Система контроля целостности состава - RU2614158C1
Код документа: RU2614158C1
Чертежи
Описание
Изобретение относится к области железнодорожной автоматики и может быть использовано в составе автоматизированных комплексов управления и обеспечения безопасности движения поездов.
Магистральные участки дорог оснащаются системами интервального регулирования, обеспечивающими безопасность движения поездов по перегону с помощью автоблокировки. В то же время имеются малодеятельные участки дорог, на которых ввиду малой интенсивности движения применение систем интервального регулирования, основанных на использовании большого количества напольной аппаратуры, нецелесообразно. Эти участки обычно оборудуют полуавтоматической блокировкой. Как при автоблокировке, так и при полуавтоматической блокировке важной функцией является определение того, что поезд проследовал определенный участок пути в полном составе. При автоблокировке эта функция, в основном, реализуется с помощью рельсовых цепей, а при полуавтоматической блокировке, в основном, без рельсовых цепей, либо посредством счета осей в составе поезда, либо с помощью точечного контроля проследования последнего вагона состава поезда мимо контрольного пункта, расположенного перед станцией приема поезда. Нарушения в правильной работе перегонных устройств определения свободности путевых участков из-за сбоев от помех или нарушения их правильной регулировки или отказов приводят к опасным ситуациям и задержкам в движении поездов.
Для контроля проследования последнего вагона состава поезда может быть использован пассивный датчик, закрепляемый на хвосте сформированного поезда, и напольный активный датчик, монтируемый в контрольной точке пути. В качестве пассивного датчика используется индуктор (см. кн. Устинский А.А. и др. Автоматика, телемеханика и связь на железнодорожном транспорте. - М.: Транспорт, 1985, с. 17-23, 139-140). Однако индуктор, изготавливаемый из металла, имеет значительную массу, что затрудняет обслуживание поездов.
Известен также контроль проследования последнего вагона посредством считывания кодовых меток радиочастотной идентификации, установленных на различных элементах конструкции вагона (RU 2191127, B61L 25/02, 20.10.02). Однако для этого требуется оборудовать большое количество такими метками, поскольку заранее неизвестно, какой из вагонов будет в конце состава поезда. Кроме того, имеет место недостаток, связанный с приемом мешающих радиосигналов, отраженных от вагонов составов на соседних путях.
Известен также контроль проследования поезда в полном составе посредством контроля хвостового оборудования состава, устанавливаемого непосредственно на самом поезде, с помощью блока хвостового вагона, имеющего связь с оборудованием в кабине машиниста для последующей передачи информации о целостности состава поезда по радиоканалу в кабину локомотива, а затем на пост диспетчерского управления движением поездов (RU 2411147, В61С 17/12, 10.02.11). В пассажирских поездах контроль целостности осуществляется по линейным проводам электропневматического тормоза и по тормозной магистрали. В грузовых - только по наличию давления в тормозной магистрали (пропадание давления означает обрыв) (см. Смагин Б.В. Автоматические тормоза и безопасность движения поездов. Учебное пособие. - М.: РГОТУПС, 1997 г., с. 11). Главным недостатком таких систем является необходимость установки сложного оборудования в хвостовых вагонах состава и линий связи с ним, что затрудняет и удорожает процесс эксплуатации. В настоящее время поезда, особенно грузовые, слабо оснащены автономными устройствами проверки целостности состава.
Информация об обрыве состава поезда, обнаруженного на самом поезде, по падению давления в тормозной магистрали передается на центральный пост управления движением с большим запаздыванием из-за инерционности процессов изменения давления в тормозной магистрали и задержек в оперативной радиосвязи центрального поста с поездами.
Параллельно с перечисленными системами контроля проследования поезда в полном составе в настоящее время для других целей широко применяются устройства для автоматического управления торможением (см. Никифоров Б.Д., Головин В.И., Кутыев Ю.Г. Автоматизация управления тормозами поездов. _ М.: Транспорт, 1985 г., патент RU 2283786, B61L 8/172, 20.09.06). Эти устройства широко распространены на железной дороге. Близкое расположение аппаратуры систем автоматизированного управления торможением к аппаратуре систем контроля проследования поезда в полном составе создает предпосылки для упрощения и повышения надежности аппаратуры систем контроля проследования поезда в полном составе за счет дублирования и/или выполнения части функций этой аппаратуры в аппаратуре системы автоматизированного управления торможением.
