Способ управления коленным сочленением протеза ноги и устройство для его осуществления - RU2089138C1
Код документа: RU2089138C1
Чертежи




























Описание
Изобретение относится к медицине, а именно к протезированию, представляет собой способ и устройство управления коленным сочленением протеза ноги с использованием программируемого микропроцессора и гидравлического демпфера и может быть применено в протезе, устанавливаемом при ампутации ноги выше колена.
В настоящее время существует около пятидесяти различных видов протеза ноги. Большинство из них содержат полость для приема культи пользователя; коленную подвеску, связанную с указанной полостью; каркас, идущий вниз от подвески и связанный с ней горизонтальным стержнем (названные элементы, соединенные вместе, образуют искусственное коленное сочленение); опору и искусственную стопу, связанные с основанием каркаса; и средства контроля за коленным сочленением путем запирания его, чтобы предотвратить от изгиба под нагрузкой в фазах стояния, шага, и освобождения в фазе маха.
Естественное колено приводится в действие мускулами. Мускулы имеют два элемента. Один это активная сила, развиваемая при сокращении, другой - переменная жесткость. Невозможно воспроизвести мускульное сокращение в протезе ноги из-за ограничений, накладываемых весом человека. Как следствие, проводимые работы сосредоточились на осуществлении изменения жесткости в коленном сочленении. Это обычно реализуется в виде переключения коленного сочленения с запертого состояния на свободное для поворота.
В последние годы исследователи улучшили контроль за действиями искусственного коленного сочленения, чтобы приблизить походку к естественной. Так, в авт. св. СССР N 1333333, кл. A 61 F 2/70, 1985,представлено решение, согласно которому используется датчик, чувствительный к углу поворота коленного сочленения, и средства, защищающие или освобождающие коленный шарнир в зависимости от этого угла.
Недостатком указанного решения является то, что коленное сочленение может находиться только в крайних состояниях: запертом или полностью свободном.
Другим известным решением является система Henschke Mauch S-N-S управления протезом ноги. Эта система использует линейный гидравлический демпфер для обеспечения сопротивления повороту коленного сочленения в фазе стояния. Скорость демпфирования может изменяться вручную. Когда коленное сочленение полностью свободно, демпфер выключается из работы, т.е. у системы отсутствует автоматическое изменение демпфирования и у нее существуют опять только два состояния: сильное сопротивление сгибанию в фазе стояния и свободное вращение в фазе шага.
Наиболее близким к изобретению являются способ и устройство управления коленным сочленением протеза ноги [1] Согласно им управление осуществляется с использованием микропроцессора. При этом измеряют нагрузку нижней части протеза ноги, вырабатывают с помощью электронных средств соответствующие электрические сигналы, анализируют их микропроцессором и воздействуют на состояние коленного сочленения.
Датчик нагрузки устанавливают между коленным сочленением и стопой. Когда сигнал нагрузки указывает, что фаза шага заканчивается и нагрузка переносится на ногу, микропроцессор через электродвигатель или электромагнит запирает коленное сочленение. Когда завершена фаза стояния, микропроцессор заставляет привод освободить коленное сочленение так, что оно может свободно поворачиваться вокруг оси в фазе шага.
Однако и это решение не позволяет в достаточной степени приблизить походку к естественной. Дело в том, что коленное сочленение во время его работы сгибается и разгибается. При сгибании оно вращается, чтобы сблизить верхний и нижний сегменты ноги. При разгибании коленное сочленение вращается в противоположном направлении, сегменты ноги отходят друг от друга и нога выпрямляется. Для искусственного коленного сочленения необходимо создание различных режимов в фазах его сгибания и разгибания. Например, желательно в начале фазы стояния (т.е. приложения веса) немного согнуть колено, а затем запереть его от дальнейшего сгибания и освободить колено для разгибания, когда нога выпрямляется благодаря действиям тела. В дальнейшей фазе этого действия состояние коленного сочленения изменяется между запертым положением или жесткостью в сгибании и свободой в разгибании в одно и то же время.
До сих пор не было искусственного коленного сочленения, которое позволяет отдельно, одновременно и автоматически управлять сгибанием и разгибанием. Задача изобретения создание такого механизма и введение его в улучшенный протез.
