Мостовой робот-комплекс точного земледелия - RU2694974C1
Код документа: RU2694974C1
Чертежи
Описание
Изобретение относится к области точного земледелия (полеводство, картофелеводство, овощеводство, рисосеяние, кормопроизводство) и предназначено для обеспечения комплекса агротехнических мероприятий при возделывании сельскохозяйственных культур в автоматизированном режиме на уровне отдельно взятого растения при значительном снижении материалоемкости и энергозатрат производства, на высоком экологическом уровне.
Аналогами предполагаемого комплекса является ряд устройств и механизмов, применяемых для повышения производительности труда, создания условий для автоматизации технологических процессов, повышения проходимости со снижением разрушительных воздействий механизмов на структуру, водно-воздушные и биологические свойства почв.
К ряду таких механизмов и систем относятся широкозахватные агрегаты на базе тракторов, оборудованных для повышения проходимости и снижения разрушающего воздействия на почву: гусеничные на пневмотраках (1), колесные со спаренными колесами (2) и колесами с низким давлением (3).
При всем этом их проходимость ограничена и в значительной степени зависит от состояния почв, почвы при этом подвергаются негативному воздействию.
К следующему ряду по решению проблем проходимости систем и снижения негативного воздействия на почву можно отнести различного рода мостовые устройства на железнодорожных рельсах (4), на тросовых подвесках (5) и др. (6, 7, 8) агрегатов.
К наиболее приближенным к заявленному изобретению по степени снижения воздействия на почву как опору агрегатов, принципу работы, качеству выполнения технологических приемов можно отнести следующие две мостовые системы - первая это агротехнический комплекс АМАК (4) основой для перемещения которого являются рельсы, другой вариант это мостовая система, передвигающаяся по бетонным столбам (9). К недостаткам этих двух систем следует отнести очень высокую металлоемкость первой - 17,5 т/га и ее значительную материалоемкость на обустройство путей передвижения (шпалы, крепеж рельсов и пр.), у другой системы ненадежность устойчивости бетонных столбов-опор, особенно в зонах с глубоким промерзанием почво-грунтов, высокая стоимость, сложность монтажа, затратность поддержания их в рабочем состоянии.
В значительной мере недостатки в части материалоемкости, стоимости оборудования полигона решены в варианте автоматизированной агротехнической самодвижущейся платформы (ААСП) (10). Основным ее отличием и преимуществом от последних из рассматриваемых выше двух вариантов является более простое и надежное оборудование полигона в виде гравийных подушек и расположенных на их бетонированных площадок, на которые опирается система при выполнении технологического процесса и по которым система перемещается на следующую позицию. Существенным недостатком при этом является относительно материалоемкое оборудование опор в виде бетонированных площадок (6 м3/га бетона) так же сложность фиксации системы на опорных площадках.
Задачей настоящего изобретения является создание мостового робот-комплекса точного земледелия (МРКТЗ) для мелиорируемых земель, который, сохраняя все технологические достоинства комплексов АМАК и ААСП, располагает более надежной и менее материалоемкой высокоэкологичной системой передвижения агрегата по полю, используя при этом систему закрытого дренажа.
Для выполнения поставленных задач предполагается ряд технических решений по совершенствованию известных агротехнических мостовых систем и земельных участков предназначенных для их работы.
Комплекс МРКТ3 состоит из 3 блоков: специально оборудованного мелиорированного участка, где система закрытого дренажа выполняет две функции - как система двойного регулирования водного режима и дорожная сеть для продольного перемещения мостовой системы, поперечные перемещения (переход на следующую обрабатываемую клетку поля) осуществляется по межпольной дороге, одновременно служащей для транспортировки необходимых материалов (семена, удобрения и др.), а так же для вывозки урожая. Второй блок - это несущая мост-рама, осуществляющая перемещение комплекса по полю, а так же являющаяся основой для монтажа на ней третьего блока, состоящего из энергетических и технологических модулей, емкостей для материалов и урожая, пульта управления.
Реализация перемещений, технологических процессов, обеспечение энергией - выполняются в робото-техническом режиме.
