Модуль и носитель для ракетного запуска - RU2736531C1
Код документа: RU2736531C1
Чертежи









Описание
Настоящее изобретение относится к модулю для запуска ракеты, который может работать независимо или может быть установлен на кузове носителя.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
[001] В данной области техники известно различное артиллерийское оборудование для транспортировки и пуска артиллерии. Для наземного использования наиболее известные решения включают в себя транспортные средства, такие как танки и автомобили, и тяговые боевые машины 4x4.
[002] Обычный тип ракеты-носителя включает в себя транспортное средство, корпус которого имеет плоскую опорную поверхность, которая принимает пусковое оборудование. Устройство содержит коробчатую конструкцию с ракетными приемными цилиндрами. Корпус выполнен с возможностью поворота между положением, в котором цилиндры имеют их продольной геометрической оси, параллельной плоскости опорной поверхности, и положением, в котором нижняя поверхность структуры кожуха находится под острым или прямым углом к опорной поверхности, с шарниром с возможностью поворота ось, как правило, расположена рядом с задним концом транспортного средства.
Таким образом, в соответствии с типом и весом используемого вооружения, коробчатая конструкция и сочленяющее устройство должны быть рассчитаны таким образом, чтобы выдерживать вес поворотной конструкции и запускаемых ракет. Как правило, чем больше вес ракет, тем меньше количество, которое можно упаковать за раз в коробчатую конструкцию. Для тяжелого вооружения, такого как ракеты, коробчатая конструкция, как правило, имеет меньшую емкость, вмещая от двух до четырех ракет одновременно.
[004] Вес вооружения влияет как на мощность коробчатой конструкции, так и на конструкцию шарнирной системы шарнирного сочленения. Поскольку обращение с оружием должно осуществляться с большим запасом прочности, система шарнирного соединения должна быть надежной и надежной.
[005] Еще один недостаток, связанный с известным запускающее оборудования является необходимость иметь автомобиль полностью посвященный запуску, как транспортное средство должно быть изменено, чтобы включить поворотную систему шарнирного и сформировать плоскую опорную поверхность.
[006] В дополнение к проблемам, отмеченным выше, известное пусковое оборудование также имеет ограничение, связанное с прицеливанием оружия, так как конструкция коробки имеет ограниченное движение к шарнирному соединению.
[007] В данной области техники известны некоторые решения для обеспечения большей гибкости при запуске оборудования.
[008] EP 1739382 показывает пусковую установку для снаряда, содержащую транспортное средство с поворотной стартовой платформой с множеством пусковых конструкций, расположенных рядом друг с другом.
[009] В EP 2 754 989 показан контейнер для запуска ракеты, который принимается устройством, имеющим боковую часть нацеливающего устройства и вертикальную часть нацеливающего устройства.
[010] Документ JP 2003/056997 описывает ракетную пусковую установку, которая обеспечивает большую свободу регулировки угла запуска.
Система регулировки содержит пневматическую систему с поворотными рычагами.
[011] US 2010/0282150 раскрывает складную рампу, специально приспособленную для использования на судах.
Рампа имеет складную конструкцию, в которой установлены опоры ракеты.
Складная конструкция состоит из шарнирных рычагов.
[012] US 3316809 показывает убирающуюся ракетную установку для бронированного транспортного средства.
Оболочка, содержащая ракеты, установлена на экранированном кольце с системой перемещения гусениц, а для усадки корпуса используется система зубчатой рейки и зубчатой передачи.
В патенте США № 7013790 описана система привода оружия, содержащая опорную клетку, подвижную платформу, несущую оружие, и убирающуюся крышу, покрывающую оружие.
В патенте EP 0 612 969 описывается вездеход с поворотной конструкцией с платформой для буровой установки, где конструкция поворачивается между транспортным положением и рабочим положением.
[015] Однако известные решения либо не обеспечивают прочность, необходимую для поддержки ракетного или ракетного артиллерийского узла, либо содержат чрезмерно сложные конструкции, требующие использования систем с множеством механических рычагов, или приводимые в действие гидравлическими или пневматическими системами.