Предметом изобретения является способ управления коленным сочленением протеза ноги, заключающийся в том, что постоянно измеряют нагрузку нижней части протеза ноги во время его использования, вырабатывают соответствующие электрические сигналы, анализируют их с помощью микропроцессора и воздействуют на состояние коленного сочленения, и отличающийся тем, что наряду с измерением нагрузки нижней части протеза ноги измеряют угол поворота коленного сочленения, вырабатывают электрические сигналы, соответствующие измеренным углам, сравнивают выработанные сигналы о нагрузке нижней части протеза ноги и угле поворота коленного сочленения с предварительно записанными в памяти микропроцессора пороговыми величинами и, когда сигналы достигают значений записанных пороговых величин, автоматически изменяют сопротивление коленного сочленения сгибанию, разгибанию или тому и другому.
Предлагаемый способ имеет развитие в части выбора пороговых величин применительно к движению по ровной поверхности и отдельно при других действиях, таких как спотыкание, усаживание, спуск по лестнице.
Предлагаемый способ управления коленным сочленением применительно к движению по ровной поверхности дополнительно характеризуется тем, что записанные в памяти микропроцессора пороговые величины выбирают из величин нагрузки нижней части ноги и угла колена, которые соответствуют точкам перехода между состояниями движений при каждом шаге в шаблонах нормальной походки. Благодаря этому протез повторяет, например, такие действия естественного колена при шаге по ровной поверхности, как сгибание сочленения в начале фазы стояния, блокирование сочленения от сгибания во время осуществления разгибания в середине фазы стояния и освобождение сочленения при начале фазы маха.
Другое развитие предлагаемого способа управления коленным сочленением состоит в том, что записанные в памяти микропроцессора пороговые величины выбирают из группы, содержащей абсолютные и производные величины нагрузки нижней части протеза ноги и угла коленного сочленения, соответствующие точкам перехода между состояниями повторяющихся движений протеза ноги, с учетом времени, прошедшего с момента перехода в последнее состояние и возможных будущих состояний при движении. Это позволяет осуществлять управление коленным сочленением протеза при усаживании пользователя, спуске по лестнице, а также распознавать такое отклонение от нормы, как натыкание носком протеза на препятствие, и инициировать необходимые корректировочные действия.
Предметом изобретения также является устройство управления коленным сочленением протеза ноги, имеющего верхнюю и нижнюю части ноги и стопу, содержащее сенсорные средства, связанные с частями протеза ноги, электронные средства, связанные с сенсорными средствами, микропроцессор с программными средствами, вход которого соединен с выходом электронных средств, приводные средства, управляемые микропроцессором и воздействующие на коленное сочленение, отличающееся тем, что оно снабжено демпферными средствами отдельного и различного дискретного демпфирования сгибательных и разгибательных движений коленного сочленения, при этом демпферные средства шарнирно соединены с частями протеза ноги и связаны с приводными средствами, а сенсорные средства выполнены в виде датчика угла колена и датчиков положения центра тяжести тела по отношению к стопе.
Предлагаемые способ и устройство благодаря указанной паре сенсорных средств, введению демпферных средств отдельного и различного регулирования сгибания и разгибания и тому, что программа действий основана на шаблонах нормальной походки и повторяющихся движений протеза ноги, позволяют создать механизм коленного сочленения, характеризующийся управляемыми, предсказуемыми реакциями. Пользователь проникается доверием к системе, походка становится более свободной и ритмичной. Программу действий можно "тонко настроить" для конкретного пользователя.
Согласно изобретению устройство имеет развитие, характеризующееся тем, что демпферные средства выполнены в виде гидравлического демпфера, содержащего цилиндр, поршень и связанный с коленным сочленением шток, при этом поршень установлен в цилиндре с боковым зазором, перекрытым в средней части уплотняющим кольцом, выполнен полым и имеет в торцевых стенках отверстия, сообщающиеся через запорные клапаны с соответствующими полостями камеры цилиндра, а в боковой стенке диаметрально расположенные две верхние и две нижние щели, попарно сообщающиеся через боковой зазор между цилиндром и поршнем с соответствующей полостью камеры цилиндра и перекрываемые вращающимися клапанными выступами, смонтированными на связанной с приводными средствами штанге, пропущенной внутри штока по его оси.
Указанное выполнение обеспечивает именно двустороннее демпфирование путем перекачивания жидкости из одной части камеры в другую через один проход, когда поршень движется вниз, и через другой проход, когда поршень перемещается вверх.
Еще одним развитием предложенного устройства является выполнение датчика положения центра тяжести тела по отношению к стопе в виде датчика нагрузки нижней части протеза ноги.
