Способ и устройство для активного управления радиальной установкой колесных пар или колесных скатовтранспортных средств - RU2283254C2
Код документа: RU2283254C2
Чертежи


Описание
Настоящее изобретение относится к способу и устройству для активного управления радиальной установкой колесных пар или колесных скатов транспортных средств. Изобретение может использоваться прежде всего, но не исключительно, применительно к рельсовым транспортным средствам.
Из уровня техники известен целый ряд механических устройств, предназначенных для квазистатической установки называемых в последующем описании собирательным понятием "колесный узел" колесных пар или колесных скатов в требуемое положение на криволинейных участках пути и снабженных для этой цели пассивными или активными средствами регулирования. При активном управлении установкой колесных узлов они принудительно устанавливаются по радиусу закругления пути и удерживаются в этом положении. Подобные устройства управляют поворотом колесного узла с постоянной привязкой к радиусу закругления пути, обеспечивая уравнивание сумм действующих на колесные узлы ходовой части или транспортного средства поперечных сил максимум в некоторых ограниченных пределах. Один из основных недостатков состоит при этом в том, что при применении таких устройств ходовая устойчивость не только не улучшается по сравнению с традиционной ходовой частью с жесткой системой продольного направленного перемещения колесных узлов, но и в лучшем случае не ухудшается. Для обеспечения ходовой устойчивости необходимы также механические устройства, например гасители виляния или фрикционные замедлители поворота. Подобные устройства позволяют достичь лишь некоторого компромисса между обеспечением вписываемости в кривую и ходовой устойчивостью и в общем случае вызывают колебания элементов конструкции кузова вагона. Кинематическую цепь, связанную с колесными узлами, часто необходимо оснащать дополнительными амортизирующими элементами.
В ЕР 0785123 В1 описан способ сбора и обработки данных, используемых для управления движением ходовых частей, состоящих из отдельных колесных узлов, в рельсовой колее. В соответствии с описанным в указанной публикации способом в качестве характеризующих поворотное движение ходовой части параметров с помощью датчиков угла поворота безмоментным методом измеряют значения углов, угловой скорости или углового ускорения, измеренное значение или измеренные значения раскладывают на его(их) частотные составляющие, перемещения, которые по своей амплитуде, частоте и фазовому углу выделяются в частотных спектрах, классифицируют как паразитные колебания колес и выявленную таким путем векторную величину или выявленные таким путем векторные величины после ее(их) фазового сдвига на 180° и обработки подают в систему управления или регулирования в качестве информации, необходимой для изменения угла установки ходовой части, компенсируя таким путем с помощью системы управления или регулирования паразитные составляющие в совершаемых ходовой частью перемещениях. В описанном в этой публикации техническом решении не учитывается поперечная сила, действующая между колесной парой, соответственно колесным скатом и рельсами.
Из ЕР 0374290 В1 известно рельсовое транспортное средство, вдоль продольной оси которого с обеих его сторон установлено заданное количество отдельных колес, которые выполнены с возможностью их управляемого поворота. Согласно этой публикации для управления поворотом каждого отдельного колеса на криволинейных участках пути с целью обеспечить точное вписывание рельсового транспортного средства в кривую предусмотрено устройство для измерения направления рельсов, которое измеряет отклонение оси транспортного средства от направления рельсов и в зависимости от измеренной величины этого отклонения независимо для каждого отдельного колеса формирует управляющий сигнал. В качестве устройства для измерения направления рельсов в указанной публикации предлагается использовать бесконтактные оптоэлектронные или магнитные, соответственно электромагнитные системы. Описанное в этой публикации техническое решение не применимо к транспортным средствам, оснащенным колесными парами или колесными скатами.
В заявках JP А 06199236, JP А 07081564 и JP А 07081565 описан подход, позволяющий воздействовать на синусоидальное движение с помощью гидравлических приводов, расположенных между рамой тележки и буксами. Этот подход основан на выделении частоты синусоидального движения в спектре зарегистрированных поступательных или сопровождающих рыскание вибраций, для чего требуется использовать по меньшей мере по восемь датчиков из расчета на одну тележку, а также необходим длительный сбор данных с последующим их частотным анализом.
Недостаток всех известных в настоящее время методов и устройств, позволяющих воздействовать на динамические свойства колесных узлов, состоит в том, что все они предназначены лишь для того, чтобы
1. за счет управляемого поворота колес обеспечивать соответствующее движение в рельсовой колее при прохождении кривых, т.е. при прохождении закруглений пути, и/или
2. определять частоту синусоидального движения и воздействовать на него с такой же частотой, для чего необходимо выполнять преобразование Фурье, результат которого из-за затрачиваемого на его выполнение времени не соответствует фактическим быстро изменяющихся геометрическим параметрам в месте контакта между колесом и рельсом, и не позволяют оказывать на колесные скаты, соответственно колесные пары стабилизирующего воздействия, подразумевающего моментальную реакцию в реальном масштабе времени на фактическую ситуацию с нагрузками и режимом движения, которая может быстро меняться. Поэтому даже при движении по прямолинейному участку пути эти меры в крайнем случае позволяют лишь в весьма ограниченной степени улучшить движение в рельсовой колее.
В основу настоящего изобретения была положена задача устранить описанные выше недостатки, присущие известным из уровня техники решениям, и прежде всего разработать такие способ и устройство для активного управления радиальной установкой колесных узлов транспортных средств, которые обеспечивали бы надежное, сопровождающееся малым износом и плавное движение транспортного средства, соответственно подвижного состава прежде всего при его следовании по прямой, но также и при прохождении кривой. Еще одна задача изобретения состояла в разработке направленных на устранение нежелательных, паразитных колебаний колес мер по их стабилизации без необходимости длительного сбора требующихся для частотного анализа данных, сводящего на нет эффективность регулирования в реальном масштабе времени. Одно из преимуществ, связанных с обеспечением беспрепятственного качения колес по рельсам, состоит в значительном уменьшении уровня создаваемого ими шума. Еще одно преимущество состоит в снижении износа колес и рельсов.
Эта задача решается с помощью способа, отличительные признаки которого представлены в п.1 формулы изобретения, и с помощью устройства, отличительные признаки которого представлены в п.16 формулы.
Предпочтительные варианты осуществления изобретения представлены в соответствующих зависимых пунктах формулы изобретения.
Предлагаемый в изобретении способ активного управления радиальной установкой колес по меньшей мере одного колесного узла ходовой части основан на интегральном регулировании, которое в случае тележек предпочтительно происходит исключительно на уровне ходовой части, т.е. без механической кинематической связи с кузовом вагона, и заключается в сообщении колесному узлу установочных движений по меньшей мере в двух не идентичных частотных диапазонах. При этом колесному узлу сообщают первые установочные движения в первом частотном диапазоне и вторые установочные движения во втором частотном диапазоне, отличном от первого частотного диапазона, с их наложением на первые установочные движения.
При этом сообщением установочных движений колесному узлу во втором частотном диапазоне предпочтительно регулировать ходовую устойчивость транспортного средства.
Предлагаемое в изобретении устройство для активного управления радиальной установкой по меньшей мере одного, необязательно установленного на тележке или на иной аналогичной конструкции колесного узла транспортного средства содержит по меньшей мере один соединенный с колесным узлом исполнительный механизм для сообщения установочных движений этому колесному узлу и соединенный с исполнительным механизмом регулятор для управления этим исполнительным механизмом. Исполнительный механизм служит при этом главным образом поворота колесного узла вокруг вертикальной оси и дополнительно к этому либо вместо этого для поступательного его перемещения в поперечном направлении. Согласно изобретению регулятор, предназначенный для управления исполнительным механизмом, выполнен таким образом, что исполнительный механизм сообщает колесному узлу первые установочные движения в первом частотном диапазоне для квазистатического изменения положения колесного узла в соответствии с радиусом закругления фактически проходимого участка пути. Помимо этого для управления исполнительным механизмом такой регулятор выполнен по типу регулятора устойчивости таким образом, чтобы в отличном от первого частотного диапазона втором частотном диапазоне сообщать колесному узлу вторые установочные движения с их наложением на первые установочные движения для изменения положения колесного узла в целях стабилизации хода транспортного средства.
