Устройство управления рулением и способ управления рулением - RU2633023C2
Код документа: RU2633023C2
Чертежи
Описание
Область техники, к которой относится изобретение
[0001] Данное раскрытие относится к устройству управления рулением и к способу управления рулением.
Уровень техники
[0002] PTL1 описывает технологию снижения числа оборотов в состоянии холостого хода в качестве меры противодействия выбросам выхлопных газов либо для повышения эффективности использования топлива, которая останавливает двигатель автоматически, когда транспортное средство останавливается, и двигатель находится в состоянии холостого хода, и повторно запускает двигатель, когда транспортное средство начинает движение.
Список библиографических ссылок
Патентные документы
[0003] PTL 1. JP 2001-173476 A
Сущность изобретения
Техническая задача
[0004] Система руления по проводам потребляет электроэнергию при повороте колес с помощью поворотного электромотора и при формировании силы реакции при рулении с помощью электромотора для формирования силы реакции. Тем не менее, генератор переменного тока останавливается в режиме снижения числа оборотов в состоянии холостого хода, к примеру, в вышеуказанном предшествующем уровне техники, и в силу этого ограничивается доступная электроэнергия для обычного транспортного средства с двигателем, отличного от гибридного транспортного средства. Следовательно, когда руление по проводам обычно выполняется в режиме снижения числа оборотов в состоянии холостого хода, напряжение аккумулятора может падать, и может оказываться влияние на другую электрическую систему.
Одна цель варианта осуществления настоящего изобретения заключается в том, чтобы подавлять падение напряжения аккумулятора в режиме снижения числа оборотов в состоянии холостого хода.
Решение задачи
[0005] Согласно аспекту настоящего раскрытия, предусмотрено устройство управления рулением, используемое в транспортном средстве, причем транспортное средство останавливает двигатель, когда предварительно определенное условие удовлетворяется, и повторно запускает двигатель, когда транспортное средство начинает движение. Далее, муфта обеспечивается между механизмом рулевого управления, который управляется водителем для руления, и поворотным механизмом, выполненным с возможностью поворачивать колесо, причем муфта выполнена с возможностью сцепления и расцепления механизма рулевого управления и поворотного механизма. Далее, предусмотрен поворотный актуатор, выполненный с возможностью обеспечения крутящего момента поворота поворотному механизму в зависимости от величины руления водителем. Муфта расцепляется, и выполняется управление приведением в действие поворотного актуатора. Когда двигатель остановлен, поддерживается расцепленное состояние муфты, и ограничивается крутящий момент приведения в движение поворотного актуатора.
Краткое описание чертежей
[0007] Фиг. 1 является схемой принципиальной конфигурации устройства рулевого управления;
Фиг. 2 является схемой принципиальной конфигурации системы снижения числа оборотов в состоянии холостого хода;
Фиг. 3 является блок-схемой, иллюстрирующей полную конфигурацию обработки управления рулением по проводам;
Фиг. 4 является блок-схемой последовательности операций способа, иллюстрирующей обработку управления IS-переключением;
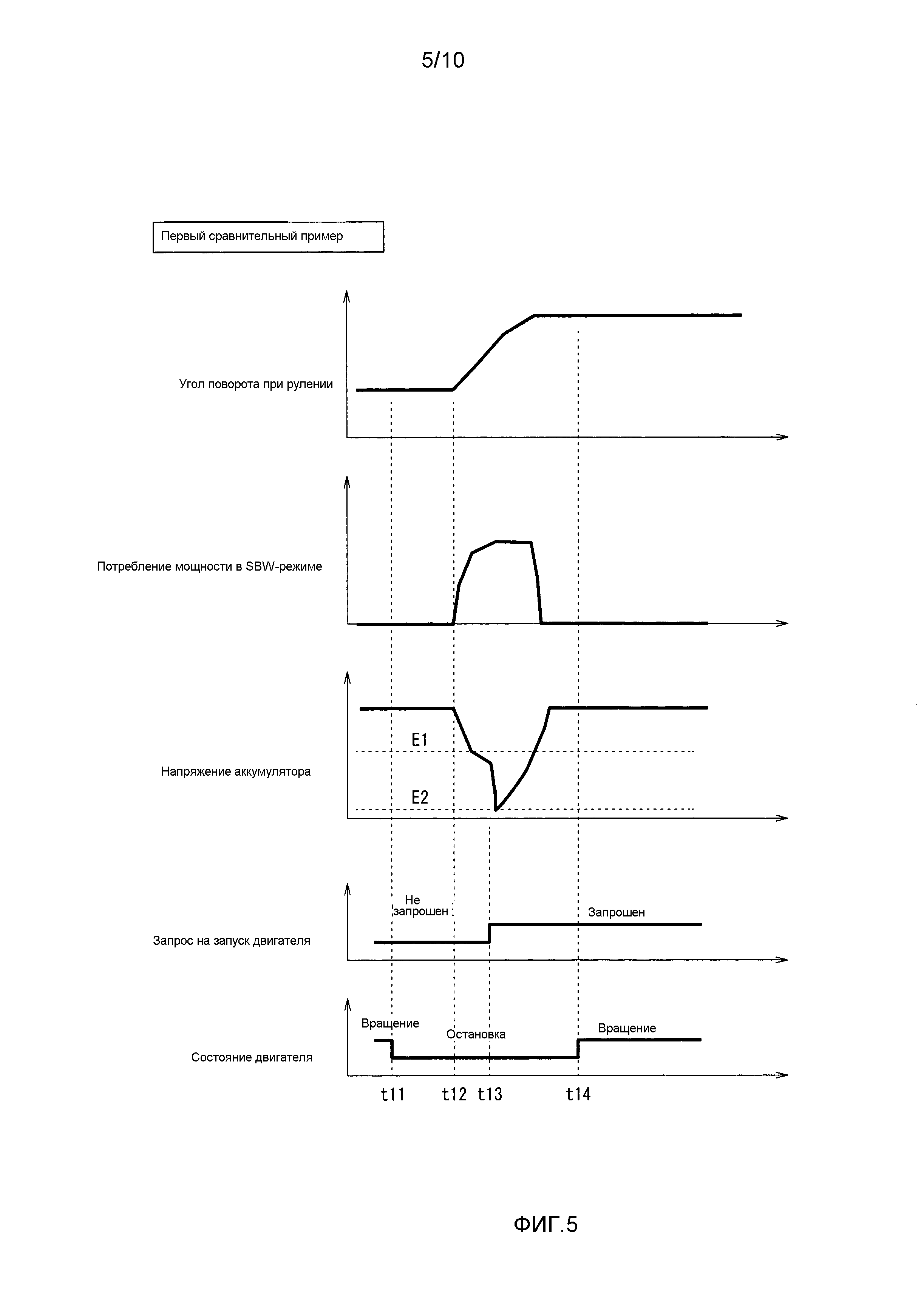
Фиг. 5 является временной диаграммой, иллюстрирующей первый сравнительный пример;
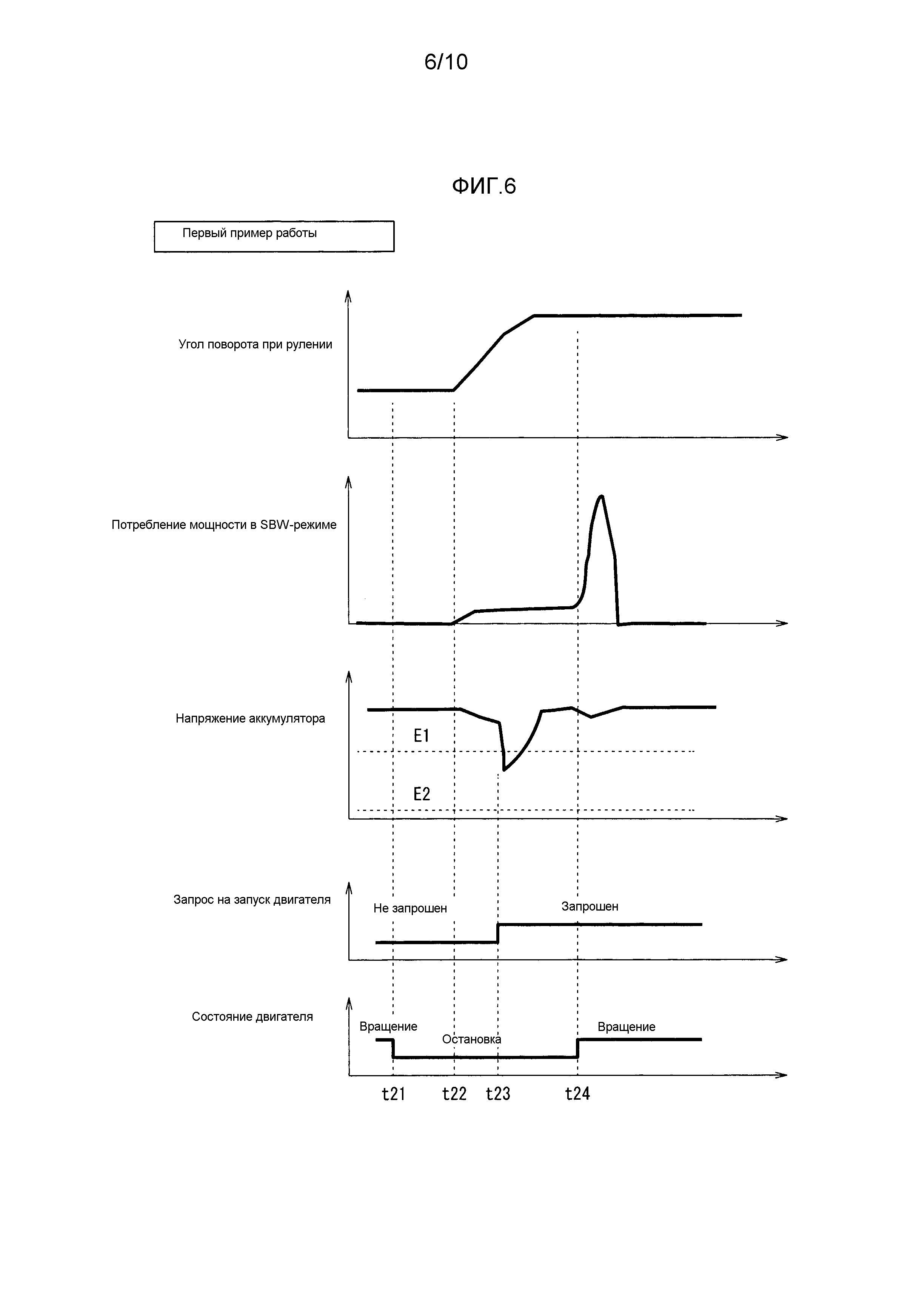
Фиг. 6 является временной диаграммой, иллюстрирующей первый пример работы;
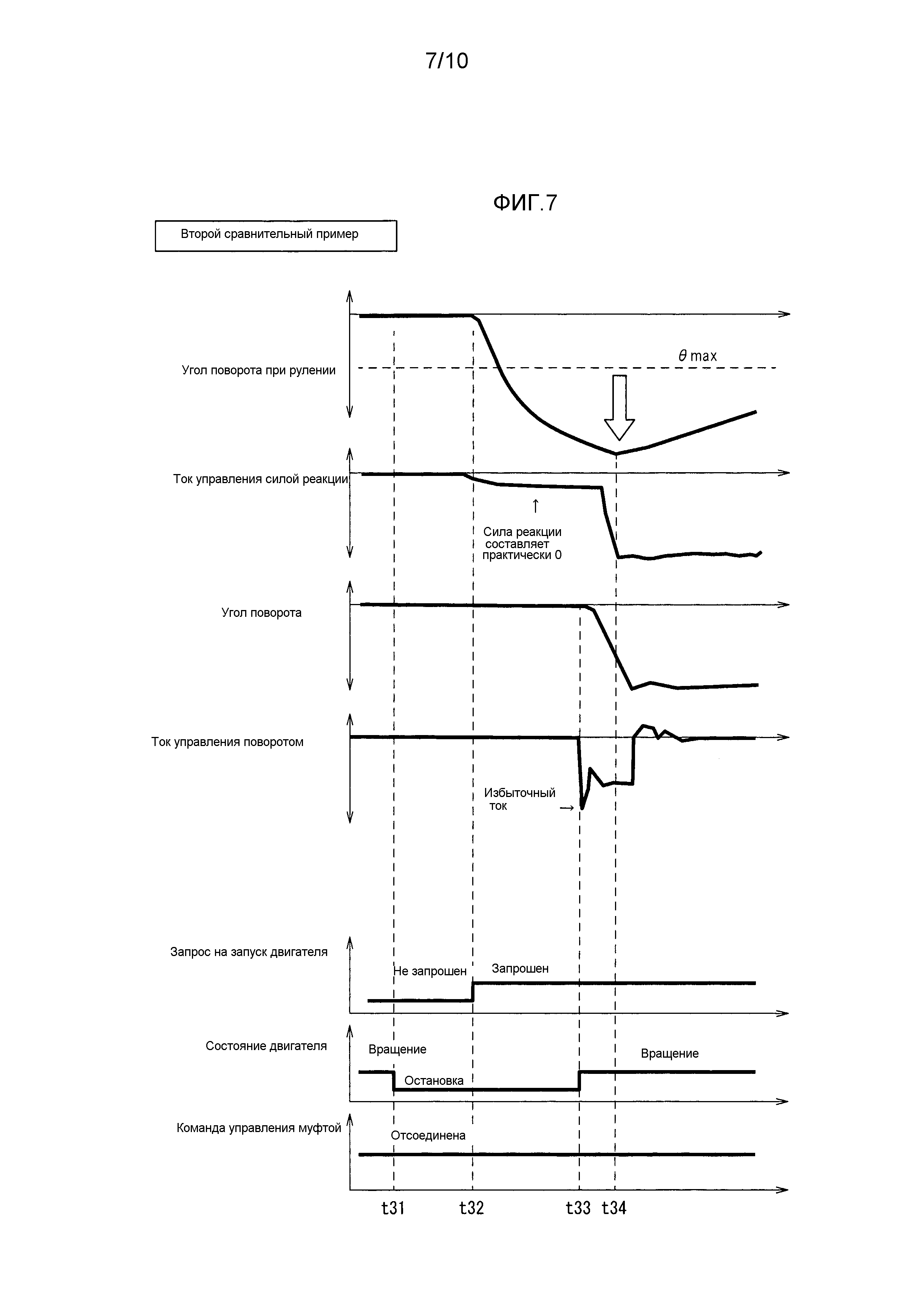
Фиг. 7 является временной диаграммой, иллюстрирующей второй сравнительный пример;
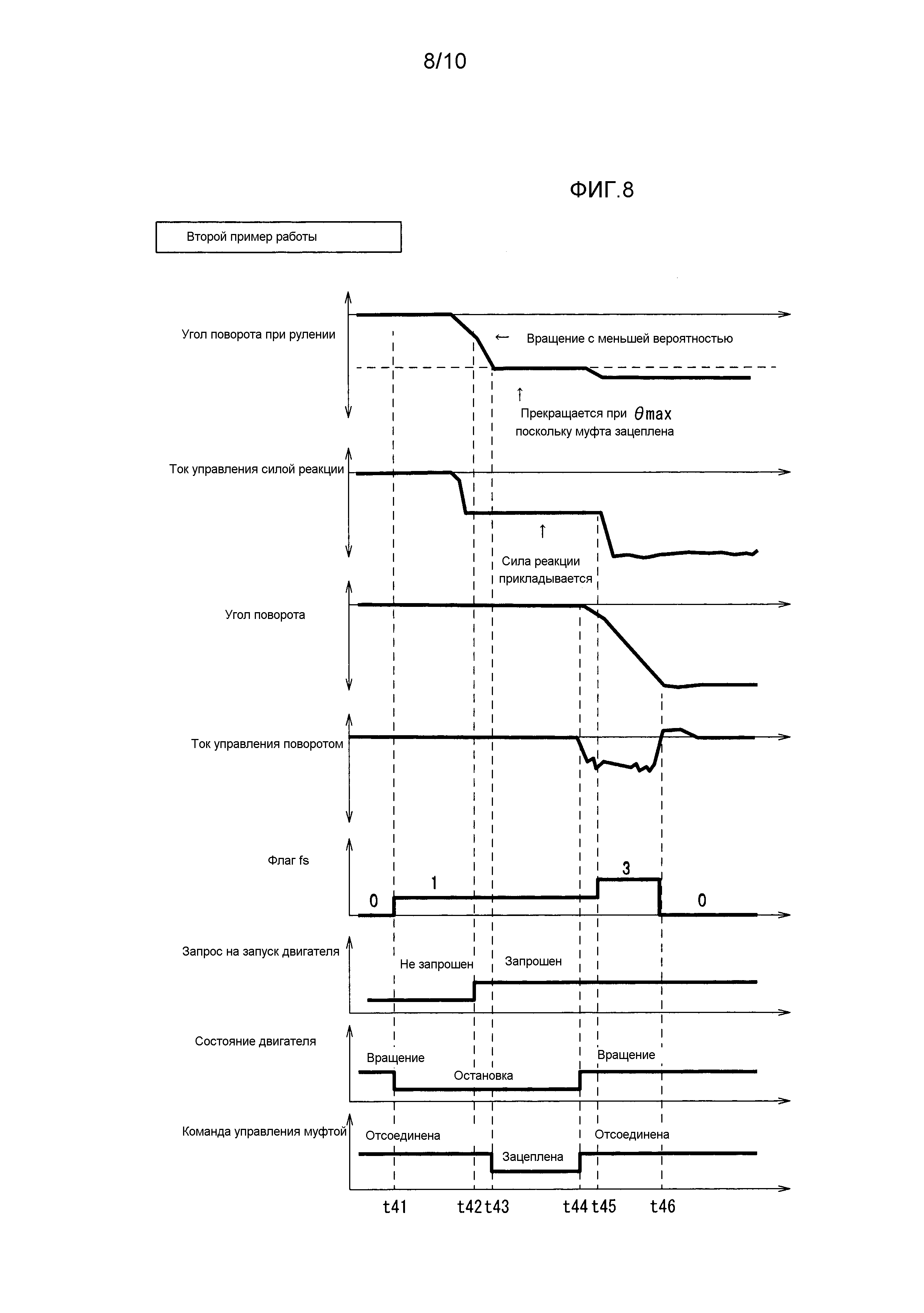
Фиг. 8 является временной диаграммой, иллюстрирующей второй пример работы;
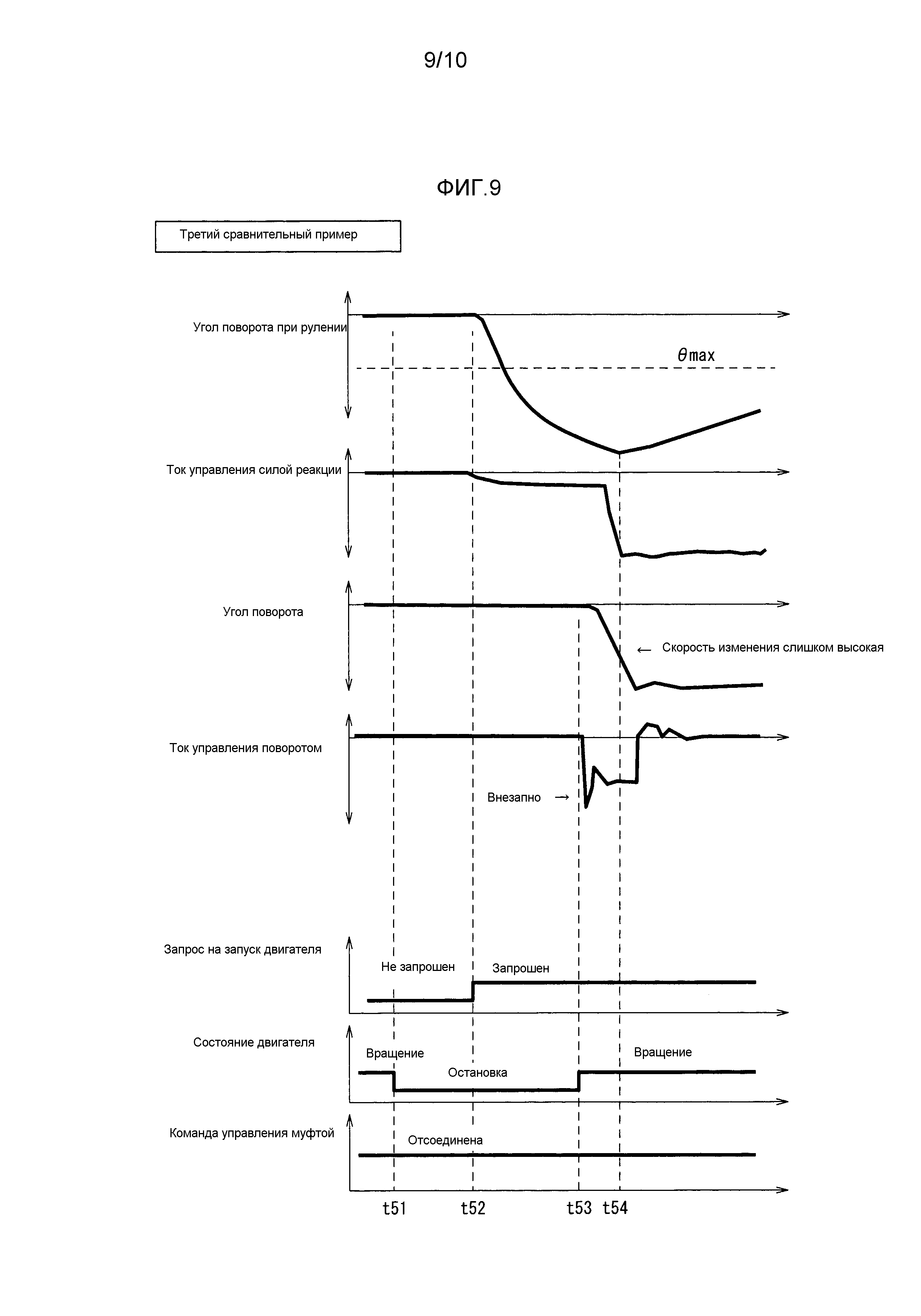
Фиг. 9 является временной диаграммой, иллюстрирующей третий сравнительный пример; и
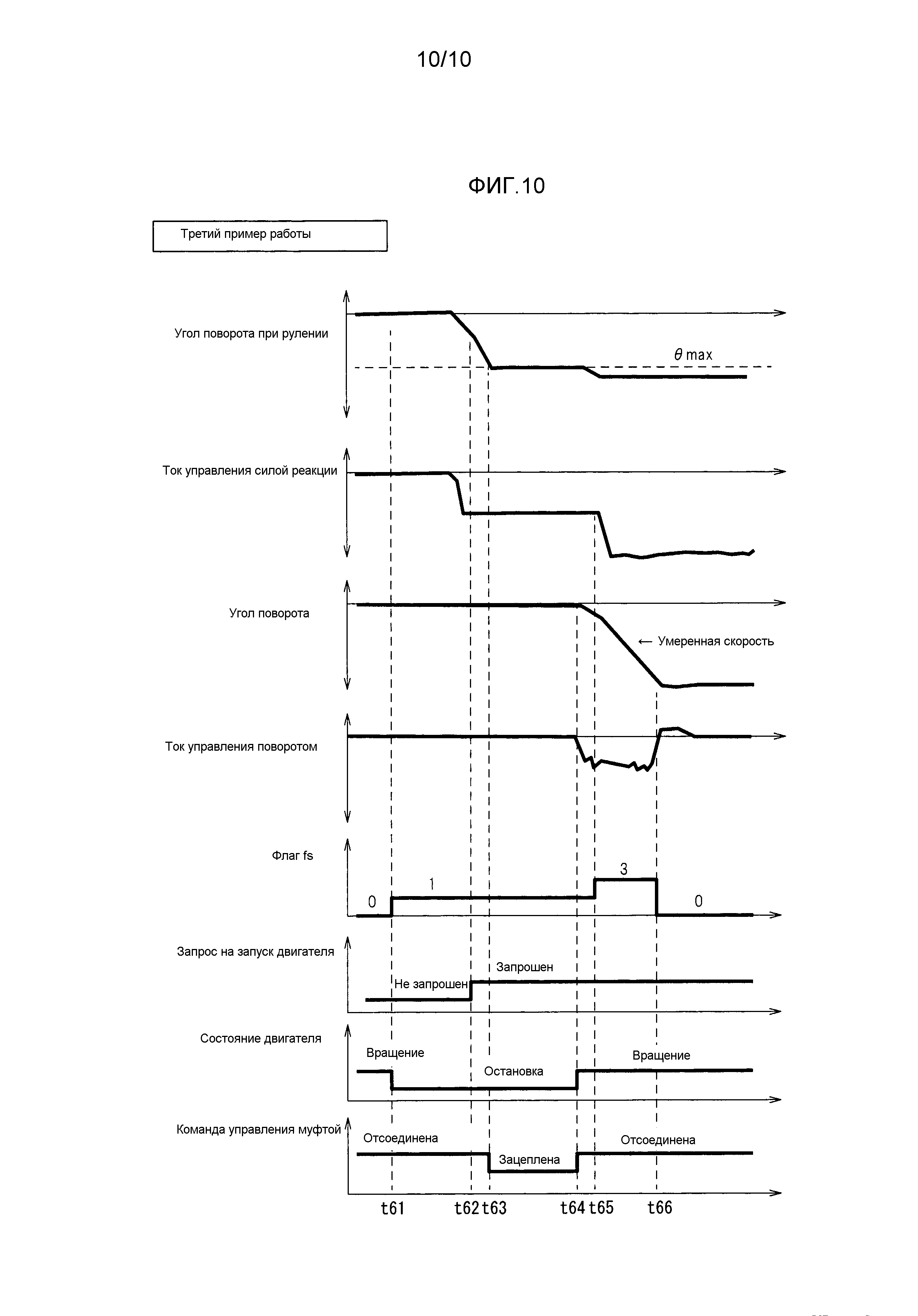
Фиг. 10 является временной диаграммой, иллюстрирующей третий пример работы.
Подробное описание вариантов осуществления
[0008] Далее описываются варианты осуществления настоящего раскрытия со ссылками на чертежи.
Первый вариант осуществления
Конфигурация
Сначала описывается конфигурация руления по проводам.
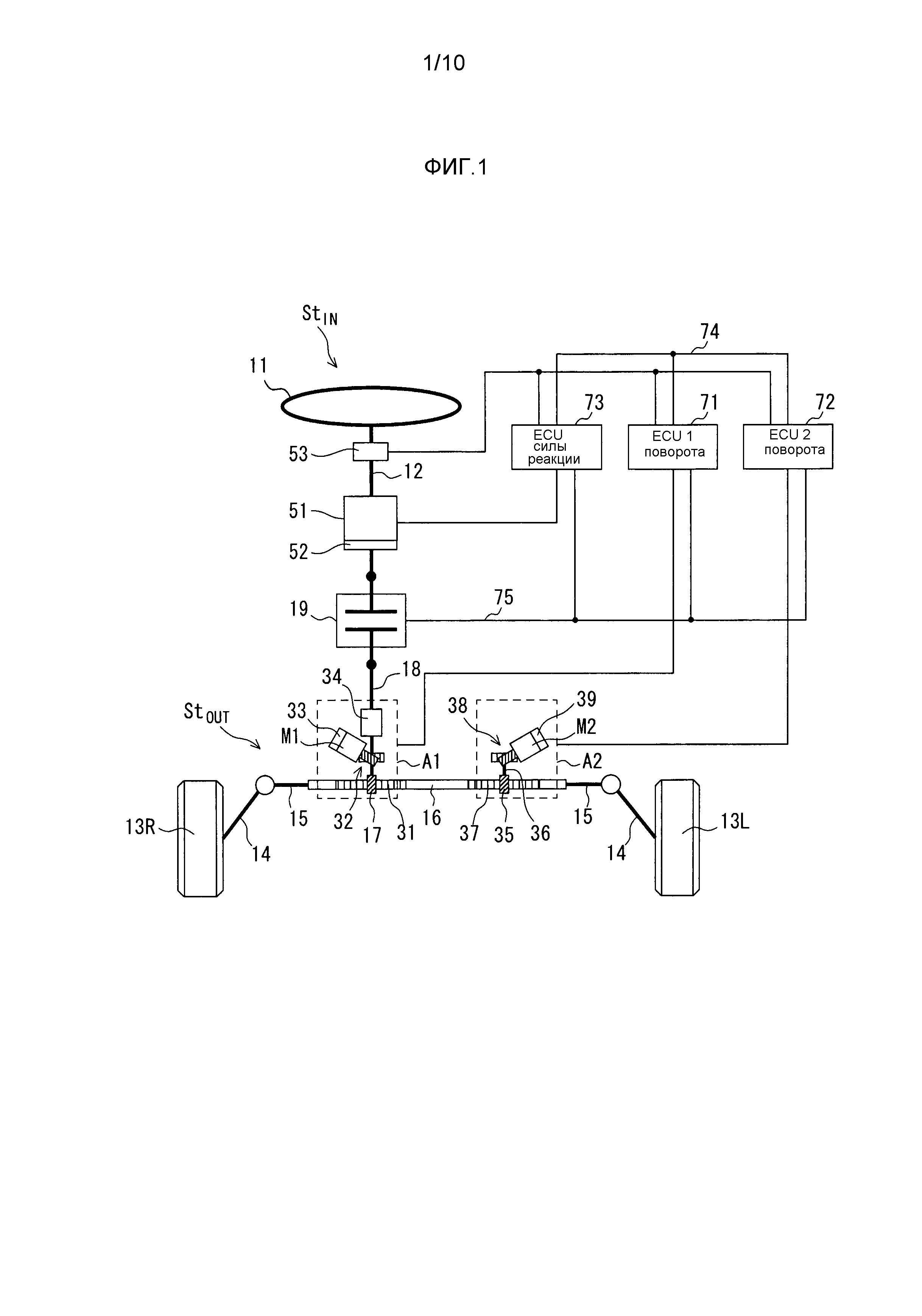
Фиг. 1 является схемой принципиальной конфигурации устройства рулевого управления.
Руль 11 соединяется с рулевым валом 12. Колеса 13L и 13R (поворотные колеса) соединяются с валом 18 первой шестерни через рычаги 14 поворотных кулаков, поперечные рулевые тяги 15, вал 16 зубчатой рейки и ведущую шестерню 17, в этом порядке. Рулевой вал 12 и вал 18 первой шестерни соединяются между собой через муфту 19 переключаемым способом таким образом, что они могут соединяться и разъединяться между собой.
В этой конфигурации руль 11 и рулевой вал 12, которые расположены на стороне входного вала муфты 19, представляют собой входной рулевой механизм StIN, в котором рулевой вал 12 вращается посредством операции руления водителем. Кроме того, рычаги 14 поворотных кулаков, поперечные рулевые тяги 15, вал 16 зубчатой рейки, ведущая шестерня 17 и вал 18 первой шестерни предусмотрены на стороне выходного вала муфты 19, представляют собой выходной поворотный механизм StOUT, выполненный с возможностью поворачивать колеса 13L и 13R посредством вращения вала 18 первой шестерни.
[0009] Следовательно, в состоянии, в котором муфта 19 соединена (зацеплена) при вращении руля 11, вращаются рулевой вал 12, муфта 19 и вал 18 первой шестерни. Вращательное движение вала 18 первой шестерни преобразуется в возвратно-поступательное перемещение поперечных рулевых тяг 15 посредством вала 16 зубчатой рейки и ведущей шестерни 17, возвратно-поступательное перемещение поворачивает колеса 13L и 13R через рычаги 14 поворотных кулаков.
Муфта 19 включает в себя электромагнитную муфту с зацеплением без возбуждения. Иными словами, когда не возбуждена катушка индуктивности, ролик зацепляется между кулачковой поверхностью входного вала и внешним кольцом выходного вала, например, посредством кулачкового роликового механизма для того, чтобы зацеплять входной вал с выходным валом. С другой стороны, когда возбуждена катушка индуктивности, зацепление ролика между кулачковой поверхностью входного вала и внешним кольцом выходного вала прекращается посредством притяжения якоря. Входной вал и выходной вал разъединяются.
