Система рулевого управления - RU2731400C1
Код документа: RU2731400C1
Чертежи
Описание
Область техники
[0001] Изобретение относится к системе рулевого управления, которая осуществляет управляет рулением транспортного средства.
Уровень техники
[0002] Оборудование рулевого управления для транспортного средства раскрывается в публикации не прошедшей экспертизу заявки на патент Японии № 2007-022194 (JP 2007-022194 А). Оборудование рулевого управления транспортного средства включает в себя главную систему и резервное средство. Главная система имеет главный поворотный электромотор, который формирует силу для поворота колес, и главный источник мощности, который подает электрическую мощность в главный поворотный электромотор. Резервное средство имеет вспомогательный поворотный электромотор или главный источник мощности, который работает в резервном режиме, когда главная система является неисправной.
Сущность изобретения
[0003] Привод используется для перемещения элемента, связанного с рулением транспортного средства. Привод прикладывает силу к элементу, когда он управляется посредством устройства управления.
[0004] Если неисправность возникает в устройстве управления, привод, управляемый посредством устройства управления, может формировать ошибочную силу. С точки зрения движения транспортного средства, нежелательно чтобы ошибочная сила прикладывалась к элементу, связанному с рулением. Кроме того, когда ошибочная сила прикладывается к элементу, связанному с рулением, водитель транспортного средства может испытывать странное или некомфортное ощущение в отношении руления.
[0005] Также может рассматриваться предоставление резервного устройства управления, в дополнение к главному устройству управления, в случае возникновения анормальности. В этом случае, когда подтверждается то, что анормальность возникает в основном устройстве управления, резервное устройство управления начинает управление вместо него. Тем не менее, требуется определенная продолжительность до тех пор, пока устройство управления не подтвердит возникновение анормальности. А именно, имеется определенный период времени между возникновением анормальности и фактическим переключением устройства управления. В течение этого периода, ошибочная сила продолжает прикладываться к элементу, связанному с рулением.
[0006] Изобретение предоставляет технологию для быстрого ограничения влияния ошибочного вывода привода на элемент, связанный с рулением транспортного средства.
[0007] Один аспект изобретения относится к системе рулевого управления, которая осуществляет руление транспортным средством. Система рулевого управления включает в себя привод, выполненный с возможностью прикладывать силу к элементу, связанному с рулением, и устройство управления, выполненное с возможностью управлять приводом. Привод имеет дуплексную конфигурацию, включающую в себя первый привод главной системы и второй привод вспомогательной системы. Устройство управления имеет дуплексную конфигурацию, включающую в себя первое устройство управления, которое принадлежит главной системе, и второе устройство управления, которое принадлежит вспомогательной системе. Первое устройство управления и второе устройство управления выполнены с возможностью вычислять идентичную управляемую переменную в качестве первой управляемой переменной и второй управляемой переменной, соответственно. Устройство управления имеет рабочие режимы, включающие в себя нормальный режим, в котором, по меньшей мере, один из первого привода и второго привода управляется согласно первой управляемой переменной, без использования второй управляемой переменной, и независимый режим, в котором первое устройство управления управляет первым приводом согласно первой управляемой переменной, и второе устройство управления управляет вторым приводом согласно второй управляемой переменной. В нормальном режиме, первое устройство управления и второе устройство управления выполнены с возможностью обмениваться данными между собой, и первое устройство управления выполнено с возможностью отправлять первую управляемую переменную во второе устройство управления, в то время как второе устройство управления выполнено с возможностью отправлять вторую управляемую переменную в первое устройство управления. Устройство управления выполнено с возможностью переключать рабочий режим из нормального режима в независимый режим, по меньшей мере, в одном из случая, в котором расхождение возникает между первой управляемой переменной и второй управляемой переменной и случая, в котором анормальность связи возникает в связи между первым устройством управления и вторым устройством управления.
[0008] В системе рулевого управления, как описано выше, каждое из первого устройства управления и второго устройства управления может иметь функцию самодиагностики для непосредственного обнаружения анормальности. Рабочие режимы устройства управления дополнительно могут включать в себя резервный режим, в котором когда возникновение анормальности в одном из первого устройства управления и второго устройства управления подтверждается через функцию самодиагностики, другое из первого устройства управления и второго устройства управления управляет приводом. Начальное время независимого режима может быть раньше начального времени резервного режима.
[0009] В системе рулевого управления, как описано выше, в нормальном режиме, первое устройство управления может управлять первым приводом согласно первой управляемой переменной, и второе устройство управления может управлять вторым приводом согласно первой управляемой переменной, принимаемой из первого устройства управления.
[0010] В системе рулевого управления, как описано выше, в нормальном режиме, первое устройство управления может определять то, возникает либо нет расхождение или анормальность связи, на основе второй управляемой переменной, принимаемой из второго устройства управления, и второе устройство управления может определять то, возникает либо нет расхождение или анормальность связи, на основе первой управляемой переменной, принимаемой из первого устройства управления.
[0011] В системе рулевого управления, как описано выше, первое устройство управления может определять то, что расхождение возникает, когда разность между первой управляемой переменной и второй управляемой переменной, принимаемой из второго устройства управления, равна или выше порогового значения. Второе устройство управления может определять то, что расхождение возникает, когда разность между второй управляемой переменной и первой управляемой переменной, принимаемой из первого устройства управления, равна или выше порогового значения.
[0012] В системе рулевого управления, как описано выше, одно из первого устройства управления и второго устройства управления может представлять собой устройство управления обнаружением, выполненное с возможностью обнаруживать расхождение или анормальность связи. Когда обнаружено расхождение или анормальность связи, устройство управления обнаружением может быть выполнено с возможностью начинать работу в независимом режиме и уведомлять другое из первого устройства управления и второго устройства управления относительно переключения из нормального режима в независимый режим. Другое из первого устройства управления и второго устройства управления может быть выполнено с возможностью начинать работу в независимом режиме, в ответ на уведомление из устройства управления обнаружением.
[0013] Транспортное средство может представлять собой транспортное средство с технологией "руления по проводам", включающее в себя руль и колеса, которые механически отсоединяются друг от друга. Система рулевого управления дополнительно может включать в себя поворотный привод, выполненный с возможностью поворачивать колеса, привод для формирования силы реакции, выполненный с возможностью прикладывать реактивный крутящий момент к рулю, устройство управления при повороте, выполненное с возможностью управлять поворотным приводом согласно операции руления с помощью руля, и устройство управления силой реакции, выполненное с возможностью управлять приводом для формирования силы реакции согласно операции руления с помощью руля. По меньшей мере, одно из устройства управления при повороте и устройства управления силой реакции может представлять собой устройство управления, имеющее дуплексную конфигурацию. Когда устройство управления при повороте представляет собой устройство управления, имеющее дуплексную конфигурацию, элемент может представлять собой колеса, и поворотный привод может представлять собой привод, имеющий дуплексную конфигурацию. Когда устройство управления силой реакции представляет собой устройство управления, имеющее дуплексную конфигурацию, элемент может представлять собой руль, и привод для формирования силы реакции может представлять собой привод, имеющий дуплексную конфигурацию.
[0014] В системе рулевого управления, как описано выше, каждое из устройства управления при повороте и устройства управления силой реакции может представлять собой устройство управления, имеющее дуплексную конфигурацию. Когда одно из устройства управления при повороте и устройства управления силой реакции переключает рабочий режим из нормального режима в независимый режим, другое из устройства управления при повороте и устройства управления силой реакции может быть выполнено с возможностью переключать рабочий режим из нормального режима в независимый режим.
