Способ и устройство для управления ортезом или протезом коленного сустава - RU2508078C1
Код документа: RU2508078C1
Чертежи
Описание
Изобретение относится к способу управления ортезом или протезом сустава нижней конечности с создающим сопротивление приспособлением, которое снабжено по меньшей мере одним исполнительным механизмом, с помощью которого изменяется сопротивление сгибанию и/или разгибанию в зависимости от данных датчиков, причем во время использования сустава с помощью датчиков обеспечивается информация состояния. Способ и устройство можно применять наряду с применением в протезе коленного сустава, среди прочего, также в протезах тазобедренных суставов.
При использовании выкидных пружин в протезах тазобедренных суставов проблема состоит в том, что бедро при снятии нагрузки сгибается, что при нормальном цикле ходьбы является желательным в качестве облегчения сгибания, однако при ходьбе назад приводит носителя протеза в нежелательную ситуацию.
Искусственные суставы, в частности отрезы или протезы коленных суставов, имеют верхнюю соединительную часть и нижнюю соединительную часть, которые соединены друг с другом с помощью шарнирного приспособления. На верхней соединительной части расположена гильза для размещения культи бедра или шины бедра, в то время как на нижней соединительной части расположена ножка для голени или шина голени. В простейшем случае верхняя соединительная часть соединена с возможностью поворота с нижней соединительной частью с помощью одноосевого шарнира. Такая система является достаточной лишь в исключительных случаях для обеспечения желаемого успеха, например поддержки при использовании ортеза или естественной походки при использовании в протезе.
Для максимально естественного выполнения различных требований во время различных фаз шага или других движений предусмотрены создающие сопротивление приспособления, которые обеспечивают сопротивление сгибанию или сопротивление разгибанию. С помощью сопротивления сгибанию устанавливается, насколько легко ножка голени или шина голени совершает маховое движение назад относительно гильзы бедра или шины бедра при приложении силы. Поэтому в коленном суставе с помощью сопротивления сгибанию устанавливается, насколько легко ножка голени или шина голени совершает маховое движение назад относительно гильзы бедра или шины бедра при приложении силы. Сопротивление разгибанию тормозит движение вперед ножки голени или шины голени и обеспечивает, среди прочего, упор для разгибания. В других типах суставов, таких как тазобедренный сустав или голеностопный сустав, эти соображения справедливы в соответствии с кинематическими условиями.
С помощью регулируемых создающих сопротивление приспособлений можно согласовывать сопротивление сгибанию и/или сопротивление разгибанию с пользователем протеза или ортеза или учитывать различные ситуации ходьбы или движения с целью обеспечения согласованного с изменяющимися условиями сопротивления.
Из DE 10 2008 008 284 А1 известен ортопедический коленный сустав с верхней частью и расположенной на ней с возможностью поворота нижней частью, который снабжен несколькими датчиками, например датчиком угла сгибания, датчиком ускорения, датчиком наклона и/или датчиком силы. Упор для разгибания устанавливается в зависимости от получаемых данных датчиков.
В DE 10 2006 021 802 А1 приведено описание устройства управления пассивного протеза коленного сустава с регулируемым демпфированием в направлении сгибания для согласования устройства протеза с верхними соединительными средствами и соединительным элементом для искусственной ступни. Согласование осуществляется для поднимания по лестнице, при этом обнаруживается имеющее небольшой момент поднимание протеза ступни, и в фазе подъема демпфирование сгибания уменьшается ниже уровня, который подходит для ходьбы по плоскости. Демпфирование сгибания можно увеличивать в зависимости от изменения угла колена и в зависимости от воздействующей на голень осевой силы.
В DE 10 2007 053 389 А1 приведено описание способа и устройства для управления ортопедическим суставом нижней конечности по меньшей мере с одной степенью свободы с регулируемым исполнительным механизмом для согласования ортопедического устройства, которое имеет верхние соединительные средства и шарнирно расположенный дистально относительно соединительных средств ортопедический сустав, с ситуациями ходьбы, которые отклоняются от ходьбы по плоскости. При этом с помощью датчиков измеряется несколько параметров ортопедического устройства, измеренные параметры сравниваются с критериями, которые созданы на основании нескольких параметров и/или хода изменения параметров и введены в вычислительный блок, и выбирается критерий, который пригоден на основании определяемых параметров или изменения параметров. На основании выбранного критерия устанавливаются сопротивления разгибанию, величины движения, приводные силы и/или ход их изменения с целью управления особыми функциями, которые отличаются от ходьбы по плоскости. Угол опрокидывания части ортопедического устройства в пространстве и/или ход изменения угла опрокидывания части ортопедического устройства можно использовать в качестве параметров.