[0010] Вал 16 зубчатой рейки идет в поперечном направлении кузова транспортного средства (в направлении ширины транспортного средства), и шестерня 31 зубчатой рейки (зубья) формируется на одной стороне вала зубчатой рейки (в этом примере, на правой стороне кузова транспортного средства). Ведущая шестерня 17 зацепляет шестерню 31 зубчатой рейки. Состояние зацепления шестерни 31 зубчатой рейки и ведущей шестерни 17 регулируется посредством механизма держателя.
Вал 18 первой шестерни включает в себя входной вал на стороне муфты и выходной вал на стороне ведущей шестерни. Выходной вал соединяется с первым поворотным электромотором M1, например, через червячную шестерню 32. Круговой датчик 33 позиции, определяющий угол поворота электромотора, обеспечивается на первом поворотном электромоторе M1.
[0011] Червячная шестерня 32 включает в себя червячное колесо, соединенное с валом 18 первой шестерни, и червяк, соединенный с первым поворотным электромотором M1. Червячный вал пересекает под углом вал червячного колеса. Это служит для уменьшения размера модуля в перпендикулярном направлении к валу 18 первой шестерни.
В червячной шестерне 32 угол кручения червяка задается больше угла естественного откоса (угла трения), так что червячное колесо может вращаться посредством вращения червяка, и червяк может вращаться посредством вращения червячного колеса, т.е. может приводиться в движение в обратном направлении.
[0012] Датчик 34 крутящего момента обеспечивается между входным валом и выходным валом на валу 18 первой шестерни.
Ведущая шестерня 17, выходной вал вала 18 первой шестерни, червячная шестерня 32, первый поворотный электромотор M1, круговой датчик 34 позиции и датчик 34 крутящего момента сконфигурированы как интегрированный составной компонент (сборочный узел). Он упоминается как первый актуатор A1. Первый актуатор A1 используется, в общем, в качестве компонентов устройства электрического усилителя рулевого управления.
Согласно первому актуатору A1, когда первый поворотный электромотор M1 приводится в действие в состоянии, в котором муфта 19 разъединена, вал 18 первой шестерни вращается через червячную шестерню 32. Следовательно, угол поворота колес 13L и 13R изменяется в зависимости от угла поворота первого поворотного электромотора M1. Следовательно, посредством управления приведением в действие первого поворотного электромотора M1 в зависимости от операции руления водителем, когда муфта 19 разъединена, достигаются намеченные характеристики управления рулением в качестве функции руления по проводам.
[0013] Кроме того, когда первый поворотный электромотор M1 приводится в действие в состоянии, в котором муфта 19 соединена, крутящий момент электромотора передается на вал 18 первой шестерни через червячную шестерню 32. Следовательно, посредством управления приведением в действие первого поворотного электромотора M1 в зависимости от операции руления водителем, когда муфта 19 соединена, достигаются намеченные характеристики усиления, уменьшающие рабочую нагрузку на водителя.
Вал 36 второй шестерни соединяется с другой стороной вала 16 зубчатой рейки (в этом примере, с левой стороной кузова транспортного средства) через ведущую шестерню 35. Иными словами, шестерня 37 зубчатой рейки (зубья) формируется с другой стороны вала 16 зубчатой рейки (в этом примере, с левой стороной кузова транспортного средства). Ведущая шестерня 35 зацепляет шестерню 37 зубчатой рейки. Состояние зацепления шестерни 37 зубчатой рейки и ведущей шестерни 35 регулируется посредством механизма держателя.
[0014] Второй поворотный электромотор M2 соединяется с валом 36 второй шестерни, например, через червячную шестерню 38. Второй поворотный электромотор M2 представляет собой идентичный тип электромотора с первым поворотным электромотором M1. Круговой датчик 39 позиции, определяющий угол поворота электромотора, обеспечивается на втором поворотном электромоторе M2.
Червячная шестерня 38 включает в себя червячное колесо, соединенное с валом 36 второй шестерни, и червяк, соединенный со вторым поворотным электромотором M2. Червячный вал пересекает под углом вал червячного колеса. Это служит для уменьшения размера модуля в перпендикулярном направлении к валу 36 второй шестерни.
В червячной шестерне 38 угол кручения червяка задается больше угла естественного откоса (угла трения), так что червячное колесо может вращаться посредством вращения червяка, и червяк может вращаться посредством вращения червячного колеса, т.е. может приводиться в движение в обратном направлении.
Ведущая шестерня 35, выходной вал вала 36 второй шестерни, червячная шестерня 38, второй поворотный электромотор M2 и круговой датчик 39 позиции сконфигурированы как интегрированный составной компонент (сборочный узел). Он упоминается как второй актуатор A2.
[0015] Согласно второму актуатору A2, когда второй поворотный электромотор M2 приводится в действие в состоянии, в котором муфта 19 разъединена, вал 36 второй шестерни вращается через червячную шестерню 32. Следовательно, угол поворота колес 13L и 13R изменяется в зависимости от угла поворота второго поворотного электромотора M2. Следовательно, посредством управления приведением в действие второго поворотного электромотора M2 в зависимости от операции руления водителем, когда муфта 19 разъединена, достигаются намеченные характеристики управления рулением в качестве функции руления по проводам.
[0016] Электромотор 51 для формирования силы реакции соединяется с рулевым валом 12. Электромотор 51 для формирования силы реакции включает в себя ротор, вращающийся вместе с рулевым валом 12, и статор, который обращен к ротору и прикреплен к корпусу. Ротор формируется посредством размещения магнитов с равными интервалами в направлении вдоль окружности и посредством их прикрепления к сердечнику ротора, например, за счет формования со вставкой. Статор формируется посредством размещения железных сердечников, на которые наматываются катушки с равными интервалами в направлении вдоль окружности, и посредством их прикрепления к корпусу, например, посредством напряженной посадки. Круговой датчик 52 позиции, определяющий угол поворота электромотора, обеспечивается на электромоторе 51 для формирования силы реакции.
Датчик 53 угла поворота при рулении обеспечивается на рулевом валу 12.
