Устройство управления движением транспортного средства и способ управления движением транспортного средства - RU2587317C1
Код документа: RU2587317C1
Чертежи




Описание
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройствам и способам управления движением транспортного средства для того, чтобы управлять движением транспортного средства.
Уровень техники
[0002] Патентный документ 1 описывает технологию руления по проводам, включающую в себя резервную муфту. Руление по проводам управляет углом поворота колеса в соответствии с углом поворота руля при рулении в состоянии расцепленной муфты и зацепляет муфту, когда зажигание выключается.
Список библиографических ссылок
Патентные документы
[0003] PTL 1. JP 2011-5933 A
Сущность изобретения
Техническая задача
[0004] Когда зажигание выключается, и если действие руления выполняется перед фактическим зацеплением муфты, взаимосвязь между углом поворота при рулении и угла поворота изменяется, и в силу этого может возникать смещение позиции (смещение нейтральной позиции). В этом случае, после включения зажигания снова, далее взаимосвязь между углом поворота при рулении и углом поворота должна корректироваться. Тем не менее, хотя водитель пытается управлять транспортным средством по прямой вперед, например, угол поворота при рулении может превышать 0 до коррекции взаимосвязи между углом поворота при рулении и углом поворота. Это может приводить к некорректному выполнению управления тормозной силой таким образом, чтобы заставлять поведение при повороте транспортного средства совпадать с целевым поведением при повороте.
Настоящее изобретение направлено на подавление некорректного выполнения управления тормозной силой, возникающего в результате смещения позиции.
Решение задачи
[0005] Устройство управления рулением согласно одному варианту осуществления настоящего изобретения обнаруживает поведение при повороте транспортного средства, задает целевое поведение при повороте транспортного средства, и когда отклонение между поведением при повороте и целевым поведением при повороте превышает предварительно определенное пороговое значение, активирует управление тормозной силой, чтобы управлять движением в соответствии с отклонением. Между рулевым механизмом, выполненным с возможностью осуществления руления водителем, и поворотным механизмом, выполненным с возможностью поворачивать колесо, вставляется муфта, выполненная с возможностью соединять рулевой механизм и поворотный механизм с возможностью отсоединения.
Предусмотрен поворотный актуатор, выполненный с возможностью приложения вращающей силы к поворотному механизму, и целевой угол поворота колеса задается в соответствии с рулением водителем в состоянии отсоединенной муфты, и поворотный актуатор приводится в действие и управляется в соответствии с целевым углом поворота. Затем угол поворота колеса обнаруживается, и когда возникает смещение позиции таким образом, что целевой угол поворота и угол поворота отличаются, пороговое значение для того, чтобы активировать управление тормозной силой, задается большим.
Преимущества изобретения
[0006] Согласно настоящему изобретению, если возникает смещение позиции, т.е. в состоянии, в котором поведение при повороте транспортного средства и целевое поведение при повороте не может сравниваться надлежащим образом, пороговое значение для того, чтобы активировать управление тормозной силой, задается большим, что означает то, что управление тормозной силой подавляется. Это позволяет подавлять некорректное выполнение управления тормозной силой, возникающее в результате смещения позиции.
Краткое описание чертежей
[0007] Фиг. 1 схематично описывает конфигурацию устройства рулевого управления.
Фиг. 2 является блок-схемой последовательности операций способа, иллюстрирующей обработку для того, чтобы обнаруживать смещение нейтральной позиции.
Фиг. 3 является блок-схемой последовательности операций способа, иллюстрирующей обработку для того, чтобы корректировать смещение нейтральной позиции.
Фиг. 4 описывает конфигурацию системы управления устойчивостью.
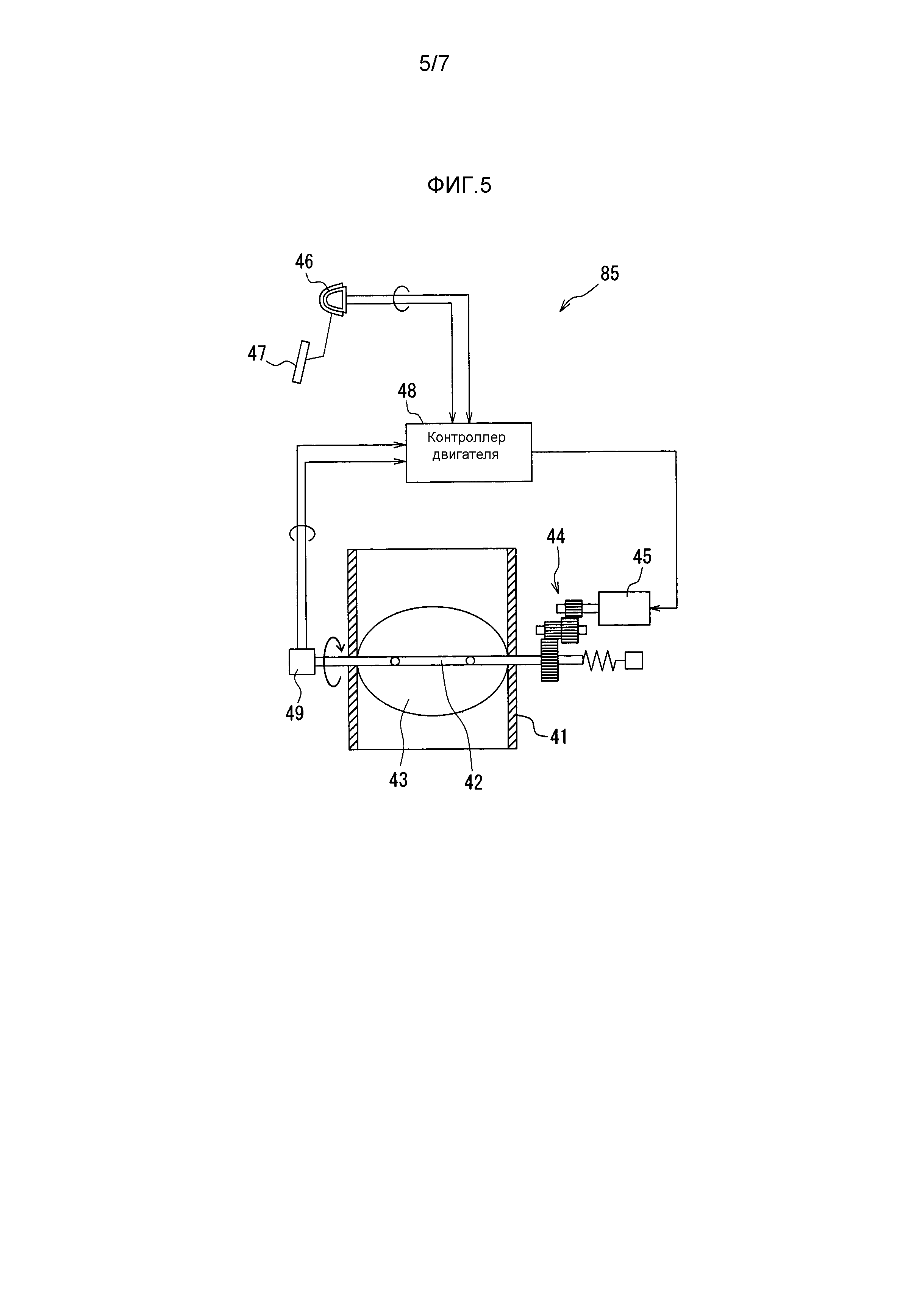
Фиг. 5 описывает конфигурацию системы дросселя с электронным управлением.
Фиг. 6 схематично описывает конфигурацию тормозного актуатора.
Фиг. 7 является блок-схемой последовательности операций способа, иллюстрирующей обработку управления устойчивостью.
Подробное описание вариантов осуществления
[0008] Далее описываются варианты осуществления настоящего изобретения со ссылкой на чертежи.
Первый вариант осуществления
Конфигурация
Во-первых, далее описывается конфигурация руления по проводам.
Фиг. 1 схематично описывает конфигурацию устройства рулевого управления.
Руль 11 соединен с рулевым валом 12, и колесо 13L или 13R (поворотное колесо) соединено с валом 18 первой шестерни через рулевой рычаг 14, поперечную рулевую тягу 15, вал 16 зубчатой рейки и ведущую шестерню 17 в этом порядке. Рулевой вал 12 и вал 18 первой шестерни соединяются с возможностью переключения между соединением и отсоединением через муфту 19.
В данном документе, руль 11 и рулевой вал 12, расположенные на входной стороне муфты 19, составляют входной рулевой механизм StIN для того, чтобы вращать рулевой вал 12 в соответствии с действием руления водителем. Рулевые рычаги 14, поперечные рулевые тяги 15, вал 16 зубчатой рейки, ведущая шестерня 17 и вал 18 первой шестерни, расположенные на выходной стороне муфты 19, составляют выходной поворотный механизм StOUT для того, чтобы поворачивать колеса 13L и 13R в соответствии с вращением вала 18 первой шестерни.
[0009] Иными словами, когда муфта 19 соединяется (зацепляется), и когда руль 11 вращается, в таком случае рулевой вал 12, муфта 19 и вал 18 первой шестерни вращаются. Вращательное перемещение вала 18 первой шестерни преобразуется в перемещение вперед/назад поперечных рулевых тяг 15 посредством вала 16 зубчатой рейки и ведущей шестерни 17, за счет этого поворачивая колеса 13L и 13R через рулевые рычаги 14.
Муфта 19 включает в себя электромагнитную муфту с зацеплением при отключении питания. Иными словами, когда отключается подача питания в электромагнитную муфту, кулачковый роликовый механизм, например, обеспечивает возможность ролику вводиться в зацепление с рабочей поверхностью кулачка входного вала и внешним кольцом выходного вала для зацепления между входным валом и выходного вала. С другой стороны, когда подается питание в электромагнитную муфту, прекращается ввод в зацепление ролика между рабочей поверхностью кулачка входного вала и внешним кольцом выходного вала вследствие втягивания посредством якоря для расцепления входного вала и выходного вала.
[0010] Вал 16 зубчатой рейки идет в горизонтальном направлении транспортного средства (в направлении ширины транспортного средства), на одной стороне которого (в этом случае на правой стороне транспортного средства) формируется шестерня 31 зубчатой рейки (зубья), причем ведущая шестерня 17 находится в зацеплении с этой шестерней 31 зубчатой рейки. Состояние зацепления между шестерней 31 зубчатой рейки и ведущей шестерней 17 регулируется посредством удерживающего механизма.
Вал 18 первой шестерни включает в себя, например, входной вал на стороне муфты и выходной вал на стороне ведущей шестерни, причем выходной вал соединен с первым поворотным электромотором M1 через червячную шестерню 32. Первый поворотный электромотор M1 содержит круговой датчик 33 позиции, например, для того чтобы обнаруживать угол вращения электромотора.
[0011] Червячная шестерня 32 включает в себя червячное колесо, соединенное с валом 18 первой шестерни, и червяк, соединенный с первым поворотным электромотором M1, причем червячный вал под углом пересекает вал червячного колеса. Это служит для того, чтобы уменьшать модуль в направлении, перпендикулярном валу для вала 18 первой шестерни.
Червячная шестерня 32 выполнена с возможностью вращать червячное колесо вместе с вращением червяка, а также вращать червяк вместе с вращением червячного колеса, т.е. угол скручивания червяка задается выше угла покоя (угла трения), с тем чтобы обеспечивать вождение задним ходом.
[0012] Между входным валом и выходным валом вала 18 первой шестерни, предусмотрен датчик 34 крутящего момента.
Ведущая шестерня 17, выходной вал для вала 18 первой шестерни, червячная шестерня 32, первый поворотный электромотор M1, круговой датчик 33 позиции и датчик 34 крутящего момента, как указано выше, сконфигурированы как неразъемный составной компонент (сборочный узел), который называется первым актуатором A1. Первый актуатор A1 имеет общность с компонентами, составляющими механизм электрического усилителя рулевого управления.
Когда первый поворотный электромотор M1 приводится в действие в состоянии отсоединения муфты 19, вал 18 первой шестерни вращается через червячную шестерню 32 первого актуатора A1, так что углы поворота колес 13L и 13R изменяются в соответствии с углом вращения первого поворотного электромотора M1. Таким образом, первый поворотный электромотор M1 приводится в действие и управляется в соответствии с действием руления водителем в состоянии отсоединения муфты 19, в силу чего требуемые характеристики управления рулением могут достигаться в качестве функции руления по проводам.