[0015] Согласно вышеприведенному аспекту изобретения, привод, который прикладывает силу к элементу, связанному с рулением, имеет дуплексную конфигурацию, включающую в себя первый привод главной системы и второй привод вспомогательной системы. Устройство управления, которое управляет приводом, имеет дуплексную конфигурацию, включающую в себя первое устройство управления главной системы и второе устройство управления вспомогательной системы. Первое устройство управления и второе устройство управления вычисляют идентичную управляемую переменную в качестве первой управляемой переменной и второй управляемой переменной, соответственно.
[0016] В нормальном режиме, устройство управления управляет, по меньшей мере, одним из первого привода и второго привода, согласно первой управляемой переменной, вычисленной посредством первого устройства управления. При этом управлении, шум и вибрация должны формироваться с меньшей вероятностью или с очень небольшой вероятностью в приводе.
[0017] Тем не менее, когда анормальность возникает в первом устройстве управления, первая управляемая переменная, вычисленная посредством первого устройства управления, может становиться ошибочным значением. Когда первая управляемая переменная становится ошибочным значением, привод формирует ошибочную силу. С учетом этой ситуации, предоставляется независимый режим, в дополнение к нормальному режиму.
[0018] В независимом режиме, первое устройство управления управляет первым приводом согласно первой управляемой переменной, и второе устройство управления управляет вторым приводом согласно второй управляемой переменной. Даже когда первая управляемая переменная становится ошибочным значением, второй привод, управляемый согласно корректной второй управляемой переменной, формирует корректную силу. Даже когда первый привод пытается перемещать элемент с ошибочной силой, второй привод перемещает элемент с корректной силой одновременно. А именно, нормальный второй привод функционирует с возможностью компенсировать ошибочный вывод первого привода. Как результат, влияние ошибочного вывода привода на элемент ограничивается (ослабляется).
[0019] Кроме того, переключение из нормального режима в независимый режим выполняется в ответ на обнаружение "знака анормальности". Более конкретно, в течение нормального режима, первое устройство управления и второе устройство управления отправляют и принимают, соответственно, вычисленные управляемые переменные (первую управляемую переменную, вторую управляемую переменную) между собой, через связь. Когда расхождение возникает между первой управляемой переменной и второй управляемой переменной, или, когда анормальность возникает в связи между первым устройством управления и вторым устройством управления, устройство управления обнаруживает его/ее в качестве знака анормальности. Знак анормальности может обнаруживаться раньше подтверждения возникновения анормальности. Соответственно, независимый режим может начинаться быстро.
[0020] Как описано выше, согласно изобретению, когда анормальность возникает в первом устройстве управления главной системы, влияние ошибочного вывода привода на элемент, связанный с рулением транспортным средством, может быстро ограничиваться (ослабляться). Как результат, руление или движение транспортного средства стабилизируется. Кроме того, водитель с меньшей вероятностью или с очень небольшой вероятностью должен испытывать странное или некомфортное ощущение в отношении движения транспортного средства и руления.
Краткое описание чертежей
[0021] Ниже описываются признаки, преимущества и техническая и промышленная значимость примерных вариантов осуществления изобретения со ссылкой на прилагаемые чертежи, на которых аналогичные номера обозначают аналогичные элементы, и на которых:
Фиг. 1 является блок-схемой, схематично показывающей конфигурацию системы рулевого управления согласно первому варианту осуществления изобретения;
Фиг. 2 является блок-схемой, схематично показывающей дуплексную конфигурацию системы рулевого управления согласно первому варианту осуществления изобретения;
Фиг. 3 является схематичным видом, показывающим первый пример дуплексной конфигурации привода согласно первому варианту осуществления изобретения;
Фиг. 4 является схематичным видом, показывающим второй пример дуплексной конфигурации привода согласно первому варианту осуществления изобретения;
Фиг. 5 является схематичным видом, показывающим третий пример дуплексной конфигурации привода согласно первому варианту осуществления изобретения;
Фиг. 6 является схематичным видом, показывающим четвертый пример дуплексной конфигурации привода согласно первому варианту осуществления изобретения;
Фиг. 7 является блок-схемой, полезной для описания одного примера вычисления управляемых переменных посредством устройства управления согласно первому варианту осуществления изобретения;
Фиг. 8 является блок-схемой, полезной для описания другого примера вычисления управляемых переменных посредством устройства управления согласно первому варианту осуществления изобретения;
Фиг. 9 является блок-схемой, полезной для описания нормального режима устройства управления согласно первому варианту осуществления изобретения;
Фиг. 10 является блок-схемой, полезной для описания независимого режима устройства управления согласно первому варианту осуществления изобретения;
Фиг. 11 является блок-схемой, полезной для описания резервного режима устройства управления согласно первому варианту осуществления изобретения;
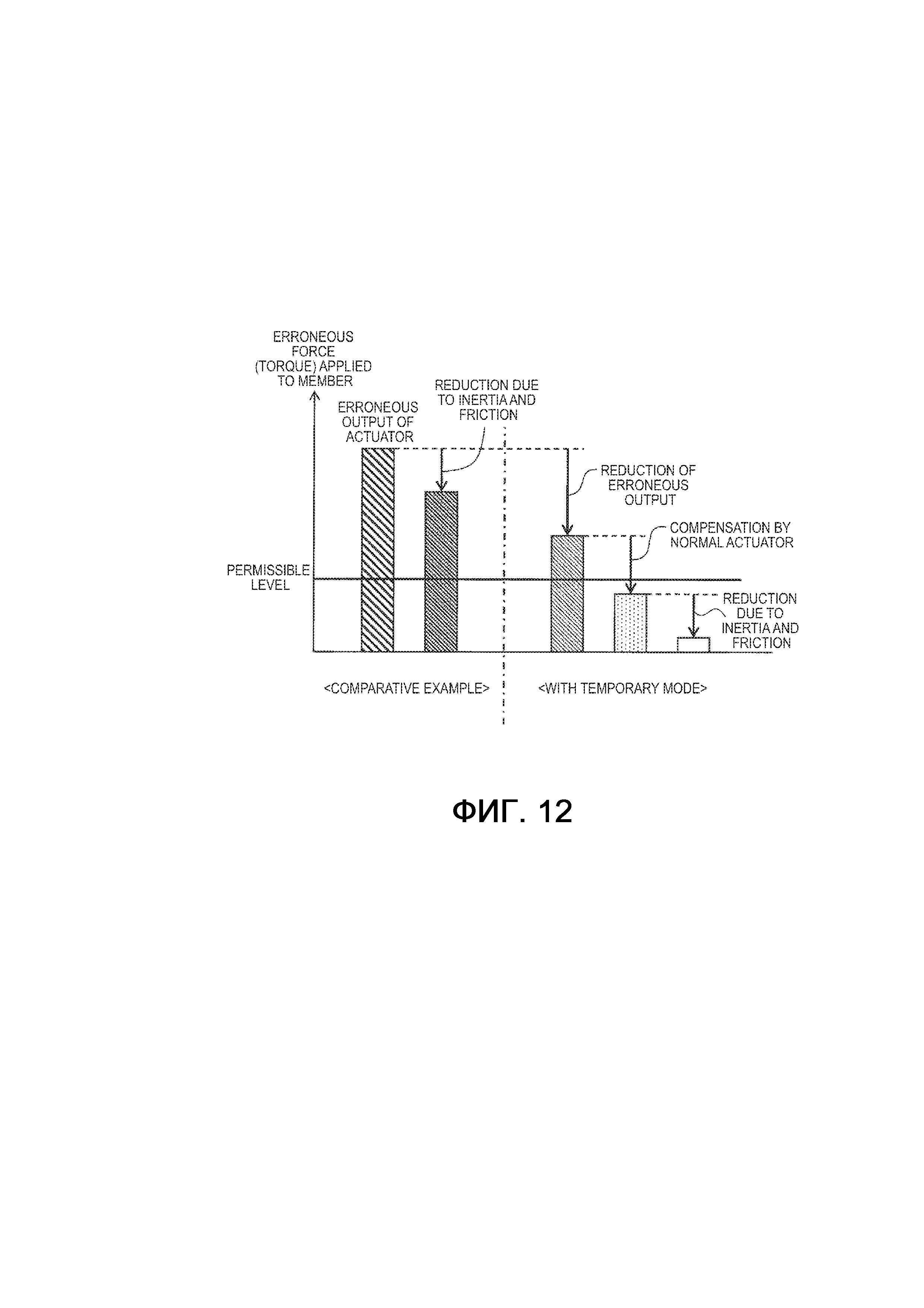
Фиг. 12 является схематичным видом, полезным для описания преимущества независимого режима согласно первому варианту осуществления изобретения;
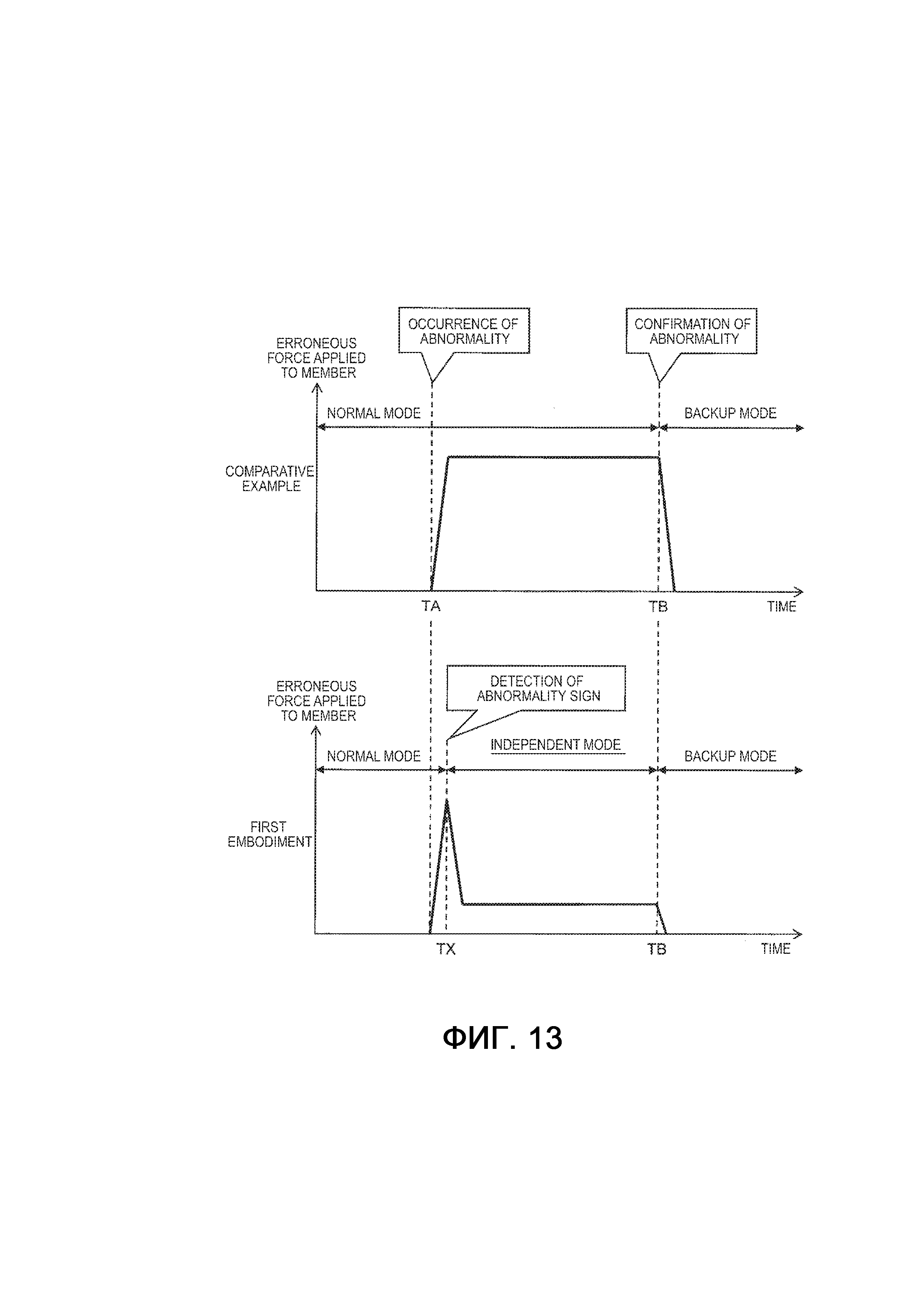
Фиг. 13 является временной диаграммой, полезной для описания преимущества независимого режима согласно первому варианту осуществления изобретения;
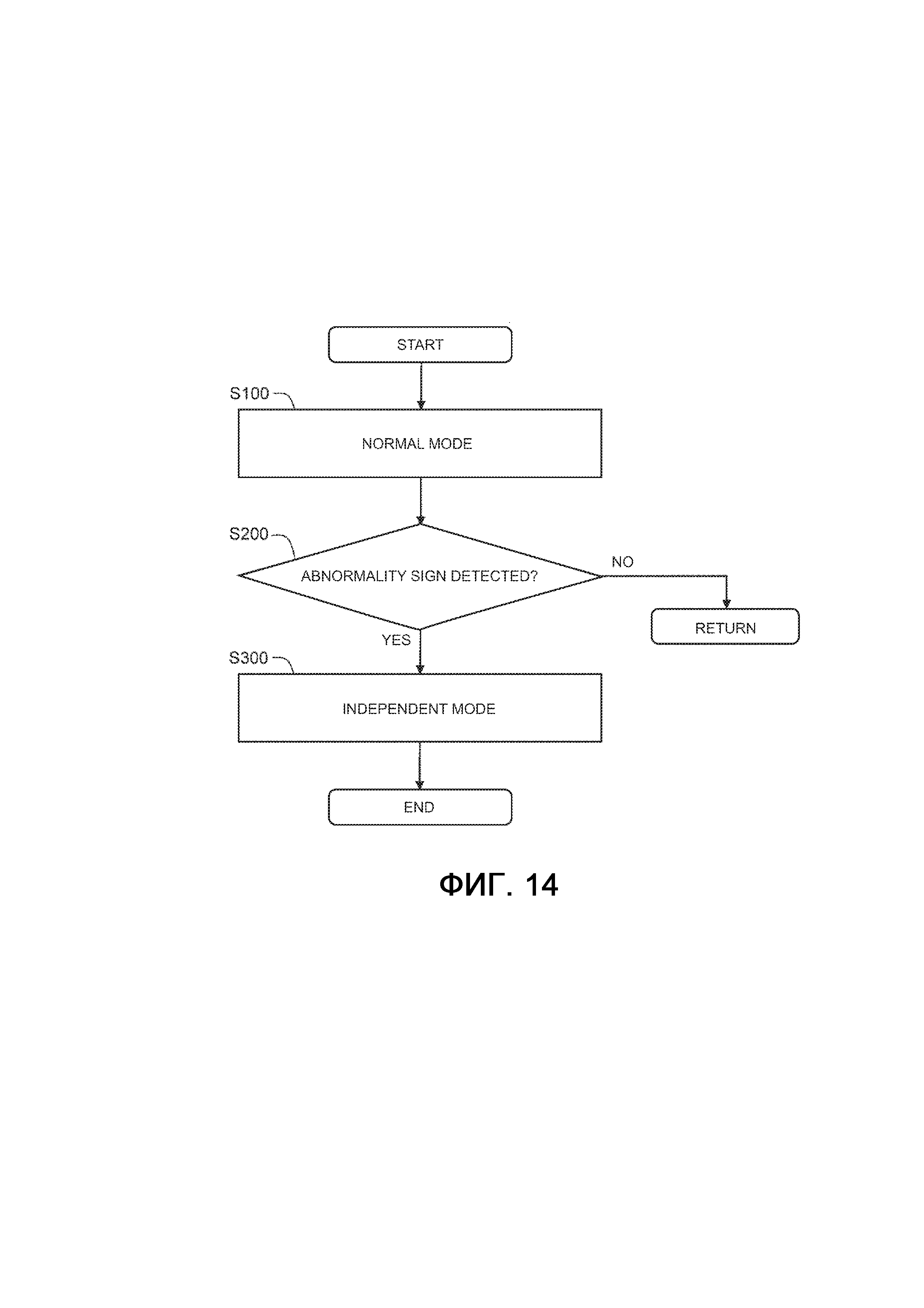
Фиг. 14 является блок-схемой последовательности операций способа, в общем, описывающей обработку посредством устройства управления согласно первому варианту осуществления изобретения;
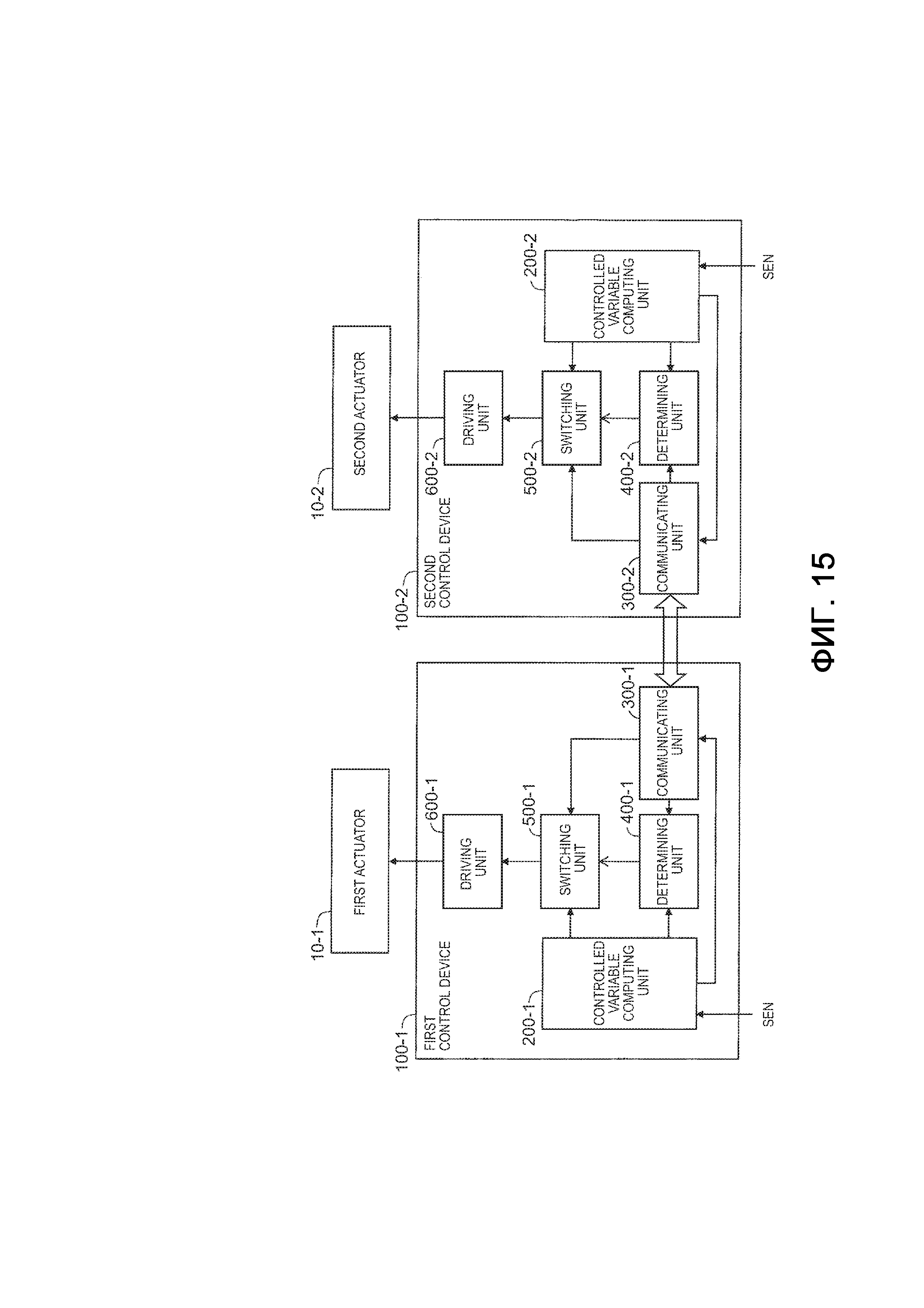
Фиг. 15 является блок-схемой, показывающей пример функциональной конфигурации устройства управления согласно второму варианту осуществления изобретения;
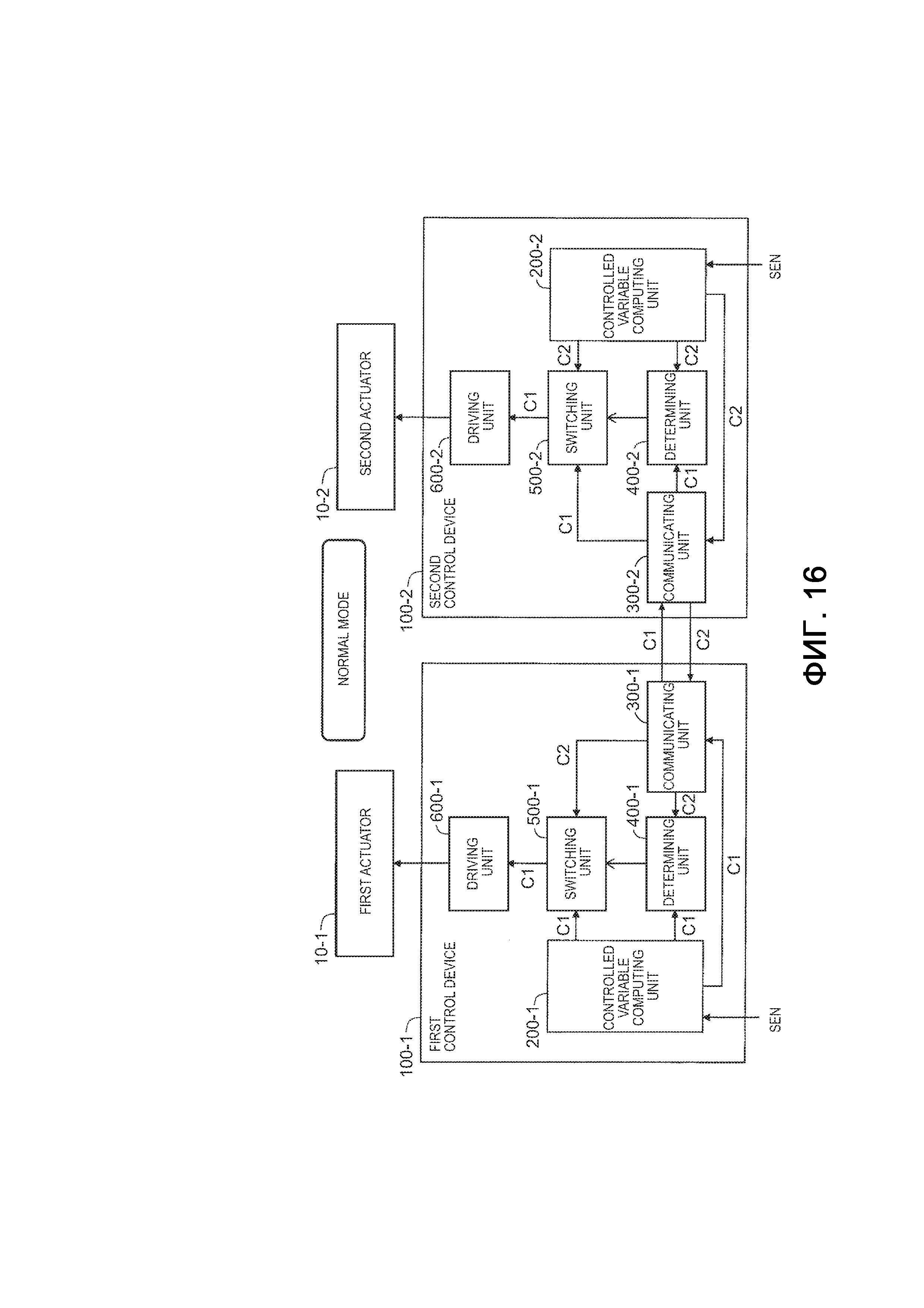
Фиг. 16 является функциональной блок-схемой, полезной для описания нормального режима устройства управления согласно второму варианту осуществления изобретения;
Фиг. 17 является функциональной блок-схемой, полезной для описания независимого режима устройства управления согласно второму варианту осуществления изобретения;
Фиг. 18 является функциональной блок-схемой, полезной для описания резервного режима устройства управления согласно второму варианту осуществления изобретения;
Фиг. 19 является блок-схемой, полезной для описания нормального режима устройства управления согласно третьему варианту осуществления изобретения;
Фиг. 20 является блок-схемой, полезной для описания нормального режима устройства управления согласно третьему варианту осуществления изобретения;
Фиг. 21 является блок-схемой, схематично показывающей конфигурацию системы рулевого управления согласно четвертому варианту осуществления изобретения;
Фиг. 22 является блок-схемой, показывающей пример дуплексной конфигурации системы рулевого управления согласно четвертому варианту осуществления изобретения; и
Фиг. 23 является блок-схемой, схематично показывающей конфигурацию системы рулевого управления согласно пятому варианту осуществления изобретения.
Подробное описание вариантов осуществления
[0022] Далее описываются некоторые варианты осуществления изобретения со ссылкой на чертежи.
1. Первый вариант осуществления
1-1. Система рулевого управления
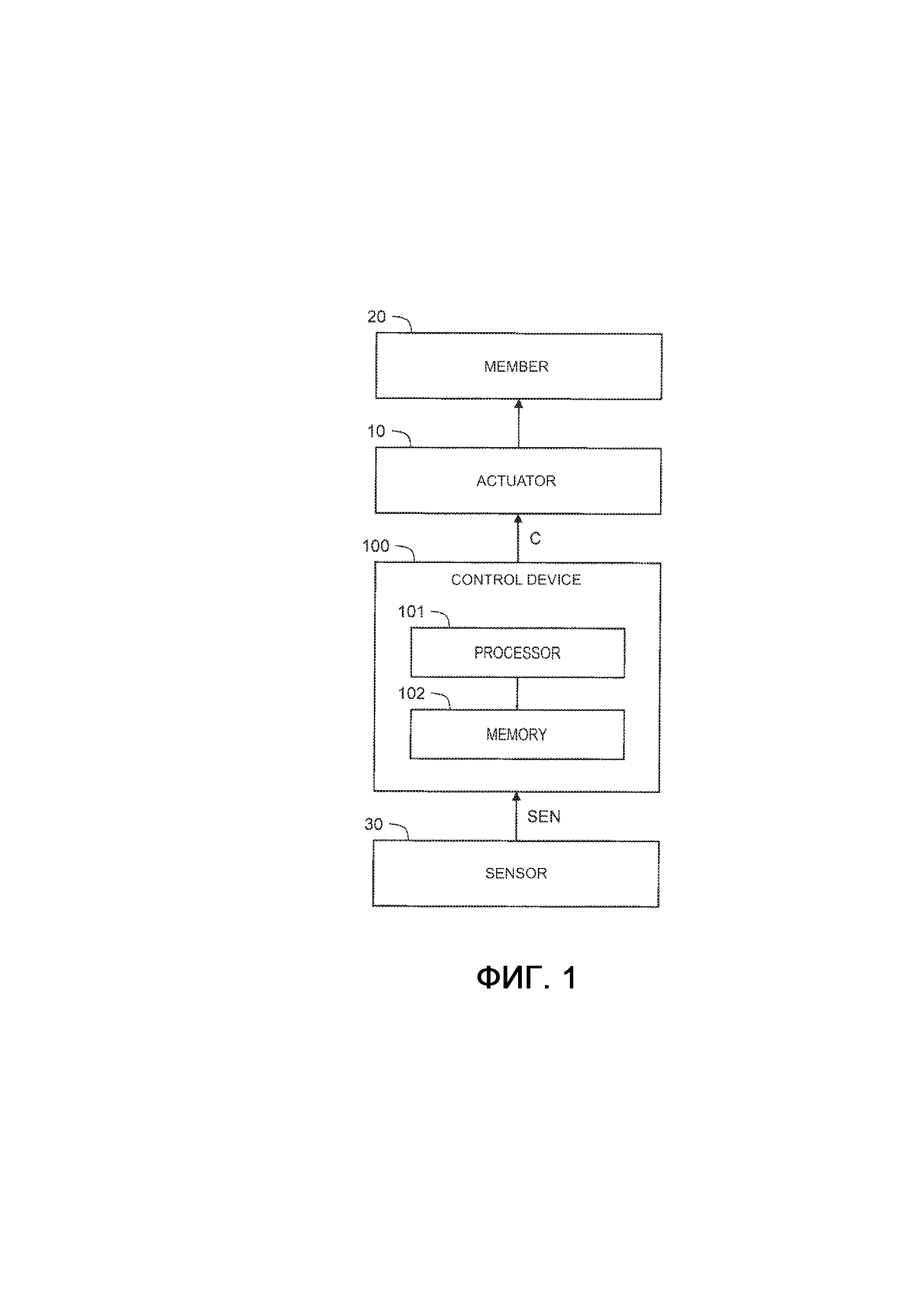
[0023] Фиг. 1 является блок-схемой, схематично показывающей конфигурацию системы 1 рулевого управления согласно первому варианту осуществления. Система 1 рулевого управления устанавливается на транспортном средстве и осуществляет руление транспортным средством. Система 1 рулевого управления включает в себя привод 10 и устройство 100 управления.
[0024] Привод 10 сцепляется с элементом 20, связанным с рулением транспортным средством, и имеет возможность прикладывать силу к элементу 20. Электромотор представляет собой один пример привода 10. Примеры элемента 20 включают в себя колеса и руль.
[0025] Устройство 100 управления управляет приводом 10. Устройство 100 управления включает в себя микрокомпьютер, имеющий процессор 101 и запоминающее устройство 102. Устройство 100 управления также может включать в себя схему приведения в действие (например, инвертор), которая приводит в действие привод 10. Процессор 101 выполняет управляющие программы, сохраненные в запоминающем устройстве 102, так что устройство 100 управления реализует различные виды обработки.
[0026] Датчик 30, который представляет множество датчиков, обнаруживает информацию, необходимую для управления приводом 10 посредством устройства 100 управления. Например, датчик 30 обнаруживает операцию руления (например, угол поворота при рулении, крутящий момент поворота при рулении), выполняемую водителем транспортного средства, рабочие условия привода 10 (например, угол вращения, частоту вращения и ток приведения в действие электромотора), условия движения (например, скорость транспортного средства) транспортного средства и т.д. Датчик 30 отправляет информацию SEN по обнаружению, указывающую результаты обнаружения, в устройство 100 управления.
