Устройство для установки средств приведения в движение судна в произвольное угловое положение - RU2060204C1
Код документа: RU2060204C1
Чертежи
























Описание
Изобретение относится к судостроению, в частности к движительным устройствам судов.
Известно устройство для установки средств приведения в движение судна в произвольное угловое положение, содержащее шарнирное сочленение вала средств приведения в движение судна с выходным валом приводного двигателя и механизм перемещения середств приведения в движение судна. Данное устройство выбрано в качестве наиболее близкого аналога изобретения.
Указанное устройство предназначено только для регулирования положения механизма привода в вертикальной плоскости. Для того, чтобы управлять судном, используют два поршневых гидроцилиндра. Устройство управления, таким образом, представляет собой отдельный узел, который работает независимо от балансирующего устройства.
Техническим результатом изобретения является возможность без прямого воздействия на средства приведения в движение судна и следовательно без помощи вспомогательных средств осуществлять отклонение судна в направлении правого или левого борта.
Технический результат достигается тем, что в устройстве для установки средств приведения в движение судна в произвольное угловое положение, содержащем шарнирное сочленение вала средств приведения в движение судна с выходным валом приводного двигателя и механизм перемещения средств приведения в движение судна, последний содержит первую муфту с участком, расположенным под углом к остальной части муфты, установленную с возможностью вращения относительно оси, коаксиальной с выходным валом приводного двигателя, и вторую муфту, установленную с возможностью вращения относительно упомянутого участка первой муфты, при этом вал средств приведения в движение судна проходит через вторую муфту от центра упомянутого шарнирного сочленения под углом к оси вращения этой муфты и выходит из нее, причем ось вращения второй муфты пересекает центр шарнирного сочленения.
Кроме того, механизм перемещения средств приведения в движение судна снабжен первой шестерней, входящей в зацепление с рядом зубьев, выполненных на поверхности первой муфты и идущих в ее поперечном направлении, причем шестерня соединена с вращающейся тягой или тросом, посредством которых осуществляется вращение этой муфты в любом направлении вокруг ее центральной оси.
Кроме того, ряд зубьев выполнен на внутренней поверхности первой муфты, а вращающаяся тяга или трос установлены параллельно оси вращения муфты.
Кроме того, механизм перемещения средств приведения в движение судна снабжен третьей муфтой, установленной концентрично первой муфте, и второй шестерней, входящей в зацепление с рядом зубьев, выполненных на поверхности третеьй муфты и идущих в ее поперечном направлении, причем упомянутая шестерня соединена с вращающейся тягой или тросом, посредством которых осуществляется вращение этой муфты, при этом на одном из свих крайних концов муфта содержит зубчатый обод, находящийся в частичном зацеплении с зубчатым ободом, с которым выполнена крайняя часть второй муфты, противоположная месту расположения средств приведения в движение судна.
Кроме того, шарнирное сочленение вала средств приведения в движение судна с выходным валом приводного двигателя выполнено в виде карданного вала, причем этот карданный вал установлен под углом к выходному валу приводного двигателя и к валу средств приведения в движение судна.
На фиг.1 изображен один из вариантов устройства, продольное сечение; на фиг.2 то же, в одном из положений его установки; на фиг.3 то же, в другом из положений его установки, показанного на фиг.1 устройства, но в двух различных положениях; на фиг.4 другой вариант выполнения устройства с частичным сечением; на фиг. 5 третий вариант выполнения устройства с частичным сечением; на фиг. 6-19 ряд векторных диаграмм, предназначенных для иллюстрации различных угловых положений устройства; на фиг.20 27 различные варианты выполнения механизмов приведения в движение судов, соответствующих известному состоянию техники, каждая из которых снабжена, соответственно, традиционным устройством и устройством согласно изобретению, связанными с блоком приведения в движение.
Устройство (фиг.1) содержит полую муфту 1, закрепленную на корпусе судна, первую муфту 2, которая может вращаться относительно оси, коаксиальной с выходным приводным валом 3, от привода судна. Муфта 2 содержит ряд зубьев 4, расположенных на ее внутренней поверхности в ее поперечном направлении и заходящих в зацепление с первой шестерней 5, связанной с вращающейся тягой 6 или вращающимся тросом. При помощи вращающейся тяги 6 муфта 2 может вращаться в том или другом направлении относительно своей центральной оси а. Муфта 2 содержит участок 7, расположенный под углом к оси вращения а муфты.