Согласно электромотору 51 для формирования силы реакции, когда электромотор 51 для формирования силы реакции приводится в действие в состоянии, в котором муфта 19 разъединена, крутящий момент электромотора передается на рулевой вал 12. Следовательно, посредством управления приведением в действие электромотора 51 для формирования силы реакции в зависимости от силы реакции, принимаемой от поверхности дороги в то время, когда муфта 19 разъединена, чтобы выполнять руление по проводам, достигаются намеченные характеристики силы реакции, обеспечивающие рабочую силу реакции на операцию руления водителем.
Выше описана конфигурация устройства рулевого управления.
[0017] Далее описывается конфигурация системы управления.
Настоящий вариант осуществления включает в себя первый контроллер 71 поворота (ECU 1 поворота), второй контроллер 72 поворота (ECU 2 поворота) и контроллер 73 силы реакции (ECU силы реакции). Соответствующие контроллеры включают в себя, например, микрокомпьютеры.
Первый контроллер 71 поворота выполнен с возможностью принимать сигналы из кругового датчика 33 позиции, датчика 34 крутящего момента и датчика 53 угла поворота при рулении и управлять приведением в действие первого поворотного электромотора M1 через схему формирователя сигналов управления. Второй контроллер 72 поворота выполнен с возможностью принимать сигналы из кругового датчика 39 позиции и датчика 53 угла поворота при рулении и управлять приведением в действие второго поворотного электромотора M2 через схему формирователя сигналов управления. Контроллер 73 силы реакции выполнен с возможностью принимать сигналы из кругового датчика 52 позиции и датчика 53 угла поворота при рулении и управлять приведением в действие электромотора 52 для формирования силы реакции через схему формирователя сигналов управления.
[0018] Круговой датчик 33 позиции выполнен с возможностью обнаруживать угол θm1 поворота электромотора первого поворотного электромотора M1. Круговой датчик 33 позиции выполнен с возможностью выводить сигнал определения в зависимости от угла поворота ротора из катушки ротора, когда сигнал возбуждения вводится в обмотку статора. Первый контроллер 71 поворота выполнен с возможностью выводить сигнал возбуждения в обмотку статора и определять угол θm1 поворота электромотора для первого поворотного электромотора M1 на основе амплитудной модуляции сигнала определения, принимаемого из катушки ротора, посредством схемы обработки сигналов. Следует отметить, что первый контроллер 71 поворота выполнен с возможностью трактовать правый поворот в качестве положительного значения и трактовать левый поворот в качестве отрицательного значения.
Аналогично, угол θm2 поворота электромотора второго поворотного электромотора M2 определяется посредством второго контроллера 72 поворота через круговой датчик 39 позиции, и угол θr поворота электромотора 51 для формирования силы реакции определяется посредством контроллера 73 силы реакции через круговой датчик 52 позиции.
[0019] Датчик 34 крутящего момента выполнен с возможностью определять крутящий момент Ts, вводимый на вал 18 первой шестерни. Датчик 34 крутящего момента выполнен с возможностью определять угол кручения торсионного вала, размещенного между стороной входного вала и стороной выходного вала для вала 18 первой шестерни, например, с помощью устройства на эффекте Холла, и выводить в первый контроллер 71 поворота электрический сигнал, получаемый посредством преобразования изменения плотности магнитного потока, сформированной вследствие относительного углового смещения между многополюсным магнитом и вилкой. Первый контроллер 71 поворота выполнен с возможностью определять крутящий момент Ts на основе входного электрического сигнала. Следует отметить, что первый контроллер 71 поворота выполнен с возможностью трактовать руление вправо водителем в качестве положительного значения и трактовать руление влево в качестве отрицательного значения.
[0020] Датчик 53 угла поворота при рулении включает в себя кодовый датчик угла поворота, например, и выполнен с возможностью определять угол θs поворота при рулении рулевого вала 12. Датчик 53 угла поворота при рулении выполнен с возможностью определять, в то время как дискообразная измерительная шкала вращается вместе с рулевым валом 12, свет, проходящий через щель измерительной шкалы, с помощью двух фототранзисторов, и выводить в соответствующие контроллеры импульсный сигнал в ассоциации с вращением рулевого вала 12. Соответствующие контроллеры определяют угол θs поворота при рулении рулевого вала 12 на основе входного импульсного сигнала. Следует отметить, что соответствующие контроллеры выполнены с возможностью трактовать руление вправо в качестве положительного значения и трактовать руление влево в качестве отрицательного значения.
[0021] Следует отметить, что контроллеры соединяются между собой через линию 74 связи, чтобы допускать обмен данными друг с другом. Иными словами, создается тракт связи, приспосабливающий стандарт бортовой сети связи (бортовой LAN), такой как мультиплексная CSMA/CA-связь (CAN: контроллерная сеть), Flex Ray и т.п.
Соответствующие контроллеры соединяются с муфтой 19 через линию 75 связи. Линия 75 связи представляет собой тракт связи для вывода сигнала управления муфтой, допускающего переключение муфты 19 таким образом, что муфта зацепляется или расцепляется. Сигнал управления муфтой представляет собой сигнал для расцепления муфты 19. Когда соответствующие контроллеры выводят сигнал управления муфтой, муфта 19 расцепляется. Когда любой из контроллеров прекращает вывод сигнала управления муфтой, муфта 19 зацепляется.
Выше описана конфигурация системы управления.
[0022] Далее описываются режимы управления.
В одном варианте осуществления настоящего раскрытия, предусмотрены SBW-режим с использованием двух электромоторов (2M-SBW), EPS-режим с использованием двух электромоторов (2M-EPS), SBW-режим с использованием одного электромотора (1M-SBW), EPS-режим с использованием одного электромотора (1M-EPS) и режим ручного руления (MS).
В SBW-режиме с использованием двух электромоторов, управление рулением по проводам выполняется посредством двух электромоторов. В EPS-режиме с использованием двух электромоторов, управление рулением на основе электрического усилителя выполняется посредством двух электромоторов. Кроме того, в SBW-режиме с использованием одного электромотора, управление рулением по проводам выполняется только посредством одного электромотора. В EPS-режиме с использованием одного электромотора, управление рулением на основе электрического усилителя выполняется только посредством одного электромотора. Далее в режиме ручного руления, управление рулением полностью прекращается.
[0023] SBW-режим с использованием двух электромоторов
В SBW-режиме с использованием двух электромоторов в состоянии, в котором выводится сигнал управления муфтой для того, чтобы расцеплять муфту 19, первый контроллер 71 поворота управляет приведением в действие первого поворотного электромотора M1, и второй контроллер 72 поворота управляет приведением в действие второго поворотного электромотора M2, за счет чего выполняется управление углом поворота. Иными словами, первый поворотный электромотор M1 и второй поворотный электромотор M2 взаимодействуют таким образом, чтобы совместно использовать и выводить требуемую вращающую силу. С другой стороны, контроллер 73 силы реакции управляет приведением в действие электромотора 52 для формирования силы реакции и за счет этого выполняет управление силой реакции. Таким образом, достигаются намеченные характеристики руления в качестве функции руления по проводам, и достигается приятное ощущение при выполнении действий.
Первый контроллер 71 поворота и второй контроллер 72 поворота задают целевой угол θw* поворота, соответствующий углу θs поворота при рулении, и оценивают фактический угол θw поворота. Затем первый контроллер 71 поворота и второй контроллер 72 поворота принимают углы θm1 и θm2 поворота электромотора и управляют приведением в действие первого поворотного электромотора M1 и второго поворотного электромотора M2 таким образом, что фактический угол θw поворота совпадает с целевым углом θw* поворота, посредством использования, например, надежного способа согласования с моделью.
[0024] Целевой угол θw* поворота задается, например, в зависимости от скорости V транспортного средства. Иными словами, при стационарном рулении или движении на низкой скорости, целевой угол θw* поворота задается таким образом, чтобы получать большой угол θw поворота с небольшим углом θs поворота при рулении, с тем чтобы уменьшать рабочую нагрузку на водителя. Кроме того, при движении на высокой скорости, целевой угол θw* поворота задается таким образом, чтобы подавлять изменение угла θw поворота, соответствующее изменению угла θs поворота при рулении, чтобы подавлять чрезмерно чувствительное поведение транспортного средства, чтобы обеспечивать устойчивость при движении.
Фактический угол θw поворота оценивается на основе угла θs поворота при рулении, угла θm1 поворота электромотора, угла θm2 поворота электромотора и т.п.
Контроллер 73 силы реакции задает целевой крутящий момент Tr* силы реакции, соответствующий силе реакции, принимаемой от поверхности дороги при операции руления, и управляет приведением в действие электромотора 52 для формирования силы реакции таким образом, что крутящий момент электромотора 52 для формирования силы реакции совпадает с целевым крутящим моментом Tr* силы реакции.
Целевой крутящий момент Tr* силы реакции задается на основе, например, угла θs поворота при рулении, тока Im1, протекающего через первый поворотный электромотор M1, тока Im2, протекающего через второй поворотный электромотор M2, и т.п.
[0025] EPS-режим с использованием двух электромоторов
В EPS-режиме с использованием двух электромоторов в состоянии, в котором прекращается вывод сигнала управления муфтой, и в силу этого муфта 19 зацепляется, первый контроллер 71 поворота управляет приведением в действие первого поворотного электромотора M1, и второй контроллер 72 поворота управляет приведением в действие второго поворотного электромотора M2, за счет чего выполняется управление усилением. Таким образом, система рулевого управления соединяется механически, чтобы обеспечивать удобство использования прямого руления, и дополнительно, рабочая нагрузка на водителя уменьшается посредством функции электрического усилителя рулевого управления.
Первый контроллер 71 поворота и второй контроллер 72 поворота задают целевой усиливающий крутящий момент Ta* и управляют приведением в действие первого поворотного электромотора M1 и второго поворотного электромотора M2 таким образом, что крутящий момент первого поворотного электромотора M1 совпадает с целевым усиливающим крутящим моментом Ta*.
[0026] Целевой усиливающий крутящий момент Ta* задается, например, в зависимости от скорости V транспортного средства. Иными словами, при стационарном рулении или движении на низкой скорости, целевой усиливающий крутящий момент Ta* задается большим, с тем чтобы уменьшать рабочую нагрузку на водителя. Кроме того, при движении на высокой скорости, целевой усиливающий крутящий момент Ta* задается меньшим, с тем чтобы подавлять чрезмерно чувствительное поведение транспортного средства, чтобы обеспечивать устойчивость при движении.
С другой стороны, в EPS-режиме с использованием двух электромоторов, разъединяется релейная схема электромотора 52 для формирования силы реакции. Это служит для того, чтобы не допускать приведения в действие электромотора 52 для формирования силы реакции в качестве нагрузки посредством вращения рулевого вала 12, когда водитель выполняет операцию руления, и когда первый контроллер 71 поворота управляет приведением в действие первого поворотного электромотора M1, и второй контроллер 72 поворота управляет приведением в действие второго поворотного электромотора M2.
[0027] SBW-режим с использованием одного электромотора
В SBW-режиме с использованием одного электромотора в состоянии, в котором выводится сигнал управления муфтой для того, чтобы расцеплять муфту 19, и первый контроллер 71 поворота не управляет приведением в действие первого поворотного электромотора M1 (без приведения в действие), второй контроллер 72 поворота управляет приведением в действие второго поворотного электромотора M2, чтобы выполнять управление углом поворота. Иными словами, второй поворотный электромотор M2 выводит только необходимую вращающую силу. С другой стороны, контроллер 73 силы реакции управляет приведением в действие электромотора 52 для формирования силы реакции таким образом, чтобы выполнять управление силой реакции. Таким образом, достигаются намеченные характеристики руления в качестве функции руления по проводам, и достигается приятное ощущение при выполнении действий.
Задание целевого угла θw* поворота, способ управления вторым поворотным электромотором M2, задание целевого реактивного крутящего момента Tr* и способ управления электромотором 52 для формирования силы реакции являются идентичными заданиям и способам в SBW-режиме с использованием двух электромоторов.
С другой стороны, в SBW-режиме с использованием одного электромотора, разъединяется релейная схема первого поворотного электромотора M1, в силу чего первый поворотный электромотор M1 отсоединяется от электрической схемы. Это служит для того, чтобы не допускать приведения в действие первого поворотного электромотора M1 в качестве нагрузки посредством возвратно-поступательного перемещения вала 16 зубчатой рейки, когда второй контроллер 72 поворота управляет приведением в действие второго поворотного электромотора M2.
[0028] EPS-режим с использованием одного электромотора
В EPS-режиме с использованием одного электромотора в состоянии, в котором прекращается вывод сигнала управления муфтой, и в силу этого зацепляется муфта 19, и второй контроллер 72 поворота не управляет приведением в действие второго поворотного электромотора M2 (без приведения в действие), первый контроллер 71 поворота управляет приведением в действие первого поворотного электромотора M1, за счет чего выполняется управление усилением. Таким образом, система рулевого управления соединяется механически, чтобы обеспечивать удобство использования прямого руления, и дополнительно, рабочая нагрузка на водителя уменьшается посредством функции электрического усилителя рулевого управления.
Задание целевого усиливающего крутящего момента Ta* и способ управления первого поворотного электромотора M1 являются идентичными заданию и способу в EPS-режиме с использованием двух электромоторов.
[0029] С другой стороны, в EPS-режиме с использованием одного электромотора, разъединяется релейная схема второго поворотного электромотора M2, в силу чего второй поворотный электромотор M2 отсоединяется от электрической схемы. Это служит для того, чтобы не допускать приведения в действие второго поворотного электромотора M2 в качестве нагрузки посредством возвратно-поступательного перемещения вала 16 зубчатой рейки, когда водитель выполняет операцию руления, и когда первый контроллер 71 поворота управляет приведением в действие первого поворотного электромотора M1. По аналогичной причине, разъединяется релейная схема электромотора 52 для формирования силы реакции, в силу чего электромотор 52 для формирования силы реакции отсоединяется от электрической схемы. Это служит для того, чтобы не допускать приведения в действие электромотора 52 для формирования силы реакции в качестве нагрузки посредством вращения рулевого вала 12, когда водитель выполняет операцию руления, и когда первый контроллер 71 поворота управляет приведением в действие первого поворотного электромотора M1.
[0030] Режим ручного руления
В режиме ручного руления в состоянии, в котором прекращается вывод сигнала управления муфтой, и в силу этого зацепляется муфта 19, первый контроллер 71 поворота не управляет приведением в действие первого поворотного электромотора M1 (без приведения в действие), и второй контроллер 72 поворота не управляет приведением в действие второго поворотного электромотора M2 (без приведения в действие). Иными словами, полностью прекращается управление рулением посредством соответствующих контроллеров. Таким образом, система рулевого управления соединяется механически, чтобы обеспечивать функциональность прямого руления.
В режиме ручного руления, разъединяются релейные схемы первого поворотного электромотора M1 и второго поворотного электромотора M2, в силу чего первый поворотный электромотор M1 и второй поворотный электромотор M2 отсоединяются от электрической схемы. Это служит для того, чтобы не допускать приведения в действие первого поворотного электромотора M1 и второго поворотного электромотора M2 в качестве нагрузок посредством возвратно-поступательного перемещения вала 16 зубчатой рейки, когда водитель выполняет операцию руления. По аналогичной причине, разъединяется релейная схема электромотора 52 для формирования силы реакции, в силу чего электромотор 52 для формирования силы реакции отсоединяется от электрической схемы. Это служит для того, чтобы не допускать приведения в действие электромотора 52 для формирования силы реакции в качестве нагрузки посредством вращения рулевого вала 12, когда водитель выполняет операцию руления.
Выше описано краткое представление режимов управления.
[0031] Далее описывается отказоустойчивый режим.
Соответствующие контроллеры выполнены с возможностью осуществлять самодиагностику в отношении того, являются или нет их системы управления неисправными, и переключать режим управления в зависимости от результата диагностики. Иными словами, первый контроллер 71 поворота выполнен с возможностью диагностировать то, являются неисправными или нет первый контроллер 71 поворота, первый актуатор A1, включающий в себя датчик 34 крутящего момента, либо система электропроводки. Кроме того, второй контроллер 72 поворота выполнен с возможностью диагностировать то, являются неисправными или нет второй контроллер 72 поворота, второй актуатор A2 без датчика крутящего момента, либо система электропроводки. Кроме того, контроллер 73 силы реакции выполнен с возможностью диагностировать то, являются неисправными или нет контроллер 73 силы реакции, электромотор 52 для формирования силы реакции либо система электропроводки.
[0032] Сначала, когда все из системы управления первым контроллером 71 поворота, системы управления вторым контроллером 72 поворота и системы управления контроллером 73 силы реакции являются нормальными, задается SBW-режим с использованием двух электромоторов. Тем не менее, когда низкое напряжение прикладывается к первому поворотному электромотору M1 и второму поворотному электромотору M2, когда первый поворотный электромотор M1 и второй поворотный электромотор M2 перегреваются, когда переключатель зажигания включен при запуске (до тех пор, пока не расцепится муфта 19), когда угол θw поворота достигает максимального угла поворота при достижении концевой опоры и т.п., EPS-режим с использованием двух электромоторов задается в качестве временной меры.
С другой стороны, когда является неисправной, по меньшей мере, одна из системы управления первого контроллера 71 поворота, системы управления второго контроллера 72 поворота и системы управления контроллера 73 силы реакции, режим управления переключается на любой из SBW-режима с использованием одного электромотора, EPS-режима с использованием одного электромотора и режима ручного руления.
[0033] Сначала предполагается, что система управления второго контроллера 72 поворота и система управления контроллера 73 силы реакции являются нормальными, тогда как система управления первого контроллера 71 поворота является неисправной. В этом случае задается SBW-режим с использованием одного электромотора, поскольку только функция руления по проводам и функция электрического усилителя рулевого управления посредством первого актуатора A1 являются неисправными, а функция руления по проводам посредством второго актуатора A2 и функция формирования силы реакции посредством электромотора 52 для формирования силы реакции поддерживаются нормальными.
Кроме того, предполагается, что система управления первого контроллера 71 поворота и система управления контроллера 73 силы реакции являются нормальными, тогда как система управления второго контроллера 72 поворота является неисправной. В этом случае задается EPS-режим с использованием одного электромотора, поскольку только функция руления по проводам посредством второго актуатора A2 является неисправной, а функция электрического усилителя рулевого управления посредством первого актуатора A1 поддерживается нормальной.
[0034] Кроме того, предполагается, что система управления первого контроллера 71 поворота и система управления второго контроллера 72 поворота являются нормальными, тогда как система управления контроллера 73 силы реакции является неисправной. В этом случае задается EPS-режим с использованием одного электромотора, поскольку только функция формирования силы реакции посредством электромотора 52 для формирования силы реакции является неисправной, а функция электрического усилителя рулевого управления посредством первого актуатора A1 поддерживается нормальной.
Кроме того, предполагается, что система управления первого контроллера 71 поворота является нормальной, тогда как система управления второго контроллера 72 поворота и система управления контроллера 73 силы реакции являются неисправными. В этом случае задается EPS-режим с использованием одного электромотора, поскольку только функция руления по проводам посредством второго актуатора A2 и функция формирования силы реакции посредством электромотора 52 для формирования силы реакции являются неисправными, а функция электрического усилителя рулевого управления посредством первого актуатора A1 поддерживается нормальной.