[0027] Устройство 100 управления вычисляет управляемую переменную C, используемую для управления приводом 10, на основе информации SEN по обнаружению. Примеры управляемой переменной C включают в себя целевой угол поворота колес, целевой угол вращения привода 10, целевую частоту вращения привода 10, целевой крутящий момент привода 10, целевой ток, который приводит в действие привод 10, сигнал управления по току и т.д. Устройство 100 управления управляет приводом 10 согласно управляемой переменной C. Например, когда привод 10 представляет собой электромотор, и управляемая переменная C представляет собой целевой угол вращения, устройство 100 управления управляет электромотором способом с обратной связью, так что угол вращения электромотора становится равным целевому углу вращения.
1-2. Дуплексная конфигурация системы рулевого управления
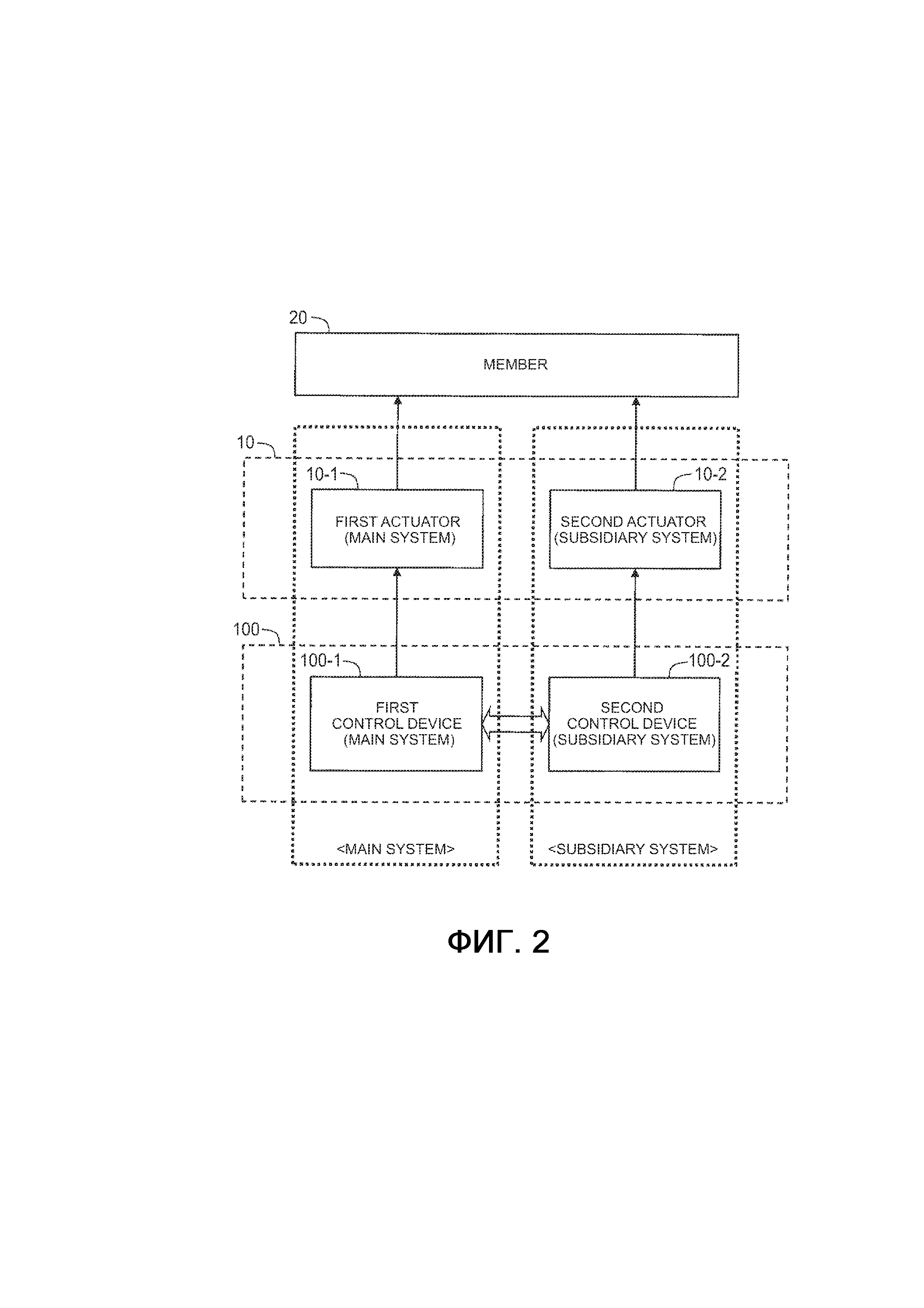
[0028] Фиг. 2 является блок-схемой, схематично показывающей дуплексную конфигурацию (резервную конфигурацию) системы 1 рулевого управления согласно этому варианту осуществления. В этом варианте осуществления, по меньшей мере, привод 10 и устройство 100 управления имеют дуплексную конфигурацию. Один набор дуплексной конфигурации называется "главной системой", а другой называется "вспомогательной системой" для удобства. Главная система и вспомогательная система имеют идентичную конфигурацию.
1-2-1. Дуплексная конфигурация привода
[0029] Как показано на фиг. 2, привод 10 имеет дуплексную конфигурацию, включающую в себя первый привод 10-1 главной системы и второй привод 10-2 вспомогательной системы. Первый привод 10-1 и второй привод 10-2 сцепляются с идентичным элементом 20 и имеют возможность прикладывать силу к идентичному элементу 20 одновременно.
[0030] В дальнейшем описываются различные примеры дуплексной конфигурации привода 10. В примерах, которые описываются ниже, привод 10 представляет собой электромотор.
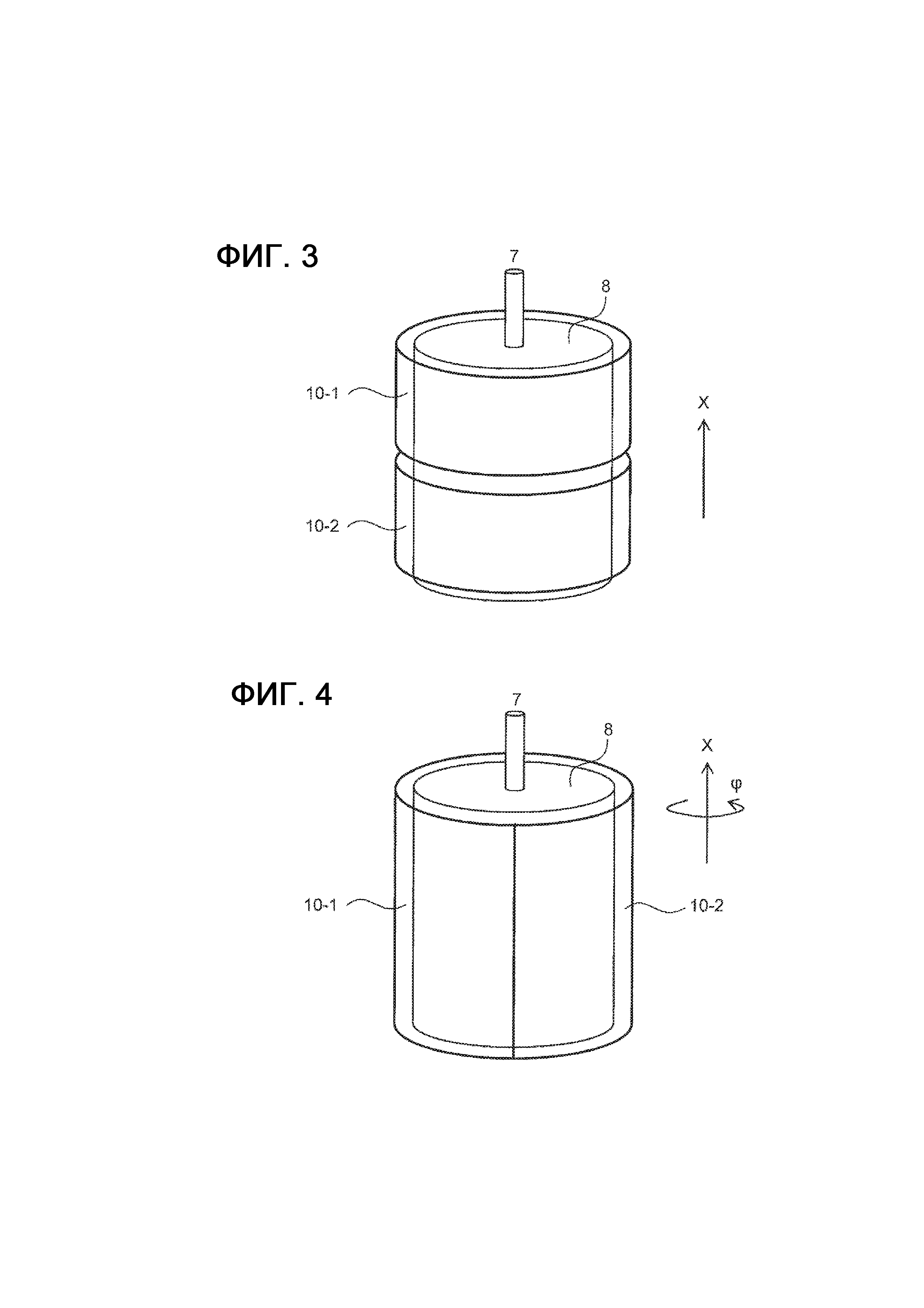
[0031] Фиг. 3 является схематичным видом, показывающим первый пример дуплексной конфигурации привода 10. Ротор 8 электромотора соединяется с выходным валом 7 и вращается вокруг выходного вала 7. На фиг. 3, "X" обозначает направление, параллельное выходному валу 7. В первом примере, ротор 8 является общим для первого привода 10-1 и второго привода 10-2. Тем не менее, обмотка (катушка) первого привода 10-1 и обмотка второго привода 10-2 выполнены с возможностью быть отделенными в направлении по оси X. Таким образом, устанавливается дуплексная конфигурация.
[0032] Фиг. 4 является схематичным видом, показывающим второй пример дуплексной конфигурации привода 10. На фиг. 4, "ɸ" обозначает направление вращения ротора 8 электромотора. Во втором примере, ротор 8 является общим для первого привода 10-1 и второго привода 10-2. Тем не менее, обмотка первого привода 10-1 и обмотка второго привода 10-2 выполнены с возможностью быть отделенными в направлении ɸ. Таким образом, устанавливается дуплексная конфигурация.
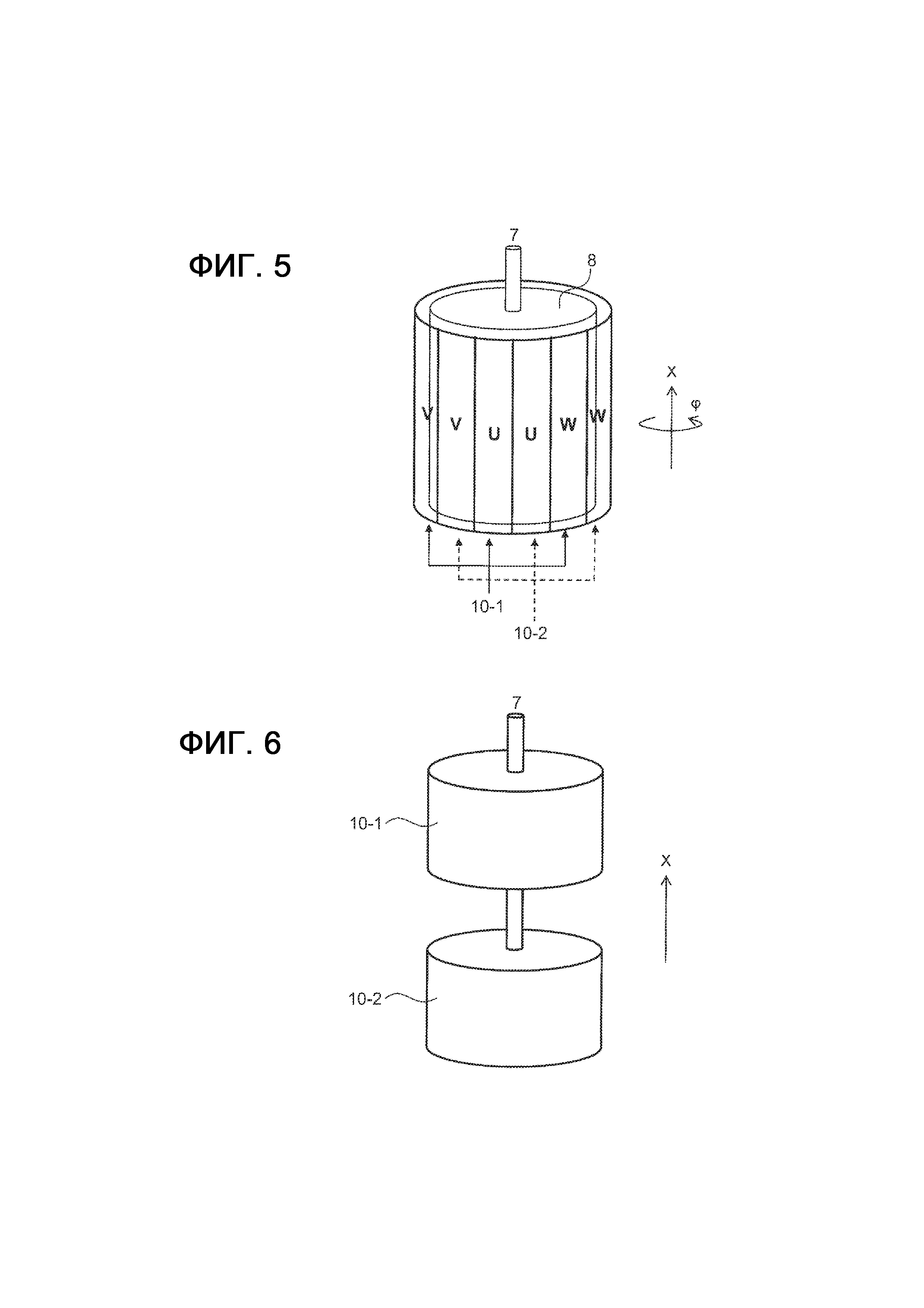
[0033] Фиг. 5 является схематичным видом, показывающим третий пример дуплексной конфигурации привода 10. Как и в случае второго примера, обмотка первого привода 10-1 и обмотка второго привода 10-2 выполнены с возможностью быть отделенными в направлении ɸ. В частности, обмотки U-фазы, V-фазы и W-фазы первого привода 10-1 и обмотки U-фазы, V-фазы и W-фазы второго привода 10-2 размещаются попеременно. Таким образом, устанавливается дуплексная конфигурация.
[0034] Фиг. 6 является схематичным видом, показывающим четвертый пример дуплексной конфигурации привода 10. В четвертом примере, электромотор первого привода 10-1 и электромотор второго привода 10-2 предоставляются отдельно, и два различных электромотора соединяются с идентичным валом (выходным валом 7). Таким образом, устанавливается дуплексная конфигурация.
1-2-2. Дуплексная конфигурация устройства управления
[0035] Как показано на фиг. 2, устройство 100 управления имеет дуплексную конфигурацию, включающую в себя первое устройство 100-1 управления главной системы и второе устройство 100-2 управления вспомогательной системы. Каждое из первого устройства 100-1 управления и второго устройства 100-2 управления имеет конфигурацию, идентичную конфигурации устройства 100 управления, показанного на фиг. 1. Первое устройство 100-1 управления главной системы управляет первым приводом 10-1 главной системы. Второе устройство 100-2 управления вспомогательной системы управляет вторым приводом 10-2 вспомогательной системы.
[0036] Кроме того, первое устройство 100-1 управления и второе устройство 100-2 управления соединяются между собой таким образом, что они могут обмениваться данными между собой. Связь может представлять собой проводную связь или беспроводную связь.
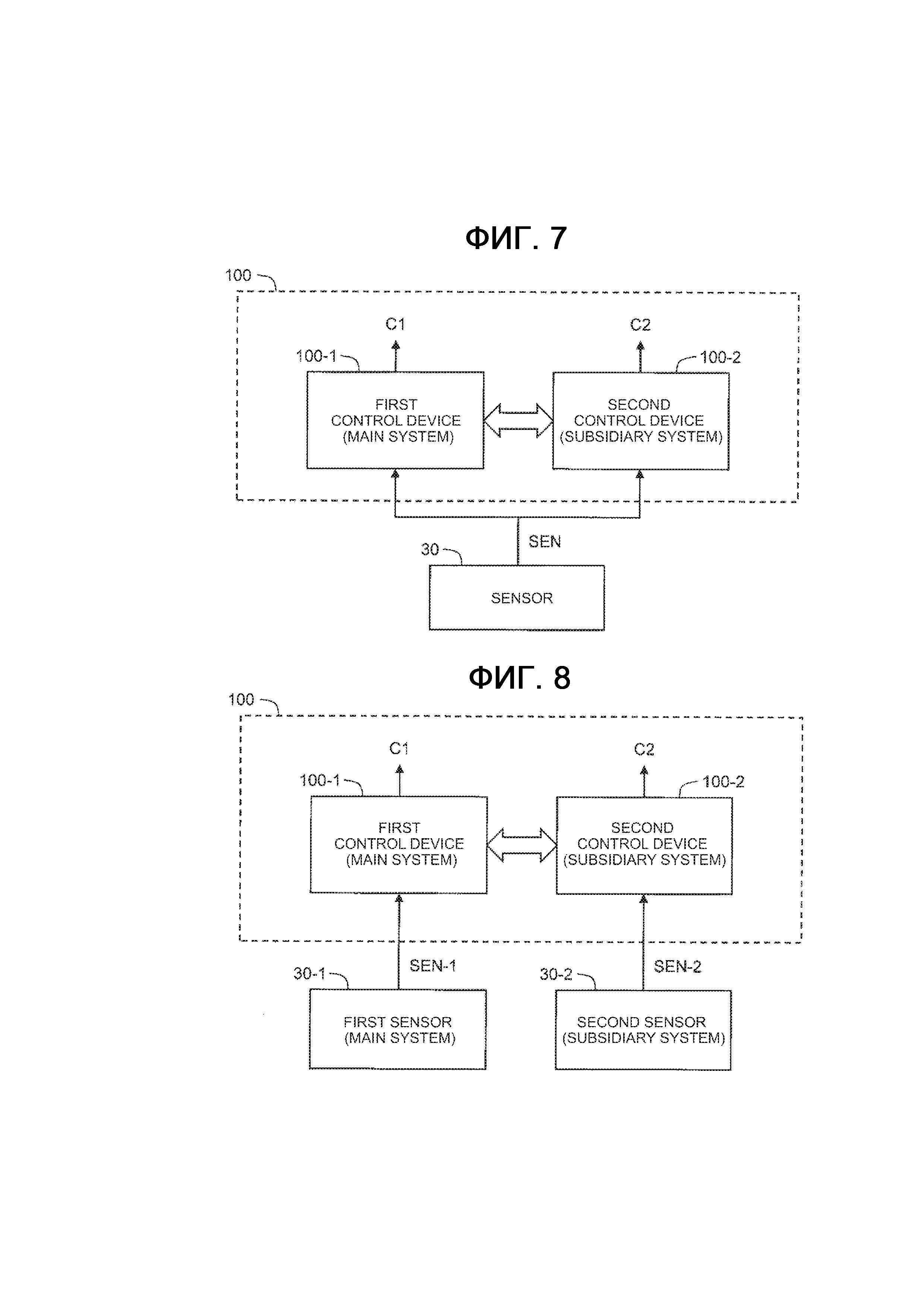
[0037] Фиг. 7 является блок-схемой, полезной для описания одного примера вычисления управляемой переменной C посредством устройства 100 управления. Датчик 30 отправляет информацию SEN по обнаружению в первое устройство 100-1 управления и второе устройство 100-2 управления. Первое устройство 100-1 управления и второе устройство 100-2 управления вычисляют идентичную управляемую переменную C, на основе идентичной информации SEN по обнаружению.
