Способ и устройство для контроля целостности поезда - RU2556263C2
Код документа: RU2556263C2
Чертежи

Описание
Изобретение относится к способу и устройству для контроля целостности поезда. Классическим способом целостность поезда контролируется посредством счетчика осей на стороне участка пути или рельсовых кругов. При современных концепциях эксплуатации как, например, FFB (Радио Режим Движения) или ETCS (Европейская Система Управления Поездами) - Уровень 3, существует тенденция перемещения по возможности многих функций, например определения местоположения, на рельсовое транспортное средство. Также целостность поезда должна контролироваться на стороне поезда. Однако это касается, прежде всего, поездов, вагоны которых часто группируются заново, то есть, в частности, товарных поездов. В случае моторвагонных поездов, очередность вагонов или длина поезда которых очень редко изменяется, как правило, вероятность расцепления поезда настолько незначительна, что не требуется никакого дополнительного контроля.
При известном решении для установления целостности поезда используется соединение между локомотивом и последним вагоном. Это соединение может устанавливаться, например, электрически, пневматически, с использованием радиосвязи или оптически. Часто используется специальное устройство EOTD (устройство «конца поезда»). Если прерывается соединение между локомотивом и EOTD, детектируется расцепление поезда. Недостатком здесь являются, прежде всего, значительные затраты, в частности, на проектирование, так как должна осуществляться идентификация в явном виде между локомотивом и EOTD. Также возникают проблемы в отношении функциональной совместимости, потерь и администрирования.
Другое решение основывается на том, что все вагоны оснащены модулем TIM (модуль проверки целостности поезда). При этом речь идет о модулях, осуществляющих связь друг с другом беспроводным способом на коротких расстояниях. Недостатком и здесь являются значительные затраты в соединении с проблемами функциональной совместимости.
В основе изобретения лежит задача создать способ и устройство для контроля целостности поезда, которые отличаются незначительными затратами и улучшенной надежностью и готовностью оборудования.
В соответствии со способом эта задача решается тем, что расположенные по меньшей мере в части вагонов поезда модули проверки целостности поезда (TIM) на основе цифровой карты распознают области маневрирования, что TIM при выезде из первой области маневрирования на фазе калибровки обмениваются данными и на основе заданных критериев стабильности данных распознают свою принадлежность к выезжающему поезду и что TIM до въезда во вторую область маневрирования циклически обмениваются сенсорными данными, в частности, относительно скорости, положения и направления движения, причем TIM на основе заданных логических критериев распознают расцепление поезда и при необходимости передают сенсорные данные на центральный пункт управления эксплуатацией.
Для этого в соответствии с устройством предусмотрено, что в по меньшей мере части вагонов поезда установлены модули проверки целостности поезда (TIM), причем TIM имеют цифровую карту с областями маневрирования, средства коммуникации в ближней зоне для взаимного обмена данными, а также средства коммуникации дальней зоны для передачи данных на центральный пункт управления эксплуатацией и соединены с по меньшей мере одним сенсором для регистрации специфических для TIM данных, в частности, скорости, положения и направления движения.
Прежде всего TIM оснащаются цифровой картой, которая содержит области, в которых вагоны могут заново перегруппировываться, то есть области маневрирования. К этим картам не предъявляются особенные требования по точности, достаточно чуть ли не грубого обзора. Только вне областей маневрирования осуществляется контроль целостности поезда.
При выезде из области маневрирования на фазе калибровки осуществляется, прежде всего, взаимная идентификация TIM, имеющихся на поезде, соответственно упорядочению вагонов. Для этого каждый TIM пытается найти находящиеся в его окрестности другие TIM, причем производится обмен данными. Подобные данные могут, например, представлять собой определенные сенсорами и снабженные временной меткой скорость и/или положение и направление движения. Эти характеристики могут быть получены посредством сенсоров GNSS (Глобальная спутниковая навигационная система). На основе стабильности принятых данных в течение проектной длительности времени TIM, находящиеся на том же самом поезде, взаимно идентифицируются. Если также производится обмен специальными характеристиками поезда, как, например, скоростью, дополнительно или альтернативно могут применяться критерии достоверности для взаимной идентификации TIM. Например, переданная отдельными TIM скорость должна совпадать на протяжении проектного промежутка времени. Наконец, посредством проверки формальной модели по отношению к формальной модели поезда получают в результате гипотезу, что идентифицированные TIM находятся на том же самом поезде.
