на примеры, которые не являются ограничивающими.
Примеры
Пример 1: Летательный аппарат, предпочтительно БПЛА, транспортируется между стыковочной и приемной станциями
На фиг.1А–1В показана развернутая домашняя станция, включающая стыковочную станцию (4) и приемную станцию (5), которые соединены при помощи средства транспортировки (6), которое, в свою очередь, имеет подвижные средства сцепления (8) и направляющие (9) в данном варианте осуществления. К стыковочной станции (4) пристыкован летательный аппарат (1), предпочтительно БПЛА, оснащенный рамой (2), которая удерживает грузовой модуль (3). В варианте осуществления чертежей платформа (13) включена в стыковочную станцию (4), причем эта платформа (13) поддерживает летательный аппарат (1). Однако следует отметить, что это дополнительная функция, и летательный аппарат (1) может быть закреплен на стыковочной станции (4) также с помощью других средств и предпочтительно дополнительно закреплен еще и на платформе (13). Кроме того, на чертежах четко показана рама (2), соединенная с летательным аппаратом (1) через соединительный механизм (11). Следует отметить, что в некоторых вариантах осуществления соединительный механизм (11) позволяет отсоединять раму (2) от летательного аппарата (1). Следует иметь в виду, что (вместо этого) между грузовым модулем (3) и рамой (2) может присутствовать соединительный механизм, позволяющий отсоединить грузовой модуль (3) от рамы (2).
В варианте осуществления, показанном на фиг.1А–1В, подвижное средство сцепления (8) приспособлено для перемещения всего летательного аппарата (1) с рамой (2) и грузовым модулем (3) вдоль направляющих (9), которыми оснащено средство транспортировки (6). Как видно на фиг.1А, приемная станция (5) содержит несколько прорезей или приемников (16) для приема груза, причем указанные приемники (16) имеют дверцу или отверстие спереди. На фиг.1В аналогичным образом видна дверца на задней стороне грузового модуля (3), через которую груз может быть передан в приемник (16). Обратите внимание, что также могут присутствовать дополнительные аккумуляторы (7b), которыми можно заменить аккумуляторы (7) летательного аппарата (1).
На фиг.2 показан вариант осуществления изобретения с летательным аппаратом (1), все еще зависшим в воздухе рядом со стыковочной станцией (4), где отсутствует платформа. В этом случае другая система сцепления закрепит летательный аппарат (1) на стыковочной станции (4).
На фиг.3А–3D показан увеличенный вид летательного аппарата (1), состыкованного со стыковочной станцией (4). Следует отметить, что на фиг.3А стыковочная станция не имеет посадочной платформы (13), которая представлена на фиг.3В, 3С и 3D. Стыковочная станция (4) имеет антенну (14) для связи с летательным аппаратом (1) и электродвигатель (10) для перемещения средства сцепления (8) по направляющим (9). Кроме того, аккумулятор (блок аккумуляторов) (7) хорошо виден как внешний блок летательного аппарата (1), что позволяет легко заменять его для продления времени работы летательного аппарата. На летательном аппарате (1) имеется система связи (12) для обмена сигналами со стыковочной станцией (4). Стыковочная станция (4) может оснащаться процессором с системой связи для отправки команд летательному аппарату (1). Следует отметить, что платформа (13) на фиг.3B–3D может быть оснащена солнечными панелями. На фиг.3D показана возможность складывания посадочной платформы (13) вниз, когда ни один летательный аппарат (1) не пристыкован (или не пытается пристыковаться). Следует отметить, что на фиг.3С в стыковочной станции (4) также видно средство стыковки (18), причем это средство стыковки (18) специально приспособлено для приема рамы (2), как видно, например, на фиг.3В.
На фиг.4А, 4В, 4С и 4D, в свою очередь, конкретно показаны возможные варианты осуществления грузового модуля (3) и то, как груз может размещаться в его отсеках (17). В этих вариантах осуществления грузовой модуль (3) включает контейнер (15) и одно или более отсеков (17) в виде выдвижных ящиков (17), которые можно открывать или закрывать в контейнере (15) путем выдвижения или задвигания. Ящики (17) могут быть полностью вместе с грузом в них перемещены из грузового модуля (3) в приемник (16). Однако альтернативно, как показано на фиг.7А, 7В, 7С и 7D, отсеки (17) не имеют дна, что позволяет втягивать отсеки (17) в приемник (16), где груз извлекается из отсека (17). Для этого в приемнике (16) уже имеется пандус или он может быть предусмотрен в грузовом модуле (например, выдвигающийся из грузового модуля (3)). После этого отсек или выдвижной ящик (17) можно снова поместить в контейнер (15) грузового модуля (3).
