Способ активного управления плавательным средством - RU2581887C1
Код документа: RU2581887C1
Чертежи
Описание
Изобретение относится к области морской и речной техники и может быть использовано для активного управления плавательными средствами как надводными, так и подводными.
Известен способ активного управления плавательным средством, включающий передачу крутящего момента с приводного вала на гребной вал движителя с использованием редуктора и пространственное изменение положения гребного вала с установленным на нем гребным винтом относительно корпуса плавательного средства (см. Э.П. Лебедев и др. «Средства активного управления судами», Л., изд. «Судостроение». 1969 г., стр. 177-179). В данном способе активное управление плавательным средством осуществляют при помощи движительно-рулевых колонок (поворотных винтовых колонок). В этих колонках крутящий момент передается с приводного вала через угловой редуктор на гребной вал и далее на гребной винт. Положение гребного вала относительно приводного вала является неизменным. Поэтому активное управление плавательным средством становится возможным только при повороте самой колонки. В этом случае меняется положение гребного вала относительно корпуса плавательного средства, что позволяет ему изменять направление своего движения. При реализации данного способа активного управления плавательным средством гребной вал вместе с гребным винтом меняет свое положение в горизонтальной плоскости, что является существенным недостатком такого способа управления, так как он применим только для большинства надводных плавательных средств. Для подводных плавательных средств требуется управление и в вертикальной плоскости (управление по глубине). Применение известного способа для таких подводных плавательных средств становится возможным только в совокупности с использованием рулей, которые обеспечивают изменение положения плавательного средства по глубине, что является существенным усложнением активного управления таким средством.
Наиболее близким к заявляемому изобретению по технической сущности и достигаемому результату является способ активного управления плавательным средством, включающий передачу крутящего момента с приводного вала на выходной (гребной) вал и угловое изменение положения выходного вала относительно приводного вала в пространстве за счет нелинейной продольной конфигурации законцовок этих валов (см. SU 742647 А, кл. F16D 33/18, 1980).
Недостатком известного способа активного управления является невысокая маневренность активного управления плавательного средства и низкая надежность этого управления. Дело в том, что управление плавательным средством при помощи вышеуказанного способа не позволяет быстро изменить положение гребного вала относительно приводного. Особенно, такая оперативность требуется при движении необитаемых плавательных аппаратов, например торпед, когда требуется быстро изменить траекторию движения аппарата.
