Система рулевого управления - RU2715963C1
Код документа: RU2715963C1
Чертежи



Описание
Область техники
Настоящее изобретение относится к системе рулевого управления по проводам, установленной на транспортных средствах.
Уровень техники
Система рулевого управления транспортного средства, сконфигурированная для руления колесами независимо от усилия задействования водителя, а именно, которая называется системой рулевого управления по проводам, активно изучалась в последние годы. Система рулевого управления, раскрытая в публикации японской патентной заявки № 2009–262609, является одним примером системы рулевого управления по проводам. Устройство рулевого управления раскрытой системы рулевого управления включает в себя две системы с учетом возникновения электрического отказа. Дополнительно, раскрытая система рулевого управления оборудуется резервным механизмом для передачи, через трос, усилия задействования водителя устройству рулевого управления.
Сущность изобретения
Для конструирования практичной системы рулевого управления по проводам, имеющей функцию отказоустойчивости, чтобы справляться с электрическим отказом, желательно, чтобы система имела дополнительную избыточность. Дополнительная избыточность системы, однако, неизбежно требует тщательно разработанной конфигурации на связи между контроллерами системы. Соответственно, один аспект настоящего изобретения направлен на систему рулевого управления по проводам, имеющую высокую практичность.
Согласно одному аспекту изобретения, система рулевого управления по проводам включает в себя двухсистемное устройство применения реактивного усилия, с тем, чтобы предоставлять две системы получения информации задействования, каждая из которых является системой для получения информации задействования и включает в себя двухсистемное устройство рулевого управления, с тем, чтобы предоставлять две системы рулевого управления колесами. Дополнительно, устройство получения информации задействования предусматривается в качестве вспомогательной системы получения информации задействования, независимо от устройства применения реактивного усилия. Дополнительно, вспомогательное устройство рулевого управления для изменения направления транспортного средства предусматривается в качестве вспомогательной системы рулевого управления колесами. В этой конфигурации, один из двух контроллеров устройства применения реактивного усилия, которые соответствуют двум системам, и один из двух контроллеров устройства рулевого управления, которые соответствуют двум системам, соединяются посредством одной выделенной линии связи. Аналогично, другой из двух контроллеров устройства применения реактивного усилия, и другой из двух контроллеров устройства рулевого управления соединяются посредством другой выделенной линии связи. Настоящая система рулевого управления по проводам дополнительно включает в себя шину связи, с которой устройство получения информации задействования соединяется, по меньшей мере, с возможностью передачи информации, и два контроллера устройства рулевого управления и вспомогательное устройство рулевого управления соединяются, по меньшей мере, с возможностью приема информации.
Система рулевого управления транспортного средства, сконструированная, как описано выше, включает в себя три системы получения информации задействования и три системы рулевого управления колесами. Другими словами, системы получения информации задействования и системы рулевого управления колесами, также являются тремя избыточными системами. Даже когда электрический отказ происходит в двух из шести систем (как сумма трех систем получения информации задействования и трех систем рулевого управления колесами), конфигурация выделенных линий связи и шины связи, описанная выше, делает возможным изменение направления транспортного средства посредством, по меньшей мере, одной системы рулевого управления колесами на основе информации задействования, полученной, по меньшей мере, в одной системе получения информации задействования. Таким образом, настоящее изобретение предоставляет возможность создания практичной системы рулевого управления транспортным средством, которая является отличной с точки зрения отказоустойчивости.
Различные формы
Будут приведены в качестве примера и объяснены различные формы настоящего изобретения. Каждая из форм нумеруется и зависит от другой формы или форм, по необходимости. Это реализовано для более легкого понимания форм настоящего изобретения, и следует понимать, что сочетания составных элементов, которые составляют настоящее изобретение, не ограничиваются элементами, описанными в последующих формах. Т.е., следует понимать, что настоящее изобретение должно истолковываться в свете последующего описания различных форм и вариантов осуществления. Следует дополнительно понимать, что, пока настоящее изобретение истолковывается таким образом, любая форма, в которой один или более составных элементов добавляется/добавляются к или удаляются из какой–либо одной из последующих форм, может считаться одной формой настоящего изобретения.
(1) Система рулевого управления по проводам, включающая в себя:
задействуемый элемент, который должен быть задействован водителем;
двухсистемное устройство применения реактивного усилия, включающее в себя два контроллера реактивного усилия, соответствующие двум системам, устройство применения реактивного усилия конфигурируется, чтобы в каждой из двух систем, получать информацию задействования, которая является информацией, относящейся к степени задействования задействуемого элемента, и прикладывает рабочее реактивное усилие к задействуемому элементу на основе информации задействования;
двухсистемное устройство рулевого управления, включающее в себя два контроллера рулевого управления, соответствующие двум системам, устройство рулевого управления конфигурируется, чтобы, в каждой из двух систем, рулить колесом на основе информации задействования;
устройство получения информации задействования, сконфигурированное, чтобы получать информацию задействования независимо от устройства применения реактивного усилия;
вспомогательное устройство рулевого управления, приспособленное для изменения направления транспортного средства, на котором установлена система рулевого управления по проводам, независимо от устройства рулевого управления;
две выделенные линии связи, одна из которых с возможностью передачи информации и с возможностью приема информации соединяет один из двух контроллеров реактивного усилия и один из двух контроллеров рулевого управления друг с другом, а другая из которых с возможностью передачи информации и с возможностью приема информации соединяет другой из двух контроллеров реактивного усилия и другой из двух контроллеров рулевого управления друг с другом; и
первую шину связи, с которой устройство получения информации задействования соединяется, по меньшей мере, с возможностью передачи информации, и с которой два контроллера рулевого управления и вспомогательное устройство рулевого управления соединяются, по меньшей мере, с возможностью приема информации.
Эта форма является основной формой настоящего изобретения. Каждая из двух систем устройства применения реактивного усилия и устройства получения информации задействования составляет систему для получения информации задействования, а именно, систему получения информации задействования. Таким образом, система рулевого управления транспортным средством этой формы включает в себя три системы получения информации задействования. Аналогично, каждая из двух систем устройства рулевого управления и вспомогательного устройства рулевого управления составляет систему для рулевого управления колесом или для изменения направления транспортного средства, а именно, систему рулевого управления колесами. Таким образом, система рулевого управления транспортного средства этой формы включает в себя три системы рулевого управления колесами. В системе рулевого управления транспортного средства этой формы контроллер одной из двух систем устройства применения реактивного усилия и контроллер одной из двух систем устройства рулевого управления соединяются посредством одной выделенной линии связи, в то время как контроллер другой из двух систем устройства применения реактивного усилия и контроллер другой из двух систем устройства рулевого управления соединяются посредством другой выделенной линии связи. Дополнительно, информация задействования от устройства получения информации задействования, которая функционирует как вспомогательная система получения информации задействования, имеет возможность передачи через шину связи контроллерам соответствующих двух систем устройства рулевого управления и вспомогательному устройству рулевого управления, которое функционирует в качестве вспомогательной системы рулевого управления колесами. Даже если какие–либо две системы среди шести систем, т.е., среди трех систем получения информации задействования и трех систем рулевого управления колесами, подвержены электрическому отказу (даже если такое событие маловероятно должно случиться фактически), рулевое управление обеспечивается посредством, по меньшей мере, одной системы рулевого управления колесами на основе информации задействования, отправленной, по меньшей мере, от одной системы получения информации задействования. Здесь, "рулевое управление" является понятием, включающим в себя изменение направления колеса и изменение направления транспортного средства.
"Задействуемый элемент" в этой форме включает в себя не только обычные рулевые колеса, но также джойстики и т.п. "Информация задействования" – это информация, относящаяся к степени задействования задействуемого элемента. "Степень задействования" – это в типичном варианте величина задействования задействуемого элемента, такая как угол задействования от нейтральной позиции. Степень задействования может быть любой другой физической величиной, используемой в рулевом управлении. Например, степень задействования включает в себя усилие задействования, прикладываемое к задействуемому элементу водителем, скорость задействования задействуемого элемента, и т.д.
"Устройство получения информации задействования" в этой форме может рассматриваться в качестве альтернативы средству получения степени задействования устройства применения реактивного усилия. В случае, когда устройство применения реактивного усилия включает в себя три системы, устройство получения информации задействования может состоять из одной из трех систем, которая отличается от вышеуказанных двух систем. Однако, устройство получения информации задействования желательно является устройством, независимым от устройства применения реактивного усилия, по причине, что такое независимое устройство маловероятно должно подвергаться влиянию электрического отказа в устройстве применения реактивного усилия. В частности, средство получения степени задействования устройства применения реактивного усилия может быть составлено следующим образом, например. В случае, когда устройство применения реактивного усилия использует электромотор в качестве источника реактивного усилия, контроллер реактивного усилия может быть сконфигурирован, чтобы получать информацию задействования на основе угла поворота мотора для электромотора, в результате чего, составляется средство получения степени задействования. В отличие от этого, устройство получения информации задействования может быть сконфигурировано, чтобы непосредственно получать степень задействования задействуемого элемента.
В случае, когда устройство рулевого управления включает в себя три системы, "вспомогательное устройство рулевого управления" в этой форме может состоять из одной из трех систем, которая отличается от вышеуказанных двух систем. Однако, желательно, чтобы вспомогательное устройство рулевого управления было устройством, приспособленным для изменения направления транспортного средства, даже когда устройство рулевого направления полностью не функционирует. Наоборот, вспомогательное устройство рулевого управления может быть устройством, которое проявляет функцию изменения направления транспортного средства, только когда устройство рулевого управления полностью не функционирует. Как объясняется позже, тормозная система транспортного средства может изменять направление транспортного средства, прикладывая, к правому и левому колесам, взаимно различающиеся величины тормозного усилия. Таким образом, тормозная система может быть вспомогательным устройством рулевого управления.
(2) Система рулевого управления по проводам согласно форме (1), в которой, по меньшей мере, один из двух контроллеров рулевого управления соединяется без возможности передачи информации с первой шиной связи.
Каждый контроллер реактивного усилия и каждый контроллер рулевого управления типично состоят из компьютера и схем возбуждения для устройств (таких как источник возбуждения, актуатор и т.д.), и компьютер выполняет обмен информацией. Каждое из устройства получения информации задействования и вспомогательного устройства рулевого управления включает в себя контроллер. Контроллер включает в себя компьютер, и компьютер выполняет обмен информацией. Отказ контроллера включает в себя отказ компьютера. В случае, когда компьютер подвержен отказу, неупорядоченное явление передачи, как ожидается, должно происходить, как позже объясняется подробно. В явлении неупорядоченной передачи компьютер выдает или сбрасывает массивные объемы бессмысленной информации. В случае, когда компьютер соединяется с шиной связи, так что компьютер может предоставлять информацию в шину связи, отказ компьютера, который подразумевает явление неупорядоченной передачи, может вызывать неправильную работу шины связи вследствие массивных объемов бессмысленной информации, подаваемой в нее. Согласно этой форме, один или два контроллеров рулевого управления конфигурируются, чтобы не подавать информацию в первую шину связи. Таким образом, даже когда контроллер/контроллеры рулевого управления подвержен отказу, который подразумевает явление неупорядоченной передачи, эта форма делает возможным предотвращение неправильной работы первой шины связи вследствие отказа.
(3) Система рулевого управления по проводам согласно форме (1) или (2), дополнительно включающая в себя вторую шину связи, с которой два контроллера реактивного усилия и вспомогательное устройство рулевого управления соединяются.
(4) Система рулевого управления по проводам согласно форме (3), при этом, по меньшей мере, один из двух контроллеров реактивного усилия соединяется без возможности передачи информации со второй шиной связи.
Согласно системе рулевого управления вышеуказанных двух форм, информация задействования, полученная посредством одного из двух контроллеров реактивного усилия, может быть использована в рулевом управлении, выполняемом посредством вспомогательного устройства рулевого управления. Дополнительно, информация, которая протекает через вторую шину связи, может быть использована в управлении для рабочего реактивного усилия посредством каждого из двух контроллеров реактивного усилия. Согласно последней форме, вторая шина связи может сохранять функционирование или работать, даже когда электрический отказ, который подразумевает явление неупорядоченной передачи, происходит, по меньшей мере, в одном контроллере реактивного усилия, который соединяется без возможности передачи информации со второй шиной связи.
(5) Система рулевого управления по проводам согласно какой–либо одной из форм (1)–(4), дополнительно включающая в себя третью шину связи, с которой соединяются каждый из двух контроллеров реактивного усилия, каждый из двух контроллеров рулевого управления и вспомогательное устройство рулевого управления.
(6) Система рулевого управления по проводам согласно форме (5), при этом, по меньшей мере, один из: по меньшей мере, одного из двух контроллеров реактивного усилия; и, по меньшей мере, один из двух контроллеров рулевого управления соединяется без возможности передачи информации с третьей шиной связи.
Вышеуказанные две формы предоставляют возможность связи между контроллером реактивного усилия и контроллером рулевого управления, которые не соединяются посредством выделенной линии связи. Таким образом, даже когда выделенная линия связи не функционирует или не работает, информация задействования, полученная контроллером реактивного усилия, может быть использована в управлении для рулевого управления контроллером рулевого управления, и информация рулевого управления (которая будет позже объяснена), полученная контроллером рулевого управления, может быть использована в управлении рабочим реактивным усилием контроллером реактивного усилия. Кроме того, с помощью информации, принятой через третью шину связи, каждый контроллер реактивного усилия может выполнять управление реактивным усилием, и каждый контроллер рулевого управления может выполнять рулевое управление. Согласно последней из вышеуказанных двух форм, даже когда контроллер, который соединяется без возможности передачи информации с третьей шиной связи, подвержен отказу, которая подразумевает явление неупорядоченной передачи, функция третьей шины связи может быть сохранена.