Таким образом, в данной области техники остается потребность в решении, позволяющем запускать ракеты в стабильную и надежную, но в то же время простую конструкцию, позволяющую использовать модуль независимо или устанавливать в транспортном средстве.
[017] Цели изобретения
[018] Задачей настоящего изобретения является создание стабильного, надежного и универсального модуля для запуска ракеты.
[019] Другой целью настоящего изобретения является создание модуля для запуска ракеты, который может работать независимо или может быть установлен на кузове носителя.
[020] Еще одной целью настоящего изобретения является создание модуля для запуска ракеты, который находится в защищенной конфигурации, когда размещен в втянутой конфигурации в кузове транспортного средства.
[021] Еще одной целью настоящего изобретения является создание модуля для запуска ракеты, у которого втягивание и движение нацеливающего устройства приводятся в действие электрическими приводами.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[022] Настоящее изобретение достигает вышеуказанных целей посредством модуля запуска ракеты, содержащего опорную раму, содержащую, по меньшей мере, одну направляющую; скользящий стол, выполненный с возможностью скольжения по существу вертикально на направляющей, когда он приводится в движение по меньшей мере одним электрическим линейным приводом; и нацеливающее устройство, содержащее поворотное основание, на котором установлен поворотный корпус, поддерживающий опорную часть ракеты.
Скользящий стол содержит платформу, сконфигурированную для приема поворотного стола нацеливающего устройства.
[023] Предпочтительно, опорная рама содержит рамку прямоугольной формы с четырьмя столбцами, каждый из четырех столбцов ограничен направляющей; скользящий стол содержит опорную конструкцию, поддерживающую по существу плоскую платформу; опорная конструкция скользящего стола содержит множество выступов, выполненных с возможностью скольжения в направляющих рамы; и по существу плоская платформа скользящего стола содержит отверстие, в которое помещается поворотный стол нацеливающего устройства.
[024] Чтобы обеспечить стабильное перемещение скользящего стола, модуль дополнительно содержит два линейных исполнительных механизма, расположенных на противоположных концах рамы, причем исполнительные механизмы приводятся в действие электродвигателем и соединяются со скользящим столом посредством переходного элемента.
[025] Предпочтительно, чтобы поворачиваться орган нацеливающего устройства выполнен таким образом, что положение его ось поворота совпадает с центром масс опорной части приемной ракеты в сборе.
[026] Поворотное движение поворотного стола и поворотное движение поворотного тела предпочтительно приводятся в действие электрическим приводом.