[0038] В нижеприведенном описании, управляемая переменная C, вычисленная посредством первого устройства 100-1 управления, называется "первой управляемой переменной C1", и управляемая переменная C, вычисленная посредством второго устройства 100-2 управления, называется "второй управляемой переменной C2" для удобства.
[0039] Фиг. 8 является блок-схемой, полезной для описания другого примера вычисления управляемой переменной C посредством устройства 100 управления. В примере, показанном на фиг. 8, датчик 30 также имеет дуплексную конфигурацию. Более конкретно, датчик 30 включает в себя первый датчик 30-1 главной системы и второй датчик 30-2 вспомогательной системы. Первый датчик 30-1 и второй датчик 30-2 могут монтироваться на первом приводе 10-1 и втором приводе 10-2, соответственно. Первый датчик 30-1 и второй датчик 30-2 получают идентичную информацию по обнаружению. Информация SEN по обнаружению, полученная посредством первого датчика 30-1, называется "первой информацией SEN-1 по обнаружению", и информация SEN по обнаружению, полученная посредством второго датчика 30-2, называется "второй информацией SEN-2 по обнаружению" для удобства.
[0040] Первый датчик 30-1 главной системы отправляет первую информацию SEN-1 по обнаружению в первое устройство 100-1 управления главной системы. Первое устройство 100-1 управления вычисляет первую управляемую переменную C1, на основе первой информации SEN-1 по обнаружению. Второй датчик 30-2 вспомогательной системы отправляет вторую информацию SEN-2 по обнаружению во второе устройство 100-2 управления вспомогательной системы. Второе устройство 100-2 управления вычисляет вторую управляемую переменную C2, на основе второй информации SEN-2 по обнаружению.
[0041] Например, каждая из первой управляемой переменной C1 и второй управляемой переменной C2 составляет целевое значение управления с обратной связью привода 10.
[0042] В качестве одного примера, в дальнейшем рассматривается целевой угол вращения привода 10 (электромотора). Целевой угол вращения первого привода 10-1 равен целевому углу вращения второго привода 10-2. Соответственно, каждая из первой управляемой переменной C1 и второй управляемой переменной C2 составляет идентичный целевой угол вращения или величину (например, сигнал управления электромотором), соответствующую целевому углу вращения.
[0043] В качестве другого примера, в дальнейшем рассматривается целевой крутящий момент привода 10 в целом. Целевой крутящий момент первого привода 10-1 составляет половину целевого крутящего момента привода 10 в целом. Аналогично, целевой крутящий момент второго привода 10-2 составляет половину целевого крутящего момента привода 10 в целом. Соответственно, каждая из первой управляемой переменной C1 и второй управляемой переменной C2 составляет половину целевого крутящего момента привода 10 в целом или величины (например, целевого тока), соответствующей половине целевого крутящего момента.
[0044] В идеале, первая управляемая переменная C1 и вторая управляемая переменная C2 имеют идентичную абсолютную величину или значение. В реальности, незначительная разность может возникать между первой управляемой переменной C1 и второй управляемой переменной C2. Например, в случае примера, показанного на фиг. 8, незначительная разность между первой информацией SEN-1 по обнаружению и второй информацией SEN-2 по обнаружению может вызывать незначительную разность между первой управляемой переменной C1 и второй управляемой переменной C2. Причины незначительной разности между первой информацией SEN-1 по обнаружению и второй информацией SEN-2 по обнаружению включают в себя шум датчиков при обнаружении, варьирования при изготовлении между первым датчиком 30-1 и вторым датчиком 30-2 и т.д. В случае примера, показанного на фиг. 7, также шум в ходе связи информации SEN по обнаружению, варьирования при изготовлении между первым устройством 100-1 управления и вторым устройством 100-2 управления и т.д., могут вызывать незначительную разность.
1-3. Рабочий режим устройства управления
[0045] Далее описывается работа устройства 100 управления согласно этому варианту осуществления. Согласно этому варианту осуществления, имеется два или более рабочих режима устройства 100 управления. Более конкретно, рабочие режимы устройства 100 управления включают в себя, по меньшей мере, "нормальный режим" и "независимый режим".
1-3-1. Нормальный режим
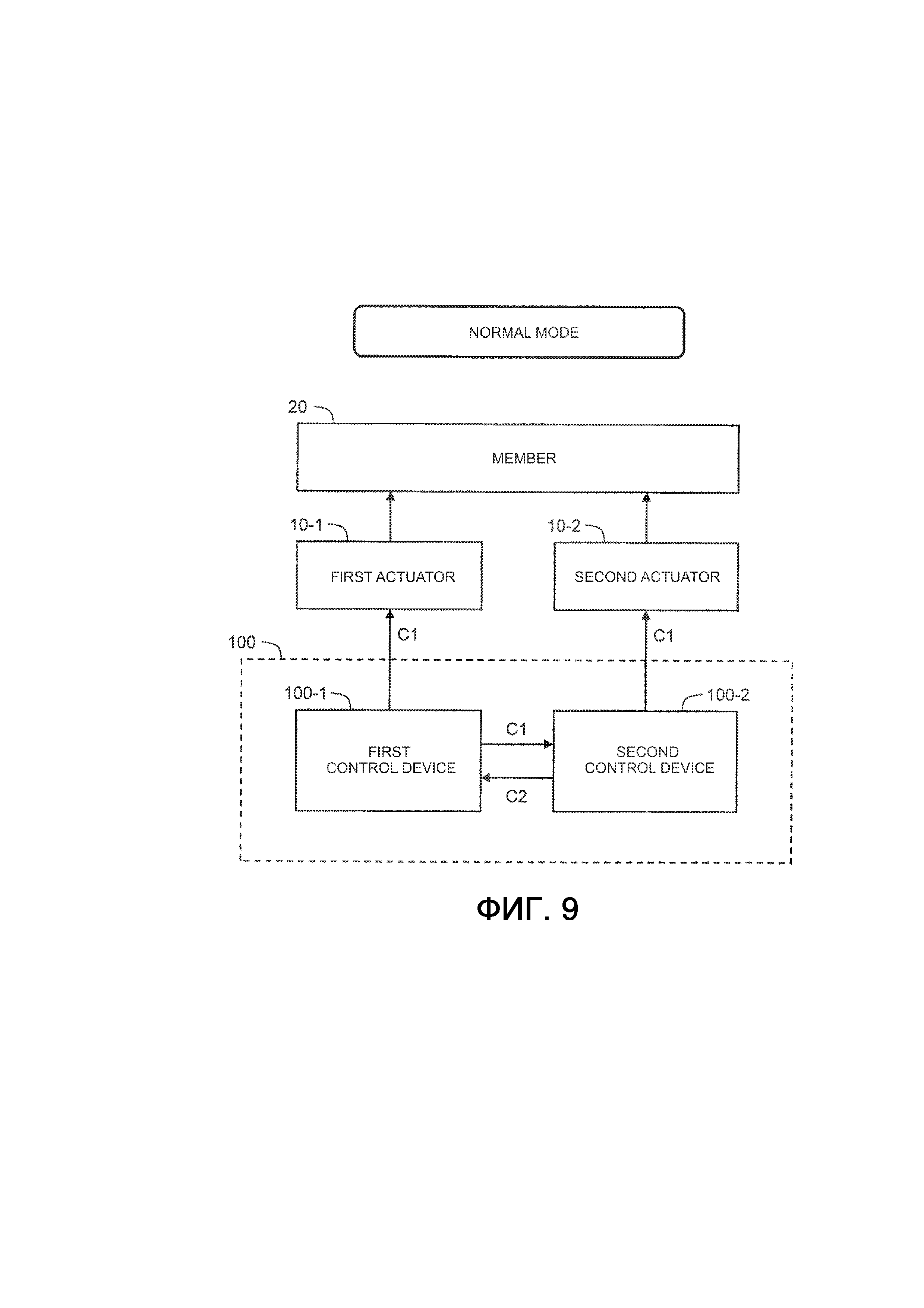
[0046] Фиг. 9 является блок-схемой, полезной для описания нормального режима устройства 100 управления. В нормальном режиме, первое устройство 100-1 управления и второе устройство 100-2 управления обмениваются данными между собой и работают синхронно друг с другом. Как описано выше, первое устройство 100-1 управления и второе устройство 100-2 управления вычисляют идентичную управляемую переменную C, в качестве первой управляемой переменной C1 и второй управляемой переменной C2, соответственно (см. фиг. 7 и фиг. 8).
[0047] Тем не менее, незначительная разность может возникать между первой управляемой переменной C1 и второй управляемой переменной C2 вследствие варьирований при изготовлении, шума и т.д., как описано выше. Соответственно, когда первый привод 10-1 управляется с первой управляемой переменной C1, и второй привод 10-2 управляется со второй управляемой переменной C2, шум и вибрация могут формироваться в приводе 10.
[0048] Таким образом, в нормальном режиме, устройство 100 управления управляет как первым приводом 10-1, так и вторым приводом 10-2 согласно первой управляемой переменной C1 главной системы, с тем чтобы ограничивать шум и вибрацию. Другими словами, устройство 100 управления управляет как первым приводом 10-1, так и вторым приводом 10-2 без использования второй управляемой переменной C2.
[0049] Более конкретно, первое устройство 100-1 управления управляет первым приводом 10-1 согласно первой управляемой переменной C1, вычисленной отдельно. Кроме того, первое устройство 100-1 управления отправляет первую управляемую переменную C1 во второе устройство 100-2 управления. Второе устройство 100-2 управления принимает первую управляемую переменную C1 из первого устройства 100-1 управления и управляет вторым приводом 10-2 согласно принимаемой первой управляемой переменной C1. Поскольку первый привод 10-1 и второй привод 10-2 управляются согласно первой управляемой переменной C1, шум и вибрация должны формироваться с меньшей вероятностью или с очень небольшой вероятностью.
1-3-2. Независимый режим
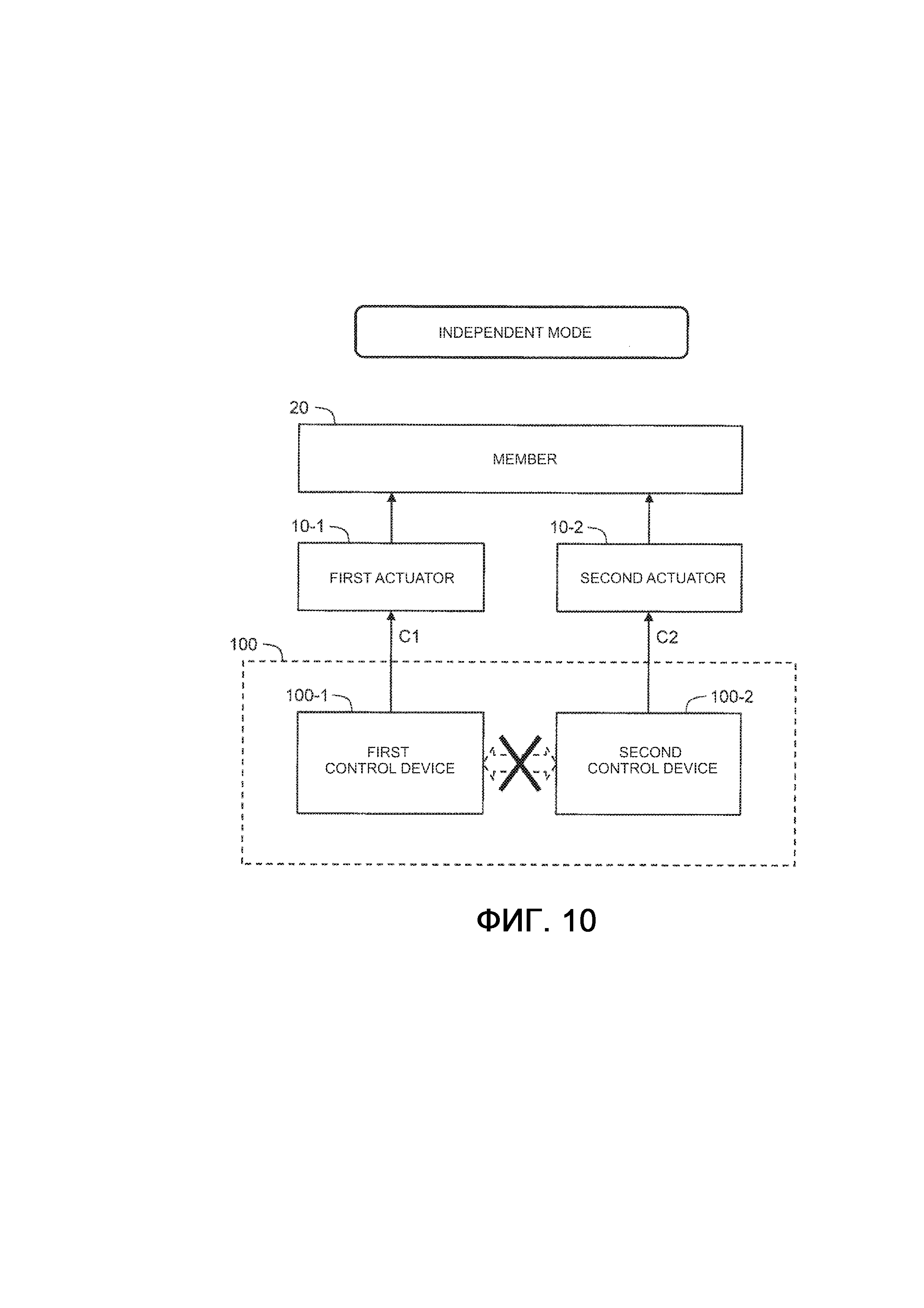
[0050] Фиг. 10 является блок-схемой, полезной для описания независимого режима устройства 100 управления. В независимом режиме, устройство 100 управления блокирует связь между первым устройством 100-1 управления и вторым устройством 100-2 управления. Первое устройство 100-1 управления и второе устройство 100-2 управления работают независимо друг от друга без обмена данными друг с другом.
[0051] Первое устройство 100-1 управления управляет первым приводом 10-1 согласно вычисленной первой управляемой переменной C1. Одновременно, второе устройство 100-2 управления управляет вторым приводом 10-2 согласно вычисленной второй управляемой переменной C2. Другими словами, первое устройство 100-1 управления и второе устройство 100-2 управления управляют первым приводом 10-1 и вторым приводом 10-2 независимо друг от друга. Ниже описываются использование и значимость независимого режима.
1-3-3. Резервный режим
[0052] Каждое из первого устройства 100-1 управления и второго устройства 100-2 управления имеет функцию самодиагностики (функцию самомониторинга) непосредственного обнаружения анормальности. Функция самодиагностики представляет собой общую функцию, установленную в микрокомпьютере, и ее подробное описание не предоставляется. Когда возникновение анормальности в i-ом устройстве 100-i управления (i=1 или 2) подтверждается через функцию самодиагностики, i-ое устройство 100-i управления прекращает работу.
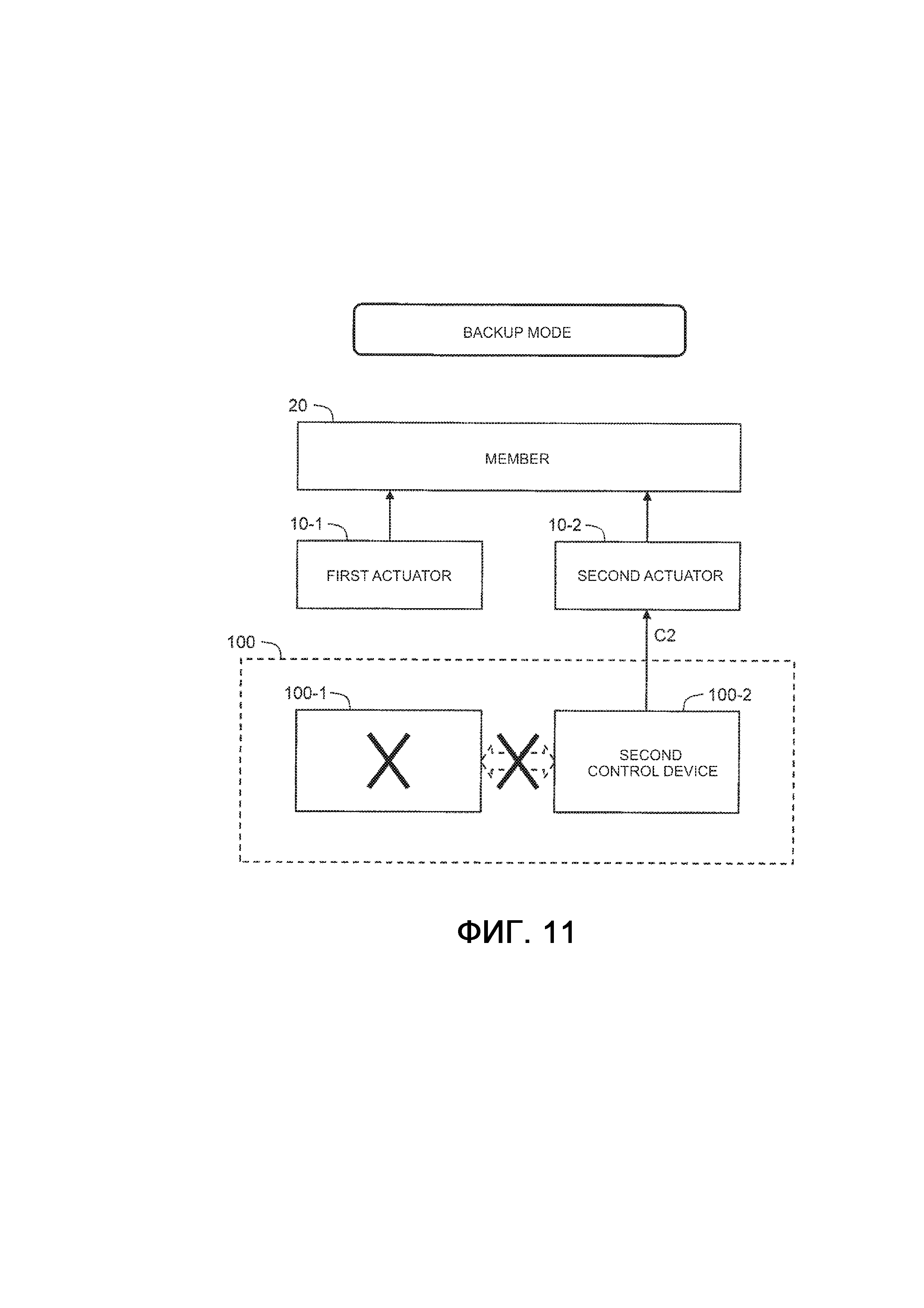
[0053] Когда возникновение анормальности в одном из первого устройства 100-1 управления и второго устройства 100-2 управления подтверждается через функцию самодиагностики, устройство 100 управления переключает рабочий режим на "резервный режим". В резервном режиме, другое из первого устройства 100-1 управления и второго устройства 100-2 управления управляет приводом 10.