Наиболее близким техническим решением, которое принято в качестве прототипа, является система для контроля свободности от подвижного состава участков пути на железнодорожном перегоне, содержащая перегонные электрические рельсовые цепи и аппаратуру их контроля, размещенную на постах электрической централизации станций, ограничивающих перегон, путевые генераторы, подключенные к соответствующим шлейфам индуктивной связи, а на локомотиве выход приемника сигналов соединен с входом блока определения координат местоположения генераторов, выход которого соединен с первым входом блока формирования сигнала освобождения рельсовой цепи, порт которого через межмодульный интерфейс связи соединен с портом локомотивного приемопередатчика и портом блока управления движением локомотива, второй, третий и четвертый входы блока формирования сигнала освобождении рельсовой цепи соединены соответственно с блоком электронной карты маршрута и спутниковой навигации, с блоком измерения пройденного пути и выходом устройства контроля целостности состава поезда, при этом локомотивный приемопередатчик посредством цифрового радиоканала связи соединен со стационарными приемопередатчиками, размещенными на постах электрической централизации, которые связаны между собой проводной линией связи (RU 2438905, B61L 23/16, 10.01.2012).
Недостатком известной системы является относительная сложность аппаратуры, заключающаяся в необходимости использования средств определения координат местоположения генераторов, формирования сигнала освобождения рельсовой цепи, измерения пройденного пути, спутниковой навигации и устройства контроля целостности состава.
Технический результат изобретения заключается в упрощении аппаратуры системы контроля целостности состава, повышении уровня ее надежности и достоверности контроля.
Технический результат достигается тем, что в системе контроля целостности состава, содержащей путевые шлейфы индуктивной связи, каждый из которых подключен к соответствующему путевому генератору сигналов, а на локомотиве к входу блока бортовой аппаратуры управления поезда подключен выход бортового приемника сигналов индуктивного канала связи, вход которого соединен с бортовой приемной катушкой, согласно изобретению на локомотиве введен первый микроконтроллер со встроенным приемопередающим модулем и подключен к бортовой приемной катушке, а на хвостовом вагоне поезда установлена дополнительная бортовая приемная катушка, соединенная с входом второго микроконтроллера со встроенным приемопередающим модулем, каждый путевой генератор сигналов подключен к соответствующему путевому микроконтроллеру со встроенным приемопередающим модулем, причем путевой микроконтроллер через проводной интерфейс подключен к проводной линии связи, соединенной с портом связи блока аппаратуры центрального поста управления движением поездов, к которому подключен через упомянутую проводную линию связи путевой генератор, при этом встроенные приемопередающие модули первого и второго микроконтроллеров соединены по радиоканалу маломощной радиосвязи с встроенным приемопередающим модулем соответствующего путевого микроконтроллера в интервале времени нахождения приемных катушек, установленных соответственно на локомотиве и хвостовом вагоне, над путевым шлейфом, соединенным с путевым генератором сигналов, к которому подключен этот путевой микроконтроллер.
Предлагаемое изобретение позволяет также расширить функциональные возможности известной подсистемы типа системы автоматизированного управления торможением за счет эффективной интеграции в рамках общей системы управления движением поездов с применяемыми системами интервального регулирования движения поездов на перегонах, примыкающих к станциям, где имеется аппаратура системы автоматизированного управления торможением, в особенности с системами полуавтоматической автоблокировки. Под эффективной интеграцией здесь понимается интеграция, которая сопровождается синергетическим эффектом при объединении подсистем, выражающимся в улучшении соотношения количества и качества реализуемых общей системой управления движением поездов функций и общих аппаратурных и эксплуатационных затрат по сравнению с известными решениями. В предлагаемом техническом решении используются существующие шлейфы системы автоматизированного управления торможением и соединительные провода от напольных устройств системы автоматизированного управления торможением к центру управления для передачи выработанной в новой системе новой информации о проследовании поезда в полном составе, а также используется малогабаритное и дешевое в производстве и эксплуатации дополнительное оборудование хвостовых вагонов для грузовых поездов и еще более дешевое оборудование для электропоездов, передняя и задняя кабины управления которых уже имеют катушки системы автоматизированного управления торможением. В связи с этим небольшие дополнительные аппаратные и эксплуатационные затраты позволяют упростить перегонные системы интервального регулирования и повысить надежность их работы за счет резервирования в них функции контроля проследования поезда в полном составе.
