Мостовой автоматизированный комплекс прецизионного земледелия - RU2754999C1
Код документа: RU2754999C1
Чертежи
Описание
Изобретение относится к области прецизионного земледелия назначением которого является выполнение комплекса технологических операций, специализированного по возделыванию пропашных культур (картофель, овощи и др.) квадратно-гнездовым способом в автоматизированном режиме с учетом почвенных разностей в пределах малых площадей и требованиий отдельно взятых растений за счет мостового принципа устройства земледельческого комплекса, обеспечивающего значительное снижение непроизводительных энергозатрат (на перемещение агрегата), высокой экологичности использования почв как биологической среды для жизнедеятельности почвенных биоорганизмов, участвующих в формировании плодородия почв, роста и развития корневых систем растений, формирования устойчивой, качественной и высокой урожайности возделываемых культур.
Аналоги мостового автоматизированного комплекса прецизионного земледелия это ряд мостовых биотехнологических систем прецизионного земледелия, энергетических машин и технологических усовершенствований, целью которых является решение проблем автоматизации земледелия, повышения проходимости, снижения разрушительного воздействия движителей машин и механизмов на почву. В целом решение этих и других проблем совершенствования механизации современного земледелия просматривается в трех направлениях: первое - за счет создания постоянной колеи и увеличения ширины тракторов и агрегатов, второе - это снижение уплотнения почвы и повышении проходимости путем увеличения опорной площади движителей и третье, наиболее радикальное решение, это различного рода мостовые системы.
Широкозахватные машины в виде трактора с межколесными осями длиной 5,8 метров предлагаются израильскими специалистами (1), существенными недостатками этих машин являются широкие разворотные полосы, недостаточная проходимость, сложность выполнения точности технологических параметров. Постоянная колея - труднореализуемая проблема по причине широкого конструктивного набора различных по мощности и предназначению машин, применяемых в земледелии (трактора типа МТЗ, К-700, Д-74 и др.) имеющих различные межколесные (гесеничные) расстояния. Наиболее радикально проблема прецизионного земледелия и снижения уплотнения почвы решается мостовыми устройствами. Это мостовые комплексы в основе перемещения которых лежит железнодорожное полотно (2) и некоторые другие решения в виде мостовых систем на тросовых подвесках (3), воздушных, типа дирижаблей, и другие агрегаты (4, 5, 6).
В большей степени близкими к заявленному изобретению по эффективности решения в области экологичности, техническому устройству, качеству выполнения требований технологий, решению условий автоматизации и цифровизации агротехнологических процессов относятся следующие агротехнические комплексы: автоматизированный мостовой комплекс АМАК, автоматизированная агротехническая самодвижущаяся платформа ААСП (7) и мостовой робото-комплекс точного земледелия МРКТЗ (8). Основой последних двух комплексов является платформа, на которой смонтированы автоматизированные технологические модули, энергетические и обеспечивающие агрегаты. Перемещение платформы осуществляется за счет пошагового выдвижения рельс-движителей, по которым в свою очередь перемещается платформа, выполняя технологические операции.
Комплекс АМАК представлен в виде земледельческого завода, перемещающегося по железнодорожным путям. В комплексе ААСП для устойчивости передвижения платформы по полю используются специально оборудованные опорные точки в виде бетонных блоков, размещенных на гравийно-галичных подушках, по которым пошагово перемещаются блок-рельсы. В третьем варианте при некоторых изменениях в опорных устройствах платформы принципиально иной принцип обустройства полигона. Практически этот вариант мостовой агротехники предназначен для работ на мелиоративных земледельческих участках, оборудованных галично-гравийными дренажом, которые в данном случае выполняют функцию постоянной жестко-фиксированной колеи, обеспечивая устойчивую работу мостового комплекса.