Наряду со способом и устройством управления коленным сочленением предметом изобретения является собственно демпфер коленного сочленения протеза ноги, содержащий закрытый цилиндр, полость которого образует камеру для гидравлической жидкости, поршень и связанный с коленным сочленением шток, отличающийся тем, что поршень установлен в цилиндре с зазором, перекрытым в средней части уплотняющим кольцом, выполнен полым и имеет в торцевых стенках отверстия, сообщающиеся через запорные клапаны с соответствующими частями камеры цилиндра, а в боковой стенке диаметрально расположенные две верхние и две нижние щели, попарно сообщающиеся через боковой зазор между цилиндром и поршнем с соответствующей частью камеры цилиндра и перекрываемые вращающимися клапанными средствами.
Такой демпфер, как уже отмечалось, является именно двусторонним. При этом предлагается его предпочтительное развитие, заключающееся в том, что клапанные средства выполнены в виде двух выступов, расположенных в камере поршня радиально от его оси напротив друг друга, прилегающих к внутренней поверхности боковой стенки поршня, имеющих протяженность по окружности, не меньшую двойной длины каждой щели, и смонтированных на связанной с приводными средствами штанге, пропущенной внутри штока по его оси, а нижняя и верхняя щели с каждой стороны боковой стенки поршня смещены относительно друг друга по вертикали.
Благодаря указанному развитию двустороннего демпфера последовательное и отдельное открывание щелей для регулировки демпфирования при сгибании и разгибании реализуется при помощи одного привода (сервомотора) и клапана, чем достигаются компактность и легкость конструкции. Кроме того, поскольку радиально расположенные напротив друг друга клапанные выступы не прижимаются к одной стороне боковой стенки поршня под большим давлением и не заклинивают, возможно использование для управления демпфером сервомотора малой мощности.
Таким образом, сущность изобретения основана на том принципе, что каждый шаг может быть разделен на стадии и что можно улучшить реакцию на каждой стадии, тем самым улучшая походку. Разделение шага осуществляется путем получения информации от протеза, преобразования ее в электрические сигналы и анализа программными средствами и затем улучшением реакции системы путем отдельного и различного изменения сопротивления коленного сочленения сгибанию и разгибанию.
На фиг. 1 изображена блок-схема реализации способа; на фиг.2 упрощенный вид датчика Холла, используемого для выработки электрических сигналов, характеризующих угол колена; на фиг.3 график зависимости выходного напряжения датчика Холла от угла поворота коленного сочленения; на фиг.4 вид протеза в разобранном виде; на фиг.5 вид протеза в собранном виде; на фиг.6 расположение датчиков нагрузки на каркасе; на фиг.7 график выходного сигнала датчика нагрузки; на фиг.8 диаграмма состояний при ходьбе по ровной поверхности; на фиг.9 диаграмма, показывающая связь состояний при ходьбе по ровной поверхности с действиями протеза ноги, положением поршня и клапанных выступов; на фиг. 10 графики изменения сигналов угла колена и нагрузки (сгибательного момента лодыжки) во время одного шага при ходьбе по ровной поверхности; на фиг. 11 диаграмма состояний при усаживании; на фиг.12 - диаграмма, показывающая связь состояний при усаживании с действиями протеза ноги, положением поршня и клапанных выступов; на фиг.13 график изменения сигналов угла колена и нагрузки во время движений при усаживании; на фиг.14 - диаграмма состояний при спуске по лестнице; на фиг.15 диаграмма, показывающая связь состояний при спуске по лестнице с действиями протеза ноги, положением поршня и клапанных выступов; на фиг.16 график изменения сигналов угла колена и нагрузки во время движения при спуске по лестнице; на фиг.17 - пояснительная диаграмма, показывающая циклы состояний для различных видов действий; на фиг.18 пояснительная диаграмма, соответствующая фиг.17 и показывающая различные действия тела; на фиг. 19 и 20 упрощенные боковые виды цилиндра и поршня с указанием пути движения жидкости при сгибании и разгибании соответственно; на фиг.21 упрощенный вид внутренней части поршня; на фиг.22-30 виды, подобные виду фиг.20, показывающие клапанные выступы в разных положениях; на фиг. 31 боковой вид цилиндра и поршня; на фиг.32 - блок-схема электрической части устройства; на фиг. 33 электрическая схема чипа микропроцессора; на фиг.34 электрическая схема узлов опорного напряжения и регулятора напряжения для аналого-цифрового преобразователя в составе чипа микропроцессора; на фиг.35 принципиальная электрическая схема блока формирования сигналов угла колена; на фиг.36 принципиальная электрическая схема блока формирования сигналов нагрузки.