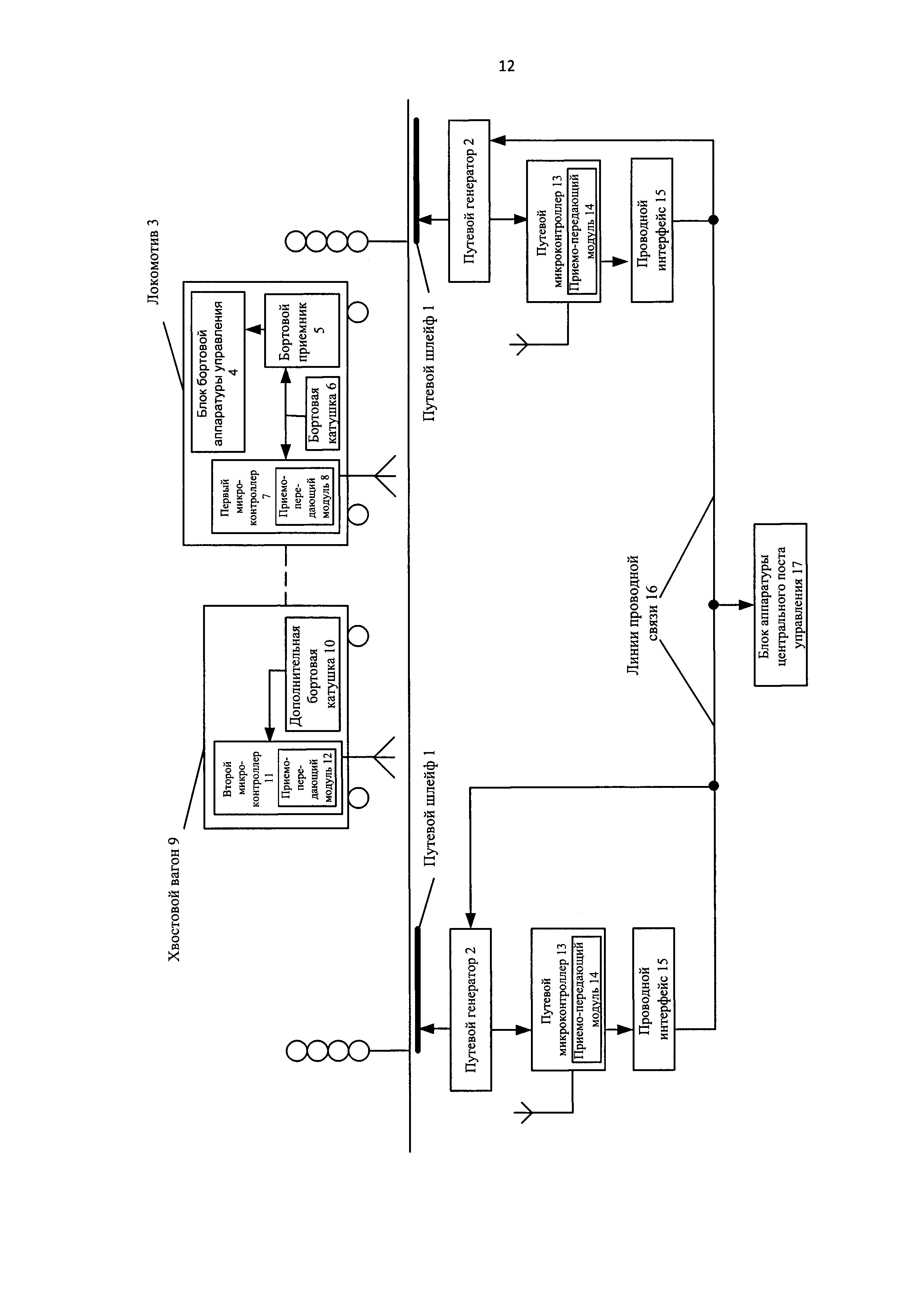
На чертеже приведена схема системы контроля целостности состава.