[0054] Фиг. 11 является блок-схемой, полезной для описания резервного режима устройства 100 управления. В качестве одного примера, в дальнейшем рассматривается случай, в котором анормальность возникает в первом устройстве 100-1 управления главной системы. Когда возникновение анормальности подтверждается через функцию самодиагностики, первое устройство 100-1 управления выводит сигнал ошибки и прекращает работу. Второе устройство 100-2 управления вспомогательной системы переключает рабочий режим на резервный режим, в ответ на сигнал ошибки. Затем второе устройство 100-2 управления управляет вторым приводом 10-2, согласно второй управляемой переменной C2.
1-4. Знак анормальности и независимый режим
[0055] В течение нормального режима, анормальность (сбой) может возникать в первом устройстве 100-1 управления или втором устройстве 100-2 управления. В частности, когда анормальность возникает в первом устройстве 100-1 управления главной системы, первая управляемая переменная C1, вычисленная посредством первого устройства 100-1 управления, может становиться ошибочным значением (анормальным значением). Когда первая управляемая переменная C1 становится ошибочным значением, привод 10, управляемый согласно первой управляемой переменной C1, доставляет ошибочную силу в элемент 20. С точки зрения движения транспортного средства, нежелательно, если ошибочная сила прикладывается к элементу 20, связанному с рулением, поскольку это приводит к нестабильности руления. Кроме того, водитель транспортного средства может испытывать странное или некомфортное ощущение в отношении руления.
[0056] Таким образом, этот вариант осуществления предоставляет технологию, которая может быстро ограничивать влияние ошибочного вывода привода 10 на элемент 20, когда анормальность возникает в первом устройстве 100-1 управления. С этой целью, первоначально необходимо обнаруживать возникновение анормальности в течение нормального режима.
[0057] Например, рассматривается использование функции самодиагностики, как описано выше. Тем не менее, требуется определенная продолжительность (например, несколько десятков миллисекунд) для того, чтобы подтверждать возникновение анормальности через функцию самодиагностики. Соответственно, когда анормальность возникает в первом устройстве 100-1 управления, имеется определенный период времени от возникновения анормальности до прекращения работы первого устройства 100-1 управления. В течение этого периода, ошибочный вывод привода 10 продолжается. Даже если ошибочный вывод продолжается в течение нескольких десятков миллисекунд, с точки зрения движения транспортного средства, нежелательно, если в основном ошибочная сила продолжает прикладываться к элементу 20, такому как руль или колеса.
[0058] Таким образом, в этом варианте осуществления, внимание сосредоточено на "знаке анормальности" в устройстве 100 управления
1-4-1. Обнаружение знака анормальности
Первый пример знака анормальности
[0059] Когда "расхождение" возникает между первой управляемой переменной C1, вычисленной посредством первого устройства 100-1 управления, и второй управляемой переменной C2, вычисленной посредством второго устройства 100-2 управления, анормальность с очень большой вероятностью должна возникать в первом устройстве 100-1 управления или втором устройстве 100-2 управления. Таким образом, присутствие расхождения между первой управляемой переменной C1 и второй управляемой переменной C2 распознается в качестве "знака анормальности".
[0060] Здесь, "расхождение" вызывается посредством анормальности в первом устройстве 100-1 управления или втором устройстве 100-2 управления и значительно больше вышеуказанной незначительной разности вследствие варьирований при изготовлении или шума. Когда разность между первой управляемой переменной C1 и второй управляемой переменной C2 равна или выше порогового значения, определяется то, что имеется "расхождение" между первой управляемой переменной C1 и второй управляемой переменной C2.
[0061] В течение нормального режима, первое устройство 100-1 управления и второе устройство 100-2 управления отправляют и принимают, соответственно, вычисленные управляемые переменные C (первую управляемую переменную C1, вторую управляемую переменную C2) между собой, через связь (см. фиг. 9). А именно, первое устройство 100-1 управления отправляет вычисленную первую управляемую переменную C1 во второе устройство 100-2 управления. Второе устройство 100-2 управления принимает первую управляемую переменную C1 из первого устройства 100-1 управления. Кроме того, второе устройство 100-2 управления отправляет вычисленную вторую управляемую переменную C2 в первое устройство 100-1 управления. Первое устройство 100-1 управления принимает вторую управляемую переменную C2 из второго устройства 100-2 управления.
[0062] Первое устройство 100-1 управления сравнивает первую управляемую переменную C1, вычисленную отдельно, со второй управляемой переменной C2, принимаемой из второго устройства 100-2 управления, с тем чтобы определять то, имеется или нет расхождение между первой управляемой переменной C1 и второй управляемой переменной C2. Когда разность между первой управляемой переменной C1 и второй управляемой переменной C2 равна или выше порогового значения, первое устройство 100-1 управления определяет то, что имеется расхождение между первой управляемой переменной C1 и второй управляемой переменной C2.
[0063] Аналогично, второе устройство 100-2 управления сравнивает вторую управляемую переменную C2, вычисленную отдельно, с первой управляемой переменной C1, принимаемой из первого устройства 100-1 управления, с тем чтобы определять то, имеется или нет расхождение между первой управляемой переменной C1 и второй управляемой переменной C2. Когда разность между первой управляемой переменной C1 и второй управляемой переменной C2 равна или выше порогового значения, второе устройство 100-2 управления определяет то, что имеется расхождение между первой управляемой переменной C1 и второй управляемой переменной C2.
Второй пример знака анормальности
[0064] В качестве другого примера, возникновение анормальности в связи между первым устройством 100-1 управления и вторым устройством 100-2 управления может распознаваться в качестве "знака анормальности". Это обусловлено тем, что первое устройство 100-1 управления или второе устройство 100-2 управления может быть неисправным, когда возникает такая анормальность связи.
[0065] Например, первое устройство 100-1 управления формирует код обнаружения ошибок, такой как контрольная сумма, относительно информации первой управляемой переменной C1. Затем первое устройство 100-1 управления отправляет первую управляемую переменную C1 и код обнаружения ошибок, которые ассоциированы друг с другом, во второе устройство 100-2 управления. Второе устройство 100-2 управления определяет то, изменена или нет информация первой управляемой переменной C1 в ходе связи, на основе принимаемой первой управляемой переменной C1 и кода обнаружения ошибок. Когда информация первой управляемой переменной C1 изменена в ходе связи, второе устройство 100-2 управления определяет то, что возникает анормальность связи.
[0066] Аналогично, второе устройство 100-2 управления вычисляет код обнаружения ошибок, такой как контрольная сумма, относительно информации второй управляемой переменной C2. Затем второе устройство 100-2 управления отправляет вторую управляемую переменную C2 и код обнаружения ошибок, которые ассоциированы друг с другом, в первое устройство 100-1 управления. Первое устройство 100-1 управления определяет то, изменена или нет информация второй управляемой переменной C2 в ходе связи, на основе принимаемой второй управляемой переменной C2 и кода обнаружения ошибок. Когда информация второй управляемой переменной C2 изменена в ходе связи, первое устройство 100-1 управления определяет то, что возникает анормальность связи.
[0067] Кроме того, когда первое устройство 100-1 управления не принимает вторую управляемую переменную C2 из второго устройства 100-2 управления в течение данного периода времени, оно может определять то, что возникает анормальность связи. Аналогично, когда второе устройство 100-2 управления не принимает первую управляемую переменную C1 из первого устройства 100-1 управления в течение данного периода времени, оно может определять то, что возникает анормальность связи.
1-4-2. Переключение из нормального режима в независимый режим
[0068] Когда имеется расхождение между первой управляемой переменной C1 и второй управляемой переменной C2, или имеется анормальность в связи между первым устройством 100-1 управления и вторым устройством 100-2 управления, устройство 100 управления обнаруживает (распознает) его/ее в качестве знака анормальности. На этой стадии, то, какое из первого устройства 100-1 управления и второго устройства 100-2 управления испытывает анормальность, не подтверждено. Тем не менее, при обнаружении знака анормальности, устройство 100 управления сразу переключает рабочий режим из нормального режима в независимый режим.
[0069] Более конкретно, одно из первого устройства 100-1 управления и второго устройства 100-2 управления обнаруживает знак анормальности. Устройство, которое обнаруживает знак анормальности, называется "устройством 100-A управления обнаружением". Другое из первого устройства 100-1 управления и второго устройства 100-2 управления называется "уведомляемым устройством 100-B управления".
[0070] Устройство 100-A управления обнаружением переключает свой рабочий режим из нормального режима в независимый режим и начинает работу в независимом режиме. Дополнительно, устройство 100-A управления обнаружением уведомляет уведомляемое устройство 100-B управления относительно переключения из нормального режима в независимый режим. Затем устройство 100-A управления обнаружением блокирует связь с уведомляемым устройством 100-B управления.
[0071] Уведомляемое устройство 100-B управления принимает уведомление относительно переключения из устройства 100-A управления обнаружением. Уведомляемое устройство 100-B управления переключает свой рабочий режим из нормального режима в независимый режим, в ответ на уведомление относительно переключения и начинает работу в независимом режиме. Кроме того, уведомляемое устройство 100-B управления блокирует связь с устройством 100-A управления обнаружением.
[0072] Типично, как первое устройство 100-1 управления, так и второе устройство 100-2 управления функционируют в качестве устройства 100-A управления обнаружением. Тем не менее, только одно из первого устройства 100-1 управления и второго устройства 100-2 управления может функционировать в качестве устройства 100-A управления обнаружением.
1-4-3. Преимущество независимого режима
[0073] В дальнейшем рассматривается случай, в котором анормальность возникает в первом устройстве 100-1 управления главной системы, и первая управляемая переменная C1 становится ошибочным значением (анормальным значением). Вторая управляемая переменная C2, вычисленная посредством второго устройства 100-2 управления, предположительно остается корректной.
[0074] Фиг. 12 является схематичным видом, полезным для описания преимущества независимого режима. Вертикальная ось указывает ошибочную силу (или крутящий момент), прикладываемую к элементу 20. Допустимый уровень представляет собой наибольшую ошибочную силу, которая может разрешаться. Например, когда элемент 20 представляет собой руль, допустимый уровень представляет ошибочный крутящий момент, достаточно небольшой для того, чтобы обеспечивать возможность водителю немедленно удерживать руль.
[0075] Первоначально, в дальнейшем рассматривается случай, в котором отсутствует независимый режим, в качестве сравнительного примера. Анормальность возникает в первом устройстве 100-1 управления, и как первый привод 10-1, так и второй привод 10-2 управляются согласно ошибочной первой управляемой переменной C1. Как результат, как первый привод 10-1, так и второй привод 10-2 формируют ошибочную силу. Вследствие ошибочных выводов (ошибочной управляемой переменной) как первого привода 10-1, так и второго привода 10-2, большая ошибочная сила прикладывается к элементу 20. Даже в случае, если уменьшение силы, вызываемое посредством инерции и трения, учитывается, большая ошибочная сила, которая превышает допустимый уровень, прикладывается к элементу 20.
[0076] С другой стороны, согласно этому варианту осуществления, первый привод 10-1 управляется согласно ошибочной первой управляемой переменной C1, но второй привод 10-2 управляется согласно корректной второй управляемой переменной C2. Соответственно, по меньшей мере, второй привод 10-2 формирует корректную силу. Как результат, ошибочный вывод (ошибочная управляемая переменная) привода 10 в целом уменьшается таким образом, что он меньше ошибочного вывода в случае сравнительного примера.
[0077] Дополнительно, следующее преимущество получается, поскольку привод 10 имеет дуплексную конфигурацию.
[0078] Первый привод 10-1 и второй привод 10-2 сцепляются с идентичным элементом 20, и сила прикладывается к идентичному элементу 20 одновременно. Даже когда первый привод 10-1 пытается перемещать элемент 20 с ошибочной силой, второй привод 10-2 перемещает элемент 20 с корректной силой одновременно. Например, даже когда первый привод 10-1 пытается перемещать элемент 20 сильно, элемент 20 фактически не перемещается намеченным образом. В этом случае, корректная сила, прикладываемая из нормального второго привода 10-2, функционирует в качестве физического "тормоза" против ошибочной силы. А именно, нормальный второй привод 10-2 функционирует с возможностью компенсировать ошибочный вывод первого привода 10-1. Как результат, влияние ошибочного вывода привода 10 на элемент 20 ограничивается (ослабляется).
[0079] Типично, управление (типично, управление с обратной связью) второго привода 10-2 посредством нормального второго устройства 100-2 управления является более сильным, чем управление первым приводом 10-1 посредством анормального первого устройства 100-1 управления. В этом случае, перемещение элемента 20 управляется главным образом посредством корректной силы, прикладываемой из второго привода 10-2. Как результат, влияние ошибочного вывода привода 10 на элемент 20 дополнительно ограничивается.
[0080] Таким образом, в этом варианте осуществления, ошибочный вывод привода 10 в целом уменьшается таким образом, что он меньше ошибочного вывода сравнительного примера. Дополнительно, нормальный второй привод 10-2 функционирует с возможностью компенсировать ошибочный вывод первого привода 10-1. При двухстадийной операции, ошибочная сила, прикладываемая к элементу 20, уменьшается в достаточной степени, как показано на фиг. 12. Как результат, руление или движение транспортного средства стабилизируется. Кроме того, водитель с меньшей вероятностью или с очень небольшой вероятностью должен испытывать странное или некомфортное ощущение в отношении движения транспортного средства и руления.
[0081] Даже когда анормальность возникает во втором устройстве 100-2 управления вспомогательной системы, преимущество компенсации ошибочного вывода второго привода 10-2 получается из нормального первого привода 10-1.
[0082] Ссылаясь далее на фиг. 13, описывается взаимосвязь между независимым режимом и резервным режимом. На графике, показанном на фиг. 13, горизонтальная ось указывает время, и вертикальная ось указывает ошибочную силу, прикладываемую к элементу 20.
[0083] Первоначально, устройство 100 управления работает в нормальном режиме. Во время TA в течение нормального режима, анормальность возникает в первом устройстве 100-1 управления; как результат, ошибочный вывод привода 10 формируется. Первое устройство 100-1 управления, имеющее функцию самодиагностики, определяет возникновение анормальности. Во время TB, которое позже времени TA, первое устройство 100-1 управления с функцией самодиагностики подтверждает возникновение анормальности. Продолжительность от времени TA до времени TB, например, составляет приблизительно несколько десятков миллисекунд. Во время TB, устройство 100 управления начинает резервный режим.
[0084] В нормальном режиме, первое устройство 100-1 управления и второе устройство 100-2 управления отправляют и принимают, соответственно, вычисленные управляемые переменные C (первую управляемую переменную C1, вторую управляемую переменную C2) между собой, через связь. Когда расхождение возникает между первой управляемой переменной C1 и второй управляемой переменной C2, или когда анормальность возникает в связи между первым устройством 100-1 управления и вторым устройством 100-2 управления, устройство 100 управления обнаруживает его/ее в качестве знака анормальности. Знак анормальности обнаруживается в гораздо более ранний момент времени, чем подтверждение анормальности через функцию самодиагностики. Как показано на фиг. 13, знак анормальности обнаруживается во время TX, которое гораздо раньше времени TB. Продолжительность от времени TA до времени TX, например, составляет примерно одну миллисекунду.
[0085] На стадии времени TX, не подтверждено то, какое из первого устройства 100-1 управления и второго устройства 100-2 управления затрагивается анормальностью. Тем не менее, устройство 100 управления переключает рабочий режим из нормального режима в независимый режим во время TX, когда обнаруживается знак анормальности. Как результат, начальное время независимого режима раньше начального времени резервного режима.
[0086] Верхний график на фиг. 13 показывает случай сравнительного примера, имеющего независимый режим. В случае сравнительного примера, большая ошибочная сила продолжает прикладываться к элементу 20, в течение периода от времени TA до времени TB. Даже если период составляет несколько десятков миллисекунд, с точки зрения движения транспортного средства, нежелательно, если большая ошибочная сила продолжает прикладываться к элементу 20, такому как рули или колеса.
[0087] С другой стороны, согласно этому варианту осуществления, независимый режим начинается на стадии времени TX, когда обнаруживается знак анормальности. Как результат, ошибочная сила, прикладываемая к элементу 20, уменьшается, хотя степень уменьшения меньше степени уменьшения в резервном режиме. Соответственно, как показано на фиг. 13, период, в который большая ошибочная сила прикладывается к элементу 20, значительно сокращается по сравнению со случаем сравнительного примера.
[0088] Как описано выше, согласно этому варианту осуществления, когда анормальность возникает в первом устройстве 100-1 управления главной системы, влияние ошибочного вывода привода 10 на элемент 20, связанный с рулением, может быстро ограничиваться (ослабляться). А именно, период, в который большая ошибочная сила прикладывается к элементу 20, связанному с рулением, сокращается. Как результат, руление или движение транспортного средства стабилизируется. Кроме того, водитель с меньшей вероятностью или с очень небольшой вероятностью должен испытывать странное или некомфортное ощущение в отношении движения транспортного средства и руления.
1-5. Последовательность операций обработки
[0089] Фиг. 14 является блок-схемой последовательности операций способа, в общем, описывающей обработку, выполняемую посредством устройства 100 управления согласно этому варианту осуществления.
[0090] На этапе S100, устройство 100 управления работает в нормальном режиме (см. фиг. 9). Устройство 100 управления управляет первым приводом 10-1 и вторым приводом 10-2 согласно первой управляемой переменной C1 без использования второй управляемой переменной C2. Кроме того, первое устройство 100-1 управления и второе устройство 100-2 управления отправляют и принимают, соответственно, вычисленные управляемые переменные C (первую управляемую переменную C1, вторую управляемую переменную C2) между собой, через связь.