[0035] Кроме того, предполагается, что система управления контроллера 73 силы реакции является нормальной, тогда как система управления первого контроллера 71 поворота и система управления второго контроллера 72 поворота являются неисправными. В этом случае задается режим ручного руления, поскольку функция руления по проводам и функция электрического усилителя рулевого управления посредством первого актуатора A1 и функция руления по проводам посредством второго актуатора A2 являются неисправными, хотя функция формирования силы реакции посредством электромотора 52 для формирования силы реакции поддерживается нормальной.
[0036] Кроме того, предполагается, что система управления второго контроллера 72 поворота является нормальной, тогда как система управления первого контроллера 71 поворота и система управления контроллера 73 силы реакции являются неисправными. В этом случае задается режим ручного руления, поскольку функция руления по проводам или функция электрического усилителя рулевого управления посредством первого актуатора A1 и функция формирования силы реакции посредством электромотора 52 для формирования силы реакции являются неисправными, хотя функция руления по проводам посредством второго актуатора A2 поддерживается нормальной.
Затем предполагается, что все из системы управления первого контроллера 71 поворота, системы управления второго контроллера 72 поворота и системы управления контроллера 73 силы реакции являются неисправными. В этом случае задается режим ручного руления, поскольку все из функции руления по проводам и функции электрического усилителя рулевого управления посредством первого актуатора A1, функции руления по проводам посредством второго актуатора A2 и функции формирования силы реакции посредством электромотора 52 для формирования силы реакции являются неисправными.
Выше описано краткое представление отказоустойчивого режима.
[0037] Далее описывается переключение режима управления.
Сначала, когда все из системы управления первого контроллера 71 поворота, системы управления второго контроллера 72 поворота и системы управления контроллера 73 силы реакции являются нормальными, фактически задается SBW-режим с использованием двух электромоторов. Кроме того, когда низкое напряжение прикладывается к первому поворотному электромотору M1 и второму поворотному электромотору M2, когда первый поворотный электромотор M1 и второй поворотный электромотор M2 перегреваются, когда переключатель зажигания включен при запуске (до тех пор, пока не расцепится муфта 19), когда угол θw поворота достигает максимального угла поворота при достижении концевой опоры и т.п., EPS-режим с использованием двух электромоторов задается в качестве временной меры. Затем, когда исключается состояние, в котором низкое напряжение прикладывается к первому поворотному электромотору M1 и второму поворотному электромотору M2, или в котором первый поворотный электромотор M1 и второй поворотный электромотор M2 перегреваются, когда муфта 19 разъединена, или снижается угол θ поворота, задается SBW-режим с использованием двух электромоторов. Таким образом, при условии, что все из системы управления первого контроллера 71 поворота, системы управления второго контроллера 72 поворота и системы управления функцией контроллера 73 силы реакции являются нормальными, режим управления переключается между SBW-режимом с использованием двух электромоторов и EPS-режимом с использованием двух электромоторов.
[0038] Кроме того, когда неисправность системы управления первого контроллера 71 поворота возникает в качестве первичного отказа в состоянии SBW-режима с использованием двух электромоторов, режим управления переключается на SBW-режим с использованием одного электромотора. Затем, когда неисправность, по меньшей мере, одной из системы управления второго контроллера 72 поворота или системы управления контроллера 73 силы реакции возникает в качестве вторичного отказа в состоянии SBW-режима с использованием одного электромотора, режим управления переключается на режим ручного руления. Таким образом, режим управления не переключается непосредственно из SBW-режима с использованием двух электромоторов на режим ручного руления без перехода через SBW-режим с использованием одного электромотора. Переключение режима управления является избыточным, так что режим управления переключается пошагово в зависимости от уровня интенсивности отказов.
[0039] Кроме того, когда неисправность, по меньшей мере, одной из системы управления второго контроллера 72 поворота и системы управления контроллера 73 силы реакции возникает в качестве первичного отказа в состоянии SBW-режима с использованием двух электромоторов, режим управления переключается на EPS-режим с использованием одного электромотора. Затем, когда неисправность системы управления первого контроллера 71 поворота возникает в качестве вторичного отказа в состоянии EPS-режима с использованием одного электромотора, режим управления переключается на режим ручного руления. Таким образом, режим управления не переключается непосредственно из SBW-режима с использованием двух электромоторов на режим ручного руления без перехода через EPS-режим с использованием одного электромотора. Переключение режима управления является избыточным, так что режим управления переключается пошагово в зависимости от уровня интенсивности отказов.
[0040] Кроме того, когда неисправность, по меньшей мере, одной из системы управления второго контроллера 72 поворота и системы управления контроллера 73 силы реакции возникает в качестве первичного отказа в состоянии EPS-режима с использованием двух электромоторов в качестве временной меры, режим управления переключается на EPS-режим с использованием одного электромотора. Затем, когда неисправность системы управления первого контроллера 71 поворота возникает в качестве вторичного отказа в состоянии EPS-режима с использованием одного электромотора, режим управления переключается на режим ручного руления. Таким образом, режим управления не переключается непосредственно из EPS-режима с использованием двух электромоторов на режим ручного руления без перехода через EPS-режим с использованием одного электромотора. Переключение режима управления является избыточным, так что режим управления переключается пошагово в зависимости от уровня интенсивности отказов.
Следует отметить, что, когда неисправность системы управления первого контроллера 71 поворота возникает в состоянии EPS-режима с использованием двух электромоторов в качестве временной меры, режим управления непосредственно переключается в режим ручного руления, поскольку переключение в EPS-режим с использованием одного электромотора является невозможным.
Выше описано переключение режима управления.
[0041] Далее описывается система снижения числа оборотов в состоянии холостого хода.
Снижение числа оборотов в состоянии холостого хода (IS) является функцией автоматической остановки двигателя (прекращения работы двигателя на холостом ходу), когда транспортное средство останавливается на перекрестке, вследствие пробок и т.п., и повторного запуска двигателя, когда транспортное средство начинает движение. Снижение числа оборотов в состоянии холостого хода также упоминается как "прекращение работы на холостом ходу" или "глушение двигателя на холостом ходу".
В данном документе, описывается схематичная конфигурация системы снижения числа оборотов в состоянии холостого хода.
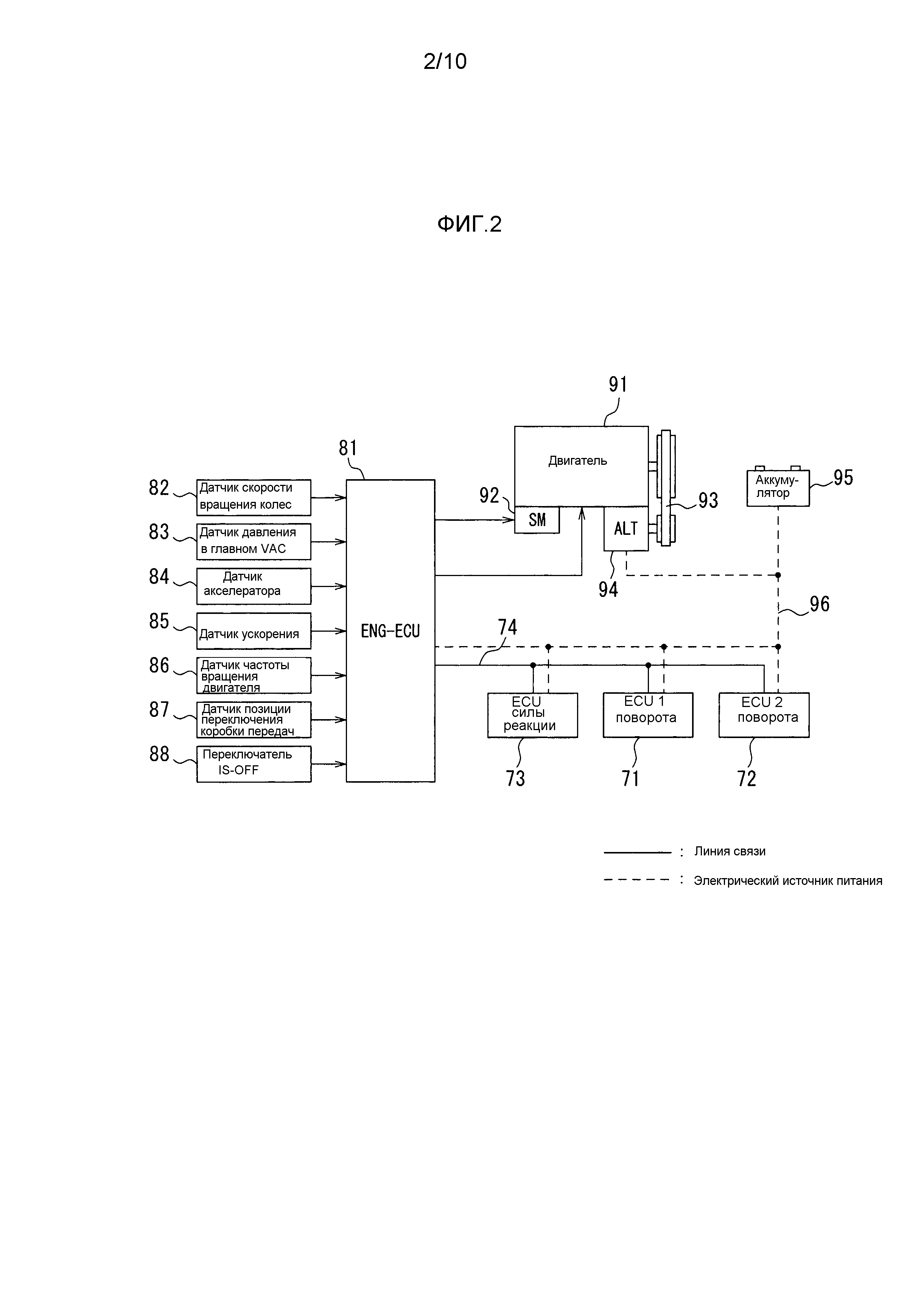
Фиг. 2 является схемой принципиальной конфигурации системы снижения числа оборотов в состоянии холостого хода.
В системе снижения числа оборотов в состоянии холостого хода, контроллер 81 двигателя (ENG-ECU) выполнен с возможностью осуществлять управление снижением числа оборотов в состоянии холостого хода в зависимости от значений обнаружения из различных датчиков. Различные датчики включают в себя, например, датчик 82 скорости вращения колес, датчик 83 давления в главном VAC, датчик 84 акселератора, датчик 85 ускорения, датчик 86 частоты вращения двигателя, датчик 87 позиции переключения коробки передач, переключатель 88 деактивации режима снижения числа оборотов в состоянии холостого хода и т.п. Кроме того, контроллер 81 двигателя подключается к другим контроллерам, таким как первый контроллер 71 поворота, второй контроллер 72 поворота, контроллер 73 силы реакции и т.п., через линию 74 связи, чтобы допускать обмен с ними, и, например, также принимает сигнал управления углом поворота при рулении.
[0042] Датчик 82 скорости вращения колес выполнен с возможностью обнаруживать скорости VwFL-VwRR вращения колес. Датчик 82 скорости вращения колес выполнен с возможностью, например, обнаруживать линии магнитного поля роторов датчиков с помощью схем обнаружения и преобразовывать изменения магнитных полей, ассоциированных с вращениями роторов датчиков, в сигналы тока и выводить их в контроллер 81 двигателя. Контроллер 81 двигателя выполнен с возможностью определять скорости VwFL-VwRR вращения колес на основе сигналов входного тока.
Датчик 83 давления в главном VAC выполнен с возможностью обнаруживать давление в главном VAC (тормозном усилителе) в качестве силы Pb нажатия педали тормоза. Датчик 83 давления в главном VAC выполнен с возможностью принимать давление в главном VAC в диафрагменном блоке и обнаруживать деформацию, вызываемую в пьезорезистивном элементе через диафрагменный блок, в качестве изменения электрического сопротивления и преобразовывать деформацию в сигнал напряжения, пропорциональный давлению, и выводить его в контроллер 81 двигателя. Контроллер 81 двигателя выполнен с возможностью определять давление в главном VAC, т.е. силу Pb нажатия педали тормоза на основе сигнала входного напряжения.
[0043] Датчик 84 акселератора выполнен с возможностью обнаруживать степень PPO открытия педали (рабочую позицию), соответствующую нажатой величине педали акселератора. Датчик 84 акселератора может представлять собой, например, потенциометр и выполнен с возможностью преобразовывать степень PPO открытия педали для педали акселератора в сигнал напряжения и выводить его в контроллер 81 двигателя. Контроллер 81 двигателя выполнен с возможностью определять степень PPO открытия педали для педали акселератора на основе сигнала входного напряжения. Следует отметить, что степень PPO открытия педали составляет 0 процентов, когда педаль акселератора находится в нерабочей позиции, и степень PPO открытия педали составляет 100 процентов, когда педаль акселератора находится в максимальной рабочей позиции (конец хода).
[0044] Датчик 85 ускорения выполнен с возможностью обнаруживать ускорение/замедление в направлении спереди назад транспортного средства. Датчик 85 ускорения выполнен с возможностью обнаруживать изменение позиции подвижного электрода относительно неподвижного электрода в качестве изменения электростатической емкости, например, и преобразовывать его в сигнал напряжения, пропорциональный ускорению/замедлению и направлению, и выводить его в контроллер 81 двигателя. Контроллер 81 двигателя выполнен с возможностью определять ускорение/замедление на основе сигнала входного напряжения. Следует отметить, что контроллер 81 двигателя выполнен с возможностью трактовать ускорение в качестве положительного значения и трактовать замедление в качестве отрицательного значения.
Датчик 86 частоты вращения двигателя выполнен с возможностью обнаруживать частоту Ne вращения двигателя. Датчик 86 частоты вращения двигателя, например, выполнен с возможностью обнаруживать линии магнитного поля ротора датчика с помощью схемы обнаружения и преобразовывать изменение магнитных полей, ассоциированных с вращением ротора датчика, в сигнал тока и выводить его в контроллер 81 двигателя. Контроллер 81 двигателя выполнен с возможностью определять частоту Ne вращения двигателя на основе сигналов входного тока.
[0045] Датчик 87 позиции переключения коробки передач выполнен с возможностью обнаруживать позицию переключения передач трансмиссии. Датчик 87 позиции переключения коробки передач, например, включает в себя несколько устройств на эффекте Холла и выполнен с возможностью выводить соответствующие сигналы включения/выключения устройств на эффекте Холла в контроллер 81 двигателя. Контроллер 81 двигателя выполнен с возможностью определять позицию переключения коробки передач на основе комбинации входных сигналов включения/выключения.
Переключатель 88 деактивации режима снижения числа оборотов в состоянии холостого хода (переключатель IS-OFF) выполнен с возможностью обнаруживать операцию отмены работы системы снижения числа оборотов в состоянии холостого хода. Переключатель 88 деактивации режима снижения числа оборотов в состоянии холостого хода обеспечивается рядом приборной панелью, так что водитель может нажимать его, и выполнен с возможностью выводить сигнал напряжения в зависимости от операции отмены в контроллер 81 двигателя через схему обнаружения с нормально замкнутым контактом. Контроллер 81 двигателя выполнен с возможностью определять то, следует или нет отменять функцию снижения числа оборотов в состоянии холостого хода, на основе сигнала входного напряжения.
[0046] Контроллер 81 двигателя выполнен с возможностью управлять остановкой и повторным запуском двигателя 91 посредством выполнения управления впрыском топлива через топливный инжектор и управления распределением зажигания через катушку зажигания. Кроме того, контроллер 81 двигателя выполнен с возможностью управлять проворачиванием посредством стартерного электромотора 92 при повторном запуске двигателя.
Стартерный электромотор 92 включает в себя, например, последовательный коллекторный электромотор и выполнен с возможностью проворачивать двигатель 91 посредством передачи крутящего момента посредством зацепления ведущей шестерни выходного вала с коронной шестерней двигателя 91. Стартерный электромотор 92 включает в себя соленоид для того, чтобы обеспечивать плавное перемещение ведущей шестерни в осевом направлении, с тем чтобы перемещать ведущую шестерню между выступающей позицией, в которой ведущая шестерня зацепляется с коронной шестерней двигателя 91, и убранной позицией, в которой ведущая шестерня не зацепляется с коронной шестерней.
[0047] Мощность двигателя 91 передается в генератор 94 переменного тока через змеевидный клиновой ремень 93. Генератор 94 переменного тока выполнен с возможностью формировать электричество посредством мощности, передаваемой через клиновой ремень 93. Аккумулятор 95 заряжается посредством вырабатываемой электроэнергии. Аккумулятор 95 выполнен с возможностью подавать электроэнергию в различное электрооборудование, смонтированное на транспортном средстве. Иными словами, аккумулятор 95 выполнен с возможностью подавать электроэнергию в контроллер 81 двигателя, стартерный электромотор 92, первый контроллер 71 поворота, первый поворотный электромотор M1, второй контроллер 72 поворота, второй поворотный электромотор M2, контроллер 73 силы реакции, электромотор 51 для формирования силы реакции и т.п.
Выше описана схематичная конфигурация системы снижения числа оборотов в состоянии холостого хода.
[0048] Далее приводится краткое описание операции управления снижением числа оборотов в состоянии холостого хода.
В системе снижения числа оборотов в состоянии холостого хода, например, когда все следующие условия разрешения удовлетворяются, система переводится в состояние ожидания, в котором разрешается снижение числа оборотов в состоянии холостого хода.
- Переключатель 88 IS-OFF не задействован (функция снижения числа оборотов в состоянии холостого хода находится в активированном состоянии).
- Состояние заряда (SOC) аккумулятора 95 составляет 70 процентов или больше.
- Позиция переключения коробки передач находится в диапазоне, отличном от R-диапазона.
[0049] Из вышеуказанного состояния ожидания, когда все следующие условия активации удовлетворяются, и, например, истекла одна секунда, двигатель 91 остановливается.
- Скорость V транспортного средства составляет 0 км/ч.
- Степень PPO открытия педали акселератора составляет 0 процентов.
- Сила Pb нажатия педали тормоза, например, равна или превышает 0,8 МПа.
- Градиент поверхности дороги, например, равен или меньше 14 процентов.
- Частота Ne вращения двигателя, например, составляет меньше 1200 об/мин.
При этих условиях, среднее значение скоростей VwFL-VwRR вращения колес и т.п. используется в качестве скорости V транспортного средства. Кроме того, градиент поверхности дороги вычисляется на основе ускорения/замедления. Следует отметить, что градиент поверхности дороги вычисляется как "(вертикальное расстояние/горизонтальное расстояние)*100 и обработка фильтрации нижних частот выполняется при 1 Гц.
[0050] Из вышеуказанного остановленного состояния, когда любое из следующих условий повторного запуска удовлетворяется, двигатель 91 повторно запускается.
- Операция руления начата в режиме снижения числа оборотов в состоянии холостого хода.
- Скорость V транспортного средства, например, равна или превышает 2 км/ч.
- Степень PPO открытия педали акселератора равна или превышает 50 процентов.
- Операция переключения передач из P-диапазона в R-диапазон или D-диапазон выполняется.