Принцип действия и результат работы МРКТ3 в разрезе блоков представляется следующим образом: комплекс предназначен для работы на мелиорированных землях с двойным регулированием водного режима за счет дренажной системы. При этом дрены расположены вдоль обрабатываемой клетки поля через 30 м, что обуславливает их устойчивое функционирование. Дрены оборудуются из гравийно-галичного материала, ширина их порядка 50 см, глубина от поверхности поля в пределах норм для видов культур (70-100 см). Такая конструкция дрен дает возможность использовать их как опорные дорожки для продольного перемещения комплекса.
Следующий блок комплекса это мост-рама, выполненная из металлических конструкций, шириной примерно 30 м (на ширину расположения дрен-дорожек), длиной -10 м. Продольные 10-ти метровые полые балки служат механизмом для осуществления пошагового перемещения системы по дорожкам-дренам с помощью направляющих рельсов-балок, размещенных внутри полых балок, по которым перемещается на очередной участок поля мост-рама. Для разгрузки и перемещения рельс-балок на поперечных 30-ти метровых балках мост-рамы устроены подъемные механизмы, опираясь на которые мост-рама приподнимается, разгружая и создавая условия для перемещения рельс-балок. Площадь их опоры при этом составляет порядка 20-30 м2, что обуславливает незначительную (порядка 0,1-0,2 кг/см2) нагрузку на почвенный покров.
Третий блок комплекса представлен энергетическим и технологическим механизмами. Сравнительно незначительные одномоментные нагрузки, обусловленные раздельными технологическими процессами (обработка почвы, посадка и др.) и процессом перемещения по жесткой колее не обремененным затратами на преодоление вязкости почвы дают возможность снизить энергозатраты до 70%.
При условии значительной площади мост-рамы (300-500 м2) над агрегатом имеется возможность монтировать солнечные батареи за счет энергии которых можно обеспечивать работу комплекса. При работе в ночных условиях, при длительных периодах пасмурной погоды на комплексе устанавливаются емкие батареи для подзарядки которых предусматривается специальные трансформаторы от внешних энергосистем.
Технологическая часть представлена блоком систем почвообрабатывающих, посевных и других машин, перемещающихся по длинным поперечным балкам для выполнения заданных агроприемов. Жесткая основа этих систем позволяет им работать в заданном электронной программой режиме (по принципу роботехники), выполняя нормы и требования технологии точного земледелия в энерго-экономном режиме.
Техническим результатом заявленного изобретения является: обеспечение точного земледелия с использованием базы данных по обеспеченности факторами жизнедеятельности растений с учетом пестроты почвенного плодородия земельных участков и состояния растений в период вегетации, возможности нормированного обеспечения растений в лимитирующих факторах; снижение энергозатрат за счет оптимизации технологических процессов, снижение затрат на перемещение за счет жесткости опорных систем при перемещении комплекса по полю и перемещения технологического модуля при выполнении заданных агротехнических параметров; снижение материалоемкости и затрат на обустройство земельного участка; снижения антропогенного воздействия на почвенный покров, сохранение плодородия почв.
К основным признакам аналога автоматизированной агротехнической самодвижущейся платформы (ААСП) относятся следующие - это мостовая система на которой смонтированы технологический модуль, который выполняет заданный комплекс агротехнических операций в автоматизированном режиме, точность выполнения обуславливается жесткостью конструкции, перемещение которой в технологическом процессе осуществляется по рельсовым направляющим, смонтированными на длиных поперечных балках мостовой системы. ААС - платформа перемещается по полю с помощью рельс-балок по жестким точечным гравийным подушкам на которых лежат бетонные площадки.