[0013] Когда первый поворотный электромотор M1 приводится в действие в состоянии соединения муфты 19, затем крутящий момент электромотора передается на вал 18 первой шестерни через червячную шестерню 32. Таким образом, первый поворотный электромотор M1 приводится в действие и управляется в соответствии с действием руления водителем в состоянии соединения муфты 19, в силу чего требуемые характеристики усиления могут достигаться для того, чтобы уменьшать нагрузку при действии водителя.
На другой стороне (в этом случае на левой стороне транспортного средства) вала 16 зубчатой рейки, вал 36 второй шестерни соединен через ведущую шестерню 35. Иными словами, шестерня 37 зубчатой рейки (зубья) формируется на другой стороне (в этом случае на левой стороне транспортного средства) вала 16 зубчатой рейки, причем ведущая шестерня 35 находится в зацеплении с этой шестерней 37 зубчатой рейки. Состояние зацепления между шестерней 37 зубчатой рейки и ведущей шестерней 35 регулируется посредством удерживающего механизма.
[0014] Вал 36 второй шестерни, например, соединен со вторым поворотным электромотором M2 через червячную шестерню 38. Второй поворотный электромотор M2 имеет тип, идентичный типу первого поворотного электромотора M1. Второй поворотный электромотор M2 содержит круговой датчик 39 позиции, например, для того чтобы обнаруживать угол вращения электромотора.
Червячная шестерня 38 включает в себя червячное колесо, соединенное с валом 36 второй шестерни, и червяк, соединенный со вторым поворотным электромотором M2, причем червячный вал под углом пересекает вал червячного колеса. Это служит для того, чтобы уменьшать модуль в направлении, перпендикулярном валу для вала 36 второй шестерни.
[0015] Червячная шестерня 38 выполнена с возможностью вращать червячное колесо вместе с вращением червяка, а также вращать червяк вместе с вращением червячного колеса, т.е. угол скручивания червяка задается выше угла покоя (угла трения), с тем чтобы обеспечивать вождение задним ходом.
Ведущая шестерня 35, выходной вал для вала 36 второй шестерни, червячная шестерня 38, второй поворотный электромотор M2 и круговой датчик 39 позиции, как указано выше, сконфигурированы как неразъемный составной компонент (сборочный узел), который называется вторым актуатором A2.
[0016] Когда второй поворотный электромотор M2 приводится в действие в состоянии отсоединения муфты 19, вал 36 второй шестерни вращается через червячную шестерню 38 второго актуатора A2, так что углы поворота колес 13L и 13R изменяются в соответствии с углом вращения второго поворотного электромотора M2. Таким образом, второй поворотный электромотор M2 приводится в действие и управляется в соответствии с действием руления водителем в состоянии отсоединения муфты 19, в силу чего требуемые характеристики управления рулением могут достигаться в качестве функции руления по проводам.
[0017] Рулевой вал 12 соединен с электромотором 51 для формирования силы реакции. Электромотор 51 для формирования силы реакции включает в себя ротор, который вращается с рулевым валом 12, и статор, который прикрепляется к корпусу таким образом, чтобы он располагается напротив этого ротора. Ротор включает в себя магниты, расположенные через регулярные интервалы вдоль направления вдоль окружности, которые прикрепляются к сердечнику ротора, например, посредством формования со вставкой. Статор включает в себя железные сердечники, вокруг которых наматываются катушки, расположенные через регулярные интервалы вдоль направления вдоль окружности и прикрепленные к корпусу, например, посредством напряженной посадки. Электромотор 51 для формирования силы реакции содержит круговой датчик 52 позиции, например, для того чтобы обнаруживать угол вращения электромотора.
Рулевой вал 12 содержит датчик 53 угла поворота при рулении.
[0018] Когда электромотор 51 для формирования силы реакции приводится в действие в состоянии отсоединения муфты 19, крутящий момент электромотора передается на рулевой вал 12. Таким образом, электромотор 51 для формирования силы реакции приводится в действие и управляется в соответствии с силой реакции, приложенной от поверхности дороги в состоянии отсоединения муфты 19, и во время выполнения руления по проводам, в силу чего требуемые характеристики силы реакции могут достигаться для того, чтобы прикладывать рабочую силу реакции в ответ на действие руления водителем.
Выше приведена конфигурация устройства рулевого управления.
[0019] Далее описывается конфигурация системы управления.
Настоящий вариант осуществления включает в себя первый контроллер 71 поворота (ECU1 поворота), второй контроллер 72 поворота (ECU2 поворота), контроллер 73 силы реакции (ECU силы реакции). Каждый контроллер включает в себя, например, микрокомпьютер.
Первый контроллер 71 поворота принимает сигнал из кругового датчика 33 позиции, датчика 34 крутящего момента и датчика 53 угла поворота при рулении в качестве ввода для того, чтобы управлять приведением в действие первого поворотного электромотора M1 через схему приведения в действие. Второй контроллер 72 поворота принимает сигнал из кругового датчика 39 позиции и датчика 53 угла поворота при рулении в качестве ввода для того, чтобы управлять приведением в действие второго поворотного электромотора M2 через схему приведения в действие. Контроллер 73 силы реакции принимает сигнал из кругового датчика 52 позиции и датчика 53 угла поворота при рулении в качестве ввода для того, чтобы управлять приведением в действие электромотора 51 для формирования силы реакции через схему приведения в действие.
[0020] Круговой датчик 33 позиции определяет угол θm1 вращения электромотора для первого поворотного электромотора M1. Этот круговой датчик 33 позиции выполнен с возможностью, когда сигнал подачи питания вводится в обмотку статора, выводить сигнал обнаружения в соответствии с углом вращения ротора из катушки ротора. Первый контроллер 71 поворота включает в себя схему обработки сигналов, чтобы выводить сигнал подачи питания в обмотку статора, и определяет угол θm1 вращения электромотора для первого поворотного электромотора M1 на основе амплитудной модуляции сигнала обнаружения, вводимого из катушки ротора. Здесь следует отметить, что первый контроллер 71 поворота трактует правый поворот в качестве положительного значения и левый поворот в качестве отрицательного значения.
Аналогично, угол θm2 вращения электромотора для второго поворотного электромотора M2 определяется посредством второго контроллера 72 поворота через круговой датчик 39 позиции, и угол θr вращения электромотора для электромотора 51 для формирования силы реакции определяется посредством контроллера 73 силы реакции через круговой датчик 52 позиции.
[0021] Датчик 34 крутящего момента обнаруживает крутящий момент Ts, вводимый на вал 18 первой шестерни. Этот датчик 34 крутящего момента обнаруживает угол кручения торсионного вала, расположенного между входной стороной и выходной стороной вала 18 первой шестерни, например, с помощью элемента Холла и преобразует изменение плотности магнитного потока, сформированное вследствие относительного углового смещения между многополюсным магнитом и вилкой, в электрический сигнал и выводит его в первый контроллер 71 поворота. Первый контроллер 71 поворота затем определяет крутящий момент Ts из входного электрического сигнала. Здесь следует отметить, что первый контроллер 71 поворота трактует руление вправо водителем в качестве положительного значения и руление влево в качестве отрицательного значения.
[0022] Датчик 53 угла поворота при рулении включает в себя кодовый датчик угла поворота, например, и обнаруживает угол Gs поворота при рулении рулевого вала 12. Этот датчик 53 угла поворота при рулении включает в себя два фототранзистора, чтобы обнаруживать свет, проходящий через щель дискообразной измерительной шкалы, которая вращается с рулевым валом 12, и выводит импульсный сигнал в соответствии с вращением рулевого вала 12 в каждый контроллер. Каждый контроллер определяет угол θs поворота при рулении рулевого вала 12 из входного импульсного сигнала. Здесь следует отметить, что каждый контроллер трактует правый поворот в качестве положительного значения и левый поворот в качестве отрицательного значения.
[0023] Контроллеры соединяются с возможностью поддерживать взаимный обмен данными через линию 74 связи. Иными словами, они конфигурируют тракт связи с использованием многоканальной связи по CSMA/CA-схеме (CAN: контроллерной сети) либо с использованием бортовой сети связи (бортовой LAN), такой как Flex Ray.
Каждый контроллер соединяется с муфтой 19 через линию 75 связи. Эта линия 75 связи представляет собой тракт связи для того, чтобы выводить сигнал управления муфтой, чтобы обеспечивать переключение между соединением и отсоединением муфты 19. Сигнал управления муфтой служит для того, чтобы отсоединять муфту 19, так что когда каждый контроллер выводит сигнал управления муфтой, муфта 19 отсоединяется, а когда любой из контроллеров прекращает вывод сигнала управления муфтой, то муфта 19 соединяется.
Выше приведена конфигурация системы управления.
[0024] Далее описываются режимы управления.
Настоящий вариант осуществления имеет SBW-режим c использованием двух электромоторов (2M-SBW), EPS-режим c использованием двух электромоторов (2M-EPS), SBW-режим c использованием одного электромотора (1M-SBW), EPS-режим c использованием одного электромотора (1M-EPS) и режим ручного руления (MS).
SBW-режим c использованием двух электромоторов заключается в том, чтобы выполнять управление руления по проводам с использованием двух электромоторов, и EPS-режим c использованием двух электромоторов заключается в том, чтобы выполнять управление рулением на основе электрического усилителя с использованием двух электромоторов. SBW-режим c использованием одного электромотора заключается в том, чтобы выполнять управление руления по проводам с использованием одного электромотора, и EPS-режим c использованием одного электромотора заключается в том, чтобы выполнять управление рулением на основе электрического усилителя с использованием одного электромотора. После этого режим ручного руления заключается в том, чтобы полностью прекращать управление рулением.
[0025] SBW-режим c использованием двух электромоторов
В SBW-режиме c использованием двух электромоторов, когда муфта 19 отсоединяется в ответ на вывод сигнала управления муфтой, первый контроллер 71 поворота приводит в действие и управляет первым поворотным электромотором M1, а второй контроллер 72 поворота приводит в действие и управляет вторым поворотным электромотором M2 для управления углом поворота. Иными словами, первый поворотный электромотор M1 и второй поворотный электромотор M2 взаимодействуют таким образом, чтобы совместно использовать требуемую вращающую силу для вывода. Между тем, контроллер 73 силы реакции приводит в действие и управляет электромотором 51 для формирования силы реакции таким образом, чтобы выполнять управление силой реакции. Это позволяет достигать требуемых характеристик руления в качестве функции руления по проводам и позволяет достигать приятного ощущения при выполнении действий.
Первый контроллер 71 поворота и второй контроллер 72 поворота задают целевой угол θw* поворота для угла θs поворота при рулении и оценивают фактический угол θw поворота. При приеме углов θm1 и θm2 вращения электромотора в качестве ввода, они управляют приведением в действие первого поворотного электромотора M1 и второго поворотного электромотора M2 с использованием надежной схемы согласования с моделью, например таким образом, чтобы заставлять фактический угол θw поворота совпадать с целевым углом θw* поворота.
[0026] Целевой угол θw* поворота может задаваться, например, в соответствии со скоростью V транспортного средства. Иными словами, в ходе руления за счет сухой муфты или в ходе движения на низкой скорости, целевой угол θw* поворота может задаваться таким образом, чтобы достигать большого угла θw поворота от небольшого угла θs поворота при рулении, за счет этого уменьшая нагрузку при действии водителя. В ходе движения на высокой скорости, целевой угол θw* поворота может задаваться таким образом, чтобы подавлять изменение угла θw поворота в отношении изменения угла θs поворота при рулении, за счет этого подавляя слишком чувствительное поведение транспортного средства и поддерживая устойчивость при движении.
Фактический угол θw поворота может оцениваться на основе угла θs поворота при рулении, угла θm1 вращения электромотора, угла θ2 вращения электромотора и т.п.
Контроллер 73 силы реакции задает целевой крутящий момент Tr* силы реакции, соответствующий силе реакции, приложенной от поверхности дороги во время действия руления, и приводит в действие и управляет электромотором 51 для формирования силы реакции таким образом, чтобы заставлять крутящий момент электромотора 51 для формирования силы реакции, совпадать с этим целевым крутящим моментом Tr* силы реакции.
Целевой крутящий момент Tr* силы реакции может задаваться, например, на основе угла θs поворота при рулении, тока Im1, протекающего через первый поворотный электромотор M1, тока Im2, протекающего через второй поворотный электромотор M2, и т.п.