Целью данного изобретения является повышение маневренности и надежности активного управления плавательным средством.
Указанная цель достигается тем, что в известном способе активного управления плавательным средством, включающем передачу крутящего момента с приводного вала на гребной вал и угловое изменение положения гребного вала с установленным на нем гребным винтом относительно приводного вала в пространстве за счет нелинейной продольной конфигурации законцовок этих валов, в нем изменение положения гребного вала относительно приводного осуществляют путем воздействия на крепежный элемент, установленный на гребном валу, парными знакопеременными силовыми нагрузками.
Создание такой нагрузки позволяет очень быстро изменить положение гребного вала в пространстве относительно приводного вала и тем самым обеспечить высокую маневренность плавательного средства.
Реализация такой технологической операции возможна при помощи двух пар гидроцилиндров в каждой плоскости управления. Для поворота гребного вала шток одного гидроцилиндра втягивается, а шток другого - выдвигается из гидроцилиндра. Так создается пара знакопеременных (действующих в противоположных направлениях) сил, которые обеспечивают быстрое и надежное изменение положения гребного вала с гребным винтом, что повышает маневренность и надежность управления плавательным средством.
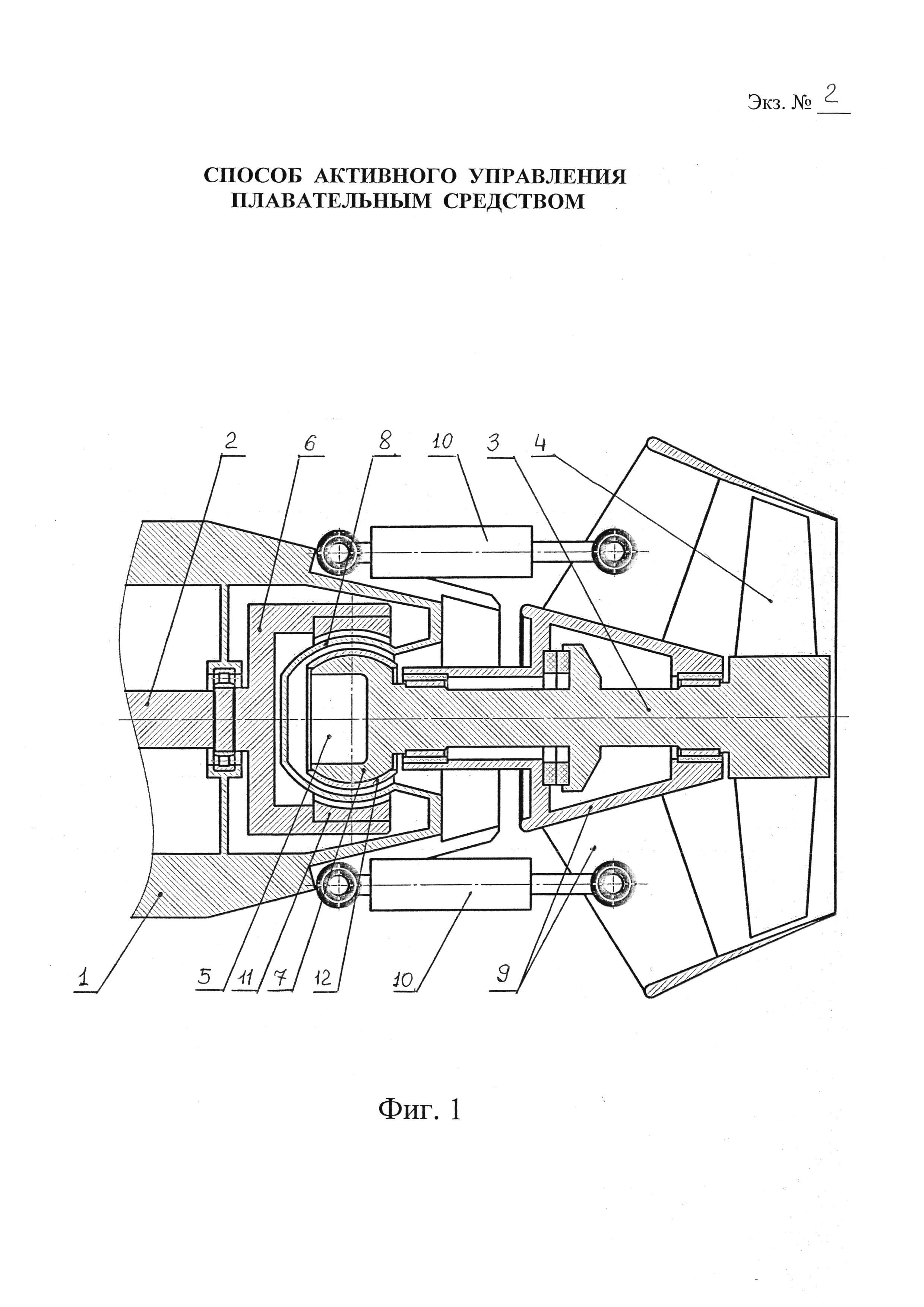
Использование предлагаемого способа активного управления плавательным средством с применением магнитной муфты иллюстрируется графическими материалами, приведенными на фигурах 1 и 2 со следующими обозначениями:
1 - корпус плавательного средства;
2 - приводной вал;
3 - гребной вал;
4 - гребной винт;
5 - единый узел поворота;
6 - законцовка приводного вала;
7 - законцовка гребного вала;
8 - герметизирующий элемент;
9 - крепежный элемент;
10 - гидроцилиндры;
11 - магнит приводного вала;
12 - магнит гребного вала.
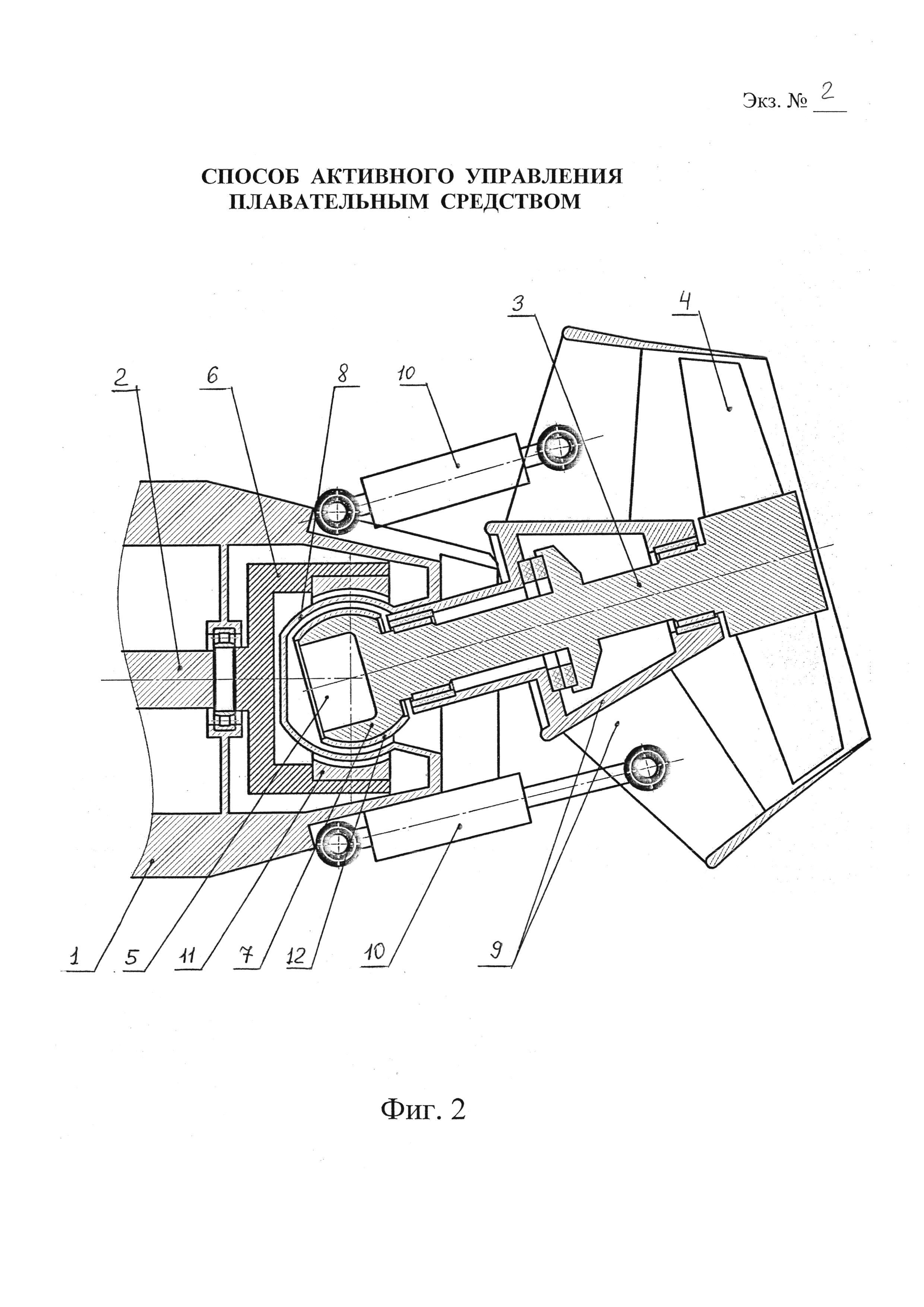
На фиг. 1 показана конструкция движителя плавательного средства, реализующая предлагаемый способ активного управления при нулевом отклонении гребного вала от нейтрального его положения, а на фиг. 2 - тот же движитель при совершении плавательным средством маневра.
Реализация способа активного управления плавательным средством осуществляется следующим образом (см. фиг. 1). Крутящий момент с приводного вала 2, расположенного внутри корпуса 1 плавательного средства, передается на его законцовку 6, на внутренней поверхности которой закреплен магнит 11. Создаваемое этим элементом магнитное поле взаимодействует с магнитным полем магнита 12, который установлен на законцовке гребного вала 7. Вращение законцовки 6 приводит к вращению законцовки 7. При этом обе законцовки не соприкасаются