Вслед за короткой фазой калибровки осуществляется собственно контроль целостности поезда, в ходе которого производится циклический обмен сенсорными данными между TIM. Предпочтительным, наряду с применением скорости в качестве сравнительного критерия, также является определяемое из положения и направления движения расстояние между отдельными TIM. При этом пороговые значения служат тому, чтобы устанавливать, начиная с какого отклонения, например, в отношении расстояния и/или скорости, нарушается гипотеза, состоящая в том, что TIM находятся в том же самом поезде. Требуется только формальная верификация существования или несуществования гипотезы целостности поезда.
При нарушении гипотезы каждый TIM, который установил нарушение, сообщает об этом распознанном расцеплении поезда на центральный пункт управления эксплуатацией. На основе сообщения о местоположении TIM или поезда на центральном пункте управления эксплуатацией распознается соответствующий поезд, так что могут быть незамедлительно введены соответствующие эксплуатационные мероприятия.
Особенная устойчивость по отношению к отдельным или многократным отказам TIM может быть достигнута тем, что учитывается избыточность и достоверность. Например, отказ соседнего TIM можно игнорировать, если в том же направлении более удаленный TIM еще распознается.
При въезде в следующую область маневрирования контроль целостности поезда на основе информации карты отменяется и после покидания этой области маневрирования вновь инициализируется с новой калибровкой.
Согласно пункту 2 формулы изобретения предусмотрено, что TIM в фазе калибровки образуют кластеры, соответствующие их дальности действия данных. Особенно предпочтительными являются перекрывающиеся кластеры, благодаря чему возникает простая и даже многократная избыточность.
Способ может быть выполнен еще более устойчивым, если, согласно пункту 3 формулы изобретения, TIM передают сенсорные данные, принятые от первого TIM, на второй TIM. Таким способом создается практически глобальное отображение поезда, так что можно определить, какой TIM в направлении движения представляет собой первый TIM, а какой - последний TIM. Условия проверки для контроля целостности поезда могут тем самым упрощаться, однако при этом сложность способа и служебные нагрузки коммуникации возрастают.
Устройство для осуществления способа может, согласно пункту 5 формулы изобретения, выполняться особенно предпочтительно за счет того, что TIM как спроектированные согласно способу, выполняются как беспроводные модули, предусмотренные для других функциональных возможностей. Для этого пригодны, например, VICOS CT-модули фирмы Siemens, которые в первую очередь предназначены для оптимизации управления эксплуатацией. Эти модули используются, так сказать, не по своему прямому назначению или дополнительно для контроля целостности поезда. Уже имеющееся GNSS-устройство определения местоположения, а также соединение мобильной радиосвязи с центральным пунктом управления эксплуатацией и локальное беспроводное соединение ближней зоны используются для TIM-функции, причем цифровая карта дополнительно проектируется, и TIM-функция первоначально конфигурируется. Контроль целостности поезда осуществляется затем автономно. Обновления программного обеспечения и карты могут осуществляться посредством существующего соединения мобильной радиосвязи.
Хотя при эксплуатации было бы желательным, по возможности в начале и в конце контролируемого поезда разместить оснащенный TIM вагон в процессе маневрирования, но также для случая, когда это невозможно, осуществляется по меньшей мере частичный контроль в зависимости от степени оснащения поезда модулями TIM. При этом в варианте двойного использования согласно пункту 5 можно исходить из того, что большая процентная доля, например от 20 до 30% парка, вагонов уже оснащена беспроводными модулями, причем TIM-функциональность привела бы к дальнейшему повышению степени оснащенности.
