Рельсовое транспортное средство с одноосной тележкой - RU2143356C1
Код документа: RU2143356C1
Чертежи

Описание
Изобретение относится к рельсовому транспортному средству согласно ограничительной части первого пункта формулы изобретения.
Известное рельсовое транспортное средство этого рода (DE 4224467 A1) состоит, по меньшей мере, из двух кузовов вагонов, установленных, по меньшей мере, на трех управляемых одноосных тележках. Управляющие сигналы для управления несколькими участвующими в движении тележками вырабатываются управляющим устройством, которое формирует управляющий сигнал из углового положения двух соседних кузовов вагонов. Управляющее устройство включает в себя при этом гидравлический исполнительный блок, который связан с тележками, и преобразует управляющий сигнал, сформированный датчиковым блоком из углового положения соседних кузовов вагонов и тем самым зависимый от радиуса кривой проходимого пути, в функционально нужный поворот соответствующей тележки вокруг вертикальной оси. Недостатком этого выполнения является сложное энергоснабжение, которое в дополнение к электрическому энергоснабжению требует гидросистемы в вагоне. К тому же ощупывание углового положения двух соседних кузовов вагонов происходит посредством механических рычажных устройств, воздействующих на соответствующие гидравлические исполнительные звенья, которые поворачивают соответствующую раму тележки в заданное положение.
В основе изобретения лежит задача принятия в рельсовом транспортном средстве согласно ограничительной части первого пункта формулы изобретения мер, обеспечивающих с помощью простых управляющих устройств надежное управление одноосной тележкой.
Эта задача решается согласно изобретению посредством отличительных признаков первого пункта формулы изобретения.
В одном выполнении рельсового транспортного средства согласно изобретению с помощью датчика-сенсора в датчико-сенсорном блоке вырабатывают происходящий непосредственно от радиуса проходимого пути электрический исходный сигнал, который происходит от актуального положения, в частности, опережающей, самоустанавливающейся на основе геометрии системы "колесо-рельс" тележки, от углового положения соседних деталей кузова вагона и т.п. Этот исходный сигнал содержит помимо соответствующей радиусу кривой, необходимой для управления полезной составляющей сигнала, также наложенные колебания, которые происходят при эксплуатации рельсового транспортного средства от колебаний между тележкой и кузовом вагона, возникающих за счет неровностей, посторонних тел, влияний силы тяги и т.п., или между используемыми в качестве основы измерений кузовами вагонов, и модулируются с зависимым от кривой полезным сигналом или накладываются на него. Для устранения подобных независимых от кривой пути помех первоначальный сигнал подается к фильтру нижних частот, предельная частота которого ниже паразитных колебаний. Оказалось, что эта предельная частота составляет менее 5 Гц и выбирается преимущественно до 0,5 Гц. Освобожденный, таким образом, от паразитных колебаний сигнал соответствует согласованному с данным радиусом проходимой кривой сигналу заданного значения, который служит в качестве квазиустановившейся задающей величины для управления взаимодействующим с управляемой тележкой исполнительным блоком.
Исполнительный блок, связанный с управляемой тележкой, в частности с ее рамой, содержит электрический регулятор и электромагнитное исполнительное звено, управляемое его действующим звеном в качестве задающей величины выходным сигналом. Это исполнительное звено механически связано с тележкой и соответствующим кузовом вагона, так что за счет перемещения исполнительного звена возможен поворот тележки вокруг ее реальной или воображаемой вертикальной оси. При использовании в качестве исполнительного звена шагового двигателя может быть достаточным преобразование выходного сигнала фильтра через регулятор в последовательность исполнительных импульсов, которая вызывает соответствующее проходимому радиусу пути угловое смещение тележки относительно соответствующего кузова вагона. Если же точное по положению управление не гарантировано, то в этом случае целесообразно предусмотреть на исполнительном звене или на тележке датчик положения, который подает электрический сигнал об актуальном установленном положении. Этот сигнал положения может подаваться в качестве фактического значения положения к электрическому компаратору, к которому в качестве заданного значения подается квазиустановившийся выходной сигнал фильтра, а из заданного и фактического значений соответственно еще компенсируемое рассогласование подается к регулятору, выходной сигнал которого в качестве регулирующей величины подается к исполнительному звену до тех пор, пока рассогласование не приблизится, по меньшей мере, приблизительно к нулю.