- Операция переключения передач из N-диапазона в R-диапазон или D-диапазон выполняется.
- Операция переключения передач из D-диапазона в R-диапазон выполняется.
Контроллер 81 двигателя выполнен с возможностью выводить сигнал режима снижения числа оборотов в состоянии холостого хода (сигнал IS-режима), включающий в себя состояние активации снижения числа оборотов в состоянии холостого хода и присутствие или отсутствие запроса на повторный запуск, в первый контроллер 71 поворота, второй контроллер 72 поворота и контроллер 73 силы реакции через линию 74 связи.
Выше приведено краткое описание операции управления снижением числа оборотов в состоянии холостого хода.
[0051] Далее описывается обработка управления рулением по проводам, связанная с системой снижения числа оборотов в состоянии холостого хода.
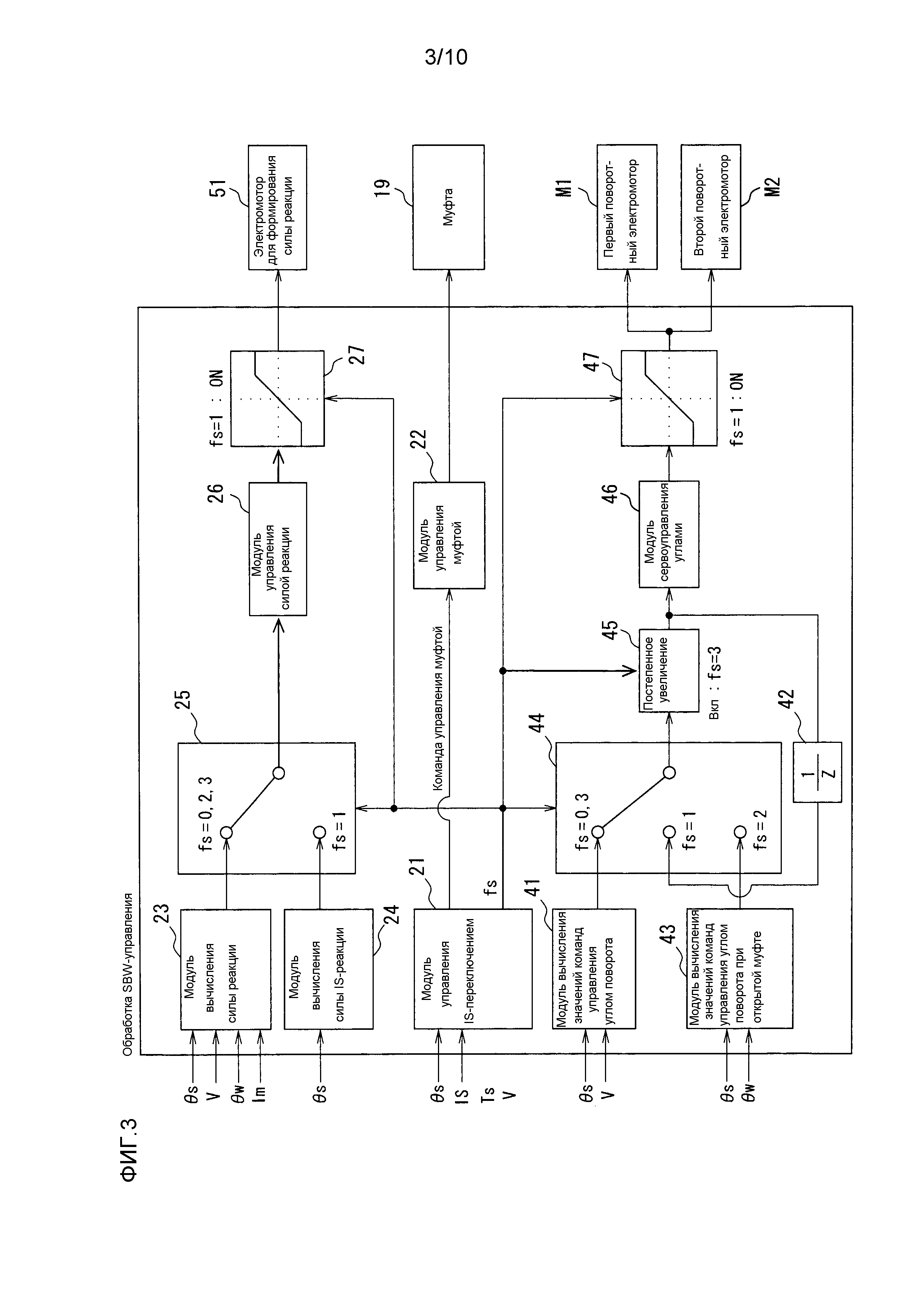
Фиг. 3 является блок-схемой, иллюстрирующей полную конфигурацию обработки управления рулением по проводам.
Обработка управления рулением по проводам по отдельности вычисляется в каждом из первого контроллера 71 поворота, второго контроллера 72 поворота и контроллера 73 силы реакции, и когда результаты вычисления посредством соответствующего контроллера совпадают между собой, разрешается выполнение управления приведением в действие. Следует отметить, что как описано выше, первый контроллер 71 поворота выполнен с возможностью осуществлять управление приведением в действие первого поворотного электромотора M1, второй контроллер 72 поворота выполнен с возможностью осуществлять управление приведением в действие второго поворотного электромотора M2, и контроллер 73 силы реакции выполнен с возможностью осуществлять управление приведением в действие электромотора 51 для формирования силы реакции.
[0052] Обработка управления рулением по проводам включает в себя модуль 21 управления IS-переключением, модуль 22 управления муфтой, модуль 23 вычисления силы реакции, модуль 24 вычисления силы IS-реакции, модуль 25 переключения силы реакции, модуль 26 управления силой реакции, процессор 27 задания ограничений, модуль 41 вычисления значений команд управления углом поворота, модуль 42 хранения предыдущих значений, модуль 43 вычисления значений команд управления углом поворота при открытой муфте, модуль 44 переключения значений команд управления углом поворота, процессор 45 управления постепенным увеличением, модуль 46 сервоуправления углами и процессор 47 задания ограничений.
Модуль 21 управления IS-переключением выполнен с возможностью осуществлять обработку управления IS-переключением, описанную ниже, чтобы выводить команду управления муфтой для управления расцеплением и зацеплением муфты 19, а также выводить флаг fs переключения для переключения характеристики управления силой реакции и характеристики управления углом поворота. Флаг fs переключения переключается в диапазоне 0-3. В случае fs=0, используются характеристика управления обычной силой реакции и характеристика управления обычным углом поворота. В случае fs=1, используются характеристика управления силой реакции и характеристика управления углом поворота, когда снижение числа оборотов в состоянии холостого хода активируется. Кроме того, в случае fs=2, используются характеристика управления углом поворота, когда муфта расцепляется, и характеристика управления обычной силой реакции. В случае fs=3, используется характеристика управления углом поворота, когда двигатель повторно запускается из режима снижения числа оборотов в состоянии холостого хода, и характеристика управления обычной силой реакции.
[0053] Модуль 22 управления муфтой выполнен с возможностью расцеплять или зацеплять муфту 19 в соответствии с командой управления муфтой из модуля 21 управления IS-переключением.
Модуль 23 вычисления силы реакции выполнен с возможностью задавать обычный целевой крутящий момент TrN силы реакции, соответствующий силе реакции, принимаемой из поверхности дороги согласно операции руления, и выводить его при выполнении любого из SBW-режима с использованием двух электромоторов и SBW с использованием одного электромотора. Следует отметить, что сила реакции, принимаемая из поверхности дороги, определяется на основе угла θs поворота при рулении, скорости V транспортного средства, угла θw поворота, тока Im1, протекающего в первом поворотном электромоторе M1, тока Im2, протекающего во втором поворотном электромоторе M2, и т.п.
Модуль 24 вычисления силы IS-реакции выполнен с возможностью задавать и выводить целевую силу TrIS реакции, которая должна формироваться во время снижения числа оборотов в состоянии холостого хода посредством способа, отличающегося от способа для модуля 23 вычисления силы реакции, когда снижение числа оборотов в состоянии холостого хода активируется. В этом примере, целевая сила TrIS реакции задается равной крутящему моменту в пределах диапазона, меньшего целевого крутящего момента TrN силы реакции, и допускает недопущение вращения руля 11 за счет своего веса вследствие баланса центра, даже если водитель снимает руку с руля 11. В частности, целевая сила TrIS реакции задается на основе, по меньшей мере, одного из сопротивления пружины в зависимости от угла θs поворота при рулении и вязкостного сопротивления в зависимости от скорости θs' изменения угла поворота при рулении.
[0054] Модуль 25 переключения силы реакции выполнен с возможностью переключать крутящий момент силы реакции, который должен выводиться в качестве конечного целевого крутящего момента Tr* силы реакции, между целевой силой TrN реакции, вычисленной посредством модуля 23 вычисления силы реакции, и целевой силой TrIS реакции, вычисленной посредством модуля 24 вычисления силы IS-реакции, в зависимости от флага fs переключения и выводить конечный целевой крутящий момент Tr* силы реакции. В частности, когда флаг fs переключения равен любому из 0, 2 и 3, целевая сила TrN реакции выбирается в качестве конечного целевого крутящего момента Tr* силы реакции. Когда флаг fs переключения равен 1, целевая сила TrIS реакции выбирается в качестве конечного целевого крутящего момента Tr* силы реакции.
Модуль 26 управления силой реакции выполнен с возможностью вычислять значение команды управления током для электромотора 51 для формирования силы реакции таким образом, чтобы формировать целевой крутящий момент Tr* силы реакции и управлять приведением в действие электромотора 51 для формирования силы реакции на основе значения команды управления током. В этом примере, модуль 26 управления силой реакции выполнен с возможностью вычислять значение команды управления током на основе сервоуправления силой реакции, включающего в себя управление с прямой связью, управление с обратной связью и устойчивую компенсацию.
[0055] Процессор 27 задания ограничений выполнен с возможностью осуществлять обработку задания ограничений для значения команды управления током для электромотора 51 для формирования силы реакции в зависимости от флага fs переключения. В частности, когда флаг fs переключения равен 1, процессор 27 задания ограничений выполняет обработку задания ограничений для значения команды управления током, в противном случае, т.е. когда флаг fs переключения равен любому из 0, 2 и 3, процессор 27 задания ограничений не выполняет обработку задания ограничений для значения команды управления током.
Модуль 41 вычисления значений команд управления углом поворота выполнен с возможностью задавать и выводить обычный целевой угол θwN поворота для угла θs поворота при выполнении любого из SBW-режима с использованием двух электромоторов и SBW с использованием одного электромотора. Следует отметить, что обычный целевой угол θwN поворота задается на основе соотношения угла θs поворота при рулении и угла поворота в зависимости от скорости V транспортного средства.
Предыдущее значение θw*(n-1) целевого угла θw* поворота сохраняется в модуле 42 хранения предыдущих значений и выводится из него.
[0056] Модуль 43 вычисления значений команд управления углом поворота при открытой муфте выполнен с возможностью задавать и выводить целевой угол θwCL поворота, который должен использоваться в состоянии, в котором муфта расцепляется, посредством способа, отличающегося от способа для модуля 41 вычисления значений команд управления углом поворота при расцеплении муфты 19, которая находится в зацепленном состоянии, с тем чтобы быстро и надежно расцеплять ее. В этом примере, сначала угол поворота задается таким образом, что градиент изменения угла θw поворота совпадает с градиентом изменения угла θs поворота при рулении. Затем угол поворота, заданный так, как описано выше, корректируется, с тем чтобы уменьшать крутящий момент поворота при рулении. Скорректированный угол поворота задается в качестве целевого угла θwCL поворота. В частности, вычисляется разность Δθ (=θs-θw) между углом θs поворота при рулении и углом θw поворота, и угол θd поворота (θd=θs-Δθ) задается равным значению, полученному посредством вычитания разности Δθ из угла θs поворота при рулении. Затем величина θt коррекции для уменьшения (отмены) крутящего момента Ts поворота при рулении задается равной значению, полученному посредством умножения крутящего момента Ts поворота при рулении на предварительно установленное усиление. Затем целевой крутящий момент поворота θwCL задается равным значению, полученному посредством суммирования величины θt коррекции с углом θd поворота. Таким образом, рулевой вал 12 и вал 18 первой шестерни перемещаются аналогично после вывода команды зацепления для муфты 19, и в силу этого можно подавлять увеличение крутящего момента Ts поворота при рулении. Следовательно, можно подавлять увеличение силы зацепления ролика в кулачковом роликовом механизме, включенном в двигатель 91, и в силу этого муфта 19 легко расцепляется.
[0057] Модуль 44 переключения значений команд управления углом поворота выполнен с возможностью переключать угол поворота при рулении, который должен выводиться в качестве конечного целевого угла θw* поворота, между целевым углом θwN поворота, вычисленным посредством модуля 41 вычисления значений команд управления углом поворота, предыдущим значением θw*(n-1), сохраненным в модуле 42 хранения предыдущих значений, целевым углом θwCL поворота, вычисленный посредством модуля 43 вычисления значений команд управления углом поворота при открытой муфте, в зависимости от флага fs переключения и выводить конечный целевой угол θw* поворота. В частности, когда флаг fs переключения равен любому из 0 и 3, целевой угол θwN поворота выбирается в качестве конечного целевого угла θw* поворота. Когда флаг fs переключения равен 1, предыдущее значение θw*(n-1) выбирается в качестве конечного целевого угла θw* поворота. Кроме того, когда флаг fs переключения равен 2, целевой угол θwCL поворота выбирается в качестве конечного целевого угла θw* поворота.
[0058] Процессор 45 управления постепенным увеличением выполнен с возможностью осуществлять обработку постепенного увеличения для конечного целевого угла θw* поворота, в зависимости от флага fs переключения. Обработка постепенного увеличения постепенно изменяет целевой угол поворота при рулении таким образом, что он достигает исходного значения θw* в то время, когда предварительно определенное время TF постепенного увеличения истекло, и служит как ограничитель скорости для подавления внезапного изменения целевого угла θw* поворота. В частности, на основе числа вычислений, выполняемых во время TF постепенного увеличения, задается величина изменения угла поворота, которая должна изменяться в расчете на одно вычисление, и целевой угол θw* поворота изменяется на величину изменения. В этом примере, когда флаг переключения fs=2, обработка постепенного увеличения для целевого угла θw* поворота выполняется, а когда флаг переключения fs=0, 1 или 3, обработка постепенного увеличения для целевого угла θw* поворота не выполняется.
[0059] Модуль 46 сервоуправления углами выполнен с возможностью, в SBW-режиме с использованием двух электромоторов, вычислять значения команд управления током для первого поворотного электромотора M1 и для второго поворотного электромотора M2, чтобы получать целевой угол θw* поворота, и управлять приведением в действие первого поворотного электромотора M1 и второго поворотного электромотора M2 на основе значений команд управления током. Кроме того, модуль 46 сервоуправления углами выполнен с возможностью, в SBW-режиме с использованием одного электромотора, вычислять значение команды управления током для второго поворотного электромотора M2, чтобы получать целевой угол θw* поворота, и управлять приведением в действие второго поворотного электромотора M2 на основе значения команды управления током. В этом примере, модуль 46 сервоуправления углами выполнен с возможностью вычислять значение команды управления током на основе сервоуправления силой реакции, включающего в себя управление с прямой связью, управление с обратной связью и устойчивую компенсацию.
[0060] Процессор 47 задания ограничений выполнен с возможностью, в SBW-режиме с использованием двух электромоторов, выполнять обработку задания ограничений для значений команд управления током для первого поворотного электромотора M1 и второго поворотного электромотора M2 в зависимости от флага fs переключения. В этом примере, процессор 47 задания ограничений выполнен с возможностью осуществлять обработку задания ограничений таким образом, что потребление мощности первого поворотного электромотора M1 и второго поворотного электромотора M2 меньше потребления мощности электромотора 51 для формирования силы реакции. Кроме того, процессор 47 задания ограничений выполнен с возможностью, в SBW-режиме с использованием одного электромотора, выполнять обработку задания ограничений для значения команды управления током для второго поворотного электромотора M2 в зависимости от флага fs переключения. В этом примере, процессор 47 задания ограничений выполнен с возможностью осуществлять обработку задания ограничений таким образом, что потребление мощности второго поворотного электромотора M2 меньше потребления мощности электромотора 51 для формирования силы реакции. В обоих случаях, когда флаг переключения fs=1, выполняется обработка задания ограничений на значение команды управления током, в противном случае, т.е. когда флаг переключения fs=0, 2 или 3, обработка задания ограничений на значение команды управления током не выполняется.
Выше описана полная конфигурация обработки управления рулением по проводам.
[0061] Далее описывается обработка управления IS-переключением. Модуль 21 управления IS-переключением выполнен с возможностью осуществлять обработку управления IS-переключением через каждое предварительно заданное время (например, 5 мс).
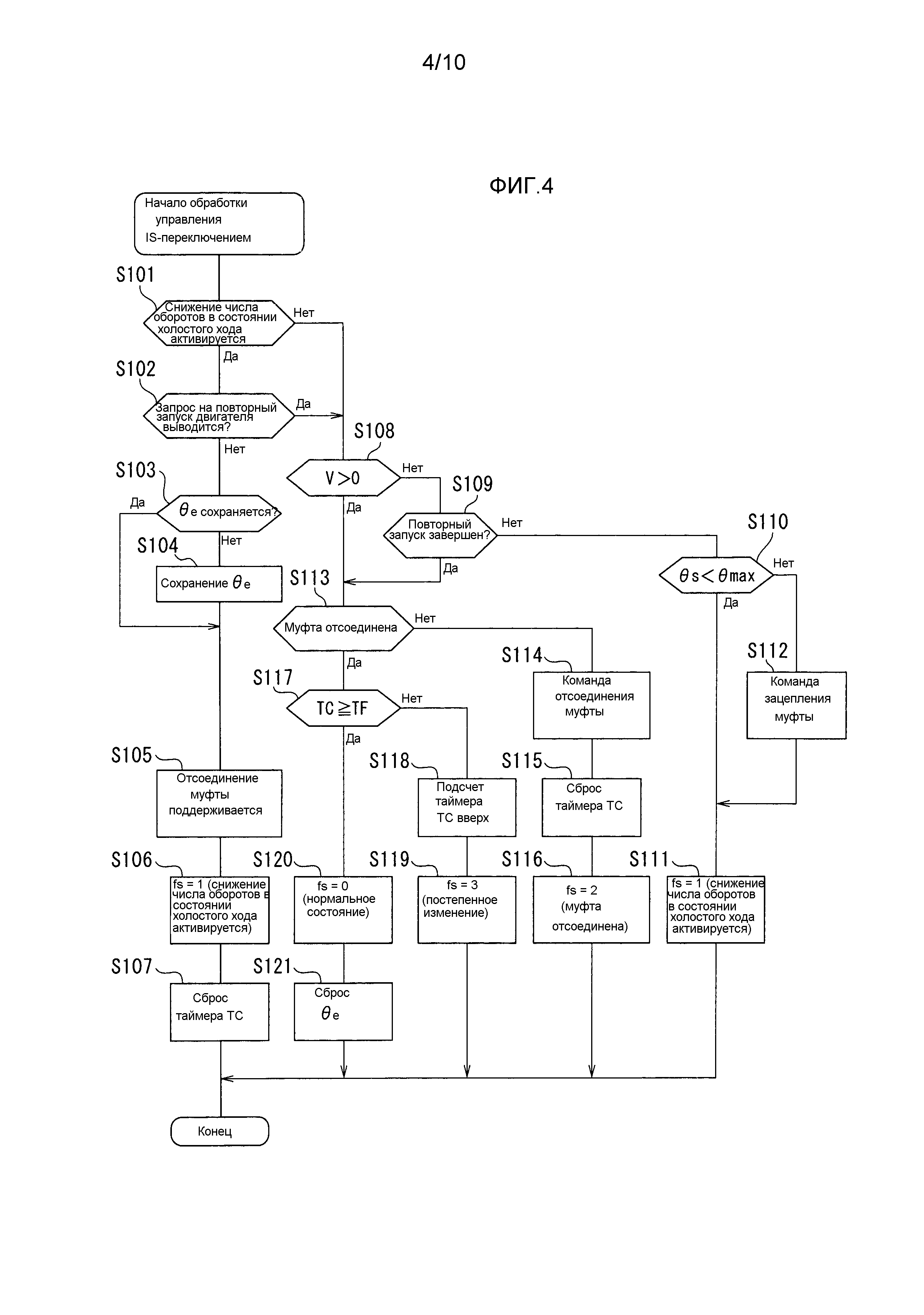
Фиг. 4 является блок-схемой последовательности операций способа, иллюстрирующей обработку управления IS-переключением.