К основным признакам аналогов мостовых систем мостовых самодвижущихся платформ ААСП и МРКТЗ являются особенности оборудования полигона (обрабатываемых земельных участков) в первом случае путем устройства постоянной колеи площадками с бетонными блоками, расположенными через 10 м на гравийно-галичных подушках и другой вариант мостовой системы предназначен для работы на мелиоративных массивах, где гравийно-галичные дрены одновременно с функциями регулирования водного режима выполняют роль постоянной колеи, обеспечивающей устойчивое жесткофиксированное перемещение мостовой системы. В обоих системах агротехнические операции выполняются технологическими модулями путем поперечного (по отношению к обрабатываемого участка - клетки поля) передвижения, в целях экономии средств и материалов на обустройство постоянные колеи на них располагаются на значительном удалении через 30 м. Принцип перемещения этих мостовых систем заключается в пошаговом выдвижении и укладке на жестко оборудованные колеи рельс-балок, по которым двигается платформа. Аналоги - мостовые системы за счет жесткости конструкций и колеи обеспечивают возможность для внедрения робото-техники, прецизионного земледелия и связанных с этим возможностей компьютеризации производства, обеспечивающее высокую производительность труда, экономичность, экологичность и привлекательность земледелия.
Недостатки комплексов АМАК, в основе которого положена металлоемкая и дорогостоящая система перемещения в виде железнодорожной колеи, а так же комплекса ААСП требующего относительно материалоемкого оборудования полигона в виде бетонных блоков и комплекса МРКТЗ ограниченного использования в виде полей капитально мелиорированных гравийно-дренажными системами и будут решены в предлагаемом варианте унифицированного мостового земледельческого автоматизированного комплекса МАКПЗ.
Задачей предлагаемого изобретения является реализация возделывания пропашных сельскохозяйственных культур по квадратно-гнездовой технологии в автоматизированном режиме согласно заданной цифровой (компьютерной) программы на высоком экологическом уровне.
Техническим результатом заявленного изобретения является возможность внедрения компьютеризации технологических процессов, повышение проходимости за счет жесткости опоры, возможность нормированного обеспечения элементами жизнеобеспечения растений с учетом пестроты уровня агрохимической характеристики на малых площадях и отдельных растений, исключение перенасыщения химическими средствами, используемыми в растенееводстве, снижение негативных воздействий используемых в земледелии механизмов на почвенное плодородие (уплотнение почвы, разрушение структуры, ухудшение водного и пищевого режимов почвы и др.), сохранение и повышение плодородия почв устойчиво высокой урожайности и высокого качества сельскохозяйственной продукции, повышение производительности труда, снижение энергозатрат и повышение привлекательности земледельческого труда.
Выполнение намеченных задач комплексом МАКПЗ предполагается за счет ряда новаций и технических решений по совершенствованию конструкций аналогичных мостовых комплексов (АМАК, ААСП, МРКТЗ), принципа их работы, принципиально новом решении устройства постоянной колеи в виде дернины многолетних трав, отличающихся устойчивостью на разрыв и высокой несущей способностью, по которым перемещается мостовой комплекс.
Оригинальность конструктивных решений заключается в пошаговом перемещении комплекса за счет периодически выдвигающихся опорных систем в виде рельс-движителей, по которым перемещается мостовая платформа, выполняя заданные операции в двух направлениях. По ходу движения платформы рабочими органами проводится обработка почвы (вспашка, нарезка гряд), уборка высокостебельных культур (подсолнечник, кукуруза и др.), после выхода на конец рельс-движителей и остановки платформы технологический модуль, продвигаясь поперек делянки по боковым балкам платформы, выполняет посев (посадку) семян (рассады, саженцев), внесение удобрений, размещая их по заданной компьютерной программе квадратно-гнездовым способом. В процессе вегетации растений обработка проводится таким же образом в двух направлениях. Квадратно-гнездовой способ посева имел широкое распространение в середине 50-х годов (9, 10) прошлого столетия. По данным Карпенко A.M., Кречетова (9), Беликова (10) при квадратно-гнездовом посеве на 40-60% меньше требуется семян, при этом урожайность по сравнению с обычным широкорядным посевом повышается на 30 и более процентов. В настоящее время этому способу посадки проявляется повышенное внимание по причине высокой его эффективности и новых возможностей его механизации.
Комплекс МАКПЗ включает 3 блока: первый - полигон в виде участка поля с постоянной колеей для перемещения комплекса, второй блок представлен самодвижущейся платформой с системой перемещения и энергетическим оборудованием и третий блок в виде автоматизированного технологического модуля выполняющего заданные операции.