В ЕР 1237513В1 приведено описание протеза или ортеза с управляющим устройством и связанным с ним датчиком, который измеряет угол наклона относительно неподвижной линии соединенной с суставом части. На основании данных угла наклона изменяются свойства движения сустава, т.е. сустав тормозится или деблокируется.
Кроме того, из уровня техники известны так называемые коленные шарниры с тормозом, в которых механически увеличивается сопротивление сгибанию и сопротивление разгибанию при возрастающей осевой нагрузке. Это достигается в простейшем случае тем, что предусмотрены две тормозные поверхности, которые прижимаются друг к другу силой реакции грунта. Такое выполнение тормозного приспособления не применимо в современных протезах коленных суставов с управляемыми создающими сопротивление приспособлениями.
Задачей данного изобретения является создание способа и устройства, с помощью которых колено можно автоматически нагружать или блокировать при ходьбе назад с помощью повышенного сопротивления, без необходимости сознательного включения или выключения режима.
Эта задача решена согласно изобретению с помощью способа согласно независимому пункту 1 формулы изобретения и устройства согласно независимому пункту 16 формулы изобретения. Предпочтительные варианты выполнения и модификации изобретения указаны в зависимых пунктах формулы изобретения.
Предлагаемый согласно изобретению способ управления искусственным ортезом или протезом коленного сустава, который содержит создающее сопротивление приспособление, которое снабжено по меньшей мере одним исполнительным механизмом, с помощью которого изменяется сопротивление сгибанию и/или сопротивление разгибанию в зависимости от данных датчиков, при этом во время использования сустава с помощью датчиков обеспечивается информация состояния, предусматривает, что сопротивление сгибанию в фазе стояния повышают или не уменьшают, когда определяют уменьшающийся в направлении вертикали угол инерции голенной части и одновременно нагруженную плюсну. За счет связи измеряемой датчиком величины уменьшающегося угла инерции голенной части в направлении вертикали с наличием нагрузки на плюсну можно надежно обнаруживать ходьбу назад и не инициировать маховую фазу, т.е. не уменьшать сопротивления сгибанию, с целью предотвращения сгибания коленного сустава, когда при ходьбе назад нога с протезом ставится назад и осуществляется наступание на него. При этом возможно, что нога с протезом нагружается в направлении сгибания без подкашивания, так что снабженный ортезом или протезом пациент может идти назад без необходимости особого активирования блокирования. Если распознается ходьба назад, то предпочтительно, когда сопротивление сгибанию повышается или не уменьшается, так что в любом случае не выполняется активирование маховой фазы.
В одной модификации изобретения предусмотрено, что сопротивление повышают или, по меньшей мере, не уменьшают, когда угловая скорость инерции части сустава становится ниже порогового значения, или другими словами, что инициируют маховую фазу с уменьшением сопротивления сгибанию, когда угловая скорость инерции превышает заданное пороговое значение. Возможно также, что посредством определения угла инерции части сустава, в частности голенной части, и угловой скорости инерции части сустава, в частности голенной части, определяют, что пользователь протеза или пользователь ортеза движется назад, и требуется блокированный против сгибания или сильно заторможенный коленный сустав. В соответствии с этим, сопротивление, если оно еще является не достаточно высоким, повышается, так что коленный сустав может быть при необходимости блокирован.
Кроме того, может быть предусмотрено, что определяют ход изменения нагрузки плюсны и повышают сопротивление или не уменьшают, если при уменьшающемся угле инерции увеличивается нагрузка плюсны. В то время, как при движении вперед после удара пяткой нагрузка плюсны увеличивается лишь тогда, когда голенная часть поворачивается за вертикаль вперед, при ходьбе назад нагрузка плюсны уменьшается при уменьшающемся угле инерции, так что при наличии обоих состояний, а именно уменьшающегося угла инерции и уменьшающейся нагрузке плюсны, можно делать вывод о ходьбе назад. В соответствии с этим, сопротивление затем увеличивают до значения, которое предусмотрено для ходьбы назад.