Иными словами, исполнительный механизм, который может быть выполнен в виде простого сервопривода, изменяет положение колесных узлов и развивает необходимые для этого усилия в соответствии с управляющими воздействиями, задаваемыми регулятором, и тем самым обеспечивает поворот колесного узла, т.е. колесной пары или колесного ската, вокруг вертикальной оси и дополнительно к этому либо вместо этого обеспечивает поступательное перемещение колесного узла в поперечном направлении. Исполнительный механизм, т.е., например, сервопривод, выполнен согласно изобретению таким образом, что он обеспечивает квазистатическое изменение положения колесного узла и развивает необходимые для этого усилия в зависимости от радиуса фактически проходимого транспортным средством криволинейного участка пути, например от радиуса закругления пути, и одновременно с этим обеспечивает квазистатическое изменение положения колесного узла и развивает необходимые для этого усилия с другой, обычно более высокой частотой в целях стабилизации хода транспортного средства как при прохождении им закругления пути, так и при следовании по прямой. При этом наиболее эффективную компенсацию поперечных сил, а также наиболее эффективную стабилизацию хода транспортного средства можно обеспечить в том случае, если в соответствии с предлагаемым в изобретении подходом управлять радиальной установкой нескольких, предпочтительно всех, колесных узлов транспортного средства.
Очевидно, что под частотой первых и вторых установочных движений имеется в виду не некоторая постоянная заданная частота, а изменяющаяся во времени частота, которая в конечном итоге определяется фактическим режимом движения транспортного средства, т.е. прежде всего мгновенной скоростью транспортного средства и особенностями фактически проходимого им участка пути.
В соответствии с предпочтительными вариантами осуществления предлагаемого в изобретении способа второй частотный диапазон охватывает частоты, которые по меньшей мере частично превышают частоты первого частотного диапазона. При этом предпочтительно, чтобы второй частотный диапазон превышал первый частотный диапазон. Предпочтительно далее, чтобы второй частотный диапазон непосредственно граничил с первым частотным диапазоном. Первый частотный диапазон предпочтительно охватывает частоты от 0 до 3 Гц, а второй частотный диапазон предпочтительно охватывает частоты от 0 до 10 Гц, преимущественно от 3 до 10 Гц.
Одно из преимуществ предлагаемого в изобретении решения состоит в возможности обеспечить точную установку колесных узлов в необходимое угловое положение на закруглениях пути и благодаря этому при всех рабочих условиях уравнять сумму передаваемых через место контакта между колесом и рельсом поперечных сил, действующих на все колесные узлы одной тележки. Иными словами, предлагаемое в изобретении решение позволяет получить в системе приложенных к каждому конкретному колесному скату поперечных сил такую их равнодействующую, что приложенные к отдельным колесным узлам одной тележки равнодействующие по меньшей мере по абсолютной величине оказываются в основном равны между собой.
Еще одно преимущество предлагаемого в изобретении решения состоит в возможности обеспечить стабильность хода всех колесных узлов при движении транспортного средства и по прямолинейным, и по криволинейным участкам пути. При этом установка колес в требуемое угловое положение при движении транспортного средства по закруглению пути возможна даже при высоких силах тяги и при неблагоприятных геометрических параметрах в месте контакта между колесом и рельсом. Поэтому в соответствии с предпочтительным вариантом осуществления изобретения при движении транспортного средства по криволинейному участку пути предлагается путем квазистатической установки колес колесного узла в требуемое положение сообщением им установочных движений в первом частотном диапазоне обеспечивать уравнивание сумм действующих на колеса колесного узла ходовой части поперечных сил. Иными словами, в этом случае к каждому колесному узлу приложена соответствующая равнодействующая поперечных сил, которая по меньшей мере по ее абсолютной величине в основном соответствует приложенным к другим колесным узлам равнодействующим поперечных сил.
Еще одно преимущество предлагаемого в изобретении решения состоит в возможности обеспечить за счет соответствующих настроек и алгоритмов особое распределение поперечных сил между колесными узлами и/или создание в колесных узлах ходовой части, соответственно транспортного средства особых условий износа в месте контакта между колесом и рельсом с целью оптимального согласования динамических свойств или ходовых качеств, например, с особыми условиями эксплуатации ходовой части и/или ее содержания в исправном состоянии. Так, в частности, для отдельного колеса можно создать условия для целенаправленного распределения его износа, т.е., например, задать определенный профиль его износа, что позволяет контролировать изменение профиля сопряжения колеса с рельсом. Поэтому в соответствии со следующим предпочтительным вариантом осуществления предлагаемого в изобретении способа при движении транспортного средства по криволинейному участку пути путем квазистатической установки колес колесного узла в требуемое положение сообщением им установочных движений в первом частотном диапазоне предлагается обеспечивать распределение действующих на колеса колесных узлов поперечных сил, при котором обеспечивается согласование динамических свойств или ходовых качеств с заданными условиями эксплуатации ходовой части и ее содержания в исправном состоянии.
Помимо этого контроль ходовой устойчивости и установки конкретного колесного узла в требуемое положение позволяет также осуществлять диагностику всех компонентов работающего в соответствии с предлагаемым в изобретении способом устройства, проверяя таким путем их исправность.
Согласно следующему предпочтительному варианту осуществления изобретения предлагаемый в нем способ отличается тем, что сообщением установочных движений во втором частотном диапазоне регулируют ходовую устойчивость транспортного средства. С этой целью в процессе регулирования мгновенное состояние механической системы предпочтительно представлять в определенном виде на основе измеренных мгновенных значений одного или нескольких параметров ее состояния, например представлять в виде соответствующей матрицы устойчивости. При этом, как очевидно, учитываются и переменные параметры, которые определяются реализующими установочные движения исполнительными механизмами. К указанным выше параметрам состояния механической системы относятся помимо прочего скорость и ускорение колесного узла в поперечном направлении, т.е. поперечно продольному направлению транспортного средства, а также скорость и ускорение колесного узла при его повороте вокруг вертикальной оси.
Такое описывающее мгновенное состояние механической системы ее представление проверяется на устойчивость с помощью пригодных для этой цели математических алгоритмов. При обнаружении неустойчивого состояния зависящие от исполнительных механизмов переменные параметры математического описания системы соответствующим путем изменяют таким образом, чтобы получить устойчивую систему, соответственно изменяют до тех пор, пока не будет получена такая устойчивая система. Затем на основе полученных таким путем "устойчивых" мгновенных значений зависящих от исполнительных механизмов переменных параметров формируются управляющие сигналы, подаваемые на соответствующий исполнительный механизм с целью привести систему посредством исполнительных механизмов в устойчивое состояние. В отличие от известных методов регулирования устойчивости, при осуществлении которых требуется занимающая достаточно много времени регистрация значений измеряемых величин и анализ наборов измеренных значений (например, путем преобразования Фурье), описанный выше подход позволяет эффективным путем быстро и непосредственно стабилизировать систему.