Сначала на этапе S101 определяется то, активируется или нет снижение числа оборотов в состоянии холостого хода. Когда снижение числа оборотов в состоянии холостого хода активируется, обработка переходит к этапу S102. С другой стороны, когда снижение числа оборотов в состоянии холостого хода не активируется, обработка переходит к этапу S108.
На этапе S102 определяется то, выводится или нет запрос на повторный запуск двигателя 91 после того, как активируется снижение числа оборотов в состоянии холостого хода. Когда запрос на повторный запуск не выводится, обработка переходит к этапу S103. С другой стороны, когда запрос на повторный запуск выводится, обработка переходит к этапу S108.
[0062] На этапе S103 начальный угол θe поворота при IS-рулении задается равным углу θs поворота при рулении во время активации снижения числа оборотов в состоянии холостого хода, и определяется то, сохраняется или нет начальный угол θe поворота при IS-рулении. Когда начальный угол θe поворота при IS-рулении не сохраняется, определяется то, что это момент непосредственно после того, как активировано снижение числа оборотов в состоянии холостого хода, и обработка переходит к этапу S104. С другой стороны, когда начальный угол θe поворота при IS-рулении сохраняется, определяется то, что это не момент непосредственно после того, как активировано снижение числа оборотов в состоянии холостого хода, и обработка переходит к этапу S105.
На этапе S104 угол θs поворота при рулении сохраняется в качестве начального угла θe поворота при IS-рулении, и после этого обработка переходит к этапу S105.
На этапе S105 расцепленное состояние муфты 19 поддерживается.
На этапе S106 флаг fs переключения задается равным 1 и выводится. Таким образом, управление рулением по проводам выполняется согласно характеристике управления силой реакции и характеристике управления углом поворота, которые должны использоваться, когда снижение числа оборотов в состоянии холостого хода активируется.
На этапе S107 таймер TC сбрасывается до 0, и после этого обработка возвращается в предварительно определенную основную программу.
[0063] На этапе S108 определяется то, превышает или нет скорость V транспортного средства 0. Когда определяется то, что V=0, определяется то, что транспортное средство остановлено, и обработка переходит к этапу S109. С другой стороны, определяется то, что V>0, определяется то, что транспортное средство движется или едет, и обработка переходит к этапу S113.
На этапе S109 определяется то, завершается или нет повторный запуск двигателя 91. Когда повторный запуск двигателя 91 не завершается, обработка переходит к этапу S110. С другой стороны, когда повторный запуск двигателя 91 завершается, обработка переходит к этапу S113.
[0064] На этапе S110 определяется то, меньше или нет угол θs поворота при рулении максимального угла θmax поворота при рулении, соответствующего максимальному углу поворота, заданному конструктивно. Когда определяется то, что θs<θmax, определяется то, что увеличение угла θs поворота при рулении является допустимым, и обработка переходит к этапу S111. С другой стороны, когда определяется то, что θs≥θmax, определяется то, что увеличение угла θs поворота при рулении не является допустимым, и обработка переходит к этапу S112.
На этапе S111 флаг fs переключения задается равным 1 и выводится. Затем обработка возвращается в предварительно определенную основную программу. Таким образом, управление рулением по проводам выполняется согласно характеристике управления силой реакции и характеристике управления углом поворота, которые должны использоваться, когда снижение числа оборотов в состоянии холостого хода активируется.
На этапе S112 команда зацепления для муфты 19 выводится. Затем, обработка переходит к этапу S111.
[0065] На этапе S113 определяется то, расцепляется или нет муфта 19. Когда муфта 19 не расцепляется, обработка переходит к этапу S114. С другой стороны, когда муфта 19 расцепляется, обработка переходит к этапу S117.
На этапе S114 команда расцепления для муфты 19 выводится.
На этапе S115 таймер TC сбрасывается до 0.
На этапе S116 флаг fs переключения задается равным 2 и выводится. Затем обработка возвращается в предварительно определенную основную программу. Таким образом, управление рулением по проводам выполняется согласно характеристике управления углом поворота, которая должна использоваться, когда муфта 19 расцепляется, и характеристике управления обычной силой реакции.
На этапе S117,определяется то, равен или превышает либо нет таймер TC время TF постепенного увеличения. Когда определяется то, что TC [0066] На этапе S118 таймер TC подсчитывается вверх. На этапе S119, флаг fs переключения задается равным 3 и выводится. Затем обработка возвращается в предварительно определенную основную программу. Таким образом, управление рулением по проводам выполняется согласно характеристике управления углом поворота, которая должна использоваться при повторном запуске из режима снижения числа оборотов в состоянии холостого хода, и характеристике управления обычной силой реакции. На этапе S120 флаг fs переключения задается равным 0 и выводится. Таким образом, управление рулением по проводам выполняется согласно характеристике управления обычной силой реакции и характеристике управления обычным углом поворота. На этапе S121 сохраненный начальный угол θe поворота при IS-рулении сбрасывается, и затем обработка возвращается в предварительно определенную основную программу. Выше описана обработка управления IS-переключением. [0067] Работа Далее описывается работа первого варианта осуществления. В настоящем варианте осуществления предусмотрены первый поворотный электромотор M1 и второй поворотный электромотор M2, выполненные с возможностью обеспечения движущей силы выходному поворотному механизму StOUT, чтобы выполнять SBW-режим с использованием двух электромоторов, в котором колеса 13L и 13R поворачиваются посредством двух этих электромоторов. Таким образом, достигаются намеченные характеристики руления в качестве функции руления по проводам. Кроме того, посредством приспособления конфигурации, в которой колеса 13L и 13R поворачиваются посредством двух электромоторов, можно совместно использовать необходимую движущую силу для выходного поворотного механизма StOUT. Следовательно, можно подавлять увеличение размера электромотора и иметь превосходные характеристики расположения по сравнению с конфигурацией, в которой колеса 13L и 13R поворачиваются посредством одного электромотора. [0068] Кроме того, в конфигурации, в которой колеса 13L и 13R поворачиваются посредством двух электромоторов, даже если любая одна из систем управления является неисправной, можно использовать другую систему управления, которая не является неисправной. Иными словами, можно выполнять SBW-режим с использованием одного электромотора или EPS-режим с использованием одного электромотора в качестве отказоустойчивого режима для первичного отказа, в который только любая одна из систем управления является неисправной. Таким образом, даже если любая одна из систем управления является неисправной, используется другая система управления, которая не является неисправной. Таким образом, можно осуществлять отказоустойчивый режим, допускающий полное использование преимущества обеспечения двух электромоторов. Кроме того, можно выполнять режим ручного руления в качестве отказоустойчивого режима для противодействия вторичному отказу, при котором другая система управления является неисправной, несмотря на отказоустойчивый режим для противодействия первичному отказу. Таким образом, система рулевого управления соединена механически, чтобы обеспечивать удобство использования прямого руления. [0069] Помимо этого, в каждом из SBW-режима с использованием двух электромоторов и SBW-режима с использованием одного электромотора, муфта 19 расцепляется, чтобы выполнять руление по проводам, когда двигатель 91 находится в рабочем состоянии. Муфта 19 поддерживает зацепленное состояние, когда она не возбуждена (не подается питание). Таким образом, при выключении зажигания для того, чтобы останавливать двигатель 91, который находится в рабочем состоянии, муфта 19 зацепляется. Звук при работе в ходе зацепления муфты при выключении зажигания является практически незаметным, поскольку он вызывается в окружении покидания транспортного средства, и поскольку он смешивается с различными шумами, вызываемыми при покидании транспортного средства, такими как звук открывания замка блокировки двери и т.п. С другой стороны, в состоянии снижения числа оборотов в состоянии холостого хода, шум предположительно должен быть меньше шума в окружении покидания транспортного средства, в силу чего звук при работе в ходе зацепления муфты может привлекать внимание. [0070] Следовательно, когда двигатель 91, который находится в рабочем состоянии, останавливается посредством функции снижения числа оборотов в состоянии холостого хода (определяется как "Да" на этапе S101), и запрос на запуск не выводится (определяется как "Нет" на этапе S102), расцепленное состояние муфты 19 поддерживается (этап S105). Таким образом, когда двигатель 91, который находится в рабочем состоянии, останавливается посредством функции снижения числа оборотов в состоянии холостого хода, расцепленное состояние муфты 19 поддерживается. Следовательно, можно подавлять звук при работе, вызываемый при зацеплении муфты 19. Таким образом, можно способствовать большей тишине в салоне транспортного средства в режиме снижения числа оборотов в состоянии холостого хода. [0071] Следует отметить, что необходимо возбуждать муфту 19 для того, чтобы поддерживать расцепленное состояние муфты 19, в силу чего электроэнергия потребляется для этого. Тем не менее, поскольку снижение числа оборотов в состоянии холостого хода активируется на более высокой частоте, чем включение/выключение зажигания, когда муфта 19 многократно расцепляется и зацепляется каждый раз, когда активируется снижение числа оборотов в состоянии холостого хода, на износостойкость муфты 19 оказывает влияние чрезмерное число операций. Следовательно, посредством поддержания расцепленного состояния муфты 19, когда двигатель 91, который находится в рабочем состоянии, останавливается посредством функции снижения числа оборотов в состоянии холостого хода, можно подавлять число операций расцепления и зацепления муфты 19, и в силу этого оно также является преимущественным в отношении износостойкости. [0072] Помимо этого, руление по проводам потребляет электроэнергию для поворота колес посредством первого поворотного электромотора M1 и второго поворотного электромотора M2 и для формирования силы реакции при рулении посредством электромотора 51 для формирования силы реакции. Тем не менее, генератор 94 переменного тока остановлен в режиме снижения числа оборотов в состоянии холостого хода. Таким образом, в случае обычного транспортного средства с двигателем, отличного от гибридного транспортного средства, т.е. транспортного средства, на котором не монтируются крупный аккумулятор и преобразователь постоянного тока, доступная электроэнергия ограничена. Следовательно, когда руление по проводам обычно выполняется в режиме снижения числа оборотов в состоянии холостого хода, напряжение аккумулятора 95 может падать, и может оказываться влияние на другую электрическую систему. [0073] Временная диаграмма вышеуказанных событий описывается как первый сравнительный пример относительно настоящего варианта осуществления. Фиг. 5 является временной диаграммой, иллюстрирующей первый сравнительный пример. Во время t11 снижение числа оборотов в состоянии холостого хода активируется, и во время t12, операция руления начинается. В этом случае, когда руление по проводам выполняется обычно, поскольку его потребление мощности возрастает, уменьшается напряжение аккумулятора 95. Когда напряжение становится ниже E1, например, уменьшается яркость передних фар. Когда операция руления начинается во время t13, поскольку запрос на запуск двигателя 91 выводится, и проворачивание начато, напряжение аккумулятора 95 дополнительно уменьшается. Когда напряжение становится ниже E2, что ниже E1, например, выключается дисплей навигационной системы. Двигатель 91 фактически повторно запускается во время t14, на другую электрическую систему оказывает влияние падение напряжения аккумулятора 95 вплоть до этого времени. [0074] В настоящем варианте осуществления, когда двигатель 91, который находится в рабочем состоянии, останавливается посредством функции снижения числа оборотов в состоянии холостого хода (определяется как "Да" на этапе S101), и запрос на запуск не выводится (определяется как "Нет" на этапе S102), флаг переключения задается равным 1 (этап S106). Таким образом, процессор 27 задания ограничений выполняет обработку задания ограничений для значения команды управления током для электромотора 51 для формирования силы реакции, и процессор 47 задания ограничений выполняет обработку задания ограничений для значений команд управления током для первого поворотного электромотора M1 и второго поворотного электромотора M2. Следовательно, можно подавлять потребление мощности посредством руления по проводам. Таким образом, можно подавлять падение напряжения аккумулятора 95. [0075] Временная диаграмма вышеуказанных событий описывается как первый пример работы настоящего варианта осуществления. Фиг. 6 является временной диаграммой, иллюстрирующей первый пример работы. Во время t21 снижение числа оборотов в состоянии холостого хода активируется, и во время t22, операция руления начинается. В этом случае, поскольку потребление мощности посредством руления по проводам подавляется, можно подавлять падение напряжения аккумулятора 95. В этом примере, поскольку напряжение не становится ниже E1 посредством простого запуска операции руления. Таким образом, например, яркость передних фар не уменьшается. Когда запрос на запуск двигателя 91 выводится во время t23, поскольку проворачивание начато, напряжение аккумулятора 95 уменьшается, но не становится ниже E2. Следовательно, например, не выключается дисплей навигационной системы. Двигатель 91 фактически перезапускается во время 24, и можно подавлять падение напряжения двигателя 91 вплоть до этого времени. Следовательно, можно подавлять влияние на другую электрическую систему. [0076] Следует отметить, что при подавлении потребления мощности посредством руления по проводам, обработка задания ограничений выполняется таким образом, что потребление мощности посредством первого поворотного электромотора M1 и второго поворотного электромотора M2 меньше потребления мощности посредством электромотора 51 для формирования силы реакции. Это обусловлено тем, что существенное влияние отсутствует, даже если управление углом поворота ограничивается, поскольку транспортное средство остановлено в режиме снижения числа оборотов в состоянии холостого хода, но чрезмерное ограничение силы реакции при рулении переводит руль 11 в состояние, в котором легко вращается руль. Иными словами, руль 11 может вращаться за счет своего веса в зависимости от баланса центра, когда водитель снимает руку с руля 11. Это может вызывать странное ощущение у водителя. Следовательно, посредством выполнения обработки задания ограничений таким образом, что потребление мощности посредством первого поворотного электромотора M1 и второго поворотного электромотора M2 меньше потребления мощности посредством электромотора 51 для формирования силы реакции, можно поддерживать приятное ощущение при выполнении действий. [0077] Кроме того, когда запрос на повторный запуск выводится посредством функции снижения числа оборотов в состоянии холостого хода (определяется как "Да" на этапе S102), и когда повторный запуск фактически завершается (определяется как "Да" на этапе S109), флаг fs переключения задается равным 0 (этап S120). Таким образом, процессор 27 задания ограничений отменяет (прекращает) обработку задания ограничений на значение команды управления током для электромотора 51 для формирования силы реакции, и процессор 47 задания ограничений отменяет (прекращает) обработку задания ограничений на значения команд управления током для первого поворотного электромотора M1 и второго поворотного электромотора M2. Таким образом, можно возвращаться к обычному рулению по проводам и достигать намеченных характеристик руления. [0078] Кроме того, когда транспортное средство движется вследствие, например, градиента поверхности дороги в режиме снижения числа оборотов в состоянии холостого хода (определяется как "Да" на этапе S108), флаг fs переключения задается равным 0 (этап S120). Иными словами, отменяется ограничение приведения в действие электромотора 51 для формирования силы реакции и ограничение приведения в действие первого поворотного электромотора M1 и второго поворотного электромотора M2. Это обусловлено тем, что существенное влияние отсутствует, даже если управление углом поворота ограничивается, поскольку транспортное средство остановлено, но когда транспортное средство начинает движение, управление углом поворота становится важным для того, чтобы обеспечивать рабочие характеристики управления транспортного средства. Следовательно, посредством немедленного возвращения к обычному рулению по проводам, можно подавлять то, что водитель испытывает некомфортное ощущение. Как описано выше, чрезмерное ограничение силы реакции при рулении переводит руль 11 в состояние, в котором легко вращается руль. Когда водитель снимает руку с руля 11 в этом случае, руль 11 может вращаться за счет своего веса в зависимости от баланса центра. Это может вызывать странное ощущение у водителя. [0079] Временная диаграмма вышеуказанных событий описывается как второй сравнительный пример относительно настоящего варианта осуществления. Фиг. 7 является временной диаграммой, иллюстрирующей второй сравнительный пример. Когда снижение числа оборотов в состоянии холостого хода активируется во время t31 и операция руления начинается во время t32, запрос на повторный запуск выводится, соответственно. В этом случае, поскольку сила реакции при рулении составляет практически 0, руль 11 легко вращается, и его угол поворота практически превышает максимальный угол θmax поворота при рулении, соответствующий максимальному углу поворота, заданному конструктивно. Таким образом, когда сила реакции чрезмерно ограничена, сила реакции теряется. Когда руль 11 переводится в состояние, в котором он свободно вращается, водитель может испытывать некомфортное ощущение. Когда двигатель 91 повторно запускается во время t33, обычное руление по проводам выполняется снова. В этом случае, поскольку зазор между углом θs поворота при рулении и углом θw поворота является большим, ток управления углом поворота для коррекции угла θw поворота внезапно повышается. Во время t34 обычная сила реакции при рулении повышается, чтобы возвращать угол θs поворота при рулении, который чрезмерно повернут за рамки максимального угла θmax поворота при рулении. Это может вызывать странное ощущение у водителя. [0080] В настоящем варианте осуществления, когда двигатель 91, который находится в рабочем состоянии, останавливается посредством функции снижения числа оборотов в состоянии холостого хода (определяется как "Да" на этапе S101), и запрос на запуск не выводится (определяется как "Нет" на этапе S102), флаг переключения задается равным 1 (этап S106). Таким образом, модуль 25 переключения силы реакции переключается с обычного целевого крутящего момента TrN силы реакции на целевой крутящий момент TrIS силы реакции, который должен использоваться в режиме снижения числа оборотов в состоянии холостого хода. Этот целевой крутящий момент TrIS силы реакции является крутящим моментом в пределах диапазона, меньшего обычного целевого крутящего момента TrN силы реакции, и допускает недопущение вращения руля 11 за счет своего веса вследствие баланса центра, даже если водитель снимает руку с руля 11. Следовательно, можно подавлять падение напряжения аккумулятора 95 в режиме снижения числа оборотов в состоянии холостого хода. Кроме того, поскольку сила реакции при рулении чрезмерно не ограничивается, можно подавлять ухудшение ощущения при выполнении действий. [0081] Временная диаграмма вышеуказанных событий описывается как второй пример работы настоящего варианта осуществления. Фиг. 8 является временной диаграммой, иллюстрирующей второй пример работы. Когда снижение числа оборотов в состоянии холостого хода активируется во время t41, флаг fs переключения задается равным 1. Таким образом, модуль 44 переключения значений команд управления углом поворота фиксирует предыдущее значение θw*(n-1) угла поворота, которое представляет собой угол поворота во время активации снижения числа оборотов в состоянии холостого хода. Следовательно, можно