Авиабайк - RU165581U1
Код документа: RU165581U1
Чертежи

Описание
Из уровня техники известны индивидуальные средства полета различных конструкций, компоновка которых, в общем виде включает несущую раму с расположенным на ней посадочным местом пилота (и, при возможности, пассажира) со средствами управления и жестко связанные с платформой движители, как правило, представляющие собой винтовые двигатели (электрические или бензиновые), плоскость вращения лопастей которых располагают горизонтально. Примером такой конструкции может являться авиабайк Aero-X согласно http://www.gadgetblog.ru/9231/. Принцип эксплуатации подобных устройств прямо основан на их конструкции и включает первоначальную фазу вертикального отрыва от земли и последующий переход в горизонтальный полет.
Вместе с тем, конструкции известных автору летательных аппаратов обладают рядом существенных недостатков - фиксированное расположение двигателей по отношению к раме снижает устойчивость и управляемость аппарата, а отказ одного из двигателей (в случае двух-, трех - и четырех-двигательной схемы (например как у указанного выше аналога) влечет неминуемую аварию.
Таким образом, задача решаемая при создании заявленного устройства, состоит в преодолении указанных выше недостатков известных конструкций, при этом технический результат, достигаемый при решении поставленной задачи, состоит в повышении безопасности эксплуатации устройства за счет повышения его управляемости и устойчивости в полете, а также безаварийности в случае отказа одного или нескольких двигателей.
Для достижения поставленного результата предлагается в конструкции авиабайка, содержащей платформу с посадочным местом и средствами управления и связанные с ней движители, движители выполнить в виде нескольких автономных беспилотных летательных аппаратов (БПЛА), расположенных по разные стороны относительно платформы, связь каждого из БПЛА с платформой выполнить в виде тяги, шарнирно соединенной с платформой с одной стороны и с БПЛА - с другой, при этом шарнирное соединение с платформой выполнено в виде одноосевого шарнира, а с БПЛА - в виде двухосевого.
Тяги соединения платформы с БПЛА могут быть снабжены средствами электро -, гидроуправления и/или демпфирующими устройствами. В качестве БПЛА могут быть использованы моно-, мультикоптеры, конвертопланы или т.п. дроны. Платформа может содержать дополнительное пассажирское посадочное место или место для размещения груза, либо автономный источник электроэнергии в случае применения БПЛА с электрическими