Устройство также содержит вторую муфту 8. Вал 10 для средств приведения в движение лодки, в качестве которых используется гребной винт, проходит через эту муфту 8, начиная от центра шарнирного сочленения 9. Вне муфты 8 приводной вал 10 идет в направлении, которое находится под углом относительно оси вращения b муфты 8. Зубчатый обод 11 предусмотрен на внутренней крайней части муфты 8.
Показанное на фиг.1 3 устройство также содержит третью муфту 12, которая может вращаться соосно с первой муфтой 2 и содержит зубчатый обод 13 в одной из своих крайних частей, который может находиться в частичном зацеплении с зубчатым ободом 11 второй муфты 8. Так же как и первая муфта 2, третья муфта 12 имеет внутри ряд зубьев 14, идущих в ее поперечном направлении. Шестерня 15, находящаяся в зацеплении с этим рядом зубьев, связана с вращающейся тягой 16 или вращающимся тросом. При вращении третьей муфты 12 в том или ином направлении при помощи вращающейся тяги 16 муфта 8 начинает вращаться в том же самом направлении. В этом случае вал 10 средств приведения в движение начинает двигаться таким образом, что описывает тело вращения К конической формы.
На фиг.2 и 3 показано горизонтальное продольное сечение устройства, т.е. план. На фиг. 2 показано положение устройства, при котором осуществляется максимальное отклонение лодки в направлении левого борта, в то время как на фиг.3 показано положение, при котором лодка движется прямо вперед. При вращении муфт 2 и 8 относительно друг друга становится возможным установить приводной вал 10 в любое произвольное угловое положение внутри параметра воображаемого конуса К.
На фиг.4 показано решение, в соответствии с которым устрйоство заключено в кожух 17. В таком решении третья муфта 12 устранена. Вместо этого как первая муфта 2, так и вторая муфта 8, снабжены зубчатыми венцами 18 и 19, простирающимися наружу в поперечном относительно муфт направлении. Зубчатый венец 18 муфты 2 входит в зацепление с червячной передачей 20, которая вращается в поперечном направлении относительно оси вращения муфты 2, и, соответственно, червячная передача 21 входит в зацепление с зубчатым венцом 19 муфты 8. Вращение приводных тяг или тросов передается соответствующим червячным пеердачам 20, 21, что приводит к относительному движению муфты 2 и 8 друг относительно друга, результатом чего является установка приводного вала 10 в определенное положение, аналогичное показанному на фиг.1. Соовтетствующее вращательное движение муфт 2 и 8 может быть также получено при перемещении червячных колес 20 и 21 по зубчатой рейке, которая перемещается в третьем продольном направлении при помощи тяг или тросов, которые могут совершать возвратно-поступательное движение внутри гибких оболочек.
На фиг.5 изображен третий вариант выполнения устройства, в соответствии с которым гребной винт 22 установлен на приводном валу 10. В этом варианте муфты 2 и 8 имеют различный внешний вал, но осуществляют в принципе идентичные функции, сопоставимые с ранее описанным решением, в связи с чем сохранены номера позиций на чертеже. Так же как и в решении, соответствующему фиг. 1 3, относительное вращение муфт 2 и 8 осуществляется при помощи вращающихся тяг 23 и 24. Каждая тяга через соответствующие шестерни 25 и 26 входит в зацепление с зубчатым венцом 27 или 28. Основным отличием рассматриваемого решения от двух предыдущих является введение между выходным валом 3 приводного двигателя и приводным валом 10 гребного винта карданного вала, располагающегося под углом как к выходному валу 3, так и к валу гребного винта 10. Это решение предназначено для использования прежде всего для больших моторных судов, когда нагрузка на приводной блок существенно выше, чем на малых судах. В этом случае нагрузка на единственное сочленение, такое как шарнирное сочленение 9, показанное на фиг.1 3, может стать недопустимо высокой.
