Способ и устройство для управления мобильным операционным столом - RU2635791C2
Код документа: RU2635791C2
Чертежи


Описание
Изобретение относится к способу и устройству для управления мобильным операционным столом, который имеет опорную поверхность для пациента, колонну операционного стола и основание колонны операционного стола. Операционный стол, кроме того, имеет ролики и блок привода перемещения для перемещения операционного стола. Блок привода перемещения активируется путем приведения в действие элемента управления, ассоциированного с блоком привода перемещения.
При работе в больнице обычно используются три различных вида операционных столов, а именно стационарные операционные столы, перемещаемые операционные столы и мобильные операционные столы. Стационарные операционные столы имеют колонну операционного стола, стационарно скрепленную с полом операционного зала. Обычно стационарные операционные столы не имеют основания колонны операционного стола. Перемещаемые операционные столы имеют основание колонны операционного стола, соединенное с колонной операционного стола, которое не имеет роликов и средств транспортировки и по меньшей мере при операции стоит на полу операционного зала. Перемещаемые операционные столы могут с помощью транспортной тележки подниматься и перемещаться. Такая система, которая включает в себя перемещаемый операционный стол и транспортную тележку, также называют мобильной системой операционного стола.
Основания колонн операционного стола мобильных операционных столов имеют ролики для перемещения операционного стола. Мобильные операционные столы, таким образом, могут перемещаться без дополнительных вспомогательных средств. В мобильных операционных столах, ролики могут регулироваться так, что операционный стол во время операции не может перемещаться, и/или основание колонны может опускаться по отношению к роликам, так что операционный стол надежно стоит на полу во время операции.
У мобильных операционных столов, кроме того, известны электрические приводы перемещения с плавным пуском и функцией безопасного торможения, чтобы перемещать мобильный операционный стол с помощью электрического привода перемещения. Приведение в действие этого блока привода перемещения осуществляется посредством по меньшей мере одного элемента управления, в частности посредством проводного или беспроводного пульта дистанционного управления. В блоках привода перемещения с по меньшей мере двумя ступенями скорости может тогда осуществляться переключение ступеней скорости. Это предпочтительно особенно тогда, когда мобильный операционный стол был перемещен из операционного зала и дальше, например, по коридору операционного отделения должен перемещаться на большое расстояние. В самом операционном зале из-за обычно довольно ограниченного пространства и множества препятствий маневрирование является проблематичным, так что здесь предпочтительна низкая скорость привода перемещения. В длинных коридорах, как это обычно имеет место в операционном отделении больниц, однако, желательна более высокая скорость, чтобы обеспечивать бесперебойный рабочий процесс. В известных процессах переключения для изменения ступени скорости движение операционного стола должно кратковременно останавливаться и должна выполняться трудоемкая установка желательной более высокой ступени скорости через меню устройства управления или пульта дистанционного управления. Чтобы затем вновь установить пониженную ступень скорости, должна повторно выполняться процедура для установки ступени скорости в меню устройства управления. Тем самым изменение скорости в случае известных мобильных операционных столов является относительно трудоемким. Альтернативная возможность для изменения скорости могла бы состоять в том, что для ступеней скорости предусматривается, соответственно, отдельный элемент управления на устройстве управления, в частности, на пульте дистанционного управления. Однако из-за этого устройство управления становится довольно ненаглядным. Особенно тогда, когда устройство управления служит также для управления регулируемыми компонентами операционного стола во время операции, из соображений наглядности нецелесообразно предусматривать множество элементов управления для функций, которые не требуются для самой операции.
Из документа DE 19955116 A1 известен блок управления для управления приводами выполненной съемной с колонны операционного стола опорной поверхности с регулируемыми с помощью электродвигателей компонентами, состоящий из блока питания, контроллера и устройства управления. Устройство управления интегрировано в транспортировочную тележку для транспортировки опорной поверхности операционного стола.