Кроме того, может быть предусмотрено, что сопротивление повышают, соответственно, не уменьшают, когда угол колена составляет меньше 15°. За счет этого исключается, что во время маховой фазы или при согнутом колене при соответствующих углах или угловых скоростях коленный сустав блокируется и больше не может быть согнут. Таким образом, ходьбу назад можно выполнять лишь тогда, когда нога с протезом находится в вытянутом или почти вытянутом положении. Может быть также предусмотрено, что сопротивление повышают или не уменьшают, хотя угол колена составляет больше 15°, когда угловая скорость колена очень мала или имеется статическое состояние, т.е. нога с протезом отставлена назад и не инициировано движение назад. В этом статическом случае трудно распознавать, должно ли состояться движение вперед или назад.
Другим параметром может быть момент колена, который измеряется и служит в качестве основания для повышения или не уменьшения сопротивления. Когда определяют действующий в направлении сгибания момент колена, т.е. когда протез ступни поставлен, и в колене обнаружен момент сгибания, то представлена ситуация, в которой можно предполагать ходьбу назад, так что в этом случае оправдано блокирование сгибания, т.е. повышение сопротивления до значения, которое не обеспечивает возможность сгибания.
Угол инерции голенной части можно определять непосредственно с помощью сенсорного приспособления, которое расположено на голенной части, или же по углу инерции другой соединительной части, например бедренной части, и также по определяемому углу сустава. Поскольку угол сустава между бедренной частью и голенной частью можно использовать также для других сигналов управления, то за счет расположения нескольких датчиков и многократного использования сигналов достигается избыточность, так что при выходе из строя одного датчика протез или ортез остается работоспособным. Изменение угла инерции одной части сустава можно определять непосредственно с помощью гироскопа или посредством дифференцирования сигнала угла инерции части сустава или по сигналу угла инерции одной соединительной части и углу сустава.
Сопротивление сгибанию можно уменьшать в фазе стояния до подходящего для маховой фазы значения, когда определяется увеличивающийся относительно вертикали угол инерции голенной части. Увеличивающийся угол инерции голенной части указывает на то, что пользователь протеза или пользователь ортеза находится в движении вперед, при этом в качестве центра тяжести принимается дистальный конец голенной части. Предусмотрено, что уменьшение осуществляется лишь тогда, когда увеличение угла инерции лежит выше порогового значения. Кроме того, можно уменьшать сопротивление, когда движение голенной части относительно бедренной части происходит не со сгибанием, т.е. с разгибанием или остается постоянным, что означает движение вперед. Сопротивление можно также уменьшать, когда имеется распрямляющий момент колена.
Кроме того, может быть предусмотрено, что определяют расстояние вектора силы реакции грунта до одной части сустава и уменьшают сопротивление тогда, когда превышается пороговое значение расстояния, т.е. когда расстояние вектора силы реакции грунта составляет больше минимального расстояния до одной части сустава, например до продольной оси голенной части на определенной высоте или до поворотной оси коленного сустава.
Сопротивление можно снова уменьшать до пригодного для маховой фазы значения, когда определяется, что момент колена изменился с разгибания на сгибание. При этом уменьшение происходит непосредственно после изменения момента колена с разгибания на сгибание.