(7) Система рулевого управления по проводам согласно какой–либо одной из форм (1)–(6), дополнительно включающая в себя: вторую шину связи, с которой соединяются каждый из двух контроллеров реактивного усилия и вспомогательное устройство рулевого управления; и третью шину связи, с которой соединяются каждый из двух контроллеров реактивного усилия, каждый из двух контроллеров рулевого управления и вспомогательное устройство рулевого управления,
при этом один из двух контроллеров рулевого управления соединяется без возможности передачи информации с первой шиной связи и соединяется с возможностью передачи информации и возможностью приема информации с третьей шиной связи, в то время как другие два контроллера рулевого управления соединяются с возможностью передачи информации и возможностью приема информации с первой шиной связи и соединяются без возможности передачи информации с третьей шиной связи,
при этом один из двух контроллеров реактивного усилия соединяется без возможности передачи информации со второй шиной связи и соединяется с возможностью передачи информации и возможностью приема информации с третьей шиной связи, в то время как другие два контроллера реактивного усилия соединяются с возможностью передачи информации и возможностью приема информации со второй шиной связи и соединяются без возможности передачи информации с третьей шиной связи.
Эта форма является особой формой, относящейся к системе рулевого управления настоящего варианта осуществления, которая будет позже объяснена. Действие и достоинства системы рулевого управления будут описаны в разделе "Подробное описание варианта осуществления".
(8) Система рулевого управления по проводам согласно какой–либо одной из форм (1)–(7), при этом вспомогательное устройство рулевого управления является тормозной системой, установленной на транспортном средстве, на котором установлена система рулевого управления по проводам, и приспособлено для применения тормозного усилия к правому и левому колесам независимо друг от друга.
Эта форма является формой, для которой особые отличительные признаки добавлены к вспомогательному устройству рулевого управления. В этой форме внешняя система функционирует как вспомогательное устройство рулевого управления. Направление транспортного средства может быть изменено посредством соответствующего применения, к правому и левому колесам, тормозных усилий, имеющих взаимно различающиеся величины. Таким образом, тормозная система может рулить транспортным средством в экстренных обстоятельствах, в которых устройство рулевого управления не функционирует. В этом смысле, тормозная система может быть устройством экстренного рулевого управления.
(9) Система рулевого управления по проводам согласно какой–либо одной из форм (1)–(8),
при этом двухсистемное устройство рулевого управления конфигурируется, чтобы, в каждой из двух систем, получать информацию рулевого управления, которая является информацией, относящейся к степени руления колеса, и
при этом двухсистемное устройство применения реактивного усилия конфигурируется, чтобы, в каждой из двух систем, управлять рабочим реактивным усилием на основе информации рулевого управления.
"Информация рулевого управления" в этой форме является информацией, относящейся к степени руления. "Степень руления" включает в себя усилие, требуемое для рулевого управления (т.е., нагрузки рулевого управления), скорость рулевого управления, и т.д., в дополнение к величине руления колеса. Выполнение управления рабочим реактивным усилием посредством контроллера реактивного усилия на основе нагрузки рулевого управления предоставляет возможность водителю почувствовать нагрузку. В случае, когда информация рулевого управления имеет возможность передачи от контроллера рулевого управления контроллеру реактивного усилия по шине связи, управление рабочим реактивным усилием на основе информации рулевого управления имеет возможность выполняться даже в случае отказа, в котором выделенная линия связи не функционирует или не работает.
(10) Система рулевого управления по проводам по какой–либо одной из форм (1)–(9), при этом устройство применения реактивного усилия двух систем конфигурируется, чтобы, в каждой из двух систем, управлять рабочим реактивным усилием на основе информации о скорости транспортного средства, которая является информацией, относящейся к скорости движения транспортного средства, на котором установлена система рулевого управления по проводам.
Согласно системе рулевого управления этой формы, когда скорость движения транспортного средства является высокой, рабочее реактивное усилие становится большим, чтобы, тем самым, предотвращать избыточное действие рулевого управления водителя, с тем, чтобы улучшать устойчивость транспортного средства в движении по прямой, например. С другой стороны, когда скорость движения транспортного средства является низкой, рабочее реактивное усилие становится небольшим, с тем, чтобы предоставлять возможность легкой управляемости или хорошей маневренности для водителя.
(11) Система рулевого управления по проводам согласно какой–либо одной из форм (1)–(10), двухсистемное устройство рулевого управления конфигурируется, чтобы, в каждой из двух систем, управлять степенью руления для колеса на основе информации о скорости транспортного средства, которая является информацией, относящейся к скорости движения транспортного средства, на котором система рулевого управления по проводам установлена.
Степень руления включает в себя величину руления для колеса. Согласно системе рулевого управления этой формы, когда скорость движения транспортного средства является высокой, отношение между величиной задействования задействуемого элемента и величиной поворота управляемого колеса (далее в данном документе называемое "передаточным числом рулевого управления" по необходимости) становится небольшим, с тем, чтобы улучшать устойчивость движения транспортного средства, например. С другой стороны, когда скорость движения транспортного средства является низкой, передаточное число рулевого управления становится большим, с тем, чтобы улучшать способность поворачивать транспортного средства.
(12) Система рулевого управления по проводам согласно форме (10) или (11), которая конфигурируется так, что информация о скорости транспортного средства протекает по первой шине связи.
(13) Система рулевого управления по проводам согласно какой–либо одной из форм (10)–(12), дополнительно содержащая вторую шину связи, с которой каждый из двух контроллеров реактивного усилия и вспомогательное устройство рулевого управления соединяются, система рулевого управления по проводам конфигурируется так, что информация о скорости транспортного средства протекает по второй шине связи.
(14) Система рулевого управления по проводам согласно какой–либо одной из форм (10)–(13), дополнительно содержащая третью шину связи, с которой каждый из двух контроллеров реактивного усилия, каждый из двух контроллеров рулевого управления и вспомогательное устройство рулевого управления соединяются, система рулевого управления по проводам конфигурируется так, что информация о скорости транспортного средства протекает по третьей шине связи.
Согласно системе рулевого управления вышеупомянутых трех форм, информация о скорости транспортного средства принимается, по меньшей мере, одним из: контроллеров реактивного усилия; и контроллеров рулевого управления через какую–либо одну из шин связи. В случае, когда информация о скорости транспортного средства реализуется с возможностью протекать через множество шин связи, по меньшей мере, один из: контроллеров реактивного усилия; и контроллеров рулевого управления; может получать информацию о скорости транспортного средства через некоторую шину связи, которая функционирует, даже если какая–либо одна из шин связи не функционирует.
(15) Система рулевого управления по проводам согласно какой–либо одной из форм (10)–(14), при этом информация о скорости транспортного средства содержит информацию, отправленную от тормозной системы, установленной на транспортном средстве, на котором установлена система рулевого управления по проводам.
(16) Система рулевого управления по проводам согласно какой–либо одной из форм (10)–(15), при этом информация о скорости транспортного средства содержит информацию, отправленную от системы привода транспортного средства, установленной на транспортном средстве, на котором установлена система рулевого управления по проводам.
Обычные тормозные системы включают в себя датчик скорости колеса для обнаружения скорости вращения колеса. Дополнительно, система привода транспортного средства, установленная на гибридных транспортных средствах, часто включает в себя датчик скорости вращения для обнаружения скорости вращения двигателя и датчик скорости вращения для обнаружения скорости вращения электромотора. В вышеописанных двух формах информация о скорости транспортного средства, отправленная, по меньшей мере, от одной из тормозной системы и системы привода транспортного средства, протекает по шинам связи. В случае, когда информация о скорости транспортного средства, отправленная от тормозной системы и системы привода транспортного средства, выполняется с возможностью протекать по шинам связи, информация о скорости транспортного средства, отправленная от одной из тормозной системы и системы привода транспортного средства, может быть использована, по меньшей мере, одним из: контроллеров реактивного усилия; и контроллеров рулевого управления, даже когда информация о скорости транспортного средства не протекает от другой из тормозной системы и системы привода транспортного средства.