Принципиальная схема обустройства работы комплекса выглядит следующим образом. Первый блок в виде полигона представляющего собой массив севооборота в котором каждый участок поля шириной примерно 10-15 м (на ширину мостового комплекса) ограничен на всю длину полосами шириной порядка 3 м засеянными видами многолетних трав, характеризующихся корневой системой, образующей плотную устойчивую к механическому воздействию дернину, выполняющую в данном случае роль постоянной колеи для перемещения мостового комплекса. Поскольку воздействие опорных рельс-балок, обеспечивающих пошаговое перемещение комплекса на многолетние травы в данном случае носит кратковременный характер особо негативных последствий на рост, развитие, а так же формирование урожая травы и повышения плодородия это не будет оказывать существенного влияния. Такие постоянные колеи обеспечат устойчивое всепогодное перемещение мостового комплекса, одновременно выполняя роль поля севооборота как эффективного предшественника сельскохозяйственных культур. Второй технологический блок - это конструкция в виде платформы шириной и длиной примерно 10-15 м. В продольных балках размещаются 20-30 - метровые рельс-движители, по которым за счет пошагового перемещения при их укладке на дерновую поверхность колеи осуществляется передвижение платформы по полю.
На платформе монтируется третий блок - система для обработки поля в двух направлениях, а так же энергетические и обслуживающие агрегаты. Первая группа рабочих органов, выполняющая основную обработку почвы, смонтирована по краям двух сторон платформы с учетом перехода платформы на следующее поле полигона и для удобства уборки высокостебельных культур (кукуруза, подсолнечник и др.). Вторая группа технологических механизмов выполняет работы по внесению удобрений и других средств жизнеобеспечения растений, а так же квадратно-гнездового высева семян и рассады овощных культур. Эти рабочие органы перемещаются по поперечным балкам платформы, выполняя перечисленный комплекс операций, а так же проводит поперечную обработку посевов в процессе вегетации растений. Весь технологический комплекс работает в активном, роботизированном по заданной компьютерной программе режимах. Набор обеспечивающих механизмов (энергетических, нормирующих и др.) располагается на втором ярусе платформы.
Мостовой комплекс действует по принципу четкого разделения функции почвенной поверхности как среды обитания культивируемых растений и почвенной биоты и как несущей поверхности для перемещения агротехнических механизмов.
Несущая поверхность в рассматриваемом комплексе представляется в виде постоянной колеи шириной порядка 3 м, засеянной многолетними травами, образующими плотную дернину устойчивую к механическим нагрузкам. К видам таких многолетних трав относятся, например, кострец безостый (Bromus Leves), овсяница красная (Festuca rubra L.). Наибольшую прочность дернина этих видов трав приобретает на третий год вегетации. Таким образом, колея в первый год засевается на трехкратную ширину опорных балок в 3 м и далее каждый год перемещается на 1 м рабочей ширины колеи. Прежде используемая часть колеи в 1 м перепахивается, эта площадь засевается соответствующей культурой севооборота, а система использует под колею следующую часть дернины достигшей трехлетнего возраста, вегетативная масса многолетних трав с колеи используется на корм скоту или как сидеральное удобрение.
По технологическому качеству дернина этих трав относится к группе «отличных» с показателями соответствия на разрыв у овсяницы красной 18 кг на площадь сечения дернины 100 см2, у костреца до 8 кг. Хорошо развитая дернина из овсяницы красной с травостоем в пределах 450 побегов на 400 см2 при влажности 80% полной полевой влажности, имеет несущую способность 22 кг/см2, у костреца безостого несущая способность так же достаточно высокая, порядка 10,7 кг/см2 (12, 13, 14). Эти два вида трав отличаются высокими показателями дернинообразования, так кострец безостый по характеристикам показателей корневой системы (долговечности, зимостойкости) характеризуется как «отличный» вид и только по засухостойчивости с оценкой «хорошо», кострец безостый отлично переносит длительное затопление, отличается высокой осемяняемостью до 5-7 ц семян с 1 га (15), что очень важно для условий муссонного климата Дальнего Востока.