подавлять потребление мощности в первом поворотном электромоторе M1 или втором поворотном электромоторе M2. Кроме того, посредством фиксации угла θw поворота таким образом, можно не допускать ситуации, в которой интегрированное значение модуля 46 сервоуправления углами накапливается, так что вызывается протекание чрезмерного тока, и в силу этого анормальный шум формируется при возвращении к обычному рулению по проводам после того, как отменяется ограничение. [0082] Когда операция руления начата, запрос на повторный запуск выводится во время t42, и целевой крутящий момент TrIS силы реакции во время снижения числа оборотов в состоянии холостого хода переключается таким образом, что он используется. Таким образом, руль 11 с меньшей вероятностью должен вращаться, и угол θs поворота при рулении постепенно изменяется. Кроме того, целевой крутящий момент TrIS силы реакции задается на основе, по меньшей мере, одного из сопротивления пружины в зависимости от угла θs поворота при рулении и вязкостного сопротивления в зависимости от скорости θs' изменения угла поворота при рулении. Следовательно, можно получать приятное ощущение при выполнении действий. Следует отметить, что причина, по которой обычный целевой крутящий момент TrN силы реакции заменен на целевой крутящий момент TrIS силы реакции, заключается в том, что непосредственно обычный целевой крутящий момент TrN силы реакции имеет значительные ограничения. Иными словами, посредством фиксации угла θw поворота, чтобы ограничивать приведение в действие первого поворотного электромотора M1 и второго поворотного электромотора M2, целевой крутящий момент TrN силы реакции, вычисленный на основе I тока при повороте, также значительно ограничен. [0083] Во время t43, когда угол θs поворота при рулении достигает максимального угла θmax поворота при рулении (определяется как "Нет" на этапе S110), муфта 19 зацеплена (этап S112), и в силу этого угол θs поворота при рулении практически не превышает максимальный угол θmax поворота при рулении и останавливается при практически максимальном углу поворота при рулении. Следовательно, угол θs поворота при рулении практически не возвращается после возвращения к обычному рулению по проводам. Когда повторный запуск двигателя 91 завершается (определяется как "Да" на этапе S109) во время t44, команда расцепления для муфты 19 выводится (этап S114), чтобы возвращаться к обычному рулению по проводам. Во время t45 расцепление муфты 19 завершается (определяется как "Да" на этапе S113), флаг fs переключения задается равным 3 (этап S119). Таким образом, модуль 25 переключения силы реакции переключает целевой крутящий момент силы реакции, который должен выводиться, с целевого реактивного крутящего момента TrIS на обычный крутящий момент TrN силы реакции, и в силу этого обычная сила реакции при рулении повышается. Кроме того, модуль 44 переключения значений команд управления углом поворота переключает целевой угол поворота, который должен выводиться, с предыдущего значения θw*(n-1) угла поворота на обычный угол θwN поворота. [0084] Здесь управление углом поворота выполняется с тем, чтобы получать угол θw поворота, соответствующий углу θs поворота при рулении. Управление углом поворота выполняется медленно с тем, чтобы обеспечивать предварительно определенное время TF постепенного увеличения. Следовательно, можно подавлять внезапное повышение в токе при повороте командуют и внезапное изменение угла θw поворота. Таким образом, можно подавлять раскачивание кузова транспортного средства и формирование анормального шума. Когда время TF постепенного увеличения истекает (определено в качестве "Да" на этапе S117) во время t46, поскольку угол θw поворота, соответствующий углу θs поворота при рулении, получается, флаг fs переключения задается равным 0 (этап S120). Таким образом, можно возвращаться к обычному рулению по проводам и достигать намеченных характеристик руления. Выше приведено описание второго примера работы. [0085] Как описано выше, поскольку угол θw поворота фиксируется в режиме снижения числа оборотов в состоянии холостого хода, если операция руления выполняется в этот период времени, зазор формируется в соотношении между углом θw поворота и углом θs поворота при рулении. В этом случае угол θw поворота скорректирован после возвращения к обычному рулению по проводам в ассоциации с повторным запуском двигателя 91. Желательно корректировать, в общем, медленно, рабочие характеристики руления могут ухудшаться в случае, если зазор является большим. Кроме того, когда скорость коррекции является слишком большой, может возникать раскачивание кузова транспортного средства и анормальный шум. [0086] Временная диаграмма вышеуказанных событий описывается как третий сравнительный пример относительно настоящего варианта осуществления. Фиг. 9 является временной диаграммой, иллюстрирующей третий сравнительный пример. Когда снижение числа оборотов в состоянии холостого хода активируется во время t51, и операция руления начинается во время t52, запрос на повторный запуск выводится, соответственно. В этом случае, поскольку сила реакции при рулении составляет практически 0, руль 11 легко вращается, и его угол поворота практически превышает максимальный угол θmax поворота при рулении, соответствующий максимальному углу поворота, заданному конструктивно. Когда двигатель 91 повторно запускается во время t53, обычное руление по проводам выполняется снова. В этом случае, поскольку зазор между углом θs поворота при рулении и углом θw поворота является большим, ток управления углом поворота для коррекции угла θw поворота внезапно повышается. Следовательно, скорость коррекции угла θw поворота является слишком большой, может возникать раскачивание кузова транспортного средства и анормальный шум. Во время t54 обычная сила реакции при рулении повышается, чтобы уменьшать угол θs поворота при рулении, который вращается чрезмерно. [0087] В настоящем варианте осуществления, когда двигатель 91 повторно запускается посредством функции снижения числа оборотов в состоянии холостого хода (определяется как "Да" на этапе S109), отменяется ограничение приведения в действие поворотного электромотора и приведения в действие электромотора для формирования силы реакции. Когда угол θs поворота при рулении изменяется в то время, когда двигатель 91 находится в остановленном состоянии, и в силу этого зазор формируется между углом θw поворота и углом поворота при рулении, первый поворотный электромотор M1 и второй поворотный электромотор M2 приводятся в действие, с тем чтобы обеспечивать предварительно определенное время TF постепенного увеличения на исключение зазора. Следовательно, когда зазор является небольшим, угол θw поворота медленно корректируется. Даже когда зазор является большим, поскольку угол θw поворота скорректирован в пределах предварительно определенного времени TF постепенного увеличения, можно более плавно восстанавливать надлежащий угол поворота. [0088] Временная диаграмма вышеуказанных событий описывается как третий пример работы настоящего варианта осуществления. Фиг. 10 является временной диаграммой, иллюстрирующей третий пример работы. Когда снижение числа оборотов в состоянии холостого хода активируется во время t61, флаг fs переключения задается равным 1. Таким образом, модуль 44 переключения значений команд управления углом поворота фиксирует предыдущее значение θw*(n-1) угла поворота, которое представляет собой угол поворота во время активации снижения числа оборотов в состоянии холостого хода. Следовательно, можно подавлять потребление мощности в первом поворотном электромоторе M1 или втором поворотном электромоторе M2. Когда операция руления начата, запрос на повторный запуск выводится во время t62, и целевой крутящий момент TrIS силы реакции во время снижения числа оборотов в состоянии холостого хода переключается таким образом, что он используется. Таким образом, руль 11 с меньшей вероятностью должен вращаться, и угол θs поворота при рулении постепенно изменяется. Кроме того, целевой крутящий момент TrIS силы реакции задается на основе, по меньшей мере, одного из сопротивления пружины в зависимости от угла θs поворота при рулении и вязкостного сопротивления в зависимости от скорости θs' изменения угла поворота при рулении. Следовательно, можно получать приятное ощущение при выполнении действий. [0089] Во время t63, когда угол θs поворота при рулении достигает максимального угла θmax поворота при рулении (определяется как "Нет" на этапе S110), муфта 19 зацеплена (этап S112), и в силу этого угол θs поворота при рулении практически не превышает максимальный угол θmax поворота при рулении и останавливается при практически максимальном углу поворота при рулении. Когда повторный запуск двигателя 91 завершается (определяется как "Да" на этапе S109) во время t64, команда расцепления для муфты 19 выводится (этап S114), чтобы возвращаться к обычному рулению по проводам. Во время t65 завершается расцепление муфты 19 (определяется как "Да" на этапе S113), флаг fs переключения задается равным 3 (этап S119). Таким образом, модуль 25 переключения силы реакции переключает целевой крутящий момент силы реакции, который должен выводиться, с целевого реактивного крутящего момента TrIS на обычный крутящий момент TrN силы реакции, и в силу этого обычная сила реакции при рулении повышается. Кроме того, модуль 44 переключения значений команд управления углом поворота переключает целевой угол поворота, который должен выводиться, с предыдущего значения θw*(n-1) угла поворота на обычный угол θwN поворота. [0090] Здесь управление углом поворота выполняется с тем, чтобы получать угол θw поворота, соответствующий углу θs поворота при рулении. Управление углом поворота выполняется медленно с тем, чтобы обеспечивать предварительно определенное время TF постепенного увеличения. Следовательно, можно подавлять внезапное повышение в токе при повороте командуют и внезапное изменение угла θw поворота. Таким образом, можно подавлять раскачивание кузова транспортного средства и формирование анормального шума. Кроме того, даже когда зазор является большим, поскольку угол θw поворота скорректирован в пределах предварительно определенного времени TF постепенного увеличения, можно более плавно восстанавливать надлежащий угол θw поворота. Когда время TF постепенного увеличения истекает (определено в качестве "Да" на этапе S117) во время t66, поскольку угол θw поворота, соответствующий углу θs поворота при рулении, получается, флаг fs переключения задается равным 0 (этап S120). Таким образом, можно возвращаться к обычному рулению по проводам и достигать намеченных характеристик руления. Выше приведено описание третьего примера работы. [0091] Модификация В настоящем варианте осуществления, предусмотрено два электромотора, включающих в себя первый поворотный электромотор M1 и второй поворотный электромотор M2, в качестве электромоторов, обеспечивающих движущую силу выходному поворотному механизму StOUT. Настоящее раскрытие не ограничено этим и может включать в себя только один электромотор. Таким образом, посредством сокращения числа электромоторов для обеспечения движущей силы выходному поворотному механизму StOUT можно сокращать число компонентов. В настоящем варианте осуществления, когда скорость транспортного средства становится равной 0 км/ч, т.е. транспортное средство остановлено, разрешается автоматическая остановка (снижение числа оборотов в состоянии холостого хода) двигателя 91. Настоящее раскрытие не ограничено этим. Например, снижение числа оборотов в состоянии холостого хода двигателя 91 может разрешаться, когда тормоз включен, и скорость транспортного средства, например, не превышает 7 км/ч. Иными словами, настоящий вариант осуществления может применяться в случае, если снижение числа оборотов в состоянии холостого хода активируется, даже если транспортное средство не остановлено полностью, другими словами, до того, как транспортное средство останавливается. Следует отметить, что в случае, если снижение числа оборотов в состоянии холостого хода разрешается до того, как транспортное средство останавливается, двигатель 91 повторно запускается во время активации акселератора, даже если транспортное средство не остановлено. В настоящем варианте осуществления электромотор используется в качестве поворотного актуатора или актуатора силы реакции. Настоящее раскрытие не ограничено этим. Иными словами, может использоваться любой приводной элемент, такой как соленоид или силовой цилиндр, выполненный с возможностью обеспечения выходного поворотного механизма StOUT вращающей силой или выполненный с возможностью обеспечения входного рулевого механизма StIN силой реакции при рулении. [0092] В вышеприведенном описании входной рулевой механизм StIN соответствует "механизму рулевого управления", выходной поворотный механизм StOUT соответствует "поворотному механизму", рулевой вал 12 соответствует "входному валу", и вал 18 первой шестерни соответствует "выходному валу". Кроме того, первый поворотный электромотор M1 и второй поворотный электромотор M2 соответствуют "поворотному актуатору", первый контроллер 71 поворота, второй контроллер 72 поворота и контроллер 73 силы реакции соответствуют "модулю управления рулением", и контроллер 81 двигателя соответствует "модулю управления снижением числа оборотов в состоянии холостого хода". [0093] Преимущества Далее описываются преимущества существенной части первого варианта осуществления. (1) Устройство управления рулением согласно настоящему варианту осуществления используется в транспортном средстве, причем транспортное средство включает в себя двигатель 91 и контроллер 81 двигателя, выполненный с возможностью прекращать работу двигателя 91 на холостом ходу, когда предварительно определенное условие удовлетворяется, и повторно запускать двигатель 91, когда транспортное средство начинает движение. Предусмотрены входной рулевой механизм StIN с рулевым валом 12, допускающим вращение посредством операции руления водителем, и выходной поворотный механизм StOUT, выполненный с возможностью поворачивать колесо посредством вращения вала 18 первой шестерни. Кроме того, предусмотрены муфта 19, выполненная с возможностью соединяться и разъединяться с рулевым валом 12 и валом 18 первой шестерни, поворотные электромоторы M1 и M2, выполненные с возможностью обеспечения крутящего момента поворота выходному поворотному механизму StOUT, и двигатель 91, приводящий в движение транспортное средство. Кроме того, выполняется обработка управления рулением по проводам. При обработке управления рулением по проводам муфта 19 расцепляется, и управление приведением в действие поворотных электромоторов M1 и M2 выполняется, когда двигатель 91 находится в рабочем состоянии, и муфта 19 зацепляется, и управление приведением в действие поворотных электромоторов M1 и M2 прекращается, когда двигатель 91 находится в остановленном состоянии. После этого, когда контроллер 81 двигателя прекращает работу двигателя 91 на холостом ходу, расцепленное состояние муфты 19 поддерживается. Таким образом, поскольку расцепленное состояние муфты 19 поддерживается, когда работа двигателя 91 на холостом ходу прекращается посредством функции снижения числа оборотов в состоянии холостого хода, можно подавлять звук при работе, вызываемый при зацеплении муфты 19. Следовательно, можно способствовать большей тишине в салоне транспортного средства в режиме снижения числа оборотов в состоянии холостого хода. [0094] (2) В устройстве управления рулением согласно настоящему варианту осуществления, максимальный угол θmax поворота при рулении задается как угол θs поворота при рулении, соответствующий максимальному углу θw поворота, заданному конструктивно. После этого, когда угол θs поворота при рулении достигает максимального угла θmax поворота при рулении, в то время как контроллер 81 двигателя прекращает работу двигателя 91 на холостом ходу, муфта 19 зацепляется. Таким образом, посредством зацепления муфты 19, когда угол θs поворота при рулении достигает максимального угла θmax поворота при рулении, можно не допускать увеличения угла θs поворота при рулении таким образом, что он превышает максимальный угол θmax поворота при рулении. Таким образом, можно подавлять потребление мощности или перегрев вследствие перегрузки электромотора 51 для формирования силы реакции и получать приятное ощущение при выполнении действий посредством уведомления водителя в отношении рулевой тяги (достижения концевой опоры). [0095] (3) Способ управления рулением согласно варианту осуществления применяется к транспортному средству, причем транспортное средство включает в себя функцию снижения числа оборотов в состоянии холостого хода прекращения работы двигателя 91 на холостом ходу, когда предварительно определенное условие удовлетворяется, и повторного запуска двигателя 91, когда транспортное средство начинает движение. Далее, муфта 19 обеспечивается между входным рулевым механизмом StIN с рулевым валом 12, допускающим вращение посредством операции руления водителем, и выходным поворотным механизмом StOUT, выполненным с возможностью поворачивать колесо посредством вращения вала 18 первой шестерни. Муфта 19 допускает соединение и разъединение рулевого вала 12 и вала 18 первой шестерни. Кроме того, предусмотрены поворотные электромоторы M1 и M2, выполненные с возможностью обеспечения крутящего момента поворота выходному поворотному механизму StOUT. Кроме того, муфта 19 расцепляется, и управление приведением в действие поворотных электромоторов M1 и M2 выполняется, когда двигатель 91 находится в рабочем состоянии, и муфта 19 зацепляется, и управление приведением в действие поворотных электромоторов M1 и M2 прекращается, когда двигатель 91 находится в остановленном состоянии. Кроме того, когда двигатель 91, который находится в рабочем состоянии, останавливается посредством функции снижения числа оборотов в состоянии холостого хода, расцепленное состояние муфты 19 поддерживается. Таким образом, поскольку расцепленное состояние муфты 19 поддерживается, когда работа двигателя 91 на холостом ходу прекращается посредством функции снижения числа оборотов в состоянии холостого хода, можно подавлять звук при работе, вызываемый при зацеплении муфты 19. Следовательно, можно способствовать большей тишине в салоне транспортного средства в режиме снижения числа оборотов в состоянии холостого хода. [0096] (4) Устройство управления рулением согласно настоящему варианту осуществления используется в транспортном средстве, причем транспортное средство включает в себя двигатель 91 и контроллер 81 двигателя, выполненный с возможностью прекращать работу двигателя 91 на холостом ходу, когда предварительно определенное условие удовлетворяется, и повторно запускать двигатель 91, когда транспортное средство начинает движение. Предусмотрены входной рулевой механизм StIN с рулевым валом 12, допускающим вращение посредством операции руления водителем, и выходной поворотный механизм StOUT, выполненный с возможностью поворачивать колесо посредством вращения вала 18 первой шестерни. Кроме того, предусмотрены муфта 19, выполненная с возможностью соединяться и разъединяться с рулевым валом 12 и валом 18 первой шестерни, поворотные электромоторы M1 и M2, выполненные с возможностью обеспечения крутящего момента поворота выходному поворотному механизму StOUT, и электромотор 51 для формирования силы реакции, выполненный с возможностью обеспечения силы реакции при рулении входному рулевому механизму StIN. Кроме того, выполняется обработка управления рулением по проводам. При обработке управления рулением по проводам муфта 19 расцепляется, и выполняется управление приведением в действие поворотных электромоторов M1 и M2 и электромотора 51 для формирования силы реакции. После этого, когда контроллер 81 двигателя прекращает работу двигателя 91 на холостом ходу, поддерживается расцепленное состояние муфты 19, и ограничивается приведение в действие поворотных электромоторов M1 и M2 и приведение в действие электромотора 51 для формирования силы реакции. Таким образом, когда работа двигателя 91 на холостом ходу прекращается посредством функции снижения числа оборотов в состоянии холостого хода, ограничивается приведение в действие поворотных электромоторов M1 и M2 и приведение в действие электромотора 51 для формирования силы реакции. Таким образом, можно подавлять потребление мощности. Следовательно, можно подавлять падение напряжения в аккумуляторе 95 в режиме снижения числа оборотов в состоянии холостого хода. [0097] (5) В устройстве управления рулением согласно настоящему варианту осуществления, приведение в действие поворотных электромоторов M1 и M2 ограничивается более значительно, чем приведение в действие электромотора 51 для