[0091] На этапе S200, устройство 100 управления определяет то, имеется или нет знак анормальности. Более конкретно, устройство 100 управления определяет то, возникает или нет расхождение между первой управляемой переменной C1 и второй управляемой переменной C2, либо то, возникает или нет анормальность в связи между первым устройством 100-1 управления и вторым устройством 100-2 управления. Когда знак анормальности обнаруживается (этап S200: "Да"), управление переходит к этапу S300. В противном случае (этап S200: "Нет"), управление возвращается к этапу S100.
[0092] На этапе S300, рабочий режим устройства 100 управления переключается из нормального режима в независимый режим. В независимом режиме, первое устройство 100-1 управления управляет первым приводом 10-1 согласно первой управляемой переменной C1. Одновременно, второе устройство 100-2 управления управляет вторым приводом 10-2 согласно вычисленной второй управляемой переменной C2 (см. фиг. 10).
[0093] Когда устройство 100 управления не восстанавливается после анормальности, оно подтверждает возникновение анормальности через функцию самодиагностики. После того как возникновение анормальности подтверждается, устройство 100 управления работает в резервном режиме. Начальное время резервного режима позже начального времени независимого режима. Когда устройство 100 управления восстанавливается после анормальности, устройство 100 управления возобновляет связь между первым устройством 100-1 управления и вторым устройством 100-2 управления и возвращается в нормальный режим.
1-6. Краткие сведения
[0094] Согласно этому варианту осуществления, привод 10, который прикладывает силу к элементу 20, связанному с рулением, имеет дуплексную конфигурацию, включающую в себя первый привод 10-1 главной системы и второй привод 10-2 вспомогательной системы. Устройство 100 управления, которое управляет приводом 10, имеет дуплексную конфигурацию, включающую в себя первое устройство 100-1 управления главной системы и второе устройство 100-2 управления вспомогательной системы. Первое устройство 100-1 управления и второе устройство 100-2 управления вычисляют идентичную управляемую переменную C, в качестве первой управляемой переменной C1 и второй управляемой переменной C2, соответственно.
[0095] В нормальном режиме, устройство 100 управления управляет как первым приводом 10-1, так и вторым приводом 10-2, согласно первой управляемой переменной C1, вычисленной посредством первого устройства 100-1 управления главной системы. Таким образом, шум и вибрация должны формироваться с меньшей вероятностью или с очень небольшой вероятностью в приводе 10.
[0096] Когда анормальность возникает в первом устройстве 100-1 управления, вычисленная первая управляемая переменная C1 может становиться ошибочным значением. Когда первая управляемая переменная C1 становится ошибочным значением, первый привод 10-1 и второй привод 10-2 формируют ошибочную силу. С учетом этой ситуации, предоставляется независимый режим, в дополнение к нормальному режиму.
[0097] В независимом режиме, первое устройство 100-1 управления управляет первым приводом 10-1 согласно первой управляемой переменной C1, и второе устройство 100-2 управления управляет вторым приводом 10-2 согласно второй управляемой переменной C2. Даже когда первая управляемая переменная C1 становится ошибочным значением, второй привод 10-2, управляемый согласно корректной второй управляемой переменной C2, формирует корректную силу. Соответственно, переключение из нормального режима в независимый режим приводит к уменьшению ошибочного вывода привода 10 в целом.
[0098] Дополнительно, первый привод 10-1 и второй привод 10-2 сцепляются с идентичным элементом 20 и прикладывают силу к идентичному элементу 20 одновременно. Даже когда первый привод 10-1 пытается перемещать элемент 20 с ошибочной силой, второй привод 10-2 перемещает элемент 20 с корректной силой одновременно. А именно, нормальный второй привод 10-2 функционирует с возможностью компенсировать ошибочный вывод первого привода 10-1. Таким образом, влияние ошибочного вывода привода 10 на элемент 20 ограничивается (ослабляется).
[0099] Переключение из нормального режима в независимый режим выполняется в ответ на обнаружение "знака анормальности". Более конкретно, в течение нормального режима, первое устройство 100-1 управления и второе устройство 100-2 управления отправляют и принимают, соответственно, вычисленные управляемые переменные C (первую управляемую переменную C1, вторую управляемую переменную C2) между собой через связь. Когда расхождение возникает между первой управляемой переменной C1 и второй управляемой переменной C2, или анормальность возникает в связи между первым устройством 100-1 управления и вторым устройством 100-2 управления, устройство 100 управления обнаруживает его/ее в качестве знака анормальности. Знак анормальности может обнаруживаться раньше подтверждения возникновения анормальности. Соответственно, независимый режим может быстро начинаться.
[0100] Как описано выше, согласно этому варианту осуществления, когда анормальность возникает в первом 100 устройстве управления главной системы, влияние ошибочного вывода привода 10 на элемент 20, связанный с рулением, может быстро ограничиваться (ослабляться). Как результат, руление или движение транспортного средства стабилизируется. Кроме того, водитель с меньшей вероятностью или с очень небольшой вероятностью должен испытывать странное или некомфортное ощущение в отношении движения транспортного средства и руления.
2. Второй вариант осуществления
[0101] Во втором варианте осуществления, в дальнейшем описывается пример функциональной конфигурации устройства 100 управления. Описание, которое перекрывает описание первого варианта осуществления, опускается надлежащим образом.
[0102] Фиг. 15 является блок-схемой, показывающей пример функциональной конфигурации устройства 100 управления. I-ое устройство 100-i управления (i=1 или 2) включает в себя модуль 200-i вычисления управляемых переменных, модуль 300-i связи, модуль 400-i определения, модуль 500-i переключения и модуль 600-i приведения в действие. Процессор 101 i-ого устройства 100-i управления выполняет управляющие программы, сохраненные в запоминающем устройстве 102, с тем чтобы реализовывать модуль 200-i вычисления управляемых переменных, модуль 400-i определения и модуль 500-i переключения. Модуль 300-i связи включает в себя передающее устройство, приемное устройство и интерфейс связи. Модуль 600-i приведения в действие включает в себя схему приведения в действие, такую как инвертор.
2-1. Нормальный режим
[0103] Фиг. 16 является блок-схемой, полезной для описания нормального режима согласно этому варианту осуществления. Первоначально, в дальнейшем описывается первое устройство 100-1 управления.
[0104] Модуль 200-1 вычисления управляемых переменных вычисляет первую управляемую переменную C1 на основе информации SEN по обнаружению (или первой информации SEN-1 по обнаружению). Модуль 200-1 вычисления управляемых величин выводит вычисленную первую управляемую переменную C1 в модуль 300-1 связи, модуль 400-1 определения и модуль 500-1 переключения.
[0105] Модуль 300-1 связи выполняет связь со вторым устройством 100-2 управления. Например, модуль 300-1 связи отправляет первую управляемую переменную C1 во второе устройство 100-2 управления. Кроме того, модуль 300-1 связи принимает вторую управляемую переменную C2, передаваемую из второго устройства 100-2 управления. Модуль 300-1 связи выводит принимаемую вторую управляемую переменную C2 в модуль 400-1 определения и модуль 500-1 переключения.
[0106] Модуль 400-1 определения определяет то, имеется или нет знак анормальности. Более конкретно, модуль 400-1 определения сравнивает первую управляемую переменную C1 со второй управляемой переменной C2, с тем чтобы определять то, возникает или нет расхождение между первой управляемой переменной C1 и второй управляемой переменной C2. Когда разность между первой управляемой переменной C1 и второй управляемой переменной C2 равна или выше предварительно определенного порогового значения, модуль 400-1 определения определяет то, что имеется расхождение между первой управляемой переменной C1 и второй управляемой переменной C2. Кроме того, модуль 400-1 определения определяет то, возникает или нет анормальность связи, на основе второй управляемой переменной C2, принимаемой из второго устройства 100-2 управления. Затем модуль 400-1 определения выводит сигнал с результатом определения, указывающий результат определения, в модуль 500-1 переключения.
[0107] Модуль 500-1 переключения переключает рабочий режим согласно сигналу с результатом определения. Когда сигнал с результатом определения не указывает обнаружение знака анормальности, модуль 500-1 переключения выбирает нормальный режим. В нормальном режиме, модуль 500-1 переключения выводит первую управляемую переменную C1, вычисленную посредством модуля 200-1 вычисления управляемых переменных, в модуль 600-1 приведения в действие.
[0108] Модуль 600-1 приведения в действие приводит в действие первый привод 10-1, согласно первой управляемой переменной C1, передаваемой из модуля 500-1 переключения. Например, модуль 600-1 приведения в действие формирует сигнал управления по току (например, управляющий PWM-сигнал) согласно первой управляемой переменной C1 и подает ток приведения в действие (например, трехфазный переменный ток) в первый привод 10-1 согласно сигналу управления по току. Первый привод 10-1 приводится в действие с помощью тока приведения в действие и прикладывает силу к элементу 20.
[0109] Работа второго устройства 100-2 управления по существу является аналогичной работе первого устройства 100-1 управления. В вышеприведенном описании работы первого устройства 100-1 управления, "первое" заменяется "вторым", "-1", заменяется "-2", "C1" заменяется "C2", "второе" заменяется "первым", "-2" заменяется "-1", и "C2" заменяется "C1".
[0110] Тем не менее, следует отметить, что работа модуля 500-2 переключения второго устройства 100-2 управления отличается от работы модуля 500-1 переключения первого устройства 100-1 управления. В нормальном режиме, модуль 500-2 переключения выводит первую управляемую переменную C1, принимаемую из первого устройства 100-1 управления, в модуль 600-2 приведения в действие. Модуль 600-2 приведения в действие приводит в действие второй привод 10-2, согласно первой управляемой переменной C1, передаваемой из модуля 500-2 переключения.
[0111] Таким образом, первое устройство 100-1 управления управляет первым приводом 10-1 согласно вычисленной первой управляемой переменной C1. С другой стороны, второе устройство 100-2 управления управляет вторым приводом 10-2 согласно первой управляемой переменной C1, принимаемой из первого устройства 100-1 управления. А именно, в нормальном режиме, как первый привод 10-1, так и второй привод 10-2 управляются согласно первой управляемой переменной C1. Поскольку первый привод 10-1 и второй привод 10-2 управляются согласно первой управляемой переменной C1, шум и вибрация должны формироваться с меньшей вероятностью или с очень небольшой вероятностью.
2-2. Переключение из нормального режима в независимый режим
[0112] Как описано выше, модуль 500-1 переключения первого устройства 100-1 управления переключает рабочий режим согласно сигналу с результатом определения. Когда сигнал с результатом определения указывает обнаружение знака анормальности, модуль 500-1 переключения переключает рабочий режим из нормального режима в независимый режим. Кроме того, модуль 500-1 переключения уведомляет второе устройство 100-2 управления относительно переключения из нормального режима в независимый режим через модуль 300-1 связи. Затем модуль 300-1 связи блокирует связь со вторым устройством 100-2 управления.
[0113] Модуль 300-2 связи второго устройства 100-2 управления (уведомляемого устройства 100-B управления) принимает уведомление относительно переключения из первого устройства 100-1 управления (устройства 100-A управления обнаружением). Модуль 300-2 связи отправляет принимаемое уведомление относительно переключения в модуль 500-2 переключения. Модуль 500-2 переключения переключает рабочий режим из нормального режима в независимый режим, в ответ на уведомление относительно переключения. Затем модуль 300-2 связи блокирует связь с первым устройством 100-1 управления.
[0114] Аналогично, модуль 500-2 переключения второго устройства 100-2 управления переключает рабочий режим согласно сигналу с результатом определения. Когда сигнал с результатом определения указывает обнаружение знака анормальности, модуль 500-2 переключения переключает рабочий режим из нормального режима в независимый режим. Кроме того, модуль 500-2 переключения уведомляет первое устройство 100-1 управления относительно переключения из нормального режима в независимый режим через модуль 300-2 связи. Затем модуль 300-2 связи блокирует связь с первым устройством 100-1 управления.
[0115] Модуль 300-1 связи первого устройства 100-1 управления (уведомляемого устройства 100-B управления) принимает уведомление относительно переключения из второго устройства 100-2 управления (устройства 100-A управления обнаружением). Модуль 300-1 связи отправляет принимаемое уведомление относительно переключения в модуль 500-1 переключения. Модуль 500-1 переключения переключает рабочий режим из нормального режима в независимый режим, в ответ на уведомление относительно переключения. Затем модуль 300-1 связи блокирует связь со вторым устройством 100-2 управления.
2-3. Независимый режим
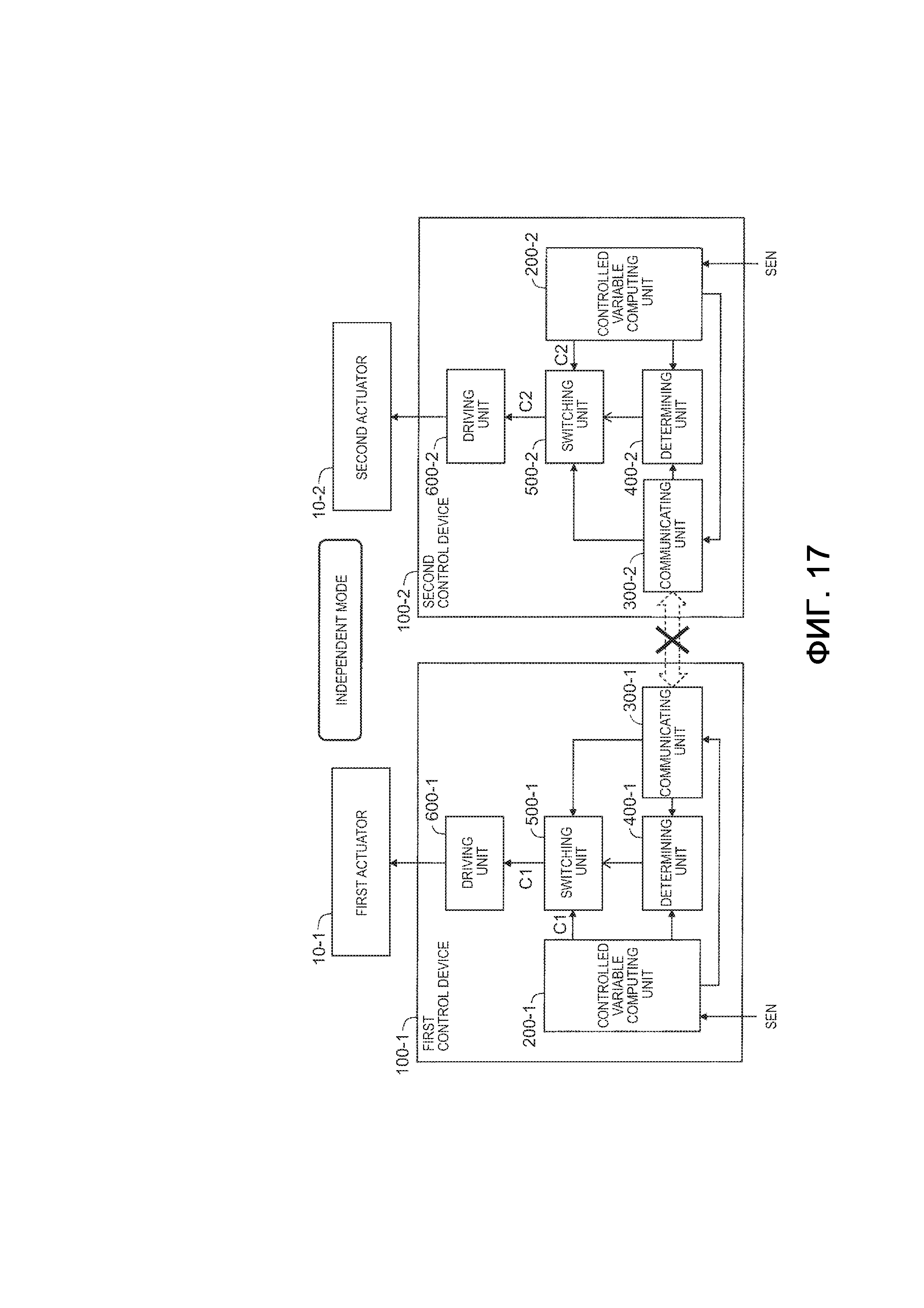
[0116] Фиг. 17 является блок-схемой, полезной для описания независимого режима согласно этому варианту осуществления. В независимом режиме, первое устройство 100-1 управления и второе устройство 100-2 управления работают независимо друг от друга без обмена данными друг с другом.
[0117] Более конкретно, модуль 500-1 переключения первого устройства 100-1 управления выводит первую управляемую переменную C1, вычисленную посредством модуля 200-1 вычисления управляемых переменных, в модуль 600-1 приведения в действие. Модуль 600-1 приведения в действие приводит в действие первый привод 10-1, согласно первой управляемой переменной C1, передаваемой из модуля 500-1 переключения. Таким образом, первое устройство 100-1 управления управляет первым приводом 10-1 согласно первой управляемой переменной C1.
[0118] Модуль 500-2 переключения второго устройства 100-2 управления выводит вторую управляемую переменную C2, вычисленную посредством модуля 200-2 вычисления управляемых переменных, в модуль 600-2 приведения в действие. Модуль 600-2 приведения в действие приводит в действие второй привод 10-2, согласно второй управляемой переменной C2, передаваемой из модуля 500-2 переключения. Таким образом, второе устройство 100-2 управления управляет вторым приводом 10-2 согласно второй управляемой переменной C2.