В соответствии с этим предлагаемое в изобретении решение позволяет отказаться от применения устанавливаемых между ходовой частью и кузовом вагона стабилизирующих устройств для улучшения динамических свойств или ходовых качеств транспортного средства, например гасителей виляния или фрикционных замедлителей поворота. Помимо этого можно отказаться и от применения амортизирующих элементов в кинематической цепи, связанной с колесными узлами, прежде всего в связующей системе тяг и рычагов. К обеспечиваемым предлагаемым в изобретении решением преимуществам следует отнести и возможность минимизировать угол набегания колеса на рельс и тем самым нагрузку на рельсовый путь, а также возможность минимизировать, соответственно оптимизировать износ колеса и рельса. В результате обеспечивается устойчивое движение транспортного средства во всем диапазоне скоростей, в том числе и при высоких скоростях. Отсутствие связующей системы тяг и рычагов между колесными узлами и кузовом вагона не только позволяет упростить механическую конструкцию, но и исключить передачу механического шума и вибраций на кузов вагона по звеньям этой системы тяг и рычагов.
Согласно еще одному предпочтительному варианту осуществления изобретения интегральное регулирование осуществляют на транспортном средстве с содержащей тележку ходовой частью таким образом, что оно происходит исключительно на уровне ходовой части без механической кинематической связи с кузовом вагона, благодаря чему, как уже указывалось выше, наряду с упрощением механической конструкции удается избежать передачи механического шума и вибраций на кузов вагона по звеньям системы тяг и рычагов. Очевидно, что устройство обработки сигналов или иное аналогичное устройство может располагаться и в кузове, соответственно на кузове вагона, однако в этом случае его можно соединить с исполнительными элементами исполнительного механизма лишь соответствующими линиями управления, такими как кабели или иные аналогичные соединительные линии.
В следующем предпочтительном варианте осуществления предлагаемого в изобретении способа при регулировании управляют по меньшей мере одним быстро реагирующим на управляющее воздействие исполнительным механизмом, например быстро реагирующим на управляющее воздействие сервоприводом, который регулирует угловое положение колесного узла относительно рамы ходовой части или кузова вагона, обеспечивая таким путем, например, радиальную установку колесного узла в оптимальное положение относительно закругления пути.
В соответствии со следующими предпочтительным вариантом сообщением установочных движений предлагается регулировать относительный угол между крайними колесными узлами транспортного средства, оснащенного по меньшей мере двумя колесными узлами, что позволяет устанавливать колесные узлы транспортного средства в оптимальное положение, например, на закруглении пути.
Для регулирования в принципе можно использовать любые входные величины, которые по отдельности либо в комбинации позволяют сделать вывод о фактическом состоянии транспортного средства и/или колесной пары, прежде всего о фактическом режиме его, соответственно ее движения. В соответствии с этим положение колесного узла предпочтительно регулировать в зависимости от радиуса закругления пути и/или скорости движения и/или нескомпенсированного поперечного ускорения и/или коэффициента трения и/или геометрических параметров в месте контакта между колесом и рельсом.
Для регулирования предпочтительно использовать далее измеренное значение поперечного перемещения по меньшей мере одного колесного узла относительно рамы тележки или кузова вагона и/или измеренное значение угла рыскания по меньшей мере одного колесного узла относительно рамы тележки или кузова вагона. В дополнение к этим величинам либо вместо них для регулирования равным образом можно использовать и измеренное значение линейного, соответственно углового установочного перемещения по меньшей мере одного исполнительного механизма или измеренные значения перестановочных усилий, развиваемых по меньшей мере одним исполнительным механизмом. Помимо этих величин можно использовать также измеренное значение скорости движения, измеренное значение скорости или ускорения колесного узла в поперечном направлении либо измеренное значение скорости рыскания или ускорения рыскания колесного узла. И, наконец, в дополнение к указанным выше величинам либо вместо них можно использовать радиус проходимого транспортным средством закругления пути.
Исполнительный механизм в принципе может иметь любое исполнение, обеспечивающее реализацию соответствующих установочных движений. В принципе для реализации первых и вторых установочных движений можно использовать один единственный исполнительный механизм. При этом необходимо лишь обеспечить возможность отработки исполнительным механизмом подаваемых на него управляющих воздействий с быстротой, достаточной для реализации им вторых установочных движений во втором частотном диапазоне. Очевидно также, что для реализации первых и вторых установочных движений можно использовать и различные исполнительные механизмы. В качестве исполнительного механизма предпочтительно использовать электрический, гидравлический или пневматический сервопривод.
Количество исполнительных механизмов и место для их размещения в принципе можно выбирать произвольно. При этом необходимо лишь обеспечить возможность надежной реализации ими соответствующих установочных движений. В соответствии с этим согласно одному из предпочтительных вариантов выполнения предлагаемого в изобретении устройства из расчета на каждое колесо колесного узла и дополнительно к этому либо вместо этого из расчета на каждую буксу колесного узла, а также дополнительно к этому либо вместо этого из расчета на каждую группу кинематически связанных между собой колес колесного узла предусмотрено по меньшей мере по одному исполнительному механизму.
Кинематическая цепь, связывающая между собой исполнительный механизм и колесный узел, в принципе может иметь любое исполнение. Однако в соответствии с предпочтительным вариантом выполнения предлагаемого в изобретении устройства между исполнительным механизмом и колесом или буксой колесного узла можно расположить передаточный механизм, позволяющий тем самым при использовании простых исполнительных механизмов простым путем реализовывать необходимые установочные движения, соответственно развивать перестановочные усилия требуемой величины.
Принцип работы и прежде всего рабочее движение исполнительного механизма можно согласовать с необходимым установочным движением. При необходимости, например, обеспечить линейное установочное перемещение предпочтительно использовать исполнительный механизм, совершающий линейное рабочее движение. При необходимости же обеспечить поворотное или угловое установочное перемещение предпочтительно использовать исполнительный механизм, совершающий вращательное рабочее движение.
Исполнительный механизм в принципе можно располагать в любом приемлемом месте в зависимости от требуемой кинематической связи между отдельными колесными узлами. Так, в частности, исполнительный механизм можно расположить между колесами, находящимися по разные стороны транспортного средства, или же его можно расположить на одной из сторон транспортного средства, прежде всего между колесами, находящимися по одну сторону транспортного средства.
С целью обеспечить надежную работу предлагаемого в изобретении устройства и при выходе из строя отдельных его исполнительных механизмов согласно еще одному предпочтительному варианту его выполнения для создания резерва предлагается в комбинации между собой использовать несколько исполнительных механизмов, которые в этом случае предпочтительно служат для реализации одних и тех же установочных движений, но в принципе при выходе из строя другого исполнительного механизма, соответственно других исполнительных механизмов могут реализовывать то же самое установочное движение и индивидуально.
Ниже изобретение более подробно рассмотрено на примере некоторых вариантов его осуществления со ссылкой на прилагаемые схематичные чертежи, на которых без соблюдения масштаба показано:
на фиг.1 - самоустанавливающаяся трехосная ходовая часть, соответственно трехосное транспортное средство с самоустанавливающимися осями,
на фиг.2 - двухосная ходовая часть, соответственно двухосное транспортное средство и
на фиг.3-7 - различные варианты выполнения колесных пар, соответственно колесных скатов ходовой части или транспортного средства с активным управлением их радиальной установкой.
На фиг.1 схематично показана трехосная ходовая часть 1 для рельсового транспортного средства, которая может представлять собой, например, трехосную тележку или три закрепленных на кузове вагона кинематически связанных между собой колесных узла в виде колесных скатов или колесных пар. Такая ходовая часть имеет не показанную на чертеже раму тележки или кузова вагона, состоящую из продольных и поперечных балок. К продольным балкам с помощью не показанных на чертеже элементов рессорного комплекта крепятся буксы 2-7 трех колесных узлов 8, 9, 10, а именно буксы 2, 3 первого колесного узла 8 (крайнего колесного узла), буксы 4, 5 второго колесного узла 9 (среднего колесного узла) и буксы 6, 7 третьего колесного узла 10 (крайнего колесного узла). Колесные узлы 8, 9, 10 имеют колеса 11. Колесные узлы 8, 9, 10 могут приводиться во вращение не показанными на чертеже приводными двигателями, например тяговыми электродвигателями с опорно-осевой подвеской или двигателями с опорнорамной подвеской.