Отличительные признаки предлагаемого изобретения МРКТ3. Для достижения технического результата в предлагаемом изобретении к основным признакам аналога ААСП, обеспечивающего требования точного земледелия вносятся существенные совершенствования следующего порядка: в целях создания надежной незатратной дорожки для перемещения системы по полю земельный участок, предназначенный для работы комплекса МРКТ3 должен быть мелиоративно обустроен системой закрытого дренажа, которая несет дополнительную функцию в виде жесткой колеи для продольного перемещения комплекса. Дренажная колея выполняется из галичного (гравийного) субстрата: ее ширина - 0,5 и глубина до 1 метра. Ширина участка поля между дренами 30 м. В зависимости от типа и физических свойств почв, при условии работы на тяжелых по физическим свойствам почвах с ограниченно водопропускной способностью между дренажными колеями предусматриваются 1-2 обычные (типовые) дрены. Для торфяно-болотных и легких супесчаных почв, необходимость в дополнительных промежуточных дренах отпадает, т.к. ширина между дренаж-колеями (30 м) находится в пределах расстояния, предусмотренного мелиоративными нормами.
Таким образом опора в виде сплошной гравийной колеи в отличии от точечных гравийных подушек и размещенных на них бетонных опорах обеспечивает более устойчивое выполнение операций по перемещению комплекса, при этом значительно снижается материалоемкость и стоимость монтажа по сравнению с аналогом.
Как и в аналоге, процесс перемещения продольных рельс-балок для пошагового перемещения платформы на последующий участок обработки осуществляется при условии их разгрузки за счет поднятия платформы гидросистемами. Но для более надежного и устойчивого выполнения этой операции в предлагаемом варианте изобретения предусмотрен монтаж подъемного механизма в виде опорных пластин по всей длине поперечных 30-метровых балок, которые, опираясь с помощью гидроцилиндров на почву междурядий, приподнимают платформу, разгружая при этом рельс-балки. Площадь опоры при этом составляет порядка 30 м2, что обеспечивает несущественное давление на почву (менее 0,1 кг/см2).