Система контроля целостности состава содержит путевые шлейфы 1 индуктивной связи, каждый из которых подключен к соответствующему путевому генератору 2 сигналов, а на локомотиве 3 к входу блока 4 бортовой аппаратуры управления поезда подключен выход бортового приемника 5 сигналов индуктивного канала связи, вход которого соединен с бортовой приемной катушкой 6, на локомотиве 3 первый микроконтроллер 7 со встроенным приемопередающим модулем 8 подключен к бортовой приемной катушке 6, на хвостовом вагоне 9 поезда установлена дополнительная бортовая приемная катушка 10, соединенная с входом второго микроконтроллера 11 со встроенным приемопередающим модулем 12, каждый путевой генератор 2 сигналов подключен к соответствующему путевому микроконтроллеру 13 со встроенным приемопередающим модулем 14, причем путевой микроконтроллер 13 через проводной интерфейс 15 подключен к проводной линии 16 связи, соединенной с портом связи блока 17 аппаратуры центрального поста управления движением поездов, к которому подключен через упомянутую проводную линию 16 связи путевой генератор 2, при этом встроенные приемопередающие модули 8, 12, первого и второго микроконтроллеров 7, 11 соединены по радиоканалу маломощной радиосвязи с встроенным приемопередающим модулем 14 соответствующего путевого микроконтроллера 13 в интервале времени нахождения приемных катушек 6, 10, установленных соответственно на локомотиве 3 и хвостовом вагоне 9, над путевым шлейфом 1, соединенным с путевым генератором 2 сигналов, к которому подключен этот путевой микроконтроллер 13. Особенностью системы является применение одинаковых микроконтроллеров как для локомотивных, так и для путевых устройств.
Система функционирует следующим образом.
На входе станции на локомотив 3 через путевой шлейф 1 индуктивной связи передается кодовый сигнал о номере маршрута приема. В предлагаемой системе кодовый сигнал, поступающий в путевой шлейф 1, дополняется уникальным адресом для радиосвязи с соответствующим путевым микроконтроллером 13 со встроенным приемопередающим модулем 14. Этот сигнал пересылается в путевой генератор 2 из блока 17 аппаратуры центрального поста управления движением поездов. Путевой генератор 2 на входе станции формирует на основе информации из этого кодового сигнала модулированный частотный кодовый сигнал с несущими частотами около 20 кГц. Этот частотный сигнал во время прохождения бортовой приемной катушки 6 над каждым путевым шлейфом 1 индуктивной связи через образующийся временный индуктивный канал связи поступает в бортовой приемник 5 сигналов индуктивных каналов связи на локомотиве 3. Из него демодулированный сигнал поступает в блок 4 бортовой аппаратуры управления локомотивом 3. Получив сигнал от бортового приемника 5 сигналов индуктивных каналов связи, блок 4 бортовой аппаратуры управления локомотивом 3 извлекает из него информацию о номере текущего путевого шлейфа 1 и номере маршрута приема и по этим номерам извлекает из своего блока памяти данные о путевых параметрах установленного маршрута приема и адрес для радиосвязи с путевым микроконтроллером 13 со встроенным приемопередающим модулем 14, относящимся к текущему путевому шлейфу 1. Аналогично путевой генератор 2 на выходе со станции передает на локомотив 3 свою информацию. В этом случае блок 4 бортовой аппаратуры управления локомотивом 3 получает номер перегона и потом из своей памяти извлекает данные о путевых параметрах для построения кривых скорости для каждого блок участка перегона. Принятый из путевого шлейфа 1 адрес для радиосвязи с соответствующим путевым микроконтроллером 13 со встроенным приемопередающим модулем 14 используется первым микроконтроллером 7 со встроенным приемопередающим модулем 8 локомотива 3 для передачи по радиоканалу маломощной радиосвязи в этот путевой микроконтроллер 7 со встроенным приемопередающим модулем 8 радиосигнала обратной связи. Радиосигнал обратной связи содержит пакет цифровых данных с номером поезда и номером его хвостового вагона 9 и/или номером задней кабины управления в случае состава электропоезда. Также этот пакет данных содержит адрес второго микроконтроллера 11 со встроенным приемопередающим модулем 12 в конце состава поезда для последующего сеанса связи с ним данного путевого микроконтроллера 13 со встроенным