[027] Модуль может содержать внешнюю клетку, которая может использоваться для транспортировки или, если она снабжена ножками, позволяет независимо работать с модулем.
[028] Настоящее изобретение дополнительно предусматривает ракетный носитель, включающий: корпус, имеющий верхнее отверстие, которое можно выборочно открывать или закрывать и модуль, при этом, когда отверстие в верхней части корпуса закрыто, скользящий стол находится в отведенном положении относительно рамы, и когда отверстие верхней части тела открыто, скользящий стол скользит вертикально по направляющим рамы в выдвинутое положение, в котором нацеливающее устройство выходит из кузова ракетного носителя.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[029] Настоящее изобретение будет описано более подробно ниже со ссылкой на прилагаемые чертежи, на которых:
[030] Фиг.1 - вид спереди в перспективе модуля запуска в соответствии с вариантом осуществления настоящего изобретения, причем модуль показан в втянутой конфигурации;
[031] Фиг.2 - вид сзади в перспективе модуля запуска в соответствии с вариантом осуществления настоящего изобретения, причем модуль показан в втянутой конфигурации; Фиг.3 - вид в перспективе корпуса модульного пускового модуля в соответствии с одним вариантом осуществления настоящего изобретения;
[033] Фиг.4 представляет собой вид в перспективе внутренней части корпуса модульного пускового модуля в соответствии с одним вариантом осуществления настоящего изобретения;
[034] Фиг.5 представляет собой вид сверху и снизу в перспективе позиционера модульного корпуса модуля запуска в соответствии с одним вариантом осуществления настоящего изобретения;
[035] Фиг.6 - вид спереди в перспективе модуля запуска в соответствии с вариантом осуществления настоящего изобретения, причем модуль показан в втянутой конфигурации и с модульными отсеками для приема ракет;
[036] Фиг.7 - вид сзади в перспективе пускового модуля в соответствии с вариантом осуществления настоящего изобретения, причем модуль показан в втянутой конфигурации и с модульными отсеками для приема ракет;
[037] Фиг.8 - вид в перспективе пускового модуля в соответствии с одним вариантом осуществления настоящего изобретения, причем модуль показан в расширенной конфигурации и с модульными отсеками для приема ракет;
[038] Фиг.9 представляет собой второй вид в перспективе модуля запуска согласно одному варианту осуществления настоящего изобретения, причем модуль показан в расширенной конфигурации и с модульными отсеками для приема ракет;
[039] Фиг.10 представляет собой схематический вид, показывающий основные компоненты модуля разблокировки линейного привода согласно одному варианту осуществления настоящего изобретения;