В случае, показанном на фиг.4А, грузовой модуль (3) вмещает один контейнер (15), в котором имеется один отсек (17). На фиг.4В и 4С показан контейнер (15) с двумя отдельными отсеками (17), что позволяет производить выгрузку/загрузку груза через переднюю и тыльную стороны грузового модуля (3). На фиг.4D и 4E показаны варианты осуществления, в которых соответственно два или три отсека (17) имеются с одной стороны, а один отсек (17) – с противоположной стороны.
На фиг.5 показана отсоединенная рама (2) и подвешенный в ней грузовой модуль (3), а также аккумулятор (7) летательного аппарата (1).
На фиг.6А–6D показан возможный вариант процедуры выгрузки груза из грузового модуля (3) в ситуации, когда весь летательный аппарат (1) опущен к приемной станции (5). Обратите внимание, что эта процедура может также применяться к примерам 2 и 3 (и всем другим вариантам) с небольшими изменениями. Кроме того, следует отметить, что на фиг.6A–6D направляющие (9), подвижные средства сцепления (8) и т.д. не показаны, чтобы упростить чертежи и ясно показать процедуру разгрузки.
На фиг.6А показан подход грузового модуля (3) к приемной станции (5) и, в частности, к приемнику (16). Они выстроены таким образом, что отверстие грузового модуля (3) сначала выравнивается относительно приемника (16) (отверстие которого снабжено закрывающейся дверцей). Дверца приемника (16) открывается, и крюковой механизм приемника (16) движется в направлении грузового модуля (3). По выбору, в приемнике (16) может быть предусмотрен пандус для того, чтобы груз медленно спускался в приемник (16). На фиг.6В четко показано, как крюковый механизм взаимодействует с грузовым модулем (3) и, в частности, с его отсеком (17), который может выдвигаться из грузового модуля (3). В этом случае отсек (17) имеет ручку, за которую может цепляться крюковой механизм. Как только крюковой механизм цепляет отсек (17), он снова втягивается в приемник (16), как показано на фиг.6C, что, в свою очередь, вызывает перемещение отсека (17) вместе с крюковым механизмом из грузового модуля (3) в приемник (16). Обратите внимание, что отсек (17) не имеет дна (в качестве альтернативы может быть открывающееся дно), поэтому груз будет скользить вместе с отсеком (17) и падать в приемник (16) (по рампе). Находясь в грузовом модуле (3), груз будет удерживаться контейнером (15) (или, если контейнер отсутствует, дном грузового модуля (3)). После того как груз извлечен из отсека (17), крюковой механизм может снова толкнуть отсек (17) обратно к грузовому модулю (3), как показано на фиг.6D, задвинув его в грузовой модуль (3), после чего крюковой механизм может отсоединиться от отсека (17) и вернуться в исходное положение.
Следует отметить, что описанные выше система и способ могут быть несколько изменены в целях большей универсальности, для распознавания летательных аппаратов со схемным грузовым модулем, и летательных аппаратов с фиксированным грузовым модулем. Если стыковочная станция распознает съемный тип модуля, то подвижное средство сцепления (средство сцепления грузового модуля) отсоединяет грузовой модуль и перемещает его к приемной станции, в то время как сам летательный аппарат остается на стыковочной станции. Если стыковочная станция распознает, что грузовой модуль является фиксированным, то летательный аппарат транспортируется к приемной станции вместе с грузовым модулем.
Пример 2: Летательный аппарат (предпочтительно БПЛА) с отсоединяемым грузовым модулем
Во втором примере система отличается от системы в примере 1 тем, что подвижные средства сцепления (8) и, таким образом, все средства транспортировки (6) приспособлены для транспортировки грузового модуля (3) только между стыковочной станцией (4) и приемной станцией (5). Очевидно, для этого могут потребоваться некоторые изменения в конструкции грузового модуля, чтобы обеспечить надежное соединение между подвижным средством сцепления (8) и грузовым модулем, но возможности здесь разнообразны – от магнитных элементов до зажимов, штекерных разъемов или их комбинаций. Кроме того, это потребует отсоединения (и предпочтительно повторного присоединения) грузового модуля от самого летательного аппарата (1) (и, возможно, от рамы (2) летательного аппарата (1), которая удерживает грузовой модуль). Отсоединение предпочтительно автоматизировано и происходит после подачи сигнала от стыковочной станции (4) на летательный аппарат (1) о том, что летательный аппарат (1) правильно состыкован (возможно, для отсоединения имеются дополнительные средства). Присоединение может быть просто выполнено в обратном порядке.
Помимо этих различий, домашняя станция может быть в целом такой же, как в примере 1, и, таким образом, может быть описана с помощью примеров, показанных на фиг.1А, 1В, 2, 3А–3D и 5. Благодаря интуитивно понятной компоновке на других чертежах специалист в данной области техники может легко увидеть концепцию этого варианта осуществления изобретения, учитывая, что для получения возможности отсоединения грузового модуля (3) от летательного аппарата (1) грузовому модулю потребуется лишь незначительная доработка.