2-4. Резервный режим
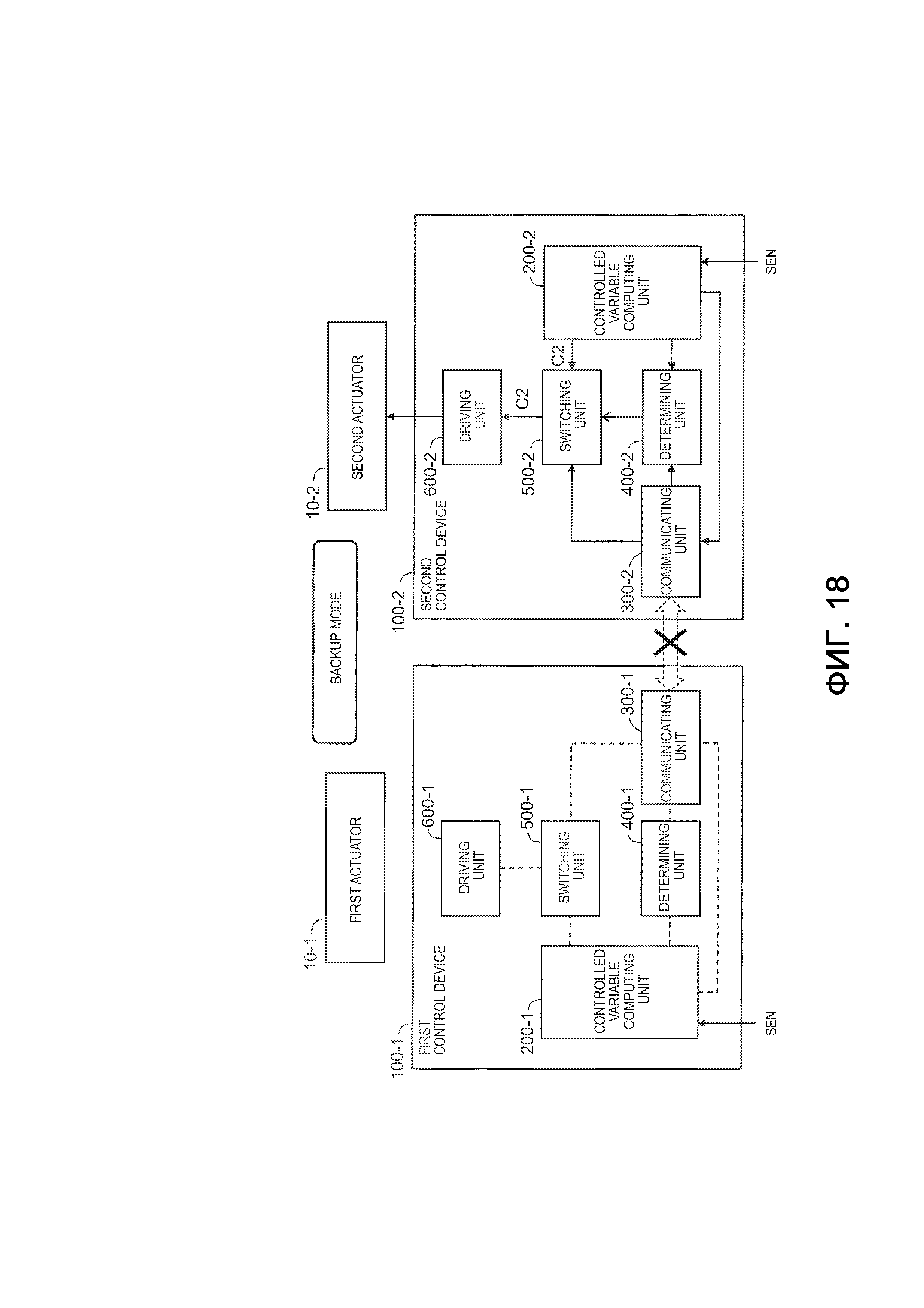
[0119] Фиг. 18 является блок-схемой, полезной для описания резервного режима согласно этому варианту осуществления. В качестве одного примера, в дальнейшем рассматривается случай, в котором анормальность возникает в первом 100 устройстве управления главной системы. Когда возникновение анормальности подтверждается через функцию самодиагностики, первое устройство 100-1 управления выводит сигнал ошибки и прекращает работу. Второе устройство 100-2 управления вспомогательной системы переключает рабочий режим на резервный режим, в ответ на сигнал ошибки.
[0120] В резервном режиме, модуль 500-2 переключения второго устройства 100-2 управления выводит вторую управляемую переменную C2, вычисленную посредством модуля 200-2 вычисления управляемых переменных, в модуль 600-2 приведения в действие. Модуль 600-2 приведения в действие приводит в действие второй привод 10-2, согласно второй управляемой переменной C2, передаваемой из модуля 500-2 переключения. Таким образом, второе устройство 100-2 управления управляет вторым приводом 10-2 согласно второй управляемой переменной C2.
3. Третий вариант осуществления
[0121] В третьем варианте осуществления, в дальнейшем рассматривается модифицированный пример нормального режима. Описание, которое перекрывает описание проиллюстрированных вариантов осуществления, опускается надлежащим образом.
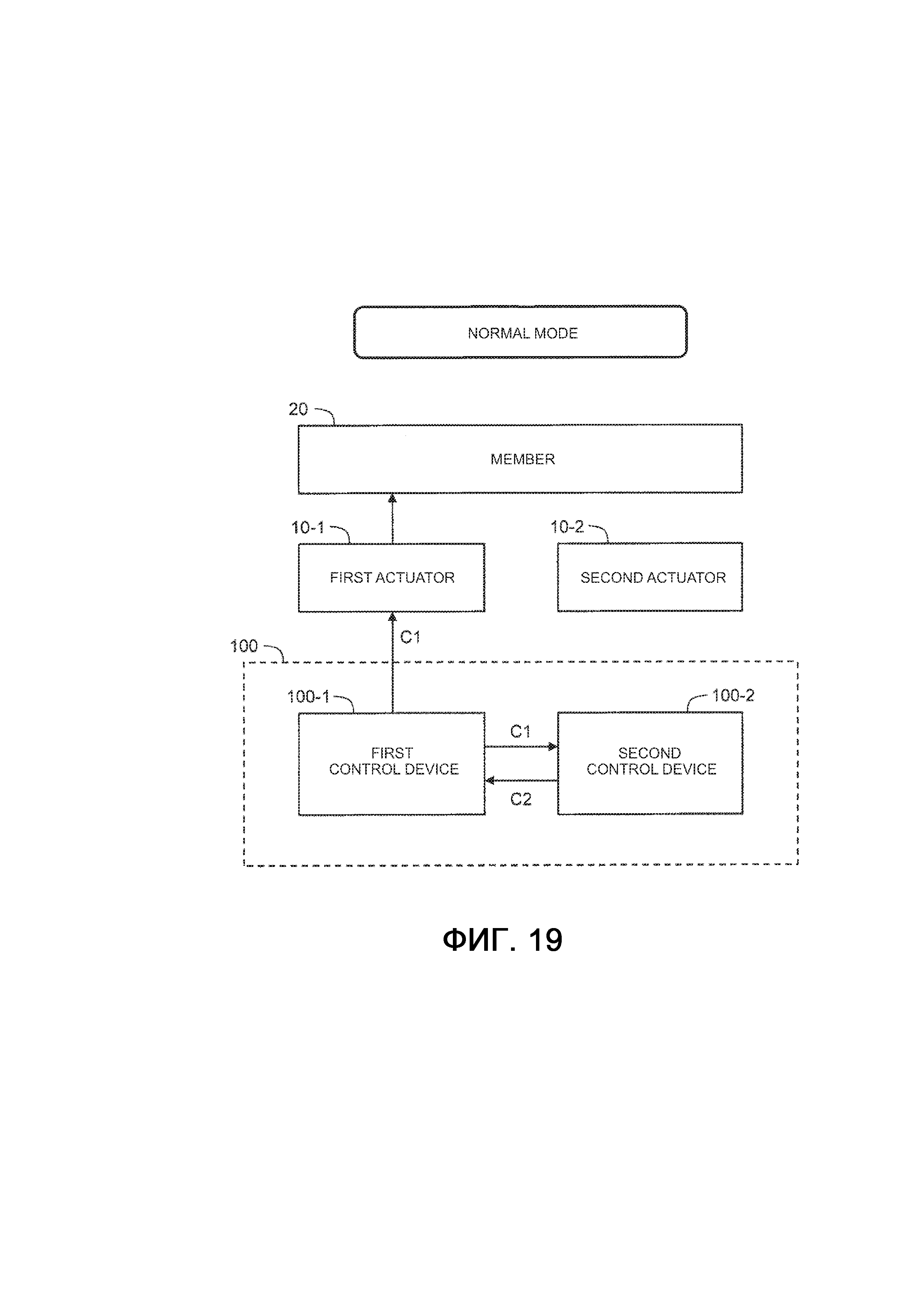
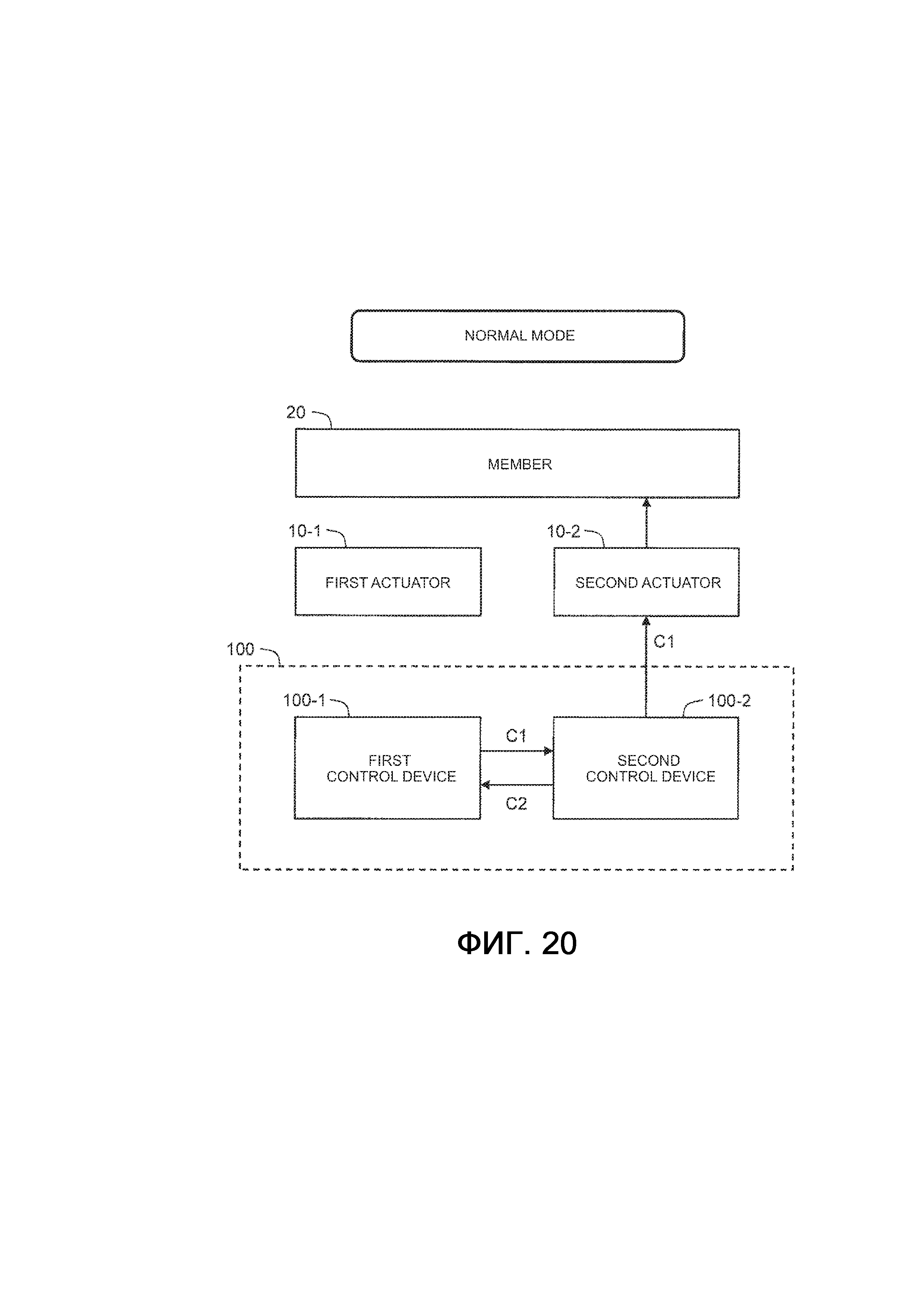
[0122] Фиг. 19 и фиг. 20 являются блок-схемами, полезными для описания нормального режима согласно третьему варианту осуществления. Согласно третьему варианту осуществления, устройство 100 управления, которое находится в нормальном режиме, управляет только одним из первого привода 10-1 и второго привода 10-2 согласно первой управляемой переменной C1. Кроме того, в этом случае, шум и вибрация должны формироваться с меньшей вероятностью или с очень небольшой вероятностью в приводе 10.
[0123] В примере, показанном на фиг. 19, первое устройство 100-1 управления управляет первым приводом 10-1 согласно первой управляемой переменной C1, вычисленной отдельно. Второе устройство 100-2 управления прекращает управление вторым приводом 10-2.
[0124] В примере, показанном на фиг. 20, второе устройство 100-2 управления принимает первую управляемую переменную C1 из первого устройства 100-1 управления и управляет вторым приводом 10-2 согласно принимаемой первой управляемой переменной C1. Первое устройство 100-1 управления прекращает управление первым приводом 10-1.
[0125] Обнаружение знака анормальности, переключение из нормального режима в независимый режим и независимый режим являются идентичными с обнаружением, переключением и независимым режимом в проиллюстрированных вариантах осуществления.
[0126] В независимом режиме, первое устройство 100-1 управления управляет первым приводом 10-1 согласно первой управляемой переменной C1, и второе устройство 100-2 управления управляет вторым приводом 10-2 согласно второй управляемой переменной C2. Даже когда первая управляемая переменная C1 становится ошибочным значением, второй привод 10-2, управляемый согласно корректной второй управляемой переменной C2, формирует корректную силу. Даже когда первый привод 10-1 пытается перемещать элемент 20 с ошибочной силой, второй привод 10-2 перемещает элемент 20 с корректной силой одновременно. А именно, нормальный второй привод 10-2 функционирует с возможностью компенсировать ошибочный вывод первого привода 10-1. Таким образом, влияние ошибочного вывода привода 10 на элемент 20 ограничивается (ослабляется).
[0127] В этом варианте осуществления, число рабочих приводов отличается между нормальным режимом и независимым режимом. Следовательно, после переключения из нормального режима в независимый режим, абсолютные величины первой управляемой переменной C1 и второй управляемой переменной C2 могут изменяться по мере необходимости.
[0128] В качестве одного примера, в дальнейшем рассматривается случай, в котором целевой крутящий момент привода 10 в целом определен. Каждая из первой управляемой переменной C1 и второй управляемой переменной C2 в нормальном режиме представляет собой целевой крутящий момент привода 10 в целом или величину (например, целевой ток), соответствующую целевому крутящему моменту. С другой стороны, каждая из первой управляемой переменной C1 и второй управляемой переменной C2 в независимом режиме составляет половину целевого крутящего момента привода 10 в целом или величины, соответствующей ему.
[0129] В качестве другого примера, в дальнейшем рассматривается случай, в котором управляемая переменная представляет собой целевой угол вращения привода 10 (электромотора). В этом случае, после переключения из нормального режима в независимый режим, абсолютные величины первой управляемой переменной C1 и второй управляемой переменной C2 не должны изменяться. Каждая из первой управляемой переменной C1 и второй управляемой переменной C2 представляет собой целевой угол вращения или величину, соответствующую целевому углу вращения.
4. Четвертый вариант осуществления
[0130] В четвертом варианте осуществления, в дальнейшем рассматривается применение изобретения к транспортному средству с технологией "руления по проводам". Описание, которое перекрывает описание проиллюстрированных вариантов осуществления, опускается надлежащим образом.
4-1. Конфигурация
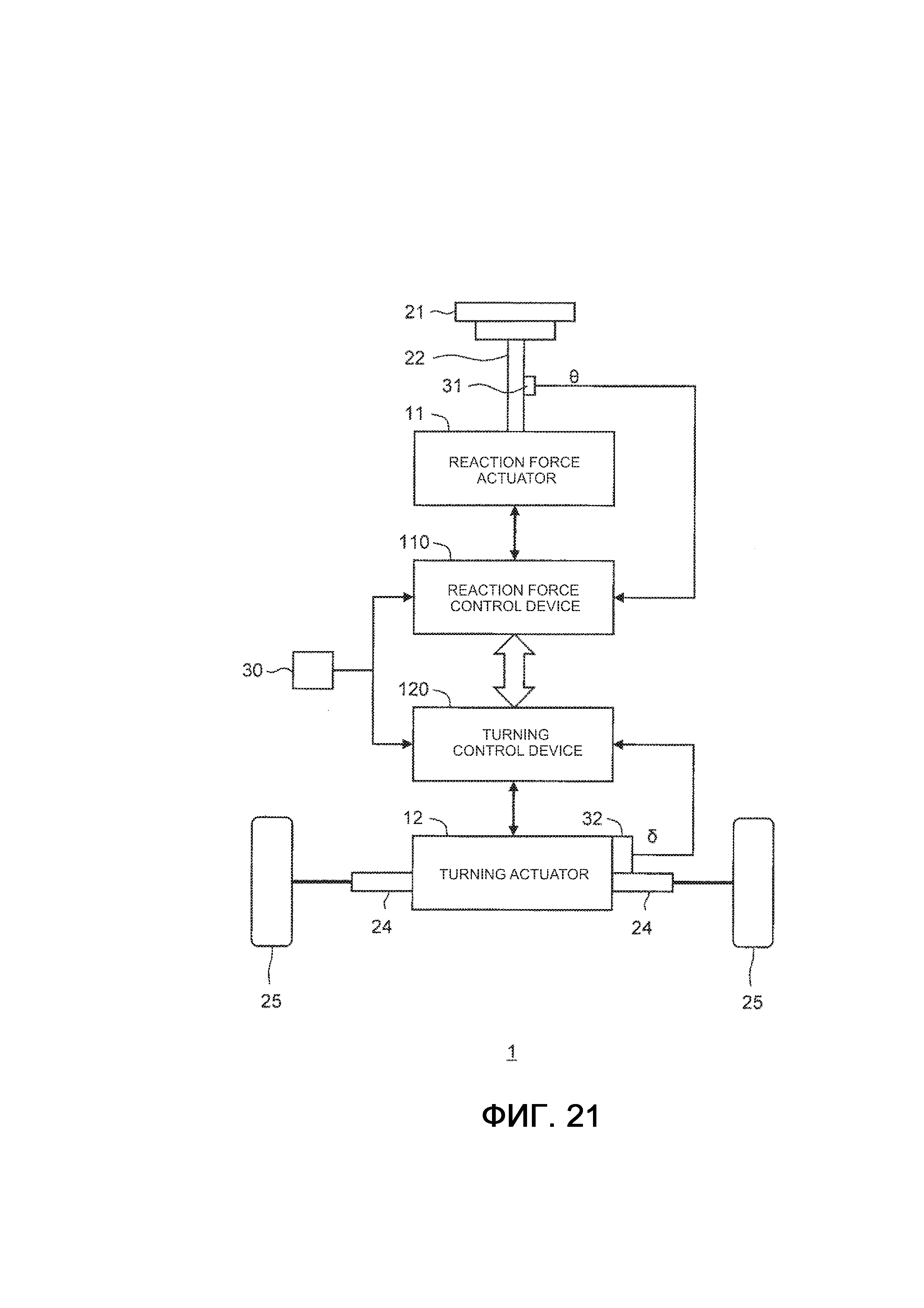
[0131] Фиг. 21 является блок-схемой, схематично показывающей конфигурацию системы 1 рулевого управления согласно четвертому варианту осуществления. Руль 21 представляет собой рабочий элемент, используемый водителем для руления. Рулевой вал 22 сцепляется с рулем 21 и вращается с рулем 21. Поворотные валы 24 сцепляются с колесами 25. Руль 21, рулевой вал 22, поворотные валы 24 и колеса 25 соответствуют элементу 20, связанному с рулением.
[0132] Руль 21 и колеса 25 механически отсоединяются друг от друга либо могут механически соединяться или отсоединяться друг от друга. В нижеприведенном описании, в дальнейшем рассматривается условие, в котором руль 21 и колеса 25 механически отсоединяются друг от друга.