Краткое описание чертежей
Цели, признаки, преимущества и техническая и промышленная значимость настоящего раскрытия сущности должны лучше пониматься посредством прочтения нижеприведенного подробного описания варианта осуществления при рассмотрении в связи с прилагаемыми чертежами, на которых:
Фиг. 1 – вид, схематично иллюстрирующий систему рулевого управления согласно одному варианту осуществления и общую структуру транспортного средства, на котором система рулевого управления установлена;
Фиг. 2 – вид в поперечном разрезе рулевого актуатора устройства рулевого управления системы рулевого управления согласно варианту осуществления;
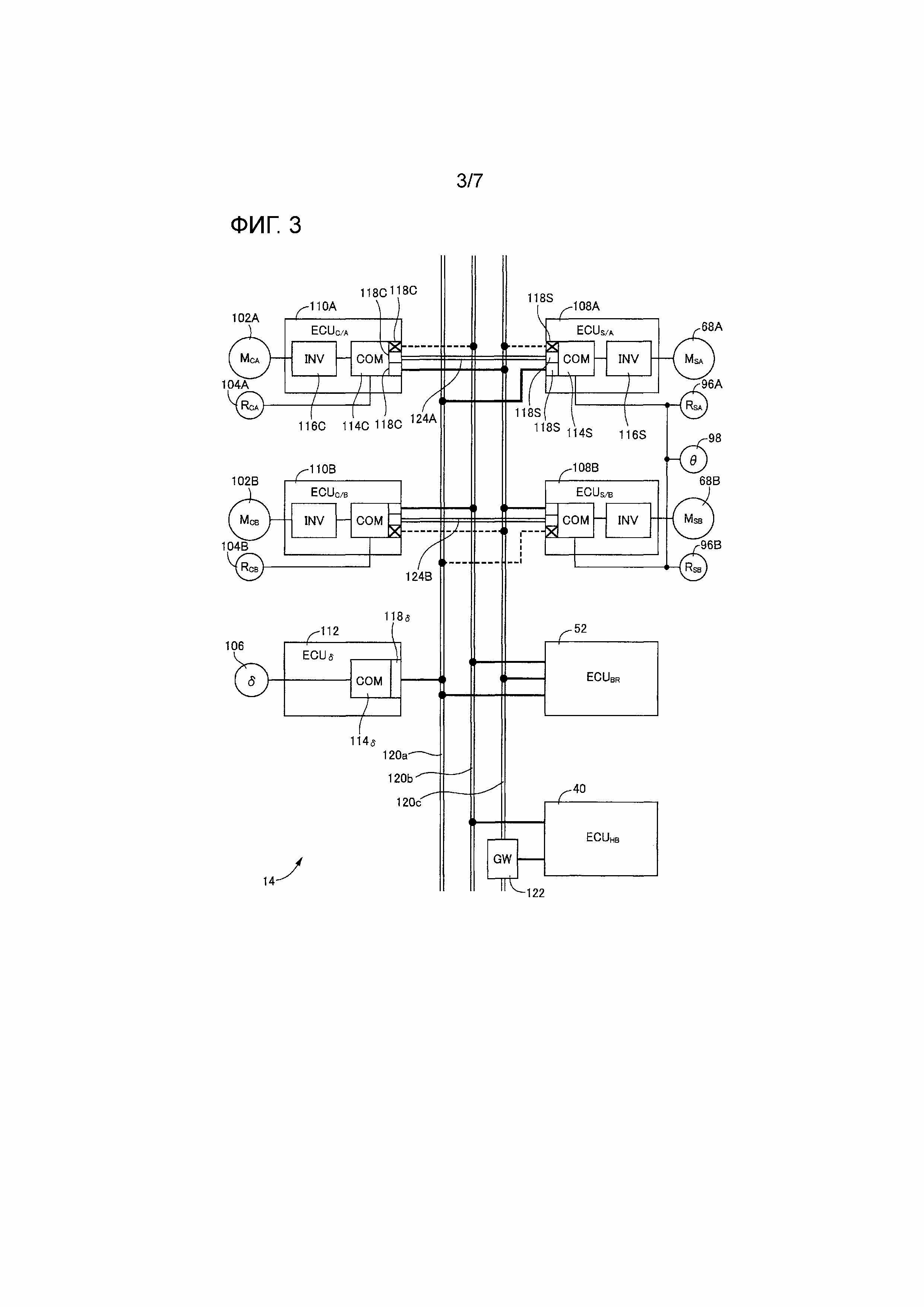
Фиг. 3 – блок–схема, иллюстрирующая конфигурацию, относящуюся к управлению системы рулевого управления согласно варианту осуществления;
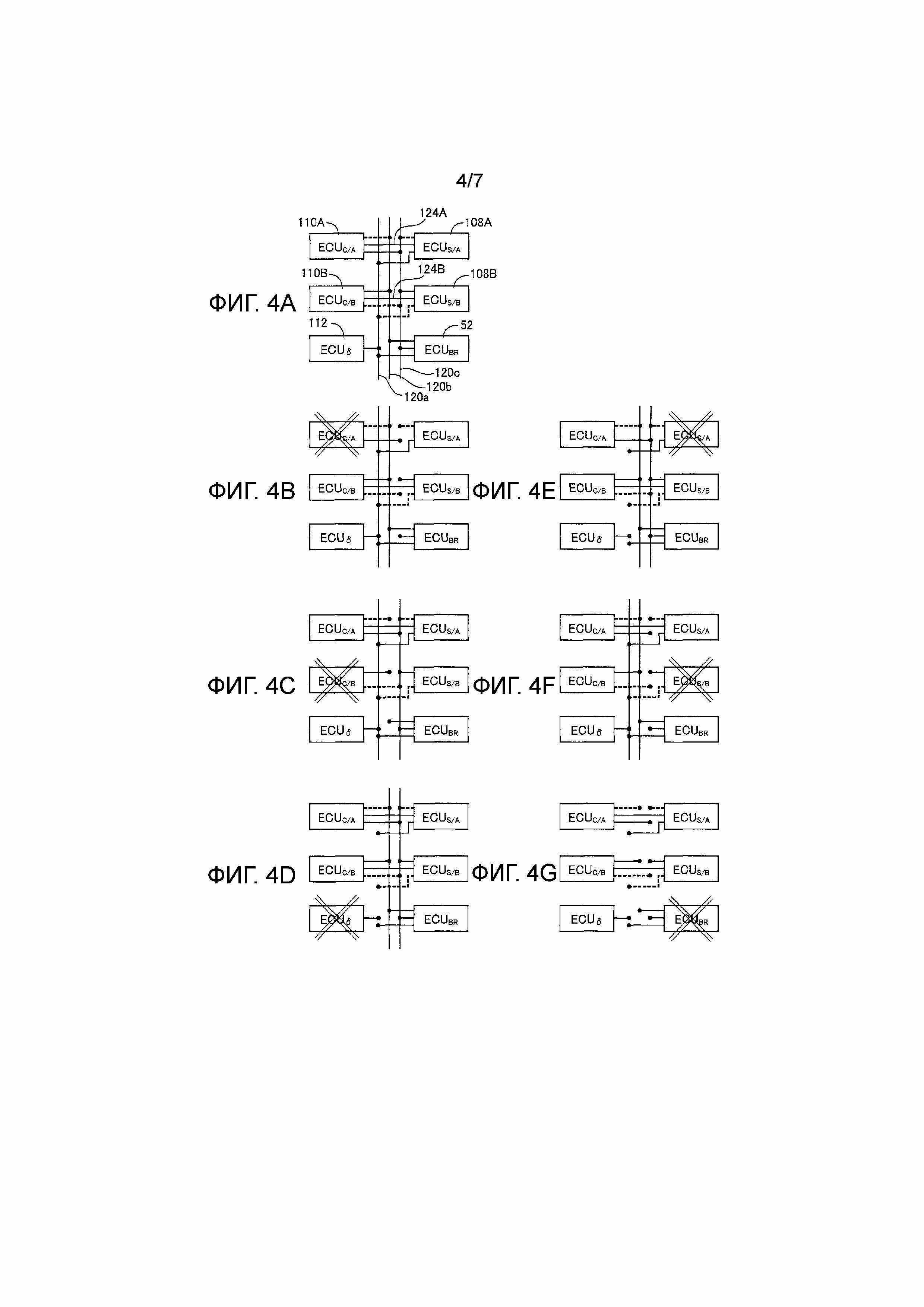
Фиг. 4A – схематичный вид для объяснения состояния связи между электронными блоками управления системы рулевого управления согласно варианту осуществления в случае, когда ни один из электронных блоков управления не находится в состоянии отказа;
Фиг. 4B – схематичный вид для объяснения состояния связи между электронными блоками управления системы рулевого управления согласно варианту осуществления в случае, когда один из двух электронных блоков управления реактивным усилием устройства применения реактивного усилия находится в состоянии отказа;
Фиг. 4C – схематичный вид для объяснения состояния связи между электронными блоками управления системы рулевого управления согласно варианту осуществления в случае, когда другой из двух электронных блоков управления устройства применения реактивного усилия находится в состоянии отказа;
Фиг. 4D – схематичный вид для объяснения состояния связи между электронными блоками управления системы рулевого управления согласно варианту осуществления в случае, когда электронный блок управления устройства получения информации задействования находится в состоянии отказа;
Фиг. 4E – схематичный вид для объяснения состояния связи между электронными блоками управления системы рулевого управления согласно варианту осуществления в случае, когда один из двух электронных блоков управления устройства рулевого управления находится в состоянии отказа;
Фиг. 4F – схематичный вид для объяснения состояния связи между электронными блоками управления системы рулевого управления согласно варианту осуществления в случае, когда другой из двух электронных блоков управления устройства рулевого управления находится в состоянии отказа;
Фиг. 4G – схематичный вид для объяснения состояния связи между электронными блоками управления системы рулевого управления согласно варианту осуществления в случае, когда электронный блок управления вспомогательного устройства рулевого управления находится в состоянии отказа;
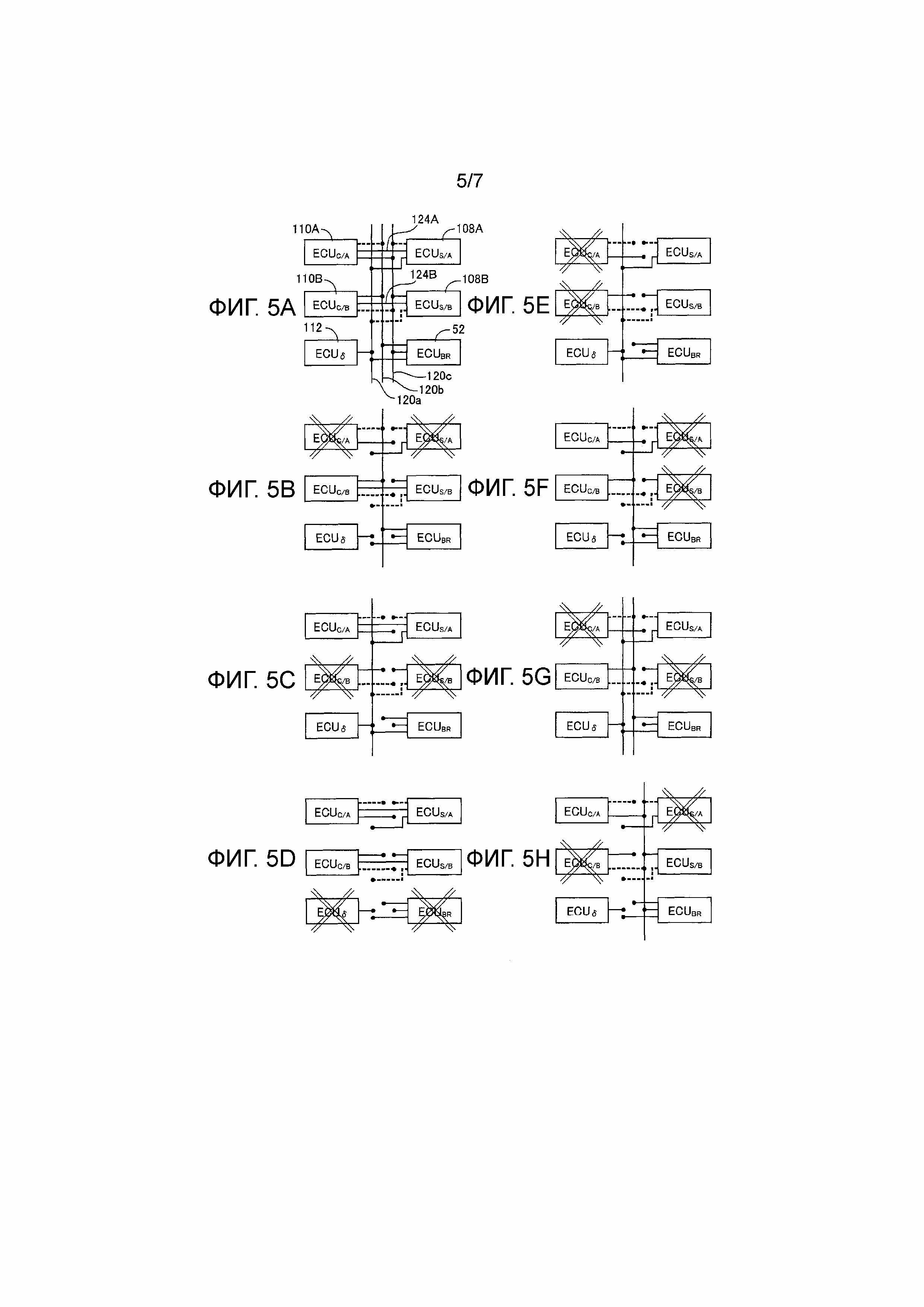
Фиг. 5A – схематичный вид для объяснения состояния связи между электронными блоками управления системы рулевого управления согласно варианту осуществления в случае, когда ни один из электронных блоков управления не находится в состоянии отказа;
Фиг. 5B – схематичный вид для объяснения состояния связи между электронными блоками управления системы рулевого управления согласно варианту осуществления в случае, когда один из двух электронных блоков управления устройства применения реактивного усилия и один из двух электронных блоков управления устройства рулевого управления находятся в состоянии отказа;
Фиг. 5C – схематичный вид для объяснения состояния связи между электронными блоками управления системы рулевого управления согласно варианту осуществления в случае, когда другой из двух электронных блоков управления устройства применения реактивного усилия и другой из двух электронных блоков управления устройства рулевого управления находятся в состоянии отказа;
Фиг. 5D – схематичный вид для объяснения состояния связи между электронными блоками управления системы рулевого управления согласно варианту осуществления в случае, когда электронный блок управления устройства получения информации задействования и электронный блок управления вспомогательного устройства рулевого управления находятся в состоянии отказа;
Фиг. 5E – схематичный вид для объяснения состояния связи между электронными блоками управления системы рулевого управления согласно варианту осуществления в случае, когда оба электронных блока управления устройства применения реактивного усилия находятся в состоянии отказа;
Фиг. 5F – схематичный вид для объяснения состояния связи между электронными блоками управления системы рулевого управления согласно варианту осуществления в случае, когда оба электронных блока управления устройства рулевого управления находятся в состоянии отказа;
Фиг. 5G – схематичный вид для объяснения состояния связи между электронными блоками управления системы рулевого управления согласно варианту осуществления в случае, когда один из двух электронных блоков управления устройства применения реактивного усилия и другой из двух электронных блоков управления устройства рулевого управления находятся в состоянии отказа;
Фиг. 5H – схематичный вид для объяснения состояния связи между электронными блоками управления системы рулевого управления согласно варианту осуществления в случае, когда другой из двух электронных блоков управления устройства применения реактивного усилия и один из двух электронных блоков управления устройства рулевого управления находятся в состоянии отказа;
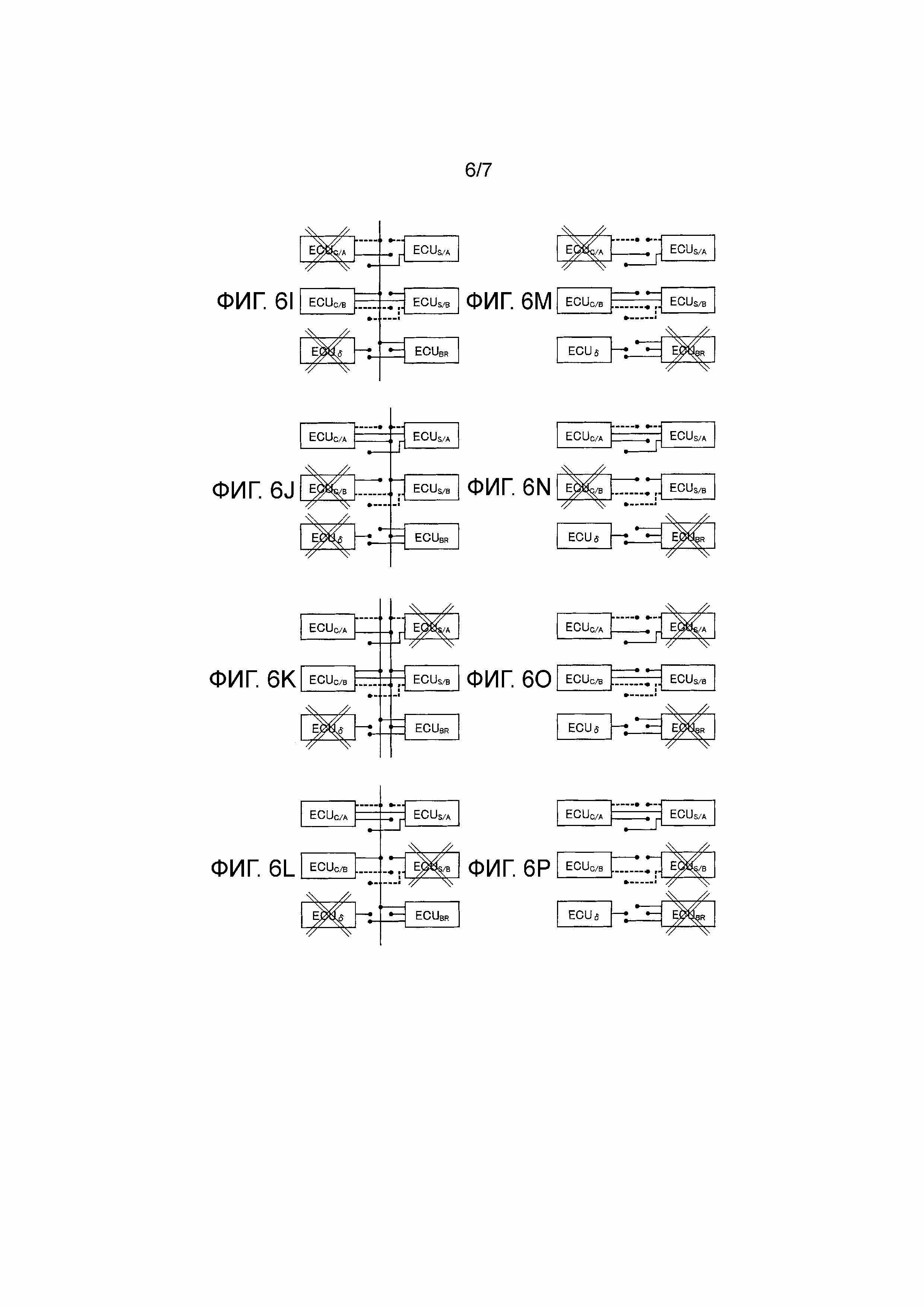
Фиг. 6I – схематичный вид для объяснения состояния связи между электронными блоками управления системы рулевого управления согласно варианту осуществления в случае, когда один из двух электронных блоков управления устройства применения реактивного усилия и электронный блок управления устройства получения информации задействования находятся в состоянии отказа;
Фиг. 6J – схематичный вид для объяснения состояния связи между электронными блоками управления системы рулевого управления согласно варианту осуществления в случае, когда другой из двух электронных блоков управления устройства применения реактивного усилия и электронный блок управления устройства получения информации задействования находятся в состоянии отказа;
Фиг. 6K – схематичный вид для объяснения состояния связи между электронными блоками управления системы рулевого управления согласно варианту осуществления в случае, когда электронный блок управления устройства получения информации задействования и один из двух электронных блоков управления устройства рулевого управления находятся в состоянии отказа;
Фиг. 6L – схематичный вид для объяснения состояния связи между электронными блоками управления системы рулевого управления согласно варианту осуществления в случае, когда электронный блок управления устройства получения информации задействования и другой из двух электронных блоков управления устройства рулевого управления находятся в состоянии отказа;
Фиг. 6M – схематичный вид для объяснения состояния связи между электронными блоками управления системы рулевого управления согласно варианту осуществления в случае, когда один из двух электронных блоков управления устройства применения реактивного усилия и электронный блок управления вспомогательного устройства рулевого управления находятся в состоянии отказа;
Фиг. 6N – схематичный вид для объяснения состояния связи между электронными блоками управления системы рулевого управления согласно варианту осуществления в случае, когда другой из двух электронных блоков управления устройства применения реактивного усилия и электронный блок управления вспомогательного устройства рулевого управления находятся в состоянии отказа;
Фиг. 6O – схематичный вид для объяснения состояния связи между электронными блоками управления системы рулевого управления согласно варианту осуществления в случае, когда один из двух электронных блоков управления устройства рулевого управления и электронный блок управления вспомогательного устройства рулевого управления находятся в состоянии отказа;
Фиг. 6P – схематичный вид для объяснения состояния связи между электронными блоками управления системы рулевого управления согласно варианту осуществления в случае, когда другой из двух электронных блоков управления устройства рулевого управления и электронный блок управления вспомогательного устройства рулевого управления находятся в состоянии отказа; и
Фиг. 7 – блок–схема, иллюстрирующая конфигурацию, относящуюся к управлению системы рулевого управления согласно модификации.