[0027] EPS-режим c использованием двух электромоторов
В EPS-режиме c использованием двух электромоторов, когда муфта 19 соединяется в ответ на прекращение вывода сигнала управления муфтой, первый контроллер 71 поворота приводит в действие и управляет первым поворотным электромотором M1, и второй контроллер 72 поворота приводит в действие и управляет вторым поворотным электромотором M2 для управления усилением. Это позволяет механически соединять систему рулевого управления для того, чтобы поддерживать удобство использования прямого руления и, кроме того, уменьшать нагрузку при действии водителя за счет функции электрического усилителя рулевого управления.
Первый контроллер 71 поворота и второй контроллер 72 поворота задают целевой вспомогательный крутящий момент Ta* и управляют приведением в действие первого поворотного электромотора M1 и второго поворотного электромотора M2 таким образом, чтобы заставлять крутящий момент первого поворотного электромотора M1 совпадать с этим целевым вспомогательным крутящим моментом Ta*.
[0028] Целевой вспомогательный крутящий момент Ta* может задаваться, например, в соответствии со скоростью V транспортного средства. Иными словами, в ходе руления за счет сухой муфты или в ходе движения на низкой скорости, большой целевой вспомогательный крутящий момент Ta* может задаваться таким образом, чтобы уменьшать нагрузку при действии водителя. В ходе движения на высокой скорости, небольшой целевой вспомогательный крутящий момент Ta* может задаваться таким образом, чтобы подавлять слишком чувствительное поведение транспортного средства и сохранять устойчивость при движении.
Между тем, в EPS-режиме c использованием двух электромоторов, релейная схема электромотора 51 для формирования силы реакции отсоединяется. Когда водитель осуществляет действие руления, первый контроллер 71 поворота приводит в действие и управляет первым поворотным электромотором M1, а второй контроллер 72 поворота приводит в действие и управляет вторым поворотным электромотором M2, это служит для приведения в действие электромотора 51 для формирования силы реакции вместе с вращением рулевого вала 12, так что непосредственно электромотор 51 для формирования силы реакции не становится нагрузкой.
[0029] SBW-режим c использованием одного электромотора
В SBW-режиме c использованием одного электромотора, когда муфта 19 отсоединяется в ответ на вывод сигнала управления муфтой, и когда первый контроллер 71 поворота не управляет приведением в действие первого поворотного электромотора M1 (состояние без приведения в действие), второй контроллер 72 поворота приводит в действие и управляет вторым поворотным электромотором M2 для управления углом поворота. Иными словами, только второй поворотный электромотор M2 выводит требуемую вращающую силу. Между тем, контроллер 73 силы реакции приводит в действие и управляет электромотором 51 для формирования силы реакции таким образом, чтобы выполнять управление силой реакции. Это позволяет достигать требуемых характеристик руления в качестве функции руления по проводам и позволяет достигать приятного ощущения при выполнении действий.
[0030] Задание целевого угла θw* поворота, управление посредством второго поворотного электромотора M2, задание целевого крутящего момента Tr* силы реакции и управление посредством электромотора 51 для формирования силы реакции могут быть аналогичными заданию и управлению для SBW-режима c использованием двух электромоторов.
Между тем, в SBW-режиме c использованием одного электромотора, релейная схема первого поворотного электромотора M1 отсоединяется, так что первый поворотный электромотор M1 отсоединяется от схемы. Иными словами, когда второй контроллер 72 поворота приводит в действие и управляет вторым поворотным электромотором M2, это служит для приведения в действие первого поворотного электромотора M1 посредством перемещения вперед/назад вала 16 зубчатой рейки таким образом, что непосредственно первый поворотный электромотор M1 не становится нагрузкой.
[0031] EPS-режим c использованием одного электромотора
В EPS-режиме c использованием одного электромотора, когда муфта 19 соединяется в ответ на прекращение вывода сигнала управления муфтой, и когда второй контроллер 72 поворота не управляет приведением в действие второго поворотного электромотора M2 (состояние без приведения в действие), первый контроллер 71 поворота приводит в действие и управляет первым поворотным электромотором M1 для управления усилением. Это позволяет механически соединять систему рулевого управления для того, чтобы поддерживать удобство использования прямого руления и, кроме того, уменьшать нагрузку при действии водителя за счет функции электрического усилителя рулевого управления.
Задание целевого вспомогательного крутящего момента Ta* и управление посредством первого поворотного электромотора M1 могут быть аналогичными заданию и управлению для EPS-режима c использованием двух электромоторов.
[0032] Между тем, в EPS-режиме c использованием одного электромотора, релейная схема второго поворотного электромотора M2 отсоединяется, так что второй поворотный электромотор M2 отсоединяется от схемы.
Иными словами, когда первый контроллер 71 поворота приводит в действие и управляет первым поворотным электромотором M1, это служит для приведения в действие второго поворотного электромотора M2 посредством перемещения вперед/назад вала 16 зубчатой рейки таким образом, что непосредственно второй поворотный электромотор M2 не становится нагрузкой. По аналогичной причине, релейная схема электромотора 51 для формирования силы реакции также отсоединяется, так что электромотор 51 для формирования силы реакции отсоединяется от схемы. Иными словами, когда водитель осуществляет действие руления, и первый контроллер 71 поворота приводит в действие и управляет первым поворотным электромотором M1, это служит для приведения в действие электромотора 51 для формирования силы реакции посредством вращения рулевого вала 12, так что непосредственно электромотор 51 для формирования силы реакции не становится нагрузкой.
[0033] Режим ручного руления
В режиме ручного руления, когда муфта 19 соединяется в ответ на прекращение вывода сигнала управления муфтой, первый контроллер 71 поворота не управляет приведением в действие первого поворотного электромотора M1 (состояние без приведения в действие), и второй контроллер 72 поворота не управляет приведением в действие второго поворотного электромотора M2 (состояние без приведения в действие). Иными словами, прекращается управление рулением всех контроллеров. Это позволяет механически соединять систему рулевого управления для того, чтобы поддерживать удобство использования прямого руления.
В режиме ручного руления, релейная схема первого поворотного электромотора M1 и релейная схема второго поворотного электромотора M2 отсоединяются, в силу чего первый поворотный электромотор M1 и второй поворотный электромотор M2 отсоединяются от схем. Иными словами, когда водитель осуществляет действие руления, это служит для приведения в действие первого поворотного электромотора M1 и второго поворотного электромотора M2 посредством перемещения вперед/назад вала 16 зубчатой рейки таким образом, что первый поворотный электромотор M1 и второй поворотный электромотор M2 не становятся нагрузкой. По аналогичной причине, релейная схема электромотора 51 для формирования силы реакции также отсоединяется, так что электромотор 51 для формирования силы реакции отсоединяется от схемы. Иными словами, когда водитель осуществляет действие руления, это служит для приведения в действие электромотора 51 для формирования силы реакции посредством вращения рулевого вала 12, так что непосредственно электромотор 51 для формирования силы реакции не становится нагрузкой.
Выше приведено краткое описание режимов управления.
[0034] Далее описывается отказоустойчивый режим.
Каждый контроллер выполняет самодиагностику в отношении того, имеет или нет его система управления анормальность, и переключает режим управления в соответствии с результатом диагностики. Иными словами, первый контроллер 71 поворота диагностирует то, имеют или нет непосредственно первый контроллер 71 поворота, первый актуатор A1, имеющий датчик 34 крутящего момента, и система электропроводки анормальность. Второй контроллер 72 поворота диагностирует то, имеют или нет непосредственно второй контроллер 72 поворота, второй актуатор A2 без датчика крутящего момента и система электропроводки анормальность. Контроллер 73 силы реакции диагностирует то, имеют или нет непосредственно контроллер 73 силы реакции, электромотор 51 для формирования силы реакции и система электропроводки анормальность.
[0035] Во-первых, когда система управления первым контроллером 71 поворота, система управления вторым контроллером 72 поворота и система управления контроллером 73 силы реакции являются нормальными, режим управления становится SBW-режимом c использованием двух электромоторов. В данном документе, во время низкого напряжения или перегрева первого поворотного электромотора M1 и второго поворотного электромотора M2, в ходе запуска при включении зажигания (до тех пор, пока муфта 19 не отсоединится) и во время конечного контакта, при котором угол θw поворота достигает максимального угла поворота, например, режим управления временно становится EPS-режимом c использованием двух электромоторов.
С другой стороны, когда вызывает анормальность, по меньшей мере, одна из системы управления первого контроллера 71 поворота, системы управления второго контроллера 72 поворота и системы управления контроллера 73 силы реакции, режим управления переключается на любой из SBW-режима c использованием одного электромотора, EPS-режима c использованием одного электромотора и режима ручного руления (MS).
[0036] Во-первых, рассматривается случай, в котором система управления вторым контроллером 72 поворота и система управления контроллером 73 силы реакции являются нормальными, но система управления первым контроллером 71 поворота вызывает анормальность. В этом случае, поскольку анормальность возникает только в функции руления по проводам или функции электрического усилителя рулевого управления посредством первого Al актуатора, и функция руления по проводам посредством второго актуатора A2 и функция формирования силы реакции посредством электромотора 51 для формирования силы реакции поддерживаются, режим управления задается как SBW-режим c использованием одного электромотора.
Возникает другой случай, в котором система управления первым контроллером 71 поворота и система управления контроллером 73 силы реакции являются нормальными, но система управления вторым контроллером 72 поворота вызывает анормальность. В этом случае, поскольку анормальность возникает только в функции руления по проводам посредством второго актуатора A2, и функция электрического усилителя рулевого управления посредством первого актуатора A1 поддерживается, режим управления задается как EPS-режим c использованием одного электромотора.
[0037] Возникает еще один другой случай, в котором система управления вторым контроллером 71 поворота и система управления вторым контроллером 72 поворота являются нормальными, но система управления контроллером 73 силы реакции вызывает анормальность. В этом случае, поскольку анормальность возникает только в функции формирования силы реакции посредством электромотора 51 для формирования силы реакции, и функция электрического усилителя рулевого управления посредством первого актуатора A1 поддерживается, режим управления задается как EPS-режим c использованием одного электромотора.
Возникает дополнительный случай, в котором система управления первым контроллером 71 поворота является нормальной, но система управления вторым контроллером 72 поворота и система управления контроллером 73 силы реакции вызывают анормальность. В этом случае, поскольку анормальность возникает только в функции руления по проводам посредством второго актуатора A2 и функции формирования силы реакции посредством электромотора 51 для формирования силы реакции, и функция электрического усилителя рулевого управления посредством первого актуатора A1 поддерживается, режим управления задается как EPS-режим c использованием одного электромотора.
[0038] Возникает еще один дополнительный случай, в котором система управления контроллером 73 силы реакции является нормальной, но система управления первым контроллером 71 поворота и система управления вторым контроллером 72 поворота вызывают анормальность. В этом случае, хотя функция формирования силы реакции посредством электромотора 51 для формирования силы реакции поддерживается, анормальность возникает в функции руления по проводам и функции электрического усилителя рулевого управления посредством первого актуатора A1 и функции руления по проводам посредством второго актуатора A2, и в силу этого режим управления задается как режим ручного руления.
[0039] Возникает другой случай, в котором система управления вторым контроллером 72 поворота является нормальной, но система управления первым контроллером 71 поворота и система управления контроллером 73 силы реакции вызывают анормальность. В этом случае, хотя функция руления по проводам посредством второго актуатора A2 поддерживается, анормальность возникает в функции руления по проводам и функции электрического усилителя рулевого управления посредством первого актуатора A1 и функции формирования силы реакции посредством электромотора 51 для формирования силы реакции, и в силу этого режим управления задается как режим ручного руления.
[0040] Возникает еще один другой случай, в котором все из системы управления первым контроллером 71 поворота, системы управления вторым контроллером 72 поворота и системы управления контроллером 73 силы реакции вызывают анормальность. В этом случае, поскольку все из функции руления по проводам и функции электрического усилителя рулевого управления посредством первого актуатора A1, функции руления по проводам посредством второго актуатора A2 и функции формирования силы реакции посредством электромотора 51 для формирования силы реакции вызывают анормальность, режим управления задается как режим ручного руления.
Выше приведено краткое описание отказоустойчивого режима.
[0041] Далее описывается переход режимов управления.