В отличие от храповых механизмов в аналоге, рельс-балки перемещаются с помощью продольных гидроцилиндров, что упрощает и делает более надежной технологию этой операции. Для перемещения комплекса по межпольной дороге на следующее поле (клетку) предусмотрен упрощенный вариант в виде колесных движений.
Схема устройства и принцип работы представлены на фигурах 1-5.
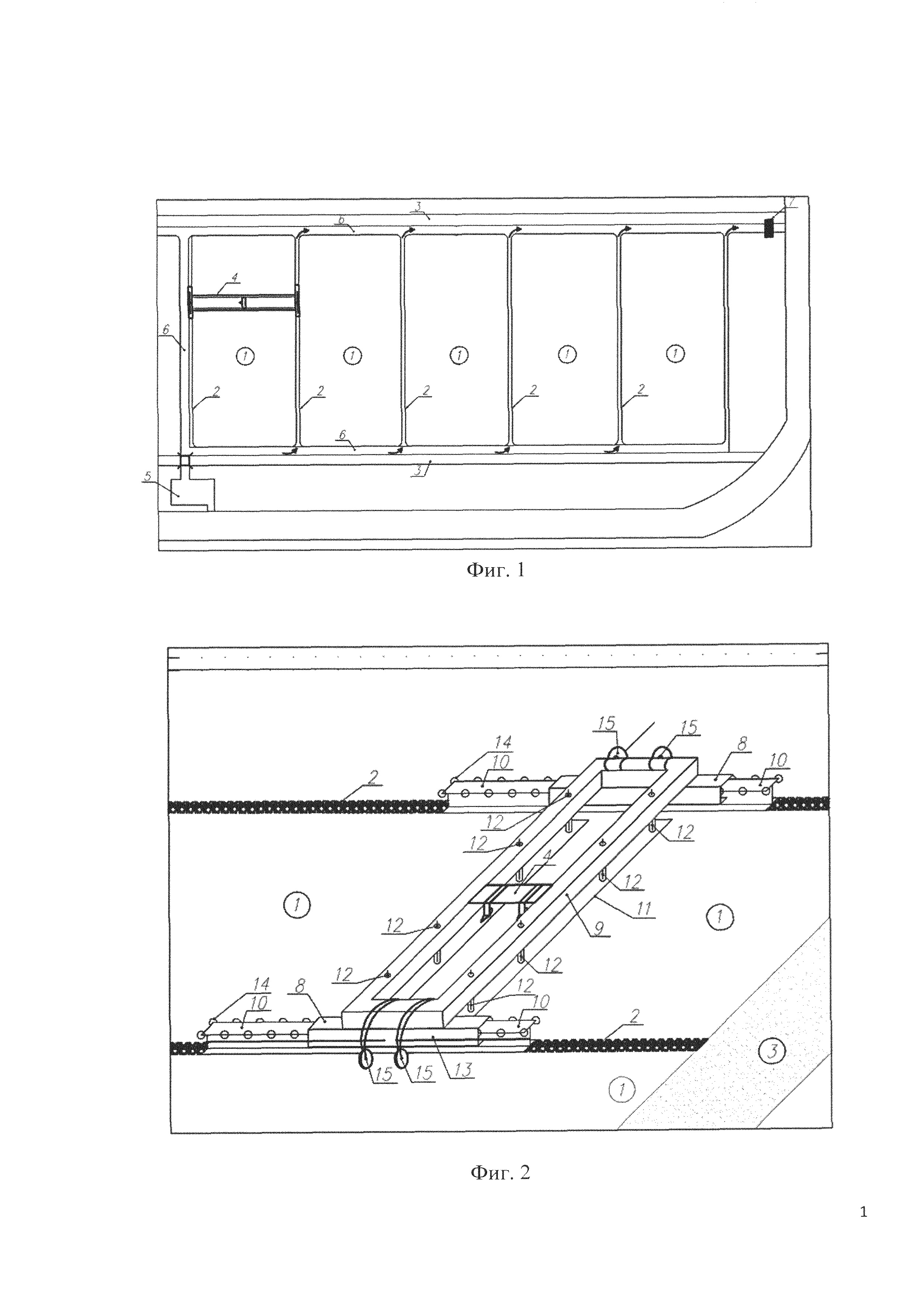
На фигуре 1 изображена схема устройства и оборудование полигона, где 1 - клетка (делянка); 2 - галично-гравийные дрены; 3 - дорога (разворотная полоса); 4 - технологический модуль; 5 - водозабор; 6 - сеть открытых каналов; 7 - регулирующие шлюзы.
Полигон представляет собой мелиоративно оборудованный участок, состоящий из клеток (делянок) 1, шириной примерно 30 м, длиной - в зависимости от размера поля, и ограниченный дорогой (разворотной полосой) 3 для обеспечения необходимыми материалами и транспортировкой урожая, по которой так же происходит перемещение технологического комплекса на очередную клетку. Водный режим земельных участков регулируется при ее недостатке путем подачи воды из водозабора 5 по сети открытых каналов 6 и сети закрытых галично-гравийных дрен 2 при закрытых регулирующих шлюзах 7. При необходимости сброса излишней влаги система работает за счет дренажа при условии открытых шлюзов 7 и перекрытого водозабора 5. При необходимости устойчивого регулирования водного режима в случае тяжелых глинистых почв между дренами-колеями закладывается обычный закрытый дренаж. Гравийно-галичные дрены выполняют роль жесткой колеи, по которой перемещается, выполняя технические операции, мостовой комплекс. Поперечные междурядья, на почву которых опирается система, относительно уплотненные, способствуют более интенсивному сбросу излишних поверхностных вод в дрены.