Буксы 2, 3, 6, 7 обеих крайних колесных узлов 8, 10 выполнены подвижными, в частности, в направлении движения, соответственно в направлении, противоположном направлению движения рельсового транспортного средства, что показано указывающими направление такого перемещения стрелками х1 и х2. Буксы 4, 5 среднего колесного узла 9 выполнены подвижными, в частности, перпендикулярно направлению движения рельсового транспортного средства, что показано указывающими направление такого перемещения стрелками у1 и у2.
Каждые из трех расположенных по одну и ту же сторону ходовой части букс 2, 3, 4, 5, 6, 7 кинематически связаны между собой системами направляющих тяг и поворотных рычагов.
В системе направляющих тяг и поворотных рычагов предусмотрена ориентированная наклонно к продольному направлению транспортного средства направляющая тяга 12, которая расположена между шарниром 13 коленчатого рычага 14 и шарниром 15 буксы 3.
Коленчатый рычаг 14 имеет зафиксированную на раме ось 16 поворота и шарниром 17, расположенным на втором его плече, соединен с торцом буксы 5 среднего колесного узла 9.
В системе направляющих тяг и поворотных рычагов предусмотрен далее поворотный рычаг 18 с зафиксированной на раме и расположенной по его середине осью 19 поворота, который с одной стороны через направляющую тягу 20, присоединенную к нему первым шарниром 21, соединен с буксой 7, а с другой стороны вторым шарниром 22 соединен с направляющей тягой 23, другой конец которой соединен уже описанным выше шарниром 13 с коленчатым рычагом 14.
В рассматриваемом варианте симметрично относительно продольной оси рельсового транспортного средства звеньям и сочленениям, кинематически связывающим между собой находящиеся по одну сторону ходовой части буксы 3, 5, 7, предусмотрены аналогичные звенья и сочленения, кинематически связывающие между собой находящиеся по другую сторону ходовой части буксы 2, 4, 6.
При этом по другую сторону ходовой части также предусмотрена ориентированная наклонно к продольной оси транспортного средства направляющая тяга 24, которая с одной стороны шарниром 25 соединена с коленчатым рычагом 26, а с другой стороны шарниром 27 соединена с буксой 2.
Коленчатый рычаг 26 имеет зафиксированную на раме ось 28 поворота и вторым его плечом соединен шарниром 29 с торцом буксы 4 среднего колесного узла 9.
В рассматриваемой кинематической цепи предусмотрен далее поворотный рычаг 30 с зафиксированной на раме и расположенной по его середине осью 31 поворота, который с одной стороны через направляющую тягу 32, присоединенную к нему первым шарниром 33, соединен с буксой 6, а с другой стороны вторым шарниром 34 соединен с направляющей тягой 35, другой конец которой соединен уже описанным выше шарниром 25 с коленчатым рычагом 26.
Для реализации первого и второго установочных движений колесных узлов 8, 9 и 10 предусмотрен ряд исполнительных механизмов в виде простых сервоприводов, расположение и принцип действия которых более подробно рассмотрены ниже.
С буксой 2 соединен перемещающий ее в направлении движения транспортного средства, соответственно в обратном направлении (х1, х2) линейный сервопривод 36.
С буксой 4 соединен перемещающий ее перпендикулярно направлению движения транспортного средства (у1, у2) линейный сервопривод 37. Вместо этого сервопривода либо в дополнение к нему может быть предусмотрен показанный на фиг.1 сервопривод 38 вращательного действия, обеспечивающий поворот буксы вокруг оси 28.
С буксой 6 соединен перемещающий ее в направлении движения транспортного средства, соответственно в противоположном ему направлении (х1, х2) линейный сервопривод 39. Вместо этого сервопривода либо в дополнение к нему может быть предусмотрен показанный на фиг.1 линейный сервопривод 40, перемещающий буксу в направлении движения транспортного средства, соответственно в противоположном ему направлении (х1, х2) и соединенный шарниром 33 с поворотным рычагом 30, а также сервопривод 41 вращательного действия. Этот сервопривод 41 обеспечивает поворот буксы вокруг оси 31.
Сервоприводы 36-41 по выбору можно использовать либо по отдельности, либо в сочетании между собой. Использование нескольких сервоприводов 36-41 в сочетании между собой позволяет создать определенный их резерв, благодаря которому при выходе из строя одного или нескольких сервоприводов 36-41 выполнение его, соответственно их функций по меньшей мере частично будут брать на себя остальные, продолжающие исправно работать сервоприводы.
Предлагаемый в изобретении способ основан на интегральном регулировании, которое происходит исключительно на уровне ходовой части, т.е. без механической кинематической связи с кузовом вагона, путем одновременной, соответственно интегральной подачи управляющих воздействий по меньшей мере в двух частотных диапазонах.
В первом частотном диапазоне происходит квазистатическая установка колесных узлов 8, 9, 10 в требуемое положение на закруглениях пути при уравнивании сумм действующих на колесные узлы 8, 9, 10 ходовой части, соответственно транспортного средства поперечных сил. Иными словами, к каждому колесному узлу приложена равнодействующая поперечных сил, которая по меньшей мере по абсолютной величине соответствует приложенным к другим колесным узлам равнодействующим поперечных сил.
Во втором частотном диапазоне происходит уже рассмотренное выше регулирование ходовой устойчивости.
Так, в частности, на основе измеренных мгновенных значений одного или нескольких более подробно рассмотренных ниже параметров состояния механической системы ее мгновенное состояние представляют в определенном виде. Мгновенное состояние механической системы можно представлять, например, в виде соответствующей матрицы устойчивости. На эту матрицу влияют главным образом не изменяемые механические параметры не поддающихся активному управлению элементов системы, таких, например, как пружины или рессоры и иные аналогичные элементы. Однако при формировании этой матрицы равным образом учитываются и переменные параметры, определяемые сервоприводами.
Эта описывающая мгновенное состояние механической системы матрица устойчивости проверяется на устойчивость с помощью пригодных для этой цели математических алгоритмов. При обнаружении неустойчивого состояния зависящие от сервоприводов поддающиеся активному воздействию переменные параметры математического описания системы соответствующим путем изменяют таким образом, чтобы получить устойчивую матрицу устойчивости, т.е. устойчивую систему, соответственно изменяют до тех пор, пока не будет получена такая устойчивая матрица устойчивости. Затем на основе полученных таким путем "устойчивых" мгновенных значений зависящих от сервоприводов переменных параметров формируются управляющие сигналы, подаваемые на соответствующий сервопривод. Так, в частности, сервоприводы позволяют простым и эффективным путем быстро привести систему в устойчивое состояние. В отличие от известных методов регулирования устойчивости в данном случае не требуется занимающая достаточно много времени регистрация значений измеряемых величин и анализ наборов измеренных значений (например, путем преобразования Фурье), в связи с чем реакция на фактическое состояние движущейся системы возможна лишь с временной задержкой.
К указанным выше параметрам состояния относятся, в частности, скорость и ускорение колесного узла в поперечном направлении, т.е. поперечно продольному направлению транспортного средства, а также скорость и ускорение колесного узла относительно вертикальной оси. В зависимости от выбранной концепции автоматического регулирования по меньшей мере один из этих измеренных параметров состояния либо несколько этих измеренных параметров состояния в их сочетании используют для рассмотренного выше регулирования устойчивости.
Второй частотный диапазон охватывает частоты, которые по меньшей мере частично превышают частоты, относящиеся к первому частотному диапазону. Регулирование в этом частотном диапазоне предполагает управление быстро реагирующими на управляющее воздействие сервоприводами 36-41, которые изменяют угловое положение колесных узлов 8 и 10, соответственно обеспечивают поперечное перемещение колесного узла 9 относительно рамы.