Кроме того, может быть предусмотрено, что сопротивление после уменьшения снова увеличивают до значения в фазе стояния, если в течение заданного времени после уменьшения сопротивления не достигается пороговое значение для угла инерции одного компонента сустава, для угловой скорости инерции, для силы реакции грунта, для момента сустава или для расстояния вектора силы до одного компонента сустава. Другими словами, сустав устанавливают снова в состояние фазы стояния, если в течение заданного времени после смены в состояние маховой фазы действительно обнаруживают маховую фазу. Это основывается на том, что инициирование маховой фазы происходит уже перед отрывом носка от грунта с целью обеспечения возможности своевременного инициирования маховой фазы. Однако если маховая фаза затем не будет инициирована, что имеет место, например, при круговом движении, необходимо снова переключаться на обеспечивающее безопасность сопротивление фазы стояния. Для этого предусмотрен таймер, с помощью которого проверяют, имеется ли в течение определенного времени ожидаемое значение для одного из указанных выше параметров. Сопротивление остается уменьшенным, так что остается активированной маховая фаза, когда обнаруживается увеличение угла колена, т.е. когда действительно инициирована маховая фаза. Возможно также, что после достижения порогового значения и деблокирования маховой фазы таймер включается лишь тогда, когда достигается второе пороговое значение, которое меньше первого порогового значения. Может быть также предусмотрено, что сопротивление после уменьшения снова повышают до значения фазы стояния, если после уменьшения сопротивления и достижения после уменьшения порогового значения для угла инерции одного компонента сустава, угловой скорости инерции, силы реакции грунта, момента сустава или расстояния вектора силы до компонент сустава в течение заданного времени не достигается другое пороговое значение для угла инерции, угловой скорости инерции, для силы реакции грунта, для момента сустава или для расстояния вектора силы до одного компонента сустава.