Сенсорные средства в виде датчиков именно двух параметров (угла колена и нагрузки нижней части протеза ноги) осуществляют постоянный контроль за состоянием протеза во время его использования. Поступающие по двум каналам сигналы усиливаются и анализируются микропроцессором с программными средствами, которые приспособлены для сравнения поступающих сигналов с записанными в памяти микропроцессора пороговыми величинами и выработки команды демпферным средствам на изменение сопротивления коленного сочленения протеза ноги сгибанию, разгибанию или тому и другому при равенстве поступающих сигналов и записанных в памяти пороговых величин.
Ниже дается подробное описание протеза в конструктивной связи с используемыми датчиками и демпферными средствами, детально рассматривается специально разработанный гидравлический двунаправленный демпфер коленного сочленения, приводятся данные об используемых электронных блоках, излагается принцип реализованного программного обеспечения (которое полностью представлено в приложении) и описывается работа всей системы в различных возможных режимах, а именно, при ходьбе по ровной поверхности, спотыкании, усаживании и спуске по лестнице.
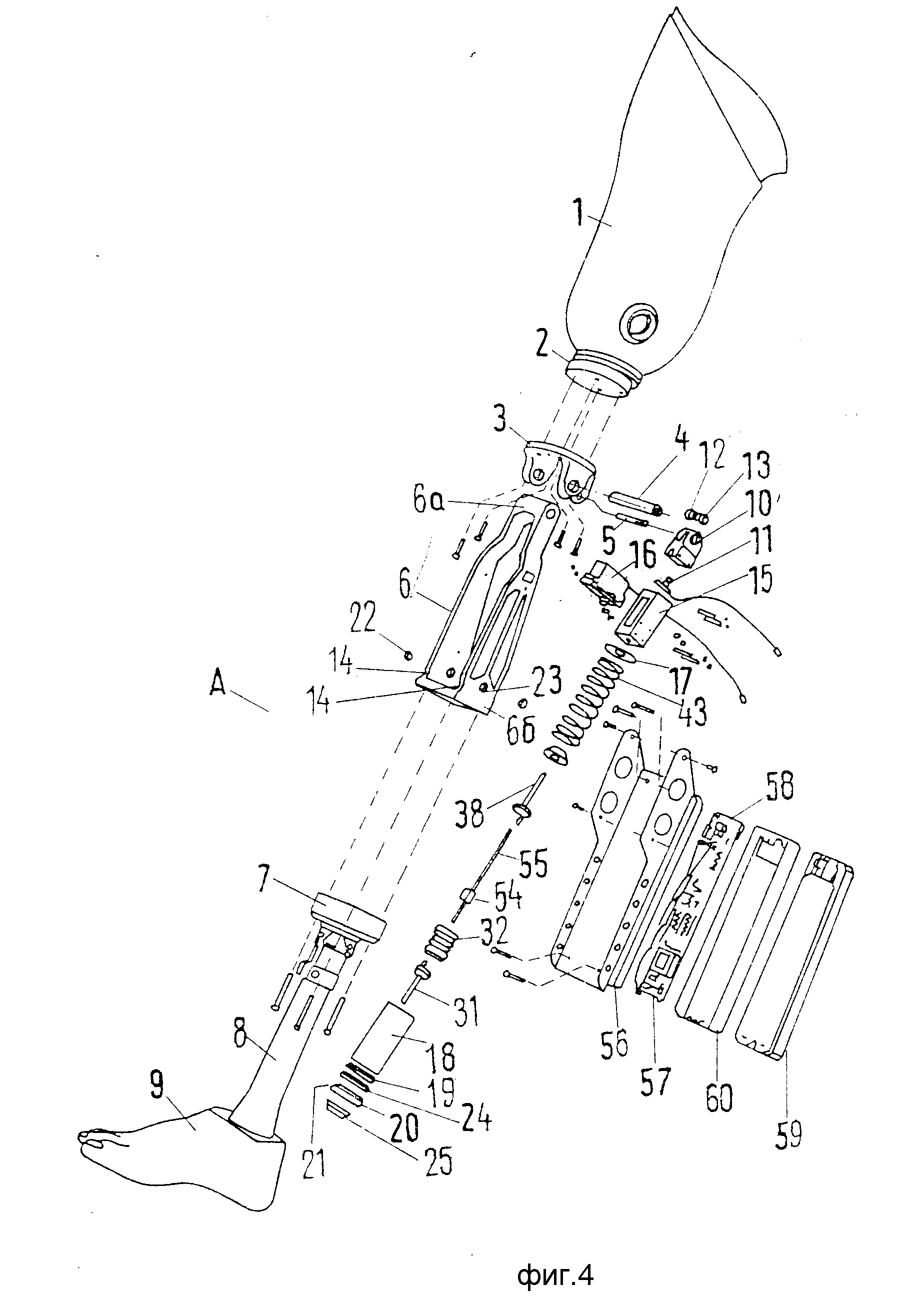
В соответствии с фиг.4 и 5 протез А имеет приемную полость 1, которая обычно делается так, чтобы точно подходить к культе, и держится на ней путем присасывания. К основанию приемной полости 1 присоединена регулировочная пластина 2, к которой винтами прикрепляется коленная подвеска 3. Подвеска 3 имеет отверстия для установки и крепления основного стержня 4 коленного сочленения и стержня 5 демпфера Б (см.фиг.5). Каркас 6, имеющий в верхней части опору 6а, смонтирован с возможностью вращения на подвеске 3 при помощи основного 4, который проходит сквозь опору 6а. Каркас 6, таким образом, может свободно вращаться на зафиксированном основном стержне 4. В нижней части каркас 6 образует прямоугольное гнездо 6б для подсоединения прямоугольного блока 7, который прикрепляется к верхнему концу опоры 8 стопы 9. Винты крепят блок 7 к гнезду 6б каркаса 6. Стопа 9 прикрепляется к нижнему концу опоры 8.
На стержне 5 демпфера смонтирован с возможностью вращения верхний корпус 10 подшипника. Стержень 5 расположен сзади основного стержня 4.