В соответствии с этим вариантом регулируется относительный угол между крайними колесными узлами 8, 10, а также поперечное перемещение среднего колесного узла 9.
Вместо регулирования относительного угла или в дополнение к регулированию относительного угла можно регулировать абсолютный угол или абсолютные углы между одним, несколькими и/или всеми колесными узлами 8, 9, 10 и рамой ходовой части, соответственно кузовом вагона.
В этом варианте регулируемая квазистатическая установка соответствующих колесных узлов 8, 9, 10 в требуемое положение происходит только в зависимости от радиуса закругления проходимого ими участка пути. Радиус закругления пути можно определять на основе измерительных сигналов, выдаваемых соответствующими датчиками, например датчиками поперечного и/или углового ускорения, датчиками угловой скорости и/или датчиками поперечной скорости.
Вместо этого регулировать положение соответствующего колесного узла 8, 9, 10 можно в зависимости от радиуса закругления пути, скорости движения транспортного средства, нескомпенсированного поперечного ускорения, коэффициента трения и/или геометрических параметров в месте контакта между ходовым колесом 11 и рельсом. Для определения этих величин также используется соответствующая система датчиков.
В целом же для регулирования положения колесных узлов могут использоваться самые разнообразные величины, в качестве примера которых можно назвать величину поперечного перемещения каждого из колесных узлов 8, 9, 10 относительно рамы, угол рыскания каждого из колесных узлов 8, 9, 10 относительно рамы, величину установочного перемещения, соответственно установочного угла сервоприводов 36-41, величину перестановочных усилий, соответственно управляющих моментов, развиваемых сервоприводами 36-41, величину (абсолютной) скорости движения транспортного средства, величину (абсолютной) скорости, соответственно (абсолютного) ускорения колесного узла в поперечном направлении, величину (абсолютной) скорости рыскания, соответственно (абсолютного) ускорения рыскания колесного узла и/или радиус закругления пути и которые измеряются с помощью соответствующих датчиков, например датчиков поперечного и/или углового ускорения, датчиков угловой скорости и/или датчиков поперечной скорости.
Для подобного регулирования положения колесных пар, соответственно колесных скатов необходимость в частотном анализе совершаемых ими движений или перемещений отсутствует.
Предлагаемое в изобретении устройство содержит не показанный на фиг.1 регулятор, соединенный с соответствующими управляющими входами сервоприводов 36-41. Этот регулятор используется и для квазистатической установки, и для регулирования устойчивости колесных узлов 8, 9, 10 рельсового транспортного средства по меньшей мере с двумя, а в рассматриваемом варианте - с тремя колесными узлами 8, 9, 10 или тележки рельсового транспортного средства по меньшей мере с двумя колесными узлами.
Сервоприводы 36-41 реализуют первые установочные движения в виде квазистатического изменения положения колесных узлов за счет создания необходимых для этого усилий в зависимости от радиуса проходимого транспортным средством криволинейного участка пути, например от радиуса закругления пути, а также для стабилизации движения транспортного средства при прохождении им закругления пути и при следовании по прямой реализуют накладываемые на первые вторые установочные движения в виде изменения положения колесных узлов за счет создания необходимых для этого усилий с более высокой частотой.
Сервоприводы 36-41 изменяют положение колесных узлов и развивают необходимые для этого усилия в соответствии с управляющими воздействиями, задаваемыми регулятором.
Сервоприводы 36-41 обеспечивают, в частности, поворот колесных узлов 8, 10 вокруг вертикальной оси и/или поступательное перемещение колесного узла 9 в поперечном направлении, т.е. в направлении, перпендикулярном направлению движения транспортного средства.
В качестве сервоприводов 36-41 для создания необходимых перестановочных усилий могут использоваться электрические, гидравлические или пневматические приводы либо комбинации таких приводов.
На каждое колесо 11, соответственно на каждую буксу колесного узла 8, 9, 10 по одну сторону ходовой части предусмотрено, как это имеет место в рассматриваемом варианте, по меньшей мере по одному сервоприводу 36-41.
Сервопривод 36-41 воздействует по меньшей мере на два колеса, которые кинематически связаны между собой. Кинематическая цепь, связывающая одно колесо 11 с другим колесом 11 того же самого колесного узла 8, 9, 10 или с колесом другого колесного узла, может, как это имеет место в рассматриваемом варианте, располагаться с той же стороны транспортного средства, что и сервоприводы, либо с противоположной его стороны.
Развиваемое сервоприводами 36-41 усилие или развиваемый ими управляющий момент может передаваться на соответствующее колесо непосредственно либо опосредованно через промежуточный редуктор или передаточный механизм.
В рассматриваемом варианте сервоприводы 36, 37, 39, 40 реализуют линейное перемещение кинематически связанных с ними букс. Сервоприводы 36, 37, 39, 40 одновременно могут выполнять функцию направляющей тяги. Эти сервоприводы дополняют возможно предусмотренную пассивную кинематическую цепь и соединены с ней рычагами, соответственно тягами.
Вместо этого сервопривод может реализовывать поворотное движение, которое в рассматриваемом варианте реализуется сервоприводами 38, 41. В этом случае такой сервопривод одновременно может выполнять функцию поворотной опоры. Этот сервопривод дополняет возможно предусмотренную пассивную кинематическую цепь и соединен с ней рычагами, соответственно тягами либо поворотным механизмом.
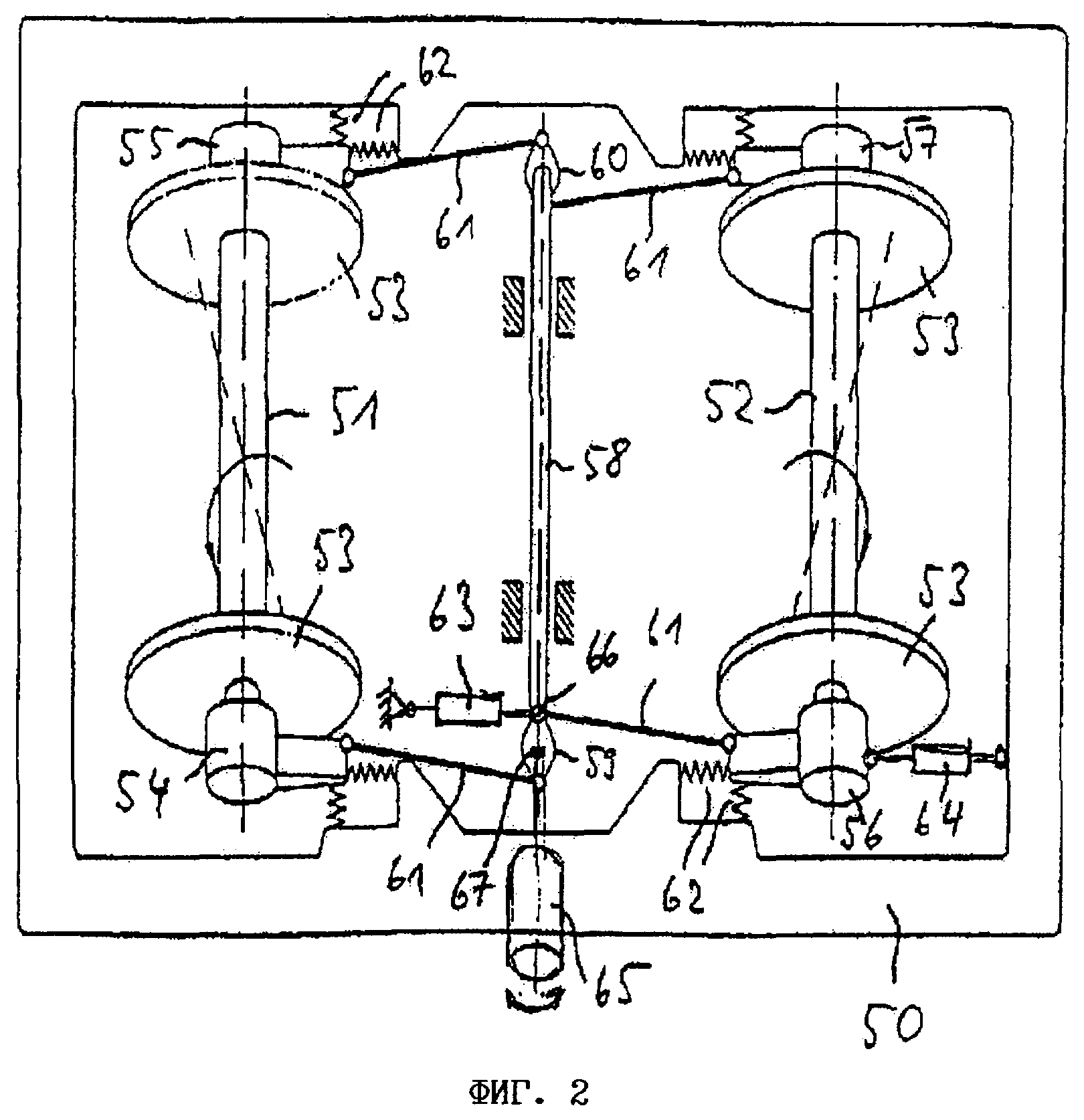
На фиг.2 показана ходовая часть рельсового транспортного средства. На этом чертеже показаны рама 50 тележки или кузова вагона и два колесных узла 51, 52 с колесами 53 и буксами 54-57. Колесные узлы 51, 52 для управления их радиальной установкой в кривой пути соединены с поворотным валом 58 через поворотные рычаги 59, 60 и направляющие тяги 61, а также соединены с рамой 50 элементами 62 первичного рессорного подвешивания.