Исходя из известного уровня техники, задачей настоящего изобретения является создание способа и устройства для управления мобильным операционным столом, с помощью которых возможна простая активация блока привода перемещения для перемещения операционного стола с различными скоростями привода.
Эта задача решается способом с признаками пункта 1 формулы изобретения и устройством с признаками независимого пункта формулы изобретения на устройство. Предпочтительные варианты осуществления изобретения приведены в зависимых пунктах формулы изобретения.
Посредством способа управления мобильным операционным столом с признаками пункта 1 формулы изобретения достигается то, что первая скорость привода активируется одинарным приведением в действие элемента управления и что вторая скорость привода активируется посредством двойного приведения в действие элемента управления.
При этом в качестве двойного приведения в действие рассматривается двойной клик, то есть двукратная активация элемента управления в течение предварительно установленной длительности времени между первым приведением в действие элемента управления и вторым приведением в действие элемента управления, или инверсный двойной клик, то есть однократная деактивация элемента управления для максимального предварительно установленного времени прерывания и/или двукратная деактивация элемента управления для соответственно максимального предварительно установленного времени прерывания в пределах предварительно установленной длительности времени между первой деактивацией элемента управления и второй деактивацией элемента управления.
Посредством двойного приведения в действие элемента управления, таким образом, возможно простое переключение скорости привода с первой скорости привода на вторую скорость привода в течение активации блока привода перемещения с первой скоростью привода, не требуя для этого промежуточной деактивации блока привода перемещения. Также переключение скорости привода возможно только с одним элементом управления. Таким образом, возможно простое и по меньшей мере после освоения интуитивное приведение в действие элемента управления для активации первой скорости привода и для активации второй скорости привода блока привода перемещения. При этом первая скорость привода предпочтительно меньше, чем вторая скорость привода. Тем самым первая скорость привода может использоваться для медленного перемещения операционного стола, в частности для точного позиционирования и/или для маневрирования операционного стола, а вторая скорость привода – для пересечения больших расстояний с высокой скоростью.
Предпочтительно, если скорость привода блока привода перемещения посредством двойного приведения в действие изменяется с первой скорости привода на вторую скорость привода. Тем самым возможно очень удобное переключение скорости привода, которое в минимальной степени влияет на рабочий процесс в операционном зале и в операционном отделении больницы.
В случае когда двойное приведение в действие осуществляется посредством прерывания приведения в действие первого элемента управления, для двойного приведения в действие, кроме того, необходимо, чтобы прерывание было меньше, чем предварительно установленный период времени прерывания. Период времени прерывания предпочтительно устанавливается на значение в диапазоне между 100 мс и 800 мс, в частности на значение в диапазоне между 200 мс и 500 мс. В частности, период времени прерывания может быть установлен на значение 300 мс. Тем самым возможно простое и удобное приведение в действие элемента управления для активации второй скорости привода.
При этом предпочтительно, если двойное приведение в действие принимается только тогда, когда прерывание длится более 30% от предварительно установленного периода времени прерывания или соответственно прерывания длятся более 30% от предварительно установленного периода времени прерывания. Таким образом, при предварительно установленном периоде времени прерывания, например, 300 мс, минимальный период времени прерывания для двойного приведения в действие составляет 90 мс. Таким образом, можно эффективным образом избегать неправильных действий управления, в частности, из-за вибрации элемента переключения элемента управления.
Кроме того, предпочтительно, если блок привода перемещения деактивируется тогда, когда первый элемент управления не приводится в действие в течение предварительно установленного периода времени прерывания. Тем самым гарантируется, что блок привода перемещения не остается далее активированным, когда элемент приведения в действие больше не приводится в действие, благодаря чему можно избежать угрозы для пациентов и повреждений операционного стола.
Кроме того, является предпочтительным, если при двойном приведении в действие первого элемента управления при активированной второй скорости привода блока привода перемещения снова активируется первая скорость привода блока привода перемещения. Таким образом, возможно простое переключение со второй скорости привода на первую скорость привода, без необходимости для этого останавливать блок привода перемещения.