двигателями. Каждый из БПЛА может быть снабжен автономной системой позиционирования в пространстве, и, все вместе - системой точного взаимного позиционирования. Непосредственно авиабайк может быть снабжен системой автопилотирования и/или системой управления с земли.
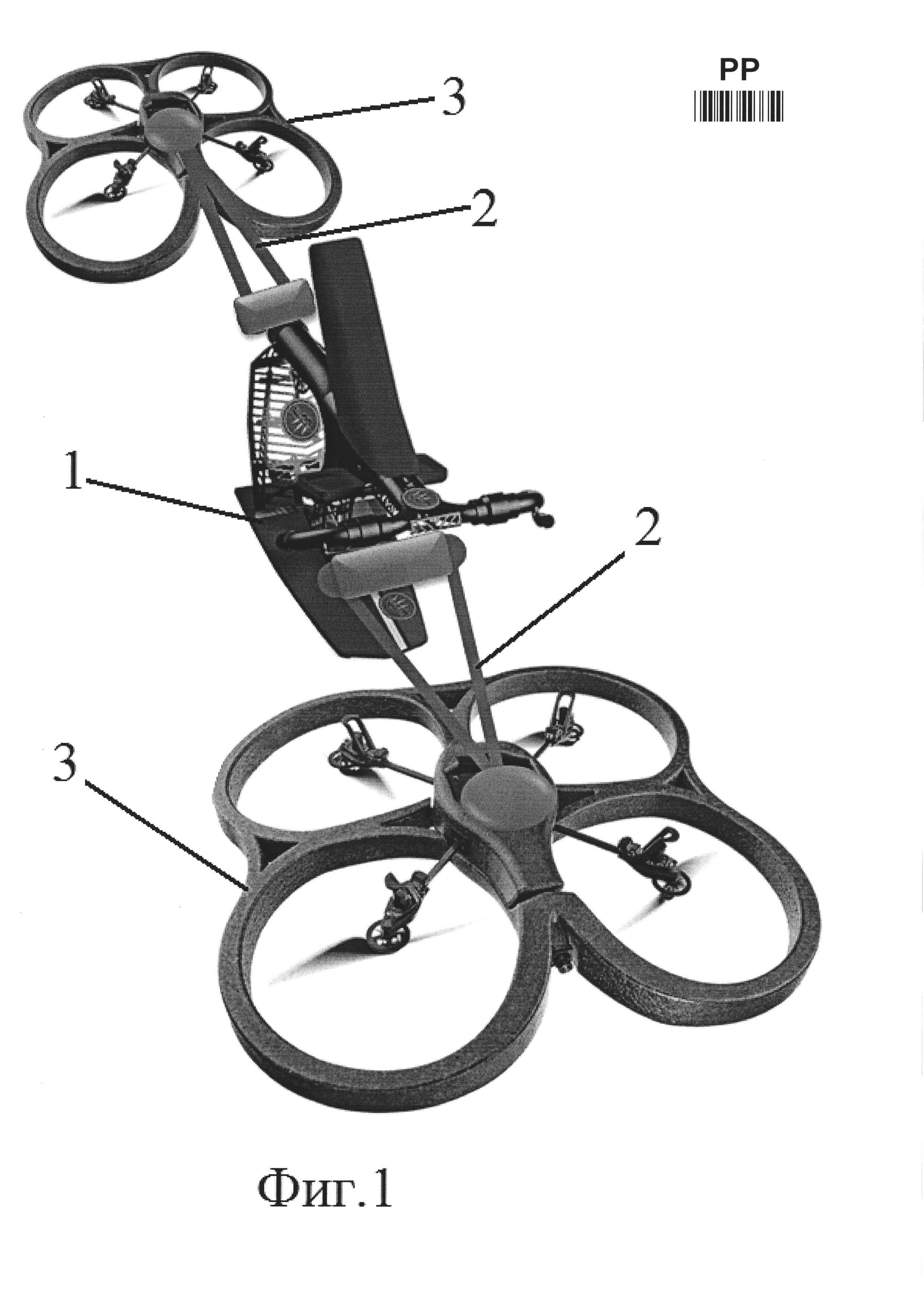
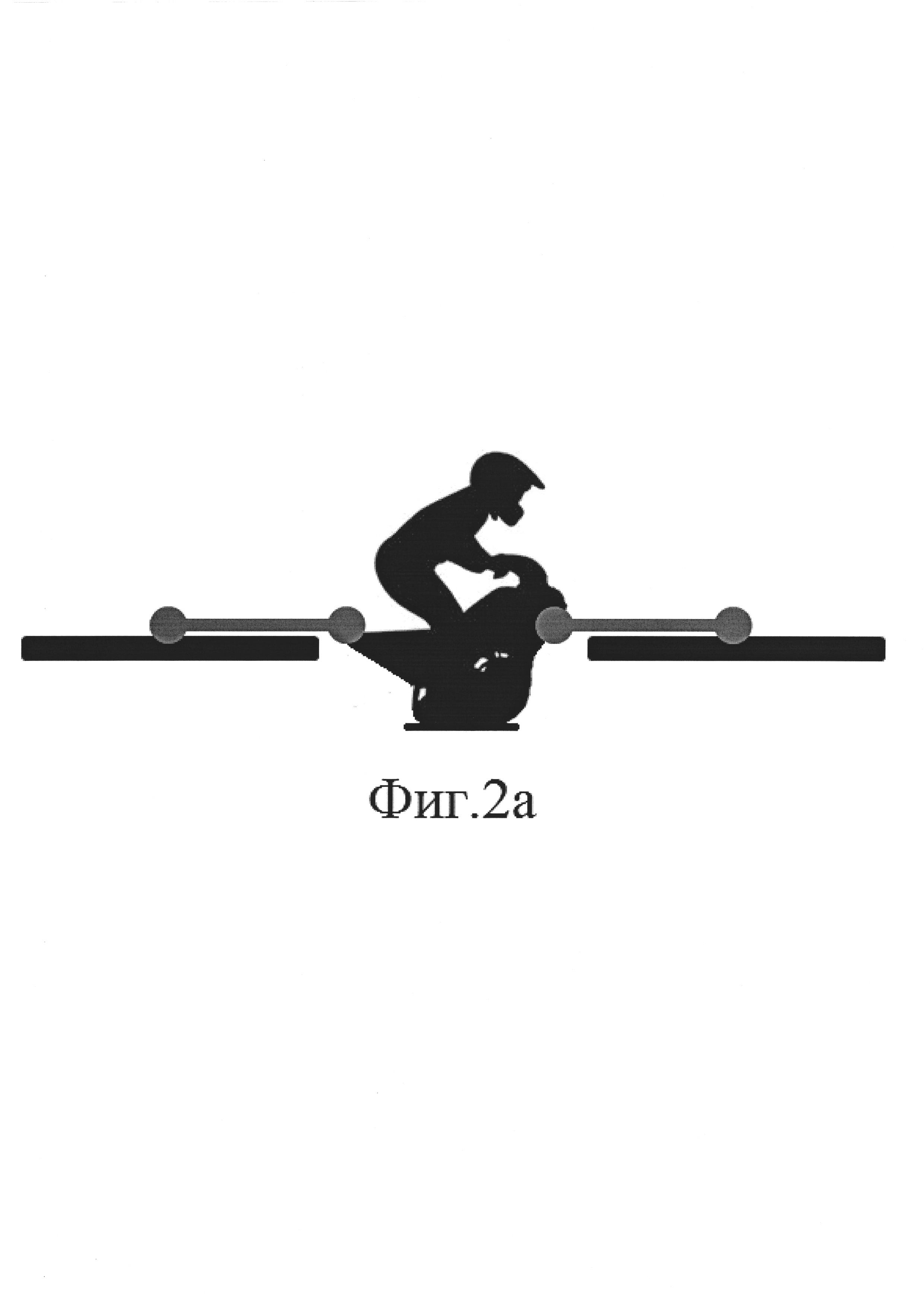
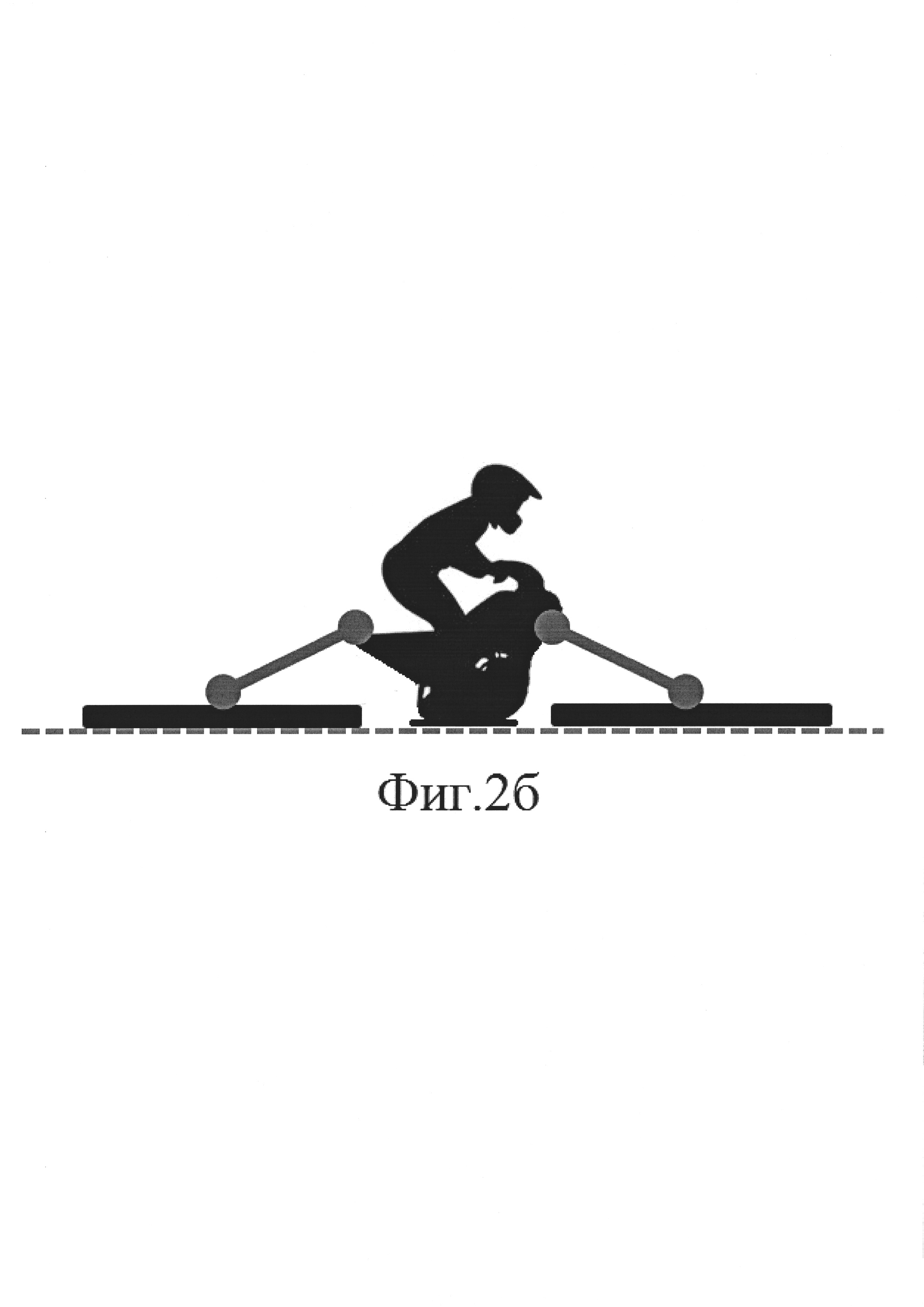
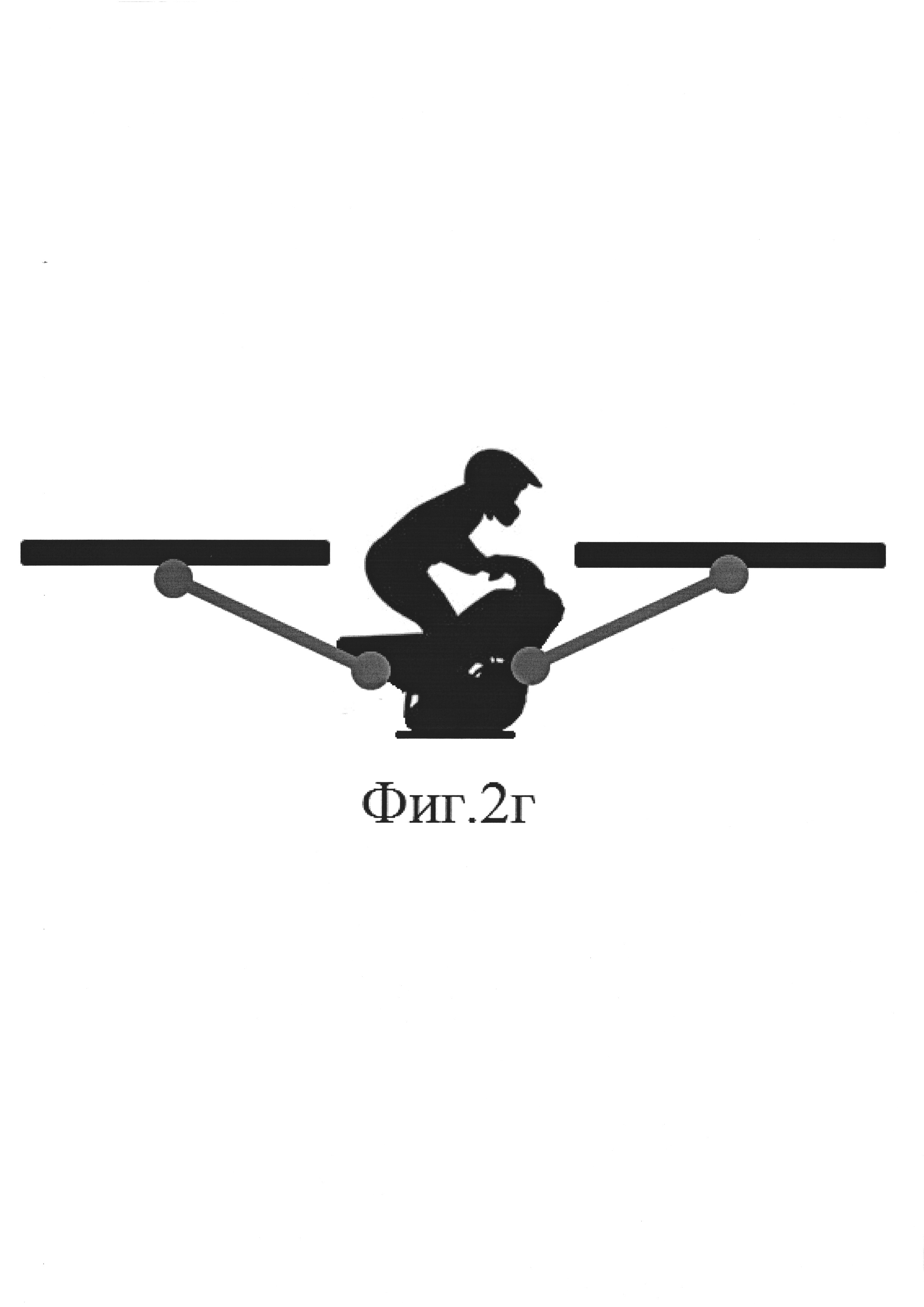
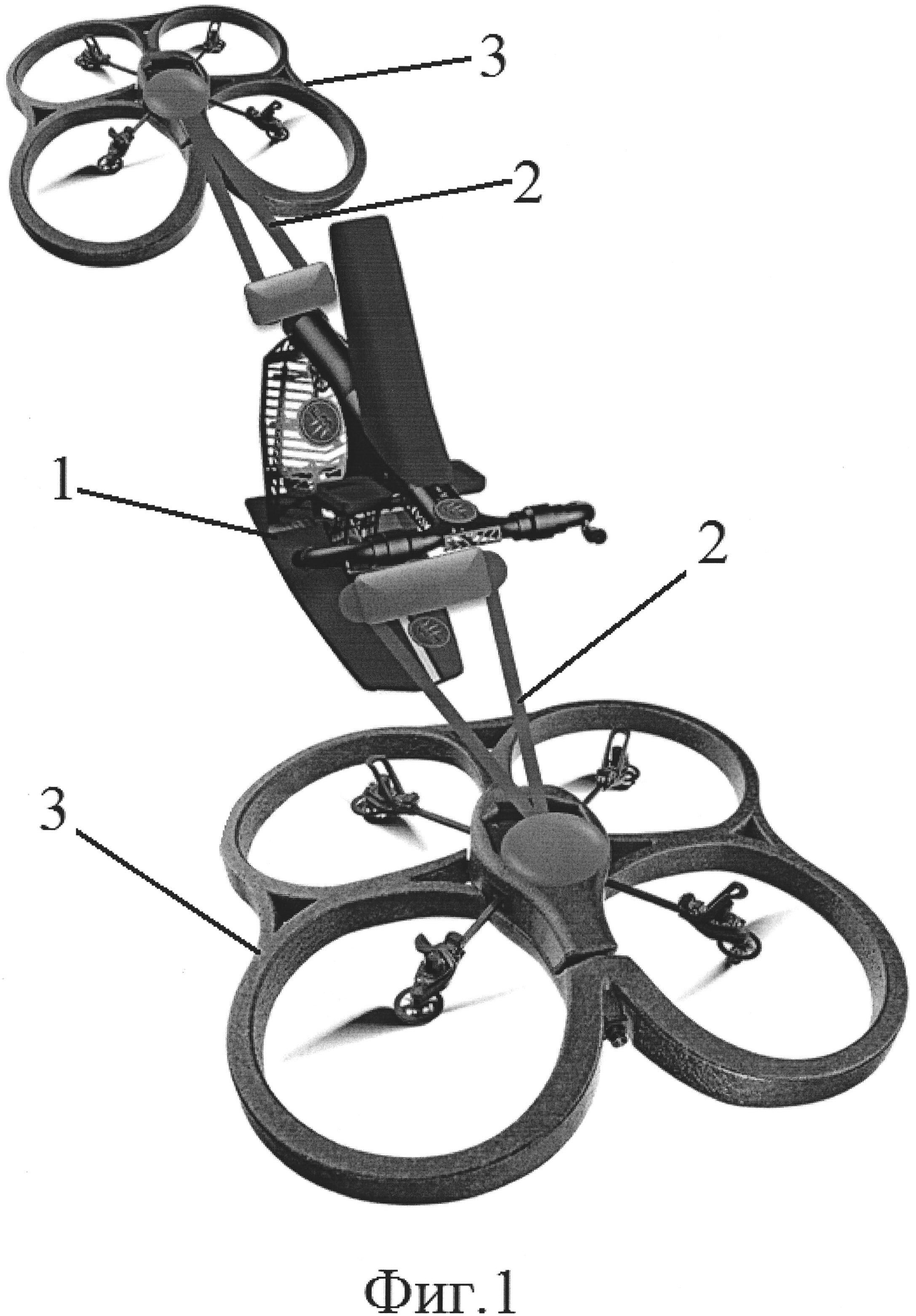
Полезная модель иллюстрируется концептуальной схемой конструкции (фиг. 1), а также схемами возможного расположения движителей по отношению к платформе в процессе эксплуатации аппарата (фиг. 2а-2г)
В общем виде конструкция заявленного авиабайка включает платформу 1 с посадочным местом, как минимум, пилота и средствами управления (рулем). Очевидно, что наличие дополнительного посадочного места пассажира (ов) и размещение грузов решается компоновкой платформы, что само по себе не является предметом настоящей полезной модели. С платформой посредством тяг 2 связаны два или более беспилотных летательных аппарата (БПЛА) 3, являющихся элементами обеспечения движения (полета) всего авиабайка в целом. Каждая из тяг связана с платформой посредством одноосевого шарнира, а с