Сервоприводы 63-65 реализуют первые установочные движения в виде квазистатического изменения положения колесных узлов за счет создания необходимых для этого усилий в зависимости от радиуса проходимого транспортным средством криволинейного участка пути, например от радиуса закругления пути, а также для стабилизации движения транспортного средства при прохождении им закругления пути и при следовании по прямой реализуют накладываемые на первые вторые установочные движения в виде изменения положения колесных узлов за счет создания необходимых для этого усилий с более высокой частотой.
Сервоприводы 63-65 изменяют положение колесных узлов и развивают необходимые для этого усилия в соответствии с управляющими воздействиями, задаваемыми регулятором, который на фиг.2 не показан.
Сервоприводы 63-65 обеспечивают, в частности, поворот колесных узлов 51, 52 вокруг вертикальной оси.
В качестве сервоприводов 63-65 для создания необходимых перестановочных усилий могут использоваться электрические, гидравлические или пневматические приводы либо комбинации таких приводов.
В рассматриваемом варианте сервоприводы 63-65 воздействуют на оба колесных узла 51, 52, поскольку они кинематически связаны между собой через поворотный вал 58, поворотные рычаги 59, 60 и направляющие тяги 61. Линейный сервопривод 63 присоединен к поворотному рычагу 59 в точке 66 их шарнирного соединения. Линейный сервопривод 64 присоединен к буксе 56 колесного узла 52. Вращательный сервопривод 65 присоединен к поворотному рычагу 59 и обеспечивает его поворот вокруг горизонтальной оси 67.
В описанной выше системе может быть предусмотрен один, несколько или же все сервоприводы 63-65. При использовании нескольких сервоприводов 63-65 некоторые из них можно задействовать для реализации первых установочных движений, т.е. для квазистатической установки колесных узлов в зависимости от радиуса закругления пути (т.е. в общем случае для реализации установочных движений в диапазоне более низких частот), а другие - для реализации вторых установочных движений, т.е. для регулирования устойчивости (т.е. в общем случае для реализации установочных движений в диапазоне более высоких частот).
В соответствии с этим при использовании в сочетании между собой нескольких сервоприводов 63-65 создается определенный их резерв, благодаря которому при выходе из строя одного или нескольких сервоприводов 63-65 выполнение его, соответственно их функций по меньшей мере частично будут брать на себя остальные, продолжающие исправно работать сервоприводы.
В принципе поворотный вал 58 можно и не предусматривать, а вместо этого установить с каждой стороны ходовой части по меньшей мере по одному сервоприводу типа сервоприводов 63-65.
В первом частотном диапазоне происходит квазистатическая установка колесных узлов 51, 52 в требуемое положение на закруглениях пути при уравнивании сумм действующих на колесные пары, соответственно на колесные узлы 51, 52 ходовой части, соответственно транспортного средства поперечных сил. Иными словами, к каждому колесному узлу в результате приложена равнодействующая поперечных сил, которая по меньшей мере по абсолютной величине соответствует приложенным к другим колесным узлам равнодействующим поперечных сил.
Во втором частотном диапазоне происходит уже рассмотренное выше регулирование ходовой устойчивости. При этом второй частотный диапазон охватывает частоты, которые по меньшей мере частично превышают частоты, относящиеся к первому частотному диапазону. Регулирование в этом частотном диапазоне осуществляется регулятором, который управляет быстро реагирующими на управляющее воздействие сервоприводами 63-65, которые изменяют угловое положение колесных узлов 51, 52 относительно рамы.
В соответствии с этим вариантом, таким образом, также регулируется относительный угол между колесными узлами 51, 52. Помимо этого регулируемая квазистатическая установка соответствующего колесного узла 51, 52 в требуемое положение и в этом варианте происходит только в зависимости от радиуса закругления проходимого им участка пути.