Подробное описание варианта осуществления изобретения
Обращаясь к чертежам, будет объяснена ниже подробно система рулевого управления согласно одному варианту осуществления настоящего изобретения. Следует понимать, что настоящее изобретение не ограничивается деталями последующего варианта осуществления, но может быть осуществлено на основе форм, описанных в разделе "Различные формы", и может быть изменено и модифицировано на основе знания специалистов в области техники.
A. Общая структура транспортного средства, на котором установлена система рулевого управления варианта осуществления
Система рулевого управления по проводам согласно настоящему варианту осуществления устанавливается на транспортном средстве 10, иллюстрированном на фиг. 1, например. Транспортное средство 10 имеет четыре колеса, т.е., передние правое и левое колеса и задние правое и левое колеса. Передние правое и левое колеса 12, иллюстрированные на фиг. 1, являются управляемыми колесами, и система 14 рулевого управления транспортного средства рулит двумя передними колесами 12. В последующем объяснении термин "колеса 12" будет использоваться по необходимости без выполнения различия между передними колесами и задними колесами. Транспортное средство 10 является транспортным средством с приводом на передние колеса, и два передних колеса 12 являются ведущими колесами. Система 16 привода гибридного транспортного средства устанавливается на транспортное средство 10, чтобы вращать с возможностью приведения в движение два передних колеса 12. Дополнительно, гидравлическая тормозная система 18 устанавливается на транспортное средство 10, чтобы останавливать вращение четырех колес 12. Система 14 рулевого управления транспортного средства будет позже объяснена подробно. Здесь, система 16 привода транспортного средства и тормозная система 18 будут кратко объяснены.
Система 16 привода транспортного средства является известной обычной системой привода. Система 16 привода транспортного средства включает в себя двигатель 22 в качестве источника привода, генератор 24, который функционирует, главным образом, в качестве электрического генератора, механизм 26 распределения мощности, с которым двигатель 22 и генератор 24 соединяются, и электромотор 28 в качестве другого источника привода. Механизм 26 распределения мощности имеет функцию распределения вращения двигателя 22 на вращение генератора 24 и вращение выходного вала. Электромотор 28 соединяется с выходным валом через редукционный механизм 30, функционирующий в качестве редуктора скорости. Вращение выходного вала передается передним правому и левому колесам 12 через дифференциальный механизм 32 и соответствующие приводные валы 34L, 34R, так что передние правое и левое колеса 12 вращаются с возможностью передачи приводного усилия. Генератор 24 соединяется с аккумулятором 38 через инвертор 36G. Электроэнергия, полученная посредством генерации электрической мощности посредством генератора 24, накапливается в аккумуляторе 38. Электромотор 28 соединяется с аккумулятором 38 через инвертор 36M. Электромотор 28 и генератор 24 управляются посредством управления инвертора 36M и инвертора 36G, соответственно. Управление величиной заряда аккумулятора 38 и управление инвертором 36M и инвертором 36G выполняются посредством гибридного электронного блока 40 управления в качестве контроллера, который включает в себя компьютер и схемы возбуждения (устройства возбуждения) устройств системы привода транспортного средства. Гибридный электронный блок 40 управления будет далее в данном документе называться "гибридным ECU 40" по необходимости.
Когда транспортное средство замедляется, электромотор 28 вращается посредством вращения передних колес 12 без получения мощности, подаваемой от аккумулятора 38. Электромотор 28 генерирует электрическую мощность с помощью электродвижущей силы, формируемой посредством его вращения, и сформированная электрическая мощность накапливается, через инвертор 36M, в аккумуляторе 38 как величина электричества (которая может также называться величиной электричества или электрическим зарядом). Вращение передних колес 12 замедляется, т.е., транспортное средство замедляется, на степень, соответствующую энергии, которая соответствует заряженной величине электричества. В настоящем транспортном средстве система 16 привода транспортного средства функционирует также как рекуперативная тормозная система. Гибридный ECU 40 оценивает скорость вращения колес 12, а именно, скорость v движения транспортного средства 10, на основе соответствующих скоростей вращения двигателя 22, генератора 24 и электромотора 28. Гибридный ECU 40 конфигурируется, чтобы передавать оцененную скорость v движения (далее в данном документе называемую "скоростью vHB транспортного средства" по необходимости) в качестве информации о скорости транспортного средства.
Тормозная система 18 является известной обычной тормозной системой. Тормозная система 18 включает в себя педаль 42 тормоза, в качестве элемента задействования тормоза, спаренный главный цилиндр 46, соединенный с педалью 42 тормоза и сконфигурированный, чтобы повышать давление рабочей жидкости, подаваемой из резервуара 44, тормозной актуатор 48, соединенный с главным цилиндром 46, и дисковые тормозные устройства 50, предусмотренные для соответствующих четырех колес 12. Каждое дисковое тормозное устройство 50 является тормозом колеса, к которому рабочая жидкость подается от тормозного актуатора 48.
Тормозной актуатор 48 объединяет насос, электромагнитные клапаны и т.д. В обычных условиях, тормозной актуатор 48 перекрывает поток рабочей жидкости из главного цилиндра 46 и регулирует давление рабочей жидкости, которая нагнетается посредством насоса, до давления в соответствии со степенью задействования педали 42 тормоза, с тем, чтобы подавать рабочую жидкость с отрегулированным давлением к каждому дисковому тормозному устройству 50. Тормозной актуатор 48 управляется посредством электронного блока 52 управления тормозом, который включает в себя схемы возбуждения (устройства возбуждения) для насоса и электромагнитные клапаны, компьютер и т.д. Электронный блок 52 управления тормозом будет далее в данном документе называться "ECU 52 тормоза" по необходимости.
Тормозная система 18 приспособлена для индивидуального управления тормозными усилиями, формируемыми четырьмя колесами 12. Т.е., тормозная система 18 имеет функцию применения взаимно различающихся тормозных усилий к правым колесам 12 и левым колесам 12. Настоящая тормозная система 18 приспособлена, чтобы предоставлять возможность транспортному средству поворачивать вправо и влево с помощью функционирования. Таким образом, тормозная система 18 приспособлена для функционирования в качестве вспомогательного устройства рулевого управления, которое будет объяснено подробно. Каждое колесо 12 снабжается датчиком 54 скорости колеса. (Иллюстрация датчиков 54 скорости колес для задних колес пропущена). ECU 52 тормоза оценивает скорость v движения транспортного средства 10 на основе скоростей vR вращения колес, обнаруживаемых посредством соответствующих датчиков 54 скорости колеса, и является приспособленным для передачи оцененной скорости v движения (далее в данном документе называемой "скоростью vBR транспортного средства" по необходимости) в качестве информации о скорости транспортного средства.
B. Общая структура системы рулевого управления варианта осуществления
Система 14 рулевого управления транспортного средства согласно варианту осуществления является системой, которая называется системой рулевого управления по проводам и включает в себя рулевое колесо 60 в качестве задействуемого элемента рулевого управления, устройство 62 применения реактивного усилия, сконфигурированное, чтобы применять рабочее реактивное усилие к рулевому колесу 60, и устройство 64 рулевого управления, сконфигурированное, чтобы рулить колесами 12.
Каждое колесо 12 удерживается с возможностью вращения посредством соответствующего поворотного кулака 66, который поддерживается с возможностью вращения посредством кузова транспортного средства через соответствующее оборудование подвески. Устройство 64 рулевого колеса включает в себя: рулевой актуатор 72, включающий в себя мотор 68 рулевого управления (т.е., электромотор в качестве источника привода) и сконфигурированный, чтобы перемещать рулевую тягу 70 в поперечном направлении; и соединительные тяги 74, один конец каждой из которых соединяется с соответствующим одним из противоположных концов рулевой тяги 70 через шаровое соединение. Другой конец каждой соединительной тяги 74 соединяется, через шаровое соединение, с рычагом поворотного кулака для соответствующего поворотного кулака 66. Поворотные кулаки 66 поворачиваются посредством перемещения рулевой тяги 70 в поперечном направлении, в результате чего колеса 12 управляются рулем.
Обращаясь также к фиг. 2, будет объяснен рулевой актуатор 72. Как показано на фиг. 2, рулевой актуатор 72 удерживает, в своем корпусе 76, рулевую тягу 70, так что рулевая тяга 70 является неповоротной вокруг своей оси и подвижной в поперечном направлении. Винтовая канавка 78 формируется по внешней окружности рулевой тяги 70. Удерживающая муфта 80 удерживается в корпусе 76, так, чтобы быть поворачиваемой вокруг своей оси и неподвижной в поперечном направлении. Гайка 82, удерживающая шарики подшипника, неподвижно удерживается посредством удерживающей муфты 80. Гайка 82 и рулевая тяга 70 зацепляются с помощью резьбы друг с другом и составляют шариковинтовой механизм. Мотор 68 рулевого управления располагается снаружи корпуса 76, так что его ось является параллельной оси рулевой тяги 70. Шкив 86 синхронизации присоединяется к дальнему концу вала 84 мотора. Аналогично шкиву 86 синхронизации, удерживающая муфта 80 включает в себя зацепляющие зубцы 88, сформированные на своей внешней окружности. Таким образом, удерживающая муфта 80 функционирует в качестве другого шкива синхронизации, который спаривается со шкивом 86 синхронизации. Зубчатый ремень 90 наматывается вокруг удерживающей муфты 80 и шкива 86 синхронизации. Вращение мотора 68 рулевого управления, строго говоря, вращение вала 84 мотора, вынуждает гайку 82 вращаться, так что рулевая тяга 70 перемещается вправо или влево в соответствии с направлением вращения мотора 68 рулевого управления.
Мотор 68 рулевого управления является трехфазным бесщеточным DC–мотором, например, и включает в себя две системы. В частности, магниты 92, общие для обеих систем, прикрепляются к внешней окружности вала 84 мотора, так, чтобы размещаться в круговом направлении, и два набора катушек, соответствующих соответственным двум системам, т.е., набор катушек 94A и набор катушек 94B, предусматриваются так, чтобы быть противоположными магнитам 92. Мотор 68 рулевого управления вращается посредством подачи электрического тока к одному или обоим из двух наборов катушек 94A, 94B. Крутящий момент, создаваемый мотором 68 рулевого управления, а именно, усилие, которое перемещает рулевую тягу 70 в поперечном направлении, в целом, является пропорциональным сумме электрических токов, подаваемых к катушкам 94A, 94B. Мотор 68 рулевого управления является мотором двух систем, и рулевой актуатор 72 может, как предполагается, иметь два мотора рулевого управления. В таком случае, фрагменты мотора 68 рулевого управления, соответствующие соответствующим двум системам, будут далее в данном документе называться мотором 68A рулевого управления и мотором 68B рулевого управления ради удобства. Соответственно, моторы 68A, 68B рулевого управления могут рассматриваться в качестве двух источников привода для устройства 64 рулевого управления, а само устройство 64 рулевого управления включает в себя две системы.
Моторы 68A, 68B рулевого управления рулевого актуатора 72 соответственно включают в себя датчики 96A, 96B угла поворота мотора (каждый из которых является резольвером) согласно двум системам мотора 68 рулевого управления. Каждый датчик 96A, 96B угла поворота мотора конфигурируется, чтобы обнаруживать относительную фазу между магнитами 92, присоединенными к валу 84 мотора, и катушками 94A или катушками 94B, а именно, угол RS поворота мотора, т.е., угол поворота вала 84 мотора. Аналогично рулевому актуатору устройства рулевого управления с усилителем, рулевой актуатор 72 снабжается червячно–реечным механизмом, как схематично иллюстрировано на фиг. 1. Рулевой актуатор 72 дополнительно снабжается датчиком 98 величины руления, сконфигурированным, чтобы обнаруживать угол поворота зубчатого вала червячно–реечного механизма в качестве величины перемещения рулевой тяги 70, а именно, величины θ руления колесами 12. В этом отношении, датчик 98 величины руления приспособлен для обнаружения угла поворота зубчатого вала сверх 360° из состояния, в котором рулевая тяга 70 позиционируется в нейтральной позиции (в которой колеса 12 не повернуты ни вправо, ни влево). Таким образом, датчик 98 величины руления функционирует в качестве датчика абсолютного угла. В качестве датчика 98 величины руления может быть использован датчик, аналогичный датчику, который называется датчиком рулевого управления (который будет объяснен).