Для управления искусственными суставами на основании данных датчиков, устанавливают такие датчики, которые как раз необходимы для обеспечения стандарта безопасности при обнаружении переходов между фазами ходьбы. Если применяются выходящие за пределы минимальных требований датчики, например с целью повышения стандарта безопасности, то эта избыточность датчиков позволяет реализовать управление, которое использует не все расположенные в суставе или на суставе датчики и, тем не менее, обеспечивает минимальный стандарт безопасности. Предусмотрено использование избыточности датчиков для реализации альтернативных управлений, которые в случае неисправности датчиков все же обеспечивают ходьбу с маховой фазой и минимальный стандарт безопасности.
Устройство для осуществления указанного выше способа, содержащее регулируемое создающее сопротивление приспособление, которое расположено между двумя установленными шарнирно друг относительно друга компонентами искусственного ортеза или протеза коленного сустава, управляющий блок и датчики, которые измеряют информацию состояния устройства, характеризуется тем, что предусмотрено регулировочное приспособление, и с помощью регулировочного приспособления обеспечивается возможность активирования или деактивирования изменения сопротивления в зависимости от нагрузки. В зависимости от наличия или отсутствия нагрузки плюсны активируется или деактивируется создающее сопротивление приспособление. За счет этого, наряду с автоматическим распознаванием ходьбы назад и автоматическим согласованием сопротивления, достигается также сознательное активирование режима ходьбы назад, а также можно выключать этот режим и удалять из стандартной программы управления коленом.
Ниже приводится более подробное пояснение примеров выполнения со ссылками на прилагаемые чертежи, на которых схематично изображено:
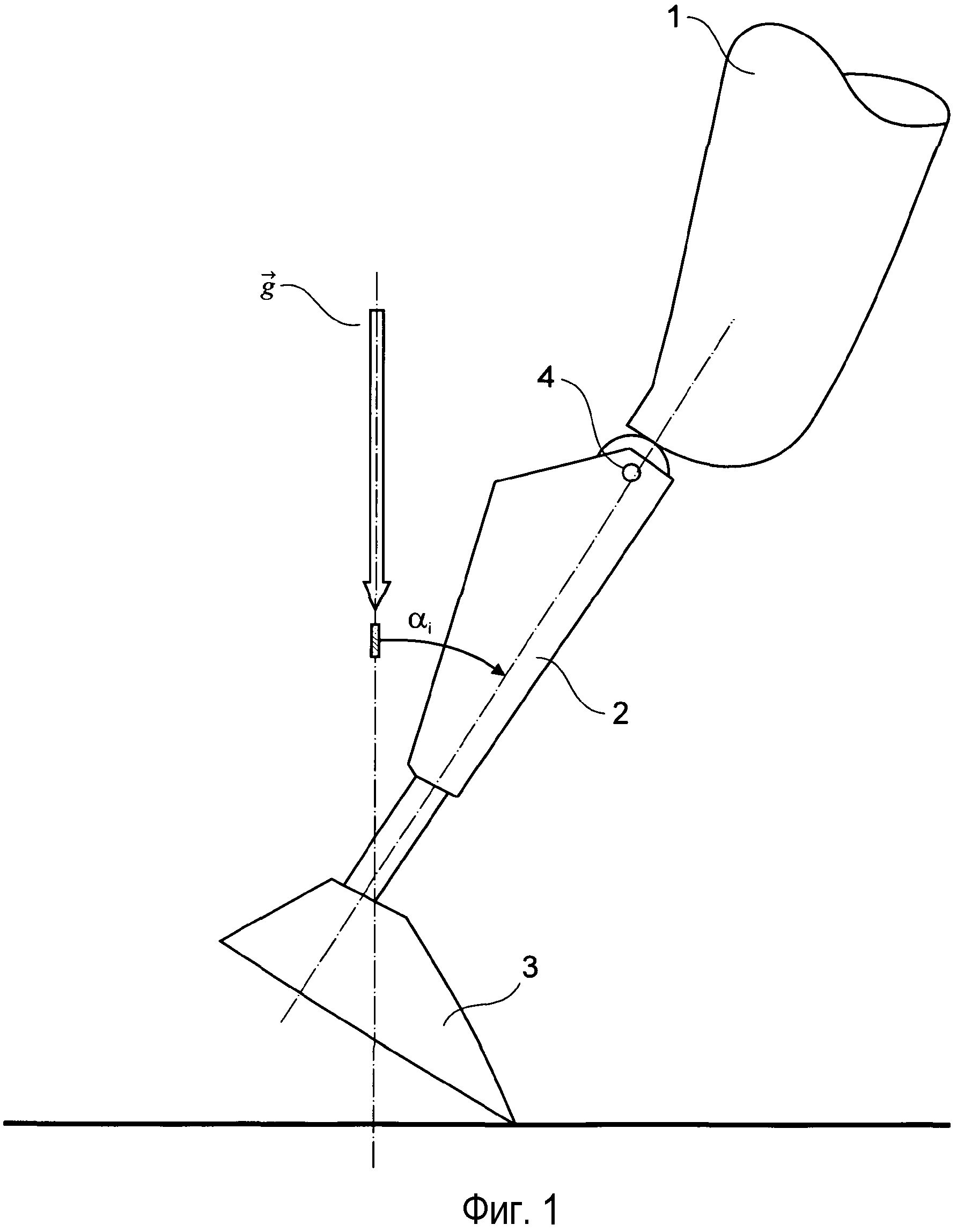
Фиг.1 - протез во время ходьбы назад; и
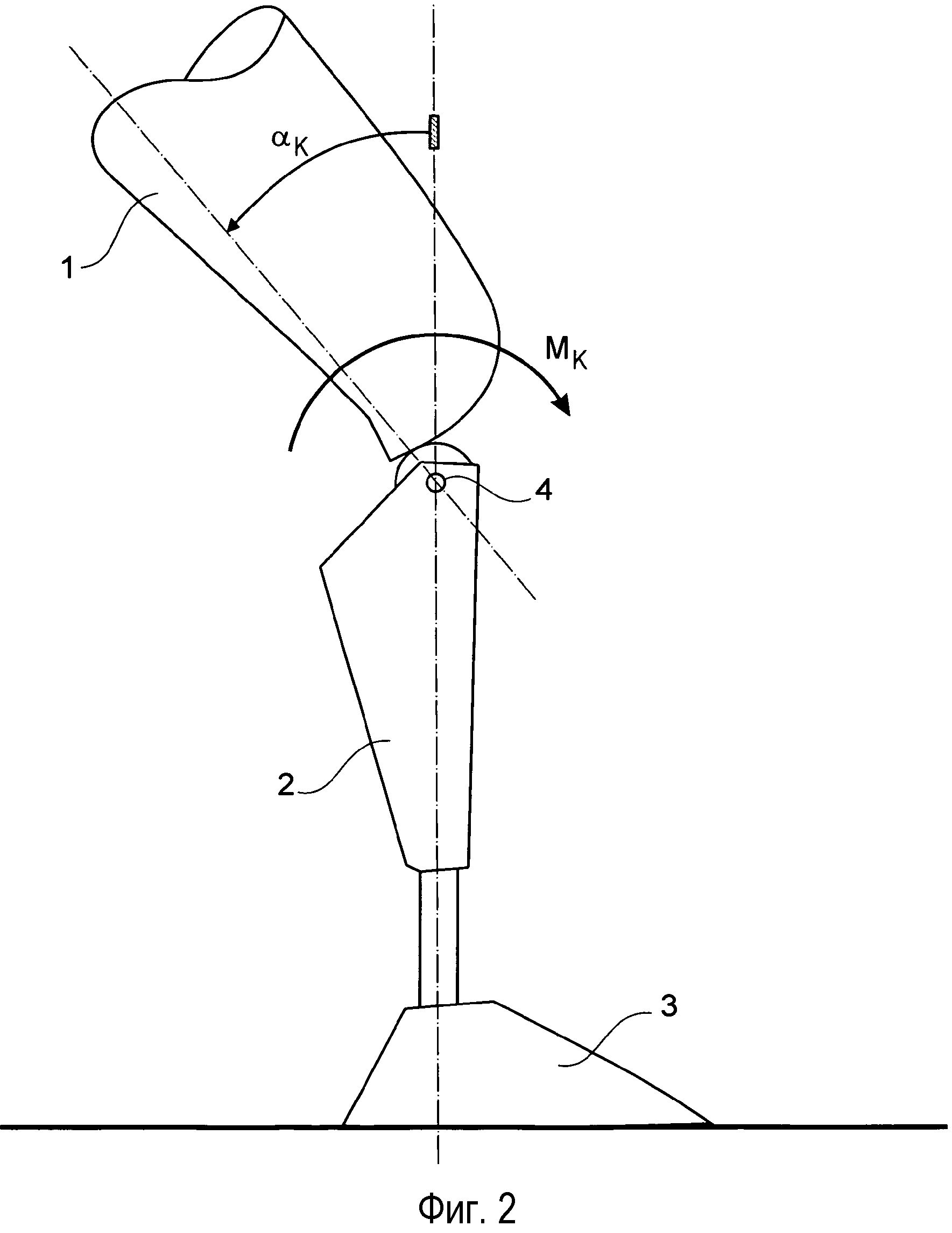
Фиг.2 - протез в согнутом положении.
На Фиг.1 показан протез с бедренной частью 1 и шарнирно соединенной с ней голенной частью 2. На дистальном конце голенной части 2 расположен протез 3 ступни. Голенная часть 2 шарнирно соединена с бедренной частью 1 через протез 4 коленного сустава. Бедренная часть 1 выполнена в виде гильзы для бедра, так что культю бедра можно вводить в нее и закреплять. Угол αI инерции является абсолютным углом компонента сустава относительно вертикали, из которого получается угловая скорость ωI инерции как производная угла инерции во времени. Исходя из ситуации стояния, при ходьбе назад нога, в данном случае протез, ставится назад, т.