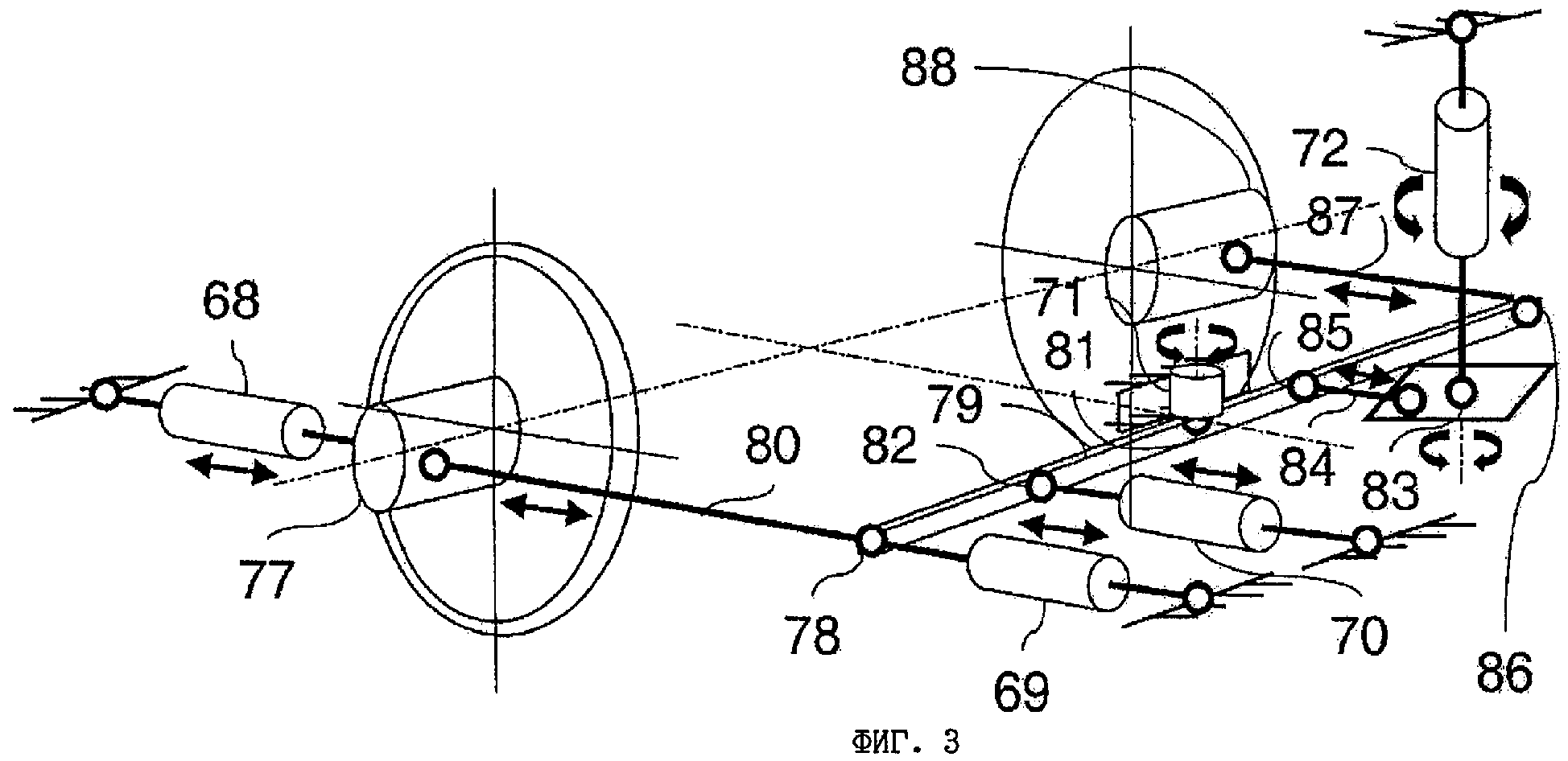
На фиг.3 и 4 на примере отдельных колесных узлов ходовых частей, соответственно транспортных средств с активным управлением радиальной установкой этих колесных узлов показаны различные возможные варианты размещения одного или нескольких сервоприводов 68-76.
В показанном на фиг.3 варианте предусмотрен линейный сервопривод 68, присоединенный к буксе 77. С направляющей балкой 79 расположенным на ее конце шарниром 78 соединен линейный сервопривод 69. К этому же шарниру 78 присоединена направляющая тяга 80, которая другим своим концом соединена с буксой 77. Направляющая тяга 80 может поворачиваться вокруг вертикальной оси 81, пересекающей среднюю линию транспортного средства. Помимо этого, с направляющей балкой 79 шарниром 82, который смещен от оси 81 поворота, соединен линейный сервопривод 70. К направляющей балке 79 присоединен далее вращательный сервопривод 71, установленный на оси 81 поворота. С направляющей балкой 79 через ее шарнир 85, который смещен от оси 81 поворота, а также через направляющую тягу 84 и поворотный рычаг 83 соединен также вращательный сервопривод 72. Кроме того, с направляющей балкой 79 расположенным на другом ее конце шарниром 86 соединена направляющая тяга 87, которая с другой ее стороны соединена с буксой 88.
В показанном на фиг.4 варианте предусмотрен реализующий установочное движение в параллельном направлению движения транспортного средства направлении линейный сервопривод 73, который для передачи создаваемого им перестановочного усилия шарниром 89 соединен с одним из плеч коленчатого рычага 90 и с направляющей тягой 91, которая с другой ее стороны соединена с буксой 92. С коленчатым рычагом 90, который может поворачиваться вокруг вертикальной оси 93, соединен установленный на этой оси вращательный сервопривод 76. Помимо этого, в системе предусмотрены линейные сервоприводы 74, 75, которые параллельно воздействуют на направляющую балку 94. Это воздействие передается на направляющую балку 94 через шарнир 95 и соответственно через шарнир 96, расположенный на одном из плеч коленчатого рычага 97. С другим концом этого коленчатого рычага 97, который может поворачиваться вокруг вертикальной оси 98, шарниром соединена направляющая тяга 99, которая с другой ее стороны соединена с буксой 100. Каждый из этих сервоприводов 73-76 также можно использовать по отдельности либо несколько этих сервоприводов для создания определенного их резерва можно использовать в различных комбинациях.
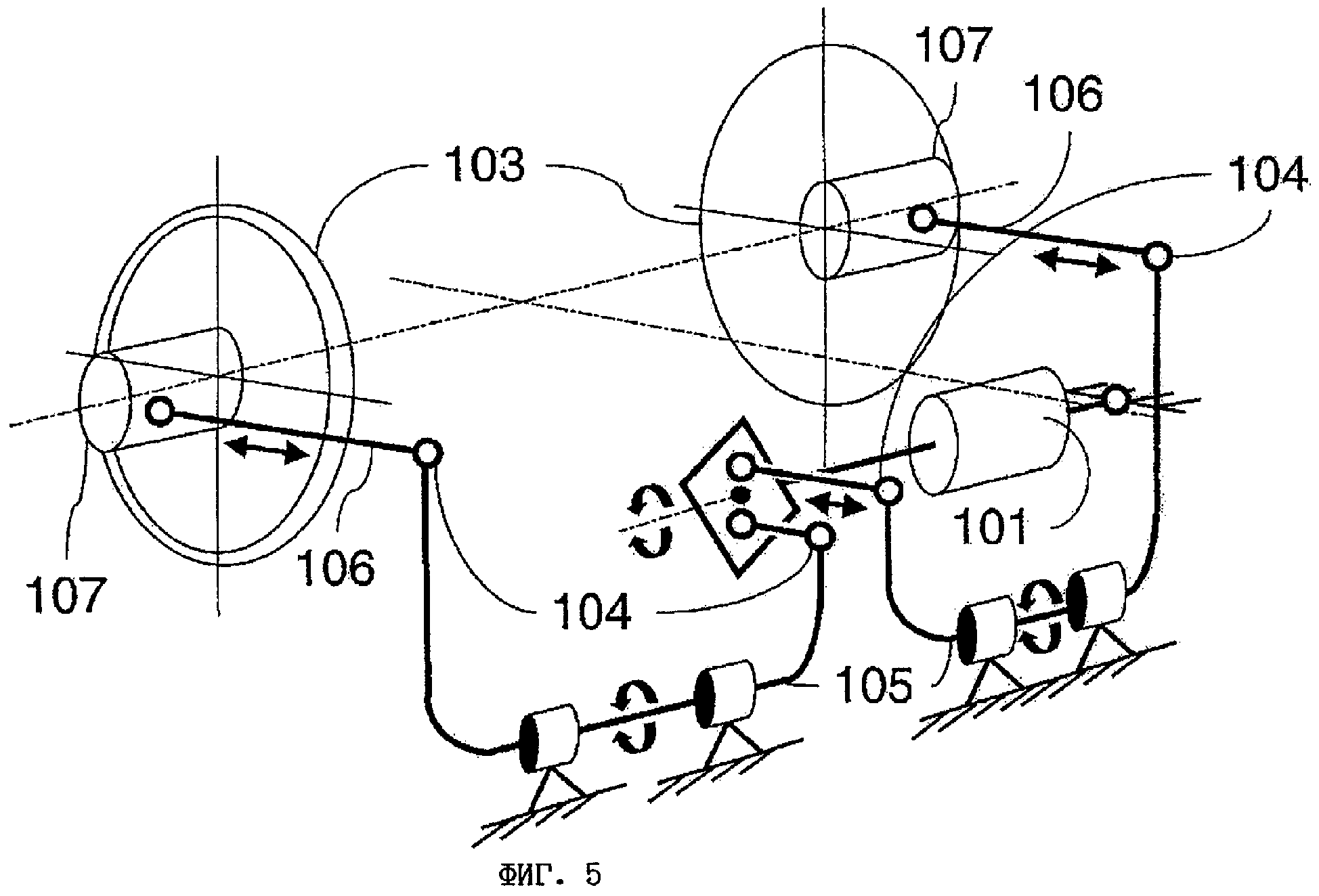
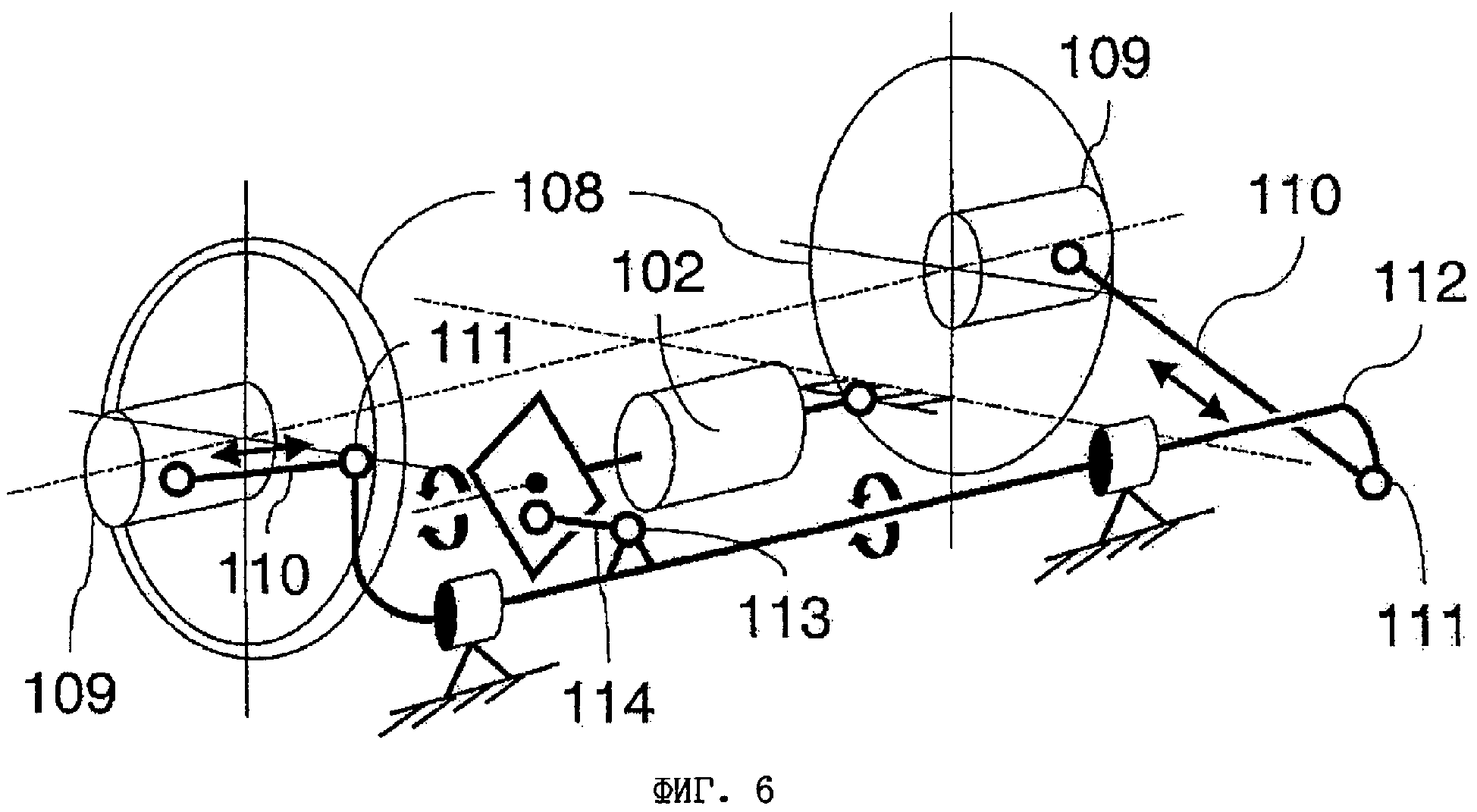
На фиг.5 и 6 показаны отдельные колесные узлы ходовой части, соответственно транспортного средства, каждый из которых оснащен одним сервоприводом 101, 102.
В показанном на фиг.5 варианте вращательный сервопривод 101 одновременно обеспечивает кинематическое соединение между собой обоих колес 103 через соответствующие шарниры 104, через поворотные валы 105, концы которых загнуты под углом 90° и которые могут поворачиваться вокруг своей продольной оси, через направляющие тяги 106 и через буксы 107. В соответствии с этим сервопривод 101 управляет установкой обоих колес 103 в требуемое положение в процессе регулирования устойчивости и одновременно с этим обеспечивает поворот колес 103 вокруг вертикальной оси. Иными словами, сервопривод в этом случае реализует одновременно первые и вторые установочные движения.
