Мультироторная летающая платформа - RU2721325C2
Код документа: RU2721325C2
Чертежи


Описание
Мультироторная летающая платформа относится к области авиации и предназначена для вертикального и горизонтального перемещения в воздушной среде людей и грузов в пилотируемом и беспилотном варианте, а так же в качестве подъемного устройства типа «летающий кран».
Мультироторная летающая платформа состоит из нескольких (не менее четырех) роторных ячеек, которые, могут непосредственно присоединяться к полезной нагрузке или собираться в сборки с помощью фермы.
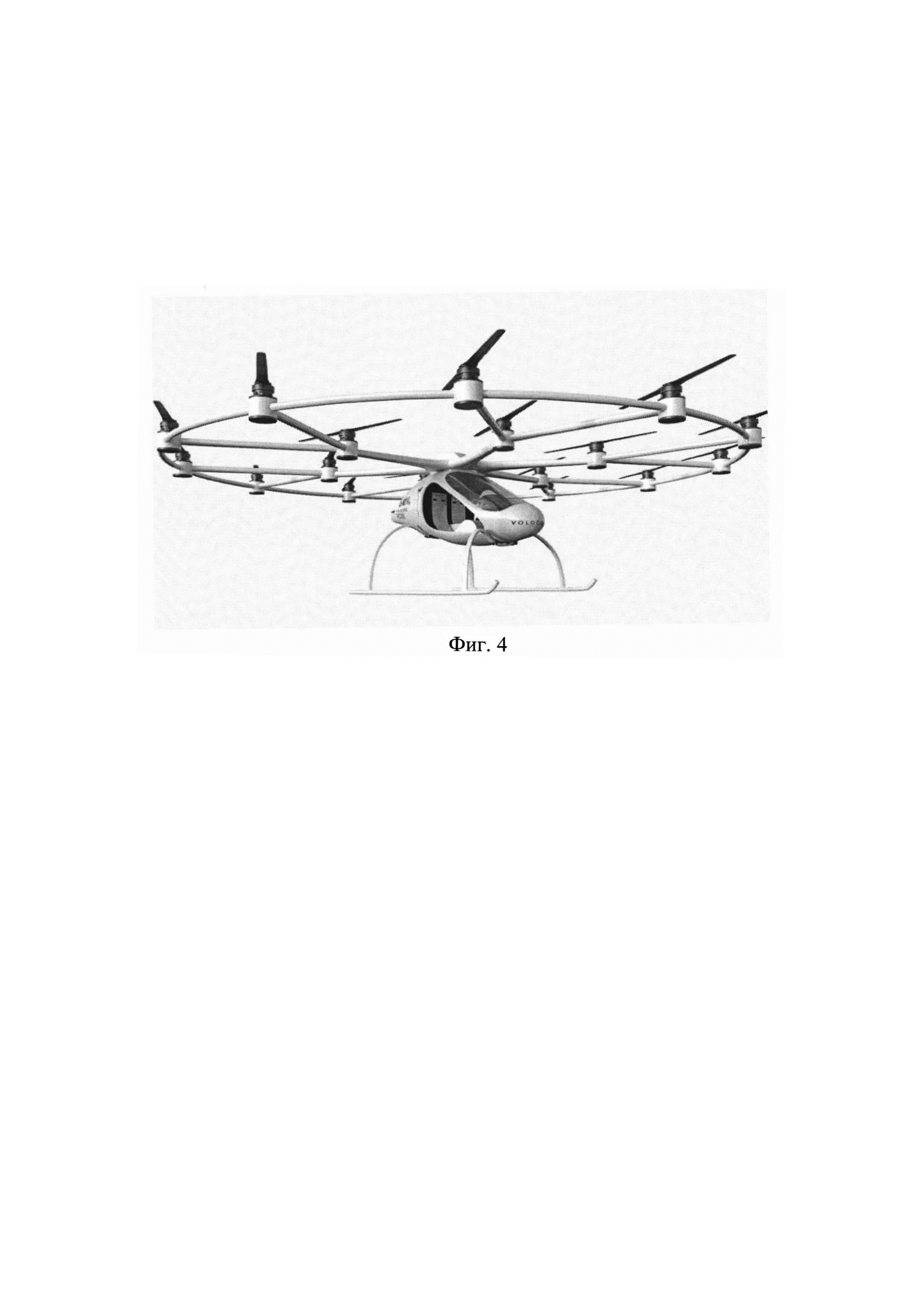
Известен летательный аппарат, использующий для создания подъемной силы и управления группу воздушных винтов (ячеек) установленных на платформе. Такие как мультироторная платформа в патенте США US 3614030 и грузоподъемный аппарат, описанный в Интернете на странице: Volocopter https://www.volocopter.com/de/ (фиг. 4).