В качестве альтернативы, при двойном приведении в действие первого элемента управления при активированной второй скорости привода может активироваться третья скорость привода. Третья скорость привода, в частности, больше второй скорости привода, так что за счет этого может выбираться еще более высокая скорость привода.
Особенно предпочтительным является, когда предусмотрен второй элемент управления, при приведении в действие которого осуществляется деблокирование блока привода перемещения для привода операционного стола. При одинарном приведении в действие первого элемента управления блок привода перемещения активируется с первой скоростью привода. При двойном приведении в действие первого элемента управления блок привода перемещения активируется с второй скоростью привода. При этом блок привода перемещения может быть активирован, только когда задействован второй элемент управления, причем блок привода перемещения деактивируется, когда второй элемент управления не задействован. За счет этого первый элемент управления должен приводится в действие посредством одинарного приведения в действие для активации первой скорости привода и посредством двойного клика для активации второй скорости привода, посредством чего для приведения в действие может использоваться не инверсный двойной клик, т.е. "нормальный" двойной клик, благодаря чему обеспечивается возможность еще более интуитивного управления, чем при инверсном двойном клике.
Кроме того, является предпочтительным, если при дальнейших двойных задействованиях первого элемента управления блок привода перемещения активируется, соответственно, с более высокой скоростью привода до тех пор, пока не будет достигнута максимальная скорость привода блока привода перемещения. В качестве альтернативы, при повторном двойном приведении в действие первого элемента управления блок привода перемещения при активированной второй скорости привода может активироваться вновь с первой скоростью привода.
Таким образом, простым способом может осуществляться простое переключение и выбор различных ступеней скоростей.
Особенно предпочтительно, если при или после деактивации блока привода перемещения дополнительно активируется блок торможения. Тем самым движение операционного стола может активно останавливаться, так что можно эффективно избежать угрозы для пациентов и повреждения операционного стола. С помощью блока торможения можно простым способом, альтернативно или дополнительно, эффективно препятствовать смещению операционного стола при неактивном блоке привода перемещения.
Второй аспект изобретения относится к устройству для управления мобильным операционным столом, который имеет опорную поверхность для пациента, колонну операционного стола и основание колонны операционного стола, причем операционный стол имеет ролики и блок привода перемещения для перемещения операционного стола. Устройство дополнительно содержит первый элемент управления, посредством приведения в действие которого блок управления устройства активирует блок привода перемещения. Блок управления активирует блок привода перемещения с первой скоростью привода посредством одинарного приведения в действие элемента управления. Кроме того, блок управления активирует блок привода перемещения с второй скоростью привода посредством двойного приведения в действие элемента управления. Таким образом, может осуществляться простая активация и/или изменение скорости привода узла перемещения операционного стола.
Соответствующее изобретению устройство может быть усовершенствовано с использованием признаков зависимых пунктов формулы изобретения, причем указанные этапы способа выполняются посредством блока управления в соединении с элементами управления и блоком привода перемещения.
В изобретении первый и/или второй элемент управления обеспечиваются посредством пульта дистанционного управления, в частности проводного или беспроводного пульта дистанционного управления операционного стола, или посредством размещенных непосредственно на операционном столе элементов управления.
Кроме того, предпочтительно, когда скорости изменяются с неподвижного состояния на первую скорость привода, с первой скорости привода на вторую скорость привода, со второй скорости привода на более высокую третью скорость привода, с третей скорости привода на вторую скорость привода, со второй скорости привода на первую скорость привода и/или с первой скорости привода на неподвижное состояние через так называемые линейные ускорения, то есть с равномерным положительным или отрицательным ускорением. Тем самым предотвращаются ускорения рывками и осуществляется так называемый плавный пуск.