[040] Фиг.11 - вид в перспективе модуля запуска согласно второму варианту осуществления настоящего изобретения, причем модуль показан в расширенной конфигурации;
[041] Фиг.12 - вид сбоку модуля запуска согласно второму варианту осуществления настоящего изобретения, причем модуль показан в расширенной конфигурации с шарнирной частью запуска; Фиг.13 - вид в перспективе модуля запуска согласно второму варианту осуществления настоящего изобретения, причем модуль показан в втянутой конфигурации;
[043] Фигура 14 - вид в перспективе опорной рамы ракеты-носителя в соответствии со вторым вариантом осуществления настоящего изобретения;
[044] Фиг.15 - вид в перспективе скользящего стола модуля запуска согласно второму варианту осуществления настоящего изобретения;
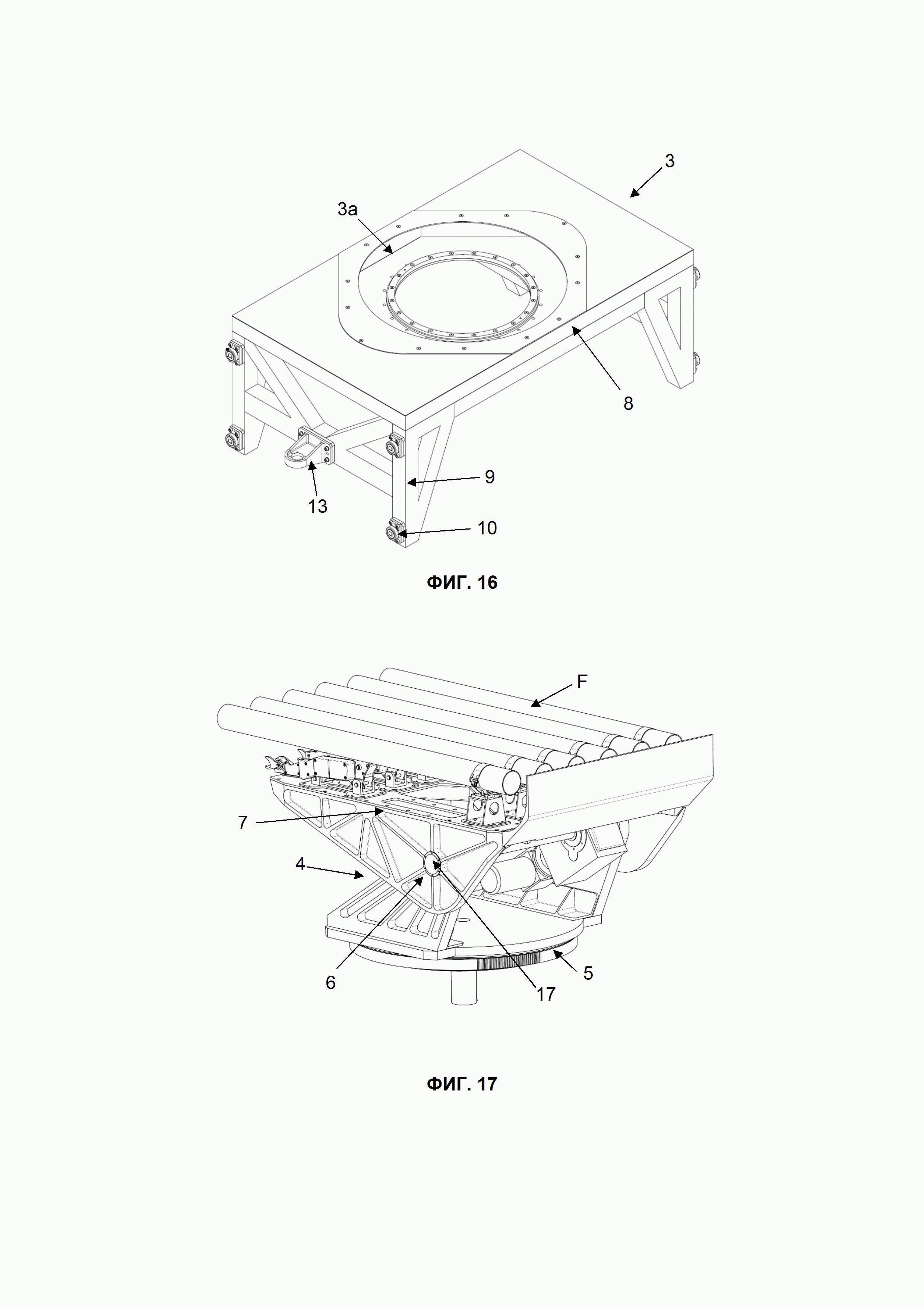
[045] Фигура 16 - вид в перспективе скользящего стола модуля запуска согласно второму варианту осуществления настоящего изобретения;
[046] Фиг.17 - вид в перспективе устройства нацеливания на модуль запуска согласно второму варианту осуществления настоящего изобретения;
[047] Фигура 18 - вид в перспективе внешней клетки модуля запуска в соответствии с одним вариантом осуществления настоящего изобретения; и
[048] Фигура 19 - вид в перспективе внешней клетки модуля запуска в соответствии с одним вариантом осуществления настоящего изобретения, в котором клетки удерживают опорные ножки.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[049] Настоящее изобретение будет описано ниже на основе двух вариантов осуществления изобретения, показанных на фиг.1-19.
[050] На фиг.1 и 2 показаны вид в перспективе спереди и вид в перспективе сзади модуля запуска в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
[051] Модуль запуска содержит опорную раму 1 и стол 3, выполненный с возможностью скольжения по существу вертикально на направляющих опорной рамы 1.
[052] Опорная рама 1 предпочтительно содержит прямоугольную раму с четырьмя столбцами 2, расположенными по углам прямоугольной формы.
Часть внутренней поверхности каждого столбца, то есть часть поверхности каждого столбца, обращенная к раме, образует направляющую 2a.
[053] Скользящий стол 3 выполнен с возможностью приема нацеливающего устройства 4.
Таким образом, в показанном предпочтительном варианте осуществления изобретения скользящий стол 3 содержит отверстие для приема поворотного стола нацеливающего устройства 4.
[054] Предпочтительно, скользящий стол 3 содержит по существу плоскую платформу 8 (с отверстием) и опорную конструкцию 9.
[055] Опорная конструкция 9 содержит плечи, выполненные с возможностью зацепления с направляющими 2а опорной рамы. Предпочтительно опорная конструкция содержит восемь плеч, причем два расположенных на расстоянии друг от друга выровненных плеча расположены так, чтобы они подходили к каждой направляющей 2а.