Как показано на фиг. 1, устройство 62 применения реактивного усилия включает в себя: рулевой вал 100, прикрепленный к рулевому колесу 60 и поворачиваемый с помощью рулевого колеса 60; мотор 102 реактивного усилия, т.е., электромотор. Вал мотора для мотора 102 реактивного усилия объединен с рулевым валом 100, и мотор 102 реактивного усилия прикладывает крутящий момент к рулевому колесу 60. Крутящий момент функционирует в качестве реактивного усилия (рабочего реактивного усилия) относительно задействования рулевого колеса 60 водителем, т.е., операции руления. Таким образом, мотор 102 реактивного усилия функционирует в качестве актуатора реактивного усилия.
Хотя подробная структура мотора 102 реактивного усилия не иллюстрируется, мотор 102 реактивного усилия является двухсистемным бесщеточным DC–мотором, аналогично мотору 68 рулевого управления. Соответственно, устройство 62 применения реактивного усилия может считаться имеющим два мотора реактивного усилия. В этом случае, как показано на фиг. 1, фрагменты мотора 102 реактивного усилия, соответствующие соответственным двум системам, будут далее в данном документе называться мотором 102A реактивного усилия и мотором 102B реактивного усилия ради удобства. Рабочее реактивное усилие функционирует в качестве усилия, чтобы возвращать рулевое колесо 60 в нейтральную позицию (в котором рулевое колесо 60 не задействуется ни вправо, ни влево). Рабочее реактивное усилие создается посредством приложения электрического тока к одному или обоим моторам 102A, 102B реактивного усилия. Рабочее реактивное усилие имеет величину, в целом, пропорциональную сумме электрических токов, прикладываемых к моторам 102A, 102B реактивного усилия. Аналогично устройству 64 рулевого управления, устройство 62 применения реактивного усилия включает в себя две системы, соответствующие двум системам мотора 102 реактивного усилия.
Моторы 102A, 102B реактивного усилия устройства 62 применения реактивного усилия соответственно снабжаются датчиками 104A, 104B угла поворота мотора (каждый из которых является резольвером) согласно двум системам мотора 102 реактивного усилия. В качестве каждого из датчиков 104A, 104B угла поворота мотора может быть использован GMR. Каждый датчик 104A, 104B угла поворота мотора конфигурируется, чтобы обнаруживать угол RC поворота мотора для вала мотора для мотора 102 реактивного усилия, который является объединенным с рулевым валом 100. Устройство 62 применения реактивного усилия снабжается датчиком 106 величины задействования, сконфигурированным, чтобы обнаруживать величину δ задействования рулевого колеса 60. Датчик 106 величины задействования также называется датчиком рулевого управления и приспособлен для обнаружения, в качестве величины δ задействования, величины поворота рулевого колеса 60 сверх 360° из состояния, в котором рулевое колесо 60 позиционируется в нейтральной позиции (в которой рулевое колесо 60 не задействуется ни вправо, ни влево). Таким образом, датчик 106 величины задействования функционирует в качестве датчика абсолютного угла. В этом отношении, может считаться, что датчик 106 величины задействования непосредственно обнаруживает степень задействования рулевого колеса.
C. Конфигурация управления системы рулевого управления варианта осуществления
Обращаясь к фиг. 1, будет объяснена конфигурация управления настоящей системы рулевого управления. Управление для устройства 64 рулевого управления, а именно, управление для мотора 68 рулевого управления рулевого актуатора 72, выполняется посредством двух электронных блоков 108A, 108B рулевого управления (далее в данном документе называемых "ECU 108A, 10B рулевого управления" по необходимости), соответствующих двум системам. Каждый ECU 108A, 108B рулевого управления функционирует в качестве контроллера рулевого управления. В частности, ECU 108A рулевого управления управляет работой мотора 68A рулевого управления на основе угла RS поворота мотора, обнаруженного посредством датчика 96A угла поворота мотора, в то время как ECU 108B рулевого управления управляет работой мотора 68B рулевого управления на основе угла RS поворота мотора, обнаруженного посредством датчика 96B угла поворота мотора. Аналогично, управление для устройства 62 применения реактивного усилия, а именно, управление для мотора 102 реактивного усилия, выполняется посредством двух электронных блоков 110A, 110B управления реактивным усилием (далее в данном документе называемых "ECU 110A, 110B реактивного усилия" по необходимости), соответствующих двум системам. Каждый ECU 110A, 110B реактивного усилия функционирует как контроллер реактивного усилия. В частности, ECU 110A реактивного усилия управляет работой мотора 102A реактивного усилия на основе угла RC поворота мотора, обнаруженного посредством датчика 104A угла поворота мотора, в то время как ECU 110B реактивного усилия управляет работой мотора 102B реактивного усилия на основе угла RC поворота мотора, обнаруженного посредством датчика 104B угла поворота мотора. Система 14 рулевого управления транспортного средства включает в себя электронный блок 112 управления величиной задействования (далее в данном документе называемый "ECU 112 величины задействования" по необходимости) для передачи информации о величине δ задействования, обнаруженной посредством датчика 106 величины задействования.
Конфигурация управления системы 14 рулевого управления транспортного средства будет дополнительно объяснена со ссылкой на блок–схему на фиг. 3. Каждый из ECU 108A, 108B рулевого управления состоит из компьютера 114S, включающего в себя CPU, ROM, RAM и т.д., и инвертора 116S в качестве схемы возбуждения (устройства возбуждения) для соответствующего одного из мотора 68A рулевого управления и мотора 68B рулевого управления. Компьютер 114S управляет, через инвертор 116S, работой соответствующего мотора 68A, 68B рулевого управления. С компьютерами 114S соответствующих ECU 108A, 108B рулевого управления соответственно соединяются датчики 96A, 96B угла поворота мотора. Каждый ECU 108A, 108B рулевого управления имеет три порта для связи, и каждый компьютер 114S имеет три интерфейса 118S ввода/вывода, каждый функционирует как приемопередатчик, с тем, чтобы соответствовать трем портам. Каждый интерфейс 118S ввода/вывода будет далее в данном документе называться "I/O 118S" по необходимости. Компьютеры 114S для ECU 108A, 108B рулевого управления соединяются также с датчиком 98 величины руления.
Аналогично, каждый из ECU 110A, 110B реактивного усилия состоит из компьютера 114C, включающего в себя CPU, ROM, RAM и т.д., и инвертора 116C в качестве схемы возбуждения (устройства возбуждения) для соответствующего одного из мотора 102A реактивного усилия и мотора 102B реактивного усилия. Компьютер 114C управляет, через инвертор 116C, работой соответствующего мотора 102A, 102B реактивного усилия. С компьютерами 114C соответствующих ECU 110A, 110B реактивного усилия соответственно соединяются датчики 104A, 104B угла поворота мотора. Каждый ECU 110A, 110B реактивного усилия имеет три порта для связи, и каждый компьютер 114C имеет три интерфейса 118C ввода/вывода, каждый функционирует как приемопередатчик, с тем, чтобы соответствовать трем портам. Каждый интерфейс 118C ввода/вывода будет далее в данном документе называться "I/O 118C" по необходимости.
ECU 112 величины задействования включает в себя компьютер 114δ, состоящий из CPU, ROM, RAM и т.д., и компьютер 114δ соединяется с датчиком 106 величины задействования. ECU 112 величины задействования имеет один порт для связи, и компьютер 114δ имеет интерфейс 118δ ввода/вывода, функционирующий в качестве приемопередатчика, с тем, чтобы соответствовать одному порту. Интерфейс 118δ ввода/вывода будет далее в данном документе называться "I/O 118δ" по необходимости. Отметим, что ECU 112 величины задействования и датчик 106 величины задействования функционируют в качестве устройства получения информации задействования, сконфигурированного, чтобы получать, в качестве информации задействования, величину δ задействования рулевого колеса 60, независимо от устройства 62 применения реактивного усилия.
Каждый из ECU 108A, 108B рулевого управления, ECU 110A, 110B реактивного усилия и ECU 112 величины задействования соединяется, по меньшей мере, с одной из трех шин 120 связи, с тем, чтобы выполнять обмен информацией друг с другом. Когда необходимо различать три шины 120 связи друг от друга, три шины 120 связи индивидуально называются первой шиной 120a связи, второй шиной 120b связи и третьей шиной 120c связи. В частности, ECU 108A, 108B рулевого управления соединяются с первой шиной 120a связи и третьей шиной 120c связи, ECU 110A, 110B реактивного усилия соединяются со второй шиной 120b связи и третьей шиной 120c связи, и ECU 112 величины задействования соединяется с первой шиной 120a связи. ECU 52 тормоза соединяется с первой шиной 120a связи, второй шиной 120b связи и третьей шиной 120c связи. Гибридный ECU 40 соединяется со второй шиной 120b связи. Дополнительно, гибридный ECU 40 соединяется с третьей шиной 120c связи через шлюз 122.
Настоящая система 14 рулевого управления транспортного средства может рассматриваться в качестве системы рулевого управления двух систем, состоящей из: одной системы, включающей в себя мотор 68A рулевого управления, ECU 108A рулевого управления, мотор 102A реактивного усилия и ECU 110A реактивного усилия (далее в данном документе называемой "A–системой" по необходимости); и одной системы, включающей в себя мотор 68B рулевого управления, ECU 108B рулевого управления, мотор 102B реактивного усилия и ECU 110B реактивного усилия (далее в данном документе называемой "B–системой" по необходимости). Для предоставления возможности настоящей системе 14 рулевого управления транспортного средства функционировать в качестве двухсистемной системы рулевого управления, ECU 108A рулевого управления и ECU 110A реактивного усилия соединяются посредством первой выделенной линии 124A связи (далее в данном документе сокращенной как "выделенная линия 124A связи" по необходимости), в то время как ECU 108B рулевого управления и ECU 110B реактивного усилия соединяются посредством второй выделенной линии 124B связи (далее в данном документе сокращенной как "выделенная линия 124B связи" по необходимости).
D. Управление в системе рулевого управления варианта осуществления в нормальных условиях
Управление для настоящей системы 14 рулевого управления транспортного средства в нормальных условиях, а именно, управление для настоящей системы 14 рулевого управления транспортного средства, когда ни одна из двух систем (A–системы и B–системы) в системе 14 рулевого управления транспортного средства не находится в состоянии отказа, классифицируется, главным образом, на: управление реактивным усилием для управления устройством 62 применения реактивного усилия, т.е., моторами 102A, 102B реактивного усилия, посредством ECU 110A, 110B реактивного усилия; и рулевое управление для управления устройством 64 рулевого управления, т.е., моторами 68A, 68B рулевого управления, посредством ECU 108A, 108B рулевого управления. Как объяснено выше, система 14 рулевого управления транспортного средства включает в себя две системы, в которых выполняется одинаковое управление. Соответственно, последующее объяснение будет выполнено, фокусируясь на одной из двух систем. В виду этого, суффиксы "A", "B", используемые со ссылочными номерами для составных компонентов (таких как ECU 110A, 110B реактивного усилия, моторы 102A, 102B реактивного усилия, ECU 108A, 108B рулевого управления, моторы 68A, 68B рулевого управления и т.д.), удаляются. Такие компоненты будут просто представлены как ECU 110 реактивного усилия, мотор 102 реактивного усилия, ECU 108 рулевого управления, мотор 68 рулевого управления и т.д. Т.е., две системы рассматриваются как одна система. В нормальных условиях ECU 110A реактивного усилия и ECU 108A рулевого управления связываются друг с другом через выделенную линию 124A связи, в то время как ECU 110B реактивного усилия и ECU 108B рулевого управления связываются друг с другом через выделенную линию 124B связи, в соответствии с двумя системами. Таким образом, в обычных условиях, обмен данными между ECU 110 реактивного усилия и ECU 108 рулевого управления через первую–третью шины 120a–120c связи не выполняется.
i) Управление реактивным усилием
Управление реактивным усилием, выполняемое в нормальных условиях посредством ECU 110 реактивного усилия, в частности, посредством компьютера 114C ECU 110 реактивного усилия, в основном, выполняется так, что рабочее реактивное усилие FC, имеющее величину в соответствии с величиной δ задействования, прикладывается к рулевому колесу 60. Такое управление является основным управлением реактивным усилием. Другими словами, ток IC питания к мотору 102 реактивного усилия регулируется так, что усилие для возврата рулевого колеса 60 в нейтральную позицию увеличивается с увеличением величины δ задействования. Величина δ задействования вычисляется посредством накопления угла RC поворота мотора, обнаруживаемого посредством датчика 104 угла поворота мотора, предусмотренного для мотора 102 реактивного усилия. Таким образом, ECU 110 реактивного усилия захватывает величину δ задействования в текущий момент времени посредством вычисления на основе угла RC поворота мотора и определяет, на основе величины δ задействования, рабочее реактивное усилие FC, которое должно быть применено, согласно следующему выражению:
FC=αc×δ
при этом αс представляет основной коэффициент увеличения реактивного усилия.
Отметим, что величина δ задействования, захваченная посредством ECU 110 реактивного усилия в момент времени, когда транспортное средство 10 начинает работать, калибруется на основе величины δ задействования, обнаруженной посредством датчика 106 величины задействования.
