Способ управления мультироторной летающей платформой - RU2781442C1
Код документа: RU2781442C1
Чертежи

Описание
Мультироторная летающая платформа относится к области авиации и предназначена для вертикального и горизонтального перемещения в воздушной среде людей и грузов в пилотируемом и беспилотном варианте, а также в качестве подъемного устройства типа «летающий кран».
Способ управления мультироторной летающей платформой предназначен для повышения безопасности эксплуатации мультироторной летающей платформы.
В настоящее время широкое распространение получили мультироторные летающие машины, или мультикоптеры.
Мультироторная летающая платформа состоит из нескольких роторных ячеек, которые, могут непосредственно присоединяться к полезной нагрузке или собираться в сборки с помощью фермы.
Наиболее часто используемой схемой в настоящий момент является квадрокоптер, когда летающая платформа имеет четыре подъемные ячейки. Малоразмерные летательные аппараты такой конструкции выпускают десятки фирм по всему миру. Однако аппарат большой грузоподъемности способный поднимать людей не так много. Один из них например CityAirbus https://www.airbus.com/innovation/zero-emission/urban-air-mobility/cityairbus.html. (см. Фиг. 3) рассматривается как аналог.
Недостатком указанной конструкции является плохая маневренность в горизонтальной плоскости. Чтобы перемещаться в горизонтальной плоскости необходимо разностью тяги ячеек наклонять весь летательный аппарат.
Проблема управляемости в горизонтальной плоскости и защита винтов от попадания посторонних предметов решена в патенте RU 2721325, который выбран за прототип. Согласно этому патенту мультироторная летающая платформа выполнена с возможностью вертикального и горизонтального перемещения и включает по крайней мере четыре роторные ячейки, закрепленные с помощью мачт на платформе. Роторные ячейки содержат каждая по два воздушных винта, установленных в ступицах с возможностью встречного вращения от привода силовой установки, и охватывающие винты обечайки. Нижняя часть обечайки закреплена неподвижно на ступице и шарнирно относительно мачты с возможностью изменения угла наклона.
Недостатком управления как аналога, так и прототипа является низкая надежность при отказе одной из ячеек. В случае выхода из строя одной подъемной ячейки возникает опрокидывающий момент создаваемый обобщенной подъемной силой оставшимися в работе ячейками и силой тяжести всей платформы. Чтобы скомпенсировать этот момент приходится выключать еще одну ячейку противоположную той, которая вышла из строя. При этом удвоенная нагрузка ложиться на оставшиеся в работе ячейки.
Задачей способа управления летающей мультироторной платформы является обеспечение надежности и безопасного полета при отказе одной или нескольких роторных ячеек.
Положительный эффект обеспечивается благодаря предложенному способу управления мультироторной летающей платформой.
Поставленная задача решается благодаря тому, что способ управления мультироторной летающей платформой с возможностью вертикального и горизонтального перемещения осуществляется посредством привода от силовой установки синхронно или автономно, связанного с не менее чем четырьмя роторными ячейками, закрепленными на платформе посредством мачт с возможностью изменения их длины и угла наклона с пульта управления и содержащими каждая по два воздушных винта встречного вращения и обечайку. Согласно изобретению при выходе из строя любой из роторных ячеек, баланс подъемной силы и центра тяжести платформы обеспечивают изменением пространственного положения работающих роторных ячеек, посредством индивидуального регулирования длины и угла наклона мачты каждой роторной ячейки с одновременным перераспределением мощности силовой установки и увеличением тяги работающих роторных ячеек.
Преимуществом предложенного технического решения является возможность продолжить полет при отказе какой-либо подъемной ячейки без необходимости отключения другой ячейки - симметричной относительно общему центру тяжести. Это позволяет обеспечить безопасность платформы за счет сохранения лучшей управляемости. В случае отказа всех ячеек, обеспечивают изменение пространственного положения всех мачт, посредством индивидуального регулирования их длины и угла наклона для освобождения пространства для возможности раскрытия парашютной системы, находящейся в центре тяжести платформы.