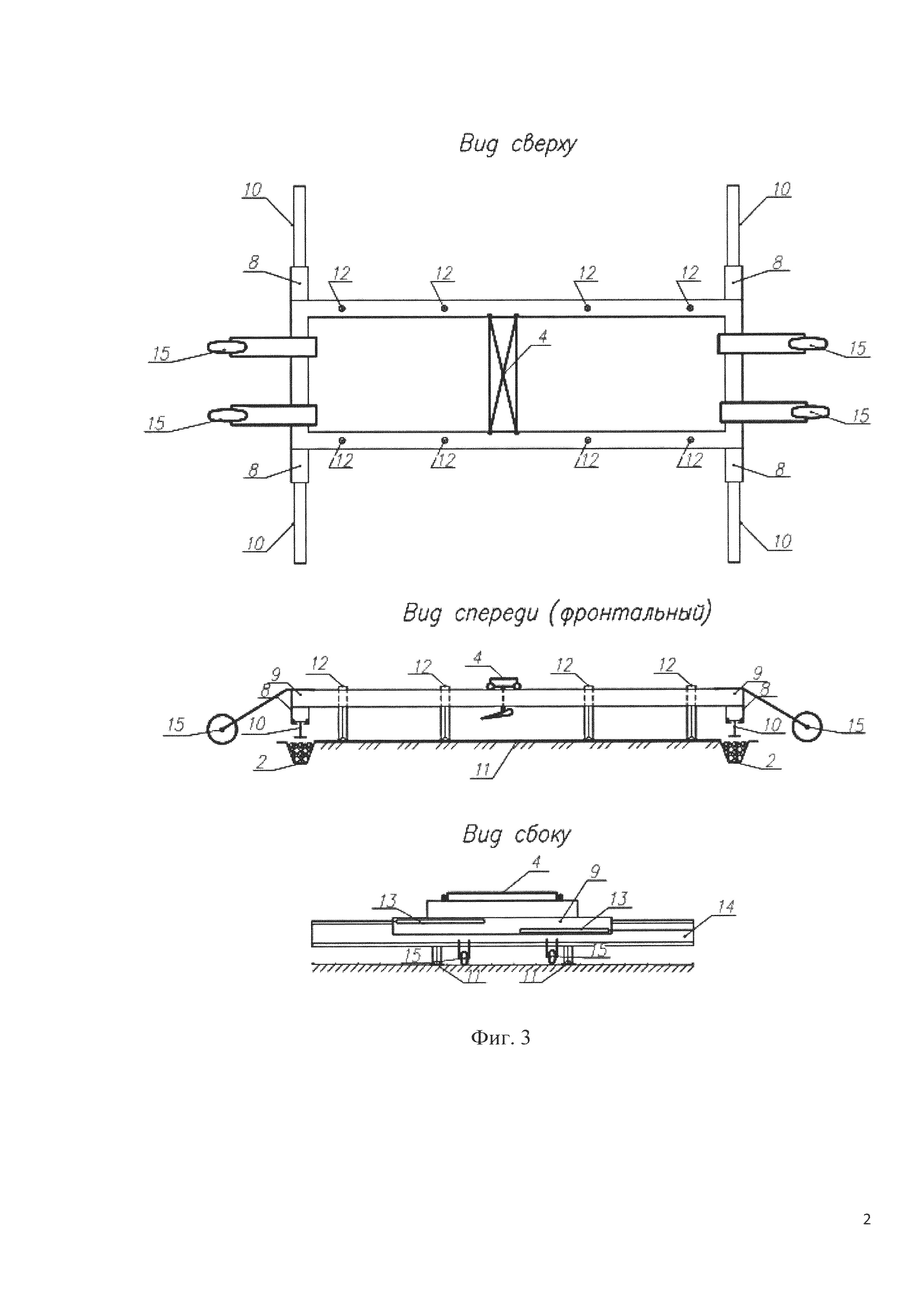
На фигуре 2 представлено принципиальное устройство мостового робот комплекса (МРКТ3), где 8 - короткие балки; 9 - длинные балки; 10 –балки-движители; 11 - опорные пластины; 12 - гидроцилиндры вертикальные; 13 - гидроцилиндры продольные; 14 - ролики балок-движителей, 15 -колесные пары.
Основой комплекса является рама заданного размера, размером примерно 10×30 м. Перемещение балок движителей 10 происходит в разгруженном состоянии за счет подъема системы гидроцилиндрами 12, которые при этом опираются на почву междурядий пластинами 11, смонтированными на длинных балках 9. На длинных балках смонтированы направляющие для перемещений технологического модуля 4 в процессе выполнения заданных операций. С помощью колесных пар 15 комплекс при выходе на межпольную дорогу 3 перемещается на следующее поле 1.
На фигуре 3 MP комплекс представлен в трех ракурсах: сверху, спереди и сбоку.