В управлении реактивным усилием, выполняемом в настоящей системе 14 рулевого управления транспортного средства, ECU 110 реактивного усилия выполняет, в дополнение к основному управлению реактивным усилием, описанному выше, i) зависящее от скорости транспортного средства управление реактивным усилием на основе скорости v движения транспортного средства 10 и ii) зависящее от нагрузки рулевого управления управление реактивным усилием на основе нагрузки на устройство 64 рулевого управления, а именно, нагрузки на рулевой актуатор 72. В зависящем от скорости транспортного средства управлении реактивным усилием рабочее реактивное усилие увеличивается, чтобы вынуждать рулевое колесо 60 не действовать легко с увеличением скорости v транспортного средства. В зависящем от нагрузки рулевого управления управлении реактивным усилием, в случае, когда нагрузка на рулевой актуатор 72 становится большой, когда колеса 12 упираются в бордюр или т.п., рабочее реактивное усилие увеличивается для предоставления возможности водителю замечать увеличившуюся нагрузку. Как объяснено выше, гибридный ECU 40 и ECU 52 тормоза оценивают скорость v транспортного средства как скорость vHB транспортного средства и скорость vBR транспортного средства, соответственно. ECU 110 реактивного усилия выполняет зависящее от скорости транспортного средства управление реактивным усилием на основе информации о скорости транспортного средства относительно скоростей vHB, vBR транспортного средства, переданных от гибридного ECU 40 и ECU 52 тормоза через первую–третью шины 120a–120c связи. Как позже объясняется, ECU 108 рулевого управления определяет целевую величину θ*руления в качестве цели для величины θ руления для колес 12 и выполняет управление с обратной связью на основе отклонения Δθ (=θ – θ*) величины руления, так что фактическая величина θ руления становится равной целевой величине θ*руления. Оценивается, что нагрузка на рулевой актуатор 72, а именно, нагрузка на мотор 68 рулевого управления, является большей, когда отклонение Δθ величины руления является более значительным. На основе отклонения Δθ величины руления, переданного в качестве информации рулевого управления от ECU 108 рулевого управления, ECU 110 реактивного усилия выполняет зависящее от нагрузки рулевого управления управление реактивным усилием, так что рабочее реактивное усилие FC увеличивается с увеличением отклонения Δθ величины руления.
В дополнение к основному управлению реактивным усилием, описанному выше, ECU 110 реактивного усилия выполняет зависящее от скорости транспортного средства управление реактивным усилием и зависящее от нагрузки рулевого управления управление реактивным усилием, с тем, чтобы определять рабочее реактивное усилие FC, которое должно быть применено в управлении реактивным усилием согласно следующему выражению:
FC=αc×δ+βC×v+γC×Δθ
при этом βC представляет зависящий от скорости транспортного средства коэффициент увеличения реактивного усилия, а γC представляет зависящий от нагрузки рулевого управления коэффициент увеличения реактивного усилия.
Электрический ток IC для применения рабочего реактивного усилия FC, определенного согласно вышеописанному выражению, прикладывается от инвертора 116C к мотору 102 реактивного усилия.
ii) Рулевое управление
Рулевое управление, выполняемое в нормальных условиях посредством ECU 108 рулевого управления, в частности, посредством компьютера 114S ECU 108 рулевого управления, выполняется, в основном, так, что рулевой актуатор 72, т.е., мотор 68 рулевого управления, управляется так, что величина θ руления колес 12 становится равной величине в соответствии с величиной δ задействования рулевого колеса 60. Такое управление является основным рулевым управлением. Величина θ руления вычисляется посредством накопления угла RS поворота мотора, обнаруженного посредством датчика 96 угла поворота мотора, предусмотренного для мотора 68 рулевого управления. Таким образом, ECU 108 рулевого управления захватывает величину θ руления в настоящий момент времени посредством вычисления на основе угла RS поворота мотора. Дополнительно, ECU 108 рулевого управления определяет, согласно следующему выражению, целевую величину θ*руления в качестве цели для величины θ руления на основе величины δ задействования рулевого колеса 60, переданного в качестве информации задействования от ECU 110 реактивного усилия:
θ*=αS×δ
при этом αS представляет основной коэффициент усиления рулевого управления.
ECU 108 рулевого управления получает отклонение Δθ величины руления, которое является отклонением фактической величины θ руления от целевой величины руления и выполняет управление с обратной связью для мотора 68 рулевого управления на основе отклонения Δθ величины руления. В частности, ток IS питания для мотора 68 рулевого управления определяется согласно следующему выражению, и определенный ток подается от инвертора 116S к мотору 68 рулевого управления:
IS=βSP×Δθ+βSD×dΔθ
при этом βSP представляет пропорциональный коэффициент усиления, βSD представляет дифференциальный коэффициент усиления, а dΔθ представляет значение производной для отклонения величины руления.
Аналогично величине δ задействования, величина θ руления, захваченная посредством ECU 108 рулевого управления в момент времени, когда транспортное средство 10 начинает работать, калибруется на основе величины θ руления, обнаруженной посредством датчика 98 величины руления.
В рулевом управлении, выполняемом в настоящей системе 14 рулевого управления транспортного средства, ECU 108 рулевого управления выполняет, в дополнение к основному рулевому управлению, управление изменением передаточного числа рулевого управления на основе скорости v движения транспортного средства 10. Настоящая система 14 рулевого управления транспортного средства имеет то, что называется функцией системы с переменным передаточным числом (VGRS). В управлении изменением передаточного числа рулевого управления отношение изменения в величине θ руления относительно изменения в величине δ задействования, а именно, передаточное число рулевого управления, становится меньше с увеличением скорости v транспортного средства, принимая во внимание устойчивость движения транспортного средства. Напротив, передаточное число рулевого управления становится больше с уменьшением скорости v транспортного средства для улучшения эксплуатационных качеств или маневренности транспортного средства. Аналогично ECU 110 реактивного усилия, ECU 108 рулевого управления выполняет управление изменением передаточного числа рулевого управления на основе информации о скорости транспортного средства относительно скоростей vHB, vBR транспортного средства, переданной от гибридного ECU 40 и ECU 52 тормоза через первую–третью шины 120a–120c связи. ECU 108 рулевого управления выполняет управление изменением передаточного числа рулевого управления в дополнение к основному рулевому управлению, описанному выше, с тем, чтобы определять целевую величину θ*руления согласно следующему выражению:
θ*= γS(v)×αS×δ
при этом γS(v) представляет коэффициент на основе скорости v движения транспортного средства в качестве параметра.
E. Меры для того, чтобы справляться с электрическим отказом в системе рулевого управления варианта осуществления
Система 14 рулевого управления транспортного средства является тем, что называется системой рулевого управления по проводам, в которой колеса 12 управляются посредством электрического управления рулевым актуатором 72 независимо от усилия задействования, прикладываемого к рулевому колесу 60 водителем. Настоящая система 14 рулевого управления транспортного средства не оборудуется средством для рулевого управления колесами 12 посредством усилия задействования водителя в случае, когда электрический отказ происходит в системе 14 рулевого управления транспортного средства. С точки зрения отказоустойчивости, следовательно, является значительно важным справляться с электрическим отказом, в частности, отказом ECU 110 реактивного усилия и ECU 108 рулевого управления системы 14 рулевого управления транспортного средства. Далее в данном документе будут объяснены меры, предусматриваемые для того, чтобы система 14 рулевого управления транспортного средства справлялась с отказом ECU 110 реактивного усилия и ECU 108 рулевого управления.
i) Три избыточные системы
В случае, когда электрический отказ происходит в каком–либо из ECU 110 реактивного усилия и множества ECU 108 рулевого управления системы 14 рулевого управления транспортного средства, система 14 рулевого управления транспортного средства должна проявлять, по меньшей мере, функцию изменения направления транспортного средства 10 до некоторой степени в соответствии с величиной δ задействования рулевого колеса 60. Как объяснено выше, система 14 рулевого управления транспортного средства включает в себя, каждую в качестве системы для получения величины δ задействования в качестве информации задействования, две системы, которые соответствуют двухсистемному устройству 62 применения реактивного усилия, и каждая из которых включает в себя один ECU 110 реактивного усилия и один датчик 104 угла поворота мотора. Система для получения величины δ задействования в качестве информации задействования будет далее в данном документе называться "системой получения информации задействования" по необходимости. Дополнительно, система 14 рулевого управления транспортного средства включает в себя, в качестве системы для изменения направления транспортного средства 10, две системы для изменения направления транспортного средства 10 посредством рулевого управления колесами 12, каждая из которых включает в себя один ECU 108 рулевого управления и один мотор 68 рулевого управления. Система для изменения направления транспортного средства 10 будет далее в данном документе называться "системой рулевого управления колесами" по необходимости. Один из двух ECU 110 реактивного усилия и один из двух ECU 108 рулевого управления соединяются посредством одной выделенной линии 124 связи, в то время как второй из двух ECU 110 реактивного усилия и второй из двух ECU 108 рулевого управления соединяются посредством другой выделенной линии 124 связи. В этой конфигурации, даже когда какой–либо один из двух ECU 110 реактивного усилия и двух ECU 108 рулевого управления подвержен отказу, а именно, даже в случае основного отказа, обеспечивается функционирование, по меньшей мере, одной системы получения информации задействования и функционирование, по меньшей мере, одной системы рулевого управления колесами, т.е., обеспечивается функционирование одной из двух систем настоящей системы 14 рулевого управления транспортного средства.
Хотя очень маловероятно, что какие–либо два из ECU 110 реактивного усилия и ECU 108 рулевого управления отказываются работать в одно и то же время, здесь рассматривается случай, в котором происходит такой вторичный отказ. С точки зрения отказоустойчивости, желательно справляться со вторичным отказом.
Соответственно, когда каждая из двух систем получения информации задействования, описанных выше, определяется как основная система получения информации задействования, система 14 рулевого управления транспортного средства, в дополнение к основным системам получения информации задействования, вспомогательную систему получения информации задействования, которая является альтернативной системой получения информации задействования, а именно, устройством получения информации задействования, которое включает в себя датчик 106 величины задействования и ECU 112 величины задействования.
Дополнительно, когда каждая из двух систем рулевого управления колесами определяется в качестве основной системы рулевого управления колесами, тормозная система 18, которая имеет функцию изменения направления транспортного средства 10 посредством приложения тормозящих усилий к правому и левому колесам 12 независимо друг от друга, функционирует в качестве вспомогательной системы рулевого управления колесами, которая является экстренной системой рулевого управления. В рулевом управлении колесами 12 посредством тормозной системы 18, колеса 12 фактически не управляются, но транспортное средство ведет себя, как если бы колеса 12 управлялись. В этом смысле, тормозная система 18 называется "вспомогательной системой рулевого управления колесами" ради удобства. Т.е., тормозная система 18 конструируется как часть системы 14 рулевого управления транспортного средства. Другими словами, тормозная система 18, управляемая посредством ECU 52 тормоза, функционирует как вспомогательное устройство рулевого управления в системе 14 рулевого управления транспортного средства. Тормозная система 18 в качестве вспомогательной системы рулевого управления колесами работает, только когда две основные системы рулевого управления колесами отказали. В частности, ECU 52 тормоза управляет тормозным актуатором 48 на основе информации о полученной величине δ задействования рулевого колеса 60, так что различие между тормозными усилиями, которые должны быть приложены к правому и левому колесам 12, соответствует величине δ задействования. Транспортное средство может поворачивать вправо посредством увеличения тормозного усилия к колесам 12 правой стороны, так, чтобы быть больше тормозного усилия для колес 12 левой стороны. Транспортное средство может поворачивать влево посредством увеличения тормозного усилия к колесам 12 левой стороны, так, чтобы быть больше тормозного усилия для колес 12 правой стороны.
В настоящей системе 14 рулевого управления транспортного средства ECU 112 величины задействования, который составляет устройство получения информации задействования, может передавать, в качестве информации задействования, информацию о величине δ задействования, полученную им самим. ECU 112 величины задействования, оба ECU 108 рулевого управления и ECU 52 тормоза соединяются с первой шиной 120a связи, так что информация, передаваемая посредством ECU 112 величины задействования, может быть принята, через первую шину 120a связи, каждым из двух ECU 108 рулевого управления и ECU 52 тормоза в качестве вспомогательного устройства рулевого управления.
Согласно конфигурации, описанной выше, система 14 рулевого управления транспортного средства состоит из трех систем получения информации задействования и трех систем рулевого управления колесами. Даже в случае вторичного отказа, в котором два из ECU 110 реактивного усилия и ECU 108 рулевого управления отказываются работать, какая–либо из систем рулевого управления колесами может изменять направление транспортного средства на основе величины δ задействования рулевого колеса 60, полученной посредством какой–либо из трех систем получения информации задействования. Т.е., системы получения информации задействования и системы рулевого управления колесами в системе 14 рулевого управления транспортным средством, и те, и другие являются тремя избыточными системами.
Как объяснено выше, управление реактивным усилием, выполняемое каждым из ECU 110 реактивного усилия в нормальных условиях, включает в себя, в дополнение к основному управлению реактивным усилием, зависящее от нагрузки рулевого управления управление реактивным усилием и зависящее от скорости транспортного средства управление реактивным усилием. Рулевое управление, выполняемое каждым ECU 108 рулевого управления в нормальных условиях, включает в себя, в дополнение к основному рулевому управлению, управление изменением передаточного числа рулевого управления. В системе 14 рулевого управления транспортного средства, даже если один из ECU 108 рулевого управления находится в состоянии отказа, зависящее от нагрузки рулевого управления управление реактивным усилием может выполняться посредством каждого ECU 110 реактивного усилия, насколько возможно. Дополнительно, даже если гибридный ECU 40 или ECU 52 тормоза, каждый из которых сконфигурирован, чтобы передавать информацию о скорости транспортного средства, не функционирует, или путь связи для передачи информации о скорости транспортного средства отказывается функционировать, зависящее от скорости транспортного средства управление реактивным усилием может выполняться посредством каждого из ECU 110 реактивного усилия, насколько возможно, и управление изменением передаточного числа рулевого управления может выполняться посредством каждого ECU 108 рулевого управления, насколько возможно. В виду этого, как показано на фиг. 3, два ECU 110 реактивного усилия, два ECU 108 рулевого управления, ECU 112 величины задействования, ECU 52 тормоза и гибридный ECU 40 соединяются друг с другом посредством первой шины 120a связи, второй шины 120b связи и третьей шины 120c связи. Три шины 120a–120c связи будут совокупно или индивидуально называться "шиной 120 связи" по необходимости.