[056] При такой конфигурации в раме 1 и скользящем столе 3 плоская платформа, поддерживающая нацеливающее устройство 4, может безопасно и стабильно перемещаться вертикально, поскольку платформа поддерживается с возможностью скольжения на четырех колоннах 2a опорной рамы 1.
[057] По существу вертикальное смещение скользящего стола 3 предпочтительно выполняется линейным приводом 11 с электроприводом.
В модуле, показанном на фиг.1 и 2 и с 6 по 9, предусмотрены два линейных привода 11, приводимые в действие одним электродвигателем 12.
[058] Как показано на чертежах, предпочтительно линейные приводы расположены на противоположных концах рамы 1, так что вертикальное перемещение скользящего стола 3 осуществляется стабильно.
Соединение между каждым приводом 11 и скользящим столом осуществляется соответствующей переходной деталью 13, соединенной со столом.
[059] Верхняя часть каждого привода 11 прикреплена к раме 1 с помощью крепежа 14, соединенного с верхней поперечиной 15 рамы 1. Нижняя часть каждого привода 11 прикреплена к раме в нижнем крепежном приспособлении 16.
[060] Как лучше всего видно на фиг. 8 и 9, нацеливающее устройство 4 предпочтительно содержит поворотное основание 5, на котором установлен поворотный корпус 6, поддерживающий опорную часть 7 ракеты.
[061]The поворачиватьс корпус 6 предпочтительно выполнен таким образом, что положение оси поворота совпадает с центром масс / тяжести опорной части 7, получающего модульный ракетный отсек.
[062] Предпочтительно, чтобы поворотное движение поворотного стола 5 и поворотное движение поворотного корпуса 6 приводились в действие электрическим приводом, который может, например, быть соединен с нижней стороной плоской платформы 8 скользящего стола 3.
[063] Опорная часть 7 предпочтительно содержит по существу плоскую верхнюю часть, на которой модульный отсек ракеты поддерживается и закрепляется.
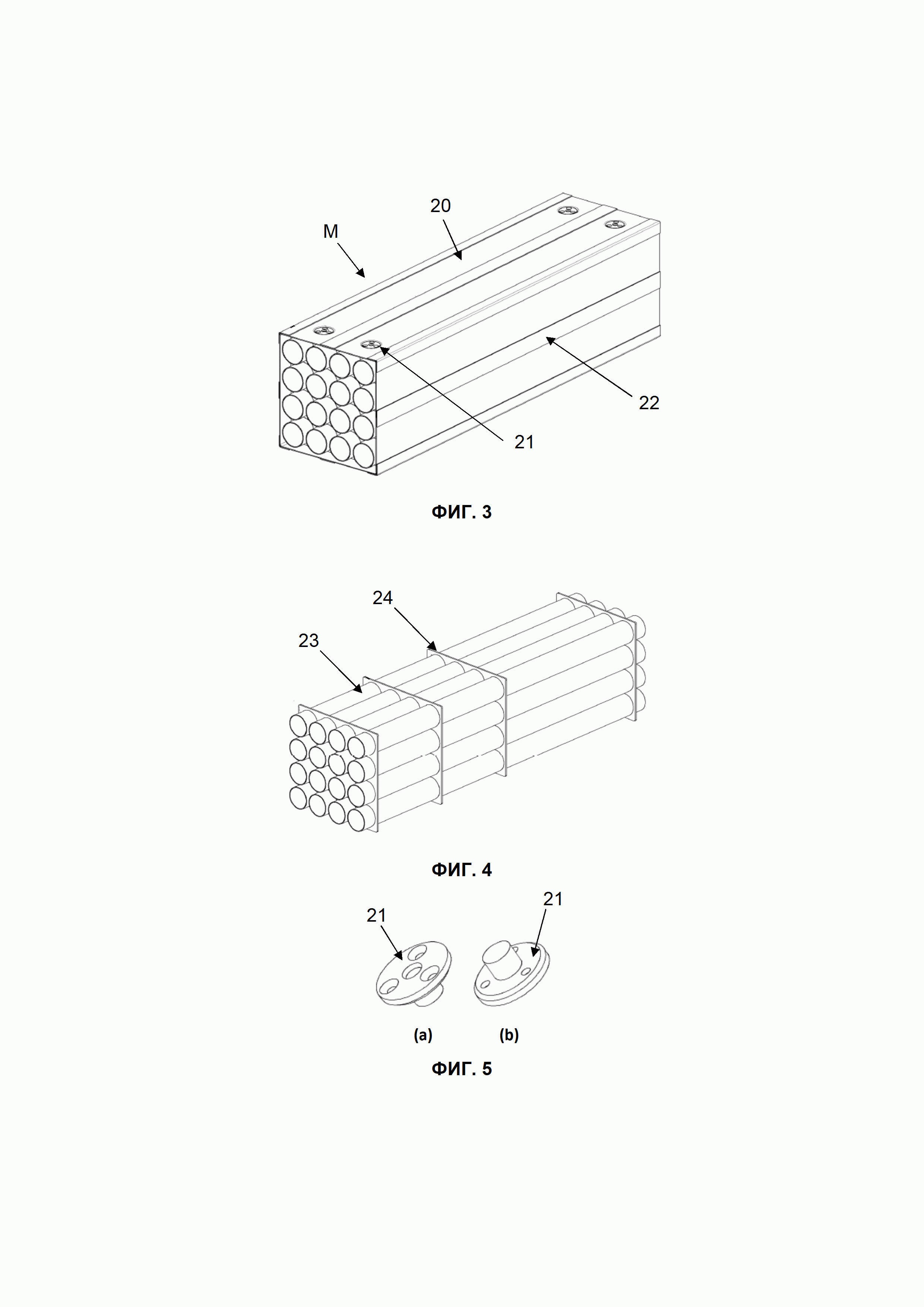