приемопередающим модулем 14. Для расширения функциональных возможностей системы управления движения в этом пакете также может содержаться другая информация от локомотива 3, полезная для процесса диспетчерского управления движением поездов. Радиосигнал с пакетом данных обратной связи излучается в эфир через бортовую антенну маломощной радиосвязи в диапазоне радиочастот ISM, или аналогичном, и через радиоканал принимается расположенной на текущем малом расстоянии (примерно в пределах длины шлейфа 1) путевой антенной маломощной радиосвязи путевого микроконтроллера 13 со встроенным приемопередающим модулем 14. Принимаемый этим путевым микроконтроллером 13 радиосигнал выводит его приемопередающий модуль 14 из ждущего режима и декодируется. Данные из пакета запоминаются в оперативной памяти путевого микроконтроллера 13. Путевой микроконтроллер 13 добавляет к этой информации уникальный идентификационный номер соответствующего ему путевого шлейфа 1 индуктивной связи и через выход проводного интерфейса 15 и линию проводной связи 16 передает информацию о проследовании головы или хвоста поезда над этим путевым шлейфом 1 индуктивной связи в соответствующий блок 17 аппаратуры центрального поста управления движением поездов. Если от локомотива 3 данного поезда получена информация о том, что состав поезда следует вагонами вперед, то передаваемая информация дополняется специальным признаком того, что локомотив 3 является в данном случае последним элементом в составе поезда. Блок 17 аппаратуры центрального поста управления движением поездов регистрирует эту информацию для фиксации проследования локомотива 3 данного поезда над этим путевым шлейфом 1 индуктивной связи. Выпускаемые промышленностью программируемые микроконтроллеры со встроенными приемопередающими модулями (например, модули Texas Instruments, на основе микросхем СС2520 http://www.ti.com/lit/ds/symlink/cc2520.pdf), или аналогичные, для общепромышленного диапазона частот ISM потребляют малый ток, работают от батарейки напряжением 2-3.6 В, дешевы, малогабаритны и имеют собственный микропроцессор с последовательным интерфейсом для проводной связи. Они также имеют ждущий режим с микропотреблением тока и потребляют энергию менее 10 мВт при радиосвязи на расстоянии в несколько метров при времени радиообмена менее 0.01 сек. Это обеспечивает в модулях длительный срок службы встроенных батареек без их замены и создает также предпосылки для использования при питании модулей в хвостовых вагонах 9 только энергии сигнала, принимаемого дополнительной приемной катушкой 10 из шлейфов 1.
Частотный кодовый сигнал, принимаемый дополнительной приемной катушкой 10 в хвостовом вагоне 9, при прохождении последнего вагона состава над этим же шлейфом 1 воздействует на вход пробуждением из ждущего режима второго микроконтроллера 11 со встроенным приемопередающим модулем 12 хвостового вагона 9. Второй микроконтроллер 11 со встроенным приемопередающим модулем 12 до поступления сигнала из дополнительной приемной катушки 10 также находится в ждущем режиме с микропотреблением тока. При пробуждении второго микроконтроллера 11 он активизирует свой приемопередающий модуль 12 для посылки им широковещательного запроса на установление с ним радиосвязи путевых микроконтроллеров 13. В этом сообщении он указывает свой уникальный адрес и поэтому только один путевой микроконтроллер 13, относящийся именно к данному шлейфу 1 и хранящий со времени радиообмена с локомотивом 3 этого же поезда в своей оперативной памяти этот же адрес, откликается на этот запрос путевого микроконтроллера 13 и принимает пакет информации от второго микроконтроллера 11 с приемопередающим модулем 12 в конце состава проходящего поезда. Этот пакет информации содержит информацию об уникальных идентификационных номерах данного поезда и его хвостового вагона 9 или последней секции в случае электропоезда. Эта информация для грузового поезда заносится составителями поездов в энергонезависимую память второго микроконтроллера 11 в комплекте для каждого хвостового вагона 9 при формировании состава поезда, а на локомотиве 3 грузового поезда или электропоезда поступает в энергонезависимую память первого микроконтроллера 7 из блока 4 бортовой аппаратуры управления локомотивом 3 в соответствующей кабине управления.