соответствующим БПЛА -посредством двухосевого, в обоих случаях - с возможностью фиксации в требуемом положении. Подобное шарнирное соединение позволяет, с одной стороны, регулировать положение БПЛА относительно платформы (выше, ниже, на одном уровне, в том числе, расположение БПЛА на разных уровнях), а с другой - регулировать угловое положение каждого из БПЛА (а, следовательно, и их несущих винтов) - см. фиг. 2а-2г. Для осуществления возможности такой регулировки каждый БПЛА снабжен средствами определения положения в пространстве (акселерометры, датчики угловых скоростей и т.п.) и точного взаимного положения по отношению к другому (им) БПЛА (ультразвуковые, радио или оптические системы локального позиционирования), а также связывают с системой управления авиабайка (автопилотом/бортовым вычислителем).
Рассмотрим преимущества указанного шарнирного крепления на примере авиабайка с двумя БПЛА в качестве движителей, расположенных спереди и сзади платформы (см. фиг. 1). Двухосевые шарниры по существу выполняют роль независимой подвески (передней и задней, соответственно) с целью управления, которое осуществляется независимым маневрированием переднего и заднего БПЛА. В свою очередь, одноосевое шарнирное крепление БПЛА к платформе обеспечивает, с одной стороны, их расположение ниже центра массы на земле, и выше - в воздухе, что, в свою очередь, гарантирует максимальную устойчивость в обоих состояниях.