Одной общей характеристической чертой показанных на фиг.1 5 решений является то, что все вращающиеся валы, например, приводной вал 3 и муфты 2, 8, имеющие оси вращения, соответственно а и b, пересекаются в одной точке на сочленении 9. Преимуществом такого решения является то, что (если приводное усилие не чрезмерно высоко) движение вращения к гребному винту передается через одно шарнирное сочленение 9. Это означает, что осевые силы, воздействующие на вал 10, не приводят к появлению скручивающих усилий в муфтах 2 и 8. Таким образом, создаются возможности для управления установкой устройства в различные угловые положения.
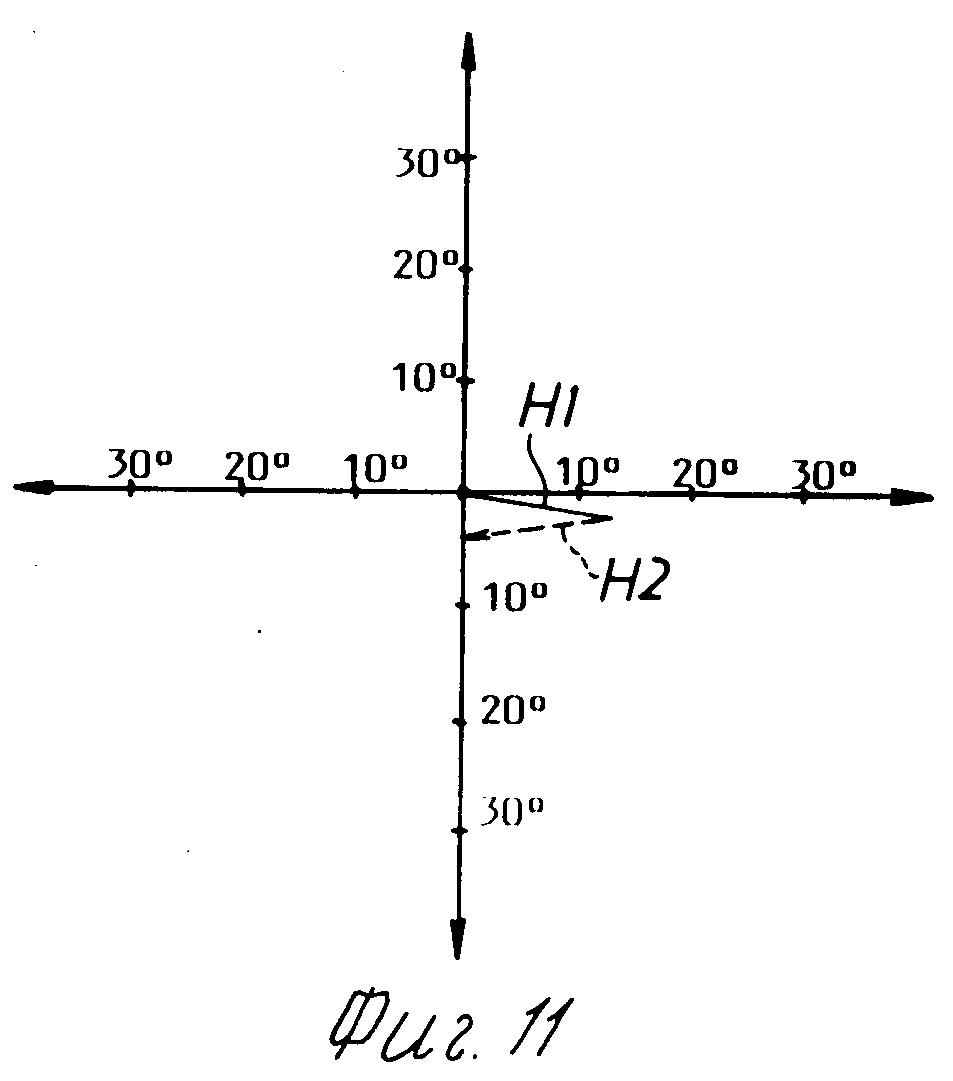
Для более ясного понимания изобретения, оно далее будет описано со ссылками на векторные диаграммы, показанные на фиг.6-19. Одновременно будут даваться ссылки на фиг.2, на которой угол α обозначает угол, образованный между осью вращения а первой муфты 2 и осью вращения b второй муфты 8, а угол β обозначает угол между осью вращения b второй муфты и валом 10 гребного винта. На векторных диаграммах длина вектора представляет соответствующий угол, напирмер угол α муфты 2, в то время как наклон вектора является прямым представлением "углового положения вращения" соответствующей муфты. Векторное диаграммы имеют систему координат, в соответствии с которой оси отградуированы в угловых величинах. Центр (origo) обозначает "прямой курс вперед", без наклона вверх или вниз корпуса лодки.