между собой, а между ними расположен герметизирующий элемент 8, который, с одной стороны, предотвращает попадание забортной воды в полость плавательного средства, где находится приводной вал 2, а с другой стороны, является проницаемым для магнитных полей. Магниты 11 и 12, герметизирующий элемент 8 и законцовка 7 за счет своих нелинейных продольных конфигураций создают единый узел поворота в виде сферического подшипника скольжения, который дает возможность законцовке 7, а значит и гребному валу 3, являющемуся продолжением этой законцовки, свободно менять свое положение в пространстве. Из блока управления (на фиг. не показан) поступает сигнал на гидроцилиндры 10. Шток одного из гидроцилиндров 10 (см. фиг. 2) втягивается, а другого - выдвигается, осуществляя парную знакопеременную нагрузку на крепежный элемент 9, который, будучи закрепленным с гребным валом 3, производит изменение пространственного положения этого вала. Соответственно изменяется положение и гребного винта 4, установленного на гребном валу 3, что приводит к изменению вектора тяги движителя и к изменению направления движения плавательного средства.
Отсутствие механического контакта гребного вала 3 с приводным валом 2 позволяет существенно снизить инерционность системы передачи крутящего момента и тем самым повысить маневренность управления плавательным средством. Особенно остро стоит задача повышения маневренности в подводных плавательных средствах, таких как торпедные аппараты, где для выполнения поставленной задачи изменение курса движения должно произойти за доли секунды как в вертикальной, так и в горизонтальной плоскостях.
Предлагаемый способ может найти широкое применение как в подводных плавательных средствах (подводные лодки, торпеды, автономные необитаемые подводные аппараты и др.), так и в надводных судах, например судах на подводных крыльях, когда требуется изменить заглубление гребного винта.
Реферат
Изобретение относится к области судостроения и может быть использовано при создании конструкций винтовых движителей надводных и подводных плавательных средств. Для активного управления плавательным средством включают передачу крутящего момента с приводного вала на гребной вал и угловое изменение положения гребного вала, на котором установлен гребной винт, относительно приводного вала в пространстве за счет нелинейной продольной конфигурации законцовок этих валов. Изменение положения гребного вала относительно приводного вала осуществляют путем воздействия на крепежный элемент, который установлен на гребном валу, парными знакопеременными силовыми нагрузками. Достигается повышение маневренности и надежность активного управления плавательным средством. 2 ил.
Формула
Документы, цитированные в отчёте о поиске
Устройство для установки средств приведения в движение судна в произвольное угловое положение
Комментарии