Функции соответствующих трех шин 120a–120c связи будут кратко объяснены. Первая шина 120a связи рассматривается в качестве шины связи, по которой величина δ задействования рулевого колеса 60, полученная посредством ECU 112 величины задействования, который составляет устройство получения информации задействования, передается двум ECU 108 рулевого управления и ECU 52 тормоза в качестве трех систем рулевого управления колесами. Вторая шина 120b связи рассматривается в качестве шины связи, по которой информация о скорости v транспортного средства от гибридного ECU 40 и ECU 52 тормоза передается к двум ECU 110 реактивного усилия. Третья шина 120c связи рассматривается в качестве шины связи, по которой информация о скорости v транспортного средства от гибридного ECU 40 и ECU 52 тормоза передается к двум ECU 108 рулевого управления. Дополнительно, третья шина 120c связи предоставляет возможность связи между: ECU 110 реактивного усилия одной из A–системы и B–системы; и ECU 108 рулевого управления второй из A–системы и B–системы и связи между: ECU 110 реактивного усилия второй из A–системы и B–системы; и ECU 108 рулевого управления первой из A–системы и B–системы.
ii) Меры, чтобы справляться с отказом электронного блока управления, который подразумевает явление неупорядоченной передачи
В случае, когда каждый из ECU 108 рулевого управления, ECU 110 реактивного усилия, ECU 112 величины задействования, гибридного ECU 40 и ECU52 тормоза (далее в данном документе просто называемых "ECU" по необходимости) передает информацию (далее в данном документе называемую "контентной информацией" по необходимости) по шинам 120 связи каждый ECU присоединяет, к информации, идентификационную информацию, такую как адрес, ID или т.п. для идентификации ECU и отправляет, в шины 120 связи, информацию содержимого, к которой присоединена идентификационная информация. Каждый ECU принимает информацию содержимого, требуемую им самим, среди частей информации, которая протекает по шинам связи, на основе идентификационной информации. В случае, когда некоторый ECU находится в состоянии отказа, т.е., компьютер 114S, 114C, 114δ для ECU находится в состоянии отказа, существует вероятность, что ECU, подверженный отказу, выдает массивные объемы бессмысленной информации в шины 120 связи без присоединения идентификационной информации. Другими словами, существует вероятность возникновения отказа, который подразумевает явление неупорядоченной передачи.
В случае, когда некоторый ECU подвержен отказу, который подразумевает явление неупорядоченной передачи, шина/шины 120 связи, с которыми ECU соединяется, становятся заполненными массивными объемами выданной информации, так что ожидается, что рассматриваемые шина/шины 120 связи отказываются функционировать, в итоге делая невозможной связь по шине/шинам 120 связи.
Соответственно, каждый из ECU 108 рулевого управления и ECU 110 реактивного усилия системы 14 рулевого управления транспортного средства конфигурируется так, что каждый ECU принимает информацию через один из трех портов из шины 120 связи, которая соединяется с одним портом, но каждый ECU запрещает выходной поток информации через один порт в шину 120 связи. Т.е., ECU выполняет, через один порт, одностороннюю связь, в которой только прием информации разрешается. В каждом из ECU 108 рулевого управления и ECU 110 реактивного усилия односторонняя связь выполняется через один из трех I/O 118S, 118C компьютера 114S, 114C. На фиг. 3 один из трех I/O 118S, 118C, через который выполняется односторонняя связь, помечается символом "×", и линия связи, по которой односторонняя связь между шиной 120 связи и одним портом выполняется, указывается штриховой линией.
В частности, ECU 110A реактивного усилия принимает информацию из второй шины 120b связи, но не имеет возможности предоставлять информацию во вторую шину 120b связи. ECU 110B реактивного усилия принимает информацию из третьей шины 120c связи, но не имеет возможности предоставлять информацию в третью шину 120c связи. ECU 108A рулевого управления принимает информацию из третьей шины 120c связи, но не имеет возможности предоставлять информацию в третью шину 120c связи. ECU 108B рулевого управления принимает информацию из первой шины 120a связи, но не имеет возможности предоставлять информацию в первую шину 120a связи. Согласно этой конфигурации, даже когда отказ, который подразумевает явление неупорядоченной передачи, происходит в ECU 110A реактивного усилия, связь через вторую шину 120b связи не блокируется. Даже когда отказ происходит в ECU 110B реактивного усилия, связь по третьей шине 120c связи не блокируется. Даже когда отказ происходит в ECU 108A рулевого управления, связь по третьей шине 120c связи не блокируется. Даже когда отказ происходит в ECU 108B рулевого управления, связь по первой шине 120a связи не блокируется.
Как объяснено выше, все из четырех ECU, т.е., два ECU 110 реактивного усилия и два ECU 108 рулевого управления, включают в себя три порта связи, и односторонняя связь конфигурируется для выполнения через один из трех портов. Другими словами, конфигурация относительно портов связи является общей для обоих ECU 110 реактивного усилия и обоих ECU 108 рулевого управления, способствуя упрощению структуры системы 14 рулевого управления транспортного средства.
iii) Функционирование системы рулевого управления в случае возникновения электрического отказа
Далее в данном документе будет объяснено то, как обеспечивается связь между неотказавшими ECU, и как система 14 рулевого управления транспортного средства работает в случае, когда один или два ECU подвержены электрическому отказу. В последующем объяснении гибридный ECU 40, не принадлежащий ни одной из трех систем получения информации задействования и трех систем рулевого управления колесами, не объясняется.
Обращаясь сначала к фиг. 4B–4G, будут описаны случаи, в которых один ECU подвержен отказу, подразумевающего явление неупорядоченной передачи. В случаях, иллюстрированных на фиг. 4B–4G, взаимно различающиеся ECU находятся в состоянии отказа. На фиг. 4A–4G иллюстрация внутренней структуры каждого ECU опускается. Ради справки, фиг. 4A иллюстрирует состояние, в котором ни один из ECU не находится в состоянии отказа. На фиг. 4B–4G один ECU, который находится в состоянии отказа, помечается символом "×", и шина/шины 120 связи и выделенная линия/линии 124 связи, которые не функционируют, стираются, т.е., не иллюстрируются.
Фиг. 4B иллюстрирует состояние, в котором ECU 110A реактивного усилия находится в состоянии отказа. В этом состоянии выделенная линия 124A связи и третья шина 120c связи не функционируют. ECU 108A рулевого управления выполняет основное рулевое управление на основе информации задействования, принятой от ECU 112 величины задействования через первую шину 120a связи. ECU 108A рулевого управления и ECU 108B рулевого управления выполняют управление изменением передаточного числа рулевого управления на основе информации о скорости транспортного средства, принятой от ECU 52 тормоза через первую шину 120a связи. ECU 110B реактивного усилия выполняет зависящее от скорости транспортного средства управление реактивным усилием на основе информации о скорости транспортного средства, принятой от ECU 52 тормоза через шину 120b связи. В системе 14 рулевого управления транспортного средства информация задействования является информацией относительно величины δ задействования, а величина о скорости транспортного средства является информацией относительно скорости v движения транспортного средства 10. Это применяется к следующему объяснению.
Фиг. 4C иллюстрирует состояние, в котором ECU 110B реактивного усилия находится в состоянии отказа. В этом состоянии выделенная линия 124B связи и вторая шина 120b связи не функционируют. ECU 108B рулевого управления выполняет основное рулевое управление на основе информации задействования, принятой от ECU 112 величины задействования через первую шину 120a связи. ECU 108A рулевого управления и ECU 108B рулевого управления выполняют управление изменением передаточного числа рулевого управления на основе информации о скорости транспортного средства, принятой от ECU 52 тормоза через первую шину 120a связи или третью шину 120c связи. ECU 110A реактивного усилия выполняет зависящее от скорости транспортного средства управление реактивным усилием на основе информации о скорости транспортного средства, принятой от ECU 52 тормоза через третью шину 120c связи.
Фиг. 4D иллюстрирует состояние, в котором ECU 112 величины задействования находится в состоянии отказа. В этом состоянии первая шина 120a связи не функционирует. Однако, отказ возникает во вспомогательной системе получения информации задействования, и выделенная линия 124A связи, выделенная линия 124B связи, вторая шина 120b связи и третья шина 120c связи функционируют, так что управление реактивным усилием, выполняемое посредством обоих ECU 110 реактивного усилия, и рулевое выполнение, выполняемое посредством обоих ECU 108 рулевого управления, не подвергаются воздействию.
Фиг. 4E иллюстрирует состояние, в котором ECU 108A рулевого управления находится в состоянии отказа. В этом состоянии выделенная линия 124A связи и первая шина 120a связи не функционируют. ECU 108B рулевого управления выполняет управление изменением передаточного числа рулевого управления на основе информации о скорости транспортного средства, принятой от ECU 52 тормоза через третью шину 120c связи. ECU 110A реактивного усилия и ECU 110B реактивного усилия выполняют зависящее от скорости транспортного средства управление реактивным усилием на основе информации о скорости транспортного средства, принятой от ECU 52 тормоза через вторую шину 120b связи или третью шину 120c связи. ECU 110A реактивного усилия выполняет зависящее от нагрузки рулевого управления управление реактивным усилием на основе информации о рулевом управлении, принятой от ECU 108B рулевого управления через третью шину 120c связи. В настоящей системе рулевого управления информация о рулевом управлении является информацией об отклонении Δθ величины руления. Это применяется к следующему объяснению.
Фиг. 4F иллюстрирует состояние, в котором ECU 108B рулевого управления находится в состоянии отказа. В этом состоянии выделенная линия 124B связи и третья шина 120c связи не функционируют. ECU 108A рулевого управления выполняет управление изменением передаточного числа рулевого управления на основе информации о скорости транспортного средства, принятой от ECU 52 тормоза через первую шину 120a связи. ECU 110A реактивного усилия и ECU 110B реактивного усилия выполняют зависящее от скорости транспортного средства управление реактивным усилием на основе информации о скорости транспортного средства, принятой от ECU 52 тормоза через вторую шину 120b связи. Не существует путей передачи информации для того, чтобы ECU 110B реактивного усилия принял информацию о рулевом управлении от ECU 108A рулевого управления. Соответственно, ECU 110B усилия рулевого управления не выполняет зависящее от нагрузки рулевого управления управление реактивным усилием.
Фиг. 4G иллюстрирует состояние, в котором ECU 52 тормоза находится в состоянии отказа. В этом состоянии две выделенные линии 124A, 124B связи функционируют, тогда как ни одна из трех шин 120a, 120b, 120c связи не функционирует. ECU 110A реактивного усилия и ECU 110B реактивного усилия выполняют основное управление реактивным усилием и зависящее от нагрузки рулевого управления управление реактивным усилием, но не выполняют зависящее от скорости транспортного средства управление реактивным усилием. ECU 108A рулевого управления и ECU 108B рулевого управления выполняют основное рулевое управление, но не выполняют управление изменением передаточного числа рулевого управления.
Обращаясь далее к фиг. 5B–5H и фиг. 6I–6P, будут объяснены случаи, в которых два ECU подвержены отказу, подразумевающего явление неупорядоченной передачи. В случаях, иллюстрированных на фиг. 5B–5H и фиг. 6I–6P, ECU взаимно различающихся сочетаний находятся в состоянии отказа. Как на фиг. 4A–4G, иллюстрация внутренней структуры каждого ECU опускается на фиг. 5A–5H и фиг. 6I–6P. Ради справки, фиг. 5A иллюстрирует состояние, в котором ни один из ECU не находится в состоянии отказа. На фиг. 5B–5H и фиг. 6I–6P два ECU, которые находятся в состоянии отказа, помечаются символом "×", и шина/шины 120 связи и выделенные линия/линии 124 связи, которые не функционируют, стираются, т.е., не иллюстрируются.
Фиг. 5B иллюстрирует состояние, в котором ECU 110A реактивного усилия и ECU 108A рулевого управления A–системы находятся в состоянии отказа. В этом состоянии выделенная линия 124A связи, первая шина 120a связи и третья шина 120c связи не функционируют. B–система функционирует, и ECU 108B рулевого управления не выполняет управление изменением передаточного числа рулевого управления, тогда как ECU 110B реактивного усилия выполняет зависящее от скорости транспортного средства управление реактивным усилием на основе информации о скорости транспортного средства, принятой от ECU 52 тормоза через вторую шину 120b связи.
Фиг. 5C иллюстрирует состояние, в котором ECU 110B реактивного усилия и ECU 108B рулевого управления B–системы находятся в состоянии отказа. В этом состоянии выделенная линия 124B связи, вторая шина 120b связи и третья шина 120c связи не функционируют. A–система функционирует, и ECU 110A реактивного усилия не выполняет зависящее от скорости транспортного средства управление реактивным усилием, тогда как ECU 108A рулевого управления выполняет управление изменением передаточного числа рулевого управления на основе информации о скорости транспортного средства, принятой от ECU 52 тормоза через первую шину 120a связи.
Фиг. 5D иллюстрирует состояние, в котором ECU 112 величины задействования, который составляет вспомогательную систему получения информации задействования, и ECU 52 тормоза, который составляет вспомогательную систему рулевого управления колесами, находятся в состоянии отказа. В этом состоянии, ни одна из первой шины 120a связи, второй шины 120b связи и третьей шины 120c связи не функционирует. Хотя A–система и B–система функционируют, не существует путей передачи информации для того, чтобы A–система и B–система принимали информацию о скорости транспортного средства. Соответственно, ECU 110A реактивного усилия и ECU 110B реактивного усилия не выполняют зависящее от скорости транспортного средства управление реактивным усилием, и ECU 108A рулевого управления и ECU 108B рулевого управления не выполняют управление изменением передаточного числа рулевого управления.