Во-первых, в случае, если все из системы управления первым контроллером 71 поворота, системы управления вторым контроллером 72 поворота и системы управления контроллером 73 силы реакции являются нормальными, режим управления фактически задается как SBW-режим c использованием двух электромоторов. Затем, во время низкого напряжения или перегрева первого поворотного электромотора M1 и второго поворотного электромотора M2, в ходе запуска при включении зажигания (до тех пор, пока муфта 19 не отсоединится) и во время конечного контакта, при котором угол θw поворота достигает максимального угла поворота, например, режим управления временно становится EPS-режимом c использованием двух электромоторов. После этого, когда низкое напряжение или перегрев первого поворотного электромотора M1 и второго поворотного электромотора M2 разрешается, муфта 19 отсоединяется, и угол θ поворота уменьшается, режим управления становится SBW-режимом c использованием двух электромоторов. Таким образом, при условии, что все из системы управления первого контроллера 71 поворота, системы управления второго контроллера 72 поворота и системы управления функцией контроллера 73 силы реакции являются нормальными, режим управления переключается между SBW-режимом c использованием двух электромоторов и EPS-режимом c использованием двух электромоторов.
[0042] Если система управления первым контроллером 71 поворота вызывает анормальность в качестве первичного отказа, режим управления переходит из SBW-режима c использованием двух электромоторов в SBW-режим c использованием одного электромотора. Если, по меньшей мере, одна из системы управления вторым контроллером 72 поворота и системы управления контроллером 73 силы реакции вызывает анормальность в качестве вторичного отказа, то режим управления переходит из SBW-режима c использованием одного электромотора в режим ручного руления. Таким образом, переход не возникает непосредственно из SBW-режима c использованием двух электромоторов в режим ручного руления при пропуске SBW-режима c использованием одного электромотора, и режим управления переходит пошагово в соответствии с уровнем отказа для резервирования.
[0043] Если, по меньшей мере, одна из системы управления вторым контроллером 72 поворота и системы управления контроллером 73 силы реакции вызывает анормальность в качестве первичного отказа, режим управления переходит из SBW-режима c использованием двух электромоторов в EPS-режим c использованием одного электромотора. Затем, если система управления первым контроллером 71 поворота вызывает анормальность в качестве вторичного отказа, то режим управления переходит из EPS-режима c использованием одного электромотора в режим ручного руления. Таким образом, переход не возникает непосредственно из SBW-режима c использованием двух электромоторов в режим ручного руления при пропуске EPS-режима c использованием одного электромотора, и режим управления переходит пошагово в соответствии с уровнем отказа для резервирования.
[0044] Когда режим управления находится в EPS-режиме c использованием двух электромоторов временно, если, по меньшей мере, одна из системы управления вторым контроллером 72 поворота и системы управления контроллером 73 силы реакции вызывает анормальность в качестве первичного отказа, то режим управления переходит в EPS-режим c использованием одного электромотора. Затем, если система управления первым контроллером 71 поворота вызывает анормальность в качестве второго отказа, режим управления переходит из EPS-режима c использованием одного электромотора в режим ручного руления. Таким образом, переход не возникает непосредственно из SBW-режима c использованием двух электромоторов в режим ручного руления при пропуске EPS-режима c использованием одного электромотора, и режим управления переходит пошагово в соответствии с уровнем отказа для резервирования.
Когда режим управления находится в EPS-режиме c использованием двух электромоторов временно, если система управления первым контроллером 71 поворота вызывает анормальность, то не разрешается переводить режим управления в EPS-режим c использованием одного электромотора. В таком случае, режим управления переходит непосредственно в режим руления вручную.
Выше приведен переход режимов управления.
[0045] Далее описывается базовая обработка управления руления по проводам.
При обработке управления рулением по проводам первый контроллер 71 поворота, второй контроллер 72 поворота и контроллер 73 силы реакции выполняют операции по отдельности, и когда результат операций посредством этих контроллеров совпадает, то выполнение приведения в действие/управления разрешается. Как указано выше, первый контроллер 71 поворота приводит в действие и управляет первым поворотным электромотором M1, второй контроллер 72 поворота приводит в действие и управляет вторым поворотным электромотором M2, и контроллер 73 силы реакции приводит в действие и управляет электромотором 51 для формирования силы реакции.
[0046] Во-первых, когда переключатель зажигания отключен, муфта 19 зацепляется. Затем, когда переключатель зажигания включен, муфта 19 отсоединяется, и SBW-режим c использованием двух электромоторов выполняется.
Руление по проводам задает целевой крутящий момент силы реакции, соответствующий силе реакции, приложенной от поверхности дороги в ответ на действие руления, и приводит в действие и управляет электромотором 51 для формирования силы реакции на основе значения команды управления током, чтобы реализовывать этот целевой крутящий момент силы реакции. В данном документе, сила реакции, приложенная от поверхности дороги, может определяться, например, на основе угла θs поворота при рулении, скорости V транспортного средства, угла θw поворота, тока Im1, протекающего через первый поворотный электромотор M1, и тока Im2, протекающего через второй поворотный электромотор M2. Затем целевой угол поворота задается для угла θs поворота при рулении, и затем первый поворотный электромотор M1 и второй поворотный электромотор M2 приводятся в действие и управляются на основе значения команды управления током, чтобы реализовывать этот целевой угол поворота. В данном документе, целевой угол поворота может задаваться, например, на основе угла θs поворота при рулении и отношения углов поворота при рулении, соответствующего скорости V транспортного средства.
Выше приведена базовая обработка управления при рулении по проводам.
[0047] Далее описывается смещение нейтральной позиции при рулении по проводам.
Когда с рулем 11 осуществляются действия в состоянии, в котором рулевой вал 12 и вал 18 шестерни отсоединяются, и когда оба из первого поворотного электромотора M1 и второго поворотного электромотора M2 находятся в состоянии отсутствия приведения в действие, то угол вращения рулевого вала 12 и угол вращения вала 18 шестерни изменяются. Иными словами, возникает смещение между нейтральной позицией рулевого вала 12 и нейтральной позицией вала 18 шестерни, которое упоминается в качестве смещения нейтральной позиции. Поскольку муфта 19 зацепляется, когда переключатель зажигания отключен, как указано выше, действие руления в этом состоянии не приводит к смещению между нейтральной позицией рулевого вала 12 и нейтральной позицией вала 18 шестерни. Тем не менее, когда переключатель зажигания выключается из включенного состояния, существует небольшое запаздывание во времени между выводом команды для того, чтобы зацеплять муфту 19, и фактическим зацеплением муфты 19. Если действие руления выполняется в течение этой длительности, смещение нейтральной позиции может возникать, и такое смещение нейтральной позиции должно быть скорректировано после того, как начато руление по проводам.
Когда переключатель зажигания включается из выключенного состояния, обработка руления по проводам сначала выполняет обработку для того, чтобы обнаруживать смещение нейтральной позиции. Эта обработка для того, чтобы обнаруживать смещение нейтральной позиции, выполняется только один раз в ходе запуска в первом контроллере 71 поворота, втором контроллере 72 поворота и контроллере 73 силы реакции.
[0048] Далее описывается обработка для того, чтобы обнаруживать смещение нейтральной позиции.
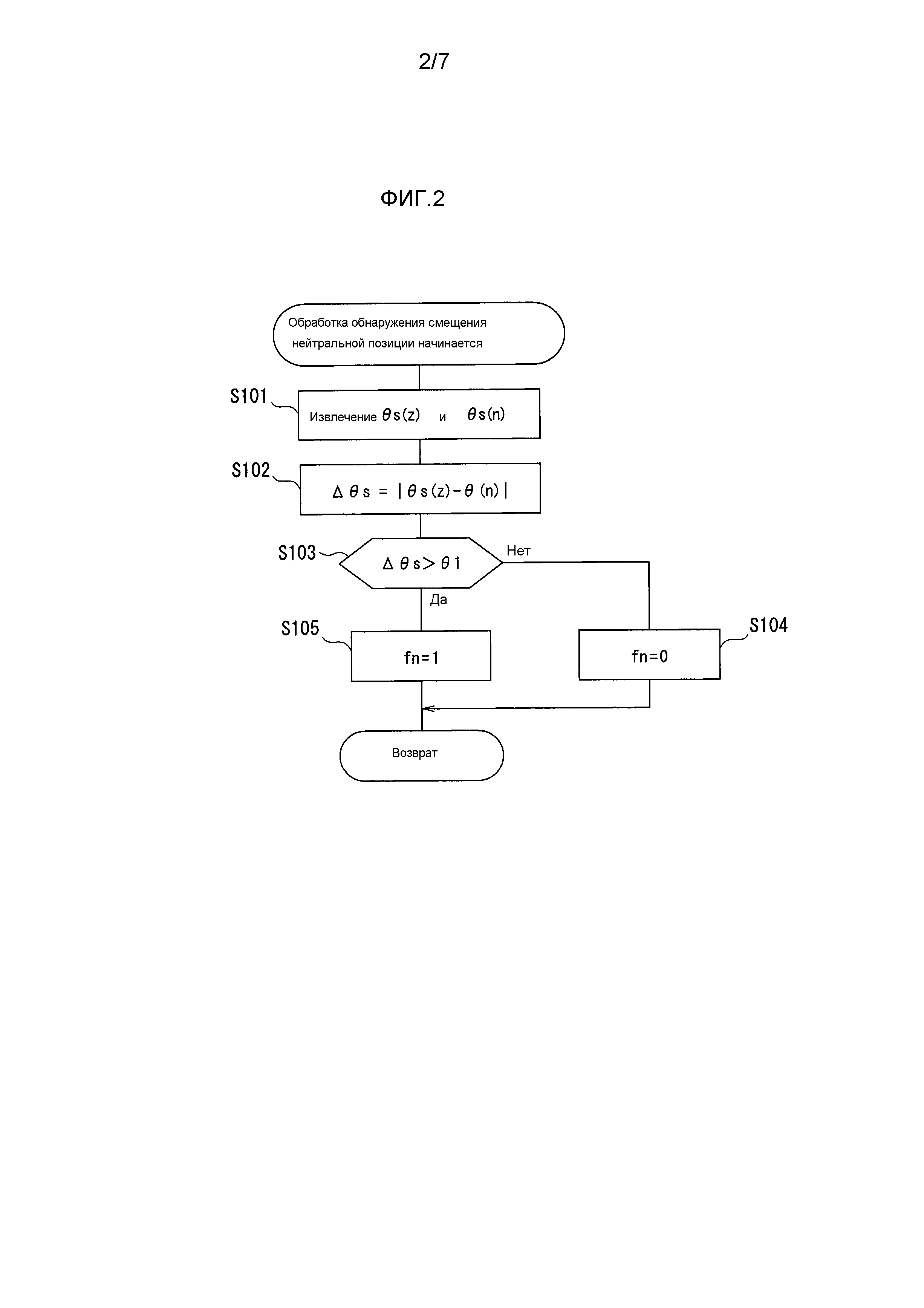
Фиг. 2 является блок-схемой последовательности операций способа, иллюстрирующей обработку для того, чтобы обнаруживать смещение нейтральной позиции.
Во-первых, на этапе S101, извлекаются конечный угол θs(z) поворота при рулении, когда переключатель зажигания выключается из включенного состояния, и начальный угол θs(n) поворота при рулении, когда переключатель зажигания включается из выключенного состояния. Конечный угол θs(z) поворота при рулении сохраняется заранее в энергонезависимом запоминающем устройстве, когда переключатель зажигания выключается из включенного состояния.
На следующем этапе S102, вычисляется разность Δθs(=|θs(z)-θs(n)|) между конечным углом θs(z) поворота при рулении и начальным углом θs(n) поворота при рулении.
[0049] На следующем этапе S103, выполняется определение в отношении того, превышает или нет разность Δθs предварительно определенное пороговое значение θ1. Поскольку это пороговое значение θ1 является значением для того, чтобы определять то, выполняется или нет действие руления после выключения переключателя зажигания, значение является относительно небольшим, например, приблизительно 2 (градуса). В данном документе, когда результат представляет собой Δθs<=θ1, то определяется то, что руль 11 не перемещен, и процедура переходит к этапу S104. С другой стороны, когда результат представляет собой Δθs>θ1, то определяется то, что руль 11 перемещен, и процедура переходит к этапу S105.
[0050] На этапе S104, флаг обнаружения сбрасывается до fn=0, и процедура возвращается в предварительно определенную основную программу. Флаг обнаружения fn=0 представляет то, что отсутствует вероятность (или имеется низкая вероятность) смещения нейтральной позиции.