[064] На рисунках 3 до 5 иллюстрирует модульный ракетный отсек M, который прикреплен к опорной части 7 поворотного устройство 4.
[065] Как видно из этих фигур, модульный корпус М содержит внешнюю обертку 20, в которой расположены позиционеры 21. Фиг.5 иллюстрирует виды сверху в перспективе (а) и вид снизу в перспективе (b) позиционера.
[066] Наружная обертка может включать в себя обтекатели 22 в форме продольных плеч.
[067] В предпочтительном варианте осуществления настоящего изобретения внешняя обертка принимает восемь позиционеров, четыре в верхней стенке и четыре в нижней стенке.
[068] Внутренняя часть, показанная на фиг.4, где корпус показан без обертки 20, образована множеством трубок 23 с рамами 24, выступающими в качестве опор и распорок. Трубки действуют как ракетные приемники.
[069] В варианте осуществления, показанном на чертежах, каждое модульное отделение М имеет шестнадцать ракетоприемных трубок.
[070] Благодаря этой конструкции модульные отсеки можно легко транспортировать и хранить. Кроме того, закрепление и замена М отсеков в модуле запуска - это просто, быстро и надежно.
[071] Как показано на фиг.6 и 7, опорная часть 7 устройства 4 наведения модуля запуска может принимать более одного модульного ракетного отсека (на чертеже модуль принимает три модульных отсека).
[072] На фиг.8 и 9 показан стартовый модуль в расширенной конфигурации, то есть после того, как скользящий стол 3 скользит вверх по направляющим 2а в колоннах рамы 2.
[073] Как можно видеть на этих фигурах, при этой конфигурации модульные отсеки М можно направлять, вращая основание 5 и поворачивая поворотный корпус 6.
По мере того как позиционирование оси поворота тела оси 6 совпадает с центром тяжести опорной части 7 с помощью модульных отсеков M, электрическое приведение в действие нацеливающего устройства 4 можно, что уменьшает вес сборки и исключает использование гидравлического или пневматические приводные системы.