На фиг.7, в частности, показан вариант осуществления, в котором летательный аппарат (1) оснащен съемным грузовым модулем (3), который перемещается между стыковочной станцией (4) и приемной станцией (5). Обратите внимание, что в этом конкретном случае подвижное средство сцепления (8) имеют зажимы, которые приспособлены для сцепления с грузовым модулем (3).
Пример 3: Летательный аппарат (предпочтительно БПЛА) с отсоединяемой рамой
В третьем примере система отличается тем, что летательный аппарат (1) оснащен рамой (2), которая удерживает грузовой модуль (3), причем указанная рама (2) отсоединяется от летательного аппарата (1) (и предпочтительно повторно прикрепляется к нему). Отсоединение предпочтительно автоматизировано и происходит после подачи сигнала от стыковочной станции (4) на летательный аппарат (1) о том, что летательный аппарат (1) правильно состыкован (возможно, для отсоединения имеются дополнительные средства). Присоединение может быть просто выполнено в обратном порядке. Подвижное средство сцепления (8) выполнено с возможностью соединения с упомянутой рамой (2) и для перемещения рамы (2), удерживающей грузовой модуль (3), между стыковочной станцией (4) и приемной станцией (5). Опять же, все предыдущие возможности остаются задействованными, за исключением того, что летательный аппарат (1) находится на стыковочной станции (4), пока рама (2) и грузовой модуль (3) перемещаются. Поэтому приемную станцию (5) не нужно будет сильно модифицировать, поскольку основная концепция остается неизменной. Таким образом, большинство фигур чертежей применимы и в этом случае с небольшими модификациями к варианту осуществления, как описано в данном третьем примере.
Пример 4: Доставка – Обратный груз
В фиг.6D также включен необязательный дополнительный аспект, а именно то, что приемник (16) может быть оборудован новым отсеком (17b), который готовится отправителем до вылета летательного аппарата с домашней станции. Это позволяет летательному аппарату (1) осуществить доставку, затем отойти от стыковочной станции (4), повернуть на 180° и повторно состыковаться. После того, как грузовой модуль (3) передан на приемную станцию (5) и приемник (16), другая сторона грузового модуля (3) подается на приемник (16), который затем может загрузить новый отсек (17b) с грузом для отправки. Приемник (16) может также предоставить необходимую информацию для летательного аппарата (1) (например, данные получателя, характеристики груза и т.д.). На фиг.6D этот новый отсек (17b) виден с правой стороны приемника (16).
В качестве альтернативы, приемная станция (5) может быть снабжена станцией доставки со стороны грузового модуля (3), противоположной стороне приемника (16). Эта станция доставки может загружать предварительно подготовленный отсек в грузовой модуль (3) (в свободное пространство грузового модуля). Это особенно полезно при работе с несколькими «полками» в грузовом модуле (или в контейнере), поскольку станция доставки может быть приспособлена для автоматического поиска незанятого пространства или направлена самим воздушным транспортным средством/грузовым модулем, который знает, какие места свободны.
Предполагается, что настоящее изобретение не ограничивается какой–либо формой реализации, описанной ранее, и что некоторые модификации могут быть добавлены к представленному примеру исполнения без переоценки прилагаемой формулы изобретения. Например, настоящее изобретение было описано со ссылкой на доставку груза, но ясно, что изобретение может быть применено, например, к доставке продуктов питания, лекарств, документов, либо для мытья окон или солнечных панелей, для мониторинга, защиты или ремонта конструкций, либо даже для транспортировки вышедших из строя летательных аппаратов. Кроме того, следует отметить, что изобретение может быть легко применено и для перевозки людей (и/или животных).
Реферат
Изобретение относится к усовершенствованной системе доставки грузов посредством летательных аппаратов, предпочтительно беспилотных, к специально разработанным домашним станциям. Летательный аппарат имеет грузовой модуль, выполненный с возможностью удержания груза и/или пассажиров в одном или более грузовых отсеках грузового модуля. Домашняя станция включает стыковочную станцию для стыковки одного или более летательных аппаратов и, кроме того, оснащена приемной станцией для приема груза и/или пассажиров, которая удалена от стыковочной станции на некоторое расстояние, и, кроме того, включает средство транспортировки, соединяющее стыковочную станцию и приемную станцию. Средство транспортировки выполнено с возможностью перемещения средства сцепления грузового модуля и сцепленного грузового модуля, отсоединенного от сцепленного летательного аппарата, когда летательный аппарат остается неподвижным, между стыковочной станцией и приемной станцией, если грузовой модуль отсоединяется от летательного аппарата, а также с возможностью перемещения как средства сцепления грузового модуля, так и средства сцепления летательного аппарата между стыковочной и приемной станциями, если грузовой модуль неотделим от летательного аппарата. Кроме того, изобретение относится к способу доставки грузов. В результате оптимизируется система доставки грузов, исключается воздействие условий окружающей среды на доставляемые грузы. 2 н. и 16 з.п. ф-лы, 17 ил.
Комментарии