На этапе S105, флаг обнаружения задается равным fn=1, и процедура возвращается в предварительно определенную основную программу. Флаг обнаружения fn=1 представляет то, что имеется вероятность (или имеется высокая вероятность) смещения нейтральной позиции. Флаг fn обнаружения используется для управления устойчивостью, описанного позднее.
Выше приведена обработка для того, чтобы обнаруживать смещение нейтральной позиции.
[0051] Далее описывается обработка для того, чтобы корректировать смещение нейтральной позиции.
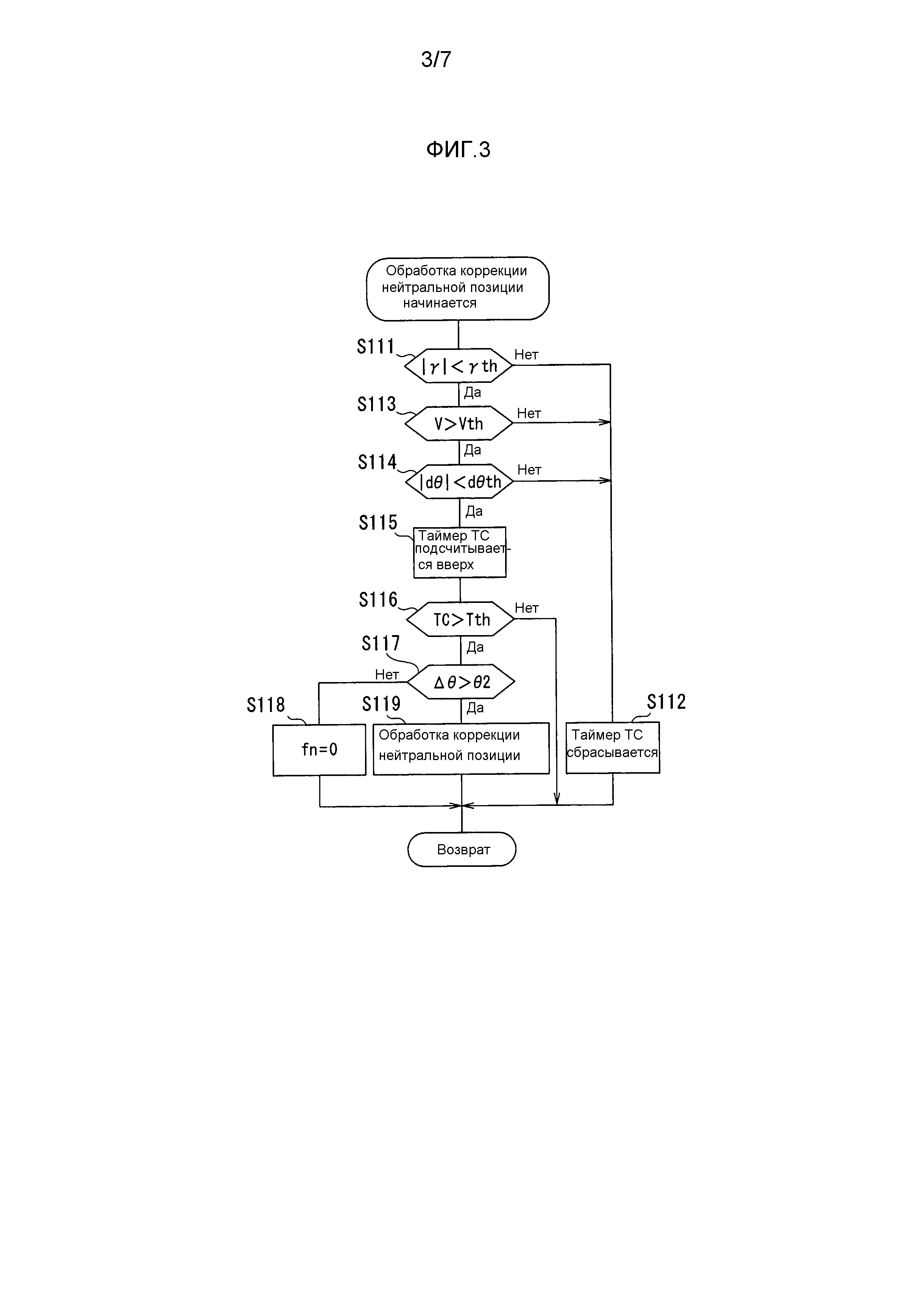
Фиг. 3 является блок-схемой последовательности операций способа, иллюстрирующей обработку для того, чтобы корректировать смещение нейтральной позиции.
Во-первых, на этапе S111, выполняется определение в отношении того, меньше или нет абсолютное значение |γ| скорости относительно вертикальной оси предварительно определенного порогового значения γth. Это пороговое значение γth является значением для того, чтобы определять то, движется транспортное средство практически по прямой вперед или нет, которое может составлять, например, приблизительно 0,4 (градусов/с). Когда результат определения представляет собой |γ|>γth, определяется то, что транспортное средство не едет по прямой вперед, и в силу этого оно не представляет собой время коррекции смещения нейтральной позиции, и процедура переходит к этапу S112. С другой стороны, когда результат определения представляет собой |γ|<γth, определяется то, что транспортное средство движется практически по прямой вперед, и процедура переходит к этапу S113.
На этапе S112, таймер TC сбрасывается, и процедура возвращается в предварительно определенную основную программу.
[0052] На этапе S113, выполняется определение в отношении того, превышает или нет скорость V транспортного средства предварительно определенное Vth. Это пороговое значение Vth является значением для того, чтобы определять то, превышает или нет скорость транспортного средства область низких скоростей, которая может составлять, например, приблизительно 20 км/ч. Когда результат определения представляет собой V
На этапе S114, выполняется определение в отношении того, меньше или нет абсолютное значение |dθ| скорости изменения угла поворота при рулении предварительно определенного порогового значения dθth. Это пороговое значение dθth является значением для того, чтобы определять то, поддерживает или нет водитель фактически руление, которое может составлять, например, приблизительно 10 (градусов/с). Когда результат определения представляет собой |dθ|>=dθth, определяется то, что водитель не поддерживает руление, и в силу этого оно не представляет собой время коррекции смещения нейтральной позиции, и процедура переходит к этапу S112. С другой стороны, когда результат определения представляет собой |dθ| [0053] На этапе S115, таймер TC подсчитывается вверх. На следующем этапе S116, выполняется определение в отношении того, превышает или нет таймер TC предварительно определенную длительность Tth. Эта длительность Tth может составлять, например, приблизительно 3 (секунды). Когда результат определения представляет собой TC<=Tth, определяется то, что водитель может не поддерживать руление, и процедура возвращается в предварительно определенную основную программу. С другой стороны, когда результат определения представляет собой TC>Tth, определяется то, что водитель поддерживает руление в состоянии движения практически по прямой вперед, и что оно представляет собой время, чтобы корректировать смещение нейтральной позиции, и процедура переходит к этапу S117. На этапе S117, выполняется определение в отношении того, превышает или нет величина смещения нейтральной позиции между углом θs поворота при рулении и углом θw поворота, Δθ (=θs-θw), предварительно определенное пороговое значение θ2. Это пороговое значение θ2 может составлять, например, приблизительно 6 (градусов). Когда результат определения представляет собой Δθ<=θ2, определяется то, что смещение нейтральной позиции не возникает, либо смещение, если оно имеется, находится в допустимом диапазоне, и процедура переходит к этапу S118. С другой стороны, когда результат определения представляет собой Δθ>θ2, определяется то, что возникает смещение нейтральной позиции, и процедура переходит к этапу S119. [0054] На этапе S118, флаг обнаружения сбрасывается до fn=0, и процедура возвращается в предварительно определенную основную программу. На этапе S119, проводится обработка для того, чтобы корректировать смещение нейтральной позиции, и затем процедура возвращается в предварительно определенную основную программу. Обработка для того, чтобы корректировать смещение нейтральной позиции, сначала задает угол коррекции для того, чтобы уменьшать разделение между целевым углом поворота, соответствующим углу θs поворота при рулении, и фактическим углом поворота. Затем значение команды управления током корректируется на основе этого угла коррекции, и первый поворотный электромотор M1 и второй поворотный электромотор M2 приводятся в действие и управляются на основе скорректированного значения команды управления током, за счет этого постепенно компенсируя смещение нейтральной позиции. Выше приведена обработка для того, чтобы корректировать смещение нейтральной позиции. [0055] Далее описывается управление устойчивостью. Управление устойчивостью служит для того, чтобы, когда поверхность дороги является скользкой, либо выполняется избежание опасности для помехи, и обнаруживается тенденция поперечного скольжения (избыточного руления) заднего колеса или тенденция поперечного скольжения (недостаточного руления) переднего колеса, повышать устойчивость во время поворота посредством управления двигателем и управления тормозом. Это управление устойчивостью называется VDC (динамическим управлением транспортного средства), ESC (электрическим управлением устойчивостью) и т.п. [0056] Далее приводится краткое описание конфигурации управления устойчивостью. Фиг. 4 описывает конфигурацию системы управления устойчивостью. При управлении устойчивостью, VDC-контроллер 81 (VDC-ECU) выполняет управление устойчивостью в соответствии с определенным значением из различных датчиков. Различные датчики включают в себя датчик 82 скорости вращения колес, датчик 83 скорости относительно вертикальной оси, датчик 84 ускорения и т.п. VDC-контроллер 81 соединяется с другими контроллерами, к примеру, с первым контроллером 71 поворота, вторым контроллером 72 поворота и контроллером 73 силы реакции, через линию 74 связи для поддержки взаимного обмена данными, и принимает, например, сигнал управления углом поворота при рулении в качестве ввода. [0057] Датчик 82 скорости вращения колес обнаруживает скорость VwFL-VwRR вращения колес для каждого колеса. Этот датчик 82 скорости вращения колес обнаруживает магнитные линии силы ротора датчика, например, с помощью схемы обнаружения, преобразует изменение магнитного поля с помощью вращения ротора датчика в сигнал тока и выводит его в VDC-контроллер 81. VDC-контроллер 81 определяет скорость VwFL-VwRR вращения колес из сигнала входного тока. Датчик 83 скорости относительно вертикальной оси обнаруживает скорость γ относительно вертикальной оси кузова транспортного средства. Этот датчик 83 скорости относительно вертикальной оси обеспечен в кузове транспортного средства выше пружины и выполнен с возможностью вызывать вибрацию в осцилляторе, включающем в себя кристаллический камертон, например, с переменным напряжением, преобразует величину искажения в осцилляторе, сформированную из кориолисовой силы, когда вводится угловая скорость, в электрический сигнал и выводит его в VDC-контроллер 81. VDC-контроллер 81 определяет скорость γ относительно вертикальной оси транспортного средства из входного электрического сигнала. VDC-контроллер 81 трактует правый поворот в качестве положительного значения и левый поворот в качестве отрицательного значения. [0058] Датчик 84 ускорения обнаруживает степень ускорения/замедления в продольном направлении транспортного средства. Этот датчик 84 ускорения обнаруживает позиционное смещение подвижного электрода в отношении неподвижного электрода в качестве изменения электростатической емкости, например, преобразует его в сигнал напряжения, который является пропорциональным степени ускорения/замедления и направления, и выводит его в VDC-контроллер 81. VDC-контроллер 81 определяет степень ускорения/замедления из сигнала входного напряжения. VDC-контроллер 81 трактует ускорение в качестве положительного значения и замедление в качестве отрицательного значения. VDC-контроллер 81 выполняет обработку управления устойчивостью и управляет движущей силой через контроллер 85 движущей силы таким образом, что поведение при повороте транспортного средства совпадает с целевым поведением при повороте, и управляет тормозной силой через тормозной контроллер 86. Контроллер 85 движущей силы управляет движущей силой вращательного источника приведения в движение. Когда вращательный источник приведения в движение представляет собой двигатель, например, степень открытия дроссельного клапана, объем впрыска топлива, распределение зажигания и т.п. регулируются для того, чтобы управлять выходной мощностью двигателя (числом оборотов и крутящим моментом двигателя). Когда вращательный источник приведения в движение представляет собой электромотор, выходная мощность электромотора (число оборотов и крутящий момент электромотора) управляется через инвертор. [0059] В качестве одного примера контроллера 85 движущей силы, далее описывается конфигурация дросселя с электронным управлением, чтобы управлять степенью открытия дроссельного клапана. Фиг. 5 описывает конфигурацию системы дросселя с электронным управлением. В тракте 41 впускной трубы (например, во впускном коллекторе), дроссельный вал 42 поддерживается таким образом, что он идет в радиальном направлении, и дискообразный дроссельный клапан 43, имеющий диаметр, меньший внутреннего диаметра тракта 41 впускной трубы, прикрепляется к дроссельному валу 42. Дроссельный электромотор 45 соединен с дроссельным валом 42 через редуктор 44. [0060] Иными словами, когда угол вращения дроссельного вала 42 изменяется посредством вращения дроссельного электромотора 45, дроссельный клапан 43 открывает и закрывает внутреннюю часть тракта 41 впускной трубы. Иными словами, когда направление на плоскости дроссельного клапана 43 располагается вдоль направления, ортогонального осевому направлению тракта 41 впускной трубы, степень открытия дроссельного клапана находится в полностью закрытой позиции, а когда направление на плоскости дроссельного клапана 43 располагается вдоль осевого направления тракта 41 впускной трубы, степень открытия дроссельного клапана находится в полностью открытой позиции. При рассмотрении случая, в котором анормальность возникает в дроссельном электромоторе 45, системе приведения в действие электромотора, системе датчика 46 акселератора, система датчика 49 позиции дросселя и т.