Фиг. 5E иллюстрирует состояние, в котором ECU 110A реактивного усилия и ECU 110B реактивного усилия в качестве двух главных систем получения информации задействования, оба находятся в состоянии отказа. В этом состоянии и выделенная линия 124A связи, и выделенная линия 124B связи, вторая шина 120b связи и третья шина 120c связи не функционируют. Каждый из ECU 108A рулевого управления и ECU 108B рулевого управления выполняет: основное рулевое управление на основе информации задействования, принятой от ECU 112 величины задействования в качестве вспомогательной системы получения информации задействования через первую шину 120a связи; и управление изменением передаточного числа рулевого управления на основе информации о скорости транспортного средства, принятой от ECU 52 тормоза через первую шину 120a связи.
Фиг. 5F иллюстрирует состояние, в котором ECU 108A рулевого управления и ECU 108B рулевого управления в качестве двух главных систем рулевого управления колесами, оба находятся в состоянии отказа. В этом состоянии выделенная линия 124A связи, также как и выделенная линия 124B связи, и первая шина 120a связи и третья шина 120c связи не функционируют. В этом состоянии ECU 52 тормоза принимает информацию задействования от ECU 110B реактивного усилия через вторую шину 120b связи, и тормозная система 18 работает в качестве вспомогательной системы рулевого управления колесами. ECU 110A реактивного усилия и ECU 110B реактивного усилия могут выполнять зависящее от скорости транспортного средства управление реактивным усилием на основе информации о скорости транспортного средства, принятой от ECU 52 тормоза через вторую шину 120b связи.
Фиг. 5G иллюстрирует состояние, в котором ECU 110A реактивного усилия A–системы и ECU 108B рулевого управления B–системы находятся в состоянии отказа. В этом состоянии и выделенная линия 124A связи, и выделенная линия 124B связи, и третья шина 120c связи не функционируют. В этом состоянии ECU 108A рулевого управления выполняет: основное рулевое управление на основе информации задействования, принятой от ECU 112 величины задействования через первую шину 120a связи; и управление изменением передаточного числа рулевого управления на основе информации о скорости транспортного средства, принятой от ECU 52 тормоза через первую шину 120a связи. ECU 110B реактивного усилия выполняет зависящее от скорости транспортного средства управление реактивным усилием на основе информации о скорости транспортного средства, принятой от ECU 52 тормоза через шину 120b связи.
Фиг. 5H иллюстрирует состояние, в котором ECU 110B реактивного усилия B–системы и ECU 108A рулевого управления A–системы находятся в состоянии отказа. В этом состоянии и выделенная линия 124A связи, и выделенная линия 124B связи, первая шина 120a связи и вторая шина 120b связи не функционируют. В этом состоянии ECU 108B рулевого управления выполняет: основное рулевое управление на основе информации задействования, принятой от ECU 110A реактивного усилия через третью шину 120c связи; и управление изменением передаточного числа рулевого управления на основе информации о скорости транспортного средства, принятой от ECU 52 тормоза через третью шину 120c связи. ECU 110A реактивного усилия выполняет зависящее от скорости транспортного средства управление реактивным усилием на основе информации о скорости транспортного средства, принятой от ECU 52 тормоза через третью шину 120c связи.
Фиг. 6I иллюстрирует состояние, в котором ECU 110A реактивного усилия и ECU 112 величины задействования находятся в состоянии отказа. В этом состоянии выделенная линия 124A связи, первая шина 120a связи и третья шина 120c связи не функционируют. В то время как ECU 108A рулевого управления не может выполнять основное рулевое управление, B–система функционирует. ECU 108B рулевого управления не может выполнять управление изменением передаточного числа рулевого управления, но ECU 110B реактивного усилия выполняет зависящее от скорости транспортного средства управление реактивным усилием на основе информации о скорости транспортного средства, принятой от ECU 52 тормоза через вторую шину 120b связи.
Фиг. 6J иллюстрирует состояние, в котором ECU 110B реактивного усилия и ECU 112 величины задействования находятся в состоянии отказа. В этом состоянии выделенная линия 124B связи, первая шина 120a связи и вторая шина 120b связи не функционируют. ECU 108B рулевого управления выполняет основное рулевое управление на основе информации задействования, принятой от ECU 110A реактивного усилия через третью шину 120c связи. ECU 108A рулевого управления и ECU 108B рулевого управления выполняют управление изменением передаточного числа рулевого управления на основе информации о скорости транспортного средства, принятой от ECU 52 тормоза через третью шину 120c связи. ECU 110A реактивного усилия выполняет зависящее от скорости транспортного средства управление реактивным усилием на основе информации о скорости транспортного средства, принятой от ECU 52 тормоза через третью шину 120c связи.
Фиг. 6K иллюстрирует состояние, в котором ECU 108A рулевого управления и ECU 112 величины задействования находятся в состоянии отказа. В этом состоянии выделенная линия 124A связи и первая шина 120a связи не функционируют. B–система функционирует, и ECU 108B рулевого управления выполняет управление изменением передаточного числа рулевого управления на основе информации о скорости транспортного средства, принятой от ECU 52 тормоза через третью шину 120c связи. ECU 110A реактивного усилия и ECU 110B реактивного усилия выполняют зависящее от скорости транспортного средства управление реактивным усилием на основе информации о скорости транспортного средства, принятой от ECU 52 тормоза через вторую шину 120b связи или третью шину 120c связи.
Фиг. 6L иллюстрирует состояние, в котором ECU 108B рулевого управления и ECU 112 величины задействования находятся в состоянии отказа. В этом состоянии выделенная линия 124B связи, первая шина 120a связи и третья шина 120c связи не функционируют. Не существует путей передачи информации для того, чтобы ECU 108A рулевого управления принял информацию о скорости транспортного средства через ECU 52 тормоза. Соответственно, ECU 108A рулевого управления не выполняет управление изменением передаточного числа рулевого управления. С другой стороны, ECU 110A реактивного усилия и ECU 110B реактивного усилия выполняют зависящее от скорости транспортного средства управление реактивным усилием на основе информации о скорости транспортного средства, принятой от ECU 52 тормоза через вторую шину 120b связи.
Фиг. 6M иллюстрирует состояние, в котором ECU 110A реактивного усилия и ECU 52 тормоза находятся в состоянии отказа. В этом состоянии выделенная линия 124A связи и три шины связи, т.е., первая шина 120a связи, вторая шина 120b связи и третья шина 120c связи, не функционируют. ECU 108A рулевого управления не может выполнять основное рулевое управление, но B–система функционирует. Поскольку информация о скорости транспортного средства является недоступной, ECU 110B реактивного усилия не выполняет зависящее от скорости транспортного средства управление реактивным усилием, и ECU 108B рулевого управления не выполняет управление изменением передаточного числа рулевого управления.
Фиг. 6N иллюстрирует состояние, в котором ECU 110B реактивного усилия и ECU 52 тормоза находятся в состоянии отказа. В этом состоянии выделенная линия 124B связи и три шины связи, т.е., первая шина 120a связи, вторая шина 120b связи и третья шина 120c связи, не функционируют. ECU 108B рулевого управления не может выполнять основное рулевое управление, но A–система функционирует. Поскольку информация о скорости транспортного средства является недоступной, ECU 110A реактивного усилия не выполняет зависящее от скорости транспортного средства управление реактивным усилием, и ECU 108A рулевого управления не выполняет управление изменением передаточного числа рулевого управления.
Фиг. 6O иллюстрирует состояние, в котором ECU 108A рулевого управления и ECU 52 тормоза находятся в состоянии отказа. В этом состоянии выделенная линия 124A связи и три шины связи, т.е., первая шина 120a связи, вторая шина 120b связи и третья шина 120c связи, не функционируют. Поскольку информация о скорости транспортного средства является недоступной, ECU 110B реактивного усилия не выполняет зависящее от скорости транспортного средства управление реактивным усилием, и ECU 108B рулевого управления не выполняет управление изменением передаточного числа рулевого управления.
Фиг. 6P иллюстрирует состояние, в котором ECU 108B рулевого управления и ECU 52 тормоза находятся в состоянии отказа. В этом состоянии выделенная линия 124B связи и три шины связи, т.е., первая шина 120a связи, вторая шина 120b связи и третья шина 120c связи, не функционируют. Поскольку информация о скорости транспортного средства является недоступной, ECU 110A реактивного усилия не выполняет зависящее от скорости транспортного средства управление реактивным усилием, и ECU 108A рулевого управления не выполняет управление изменением передаточного числа рулевого управления.
Были объяснены все случаи, в которых один или два ECU среди трех ECU 110A, 110B, 112, каждый в качестве системы получения информации задействования, и трех ECU 108A, 108B, 52, каждый в качестве системы рулевого управления колесами, подвержены отказу, подразумевающего явление неупорядоченной передачи. Дополнительно, было объяснено, для всех случаев, как обеспечивается связь между неотказавшими ECU, и как работает система 14 рулевого управления транспортного средства. Как очевидно из вышеприведенного объяснения, в любом из случаев, работа, по меньшей мере, одной из трех систем управления колесами, включающих в себя вспомогательную систему управления колесами, предоставляет возможность изменения направления транспортного средства в соответствии с величиной δ задействования рулевого колеса 60. Таким образом, настоящая система 14 рулевого управления транспортного средства конструируется как система рулевого управления по проводам, отличная с точки зрения отказоустойчивости.
F. Модификации
В системе 14 рулевого управления транспортного средства иллюстрированного варианта осуществления, соединение между: ECU 110A, 110B реактивного усилия и ECU 108A, 108B рулевого управления; и первой–третьей шинами 120a–120c связи конфигурируется так, что связь через один из трех портов в каждом из ECU 110A, 110B реактивного усилия и ECU 108A, 108B рулевого управления является односторонней связью, объясненной выше, в виду отказа, который подразумевает явление неупорядоченной передачи. Число портов для односторонней связи может быть свободно определено во время проектирования. Дополнительно, может быть свободно определено во время проектирования, какой порт или порты множества ECU используются для односторонней связи.
Система 14 рулевого управления транспортного средства иллюстрированного варианта осуществления применяет, в дополнение к первой шине 120a связи, вторую шину 120b связи и третью шину 120c связи. Т.е., три шины связи всего предусматриваются в системе 14 рулевого управления транспортного средства. Число шин связи может быть изменено, т.е., может быть увеличено или уменьшено, в зависимости от того, какая функция системы рулевого управления должна проявляться в случае, когда какой–либо один или два ECU отказываются работать, а именно, в зависимости от того, до какой степени система рулевого управления должна проявлять функцию, которая достигается посредством дополнительных управлений, таких как зависящее от скорости транспортного средства управление реактивным усилием, зависящее от нагрузки рулевого управления управление реактивным усилием и управление изменением передаточного числа рулевого управления, или в зависимости от того, до какой степени необходимо справляться с явлением неупорядоченной передачи.
Например, система рулевого управления транспортного средства может быть сконфигурирована, как иллюстрировано на фиг. 7. Система 14' рулевого управления транспортного средства, иллюстрированная на фиг. 7, включает в себя только одну шину 120' связи. В этой конфигурации ECU 112 величины задействования, ECU 108A рулевого управления, ECU 108B рулевого управления и ECU 52 тормоза могут быть соединены с шиной 120' связи. В случае, когда какие–либо два ECU системы 14' рулевого управления транспортного средства, имеющей такую упрощенную структуру, подвержены отказу, не подразумевающего явление неупорядоченной передачи, направление транспортного средства 10 может быть изменено в соответствии с величиной δ задействования рулевого колеса 60. Когда явление неупорядоченной передачи принимается во внимание, система рулевого управления транспортного средства может быть сконфигурирована, аналогично системе 14' рулевого управления транспортного средства, так что связь между: ECU 108A рулевого управления, ECU 108B рулевого управления и ECU 52 тормоза и шиной 120' связи является односторонней связью, в которой не предоставляется возможность протекания информации от множества ECU в шину 120' связи, в то время как информация является доступной из шины 120' связи.
Реферат
Изобретение относится к системе рулевого управления по проводам. Система включает в себя: двухсистемное устройство 62 применения реактивного усилия, включающее в себя два контроллера 110A, 110B реактивного усилия и сконфигурированное, чтобы получать информацию задействования и применять рабочее реактивное усилие; двухсистемное устройство 64 рулевого управления, включающее в себя два контроллера 108A, 108B рулевого управления и сконфигурированное, чтобы рулить колесом 12; устройство 106, 112 получения информации задействования; вспомогательное устройство 52 рулевого управления, приспособленное для изменения направления транспортного средства; две выделенные линии 124A, 124B связи, одна из которых с возможностью передачи информации и возможностью приема информации соединяет один из двух контроллеров 110A, 110B реактивного усилия и один из двух контроллеров 108A, 108B рулевого управления друг с другом, и другая из которых с возможностью передачи информации и возможностью приема информации соединяет другой из двух контроллеров 110A, 110B реактивного усилия и другой из двух контроллеров 108A, 108B рулевого управления друг с другом; и первую шину 120a связи, с которой устройство 106, 112 получения информации задействования, по меньшей мере, с возможностью передачи информации соединяется и с которой два контроллера 108A, 108B рулевого управления и вспомогательное устройство 52 рулевого управления, по меньшей мере, с возможностью приема информации соединяются. Обеспечивается повышение надежности. 14 з.п. ф-лы, 7 ил.
Формула
Документы, цитированные в отчёте о поиске
Устройство управления движением транспортного средства и способ управления движением транспортного средства
Комментарии