Датчико-сенсорный блок и, в частности, фильтр могут иметь два квазистатических сигнальных выхода, причем к каждому из этих сигнальных выходов присоединен исполнительный блок, исполнительные звенья которого сообща воздействуют на одну и ту же тележку и, в частности, на одну и ту же раму тележки. Места механического воздействия обоих исполнительных звеньев расположены при этом, в частности, по диагонали друг к другу и в зоне тележки, где находятся рессорные элементы для соединения рамы тележки с соответствующим кузовом вагона. В этой зоне предусмотрены, как обычно, первичные рессорные элементы между рамой тележки и колесными подшипниками одноосной колесной пары. Поперечная жесткость этих рессорных элементов вызывает основное ориентирование тележки вдоль продольной оси транспортного средства и допускает при эксплуатации возникающее за счет геометрии системы "колесо-рельс" ограниченное отклонение колесной пары, тогда как вынужденное за счет исполнительного звена отклонение происходит против усилия вторичных рессорных элементов. При этом реальная вертикальная ось для поворота тележки относительно кузова вагона целесообразно образована опорным шкворнем.
Соответствующее исполнительное звено выполнено, в частности, в виде линейного привода и может представлять собой линейный электродвигатель или серводвигатель со шпиндельным приводом или с планетарной передачей. Связь исполнительного звена или звеньев с тележкой или кузовом вагона происходит, в частности, упруго, для чего используются преимущественно промежуточные резинометаллические элементы, которые защищают исполнительное звено от ударных нагрузок и обеспечивают возникающие при движении необходимые маятниковые движения между рамой тележки и кузовом вагона.
Датчик-сенсор для вырабатывания зависимого от кривой пути исходного сигнала может в качестве электрического резистивного датчика взаимодействовать с шарниром сцепки между двумя кузовами вагонов и регистрировать устанавливающееся на нем при движении по кривой изменение угла поворота для первоначального сигнала в качестве переменного электрического сопротивления, в качестве значения индуктивности или емкости и т.п. Датчик-сенсор может, однако, взаимодействовать и с управляемой тележкой того же кузова вагона или опережающей или догоняющей тележкой другого кузова вагона, и на него может влиять отклонение поворота, самопроизвольно возникающее при движении по кривой за счет геометрии системы "колесо-рельс".