п., дроссельный вал 42 механически смещается в направлении открытия, так что дроссельный клапан 43 открывается из полностью закрытой позиции на предварительно определенную величину. [0061] Датчик 46 акселератора имеет две системы и обнаруживает степень PPO открытия педали, которая является пошаговой рабочей величиной (величиной действия) педали 47 акселератора. Датчик 46 акселератора представляет собой потенциометр, например, который преобразует степень открытия педали для педали 47 акселератора в сигнал напряжения и выводит его в контроллер 48 двигателя. Контроллер 48 двигателя определяет степень PPO открытия педали для педали 47 акселератора из сигнала входного напряжения. Датчик 49 позиции дросселя имеет две системы и обнаруживает степень SPO открытия дроссельного клапана для дроссельного клапана 43. Датчик 49 позиции дросселя представляет собой потенциометр, например, который преобразует степень открытия дроссельного клапана 43 в сигнал напряжения и выводит его в контроллер 48 двигателя. Контроллер 48 двигателя определяет степень SPO открытия дроссельного клапана для дроссельного клапана 43 из сигнала входного напряжения. В данном документе, когда дроссельный клапан 43 находится в полностью закрытой позиции, степень SPO открытия дроссельного клапана составляет 0%, а когда дроссельный клапан 43 находится в полностью открытой позиции, степень SPO открытия дроссельного клапана составляет 100%. [0062] Контроллер 48 двигателя типично задает целевую степень SPO* открытия дроссельного клапана в соответствии со степенью PPO открытия педали и задает величину управления электромотором в соответствии с APO между этой целевой степенью SPO* открытия дроссельного клапана и фактической степенью SPO открытия дроссельного клапана. Затем контроллер двигателя преобразует эту величину управления электромотором в продолжительность включения и приводит в действие и управляет дроссельным электромотором 45 посредством значения импульсного тока. При приеме команды управления приведением в действие из контроллера, контроллер 48 двигателя отдает приоритет команде управления приведением в действие для того, чтобы управлять приведением в действие дроссельного электромотора 45. Например, при приеме команды управления приведением в действие для того, чтобы уменьшать движущую силу, контроллер двигателя уменьшает целевую степень SPO* открытия дроссельного клапана в соответствии со степенью PPO открытия педали и приводит в действие и управляет дроссельным электромотором 45. Выше приведено описание контроллера 85 движущей силы. [0063] Далее описывается тормозной контроллер 86. Тормозной контроллер 86 управляет тормозной силой каждого колеса. Например, давление жидкости колесного тормозного цилиндра, обеспеченного в каждом колесе, управляется посредством тормозного актуатора, который используется, например, для антиблокировочного управления (ABS) и механизма регулирования тяги (TCS). Далее описывается конфигурация тормозного актуатора в качестве одного примера тормозного контроллера 86. Фиг. 6 схематично описывает конфигурацию тормозного актуатора. Тормозной актуатор 87 вставляется между главным цилиндром 88 и колесными тормозными цилиндрами 89FL и 89RR. Главный цилиндр 88 представляет собой тандемный тип, который формирует сдвоенную систему для давления жидкости в соответствии с давлением на педали водителя, который представляет собой тип с диагональным разделением, имеющий первичную сторону, которая передается в колесные тормозные цилиндры 89FL/89RR переднего левого и заднего правого, и вторичную сторону, которая передается в колесные тормозные цилиндры 89FR/89RL переднего правого и заднего левого колес. [0064] Каждый колесный тормозной цилиндр 89FL и 89RR обеспечен в дисковом тормозе, который формирует тормозную силу посредством размещения выше и ниже дискового ротора тормозных колодок, либо в барабанном тормозе, который формирует тормозную силу посредством прижатия тормозного башмака к внутренней периферии тормозного барабана. Первичная сторона содержит первый запорный клапан 61А, впускной клапан 62FL (62RR), аккумулятор 63, выпускной клапан 64FL (64RR), второй запорный клапан 65А, насос 66 и демпфирующую камеру 67. [0065] Первый запорный клапан 61А является нормально открытым клапаном, который способен закрывать канал между главным цилиндром 88 и колесным тормозным цилиндром 89FL (89RR). Впускной клапан 62FL (62RR) является нормально открытым клапаном, который способен закрывать канал между первым запорным клапаном 61А и колесным тормозным цилиндром 89FL (89RR). Аккумулятор 63 сообщается между колесным тормозным цилиндром 89FL (89RR) и впускным клапаном 62FL (62RR). Выпускной клапан 64FL (64RR) является нормально закрытым клапаном, который способен открывать канал между колесным тормозным цилиндром 89FL (89RR) и аккумулятором 63. Второй запорный клапан 65А является нормально закрытым клапаном, который способен открывать канал, обеспечивающий сообщение между главным цилиндром 88 и первым запорным клапаном 61А и между аккумулятором 63 и выпускным клапаном 64FL (64RR). Насос 66 имеет сторону всасывания, сообщающуюся между аккумулятором 63 и выпускным клапаном 64FL (64RR), и сторону выпуска, сообщающуюся между первым запорным клапаном 61А и впускным клапаном 62FL (62RR). Демпфирующая камера 67 обеспечена на стороне выпуска насоса 66 для того, чтобы подавлять пульсацию выпускаемой тормозной жидкости и ослаблять вибрацию педали. [0066] Аналогично первичной стороне, вторичная сторона также содержит первый запорный клапан 61B, впускной клапан 62FR (62RL), аккумулятор 63, выпускной клапан 64FR (64RL), второй запорный клапан 65B, насос 66 и демпфирующую камеру 67. Первые запорные клапаны 61А, 61B, впускные клапаны 62FL-62RR, выпускные клапаны 64FL-64RR и вторые запорные клапаны 65А, 65B составляют двухпортовый соленоидный клапан с двупозиционным переключением/с односторонним электромагнитным управлением/с пружинным возвратом. Первые запорные клапаны 61А, 61B и впускные клапаны 62FL-62RR открывают канал в нормальной позиции при отключенном питании, а выпускные клапаны 64FL-64RR и вторые запорные клапаны 65А, 65B закрывают канал в нормальной позиции при отключенном питании. [0067] Аккумулятор 63 включает в себя пружинный аккумулятор, имеющий сжатую пружину, противостоящую поршню цилиндра. Насос 66 включает в себя насос с регулированием пропускной способности, к примеру, шестеренчатый насос или поршневой насос, который может поддерживать практически постоянный объем выпуска независимо от давления нагрузки. При этой конфигурации, в случае первичной стороны, например, когда первый запорный клапан 61А, впускной клапан 62FL (62RR), выпускной клапан 64FL (64RR) и второй запорный клапан 65А находятся в нормальных позициях при отключенном питании, давление жидкости из главного цилиндра 88 непосредственно передается в колесный тормозной цилиндр 89FL (89RR), который нормально служит в качестве тормоза. [0068] Когда с педалью тормоза также не осуществляются действия, подается питание в первый запорный клапан 61А для закрытия при поддержании впускного клапана 62FL (62RR) и выпускного клапана 64FL (64RR) в нормальных позициях при отключенном питании, и подается питание во второй запорный клапан 65А для открытия, и затем насос 66 приводится в действие для того, чтобы поглощать давление жидкости главного цилиндра 88 через второй запорный клапан 65А, и давление выпускаемой жидкости передается в колесный тормозной цилиндр 89FL (89RR) через впускной клапан 62FL (62RR) для повышенного давления. После этого, когда первый запорный клапан 61А, выпускной клапан 64FL (64RR) и второй запорный клапан 65А находятся в нормальных позициях при отключенном питании, и подается питание во впускной клапан 62FL (62RR) для закрытия, в таком случае каналы из колесного тормозного цилиндра 89FL (89RR) в главный цилиндр 88 и аккумулятор 63 блокируются, в силу чего может поддерживаться давление жидкости в колесном тормозном цилиндре 89FL (89RR). [0069] Когда первый запорный клапан 61А и второй запорный клапан 65А находятся в нормальных позициях при отключенном питании, и когда подается питание во впускной клапан 62FL (62RR) для закрытия, и подается питание в выпускной клапан 64FL (64RR) для открытия, то давление жидкости в колесном тормозном цилиндре 89FL (89RR) подается в аккумулятор 63 для пониженного давления. Давление жидкости, протекающей в аккумулятор 63, поглощается посредством насоса 66 и возвращается в главный цилиндр 88. Операции для нормального торможения/повышенного давления/поддержания/пониженного давления на вторичной стороне являются идентичными операциям для первичной стороны, и в силу этого их подробные описания опускаются. Тормозной контроллер 68 приводит в действие и управляет первыми запорными клапанами 61А, 61B, впускными клапанами 62FL-62RR, выпускными клапанами 64FL-64RR, вторыми запорными клапанами 65А, 65B и насосом 66, чтобы повышать/поддерживать/понижать давление жидкости колесных тормозных цилиндров 89FL-89RR. [0070] В настоящем варианте осуществления, используется тип с диагональным разделением, который разделяет тормозную систему между передней левой/задней правой частью и передней правой/задней левой частью, что не является ограничивающим примером. Может использоваться тип с продольным разделением, который разделяет тормозную систему между передней левой и правой частью и задней левой и правой частью. В настоящем варианте осуществления, используется пружинный аккумулятор 63, что не является ограничивающим примером. Он может представлять собой любой тип, например, грузовой, газокомпрессорный с прямым давлением, поршневой, металлический сильфонный, диафрагменный, с эластичной разделительной диафрагмой или рядный, при условии что он может временно накапливать тормозную жидкость, выводимую из колесных тормозных цилиндров 89FL-89RR для пониженного давления. [0071] Настоящий вариант осуществления имеет такую конфигурацию, в которой первые запорные клапаны 61А, 61B и впускные клапаны 62FL-62RR в нормальных позициях при отключенном питании открывают каналы, а выпускные клапаны 64FL-64RR и вторые запорные клапаны 65А, 65B в состоянии при отключенном питании закрывают канал, что не является ограничивающим примером. Первые запорные клапаны 61А, 61B и впускные клапаны 62FL-62RR в смещенных позициях при подаче питания могут открывать канал, а выпускные клапаны 64FL-64RR и вторые запорные клапаны 65А, 65B в смещенной позиции при подаче питания могут закрывать канал при условии, что они могут открывать/закрывать клапаны. [0072] Тормозной контроллер 68 приводит в действие и управляет тормозным актуатором нормально в соответствии с антиблокировочным управлением, механизмом регулирования тяги и управлением устойчивостью, за счет этого управляя давлением жидкости колесных тормозных цилиндров 89FL-89RR. При приеме команды управления приведением в действие из контроллера, тормозной контроллер 68 отдает приоритет команде управления приведением в действие для того, чтобы управлять приведением в действие тормозного актуатора. Например, при приеме команды управления приведением в действие для того, чтобы повышать давление в предварительно определенном колесном тормозном цилиндре для четырех колес, тормозной контроллер повышает нормальное целевое давление жидкости, чтобы управлять приведением в действие тормозного актуатора. Выше приведено описание тормозного контроллера 86. [0073] Далее описывается обработка управления устойчивостью, выполняемая посредством VDC-контроллера 81. Фиг. 7 является блок-схемой последовательности операций способа, иллюстрирующей обработку управления устойчивостью. Во-первых, на этапе S131, извлекается фактическая скорость γ относительно вертикальной оси (фактическая скорость относительно вертикальной оси), обнаруженная посредством датчика 83 скорости относительно вертикальной оси. На следующем этапе S132, целевая скорость γ* относительно вертикальной оси транспортного средства задается в соответствии со скоростью V транспортного средства и углом Gs поворота при рулении. На следующем этапе S133, отклонение Δγ скорости относительно вертикальной оси вычисляется посредством вычитания фактической скорости γ относительно вертикальной оси из целевой скорости γ* относительно вертикальной оси. [0074] На следующем этапе S134, выполняется определение в отношении того, сбрасывается или нет флаг обнаружения до fn=0. Когда результат определения представляет собой fn=0, то определяется то, что смещение нейтральной позиции не возникает, и процедура переходит к этапу S135. С другой стороны, когда результат определения представляет собой fn=1, то определяется то, что возникает смещение нейтральной позиции, и процедура переходит к этапу S136. На этапе S135, предварительно определенное значение Δγ1 задается в качестве порогового значения Δγth для отклонения Δγ скорости относительно вертикальной оси, и процедура переходит к этапу S137. Предварительно определенное значение Δγ1 является значением для того, чтобы определять то, находится или нет транспортное средство в состоянии практически нейтрального руления и отсутствия тенденции избыточного руления и тенденции недостаточного руления. [0075] На этапе S136, предварительно определенное значение Δγ2 задается в качестве порогового значения Δγth для отклонения Δγ скорости относительно вертикальной оси, причем Δγ2 определяется в диапазоне, большем диапазона Δγ1, и процедура переходит к этапу S137. Поскольку предварительно определение Δγ2 задается в диапазоне, большем диапазона Δγ1, имеется большая вероятность определения состояния в качестве нейтрального руления. Иными словами, имеется меньшая вероятность определения в качестве тенденции избыточного руления или тенденции недостаточного руления. На этапе S137, выполняется определение в отношении того, превышает или нет абсолютное значение |Δγ| отклонения скорости относительно вертикальной оси пороговое значение Δγth. Когда результат определения представляет собой |Δγ|<Δγth, определяется то, что транспортное средство не имеет тенденции избыточного руления и тенденции недостаточного руления и находится в состоянии практически нейтрального руления. В таком случае управление устойчивостью (VDC-функция) не активируется, и затем процедура возвращается непосредственно в предварительно определенную основную программу. С другой стороны, когда результат определения представляет собой |Δγ|>Δγth, определяется то, что транспортное средство имеет тенденцию избыточного руления или тенденцию недостаточного руления, и затем процедура переходит к этапу S138. [0076] На этапе S138, выполняется определение в отношении того, меньше или нет отклонение Δγ скорости относительно вертикальной оси 0. Когда результат определения представляет собой Δγ<0, определяется то, что фактическая скорость γ относительно вертикальной оси является слишком большой для целевой скорости γ* относительно вертикальной оси, т.