е. противоположно нормальному направлению взгляда пользователя протеза. За счет этого получается, что угол αI инерции голенной части 2 относительно направления силы тяжести, которая представлена вектором g силы тяжести, сначала уменьшается до постановки протеза 3 ступни на грунт. После постановки точкой поворота является протез ступни. Когда пациент идет назад, то после постановки ступни угол αI инерции уменьшается, тем самым угловая скорость ωI инерции становится отрицательной. Таким образом, в этой ситуации можно с помощью угловой скорости ωI инерции различать между ходьбой вперед и ходьбой назад. В то время как при ходьбе вперед в соответствующей ситуации, т.е. при нагрузке плюсны и опрокинутом вперед протезе и положительной угловой скорости ωI инерции необходимо уменьшать сопротивление для маховой фазы, при ходьбе назад в этой ситуации, т.е. при нагрузке плюсны и опрокинутом вперед протезе и отрицательной угловой скорости ωI инерции, сопротивление для маховой фазы не должно уменьшаться. Угол αI инерции получается, как показано на Фигуре, между вертикалью и продольным направлением голенной части 2. При этом в качестве поворотной точки или центра тяжести для определения увеличивающегося угла αI инерции принимается дистальный конец голенной части 2, так что угол αI инерции получается, как показано на Фигуре, от вертикали до продольного направления голенной части 2. Продольное направление или продольная ось голенной части 2 проходит через поворотную ось протеза коленного сустава и предпочтительно также через поворотную ось голеностопного сустава или же центрально между протезом ступни 3 и голенной частью 2. Угол αI инерции голенной части 2 можно определять непосредственно с помощью расположенного на голенной части 2 сенсорного приспособления, в качестве альтернативного решения его можно определять с помощью датчика на бедренной части 1 и датчика угла колена, который измеряет угол между бедренной частью 1 и голенной частью 2.