Технологический блок-комплекс представляет собой мостовую платформу 10-15 м, выполненную из металлических конструкций. Платформа включает собой систему перемещения в виде рельс-движителей, размещенных внутри полых балок платформы длиной по 20-30 м. Перемещение осуществляется путем пошагового выдвижения рельс-движителей с последующим укладыванием их на колею, по которым перемещается платформа. Переход мостовой платформы на последующую клетку (участок поля) происходит по дорогам, ограничивающим полигон, эта операция осуществляется с помощью двухколесных движителей, размещенных на торцевых частях платформы.
Система, осуществляющая выполнение агротехнических операций, состоит из технологического модуля и обеспечивающих служб в виде энергетических, управляющих механизмов, а так же емкостей обеспечивающих материалов (семена, удобрения, химические средства и др.) и части урожая, собранного с очередного участка поля.
Рабочие органы обеспечивают выполнение квадратно-гнездовой технологии возделывания сельскохозяйственных культур. Реализация этой технологии выполняется двумя комплексами рабочих органов. Первый комплекс размещен на двух сторонах платформы, который выполняет работы по основной обработке почвы (рыхление, нарезка гряд и др.) в двух направлениях. Эта работа выполняется в процессе перемещения платформы по балка-опорам, лежащим на задерненных колеях. При выходе платформы на конец блок-балок и ее остановки поперек клетки по поперечным балкам платформы перемещается каретка с набором рабочих органов, выполняющих внесение удобрений, высев семян, высадку рассады овощных культур квадратно-гнездовым способом.
В целях достижения технического результата в предлагаемом комплексе при условии сохранения основных технических и технологических новаций (ААСП и МРКТЗ), таких как, высокой экологичности земледелия за счет мостового принципа устройства земледельческого комплекса и создания постоянной колеи, возможности внедрения робототехники и компьютеризации производств, высокой производительности и привлекательности труда, предлагается ряд принципиально новых решений.
К решающим отличительным характеристикам в предлагаемом комплексе относятся устройство постоянной колеи путем посева многолетних трав, формирующих плотную дернину, способную выдержать создаваемую платформой нагрузку без разрушения колеи как несущей поверхности. При этом колеи из многолетних трав шириной до 3 м являются своего рода одним из полей севооборота, около 1 м которой последовательно перепахивается для размещения предусмотренных ротацией севооборота культур. Взамен этого ежегодно засевается 1 м многолетних трав под будущую колею. Вегетативная масса многолетних трав испытывает при перемещении платформы кратковременное за летний период одно-двухразовое уплотнение рельс-балок без значительного ущерба на урожайность травы, которая и используется на корм скоту или как сидерат на удобрение. Практически беззатратное создание постоянной колеи для работы мостовой системы обуславливают экономические и материальные предпосылки для конструкции малогабаритных мостовых систем шириной 10-15 м для использования их в малых сельскохозяйственных (фермерских) хозяйствах. Относительно небольшие габариты МАКПЗ обеспечивают возможность изменить принцип выполнения технологических операций, в частности создаются условия для квадратно-гнездовой технологии возделывания культур за счет обработки почвы и формировании гряд в процессе передвижения платформы по рельс-балкам вдоль поля, другая часть работ, таких как внесение удобрений и химико-биологических препаратов, а так же посев семян и высадка рассады выполняется технологическим модулем при передвижении его по боковым балкам платформы поперек поля. При переходе платформы на следующее поле для продольной его обработки предусмотрен дублирующий вариант рабочих органов, смонтированных на другой стороне платформы.
Схема устройства и принцип работы предоставлены на фигурах.