е. транспортное средство имеет тенденцию избыточного руления (OS), и процедура переходит к этапу S139. С другой стороны, когда результат определения представляет собой Δγ>0, определяется то, что фактическая скорость γ относительно вертикальной оси является недостаточной для целевой скорости γ* относительно вертикальной оси, т.е. транспортное средство имеет тенденцию недостаточного руления (US), и процедура переходит к этапу S140. На этапе S139, для того чтобы подавлять тенденцию избыточного руления транспортного средства, активируется управление устойчивостью (VDC-функция), и затем процедура возвращается в предварительно определенную основную программу. В частности, подавляется выходная мощность двигателя, и тормоз активируется в продольных колесах на повороте снаружи, например, для того чтобы формировать момент вокруг центральной оси, чтобы поворачивать к повороту снаружи, за счет этого подавляя тенденцию избыточного руления. Величина управления для двигателя и величина управления для тормозной силы определяются на основе разности между отклонением Δγ скорости относительно вертикальной оси и пороговым значением Δγth. [0077] На этапе S140, для того чтобы подавлять тенденцию недостаточного руления транспортного средства, активируется управление устойчивостью (VDC-функция), и затем процедура возвращается в предварительно определенную основную программу. В частности, тормоз активируется в заднем колесе на повороте внутри, например, для того чтобы формировать момент вокруг центральной оси, чтобы поворачивать к повороту внутри, за счет этого подавляя тенденцию недостаточного руления. Величина управления тормозной силы определяется на основе разности между отклонением Δγ скорости относительно вертикальной оси и пороговым значением Δγth. Выше приведена обработка управления устойчивостью. [0078] Операции Далее описываются операции варианта 1 осуществления. Настоящий вариант осуществления содержит первый поворотный электромотор M1 и второй поворотный электромотор M2, которые могут прикладывать движущую силу к выходному поворотному механизму StOUT, и эти два электромотора выполняют SBW-режим c использованием двух электромоторов, который поворачивает колеса 13L и 13R. Это позволяет реализовывать требуемые характеристики руления в качестве функции руления по проводам. Поскольку два электромотора поворачивают колеса 13L 13R, может совместно использоваться движущая сила, требуемая для выходного поворотного механизма StOUT. Иными словами, увеличение размера электромотора может подавляться и может иметь превосходные конструктивные свойства по сравнению с конфигурацией поворота колес 13L и 13R с одним электромотором. [0079] В конфигурации поворота колес 13L и 13R с двумя электромоторами, если одна из систем управления вызывает анормальность, может использоваться другая система управления без анормальности. Иными словами, в качестве отказоустойчивого режима для первичного отказа, при котором только одна из систем управления вызывает анормальность, могут выполняться SBW-режим c использованием одного электромотора или EPS-режим c использованием одного электромотора. Таким образом, если одна из систем управления вызывает анормальность, используется другая система управления без анормальности, так что может реализовываться отказоустойчивый режим, в котором могут быть полностью использованы преимущества из двух электромоторов. В качестве отказоустойчивого режима для вторичного отказа, при котором оставшаяся система управления также вызывает анормальность из отказоустойчивого режима для первичного отказа, может выполняться режим ручного руления. Это позволяет физически соединять систему рулевого управления и поддерживать удобство использования прямого руления. [0080] После выключения переключателя зажигания, если действие руления выполняется до того, как муфта 19 фактически зацепляется, взаимосвязь между углом θs поворота при рулении и углом θw поворота изменяется, что может приводить к смещению нейтральной позиции. В этом случае, после включения переключателя зажигания, взаимосвязь между углом θs поворота при рулении и углом θw поворота должна корректироваться. Тем не менее, поскольку транспортное средство движется по прямой вперед, например, перед коррекцией взаимосвязи между углом θs поворота при рулении и углом θw поворота, угол θs поворота при рулении может превышать 0. Это может приводить к риску некорректного выполнения управления устойчивостью таким образом, чтобы заставлять поведение при повороте транспортного средства совпадать с целевым поведением при повороте. [0081] После этого, когда переключатель зажигания включается из выключенного состояния, сначала выполняется обработка обнаружения смещения нейтральной позиции. Во-первых, извлекаются конечный угол θs(z) поворота при рулении, когда переключатель зажигания выключается из включенного состояния, и начальный угол θs(n) поворота при рулении, когда переключатель зажигания включается из выключенного состояния (этап S101), и вычисляется разность Δθs(=|θs(z)-θs(n)|) между конечным углом θs(z) поворота при рулении и начальным углом θs(n) поворота при рулении (этап S102). Затем, когда разность Δθs превышает предварительно определенное пороговое значение θ1 (определяется как "Да" на этапе S103), определяется то, что руль 11 перемещен, и смещение нейтральной позиции может возникать, и флаг обнаружения задается равным fn=1 (этап S104). [0082] Управление устойчивостью обнаруживает фактическую скорость γ относительно вертикальной оси (этап S131) и задает целевую скорость γ* относительно вертикальной оси из скорости V транспортного средства и угла θs поворота при рулении (этап S132). Отклонение Δγ скорости относительно вертикальной оси вычисляется между целевой скоростью γ* относительно вертикальной оси и фактической скоростью γ относительно вертикальной оси (этап S133). После этого, когда абсолютное значение |Δγ| отклонения скорости относительно вертикальной оси составляет Δγth или меньше (определяется как "Нет" на этапе S137), управление устойчивостью не активируется. С другой стороны, когда абсолютное значение |Δγ| отклонения скорости относительно вертикальной оси превышает Δγth (определяется как "Да" на этапе S137), управление устойчивостью активируется. [0083] В частности, когда отклонение Δγ скорости относительно вертикальной оси меньше 0 (определяется как "Да" на этапе S138), поскольку транспортное средство имеет тенденцию избыточного руления (OS), подавляется выходная мощность двигателя, и тормоз активируется в продольных колесах на повороте снаружи, например, для того чтобы формировать момент вокруг центральной оси, чтобы поворачивать к повороту снаружи, за счет этого подавляя тенденцию избыточного руления (этап S139). С другой стороны, когда отклонение Δγ скорости относительно вертикальной оси превышает 0 (определяется как "Нет" на этапе S138), поскольку транспортное средство имеет тенденцию недостаточного руления (US), тормоз активируется в заднем колесе на повороте внутри, например, для того чтобы формировать момент вокруг центральной оси, чтобы поворачивать к повороту внутри, за счет этого подавляя тенденцию недостаточного руления (этап S140). [0084] В это время, когда флаг обнаружения составляет fn=0 (определяется как "Да" на этапе S134), задается нормальное пороговое значение Δγth (=Δγ1) (этап S135). С другой стороны, когда флаг обнаружения составляет fn=1 (определяется как "Нет" на этапе S134), задается пороговое значение γth (=Δγ2), большее нормального значения Δγ1 (этап S136). Иными словами, если возникает смещение нейтральной позиции, пороговое значение Δγth задается большим, чтобы подавлять активацию управления устойчивостью. Таким образом, если возникает смещение нейтральной позиции, т.е. в состоянии, в котором поведение при повороте транспортного средства и целевое поведение при повороте не могут сравниваться надлежащим образом, подавляется управление устойчивостью, в силу чего может подавляться некорректное выполнение управления устойчивостью, возникающее в результате смещения нейтральной позиции. [0085] Примеры модификаций В настоящем варианте осуществления, скорость относительно вертикальной оси используется для поведения при повороте, что не является ограничивающим примером. Вместо этого, угол поперечного скольжения кузова транспортного средства, например, может использоваться для поведения при повороте. Иными словами, угол поперечного скольжения обнаруживается, и стандартный поперечный угол задается на основе скорости V транспортного средства и угла θs поворота при рулении. Затем, если отклонение между ними превышает предварительно определенное пороговое значение, может активироваться управление устойчивостью. В настоящем варианте осуществления, предусмотрены два электромотора в виде первого поворотного электромотора M1 и второго поворотного электромотора M2, чтобы прикладывать движущую силу к выходному поворотному механизму StOUT, что не является ограничивающим примером. Вместо этого, может быть предусмотрен только один электромотор. Таким образом, может сокращаться число электромоторов для того, чтобы прикладывать движущую силу выходного поворотного механизма StOUT, в силу чего может уменьшаться число компонентов. В настоящем варианте осуществления, электромоторы используются для поворотного актуатора и актуатора силы реакции, что не является ограничивающим примером. Иными словами, любое средство приведения в действие, к примеру, соленоид или силовой цилиндр, может использоваться при условии, что оно может прикладывать вращающую силу к выходному поворотному механизму StOUT и вращающую силу и силу реакции к входному рулевому механизму StIN. [0086] Соответствующая взаимосвязь В вышеприведенном описании, входной рулевой механизм StIN соответствует "рулевому механизму", выходной поворотный механизм StOUT соответствует "поворотному механизму", рулевой вал 12 соответствует "входному валу", а вал 18 первой шестерни соответствует "выходному валу". Первый поворотный электромотор M1 и второй поворотный электромотор M2 соответствуют "поворотному актуатору", и первый контроллер 71 поворота и второй контроллер 72 поворота соответствуют "модулю управления рулением". Обработка на этапах S133-S140 соответствует "модулю управления тормозной силой". Обработка на этапе S131 соответствует "модулю обнаружения поведения при повороте", а обработка на этапе S132 соответствует "модулю задания целевого поведения при повороте". [0087] Преимущества изобретения Далее описываются преимущества основных частей в варианте 1 осуществления. (1) Устройство управления движением транспортного средства настоящего варианта осуществления активирует управление устойчивостью таким образом, что фактическая скорость γ относительно вертикальной оси транспортного средства приближается к целевой скорости γ* относительно вертикальной оси. Устройство в таком случае содержит входной рулевой механизм StIN, сконфигурированный таким образом, что рулевой вал 12 вращается в соответствии с действием руления водителя, выходной поворотный механизм StOUT, сконфигурированный таким образом, что колеса поворачиваются вместе с вращением вала 18 шестерни, и муфту 19, выполненную с возможностью соединять рулевой вал 12 и вал 18 шестерни с возможностью отсоединения. Устройство содержит первый поворотный электромотор M1 и второй поворотный электромотор M2, которые могут прикладывать вращающую силу к выходному поворотному механизму StOUT, и первый поворотный электромотор M1 и второй поворотный электромотор M2 приводятся в действие и управляются таким образом, что угол θw поворота в соответствии с действием руления водителем реализуется в то время, когда муфта 19 отсоединяется. Затем состояние, в котором нейтральная позиция рулевого вала 12 и нейтральная позиция вала 18 шестерни отличаются, задается как смещение нейтральной позиции, и подавляется управление устойчивостью, если возникает смещение нейтральной позиции. Таким образом, если возникает смещение нейтральной позиции, т.