На фиг.6 показаны два колеса 108, соответствующие которым буксы 109 кинематически связаны между собой через направляющие тяги 110, шарниры 111 и через поворотный вал 112, концы которого загнуты под углом 90° во взаимно противоположных направлениях и который может поворачиваться вокруг своей продольной оси. Между загнутыми концами поворотного вала 112 с ним шарниром 113 и направляющей тягой 114 соединен вращательный сервопривод 102, который позволяет поворачивать поворотный вал 112 вокруг его продольной оси и тем самым поворачивать колеса 108 вокруг вертикальной оси.
В обоих показанных на фиг.5 и 6 вариантах сервоприводы 101, 102 могут располагаться примерно по середине между колесами 103, 108. Конкретное место размещения сервоприводов подбирается в зависимости от занимаемого ими пространства, а также с учетом оптимального распределения массы отдельных компонентов конструкции.
На фиг.7 показан еще один вариант возможного кинематического соединения между собой колес 115 отдельного колесного узла. В этом случае колеса колесного узла кинематически связаны между собой через их буксы 116, через присоединенные к ним направляющие тяги 117, 118, 119, через шарниры 120 и через поворотный вал 121. Поворотный вал 121 смонтирован в закрепленных на раме подшипниках 122 с возможностью поворота в них вокруг своей продольной оси. На концах поворотного вала 121 предусмотрены рычаги 123, соединяющие его через шарниры 120 с направляющими тягами 118, 119. Обе направляющие тяги 117, 119 соединены с вращательным сервоприводом 124, который обеспечивает поворот колес 115 вокруг вертикальной оси. В соответствии с этим вращательный сервопривод 124 можно разместить сбоку от рамы.
Реферат
Изобретение относится к области рельсовых транспортных средств, в частности к устройствам для радиальной установки колес при движении по криволинейным участкам пути. Активное управление радиальной установкой колес (11) колесного узла (8, 9, 10) тележки осуществляют посредством интегрального регулирования с реализацией установочных движений в двух частотных диапазонах, сообщая колесному узлу через исполнительный механизм, управляемый регулятором, первые установочные движения в первом частотном диапазоне и вторые установочные движения во втором частотном диапазоне, отличном от первого частотного диапазона, с их наложением на первые установочные движения. Исполнительный механизм выполнен в виде сервопривода (36-41). Между исполнительным механизмом и колесом или буксой колесного узла расположен передаточный механизм. Технический результат - снижение износа колес и рельсов, устранение паразитных колебаний при стабилизации колес. 2 н. и 24 з.п. ф-лы, 7 ил.

Формула
Документы, цитированные в отчёте о поиске
Рельсовое транспортное средство с одноосной тележкой
Комментарии