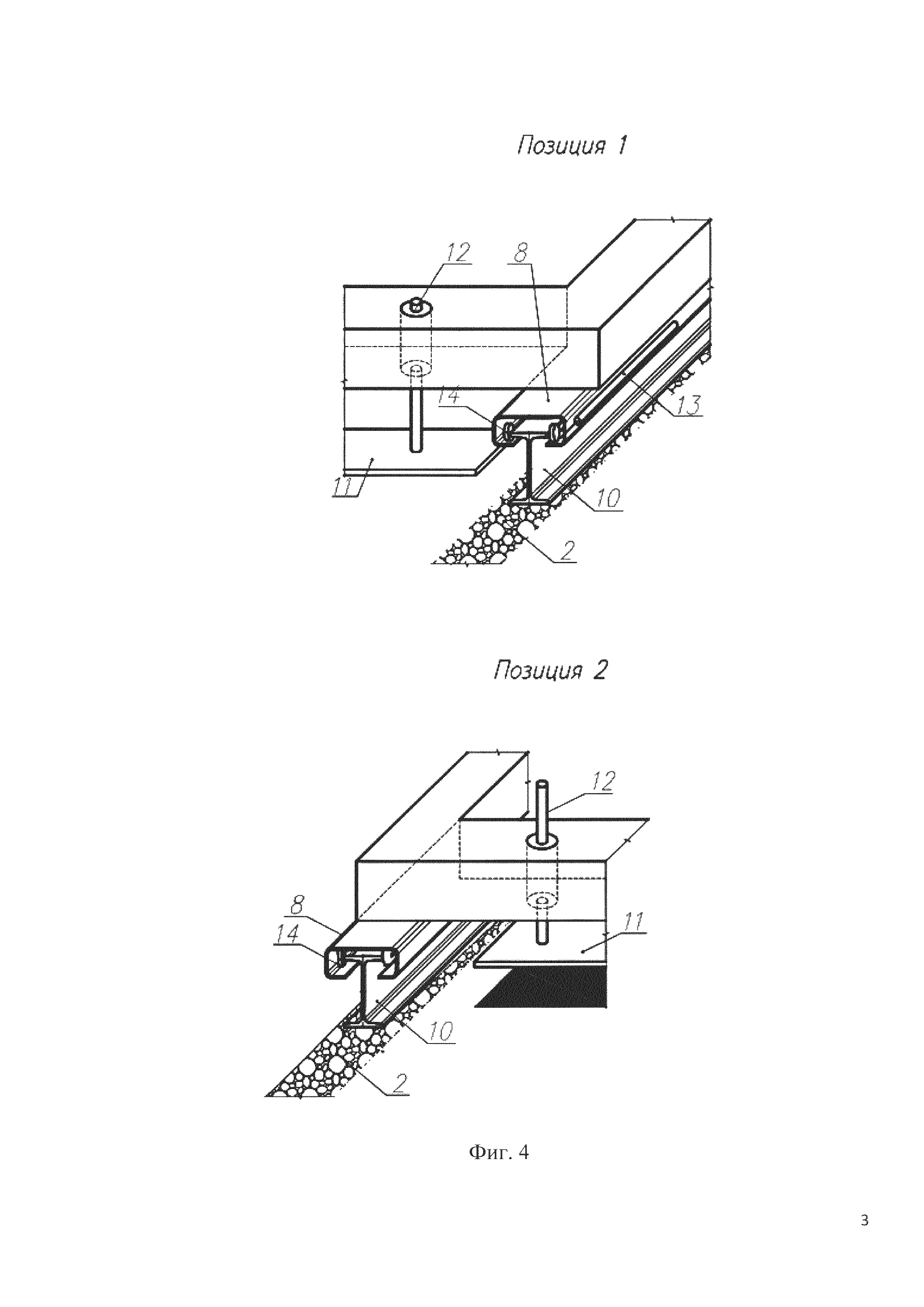
На фигуре 4 представлена принципиальная схема перемещения МРКТ3 по обрабатываемому участку поля.