Дополнительные признаки и преимущества изобретения станут очевидными из нижеследующего описания, которое поясняет изобретение более подробно на примерах выполнения со ссылкой на прилагаемые чертежи, на которых показано следующее:
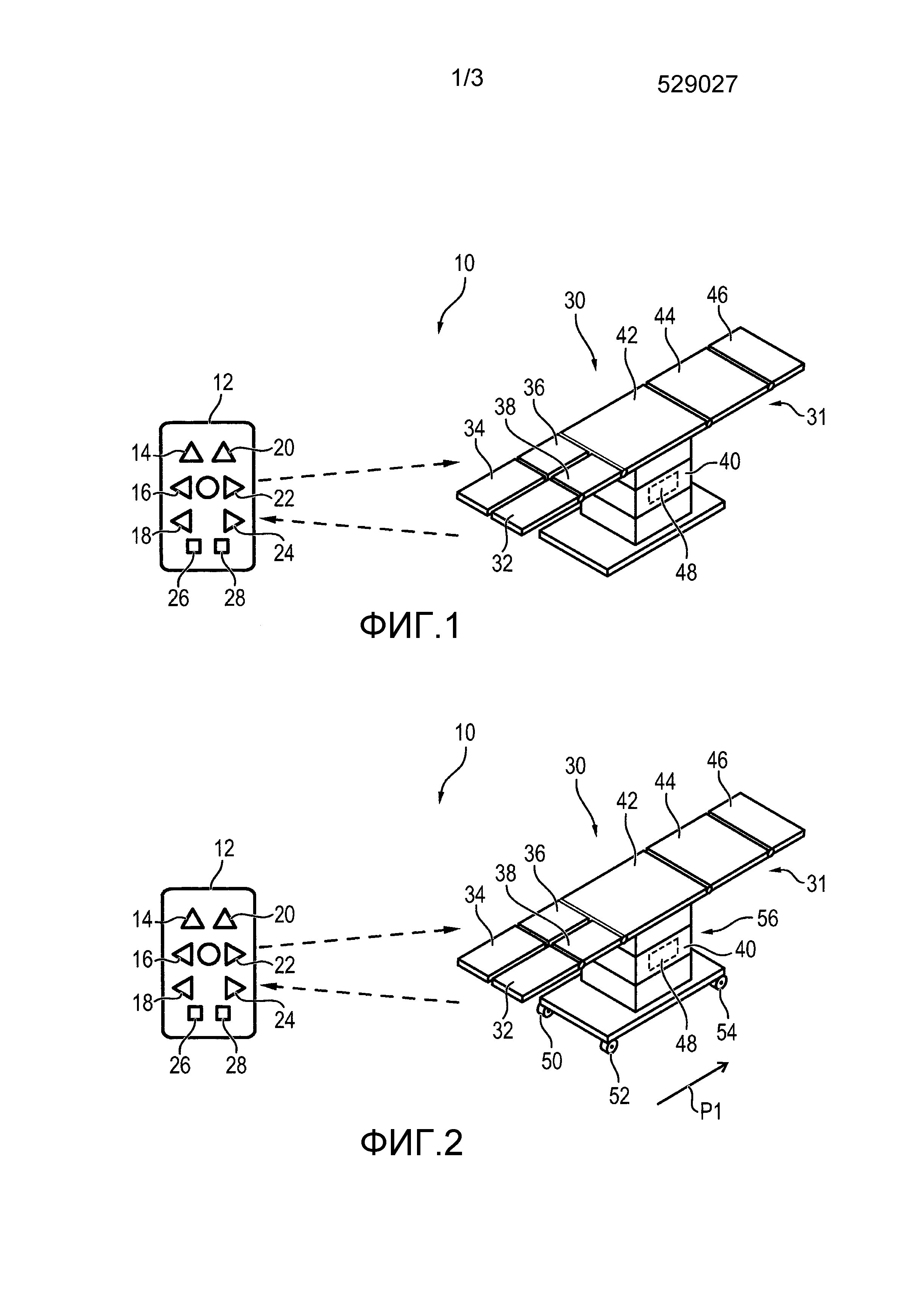
Фиг. 1 - мобильный операционный стол с несколькими компонентами, регулируемыми с помощью беспроводного пульта дистанционного управления, а также блоком привода перемещения, активируемым посредством беспроводного пульта дистанционного управления с двумя ступенями скоростей для перемещения операционного стола, причем операционный стол изображен в первом опущенном положении;
Фиг. 2 - операционный стол по фиг. 1 во втором поднятом положении для перемещения операционного стола;
Фиг. 3 – диаграмма состояний цикла опроса элемента управления для активации блока привода перемещения операционного стола с первой скоростью привода и для переключения ступени скорости блока привода перемещения от первой скорости привода на вторую скорость привода; и
Фиг. 4 – другой вариант выполнения пульта дистанционного управления для управления операционным столом.