Недостатком указанных технических решений является плохая маневренность в горизонтальной плоскости. Отсутствие механизмов отклонения струй винтов, приводит к наклону всей платформы. Не решена проблема безопасности при касаниях воздушных винтов с внешними препятствиями, например с ветками деревьев и проводами.
Проблема управляемости в горизонтальной плоскости частично решена в конструкции геликоптеров, описанных в патентах WO 8400339, 1984 г., В64С 27/10 и DE 19860609, 2000 г., В64С 27/08. В указанных патентах воздушные винты закреплены на шарнирном узле и могут наклоняться в двух плоскостях, обеспечивая при этом перемещение летательного аппарата по горизонтали.
Это легкие геликоптеры, предназначенные для подъема малого веса (одного пилота), имеющие одну пару винтов не дающие достаточного прироста подъемной силы. Низкое расположение воздушных винтов непосредственно над сидением пилота приводит при взлете и посадке к нежелательному воздействию струи воздуха от винтов на землю и саму конструкцию.
Проблема ограждения винтов и создание дополнительной подъемной силы частично решена в патенте US 2015053826, 2015 г., В64С 27/20, где ячейки воздушных винтов заключены в аэродинамическую жесткую обечайку.
Недостаток конструкции данной установки заключается в том, что примененный аэродинамический профиль обечайки не дает значительного прироста подъемной силы, при этом жесткая обечайка не дает полную защиту от возможных ударов и столкновений с внешними препятствиями.
Задачей изобретения является увеличение грузоподъемности мультироторной летающей платформы, улучшение ее управляемости (маневренности), безопасности использования, а так же расширение сферы ее использования за счет модульности конструкции.
Положительный эффект обеспечивается благодаря предложенному конструктивному решению мультироторной летающей платформы.
Поставленная задача решается благодаря тому, что мультироторная летающая платформа с возможностью вертикального и горизонтального перемещения, включает не менее четырех роторных ячеек закрепленных на платформе и содержащих каждая по два воздушных винта, установленных в ступице с возможностью встречного вращения от привода силовой установки и обечайку, охватывающую винты. Согласно изобретению, обечайка каждой роторной ячейки выполнена в виде расширяющегося к верху жесткого диффузора с эластичной формообразующей оболочкой снаружи, при этом диаметр верхней части обечайки составляет от 1.5 до 3 диаметров воздушного винта, а нижняя часть обечайки закреплена неподвижно на ступице, при этом ступица с воздушными винтами и обечайкой шарнирно закреплены на мачте с возможностью изменения угла наклона роторной ячейки посредством регулируемых по длине тяг, по крайней мере, не менее двух, закрепленных одним концом на ступице, а другим на мачте. Диаметр внешней части обечайки может варьироваться в зависимости от степени раздутия эластичной оболочки. Относительно мачты ступица с обечайкой может отклоняться на угол до 20 градусов в любую сторону. Длина каждой мачты составляет не менее двух диаметров воздушного винта для снижения воздействия на платформу от аэродинамической струи воздушных винтов. Роторные ячейки, как при вертикальном, так и при горизонтальном перемещении платформы могут работать, как синхронно, так и автономно и так же изменять частоту вращения воздушных винтов.