На фиг. 6 вектор Н1 занимает произвольное положение на диаграмме. Этот вектор имеет длину L и повернут на угол Φ относительно ватерпаса. Гребной винт, установленный на находящемся в таком направлении и таком угловом положении валу, будет вызывать смещение лодки в направлении правого борта в сочетании с некоторым подъемом кормы лодки (уравновешиванием). Как показано на фиг. 6, вектор Н1 может совершать полный оборот, т.е. угол Φ может иметь любое значение.
Как показано на фиг.2, в распоряжении имеется еще другой угол β Если действие муфты 8 во всех положениях имеет место под углом к муфте 2, то необходимо, что касается угла β начать для завершения диаграммы с вершины вектора Н1.
Это иллюстрируется фиг.7, на которой второй вектор Н2 дан той же самой длины, что и вектор Н1, например α β15о. Максимальный угол отклонения 30о изображен наклоном обоих векторов Н1 и Н2 в одном и том же направлении, Диаграмма также показывает, что в этом положении лодка смещена вправо приблизительно на 25о, в дополнение к чему корма лодки поднята достаточно высоко. Очевидно, такое положение установки является нереалистичным и показано только для того, чтобы иллюстрировать, как интерпретировать диаграмму.
Если желательно придать лодке отклонение руля, например 25о вправо, без одновременного подъема кормы, то следует принять угловое положение, показанное на фиг.8.
На фиг.9 показано положение угловой установки 5о влево, вновь без всякого подъема кормы. Фиг. 10 иллюстрирует, что вершина стрелки для Н2 может совпадать с осью высоты, равной 0.
Напротив, если желательно только поднять корму (например, без одновременного смещения), то это, возможно осуществить, как это иллюстрируется фиг. 11.
Очевидно, также необходимо иметь возможность управлять лодкой во время условий уравновешивания, как это показано на фиг.11. В этом случае векторная диаграмма может иметь вид, показанный на фиг.12, где изображено в качестве примера смещение в парвую сторону на 20о.
В этой связи следует упомянуть, что любое желательное положение управления и установка высоты могут быть достигнуты двумя путями. Положение в соответствии с фиг. 12 может, например, быть достигнуто также при различных относительных позициях установки муфт 2 и 8, как это иллюстрируется фиг.13.
Если желателен незначительный угол уравновешивания (подъем кормы), например, порядка одного градуса, то могут возникнуть проблемы. В случае одновременного управления при помощи небольших боковых движений, колеблющихся вокруг положения "прямо вперед", углы отклонения Φ и ψ будет значительными и "флуктуирующими" (см. фиг.14, 15 и 16).
Одним из решений такой проблемы является наклон всего устройства на "подходящий" фиксированный угол относительно нижней плоскости лодки. Кроме того, такое решение используется, когда вал двигателя выходит через днище лодки; в этом случае также создают угол наклона. На векторной диаграмме центр вращения Н1 должен быть в том случае смещен из точки пересечения координат в положение ниже этой точки на этот угол, например, 8о, как это показано на фиг.17. Векторы Н1 и Н2 предполагаются все еще имеющими одинаковую длину, например, 15о. Вектор Н2 располагается на фиг.17 в положении, соответствующем движению смещения на 20о вправо и без подъема кормы. При установленном таким образом устройстве колебательные движения муфт 2 и 8 и связанные с ними угловые ускорения будут ограничены.
Фиг. 18 иллюстриует другой пример установки положения с фиксированным углом 8о. Положение управления в этом случае соответствует случаю "прямо вперед" и выравнивающая высота приблизительно равна 3о.
Наконец, на фиг. 19 показан вариант положения установки фиг.18. В дополнение к выравниванию высоты показана ситуация легкого смещения в правую сторону. Этот вид управления обладает значительно большей "устойчивостью" в сравнении со случаями, иллюстрирующими фиг. 14, 15 и 16.