В позиции 1 гидроцилиндры 12 с помощью пластин-опор 11, опираясь на почву междурядий, приподнимают всю систему, разгружая балки-движители 10, которые под своим весом ложатся роликами 14 на полочки продольной короткой балки 8 и далее продольным гидроцилиндром 13 перемещаются на последующую позицию 2, где гидроцилиндры 12 расслабляются и вся система ложится на ролики 14 балок движителей 10, которые в свою очередь укладываются на галично-гравийные колеи-дрены 2. С помощью продольных гидроцилиндров 13 комплекс перемещается на следующую позицию (участок делянки), который обрабатывается в заданном режиме технологическим модулем 4.
После завершения работы технологического модуля начинается новый цикл (позиция 1).
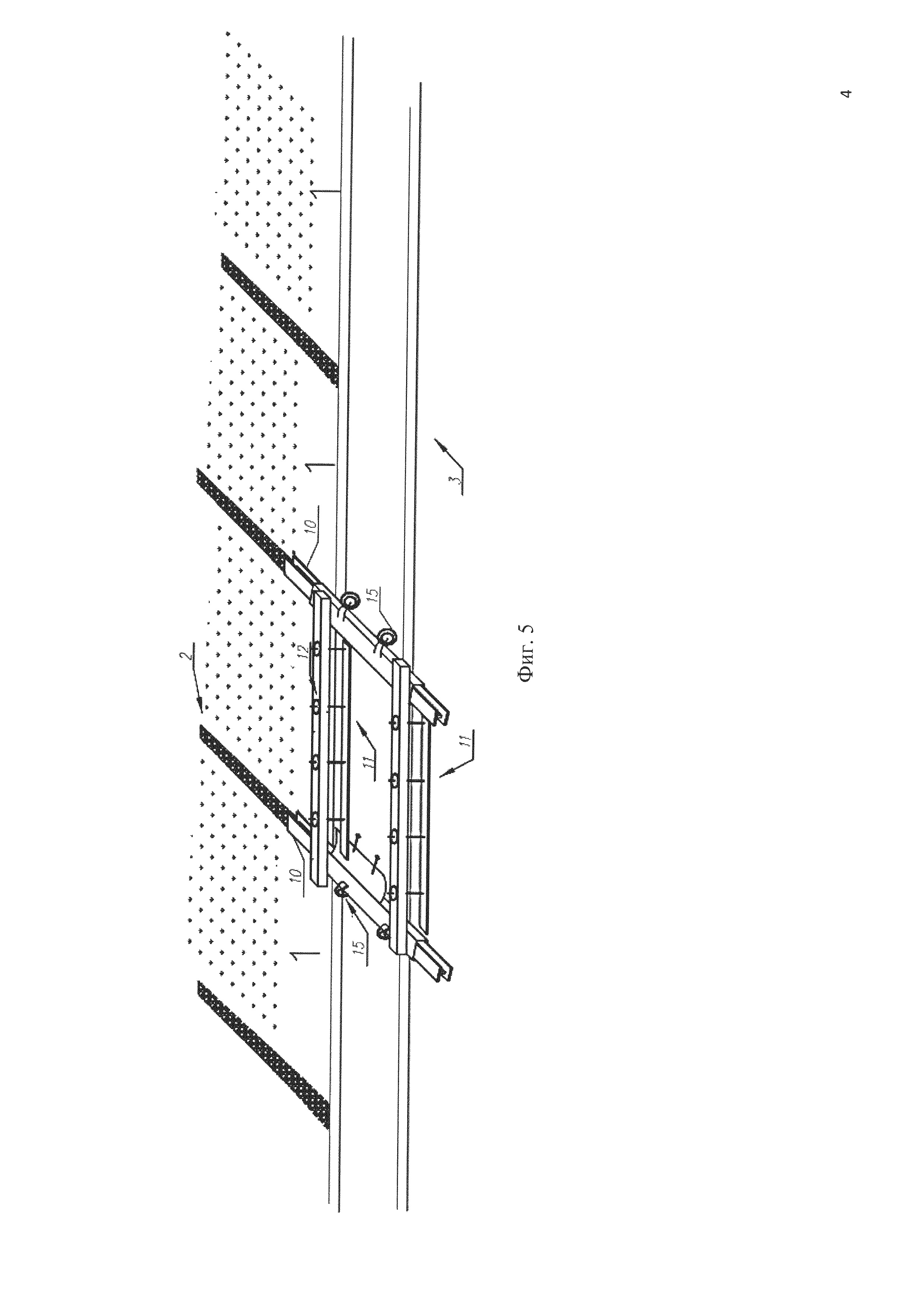
Техника перехода комплекса на очередное поле (клетку) представлена на фигуре 5. Комплекс, обработав очередное поле, выходит на межпольную дорогу 3. Для поперечного перемещения платформа поднимается по вышеописанному принципу, после этого приводятся в рабочее положение колесные движители 15 и комплекс перемещается в сторону новой делянки (клетки) поля. Для захода на новую делянку с помощью опорных пластин 11 система приподымается, колесные пары 15 складываются и балки-движители 10 выдвигаются на очередную делянку поля, платформа выдвигается на первую делянку поля, технологический модуль выполняет заданную работу, далее цикл повторяется.