Датчик 11 Холла предназначен для слежения за изменением угла колена или поворота коленного сочленения. Может быть использован известный датчик модели UGN-3503U фирмы Sprague Electronic. Он содержит (см. фиг.2) преобразователь 11а Холла и кольцеобразный магнит 12, который прикрепляется к стационарному стержню 5 держателем 13. Преобразователь 11а Холла расположен на вращающемся верхнем корпусе 10 подшипника напротив кольцеобразного магнита 12. Когда коленное сочленение поворачивается, корпус 10 вращается вокруг стержня 5, что приводит к перемещению преобразователя 11а относительно магнита 12 и изменению в соответствии с эффектом Холла напряжения на выводах преобразователя. Это напряжение усиливается (см. фиг.35), и получаемый сигнал составляет 0,5 В, когда коленное сочленение полностью выпрямлено, и 4,5 В, когда оно полностью согнуто. Иными словами, сигнал преобразователя 11а наименьший, когда колено выпрямлено, и увеличивается, когда колено согнуто. Фиг.3 показывает типичное выходное усиленное напряжение преобразователя 11а по отношению к углу колена.
Силы, действующие на стопу 9, измеряются по нагрузке каркаса 6. Это осуществляется при помощи пленочных датчиков 14 нагрузки. Четыре датчика 14 типа СЕА-06-062 UW-350 Micro Measurement Group Inc. Raleigh, North Carolina расположены по два спереди и сзади каркаса 6 у его основания (см. фиг.6), чтобы измерять и различать нагрузку на пятку и носок стопы 9. Тем самым, измерение нагрузки показывает расположен ли центр тяжести тела спереди, сзади или по центру по отношению к стопе 9. Четыре датчика собраны по схеме моста Уитстона (см. фиг.36), чтобы получить линейную зависимость электрического сигнала от нагрузки (см. фиг.7). Выходное напряжение моста усиливается дифференциальным усилителем, и получаемый сигнал составляет 0,5 В, когда нагрузка приходится целиком на пятку, и 4,5 В, когда нагрузка целиком переносится на носок. Отсутствие нагрузки или равная нагрузка на носок и пятку дают сигнал 2,5 В. В схеме (фиг. 36) предусмотрены настройка усиления и настройка смещения.
К основанию корпуса 10 подшипника крепится подвеска 15 сервомотора 16. Сервомотор 16 монтируется внутри подвески 15. Используется сервомотор 94737 фирмы Airtronics Ltd. На основании подвески 15 сервомотора 16 монтируется для целей, которые будут описаны позже, верхняя стопорная пружина 17.