Изобретение поясняется далее со ссылками на чертежи, на которых представлено следующее:
фиг.1 - представление карты с областями маневрирования и
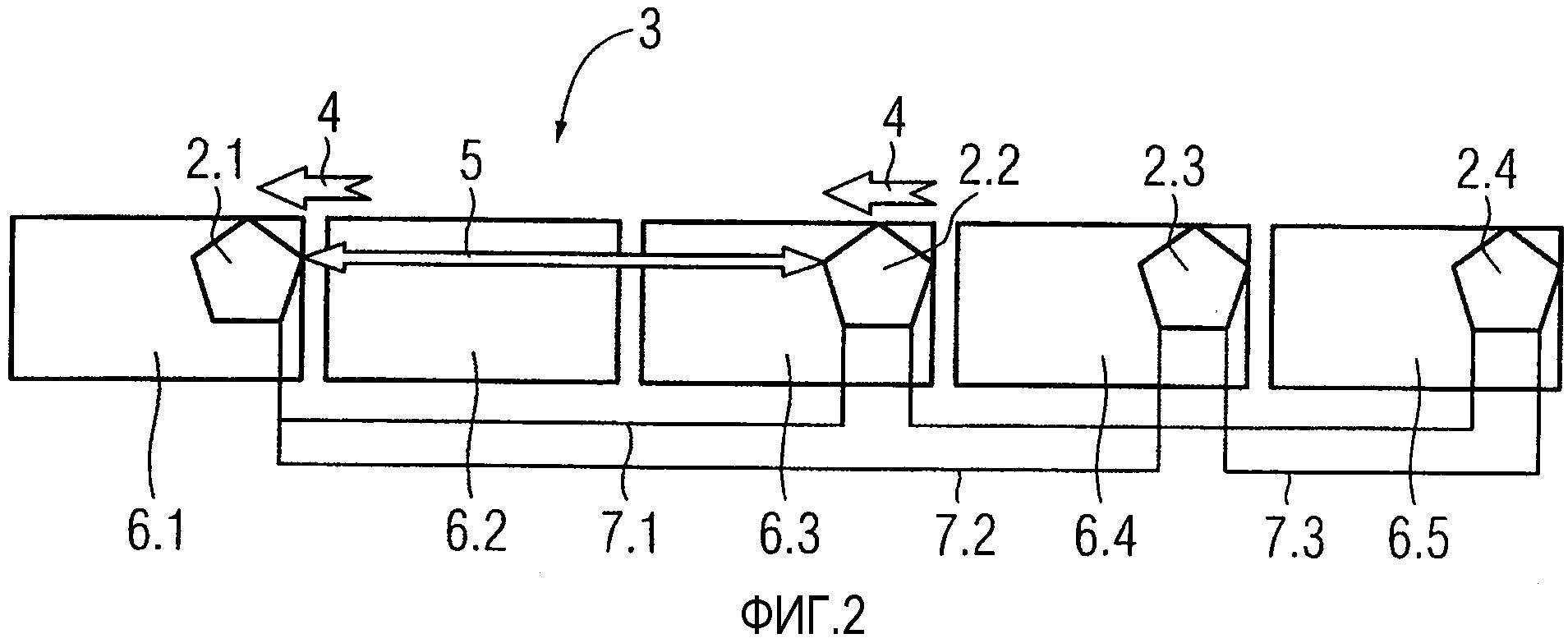
фиг.2 - конфигурация поезда с модулями для контроля целостности поезда.