Список использованных источников
1. Пневмотрак гусеницы транспортного средства. Авторское свидетельство СССР №965869, http://patentdb.su/3-965869-pnevmotrak-gusenicy-transportnogo-sredstva.html, 2017.
2. 4WD Tractor Wheels, http://www.woldinc.com/4wd-tractor.html]: John Deere 9R Series Tractors, http://www.deere.com/wps/dcom/en US/products/ equipment/tractors/four wheel drive tractors/9r 9rt series/9r 9rt series.page, 2017
3. Зайцев, С.Д. Энергосредство на шинах сверхнизкого давления / С.Д. Зайцев, В.И. Прядкин, Л.С. Стребличенко // Тракторы и сельскохозяйственные машины. - 2006. - №10.
4. Жуков Ю.Н. Автоматизированный мостовой агротехнический комплекс - АМАК. «Сеятели и хранители». Книга 2 / Ю.Н. Жуков. - М.: Современник, 1992.
5. В чем главный недостаток струнного транспорта Юницкого? http://www.membrana.ru/particle/2486, 2002.
6. Жалнин Э.В., Муфтеев Р.С. История развития и перспективы внедрения мостового растениеводства. Тракторы и с. -х. машины. 2002, №5. С 23-30.
7. Карапетян М.А. Повышение эффективности технологических процессов путем уменьшения уплотнения почв ходовыми системами сельскохозяйственных тракторов: дис. … док. тех. наук: 05.20.01 / Карапетян Мартик Аршалуйсович. - М., 2010. - 305 с.
8. Жалнин Э.В. История развития и перспективы внедрения мостового растениеводства / Э.В. Жалнин, Р.С. Муфтеев // Тракторы и с. -х. машины. - 2002.-№5. - С. 23-30.
9. Чернышев Н. И. Мостовая система как основа реализации точечного земледелия / Н.И. Чернышев, Е.О. Сысоев // Ученые записки. - Комсомольский-на-Амуре государственный технический университет.- 2011.-№1-1 (5). С. 113-118.
10. Чернышев Н.И. Автоматизированная агротехническая самодвижущаяся платформа (ААСП) Патент на изобретение №№2636472 от 23.11.2017 / Чернышев Н.И., Сысоев О.Е., Есипов М.С. // Заявка 2016149701 Приоритет от 16.12.2016 (РОСПАТЕНТ) - 35 с.
Реферат
Изобретение относится к области сельскохозяйственного машиностроения. Мостовой робот-комплекс точного земледелия содержит раму с продольными балками, имеющими пошагово перемещаемые по жестким щебеночным дренам-колеям (2) балки-движители с продольными гидроцилиндрами, и с поперечными балками, относительно которых закреплены технологический модуль (4) с сельскохозяйственными машинами и опорные пластины с вертикальными гидроцилиндрами. Робот-комплекс выполнен автоматизированным для работы в запрограммированном режиме по заложенной компьютерной программе. Обеспечивается снижение энергозатрат, материалоемкости и антропогенного воздействия на почвенный покров. 5 ил.
Комментарии