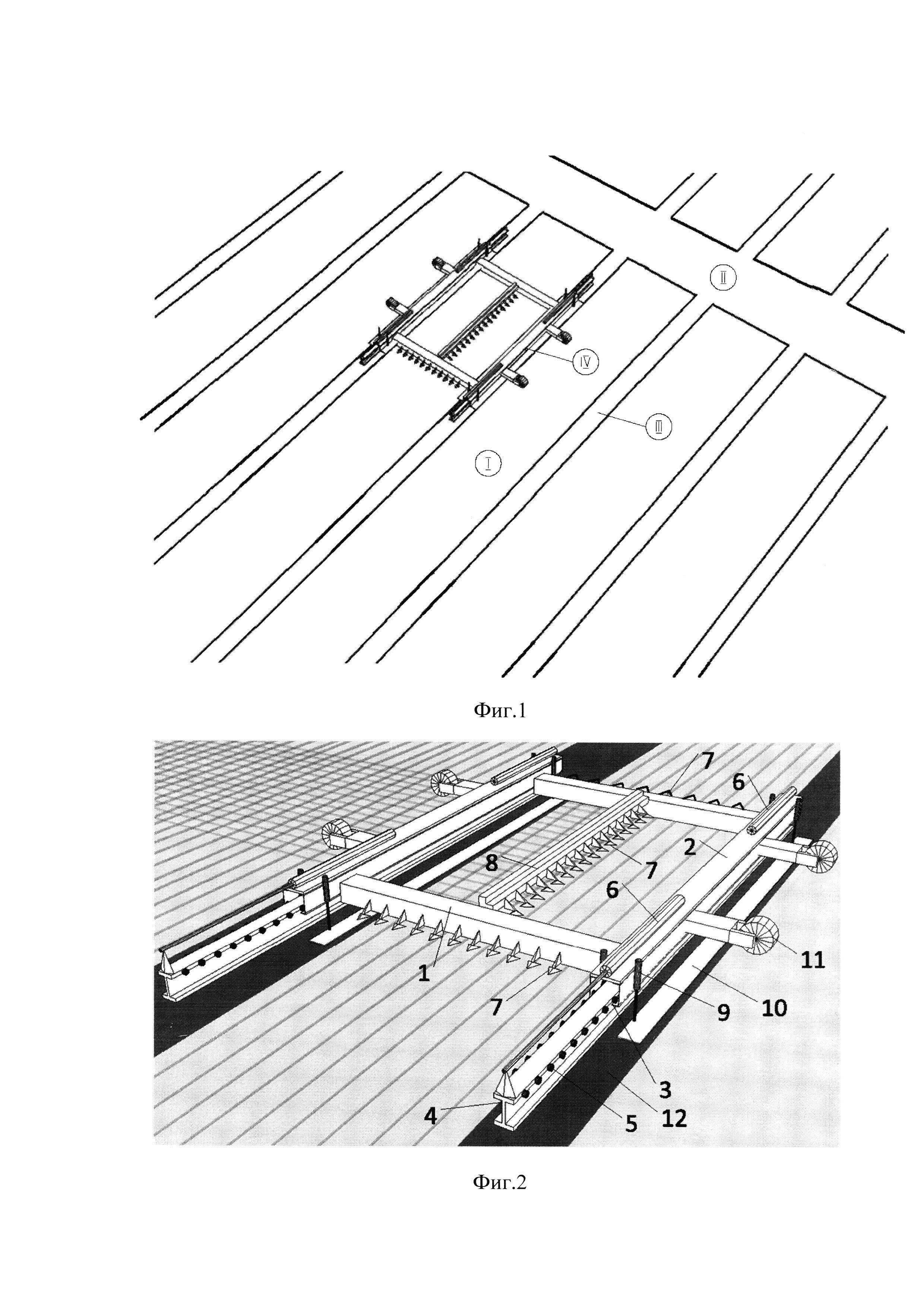
На фиг. 1 представлена схема обустройства земельного участка. Земельный участок состоит из делянок I шириной 10-15 м, длиной в зависимости от площади участка. Между делянками проложены колеи, а по краям массива проходит благоустроенная дорога II, по которой осуществляется переход платформы IV на очередную делянку, обеспечение необходимыми материалами и оборудованием. Колеи III по которым осуществляется перемещение мостовой платформы IV засеваются в первый год до начала эксплуатации массива многолетними травами на ширину около 3 м, на третий год вегетации при достижении максимальной плотности дернины 1 м ее ширины используется как колея. В последующие годы колея проходит по оставшейся части посева многолетних трав, использованная часть колеи распахивается и засевается планируемыми культурами, очередной участок делянки шириной около 1 м засевается многолетними травами, по истечении трех лет он становится очередной колеей.