Фиг. 1 показывает устройство 10 с пультом 12 дистанционного управления, который имеет множество элементов 14-28 управления, с помощью которых могут регулироваться регулируемые компоненты 32-46 мобильного операционного стола 30, т.е. изменяться по их положению в пространстве и/или относительно других компонентов 32-46. Отдельные компоненты 32-46 или группы этих компонентов 32-46 ассоциированы с элементами 14-24 управления пульта 12 дистанционного управления, так что при приведении в действие элемента 14-24 управления выполняется соответствующее действие регулирования ассоциированного с этим элементом 14–24 управления компонента 32-46 или группы компонентов. Мобильный операционный стол 30 имеет основание 41 колонны операционного стола, опорную поверхность 31 для пациента, которая включает в себя компоненты 32-36, 42-46, и колонну 40 операционного стола, расположенную между основанием 41 колонны операционного стола и опорной поверхностью 31 для пациента. Внутри колонны 40 операционного стола расположен блок 48 привода перемещения, который включает в себя блок управления для управления приводом перемещения мобильного операционного стола 30, электродвигатель для привода перемещения мобильного операционного стола 30 и аккумулятор для энергоснабжения блока управления и электродвигателя. В показанном на фиг. 1 опущенном состоянии мобильного операционного стола 30 ролики 50–56, предусмотренные для перемещения операционного стола 30, расположены внутри основания 41 операционного стола и не выступают вниз за опорные элементы, на которые в опущенном состоянии основание колонны операционного стола опирается на не показанный пол.
На фиг. 2 показано устройство 10 по фиг. 1, причем ролики 50-56 мобильного операционного стола 30 выдвинуты вниз, так что мобильный операционный стол 30 с помощью этих роликов 50–56 может сдвигаться. При этом ролики 50–56 с помощью электродвигателя и/или гидравлического блока с электрическим приводом или с ручным управлением могут приводиться из их убранного положения, показанного на фиг. 1, в выдвинутое положение, показанное на фиг. 2. Для выдвижения роликов 50-56 элемент 26 управления активируется однократно. При повторном приведении в действии элемента 26 управления операционный стол 30 снова опускается из поднятого положения, показанного на фиг. 2, в нижнее положение, показанное на фиг. 1. При однократной активации элемента 28 управления электродвигатель блока 48 привода перемещения активируется с первой скоростью привода, так что мобильный операционный стол 30 приводится с этой первой скоростью привода в направлении, указанном стрелкой P1. Привод может осуществляться посредством одного или нескольких роликов 50-56 или с помощью дополнительного не показанного приводного колеса или не показанного приводного валика.
Блок 48 привода перемещения или электродвигатель остается активированным с первой скоростью привода, пока задействован элемент 28 управления. Если приведение в действие управляющего элемента 28 прерывается дольше, чем предварительно установленный период времени прерывания, то блок 48 привода перемещения деактивируется, т.е. привод операционного стола 30 останавливается с помощью электродвигателя и активируется тормоз. Если, напротив, приведение в действие элемента 28 управления прерывается в течение времени, меньшего, чем период времени прерывания, а затем еще раз прерывается на период времени, меньший, чем период времени прерывания, то есть когда осуществляется двойное приведение в действие элемента 28 управления, активируется вторая скорость привода блока 48 привода перемещения. Предпочтительно, электродвигатель управляется таким образом, что он имеет соответственно более высокое число оборотов привода, чем при активации первой скорости привода.