[074] На фиг.9 показан предпочтительный вариант выполнения линейного привода 11 в соответствии с настоящим изобретением. В предпочтительном варианте линейный привод содержит следующие элементы: (а) корпус; (б) охват; (в) штекер; (г) фланец; (д) проставки; (f) соединение фланца с корпусом; (ж) шарнир шток-цилиндр; (h) прокладка соединения кузова; (i) втулка; (j) шток цилиндра; (k) фиксированная труба и (I) винт с планетарными роликами, вид из разреза AA, показанного на (m).
[075] На фиг.11-17 показан второй вариант осуществления модуля запуска по настоящему изобретению.
В этом варианте осуществления пусковой модуль принимает набор приемных трубок ракеты или F-ракеты.
[076] На фиг.11 и 12 показан вид в перспективе и вид сбоку модуля запуска в соответствии со вторым вариантом осуществления настоящего изобретения, причем модуль показан в расширенной конфигурации.
На фиг.13 показан вид в перспективе модуля согласно второму варианту осуществления настоящего изобретения в втянутой конфигурации.
[077] Характеристики, аналогичные первому варианту осуществления, будут представлены одинаковыми ссылочными позициями.
[078] Таким образом, модуль запуска содержит опорную раму 1 и стол 3, выполненный с возможностью скольжения по существу вертикально на направляющих опорной рамы 1.
[079] Как лучше всего показано на фиг. 14, опорная рама 1 предпочтительно содержит прямоугольную раму с четырьмя столбцами 2, расположенными по углам прямоугольной формы.
Часть внутренней поверхности каждого столбца, то есть часть поверхности каждого столбца, обращенная к раме, образует направляющую 2а.
[080] Скользящий стол 3 выполнен с возможностью приема нацеливающего устройства 4.
[081] Таким образом, в варианте осуществления, показанном на фиг.16, скользящий стол 3 содержит отверстие 3а для приема поворотного стола нацеливающего устройства 4.
[082] Как показано на фиг.6, скользящий стол 3 содержит по существу плоскую платформу 8, содержащую отверстие 3а и опорную конструкцию 9.
[083] Опорная конструкция 9 содержит плечи 10, выполненные с возможностью зацепления с направляющими 2а опорной рамы. В этом варианте осуществления опорная рама содержит восемь плеч 10, два расположенных на расстоянии друг от друга выровненных плеча расположены так, чтобы соответствовать каждой направляющей 2а.
[084] При такой конфигурации в раме 1 и скользящем столе 3 плоская платформа, поддерживающая нацеливающее устройство 4, может безопасно и устойчиво перемещаться вертикально, поскольку платформа поддерживается с возможностью скольжения на четырех колоннах 2a опорной рамы 1.
[085] По существу вертикальное смещение скользящего стола 3 осуществляется линейным приводом 120 с электроприводом (электрический поршень схематично показан на чертежах). Таким образом, как лучше всего видно на фиг.11, 13 и 15, модуль расцепления предпочтительно содержит два линейных исполнительных механизма 11, приводимых в действие двумя электродвигателями 120.
[086] Как показано на фигуре, предпочтительно линейные приводы расположены на противоположных концах рамы 1, так что вертикальное перемещение скользящего стола 3 осуществляется стабильно.
Соединение между каждым исполнительным механизмом 110 и скользящим столом осуществляется соответствующей переходной деталью 13, соединенной со столом.
[087] Верхняя часть каждого исполнительного механизма 110 прикреплена к раме 1 с помощью крепежного элемента 14, соединенного с верхней поперечиной 15 рамы 1. Нижняя часть каждого исполнительного механизма 11 закреплена на раме в нижнем крепежном приспособлении 16.
[088] Как лучше всего показано на фиг.17, нацеливающее устройство 4 предпочтительно содержит поворотное основание 5, на котором установлен поворотный корпус 6, поддерживающий часть 7 поддержки ракеты.
[089] поворотный корпус предпочтительно выполнен таким образом, что положение оси поворота 17 совпадает с центром масс / тяжести опорной части 7, получающей ракетой приемом сборки F.
[090] Предпочтительно, чтобы поворотное движение поворотного стола 5 и поворотное движение поворотного корпуса 6 приводились в действие электрическим приводом, который, например, может быть соединен с нижней частью плоской платформы 8 скользящего стола 3.