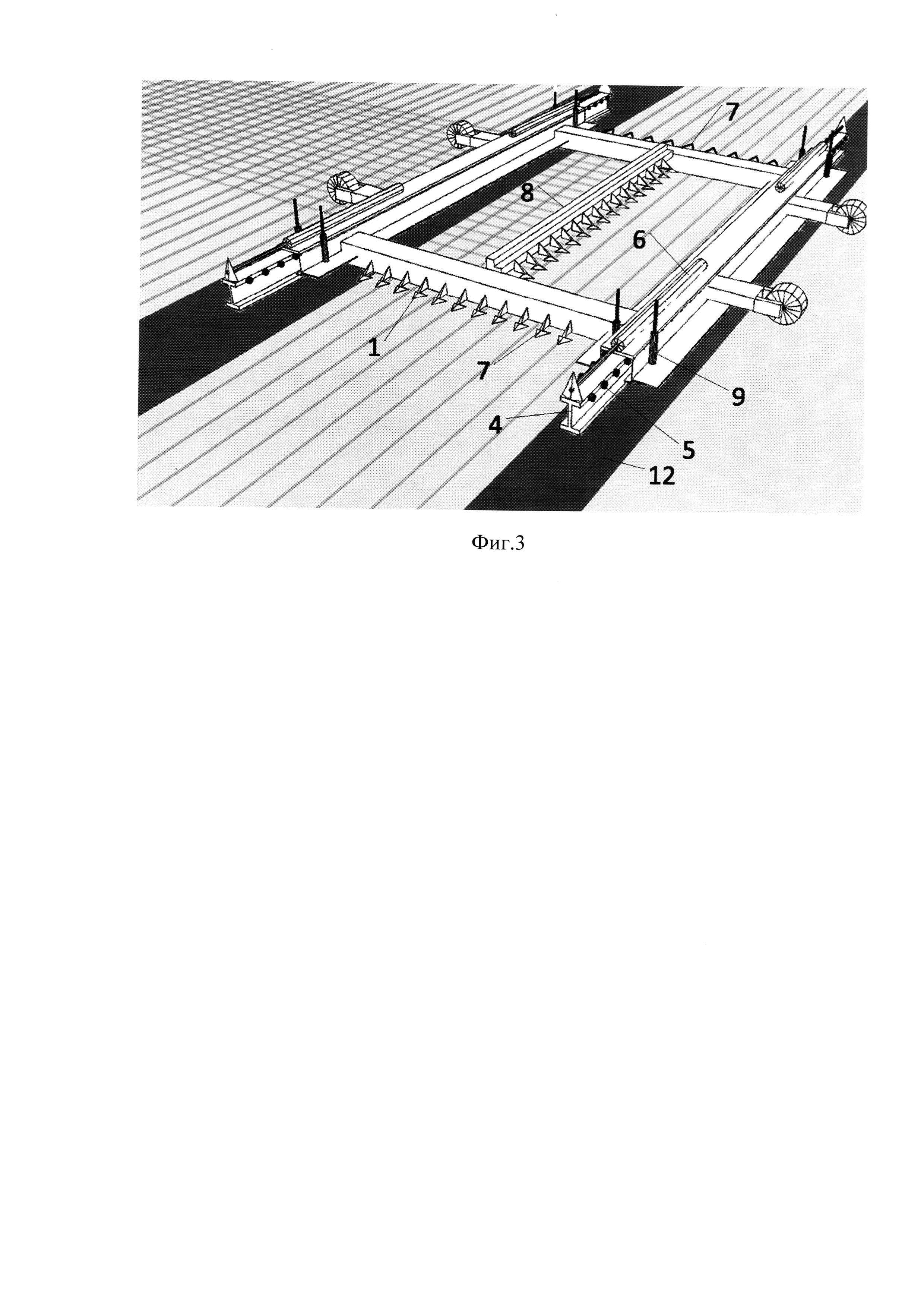
На фиг. 2 и фиг. 3 предоставлено устройство мостовой платформы, схема перемещения и принципы выполнения квадратно-гнездовой технологии возделывания сельскохозяйственных культур.