Изобретение
более подробно поясняется ниже с помощью принципиальных эскизов примера его
выполнения, на которых изображают:
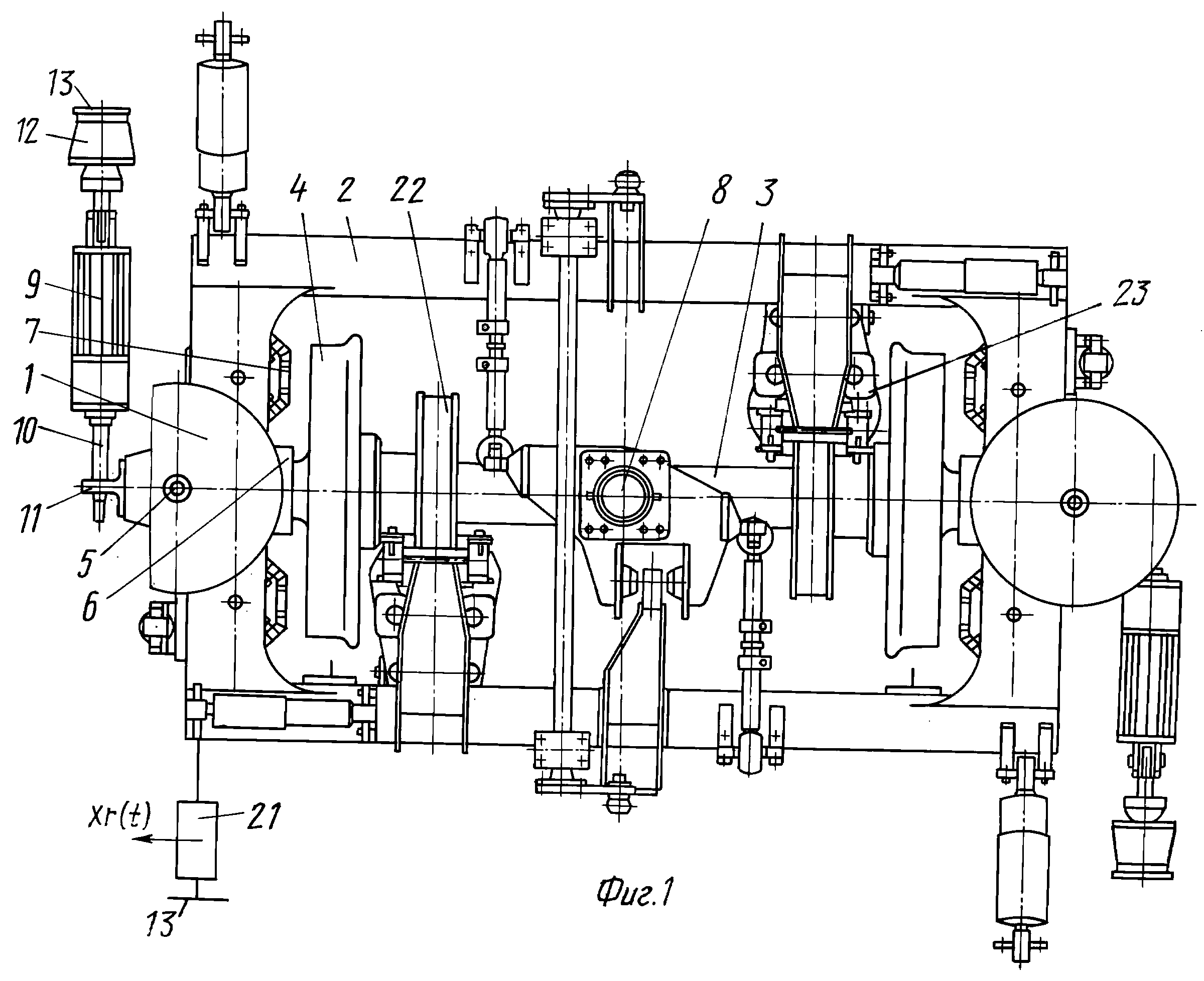
фиг. 1 - вид сверху на одноосную тележку, управляемую в
зависимости от радиуса
проходимой кривой с помощью исполнительных звеньев;
фиг. 2 - блок
управления с сенсорным блоком и исполнительными блоками для управления исполнительными звеньями.
Кузов вагона (не показан) рельсового транспортного средства установлен через вторичные рессорные элементы 1 на раме 2 тележки, содержащей только одну ось 3 с жестко закрепленными на ней колесами 4. Ось 3 колесной пары 4 лежит в вертикальной, проходящей поперек продольного направления рельсового транспортного средства плоскости, в которой расположены вертикальные средние оси 5 вторичных рессорных элементов 1, причем колесные подшипники 6 опираются и фиксированы на нижней стороне рамы 2 тележки посредством первичных рессорных элементов 7, расположенных впереди и сзади по отношению к направлению движения. Первичные рессорные элементы 7 воспринимают при этом не только усилия массы в их осевом направлении, но и в ограниченной степени обеспечивают за счет определенной поперечной упругости также возникающие за счет геометрии системы "колесо-рельс" отклонения от поворота оси 3 или рамы 2 тележки относительно кузова вагона. Поворот происходит при этом вокруг вертикальной оси 8, которая реализована опорным шкворнем, соединенным с соответствующим кузовом вагона и входящим в опорную выемку рамы 2 тележки.
Для осуществления вынужденного поворота тележки вокруг вертикальной оси 8 в зависимости от радиуса кривой соответственно проходимого отрезка пути предусмотрено исполнительное устройство из двух расположенных по диагонали и симметрично исполнительных звеньев 9, которые на соответствующей наружной стороне рамы 2 тележки находятся в зацеплении в зоне колесных подшипников 6 или вторичных рессорных элементов 1 посредством исполнительной штанги 10 с предусмотренным там рымом 11, а другим концом через элемент с резиноподобной эластичностью в качестве упругого средства 12 связи прочно соединено с жестко установленной на кузове вагона его деталью 13.