На остальных четежах показан ряд практических решений, иллюстрирующих значительное упрощение конструкции при применении изобретения. На фиг.20 показана конструкция, в которой имеется фиксированный вал гребного винта 30, руль 31 и один или несоклько уравновешивающих выступов 33, положение которых может быть установлено при помощи поршнево-цилиндровых блоков 32.
На фиг.21 показано для сравнения устройство 34, заменяющее все механизмы установки, показанные на фиг.20; на фиг.22 навесной мотор 35, который подвешивается на лодке при помощи сочленения 36.
На фиг.23 показано, каким образом подвесной мотор может быть установлен на лодке, если предполагать, что будет применяться управление устройством 34.
На фиг. 24 показано судно, приводимое в движение струей воды. Отдельный механизм 38 необходим для установки сопла 39 водяной струи.
На фиг. 25 показано, как может быть использовано соответствующее изобретению устройство для этой цели.
На фиг.26 показано судно, имеющее поверхностный гребной винт 40 и соответствующие механизмы установа 41 и 42.
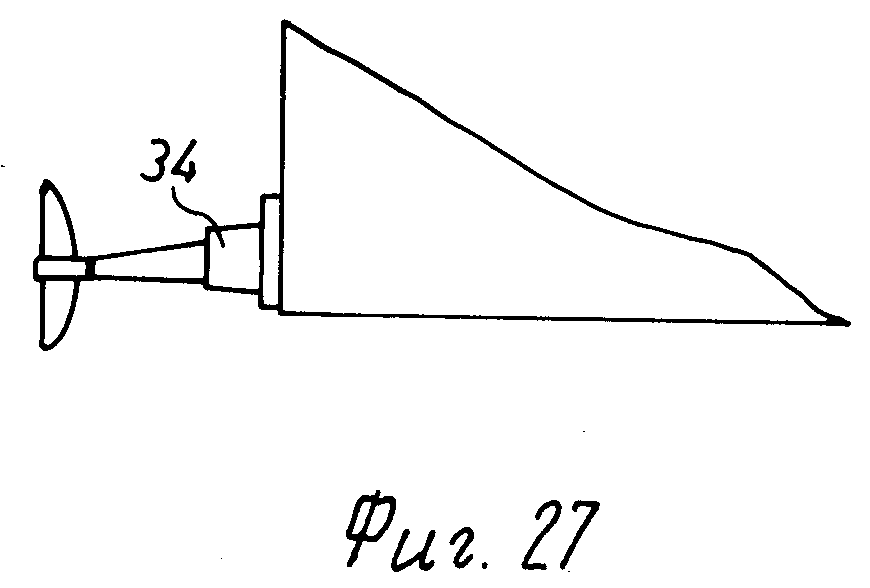
На фиг. 27 показано, как может быть использовано в таком случае устройство 34, соответствующее изобретению.
Изобретение не ограничено описанными примерами его осуществления, а может варьироваться в рамках его формулы изобретения. Это касается, например, различных механизмов, используемых для приведения в движение муфт 2 и 12. Например, муфта 2 может выступать из муфты 1 сзади в корпус лодки. Аналогично, муфта 12 может выступать в корупс лодки позади муфты 2. В таком случае к внутренней концевой части муфт 2 и 12 может быть подключен внешний механизм установки, например вращающийся рычаг, который закреплен на соответствующих муфтах 2 и 12, цепная передача, осуществляющая перемещение вокруг указанной части муфт 2 и 12, или шестерня, находящаяся в зацеплении с зубчатым венцом, выполненным на кожухе соответствующих муфт 2 и 12.
Реферат
Использование: судостроение, в частности устройство для установки средств приведения в движение судна в произвольное угловое положение. Сущность изобретения: устройство содержит первую муфту 2, которая может совершать вращение относительно оси а, которая пересекает вершину конуса К. Муфта 2 содержит угловую секцию 7. Муфта 8 может совершать вращение относительно этой секции 7. Вал 10 средств приведения в движение проходит через вторую муфту 8 от вершины конуса К и вне муфты 8 в направлении, располагающемся под углом к оси вращения b второй муфты 8, причем эта вторая ось b также пересекает вершину конуса. 4 з. п. ф-лы, 27 ил.

Комментарии