Для определения угловой скорости инерции определяется изменение угла αI инерции во времени, так что получается угловая скорость ωI инерции, которую можно определять по величине и направлению. Если имеется определенный угол αI инерции и определенная угловая скорость ωI инерции, то инициируется маховая фаза, если превышается определенное пороговое значение для угловой скорости ωI инерции. Если имеется уменьшающийся угол αI инерции и, кроме того, еще нагрузка плюсны, то можно делать вывод о ходьбе назад, так что сопротивление сгибанию не уменьшается, а сохраняется или повышается, чтобы не инициировать сгибание в маховой фазе.
На Фиг.2 показан протез в плоско установленном на грунт положении, и эта Фигура служит для определения знаков в данном описании. При другом определении знаков могут быть, соответственно, другие обозначения. При этом угол αK колена соответствует углу бедренной части 1 относительно голенной части 2, в соответствии с этим, угловая скорость ωK колена получается как производная угла αK колена во времени. Вокруг шарнирной оси протеза 4 коленного сустава действует момент МК колена, который в направлении разгибания принимается как действующий положительно. Если имеется угловая скорость сустава, то исходят из того, что сустав сгибается под нагрузкой. Таким образом, уменьшение сопротивления вызывало бы внезапно ненадежную ситуацию и поэтому должно быть исключено. То же относится к слишком большому углу αK колена, который указывает на то, что протез уже согнут и изменение сопротивления снова приводило бы внезапно к ненадежной ситуации и поэтому должно быть исключено.
Кроме того, могут быть также определены другие углы инерции, которые должны достигать заданного порогового значения для принятия решения о ходьбе назад или инициировании маховой фазы. При этом можно использовать угол инерции голенной части 2, протеза 3 ступни или бедренной части 1.
Реферат
Группа изобретений относится к медицине. Способ управления искусственным ортезом или протезом сустава нижней конечности содержит создающее сопротивление приспособление, которое снабжено по меньшей мере одним исполнительным механизмом, с помощью которого изменяется сопротивление сгибанию и/или сопротивление разгибанию в зависимости от данных датчиков. Во время пользования суставом с помощью датчиков обеспечивается информация состояния. Сопротивление сгибанию в фазе стояния повышают или не уменьшают, когда выявляют уменьшающийся в направлении вертикали угол инерции голенной части и одновременно нагруженную плюсну. Устройство для осуществления упомянутого способа содержит регулируемое создающее сопротивление приспособление, которое расположено между двумя установленными шарнирно друг относительно друга компонентами искусственного ортеза или протеза коленного сустава, управляющий блок и датчики для получения информации о состоянии устройства. В устройстве предусмотрено регулировочное приспособление, и с помощью этого регулировочного приспособления обеспечивается возможность активирования или деактивирования изменения сопротивления в зависимости от нагрузки. Изобретения обеспечивают возможность того, что колено можно автоматически нагружать или блокировать при ходьбе назад с помощью повышенного сопротивления, без необходимости сознательного включения или выключения режима. 2 н. и 14 з.п.ф-лы, 2 ил.
Формула
Документы, цитированные в отчёте о поиске
Искусственный коленный сустав с регулированием сил подтормаживания раздельно при сгибании и разгибании
Способ управления коленным сочленением протеза ноги и устройство для его осуществления
Способ адаптивного управления амортизацией протезного колена в фазе стояния, способ адаптивного управления амортизацией момента протезного колена в фазе ходьбы, протезное колено, приспосабливающееся для управления моментом амортизации во время фазы стояни
Комментарии