Преимуществом предложенного технического решения является предложенный профиль обечайки в виде диффузора, входной диаметр которого не менее чем в 1.5 до 3 раза больше диаметра воздушного винта. Обечайка снаружи снабжена эластичной надувной оболочкой, которая при подаче избыточного давления принимает обтекаемую форму, например тороидальной оболочки. Это позволяет значительно повысить грузоподъемность каждой ячейки и в целом всей платформы при тех же затратах мощности привода. Надувная торообразная оболочка надежно защищает вращающиеся воздушные винты от соударений с внешними препятствиями. Обечайка вместе со ступицей и воздушными винтами, шарнирно закрепленными на мачте высотой не менее двух диаметров воздушного винта, что уменьшает воздействие от аэродинамической струи воздушных винтов на конструкцию платформы и поверхность земли. С помощью управляемых тяг каждая роторная ячейка благодаря шарнирному закреплению на мачте, может наклоняться относительно мачты в двух плоскостях на угол до 20 градусов, увеличивая маневренность всей платформы. Управляемость платформы достигается также за счет изменения оборотов воздушных винтов и изменения угла наклона каждой роторной ячейки относительно мачты, как синхронно, так и автономно. Использование нескольких роторных ячеек на одной платформе обеспечивает надежную эксплуатацию и устойчивый полет всей платформы. Мачты роторных ячеек можно крепить как непосредственно к грузу в количестве не менее четырех, так и соединять их в сборки с помощью дополнительной фермы любой конструкции. В зависимости от массы груза и требуемого запаса надежности число ячеек в сборке мультироторной платформы можно увеличивать (изменять). Этим достигается оптимальность использования и расширение сферы применения данного изобретения.
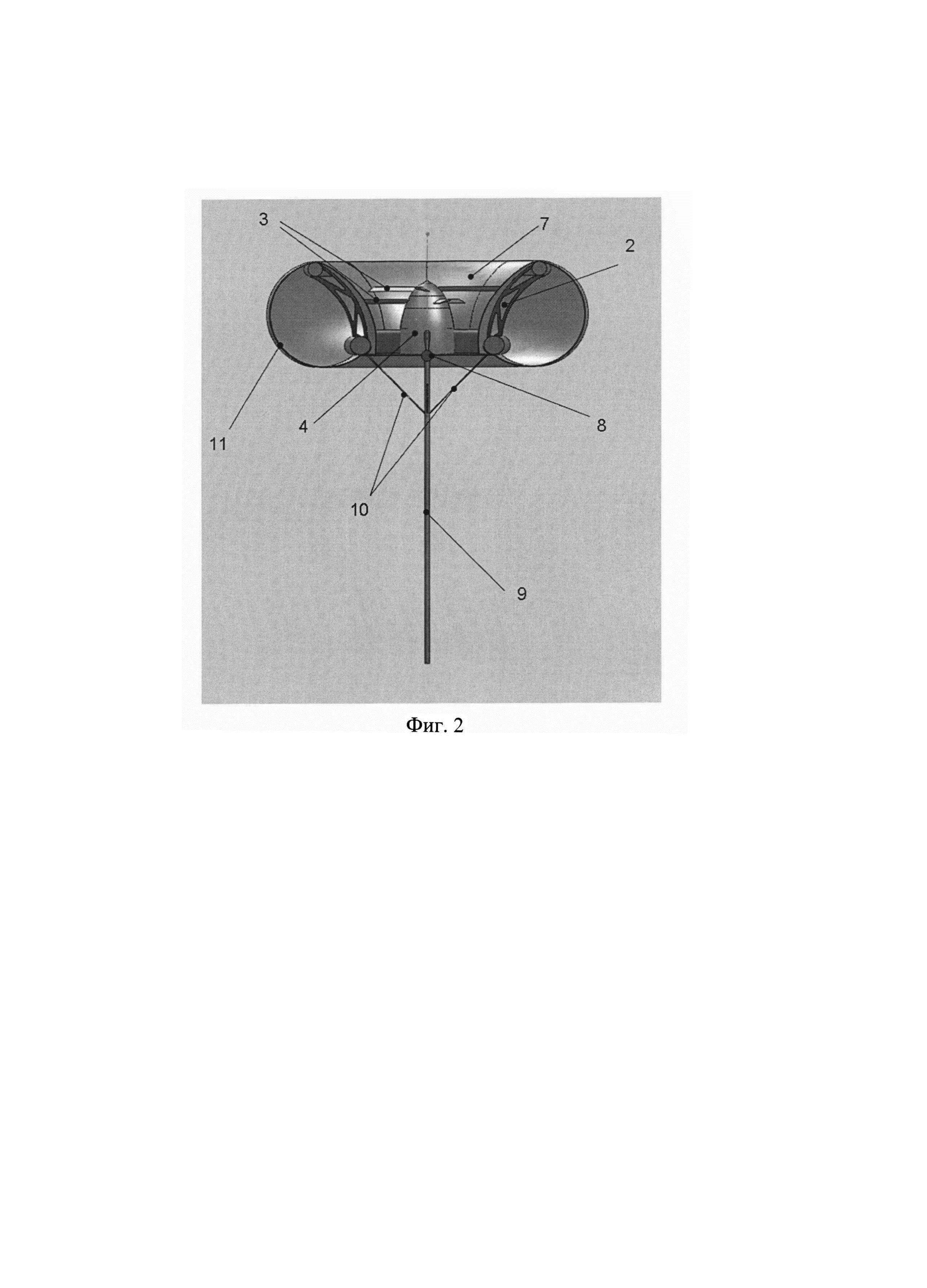
На фиг. 1. изображена мультироторная летающая платформа. На фиг. 2 продольный разрез роторной ячейки мультироторной платформы. На фиг. 3. мультироторная платформа ферменного типа. На фиг. 4 - Volocopter https://www.volocopter.com/de/.