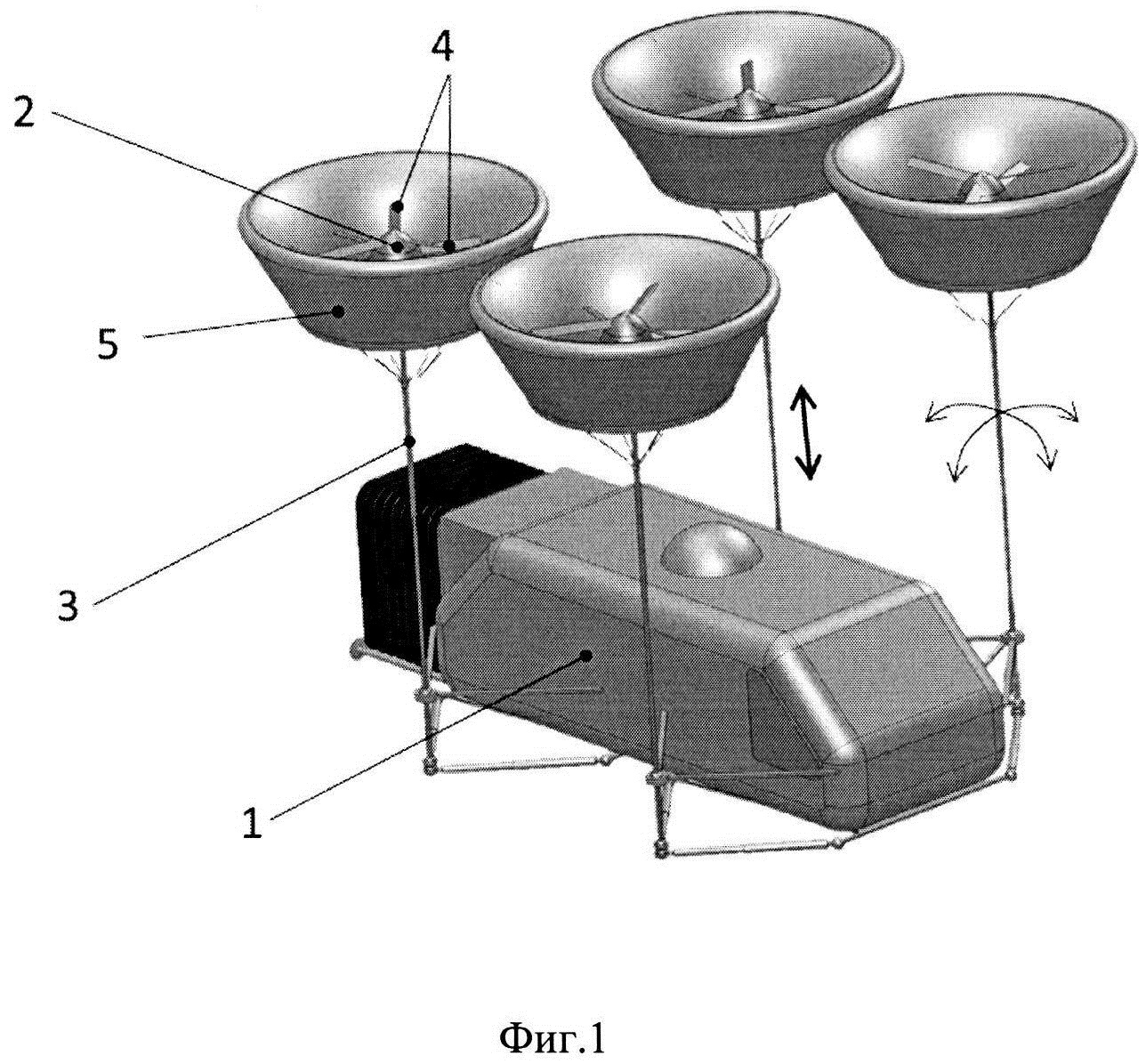
На фиг. 1. изображена мультироторная летающая платформа в режиме вертикального взлета со всеми работающими роторными ячейками.
На фиг. 2. показан вид сверху на платформу.
На фиг. 3 представлен известный аналог - CityAirbus (https://www.airbus.com/innovation/zero-emission/urban-air-mobility/cityairbus.html)
Мультироторная летающая платформа 1, выполнена с возможностью вертикального и горизонтального перемещения посредством привода от силовой установки (на фиг. не показано). Привод синхронно или автономно связан с роторными ячейками 2, закрепленными на платформе 1 посредством мачт 3. Мачты установлены с возможностью изменения длины и угла их наклона относительно платформы с пульта управления (на фиг. не показано). Роторных ячеек предпочтительно должно быть четное количество и не менее четырех. Каждая роторная ячейка 2 содержит по два воздушных винта 4 встречного вращения, приводимых во вращение, например электродвигателем. Винты защищены обечайкой 5. При уравновешенном положении роторных ячеек 2 платформа 1 имеет центр тяжести 6 расположенный на одинаковом расстоянии от всех работающих ячеек (см. Фиг. 2).
Способ управления мультироторной летающей платформой основан на принципе равновесия, создаваемой подъемной силы, работающими роторными ячейками и центром тяжести платформы.
Для примера рассмотрим мультироторную летающую платформу с четырьмя ячейками (фиг. 1).
В штатном режиме вертикального взлета или горизонтального полета на малой скорости все роторные ячейки 2 устанавливают на одинаковом расстоянии R от центра тяжести 6 платформы 1 и работает только штатная система управления на основе поворота ячеек на концах мачт (фиг. 2).
При выходе из строя любой из роторных ячеек, баланс подъемной силы и центра тяжести платформы обеспечивают изменением пространственного положения работающих роторных ячеек, посредством индивидуального регулирования длины и угла наклона мачты каждой роторной ячейки и одновременным перераспределением нагрузки (тяги) на работающих роторных ячейках.
Предложенное техническое решение обеспечивает увеличение надежности и безопасности управления полетом мультироторной летающей платформы.
Источники информации:
1. Статья в Интернете: City Airbus https://www.airbus.com/innovation/zero-emission/urban-air-mobility/ cityairbus.html.
2. Патент RU 2721325, МПК B64C 27/20, 2018 г. - прототип
Реферат
Изобретение относится к области авиации, в частности к способам управления летательными аппаратами. Мультироторная летающая платформа выполнена с возможностью вертикального и горизонтального перемещения посредством привода от силовой установки, связанной с четырьмя роторными ячейками, каждая с двумя воздушными винтами встречного вращения и обечайкой, закрепленными на платформе посредством мачт. Мачты выполнены с возможностью изменения их длины и угла наклона относительно платформы по команде с пульта управления. При выходе из строя любой из роторных ячеек командой с пульта управления обеспечивают баланс подъемной силы работающих роторных ячеек и центра тяжести платформы за счет индивидуального изменения пространственного положения каждой работающей роторной ячейки с одновременным перераспределением мощности силовой установки на работающие роторные ячейки для увеличения их тяги. Обеспечивается повышение безопасности управления платформой. 3 ил.
Формула
Документы, цитированные в отчёте о поиске
Мультироторная летающая платформа
Комментарии