На фиг. 3 представлена диаграмма состояний для активации и деактивации элемента 28 управления. После того как система была инициализирована на этапе S10, элемент 28 управления находится в состоянии S12 "отпущен", так что блок привода перемещения деактивирован. Если затем обнаруживается, что элемент 28 управления нажат, осуществляется изменение состояния в состояние S14 "нажат", в результате чего блок 48 привода перемещения активируется с первой скоростью привода. Если затем определяется, что элемент 28 управления больше не активирован, то есть что он отпущен, осуществляется изменение состояния с состояния S14 на состояние S16 "отпущен 1-й раз".
Если определено, что элемент 28 управления не задействуется в течение более чем 300 мс, то осуществляется изменение состояния из состояния S16 на состояние S12 "отпущен", в котором блок 48 привода перемещения деактивирован.
Если, однако, в течение 300 мс элемент 28 управления повторно активируется, то осуществляется изменение состояния из состояния S16 в состояние S18 "1-й клик". Если затем элемент 28 управления в течение 300 мс не деактивируется еще раз, то спустя 300 мс осуществляется изменение состояния с состояния S18 на состояние S14 "нажат".
Если, однако, в течение этих 300 мс осуществляется повторное отпускание элемента 28 управления, то осуществляется изменение состояния с состояния S18 на состояние S20 "отпущен 2-й раз". Если элемент 28 управления не активируется вновь в течение 300 мс, то осуществляется изменение состояния с состояния S20 на состояние S12 "отпущен", в котором блок 48 привода перемещения деактивируется. Если, однако, исходя из состояния S20, осуществляется повторное приведение в действие элемента 28 управления в течение 300 мс, то осуществляется изменение состояния с состояния S20 на состояние S22 "2-й клик", посредством чего активируется вторая скорость привода блока 48 привода перемещения. Если затем элемент 28 управления не приводится в действие, то осуществляется изменение состояния с состояния S22 на состояние S12 "отпущен", так что блок 48 привода перемещения деактивируется.
Фиг. 4 показывает пульт 62 дистанционного управления, который может быть использован в качестве альтернативы пульту 12 дистанционного управления. Пульт 62 дистанционного управления имеет дисплей 64 для отображения информации. Кроме того, пульт 62 дистанционного управления имеет множество элементов 66–112 управления, посредством которых могут удобным образом вводиться различные управляющие вводы для изменения положения компонентов 32-46 мобильного операционного стола 30. Кроме того, пульт 62 дистанционного управления имеет элемент 26 управления для выпуска транспортных роликов 50-56, а также элемент 28 управления для активации блока 48 привода перемещения по выбору при одинарном приведении в действие с первой скоростью привода и при двойном приведении в действие с второй скоростью привода.
СПИСОК ССЫЛОЧНЫХ ПОЗИЦИЙ
10 устройство
12, 62 пульт дистанционного управления
14-28, 66-112 элемент управления
30 операционный стол
31 опорная поверхность для пациента
40 колонна операционного стола
41 основание колонны операционного стола
32-46 компоненты операционного стола
48 блок привода перемещения
50-56 ролики
S10 – S22 состояния элемента управления
Реферат
Изобретение относится к способу и устройству для управления мобильным операционным столом и направлено на упрощение использования. Операционный стол имеет опорную поверхность для пациента, колонну операционного стола и основание колонны операционного стола, причем операционный стол имеет ролики и блок привода перемещения для перемещения операционного стола. В способе управления блок привода перемещения активируют путем приведения в действие первого элемента управления, ассоциированного с блоком привода перемещения, блок привода перемещения активируют с первой скоростью привода посредством одинарного приведения в действие первого элемента управления и блок привода перемещения активируют со второй скоростью привода посредством двойного приведения в действие первого элемента управления. 2 н. и 9 з.п. ф-лы, 4 ил.
Формула
Документы, цитированные в отчёте о поиске
Опорная система для пациента
Комментарии