Описание конструкции мультироторной летающей платформы.
Мультироторная летающая платформа 1 выполнена с возможностью вертикального и горизонтального перемещения (фиг. 1). На платформе симметрично расположены не менее четырех роторных ячеек 2 (фиг. 2), содержащих каждая по два воздушных винта 3, установленных в ступице 4 с возможностью встречного вращения от привода 5 силовой установки 6. На ступице 4 неподвижно закреплена обечайка 7, охватывающая воздушные винты 3. Обечайка 7 каждой роторной ячейки 2 выполнена в виде расширяющегося кверху жесткого диффузора с диаметром в верхней части, равным от 1.5 до 3 диаметров охватываемых воздушных винтов 3. Диаметр нижней части обечайки может изменяться в зависимости от степени раздутия наружной эластичной оболочки. Ступица 4 с воздушными винтами 3 и обечайкой 7 посредством шарнира 8 закреплена на мачте 9 с возможностью изменения угла наклона роторной ячейки 2 от вертикального положения до необходимого угла наклона для придания движению мультироторной летающей платформе горизонтальной составляющей. Изменение угла наклона роторных ячеек 2 осуществляют посредством регулируемых по длине тяг 10, по крайней мере, не менее двух тяг на каждую роторную ячейку, которые крепятся одним концом на ступице 4, а другим на мачте 9 на некотором расстоянии от шарнира 8. Это позволяет наклонять ячейку в любую сторону на угол до 20 градусов. Мачта 9 имеет длину не менее 2 диаметров воздушного винта для уменьшения влияния аэродинамической струи из-под нижней части обечайки 7 на платформу и груз (фиг. 3). Обечайка 7 снаружи выполнена с герметичными эластичными, формообразующими оболочками 11, которые по мере подачи избыточного давления в них принимают, например, тороидальную форму. Эластичная оболочка 11 может компенсировать удары при столкновении платформы о преграды и уменьшать силу аэродинамического сопротивления платформы при полете. Нижняя часть платформы может быть выполнена в виде фермы из нескольких сборных элементов с полезным грузом. Роторные ячейки 2, как при вертикальном, так и при горизонтальном перемещении могут работать, как в синхронном, так и автономном режиме.
Мультироторная летающая платформа работает следующим образом.