Фиг. 2 мостовой платформы 1 представляет собой конструкцию из металлических тавров шириной и длиной 10-15 м, боковые тавры 2 полые, в них размещаются и передвигаются по порожкам 3 боковых тавров опорные рельс-движители 4 с помощью роликов 5 и горизонтальных гидроцилиндров 6. Рабочие органы 7, расположенные по обеим бокам платформы осуществляют выполнение первой части технологического процесса - подготовительную основную обработку почвы (нарезку гряд и др.). Перемещение платформы вдоль делянки осуществляется с помощью гидроцилиндров 6. Двустороннее размещение рабочих органов 7 предусматривает обработку поля при переходе платформы на следующую клетку с осуществлением обратного движения. Поперечная обработка и формирование квадратно расположенных гнезд осуществляется рабочими органами, смонтированными на подвижном технологическом модуле 8. Подъем платформы для перемещения балок-движителей на новую позицию осуществляется во время остановки платформы с помощью гидроцилиндров 9 и опорных пластин 10. Перемещение платформы по дороге на следующую клетку поля осуществляется с помощью колес-движителей 11, постоянной колеей 12 служит дернина многолетних трав.
Схема перемещения и продольной обработки почвы предоставлены на фиг. 3. Процесс осуществляется следующим образом: гидроцилиндры 9 расслабляются и вся платформа 1 ложится на ролики 5 рельс-движителей 4, которые под весом платформы укладываются на дерновую дорожку 12, платформа с помощью горизонтальных гидроцилиндров 6 по рельс-движителям 4 перемещается на всю длину балок, выполняя при этом рабочими органами 7 первую часть квадратно-гнездовой технологии (основную обработку почвы, нарезку продольных гряд и др.). При выходе на следующую клетку эта операция выполняется рабочими органами, расположенными на обратной стороне платформы. При выходе платформы на конец балки-движителей 4 технологический модуль 8 передвигаясь по поперечным балкам выполняет вторую часть квадратно-гнездовой технологии, размещая гнезда семян в почву по схеме заложенной в компьютерной программе с одновременным внесением удобрений и других предусмотренных препаратов. После завершения работы процесс повторяется по схеме фиг. 2.
Техника перехода комплекса на очередное поле выполняется по принципу, изложенному в патенте RU №2694974 (8) следующим образом.
Платформа при выходе на дорогу, ограничивающую поле, с помощью колес-движетелей 11 (фиг. 3) перемещается до следующего участка поля. Далее гидроцилиндры 9 приподнимают всю конструкцию платформы, балки-движетели 4 проталкиваются на колеи следующей делянки, вертикальные гидроцилиндры расслабляются, платформа опускается на рельсы 5 балок-движетелей, технологический процесс повторяется.
Обработка посевов выполняется так же в двух направлениях, что обеспечивает отдельные растения (или гнезда из группы растений) комфортными условиями вегетации (оптимальные режимы освещения, обеспечения влагой и другими факторами жизни, воздушный режим) и эффективной борьбой с сорняками. Таким образом, робототехнический прецизионный мостовой земледельческий комплекс включает массив, поделенный на земельные участки шириной порядка 15 м, по краям которых располагаются полосы шириной около 3 м, засеянные многолетними травами (кострец безостый, овсяница красная), отличающимися образованием плотной дернины с несущей способностью до 22 кг/см2, служащей постоянной колеей по которой перемещается земледельческая платформа путем пошагового выдвижения рельс-движителей. Робот-комплекс способен обрабатывать почву в двух направлениях с квадратно-гнездовым размещением растений, обеспечивающим значительную прибавку урожая по сравнению с классическими технологиями. Мостовое устройство с жесткофиксированной постоянной колеей обеспечивает возможность внедрения робототехнических принципов перемещения, работы технологического модуля в заданной компьютерной программой режиме, обеспечивая строго нормированные требования научно-обоснованных технологией земледелия. Мостовое устройство обеспечивает высокую экологичность использования почвенного покрова как жизнеобеспечивающей среды растений и почвенной биоты за счет использования постоянной колеи, радикально снижаются воздействия земледельческих энергетических и технологических механизмов на уплотнение и структуру почвы, обеспечивая сохранение и повышение плодородия. При средней рабочей скорости 5 км/час как у современных сельскохозяйственных машин, суточная производительность комплекса составляет порядка 50 га, что в условиях Приморья и Приамурья на Дальнем Востоке при возделывании сельскохозяйственных культур в севообороте зерновые, соя, картофель, овощи, кормовые 1 платформа способна обеспечить возделывание этих культур на площади 2,5 тыс.га.
Список использованных источников
1. Скуратович, А. Не давите мужики! Не давите / А. Скуратович // Триз-профи: Эффективные решения. - 2006. - №2.