[091] Опорная часть 7 предпочтительно содержит по существу плоскую верхнюю часть, на которой узел F приема ракеты поддерживается и закрепляется.
[092] Как показано на фиг. 18, модуль запуска может дополнительно содержать внешнюю клетку 18, в которую могут быть помещены узел рамы / раздвижного стола / устройства управления нацеливанием и средство привода для транспортировки. Верхняя часть внешней клетки 18 предпочтительно открыта, чтобы обеспечить проход узла.
[093] Как показано на рисунке 19, опорные ножки 19 может быть подключен к клетке 18. Таким образом, клетка 18 может быть использован в качестве опоры шасси для модуля.
[094] В этой связи следует отметить, что пусковой модуль по настоящему изобретению с его электрическими приводами может функционировать полностью независимо от любого транспортного средства.
Таким образом, клетка 18 может служить шасси в случае автономной работы.
[095] Альтернативно, модуль запуска по настоящему изобретению может быть установлен в транспортном средстве, причем рама 1 соединена с внутренней структурой транспортного средства.
[096] Модуль запуска по настоящему изобретению обеспечивает компактное, безопасное и стабильное решение для запуска ракеты (предпочтительно ракеты диаметром 70 мм).
[097] Как показано на фиг.11 и 12, когда скользящий стол 3 находится в расширенной конфигурации относительно рамы 1, нацеливающее устройство 4 может вращаться, и опорная поверхность 7 может поворачиваться для регулировки направления и угла расцепления.
[098] С другой стороны, как показано на фиг.3, когда скользящий стол 3 находится в втянутой конфигурации, сборка становится чрезвычайно компактной. Таким образом, модуль может быть установлен в адаптированном транспортном средстве 4x4, чтобы модуль был полностью внутренним по отношению к транспортному средству, когда его втягивали, и его можно было расширять посредством прогнозируемого отверстия в крыше транспортного средства (при расширении нацеливающее устройство 4 является внешним по отношению к транспортному средству) , кузов автомобиля).
Кроме того, когда скользящий стол 3 скользит по направляющим 2а в колоннах рамы 2, плоскую платформу 8 с нацеливающим устройством 4 можно безопасно и стабильно перемещать в вертикальном направлении, приводя в действие линейный привод, без риска опрокидывания. и без необходимости в гидравлических или пневматических исполнительных системах, что в конечном итоге снижает риск отказов, особенно с учетом условий эксплуатации песка или гравия.
[100] Использование поворотного стола 5 и позиционирование поворотного вала 17 поворотного корпуса 6 также обеспечивает возможность электрического приведения в действие нацеливающего устройства 4, что снижает вес узла и исключает использование гидравлического или пневматического привода. исполнительные системы.
[101] Описав два примера предпочтительного варианта осуществления настоящего изобретения, следует понимать, что объем настоящего изобретения охватывает другие возможные варианты описанной концепции изобретения, ограниченные только содержанием прилагаемой формулы изобретения, включая их возможные эквиваленты.
Реферат
Предложен модуль для запуска ракеты, который содержит опорную раму (1) с по меньшей мере одной направляющей (2а); скользящий стол (3), выполненный с возможностью скольжения вертикально на указанной направляющей (2а) при приведении в действие электрического линейного привода (11). Направляющее устройство (4) содержит вращающийся поворотный стол (5), на котором смонтирован поворотный корпус (6), поддерживающий опорную часть ракеты (7). Скользящий стол (3) содержит платформу (8) для установки поворотного стола (5) направляющего устройства (4). Технический результат - создание модуля для запуска ракеты, у которого втягивание и движение нацеливающего устройства приводятся в действие электрическими приводами. 2 н. и 10 з.п. ф-лы, 19 ил.
Формула
Документы, цитированные в отчёте о поиске
Скрывающееся модульное огневое сооружение
Устройство для подъема и опускания ракетной пусковой установки
Комментарии