формирования силы реакции. Таким образом, посредством приоритезации управления силой реакции при рулении над управлением углом поворота с тем, чтобы поддерживать умеренную силу реакции при рулении, можно подавлять ухудшение ощущения при выполнении действий. (6) В устройстве управления рулением согласно настоящему варианту осуществления отменено ограничение приведения в действие поворотных электромоторов M1 и M2 и приведения в действие электромотора 51 для формирования силы реакции, когда контроллер 81 двигателя повторно запускает двигатель 91. Таким образом, когда двигатель 91 повторно запускается, не возникает проблемы падения напряжения аккумулятора 95. Таким образом, можно немедленно отменять ограничение руления по проводам, чтобы получать приятное ощущение при выполнении действий снова. (7) В устройстве управления рулением согласно настоящему варианту осуществления, отменено ограничение приведения в действие поворотных электромоторов M1 и M2 и приведения в действие электромотора 51 для формирования силы реакции, когда транспортное средство начинает движение, в то время как контроллер 81 двигателя прекращает работу двигателя 91 на холостом ходу. Когда транспортное средство начинает движение, посредством возвращения к обычному рулению по проводам немедленно таким образом, чтобы обеспечивать рабочие характеристики управления транспортного средства, можно подавлять то, что водитель испытывает некомфортное ощущение. [0098] (8) Способ управления рулением согласно варианту осуществления применяется к транспортному средству, причем транспортное средство включает в себя функцию снижения числа оборотов в состоянии холостого хода прекращения работы двигателя 91 на холостом ходу, когда предварительно определенное условие удовлетворяется, и повторного запуска двигателя 91, когда транспортное средство начинает движение. Далее, муфта 19 обеспечивается между входным рулевым механизмом StIN с рулевым валом 12, допускающим вращение посредством операции руления водителем, и выходным поворотным механизмом StOUT, выполненным с возможностью поворачивать колесо посредством вращения вала 18 первой шестерни. Муфта 19 допускает соединение и разъединение рулевого вала 12 и вала 18 первой шестерни. Кроме того, предусмотрены поворотные электромоторы M1 и M2, выполненные с возможностью обеспечения крутящего момента поворота выходному поворотному механизму StOUT, а также электромотор 51 для формирования силы реакции, выполненный с возможностью обеспечения силы реакции при рулении входному рулевому механизму StIN. Муфта 19 расцепляется, и выполняется управление приведением в действие поворотных электромоторов M1 и M2 и электромотора 51 для формирования силы реакции. После этого, когда работа двигателя 91 на холостом ходу прекращается посредством функции снижения числа оборотов в состоянии холостого хода, поддерживается расцепленное состояние муфты 19, и ограничивается приведение в действие поворотных электромоторов M1 и M2 и приведение в действие электромотора 51 для формирования силы реакции. Таким образом, когда работа двигателя 91 на холостом ходу прекращается посредством функции снижения числа оборотов в состоянии холостого хода, ограничивается приведение в действие поворотных электромоторов M1 и M2 и приведение в действие электромотора 51 для формирования силы реакции. Таким образом, можно подавлять потребление мощности. Следовательно, можно подавлять падение напряжения в аккумуляторе 95 в режиме снижения числа оборотов в состоянии холостого хода. [0099] (9) Устройство управления рулением согласно настоящему варианту осуществления используется в транспортном средстве, причем транспортное средство включает в себя двигатель 91 и контроллер 81 двигателя, выполненный с возможностью прекращать работу двигателя 91 на холостом ходу, когда предварительно определенное условие удовлетворяется, и повторно запускать двигатель 91, когда транспортное средство начинает движение. Предусмотрены входной рулевой механизм StIN с рулевым валом 12, допускающим вращение посредством операции руления водителем, и выходной поворотный механизм StOUT, выполненный с возможностью поворачивать колесо посредством вращения вала 18 первой шестерни. Кроме того, предусмотрены муфта 19, выполненная с возможностью соединяться и разъединяться с рулевым валом 12 и валом 18 первой шестерни, поворотные электромоторы M1 и M2, выполненные с возможностью обеспечения крутящего момента поворота выходному поворотному механизму StOUT, и электромотор 51 для формирования силы реакции, выполненный с возможностью обеспечения силы реакции при рулении входному рулевому механизму StIN. Кроме того, выполняется обработка управления рулением по проводам. При обработке управления рулением по проводам муфта 19 расцепляется, и выполняется управление приведением в действие поворотных электромоторов M1 и M2 и электромотора 51 для формирования силы реакции. После этого, когда контроллер 81 двигателя прекращает работу двигателя 91 на холостом ходу, поддерживается расцепленное состояние муфты 19, и приведение в действие поворотных электромоторов M1 и M2 ограничивается, и приведение в действие электромотора 51 для формирования силы реакции ограничивается, с тем чтобы ограничивать силу реакции при рулении в диапазоне, позволяющем не допускать свободного проворачивания рулевого вала 12, даже когда водитель снимает руку. Таким образом, когда работа двигателя 91 на холостом ходу прекращается посредством функции снижения числа оборотов в состоянии холостого хода, посредством ограничения силы реакции при рулении в диапазоне, позволяющем не допускать свободного проворачивания рулевого вала 12, даже когда водитель снимает руку, можно подавлять потребление мощности. Таким образом, можно подавлять падение напряжения аккумулятора 95 в режиме снижения числа оборотов в состоянии холостого хода. Кроме того, поскольку сила реакции при рулении чрезмерно не ограничивается, можно подавлять ухудшение ощущения при выполнении действий. [0100] (10) В устройстве управления рулением согласно настоящему варианту осуществления, сила реакции при рулении задается на основе, по меньшей мере, одного из сопротивления пружины в зависимости от угла θs поворота при рулении и вязкостного сопротивления в зависимости от скорости θs' изменения угла поворота при рулении. Таким образом, посредством задания силы реакции при рулении на основе, по меньшей мере, одного из сопротивления пружины в зависимости от угла θs поворота при рулении и вязкостного сопротивления в зависимости от скорости θs' изменения угла поворота при рулении, можно получать приятное ощущение при выполнении действий. (11) В устройстве управления рулением согласно настоящему варианту осуществления, поддерживается угол θw поворота в то время, когда контроллер 81 двигателя прекращает работу двигателя 91 на холостом ходу. Таким образом, посредством поддержания угла θw поворота во время прекращения работы двигателя 91 на холостом ходу, можно надежно подавлять потребление мощности в поворотных электромоторах M1 и M2. [0101] (12) Способ управления рулением согласно варианту осуществления применяется к транспортному средству, причем транспортное средство включает в себя функцию снижения числа оборотов в состоянии холостого хода прекращения работы двигателя 91 на холостом ходу, когда предварительно определенное условие удовлетворяется, и повторного запуска двигателя 91, когда транспортное средство начинает движение. Далее, муфта 19 обеспечивается между входным рулевым механизмом StIN с рулевым валом 12, допускающим вращение посредством операции руления водителем, и выходным поворотным механизмом StOUT, выполненным с возможностью поворачивать колесо посредством вращения вала 18 первой шестерни. Муфта 19 допускает соединение и разъединение рулевого вала 12 и вала 18 первой шестерни. Кроме того, предусмотрены поворотные электромоторы M1 и M2, выполненные с возможностью обеспечения крутящего момента поворота выходному поворотному механизму StOUT, а также электромотор 51 для формирования силы реакции, выполненный с возможностью обеспечения силы реакции при рулении входному рулевому механизму StIN. Муфта 19 расцепляется, и выполняется управление приведением в действие поворотных электромоторов M1 и M2 и электромотора 51 для формирования силы реакции. После этого, когда работа двигателя 91 на холостом ходу прекращается посредством функции снижения числа оборотов в состоянии холостого хода, поддерживается расцепленное состояние муфты 19, и приведение в действие поворотных электромоторов M1 и M2 ограничивается, и приведение в действие электромотора 51 для формирования силы реакции ограничивается, с тем чтобы ограничивать силу реакции при рулении в диапазоне, позволяющем не допускать свободного проворачивания рулевого вала 12, даже когда водитель снимает руку. Таким образом, когда работа двигателя 91 на холостом ходу прекращается посредством функции снижения числа оборотов в состоянии холостого хода, посредством ограничения силы реакции при рулении в диапазоне, позволяющем не допускать свободного проворачивания рулевого вала 12, даже когда водитель снимает руку, можно подавлять потребление мощности. Таким образом, можно подавлять падение напряжения аккумулятора 95 в режиме снижения числа оборотов в состоянии холостого хода. Кроме того, поскольку сила реакции при рулении чрезмерно не ограничивается, можно подавлять ухудшение ощущения при выполнении действий. [0102] (13) Устройство управления рулением согласно настоящему варианту осуществления используется в транспортном средстве, причем транспортное средство включает в себя двигатель 91 и контроллер 81 двигателя, выполненный с возможностью прекращать работу двигателя 91 на холостом ходу, когда предварительно определенное условие удовлетворяется, и повторно запускать двигатель 91, когда транспортное средство начинает движение. Предусмотрены входной рулевой механизм StIN с рулевым валом 12, допускающим вращение посредством операции руления водителем, и выходной поворотный механизм StOUT, выполненный с возможностью поворачивать колесо посредством вращения вала 18 первой шестерни. Кроме того, предусмотрены муфта 19, выполненная с возможностью соединяться и разъединяться с рулевым валом 12 и валом 18 первой шестерни, поворотные электромоторы M1 и M2, выполненные с возможностью обеспечения крутящего момента поворота выходному поворотному механизму StOUT, и электромотор 51 для формирования силы реакции, выполненный с возможностью обеспечения силы реакции при рулении входному рулевому механизму StIN. Кроме того, выполняется обработка управления рулением по проводам. При обработке управления рулением по проводам муфта 19 расцепляется, и выполняется управление приведением в действие поворотных электромоторов M1 и M2 и электромотора 51 для формирования силы реакции. После этого, когда контроллер 81 двигателя прекращает работу двигателя 91 на холостом ходу, поддерживается расцепленное состояние муфты 19, и приведение в действие поворотных электромоторов M1 и M2 ограничивается, с тем чтобы поддерживать угол θw поворота во время прекращения работы двигателя 91 на холостом ходу, и ограничивается приведение в действие электромотора 51 для формирования силы реакции. Кроме того, когда контроллер 81 двигателя повторно запускает двигатель 91, отменяется ограничение приведения в действие поворотных электромоторов M1 и M2 и приведения в действие электромотора 51 для формирования силы реакции. В случае если угол θs поворота при рулении изменен в то время, когда работа двигателя 91 на холостом ходу прекращена, и в силу этого зазор формируется между углом θw поворота и углом θs поворота при рулении, поворотные электромоторы M1 и M2 приводятся в действие, с тем чтобы обеспечивать предварительно определенное время на исключение зазора. Таким образом, когда угол θs поворота при рулении изменен в то время, когда работа двигателя 91 на холостом ходу прекращена посредством функции снижения числа оборотов в состоянии холостого хода, и в силу этого зазор формируется между углом θw поворота и углом θs поворота при рулении, поворотные электромоторы M1 и M2 приводятся в действие, с тем чтобы обеспечивать предварительно определенное время TF постепенного увеличения на исключение зазора. Следовательно, когда зазор является небольшим, угол θw поворота медленно корректируется. Даже когда зазор является большим, поскольку угол θw поворота скорректирован в пределах предварительно определенного времени TF постепенного увеличения, можно более плавно восстанавливать надлежащий угол поворота. [0103] (14) Способ управления рулением согласно варианту осуществления применяется к транспортному средству, причем транспортное средство включает в себя функцию снижения числа оборотов в состоянии холостого хода прекращения работы двигателя 91 на холостом ходу, когда предварительно определенное условие удовлетворяется, и повторного запуска двигателя 91, когда транспортное средство начинает движение. Далее, муфта 19 обеспечивается между входным рулевым механизмом StIN с рулевым валом 12, допускающим вращение посредством операции руления водителем, и выходным поворотным механизмом StOUT, выполненным с возможностью поворачивать колесо посредством вращения вала 18 первой шестерни. Муфта 19 допускает соединение и разъединение рулевого вала 12 и вала 18 первой шестерни. Кроме того, предусмотрены поворотные электромоторы M1 и M2, выполненные с возможностью обеспечения крутящего момента поворота выходному поворотному механизму StOUT, а также электромотор 51 для формирования силы реакции, выполненный с возможностью обеспечения силы реакции при рулении входному рулевому механизму StIN. Муфта 19 расцепляется, и выполняется управление приведением в действие поворотных электромоторов M1 и M2 и электромотора 51 для формирования силы реакции. После этого, когда работа двигателя 91 на холостом ходу прекращается посредством функции снижения числа оборотов в состоянии холостого хода, поддерживается расцепленное состояние муфты 19, и приведение в действие поворотных электромоторов M1 и M2 ограничивается, с тем чтобы поддерживать угол θw поворота во время прекращения работы двигателя 91 на холостом ходу, и ограничивается приведение в действие электромотора 51 для формирования силы реакции. Кроме того, при повторном запуске двигателя 91 посредством функции снижения числа оборотов в состоянии холостого хода, отменяется ограничение приведения в действие поворотных электромоторов M1 и M2 и приведения в действие электромотора 51 для формирования силы реакции. В случае если угол θs поворота при рулении изменен в то время, когда работа двигателя 91 на холостом ходу прекращена, и в силу этого зазор формируется между углом θw поворота и углом θs поворота при рулении, поворотные электромоторы M1 и M2 приводятся в действие, с тем чтобы обеспечивать предварительно определенное время на исключение зазора. Таким образом, когда угол θs поворота при рулении изменен в то время, когда работа двигателя 91 на холостом ходу прекращена, посредством функции снижения числа оборотов в состоянии холостого хода, и в силу этого зазор формируется между углом θw поворота и углом θs поворота при рулении, поворотные электромоторы M1 и M2 приводятся в действие, с тем чтобы обеспечивать предварительно определенное время TF постепенного увеличения на исключение зазора. Следовательно, когда зазор является небольшим, угол θw поворота медленно корректируется. Даже когда зазор является большим, поскольку угол θw поворота скорректирован в пределах предварительно определенного времени TF постепенного увеличения, можно более плавно восстанавливать надлежащий угол поворота. [0104] (15) В устройстве управления рулением согласно настоящему варианту осуществления работа двигателя 91 на холостом ходу прекращается во время остановки транспортного средства. Посредством прекращения работы двигателя 91 на холостом ходу во время остановки транспортного средства таким способом, можно уменьшать выбросы выхлопных газов и повышать эффективность использования топлива. (16) В устройстве управления рулением согласно настоящему варианту осуществления поворотный актуатор включает в себя электромотор. Посредством использования электромотора в качестве поворотного актуатора для обеспечения крутящего момента поворота выходному поворотному механизму StOUT таким образом, можно легко управлять поворотом колеса. [0105] (17) В устройстве управления рулением согласно настоящему варианту осуществления, когда двигатель 91 находится в рабочем состоянии, муфта 19 разъединена, и выполняется управление приведением в действие поворотных электромоторов M1 и M2. Кроме того, когда муфта 19 находится в застопоренном состоянии, муфта 19 зацепляется, и управление приведением в действие поворотных электромоторов M1 и M2 прекращается. Посредством управления приведением в действие поворотных электромоторов M1 и M2 в состоянии, в котором муфта 19 разъединена, когда двигатель 91 находится в рабочем состоянии таким способом, можно достигать намеченных характеристик руления в качестве функции руления по проводам. Кроме того, посредством прекращения управления приведением в действие поворотных электромоторов M1 и M2 в состоянии, в котором муфта 19 зацепляется, когда муфта 19 находится в застопоренном состоянии, можно подавлять зазор в соотношении между углом поворота и углом поворота при рулении. (18) В устройстве управления рулением согласно настоящему варианту осуществления, актуатор силы реакции включает в себя электромотор. Посредством использования электромотора в качестве актуатора силы реакции для обеспечения силы реакции при рулении входному рулевому механизму StIN таким способом, можно легко управлять силой реакции при рулении. [0106] Данная заявка испрашивает приоритет заявки на патент Японии № 2013-003880 (поданной 11 января 2013 года) и заявки на патент Японии № 2013-003881 (поданной 11 января 2013 года), содержимое которых полностью включено в данный документ путем ссылки. Хотя настоящее изобретение описано в отношении точного числа вариантов осуществления, объем настоящего изобретения не ограничен этим, и модификации вариантов осуществления на основе вышеописанного раскрытия являются очевидными для специалистов в данной области техники. Список ссылочных позиций [0107] 11 - руль 12 - рулевой вал 13L и 13R - колесо 14 - рычаг поворотного кулака 15 - поперечная рулевая тяга 16 - вал зубчатой рейки 17 - ведущая шестерня 18 - вал первой шестерни 19 - муфта StIN - входной рулевой механизм StOUT - выходной поворотный механизм 31 - шестерня зубчатой рейки 32 - червячная шестерня M1 - первый поворотный электромотор 33 - круговой датчик позиции 34 - датчик крутящего момента A1 - первый актуатор 35 - ведущая шестерня 36 - вал второй шестерни 37 - шестерня зубчатой рейки 38 - червячная шестерня M2 - второй поворотный электромотор 39 - круговой датчик позиции A2 - второй актуатор 51 - электромотор для формирования силы реакции 52 - круговой датчик позиции 53 - датчик угла поворота при рулении 71 - первый контроллер поворота 72 - второй контроллер поворота 73 - контроллер силы реакции 74 - линия связи 75 - линия связи 81 - контроллер двигателя 91 - двигатель 92 - стартерный электромотор 94 - генератор переменного тока 95 - аккумулятор 21 - модуль управления IS-переключением 22 - модуль управления муфтой 23 - модуль вычисления силы реакции 24 - модуль вычисления силы IS-реакции 25 - модуль переключения силы реакции 26 - модуль управления силой реакции 27 - процессор задания ограничений 41 - модуль вычисления значения команды управления углом поворота 42 - модуль хранения предыдущих значений 43 - модуль вычисления значений команд управления углом поворота при открытой муфте 44 - модуль переключения значений команд управления углом поворота 45 - процессор управления постепенным увеличением 46 - модуль сервоуправления углами 47 - процессор задания ограничений
Реферат
Группа изобретений относится к устройству и способу управления рулением. Настоящее раскрытие применяется к транспортному средству, включающему в себя функцию снижения числа оборотов в состоянии холостого хода прекращения работы двигателя на холостом ходу и повторного запуска двигателя, когда транспортное средство начинает движение. Затем обработка управления рулением по проводам выполняется, с тем чтобы расцеплять муфту 19 и управлять приведением в действие поворотных электромоторов M1, M2. Когда работа двигателя на холостом ходу прекращается посредством функции снижения числа оборотов в состоянии холостого хода, поддерживается расцепленное состояние муфты 19 и ограничивается приведение в действие поворотных электромоторов M1, M2. Обеспечивается подавление падения напряжения аккумулятора в режиме снижения числа оборотов в состоянии холостого хода. 2 н. и 10 з.п. ф-лы, 10 ил.
Комментарии