2. Жуков, Ю.Н. Автоматизированный мостовой агротехнический комплекс - АМАК. «Сеятели и хранители». Книга 2 / Ю.Н. Жуков. - М.: Современник, 1992.
3. В чем главный недостаток Струнного Транспорта Юницкого? http://www.membrana.ru/particle/2486
4. Зайцев, С.Д. Энергосредство на шинах сверхнизкого давления / С.Д. зайцев, В.И. Прядкин, Л.С. Стребличенко // Тракторы и сельскохозяйственные машины. - 2006. - №10.
5. Пневмотрак гусеницы транспортного средства. Авторское свидетельство СССР №965869, http://patentdb.su/3-965869-pnevmotrak-gusenicy-transportnogo-sredstva.html
6. Tramline Farming Systems. Technical manual. Department of Agriculture Western Australia, GRDC project DAW 718. Bulletin 4607. Feb. 2004.
7. Чернышев H.И. Автоматизированная агротехническая самодвижущаяся платформа (ААСП) Патент на изобретение №№2636472 от 23.11.2017 / Чернышев Н.И., Сысоев О.Е., Есипов М.С. // Заявка 2016149701 Приоритет от 16.12.2016 (РОСПАТЕНТ) - 35 с.
8. Чернышев Н.И., Мостовой робот-комплекс точного земледелия Патент на изобретение №2694974 от 26.06.2019/ Чернышев Н.И., Сысоев О.Е., Есипов М.С. // Заявка 2018123250 Приоритет от 18.07.2019 (РОСПАТЕНТ) - 35 с.
9. Карпенко А.Н., Кречетков М.В., Посев пропашных культур квадратно-гнездовым способом, «Достижения науки и передового опыта в сельском хозяйстве», 1951, №2.
10. Беликов В., Квадратно-гнездовая посадка обощных и ягодных культур, М., 1952.
11. Попов А.Ю., Воропаев Д.А.
12. Значение трав в улучшении эксплуатационных качеств автомобильных дорог https://sdelaemsami.ru/landdiz04.html Чернышев Н.И., Есипов М.С., Некраев Ш.Х.
13. Использование дернины как экологически чистую поверхность при дорожном строительстве. Сб. Архитектура, строительство, землеустройство и кадастры на Дальнем Востоке в XXI веке: материалы Междунар. науч.-практ.конф., Комсомольск-на-Амуре, 24-26 апреля 2018 года. / редкол.: О.Е. Сысоев (отв. ред.) [и др.]. - Комсомольск-на-Амуре: ФГБОУ ВО «КнАГУ», 2018. - 288 с.
14. Шаин С.С. Укрепление откосов железнодорожного земляного полотна травосеянием ВНИИ транспортного строительства 1956 вып.18
15. http://www.tehlit.ru/llib_nonma_doc/52/52597/index.htm Автомобильные дороги и мосты. Биологические методы укрепления откосов и рекультивация земель, нарушаемых при строительстве автомобильных дорог. Обзорная информация. Выпуск 5. Москва 2007.
Реферат
Изобретение относится к области сельскохозяйственного производства. Мостовой прецизионный роботизированный комплекс точного земледелия включает три блока: первый - полигон в виде участка севооборота с полем многолетних трав и колеей для перемещения комплекса, второй блок представлен самодвижущейся платформой с системой перемещения и энергетическим оборудованием и третий блок - в виде автоматизированного технологического модуля, выполняющего заданные операции. Колеи выполнены в виде посевов многолетних трав, образующих прочную на разрыв с высокой несущей способностью дернину. По колеям осуществляется пошаговое перемещение с помощью выдвигающихся рельс-движителей мостовой платформы, на которой смонтированы рабочие органы, выполненные с возможностью осуществления технологических операций в двух направлениях и обеспечивающие квадратно-гнездовое размещение культур в робототехническом режиме по компьютерной программе. Техническим результатом является повышение проходимости за счет жесткости опоры, возможность нормированного обеспечения элементами жизнеобеспечения растений, снижение негативных воздействий используемых в земледелии механизмов на почвенное плодородие, а также повышение производительности труда. 1 з.п. ф-лы, 3 ил.
Формула
Документы, цитированные в отчёте о поиске
Мостовой робот-комплекс точного земледелия
Комментарии