е. в состоянии, в котором поведение при повороте транспортного средства и целевое поведение при повороте не могут сравниваться надлежащим образом, подавляется управление устойчивостью, в силу чего может подавляться некорректное выполнение управления устойчивостью, возникающее в результате смещения нейтральной позиции. [0088] (2) Устройство управления движением транспортного средства настоящего варианта осуществления обнаруживает фактическую скорость γ относительно вертикальной оси транспортного средства и задает целевую скорость γ* относительно вертикальной оси транспортного средства. Затем если отклонение между фактической скоростью γ относительно вертикальной оси и целевой скоростью γ* относительно вертикальной оси превышает предварительно определенное пороговое значение, активируется управление устойчивостью. Если возникает смещение нейтральной позиции, пороговое значение задается выше порогового значения без смещения нейтральной позиции, так что подавляется управление устойчивостью. Таким образом, если возникает смещение нейтральной позиции, пороговое значение задается выше порогового значения без смещения нейтральной позиции, так что может легко подавляться управление устойчивостью. [0089] (3) Устройство управления движением транспортного средства настоящего варианта осуществления приводит в действие и управляет первым поворотным электромотором M1 и вторым поворотным электромотором M2 посредством руления по проводам таким образом, чтобы компенсировать смещение нейтральной позиции, если оно имеется. Таким образом, первый поворотный электромотор M1 и второй поворотный электромотор M2 приводятся в действие и управляются таким образом, чтобы компенсировать смещение нейтральной позиции, что исключает такую ситуацию, когда возникает смещение нейтральной позиции. Иными словами, процедура может возвращаться к нормальному управлению устойчивостью. (4) Устройство управления движением транспортного средства настоящего варианта осуществления формирует разность тормозных сил, по меньшей мере, между левыми и правыми колесами таким образом, что фактическая скорость γ относительно вертикальной оси транспортного средства приближается к целевой скорости γ* относительно вертикальной оси. Таким образом, на основе разности тормозных сил, по меньшей мере, между левыми и правыми колесами, фактическая скорость γ относительно вертикальной оси транспортного средства может легко приближаться к целевой скорости γ* относительно вертикальной оси. [0090] (5) Если конечный угол θs(z) поворота при рулении, когда переключатель зажигания выключается из включенного состояния, и начальный угол θs(n) поворота при рулении, когда переключатель зажигания сначала включается из выключенного состояния, отличаются, устройство управления движением транспортного средства настоящего варианта осуществления подавляет управление устойчивостью до тех пор, пока контроллер руления не компенсирует смещение нейтральной позиции. Таким образом, сравнение между конечным углом θs(z) поворота при рулении и начальным углом θs(n) поворота при рулении обеспечивает возможность удобного и простого обнаружения формирования смещения нейтральной позиции. Иными словами, активация управления устойчивостью может подавляться быстро. [0091] (6) Устройство управления движением транспортного средства настоящего варианта осуществления приводит в действие и управляет первым поворотным электромотором M1 и вторым поворотным электромотором M2 посредством руления по проводам, чтобы реализовывать угол θw поворота в соответствии с действием руления водителем, когда переключатель зажигания включен и в отсоединенном состоянии муфты 19. Когда переключатель зажигания отключен, устройство управления движением транспортного средства прекращает приведение в действие и управление первым поворотным электромотором M1 и вторым поворотным электромотором M2 в состоянии зацепления муфты 19. Таким образом, когда переключатель зажигания отключен, муфта 19 зацепляется, в силу чего смещение нейтральной позиции может быть минимизировано. [0092] (7) Способ управления движением транспортного средства настоящего варианта осуществления активирует управление устойчивостью таким образом, что фактическая скорость γ относительно вертикальной оси транспортного средства приближается к целевой скорости γ* относительно вертикальной оси. Между входным рулевым механизмом StIN, сконфигурированным таким образом, что рулевой вал 12 вращается в соответствии с действием руления водителя, и выходным поворотным механизмом StOUT, сконфигурированным таким образом, что колеса поворачиваются вместе с вращением вала 18 шестерни, вставляется муфта 19, выполненная с возможностью соединять рулевой вал 12 и вал 18 шестерни с возможностью отсоединения. Предусмотрены первый поворотный электромотор M1 и второй поворотный электромотор M2, которые могут прикладывать вращающую силу к выходному поворотному механизму, и первый поворотный электромотор M1 и второй поворотный электромотор M2 приводятся в действие и управляются таким образом, что угол θw поворота в соответствии с действием руления водителем реализуется в то время, когда муфта 19 отсоединяется. Затем состояние, в котором нейтральная позиция рулевого вала 12 и нейтральная позиция вала 18 шестерни отличаются, задается как смещение нейтральной позиции, и подавляется управление устойчивостью, если возникает смещение нейтральной позиции. Таким образом, если возникает смещение нейтральной позиции, т.е. в состоянии, в котором поведение при повороте транспортного средства и целевое поведение при повороте не могут сравниваться надлежащим образом, подавляется управление устойчивостью, в силу чего может подавляться некорректное выполнение управления устойчивостью, возникающее в результате смещения нейтральной позиции. [0093] Содержимое заявки на патент Японии № P2013-003883 (поданной 11 января 2013 года), которая испрашивает приоритет настоящей заявки на патент, включено в данный документ путем ссылки. Пояснение приведено посредством ограниченного числа вариантов осуществления. Объем формулы изобретения не ограничен вышеописанным объемом, и различные модификации раскрытых вариантов осуществления должны быть очевидными для специалистов в данной области техники. Список ссылочных позиций [0094] 11 - руль 12 - рулевой вал 13L и 13R - колеса 14 - рулевой рычаг 15 - поперечная рулевая тяга 16 - вал зубчатой рейки 17 - ведущая шестерня 18 - вал первой шестерни 19 - муфта StIN - входной рулевой механизм StOUT - выходной поворотный механизм 31 - шестерня зубчатой рейки 32 - червячная шестерня M1 - первый поворотный электромотор 33 - круговой датчик позиции 34 -датчик крутящего момента A1 - первый актуатор 35 - ведущая шестерня 36 - вал второй шестерни 37 - шестерня зубчатой рейки 38 - червячная шестерня M2 - второй поворотный электромотор 39 - круговой датчик позиции A2 - второй актуатор 51 - электромотор для формирования силы реакции 52 - круговой датчик позиции 53 - датчик угла поворота при рулении 71 - первый контроллер поворота 72 - второй контроллер поворота 73 - контроллер силы реакции 74 - линия связи 75 - линия связи 81 - VDC-контроллер 82 - датчик скорости вращения колес 83 - датчик скорости относительно вертикальной оси 84 - датчик ускорения 85 - контроллер движущей силы 86 - тормозной контроллер
Реферат
Изобретение относится к управлению движением транспортного средства. Устройство управления движением транспортного средства содержит: модуль обнаружения поведения при повороте; модуль задания целевого поведения при повороте; модуль управления тормозной силой; рулевой механизм; поворотный механизм колеса; муфту, соединяющую рулевой механизм и поворотный механизм с возможностью отсоединения, и поворотный актуатор, прикладывающий вращающую силу к поворотному механизму. Также в устройстве содержится модуль управления рулением, задающий целевой угол поворота колеса в соответствии с действием руления водителем в состоянии, в котором муфта отсоединена, для приведения в действие поворотного актуатора в соответствии с целевым углом поворота и модуль обнаружения угла поворота колеса. Когда возникает смещение позиции так, что целевой угол поворота и угол поворота отличаются, модуль управления тормозной силой задает пороговое значение для активации управления тормозной силой больше порогового значения без смещения позиции. Подавляется некорректное управление тормозной силой при смещении позиции. 2 н. и 8 з.п. ф-лы, 7 ил.
Формула
модуль обнаружения поведения при повороте, выполненный с возможностью обнаруживать поведение при повороте транспортного средства;
модуль задания целевого поведения при повороте, выполненный с возможностью задавать целевое поведение при повороте транспортного средства;
модуль управления тормозной силой, выполненный с возможностью, когда отклонение между поведением при повороте, обнаруженным посредством модуля обнаружения поведения при повороте, и целевым поведением при повороте, заданным посредством модуля задания целевого поведения при повороте, превышает предварительно определенное пороговое значение, активировать управление тормозной силой, чтобы управлять движением в соответствии с отклонением;
рулевой механизм, выполненный с возможностью осуществления руления водителем;
поворотный механизм, выполненный с возможностью поворачивать колесо;
муфту, выполненную с возможностью соединять рулевой механизм и поворотный механизм с возможностью отсоединения;
поворотный актуатор, выполненный с возможностью приложения вращающей силы к поворотному механизму;
модуль управления рулением, выполненный с возможностью задавать целевой угол поворота колеса в соответствии с действием руления водителем в состоянии, в котором муфта отсоединена, чтобы управлять приведением в действие поворотного актуатора в соответствии с целевым углом поворота; и
модуль обнаружения угла поворота, выполненный с возможностью обнаруживать угол поворота колеса, при этом:
когда возникает смещение позиции таким образом, что целевой угол поворота и угол поворота отличаются, модуль управления тормозной силой задает пороговое значение больше порогового значения без смещения позиции.
модуль управления рулением управляет приведением в действие поворотного актуатора в соответствии с целевым углом поворота в состоянии отсоединенной муфты, когда зажигание включено, и прекращает управление приведением в действие поворотного актуатора в состоянии зацепленной муфты, когда зажигание отключено.
модуль управления рулением управляет приведением в действие поворотного актуатора в соответствии с целевым углом поворота в состоянии отсоединенной муфты, когда зажигание включено, и прекращает управление приведением в действие поворотного актуатора в состоянии зацепленной муфты, когда зажигание отключено.
модуль управления рулением управляет приведением в действие поворотного актуатора в соответствии с целевым углом поворота в состоянии отсоединенной муфты, когда зажигание включено, и прекращает управление приведением в действие поворотного актуатора в состоянии зацепленной муфты, когда зажигание отключено.
модуль управления рулением управляет приведением в действие поворотного актуатора в соответствии с целевым углом поворота в состоянии отсоединенной муфты, когда зажигание включено, и прекращает управление приведением в действие поворотного актуатора в состоянии зацепленной муфты, когда зажигание отключено.
вставляют муфту, выполненную с возможностью соединять с возможностью отсоединения рулевой механизм и поворотный механизм между рулевым механизмом, выполненным с возможностью осуществления руления водителем, и поворотным механизмом, выполненным с возможностью поворачивать колесо;
обеспечивают поворотный актуатор, выполненный с возможностью приложения вращающей силы к поворотному механизму;
задают целевой угол поворота колеса в соответствии с рулением водителем и управляют приведением в действие поворотного актуатора в соответствии с целевым углом поворота;
обнаруживают угол поворота колеса; и
когда возникает смещение позиции таким образом, что целевой угол поворота и угол поворота отличаются, задают пороговое значение, для того чтобы активировать управление тормозной силой, больше порогового значения без смещения позиции.
Комментарии