Фиг.1 показывает для примера изображение карты трассы железнодорожной линии с областями 1.1, 1.2, 1.3 маневрирования, которая сохранена в скорей всего уже имеющемся беспроводном модуле, чтобы оснастить его в качестве модуля проверки целостности поезда (TIM) 2.1, 2.2, 2.3, 2.4. TIM 2.1, 2.2, 2.3, 2.4, кроме того, оснащен программным обеспечением инициализации, за счет чего становится возможным автономный контроль целостности поезда. Для этого проектируется фаза калибровки, на которой непосредственно после выезда из области 1.1, 1.2, 1.3 маневрирования осуществляется обмен данными между TIM 2.1, 2.2, 2.3, 2.4, распределенными внутри поезда соответственно упорядочению вагонов, осуществленному в области 1.1, 1.2 или 1.3 маневрирования. Посредством этого обмена данными TIM 2.1, 2.2, 2.3, 2.4 распознают свою принадлежность к выезжающему поезду 3. Предпочтительным образом осуществляется обмен данными, снабженными временной меткой, относительно скорости 4, положения и направления движения. Из данных положения и направления движения TIM 2.1, 2.2, 2.3, 2.4 определяют свое взаимное удаление 5. Данные могут определяться, например, с помощью приемника GNSS (Глобальной спутниковой навигационной системы).
В примере выполнения согласно фиг.2, в области 1.1, 1.2 или 1.3 маневрирования пять вагонов от 6.1 до 6.5 сконфигурированы в железнодорожный состав (поезд) 3. При этом первый вагон 6.1 может быть локомотивом поезда 3. Очевидно, что вагоны 6.1, 6.3, 6.4 и 6.5 оснащены, соответственно, модулями TIM 2.1, 2.2, 2.3 и 2.4, и что вагон 6.2 не имеет модуля TIM. В соответствии с дальностью действия их средств коммуникации ближней зоны TIM 2.1, 2.2, 2.3 и 2.4 в фазе калибровки образуют кластеры 7.1, 7.2 и 7.3. Кластеры 7.1, 7.2 и 7.3 могут при этом перекрываться, так что цепь коммуникации и при отказе одного или нескольких TIM 2.1, 2.2, 2.3, 2.4 не прерывается.
После того как TIM 2.1, 2.2, 2.3, 2.4, ввиду сохраняющейся стабильности данных, взаимно идентифицировались в фазе калибровки как принадлежащие поезду 3, начинается собственно контроль целостности поезда. При этом измеренные данные относительно скорости 4 и данные дальности 5, выведенные из измеренных данных положения и направления движения, обмениваются и оцениваются на основе критериев достоверности. Таким способом распознается, если, например, TIM 2.4 последнего вагона 6.5 поезда 3, ввиду расцепления этого вагона 6.5, имеет сниженную скорость 4 при увеличивающемся расстоянии 5 от соседнего TIM 2.3. В этом случае по меньшей мере TIM 2.3, который установил это опасное состояние, сообщает по меньшей мере собственные данные местоположения на центральный пункт управления эксплуатацией. Для этой коммуникации дальней зоны используется соединение мобильной радиосвязи, в тот время как для коммуникации ближней зоны между TIM 2.1, 2.2, 2.3, 2.4 предпочтительно используется соединение WLAN (беспроводной локальной сети).
Реферат
Изобретение относится к области автоматики и телемеханики и предназначено для контроля целостности поезда. Техническое решение имеет расположенные, по меньшей мере, в части вагонов поезда модули проверки целостности поезда (TIM), которые на основе цифровой карты распознают области маневрирования. Причем TIM при выезде из первой области маневрирования в фазе калибровки обмениваются данными и на основе заданных критериев стабильности данных распознают свою принадлежность к выезжающему поезду. До въезда во вторую область маневрирования TIM циклически обмениваются сенсорными данными, в частности, относительно скорости, положения и направления движения. На основе заданных логических критериев TIM распознают расцепление поезда и при необходимости передают сенсорные данные на центральный пункт управления эксплуатацией. Модули проверки целостности поезда имеют цифровую карту с областями маневрирования, средства коммуникации ближней зоны для взаимного обмена данными, а также средства коммуникации дальней зоны для передачи данных. Достигается повышение надежности контроля целостности подвижного состава. 2 н. и 3 з.п. ф-лы, 2 ил.
Формула
Документы, цитированные в отчёте о поиске
Способы и системы для определения целостности поезда
Комментарии