[0133] Привод 11 для формирования силы реакции прикладывает крутящий момент к рулю 21. Например, привод 11 для формирования силы реакции включает в себя электромотор для формирования силы реакции. Ротор 8 электромотора для формирования силы реакции сцепляется с рулевым валом 22 через редуктор. Электромотор для формирования силы реакции выполнен с возможностью прикладывать крутящий момент к рулевому валу 22 и к рулю 21. Работа привода 11 для формирования силы реакции (электромотора для формирования силы реакции) управляется посредством устройства 110 управления силой реакции.
[0134] Поворотный привод 12 поворачивает колеса 25. Например, поворотный привод 12 включает в себя поворотный электромотор. Ротор 8 поворотного электромотора сцепляется с поворотными валами 24 через редукторы. По мере того, как поворотный электромотор вращается, его вращательное движение преобразуется в прямолинейное движение поворотных валов 24, за счет чего поворачиваются колеса 25. А именно, поворотный электромотор выполнен с возможностью поворачивать колеса 25. Работа поворотного привода 12 (поворотного электромотора) управляется посредством устройства 120 управления при повороте.
[0135] Датчик 30 включает в себя датчик 31 угла поворота при рулении и датчик 32 угла поворота.
[0136] Датчик 31 угла поворота при рулении определяет угол θ поворота при рулении руля 21. Датчик 31 угла поворота при рулении может представлять собой датчик угла вращения, который определяет угол вращения электромотора для формирования силы реакции. В этом случае, угол θ поворота при рулении вычисляется из угла вращения электромотора для формирования силы реакции. Датчик 31 угла поворота при рулении отправляет информацию угла θ поворота при рулении в устройство 110 управления силой реакции.
[0137] Датчик 32 угла поворота определяет угол δ поворота колес 25. Например, датчик 32 угла поворота вычисляет угол δ поворота из угла вращения поворотного электромотора. Датчик 32 угла поворота отправляет информацию, указывающую угол δ поворота, в устройство 120 управления при повороте.
[0138] Датчик 30 дополнительно может включать в себя датчик скорости транспортного средства, который определяет скорость транспортного средства, датчик угловой скорости относительно вертикальной оси, который определяет угловую скорость относительно вертикальной оси, датчик ускорения, который определяет ускорение, и т.д.
[0139] Устройство 110 управления силой реакции и устройство 120 управления при повороте соединяются между собой таким образом, что они могут обмениваться данными между собой и отправлять и принимать необходимую информацию между собой. Например, устройство 110 управления силой реакции отправляет информацию угла θ поворота при рулении руля 21 в устройство 120 управления при повороте. С другой стороны, устройство 120 управления при повороте отправляет информацию угла δ поворота колес 25 в устройство 110 управления силой реакции.
[0140] Устройство 120 управления при повороте выполняет "управление при повороте", чтобы поворачивать колеса 25, согласно операции руления с помощью руля 21 водителем. Более конкретно, устройство 120 управления при повороте управляет поворотным приводом 12, с тем чтобы поворачивать колеса 25 синхронно с углом θ поворота при рулении. Например, устройство 120 управления при повороте вычисляет целевой угол δt поворота, на основе угла θ поворота при рулении и скорости транспортного средства. Затем устройство 120 управления при повороте управляет работой поворотного привода 12, так что угол δ поворота колес 25 соответствует целевому углу δt поворота. В это время, устройство 120 управления при повороте определяет управляемую переменную C для управления поворотным приводом 12, на основе отклонения угла δ поворота относительно целевого угла δt поворота. Поворотный привод 12 приводится в действие согласно управляемой переменной C и работает с возможностью поворачивать колеса 25.
[0141] Устройство 110 управления силой реакции выполняет "управление реактивным крутящим моментом", чтобы прикладывать реактивный крутящий момент к рулю 21, согласно операции руления с помощью руля 21 водителем. Более конкретно, устройство 110 управления силой реакции управляет приводом 11 для формирования силы реакции, с тем чтобы прикладывать реактивный крутящий момент к рулю 21. Реактивный крутящий момент моделирует силу реакции при рулении, считываемую водителем в ходе операции руления. Например, устройство 110 управления силой реакции вычисляет целевой реактивный крутящий момент (пружинный компонент), соответствующий самосовмещающемуся крутящему моменту, прикладываемому к колесам 25, на основе угла θ поворота при рулении и скорости транспортного средства. Целевой реактивный крутящий момент дополнительно может включать в себя демпфирующий компонент, соответствующий скорости руления (dθ/dt). Устройство 110 управления силой реакции управляет работой привода 11 для формирования силы реакции таким образом, чтобы формировать целевой реактивный крутящий момент. В это время, устройство 110 управления силой реакции определяет управляемую переменную C для управления приводом 11 для формирования силы реакции, на основе целевого реактивного крутящего момента. Привод 11 для формирования силы реакции приводится в действие согласно управляемой переменной C и работает с возможностью формировать реактивный крутящий момент.
4-2. Дуплексная конфигурация
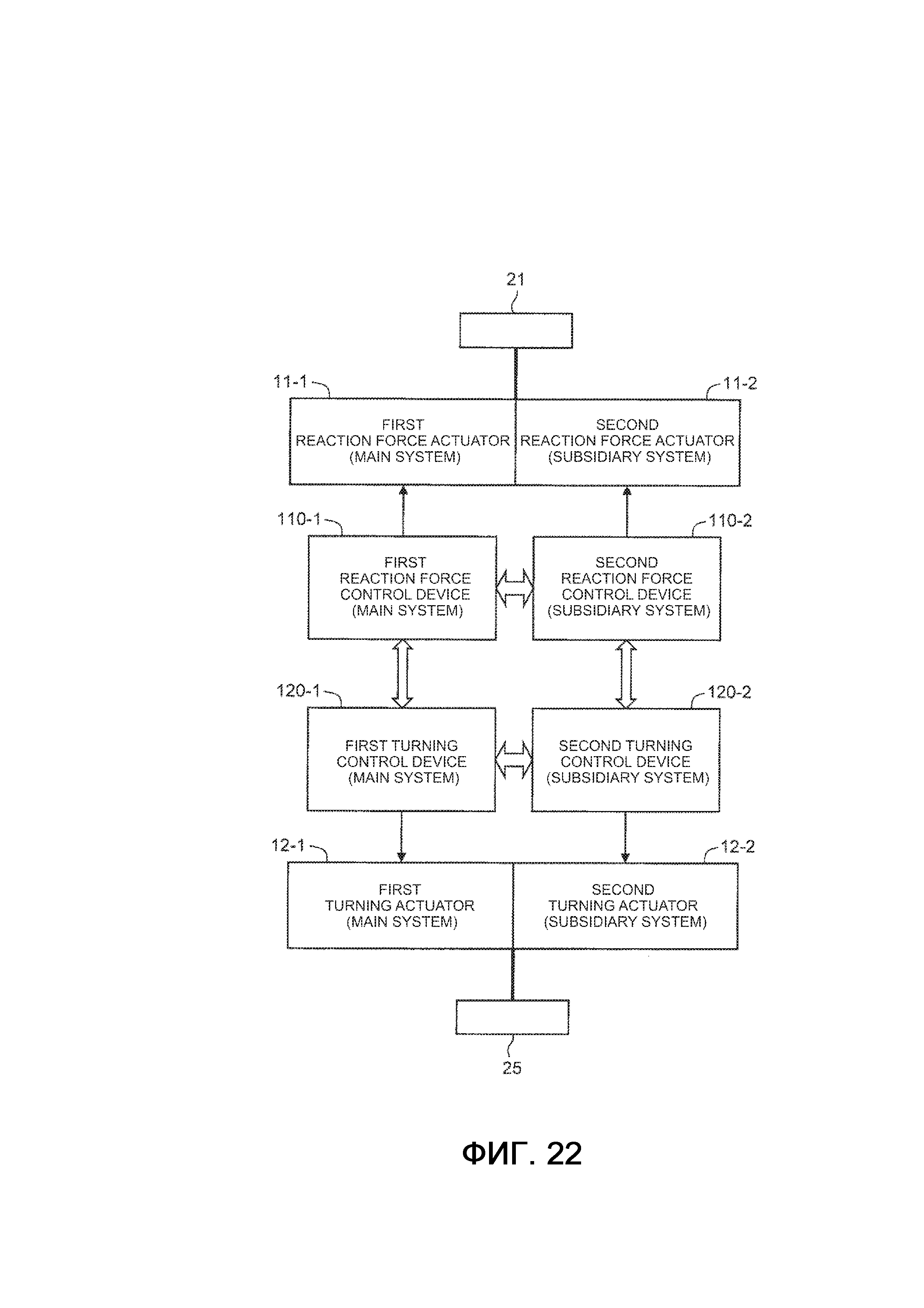
[0142] Устройство 100 управления, имеющее дуплексную конфигурацию, описанную в проиллюстрированных вариантах осуществления, используется в качестве, по меньшей мере, одного из устройства 110 управления силой реакции и устройства 120 управления при повороте.
[0143] Когда устройство 110 управления силой реакции представляет собой устройство 100 управления, имеющее дуплексную конфигурацию, привод 11 для формирования силы реакции соответствует приводу 10, имеющему дуплексную конфигурацию, и руль 21 и рулевой вал 22 соответствуют элементу 20.
[0144] Когда устройство 120 управления при повороте представляет собой устройство 100 управления, имеющее дуплексную конфигурацию, поворотный привод 12 соответствует приводу 10, имеющему дуплексную конфигурацию, и колеса 25 и поворотные валы 24 соответствуют элементу 20.
[0145] Фиг. 22 является блок-схемой, показывающей пример дуплексной конфигурации системы 1 рулевого управления согласно этому варианту осуществления. В примере, показанном на фиг. 22, устройство 100 управления, имеющее дуплексную конфигурацию, используется в качестве как устройства 110 управления силой реакции, так и устройства 120 управления при повороте.
[0146] Более конкретно, устройство 110 управления силой реакции включает в себя первое устройство 110-1 управления силой реакции главной системы и второе устройство 110-2 управления силой реакции вспомогательной системы. Привод 11 для формирования силы реакции включает в себя первый привод 11-1 для формирования силы реакции главной системы и второй привод 11-2 для формирования силы реакции вспомогательной системы. Первое устройство 110-1 управления силой реакции главной системы управляет первым приводом 11-1 для формирования силы реакции главной системы. Второе устройство 110-2 управления силой реакции вспомогательной системы управляет вторым приводом 11-2 для формирования силы реакции вспомогательной системы.
[0147] Кроме того, устройство 120 управления при повороте включает в себя первое устройство 120-1 управления при повороте главной системы и второе устройство 120-2 управления при повороте вспомогательной системы. Поворотный привод 12 включает в себя первый поворотный привод 12-1 главной системы и второй поворотный привод 12-2 вспомогательной системы. Первое устройство 120-1 управления при повороте главной системы управляет первым поворотным приводом 12-1 главной системы. Второе устройство 120-2 управления при повороте вспомогательной системы управляет вторым поворотным приводом 12-2 вспомогательной системы.
[0148] Дополнительно, первое устройство 110-1 управления силой реакции главной системы и первое устройство 120-1 управления при повороте главной системы могут обмениваться данными между собой. Аналогично, второе устройство 110-2 управления силой реакции вспомогательной системы и второе устройство 120-2 управления при повороте вспомогательной системы могут обмениваться данными между собой.
[0149] В качестве одного примера, в дальнейшем рассматривается случай, в котором анормальность возникает в первом устройстве 110-1 управления силой реакции, и второе устройство 110-2 управления силой реакции обнаруживает знак анормальности. В этом случае, устройство 100-A управления обнаружением представляет собой второе устройство 110-2 управления силой реакции. Уведомляемое устройство 100-B управления включает в себя не только первое устройство 110-1 управления силой реакции, но также и первое устройство 120-1 управления при повороте и второе устройство 120-2 управления при повороте. Второе устройство 110-2 управления силой реакции информирует в отношении переключения из нормального режима независимый режим все из первого устройства 110-1 управления силой реакции, первого устройства 120-1 управления при повороте и второго устройства 120-2 управления при повороте. Уведомление относительно переключения, например, передается в первое устройство 120-1 управления при повороте, через второе устройство 120-2 управления при повороте. Каждое из первого устройства 110-1 управления силой реакции, первого устройства 120-1 управления при повороте и второго устройства 120-2 управления при повороте переключает рабочий режим из нормального режима в независимый режим, в ответ на уведомление относительно переключения.
4-3. Преимущество
[0150] Согласно этому варианту осуществления, преимущества, аналогичные преимуществам, полученным в проиллюстрированных вариантах осуществления, получаются в транспортном средстве с технологией "руления по проводам".
[0151] Когда устройство 100 управления используется в качестве устройства 110 управления силой реакции, ошибочное управление реактивным крутящим моментом быстро ограничивается. Таким образом, водитель с меньшей вероятностью или с очень небольшой вероятностью должен испытывать странное или некомфортное ощущение в отношении реактивного крутящего момента. Кроме того, руль 21 с меньшей вероятностью или с очень небольшой вероятностью должен неожиданно рулиться, независимо от намерения водителя, вследствие ошибочной силы реакции. Поскольку руль 21 с меньшей вероятностью или с очень небольшой вероятностью должен неожиданно рулиться, колеса 25 также с меньшей вероятностью или с очень небольшой вероятностью должны неожиданно поворачиваться. А именно, транспортное средство с меньшей вероятностью или с очень небольшой вероятностью должно двигаться в ошибочном направлении. Это является предпочтительным с точки зрения стабильности и безопасности движения транспортного средства.
[0152] Кроме того, когда устройство 100 управления используется в качестве устройства 120 управления при повороте, ошибочное управление при повороте быстро ограничивается. Таким образом, колеса 25 с меньшей вероятностью или с очень небольшой вероятностью должны поворачиваться неожиданно. А именно, транспортное средство с меньшей вероятностью или с очень небольшой вероятностью должно двигаться в ошибочном направлении. Это является предпочтительным с точки зрения стабильности и безопасности движения транспортного средства.
[0153] В случае транспортного средства с технологией "руления по проводам", руль 21 механически отсоединяется от колес 25; в силу этого водитель замечает с меньшей вероятностью то, что направление колес 25 является неправильным. Когда коррекция направления водителем задерживается, отклонение направления движения транспортного средства становится большим. Соответственно, особенно важно использовать устройство 100 управления, имеющее дуплексную конфигурацию, в транспортном средстве с технологией "руления по проводам".
5. Пятый вариант осуществления
[0154] В пятом варианте осуществления, в дальнейшем рассматривается применение изобретения к системе 1 рулевого управления, включающей в себя EPS (электроусилитель руля). Описание, которое перекрывает описание проиллюстрированных вариантов осуществления, опускается надлежащим образом.
5-1. Конфигурация
[0155] Фиг. 23 является блок-схемой, схематично показывающей конфигурацию системы 1 рулевого управления согласно пятому варианту осуществления. Один конец рулевого вала 22 сцепляется с рулем 21, и другой конец сцепляется с рулевым редуктором 23. Рулевой редуктор 23 включает в себя, например, зубчатую рейку и сателлит. Вращательное движение руля 21 преобразуется в прямолинейное движение поворотных валов 24 через рулевой вал 22 и рулевой редуктор 23, и колеса 25 поворачиваются посредством использования прямолинейного движения.
[0156] EPS-привод 13 помогает при повороте колес 25. Например, EPS-привод 13 включает в себя EPS-электромотор. Ротор 8 EPS-электромотора сцепляется с поворотными валами 24 через редукторы. По мере того, как EPS-электромотор вращается, его вращательное движение преобразуется в прямолинейное движение поворотных валов 24, за счет чего поворачиваются колеса 25. А именно, EPS-электромотор выполнен с возможностью поворачивать колеса 25. Работа EPS-привода 13 (EPS-электромотора) управляется посредством устройства 130 EPS-управления.
[0157] Датчик 30 включает в себя датчик 33 крутящего момента поворота при рулении, в дополнение к датчику 31 угла поворота при рулении и датчику 32 угла поворота. Датчик 33 крутящего момента поворота при рулении определяет крутящий момент T поворота при рулении, прикладываемый к рулевому валу 22. Датчик 33 крутящего момента поворота при рулении выводит информацию, указывающую крутящий момент T поворота при рулении, в устройство 130 EPS-управления.
[0158] Устройство 130 EPS-управления выполняет "управление помощью" для уменьшения нагрузки по рулению, когда водитель выполняет операцию руления. Согласно управлению помощью, устройство 130 EPS-управления управляет EPS-приводом 13 таким образом, чтобы помогать повороту колес 25. Например, устройство 130 EPS-управления вычисляет целевой вспомогательный крутящий момент на основе крутящего момента T поворота при рулении и скорости транспортного средства. Типично, целевой вспомогательный крутящий момент увеличивается по мере того, как крутящий момент T поворота при рулении увеличивается. Затем устройство 130 EPS-управления управляет работой EPS-привода 13 таким образом, чтобы формировать целевой вспомогательный крутящий момент. В это время, устройство 130 EPS-управления определяет управляемую переменную C для управления EPS-приводом 13, на основе целевого вспомогательного крутящего момента. EPS-привод 13 приводится в действие согласно управляемой переменной C и работает с возможностью формировать вспомогательный крутящий момент. Помощь при повороте колес 25 осуществляться за счет вспомогательного крутящего момента, и нагрузка по рулению на водителя уменьшается.
5-2. Дуплексная конфигурация
[0159] Устройство 100 управления, имеющее дуплексную конфигурацию, как описано выше в проиллюстрированных вариантах осуществления, используется в качестве устройства 130 EPS-управления. EPS-привод 13 соответствует приводу 10, имеющему дуплексную конфигурацию, и колеса 25 и поворотные валы 24 соответствуют элементу 20.
[0160] Согласно этому варианту осуществления, преимущества, аналогичные преимуществам проиллюстрированных вариантов осуществления, получаются относительно управления помощью. Таким образом, поскольку ошибочное управление помощью ограничивается, чрезмерный вспомогательный крутящий момент должен формироваться с меньшей вероятностью или с очень небольшой вероятностью. Следовательно, водитель с меньшей вероятностью или с очень небольшой вероятностью должен испытывать странное или некомфортное ощущение в отношении управления помощью.
Реферат
Изобретение относится к области транспортного машиностроения. Система рулевого управления содержит привод и устройство управления, выполненное с возможностью управления приводом. Привод имеет дуплексную конфигурацию, включающую привод главной системы и привод вспомогательной системы. Устройство управления имеет дуплексную конфигурацию, содержащую первое устройство управления, которое принадлежит главной системе, и второе устройство управления, которое принадлежит вспомогательной системе, и имеет рабочие режимы и независимый режим. Устройства управления выполнены с возможностью вычисления идентичной управляемой переменной. Устройства управления выполнены с возможностью обмена данными между собой. Достигается улучшение управления транспортным средством. 7 з.п. ф-лы, 23 ил.
Формула
Документы, цитированные в отчёте о поиске
Интегрированная система управления транспортным средством
Устройство управления рулением и способ управления рулением
Комментарии