Пока платформа 1 стоит на земле, на ней размещают полезный груз. Груз либо складывают на платформу (фиг. 1), либо подвешивают к платформе если она выполнена в виде фермы (фиг. 3). Запускают силовую установку 6 и работу привода 5 и соосные воздушные винты 3 в роторных ячейках 2 начинают вращаться. Струя воздуха в обечайках 7 отбрасывается сверху вниз, создавая часть подъемной силы за счет наружных эластичных оболочек 11, другая часть подъемной силы создается за счет жесткого диффузора обечайки в силу того, что перед воздушными винтами 3 создается зона пониженного давления. Таким образом, подъемная сила каждой роторной ячейки 2 с воздушными винтами 3 и с обечайкой 7 больше, чем от воздушных винтов 3 без обечайки 7 (открытые винты) при той же подводимой мощности. С увеличением оборотов воздушных винтов платформа 1 отделяется от земли и поднимается на заданную высоту. За счет того, что роторные ячейки 2 установлены на достаточно высоких мачтах 9 воздействие отбрасываемых струй воздуха от воздушных винтов на землю и на саму платформу уменьшается, что увеличивает безопасность и удобство эксплуатации. Ступица 4 с воздушными винтами 3 посредством шарнира 8 закреплена на мачте 9 и управляется тягами 10, которые могут изменять наклон ячейки относительно мачты на угол до 20 градусов. Для возможности быстрого наклона ячейки без возникновения дестабилизирующих гироскопических моментов в конструкции используются соосные воздушные винты. Совместным либо автономным наклоном ячеек относительно своих мачт может достигаться любой маневр в горизонтальной плоскости, например вперед, назад, вправо, влево, поворот относительно вертикальной оси по команде с пульта управления, (на фиг. не показано), причем пульт управления может находиться удаленно. При этом само положение платформы может оставаться горизонтальным. Для изменения высоты полета увеличивают или уменьшают обороты воздушных винтов всех ячеек. Для наклона платформы можно так же управлять как наклоном ячеек так и оборотами винтов. При этом можно обеспечить любые маневры в горизонтальной плоскости с наклоненной на заданный угол платформой. Безопасность летающей платформы при столкновениях с препятствиями обеспечивают эластичными оболочками 11 обечаек, которые надувают например от динамического давления струй отметаемого воздушными винтами воздуха. Энергия столкновения таким образом гасится при деформации эластичной оболочки 11 (фиг. 2). Отказоустойчивость платформы обеспечивается тем, что используется минимум четыре ячейки, суммарная максимальная тяга которых в два раза превышает взлетный вес платформы. При отказе одной ячейки выключают симметричную ей ячейку и производят безопасную посадку на оставшихся ячейках. При увеличении количества ячеек запас по мощности можно уменьшать, либо повысить степень отказоустойчивости всей платформы (фиг. 3). Увеличение удобства эксплуатации и расширение сферы применения мультироторной летающей платформы достигается за счет модульности конструкции. Количество ячеек должно быть не менее четырех, а дальше их количество можно увеличивать в зависимости от веса полезной нагрузки и требуемого запаса надежности.
Предложенное техническое решение обеспечивает увеличение грузоподъемности мультироторной летающей платформы, улучшение управляемости (маневренности), безопасности использования и широкую область применения для подъема габаритных грузов в труднодоступных местностях в качестве подъемного устройства типа «летающий кран».
Источники информации
1. Патент US 3614030, МПК В64С 29/04, 1971 г.
2. Статья в Интернете: Volocopter https://www.volocopter.com/de/.
3 Патент WO 8400339, 1984 г., МПК В64С 27/10.
4. Патент DE 19860609, 2000 г., МПК В64С 27/08.
5. Патент US 2015053826,2015 г., МПК В64С 27/20 - прототип.
Реферат
Изобретение относится к области авиации, в частности к конструкциям многовинтовых летающих платформ. Мультироторная летающая платформа с возможностью вертикального и горизонтального перемещения включает по крайней мере четыре роторные ячейки, закрепленные на платформе и содержащие каждая по два воздушных винта, установленных в ступицах с возможностью встречного вращения от привода силовой установки, и охватывающие винты обечайки. Обечайки с внутренней стороны выполнены в виде жестких расширяющихся кверху диффузоров с эластичными формообразующими оболочками снаружи. При этом диаметр верхней части обечайки составляет от 1.5 до 3 диаметра воздушного винта. Нижняя часть обечайки закреплена неподвижно на ступице и шарнирно относительно мачты с возможностью изменения угла наклона посредством не менее двух регулируемых по длине тяг, закрепленных одним концом на ступице, а другим на мачте. Длина мачты составляет не менее двух диаметров винта. Обеспечивается увеличение грузоподъемности мультироторной летающей платформы, улучшение ее управляемости, маневренности, безопасности использования. 4 з.п. ф-лы, 4 ил.
Комментарии