Для управления исполнительными звеньями 9 предусмотрено управляющее устройство на фиг. 2. Оно состоит из сенсорного блока 14 и двух управляемых им, одинаковых, по меньшей мере, по основной функции исполнительных блоков 15, включающих в себя соответственно одно из исполнительных звеньев 9 для принудительного поворота тележки 2, 3. Сенсорный блок 14 состоит при этом из датчика-сенсора 17, который вырабатывает зависимый от радиуса проходимой кривой пути исходный сигнал, формируемый в зависимости от другой тележки, самоустанавливающейся на основе геометрии системы "колесо-рельс", или согласованного между собой углового положения деталей кузовов соседних вагонов. После того как эти датчиковые устройства будут нагружены не только радиусом проходимого пути, но и паразитными влияниями, на зависимую от кривой составляющую сигнала будет накладываться паразитный сигнал, образующийся за счет динамики транспортного средства. Датчик-сенсор 17 вырабатывает в соответствии с этим динамический исходный сигнал w(t)dyn, который подается к фильтру 18 нижних частот с верхней предельной частотой до 5 Гц, преимущественно, однако, лишь 0,5 Гц. Составляющие более быстрых, более высокочастотных паразитных колебаний удаляются за счет этого из исходного сигнала, так что на выходе фильтра 18, имеющего преимущественно два отдельных вывода для обоих исполнительных блоков 15, имеется квазиустановившаяся задающая величина w(t), которая служит в качестве заданного значения 9. Для этого отфильтрованная задающая величина w(t) подается к регулятору 19, вырабатывающему выходной сигнал y(t) в качестве регулирующей величины для электромеханического исполнительного звена 9. В соответствии с величиной или длительностью этого выходного сигнала содержащее, в частности, электродвигатель исполнительное звено 9 производит изменение поворота, в данном случае, однако, изменение длины, управляющее тележкой 2, 3 так, что ось 3 располагается по линии радиуса проходимого отрезка пути. Для действительного достижения при этом заданного положения исполнительного звена или тележки с исполнительным звеном 9 или тележкой 2, 3 взаимодействует датчик 21 положения, который вырабатывает сигнал xr(t) положения, зависимый от поворота тележки 2, 3 или от положения исполнительной штанги 10. Этот сигнал положения подается к электрическому компаратору 20, к которому в качестве дополнительного входного сигнала подается также отфильтрованная задающая величина w(t). Сигнал положения является, таким образом, действительно достигнутым фактическим значением по отношению к заданному за счет заданного значения положению. В компараторе по обоим входным сигналам w(t) и xr(t) определяют рассогласованние, подаваемое в качестве входного сигнала xw(t) к регулятору 19. Регулятор 19 вырабатывает тем самым регулирующую величину y(t) лишь до тех пор, пока сигналы заданного и фактического значений в компараторе 20 не приведут к рассогласованию, близкому к нулю. Датчик 21 положения может быть, например, переменным электрическим резистором, который механически соединен с рамой 2 тележки и с неподвижной деталью 13 кузова вагона и подает образующийся в результате поворота тележки 2, 3 исполнительный сигнал xr(t). Сенсорный блок 14 может быть использован также для того, чтобы, например, во время испытательной поездки по заданному участку дороги в зависимости от пути ввести в память данных конфигурацию рельсов в качестве отфильтрованной задающей величины для полной длины маршрута и при дальнейших поездках по этому маршруту вызывать из этой памяти данных квазиустановившуюся задающую величину w(t) для управления исполнительными блоками 15.
В целом, благодаря выполнению управляющих элементов на электрической и электронной основе возникает экономичная и компактная конструкция при небольших средних затратах, причем для электрического энергоснабжения в распоряжение предоставлена имеющаяся в рельсовых транспортных средствах электрическая сеть. При этом электрические паразитные влияния, независимые от радиуса проходимого отрезка пути, устраняются за счет простых мер электрического фильтрования, так что точное радиальное ориентирование тележки относительно рельсов может происходить без помех, и за счет этого достигается плавный и безопасный в отношении схода с рельсов ход соответствующей тележки. При этом возможно также перенесение определяемой сенсорным блоком кривой пути более чем на одну тележку и может быть целесообразным съем с самой управляемой тележки зависимого от кривой динамического исходного сигнала, если датчик-сенсор регистрирует, например, относительное смещение между рамой 2 тележки и установленной в ней осью 3 и в соответствии с этим вызывает через исполнительные звенья на соответствующей раме тележки общее смещение тележки 2, 3 в положение поворота, в котором компенсировано возникающее за счет геометрии системы "колесо-рельс" и возможное за счет первичных рессорных элементов 7 отклонение колесной пары 3, 4 относительно соответствующей рамы 2 тележки. В целом, происходит также хорошее радиальное управление колесных пар отдельных тележек на кривой пути даже при больших расстояниях между колесными парами на кузове вагона, причем используемые управляющие средства экономичнее, чем размещение второй колесной пары, выполняющей задачи управления. В остальном ось 3 несет еще тормозные диски 22, с которыми взаимодействуют установленные на раме 2 тележки дисковые тормозные устройства 23.
Реферат
Рельсовое транспортное средство содержит одноосную тележку (2), установленную с возможностью поворота вокруг вертикальной оси (8) относительно соответствующего кузова (13) вагона и связанную с исполнительным блоком, который зависит от датчико-сенсорного блока, на который влияет радиус кривой проходимого пути. Для достижения простоты управления датчико-сенсорный блок снабжен электрическим датчиком-сенсором и подключенным электрическим фильтром нижних частот, причем после фильтра нижних частот для управления исполнительным звеном (9) в распоряжении имеется свободный от помех квазистатический выходной сигнал. Данное изобретение обеспечивает с помощью простых управляющих устройств надежное управление одноосной тележкой. 12 з.п. ф.-лы., 2 ил.
Комментарии