Пакет информации может также содержать дополнительную информацию о составе поезда, полезную в целом для системы управления движением поездов.
Путевой микроконтроллер 13 после декодирования информации, принятой по радиоканалу, опять добавляет к ней уникальный идентификационный номер соответствующего ему путевого шлейфа 1 индуктивной связи, а затем через выход проводного интерфейса 15 и линию проводной связи 16 передает информацию о проследовании теперь уже хвоста поезда над этим путевым шлейфом 1 индуктивной связи в соответствующий блок 17 аппаратуры центрального поста управления движением поездов. Блок 17 аппаратуры центрального поста управления движением поездов регистрирует эту информацию и фиксирует проследование данного поезда в полном составе через контрольную точку пути, соответствующую координатам местоположения данного путевого шлейфа 1 индуктивной связи. Эта информация в блоке 17 аппаратуры центрального поста управления движением поездов затем используется для различных целей диспетчерского управления движением поездов. В частности, она может использоваться перегонными системами интервального регулирования движения для контроля освобождения всего перегона, при полуавтоматической блокировке, или контроля освобождения последнего блок участка перегона при автоблокировке, или контроля освобождения станционного пути при выходе поезда на перегон. Эта информация также может использоваться для точечной корректировки координат текущего местонахождения конца и начала состава поезда.
Использование новых возможностей, предоставляемых предлагаемой системой, позволяет повысить безопасность и надежность, и/или позволяет упростить аппаратуру перегонных систем интервального регулирования движения. Так, при полуавтоматической блокировке могут быть исключены из использования индукторы, имеющие значительную массу, или дополнительные напольные модули счета осей, служащие для повышения надежности в системах, использующих счет осей. При автоблокировке могут быть упрощены схемы разблокирования ложно занятых рельсовых цепей в конце перегонов. В системы идентификации составов и проверки графиков исполненного движения также может из предлагаемой системы передаваться дублирующая информация о параметрах проходящих составов. В рамках общей системы управления это обеспечивает синергетический эффект существенного улучшения параметров общей системы управления движением поездов по отношению к сравнительно малым дополнительным эксплуатационным и капитальным затратам.
В системе предусмотрена техническая диагностика. По соответствующей проводной линии связи 16 в блок 17 аппаратуры центрального поста управления движением поездов от путевого генератора 2 и путевого микроконтроллера 13 после прохождения поездов над шлейфом 1 передаются пакеты информации самодиагностики исправности блоков устройств, участвующих в определении проследования поезда в полном составе. Эта информация отображается на дисплеях обслуживающего персонала.
Возможными являются также применения упрощенных вариантов системы. Самым простым вариантом является вариант с применением на поезде только второго микроконтроллера 11 в хвостовом вагоне 9 с питанием его только от энергии сигнала, принимаемого дополнительной бортовой катушкой 10 из шлейфов 1. При этом варианте защищенность от приема ложного сигнала приемопередающим модулем 14 путевого микроконтроллера 13 может основываться на том, что уровень сигнала от микроконтроллеров другого поезда будет существенно меньше из-за большого расстояния. В основном это условие может быть выполнено на однопутных железных дорогах, когда хвост одного поезда удален от хвоста встречного поезда на большое расстояние.
Реферат
Изобретение относится к области железнодорожной автоматики и телемеханики. Система содержит установленные на локомотиве и в хвостовом вагоне комплекты, включающие в себя блок бортовой аппаратуры, микроконтроллер со встроенным приемопередающим модулем, бортовую приемную катушку и бортовой приемник. На станции расположены путевые шлейфы, на каждый из которых приходится путевой генератор, микроконтроллер со встроенным приемопередающим модулем и проводной интерфейс. Причем все проводные интерфейсы связаны с блоком аппаратуры центрального поста управления движением поездов посредством проводной линии связи. Достигается упрощение аппаратуры системы контроля целостности состава, повышение уровня ее надежности и достоверности контроля. 1 ил.
Формула
Документы, цитированные в отчёте о поиске
Способ и устройство для контроля целостности поезда
Комментарии