В числе дополнительных преимуществ заявленного авиабайка следует упомянуть то, что в конструкции платформы предусмотрены электрогенератор с топливными баками или иные источники электропитания двигателей БПЛА (аккумуляторы и/или топливные элементы), в связи с чем отпадает необходимость в размещении подобных элементов непосредственно на БПЛА, что, с одной стороны, существенно облегчает и упрощает их конструкцию, при этом исключая необходимость комплектации авиабайка топливопроводными и т.п. системами - с другой, также существенно повышает эффективность эксплуатации и ремонтопригодность авиабайка.
Реферат
1. Авиабайк, содержащий платформу с посадочным местом и средствами управления и связанные с ней движители, отличающийся тем, что движители выполнены в виде нескольких автономных беспилотных летательных аппаратов (БПЛА), расположенных по разные стороны относительно платформы, связь каждого из БПЛА с платформой выполнена в виде тяги, шарнирно соединенной с платформой с одной стороны и с БПЛА - с другой, при этом шарнирное соединение с платформой выполнено в виде одноосевого шарнира, а с БПЛА - в виде двухосевого.2. Авиабайк по п. 1, отличающийся тем, что тяги соединения платформы с БПЛА снабжены средствами электроуправления.3. Авиабайк по п. 1, отличающийся тем, что тяги соединения платформы с БПЛА снабжены средствами гидроуправления.4. Авиабайк по любому из пп. 1-3, отличающийся тем, что тяги соединения платформы с БПЛА снабжены демпфирующими устройствами.5. Авиабайк по любому из пп. 1-3, отличающийся тем, что в качестве БПЛА использованы монокоптеры.6. Авиабайк по любому из пп. 1-3, отличающийся тем, что в качестве БПЛА использованы мультикоптеры.7. Авиабайк по любому из пп. 1-3, отличающийся тем, что в качестве БПЛА использованы конвертопланы.8. Авиабайк по любому из пп. 1-3, отличающийся тем, что платформа содержит дополнительное пассажирское посадочное место.9. Авиабайк по любому из пп. 1-3, отличающийся тем, что платформа содержит место для размещения груза.10. Авиабайк по любому из пп. 1-3, отличающийся тем, что платформа содержит автономный источник электроэнергии, а двигатели БПЛА электрические.11. Авиабайк по любому из пп. 1-3, отличающийся тем, что каждый из БПЛА снабжен автономной системой позиционирования в пространстве, и все вместе -системой точного взаимного позиционирования.12.
Формула
Комментарии