Между подвеской 15 и основанием каркаса 6 расположен демпфер Б (см. фиг. 6).
Демпфер Б содержит полый цилиндр 18, снабженный снаружи резьбой. На наружную резьбу цилиндра 18 для целей, которые объясняются ниже, навернуто пружинное кольцо 19. Опорное кольцо 20 тоже навернуто на наружную резьбу цилиндра 18 и имеет радиально расположенные, обычно по центральной оси, снабженные резьбой отверстия 21, которые подходят к нижним опорным штырям 22, продетым сквозь отверстия 23 в основании каркаса 6. Таким образом, основание цилиндра 18 вращательно связано с основанием каркаса 6 путем вкручивания штырей 22 в отверстия 21 кольца 20. Запорное кольцо 24, навернутое на наружную резьбу цилиндра 18, затянуто вокруг кольца 20, чтобы держать его на месте. Полость цилиндра 18 в его нижнем торце закрыто нижней крышкой 25. Она удерживается на месте пружинным стопорным кольцом 26 (см. фиг.31). Крышка 25 несет периферическое кольцо 27 для уплотнения боковой стенки 28 цилиндра 18 и имеет отверстие 29, в которое продето кольцо 30, уплотняющее глухой шток (толкатель) 31 поршня 32.
В верхнем торце цилиндра 18 имеется крышка 33, удерживаемая на месте пружинным стопорным кольцом 34. Крышка 33 тоже несет периферическое кольцо 35 для уплотнения боковой стенки 28 цилиндра 18 и имеет отверстие 36, в которое продето кольцо 37, уплотняющее шток 38 поршня 32.
В полости 39 цилиндра 18 расположен пустотелый цилиндрический поршень 32. Поршень 32 содержит открытый на конце цилиндр 40, имеющий верхний и нижний колпачки 41 и 42, ввинченные в него. Шток 38 поршня проходит вверх от колпачка 41 сквозь отверстие 36 в крышке 33 и крепится к подвеске 15 сервомотора 16. Из сказанного следует, что корпус 10 подшипника, подвеска 15 сервомотора 16 и шток 38 поршня 32 образуют цепь деталей, связанных со стержнем 5 демпфера и пластиной 2 подвески 3. Так, если полость 1 поворачивается вокруг основного стержня 4, то это движение переходит в линейное перемещение штока 38 поршня 32.
Цилиндр 18 между верхней стопорной пружиной 17 и нижним пружинным стопорным кольцом 19 охватывается трубчатой пружиной 43, чтобы увеличить степень сгибания колена во время фазы маха, что необходимо для увеличения скорости ходьбы.
Поршень 32 и цилиндр 18 показаны в упрощенном виде на фиг.19 и 20, где потоки жидкости при сгибании и разгибании коленного сочленения обозначены стрелками.
Цилиндр 18 закрытая или заваренная деталь, наполненная гидравлической жидкостью. Поршень 32 установлен в цилиндре с боковым зазором, перекрытым в средней части уплотняющим кольцом 44.
Верхний колпачок 41 поршня 32 имеет отверстие 45, открывающееся в камеру 46 поршня. Пружинный односторонний запорный клапан 47 контролирует отверстие 45 и позволяет сжатой жидкости двигаться вниз из верхней части камеры 48 цилиндра в камеру 46 поршня.
Нижний колпачок 42 поршня 32 имеет соответственно отверстие 49 (см. фиг. 31), открывающееся в камеру 46 поршня. Пружинный односторонний запорный клапан 50 контролирует отверстие 49 и позволяет сжатой жидкости двигаться вверх из нижней части камеры 48 цилиндра в камеру 46 поршня.
Сквозь боковую стенку 51 поршня над уплотняющим кольцом 44 проходит пара диаметрально расположенных щелей 52 для регулировки демпфирования при сгибании. Вторая пара диаметрально расположенных щелей 53 для регулировки демпфирования при разгибании проходит сквозь боковую стенку 51 поршня под уплотняющим кольцом 44.
Из изложенного в соответствии с фиг.19 следует, что, когда вес тела человека давит вниз на шток 38 и поршень 32 и щели 52 открыты, жидкость может перемещаться вверх из нижней части камеры 48 цилиндра 18 через нижний запорный клапан 50 в камеру 46 поршня 32, а из камеры 46 через щели 52 в верхнюю часть камеры 48 цилиндра. То есть, пока щели 52 открыты, поршень 32 может двигаться вниз, демпфер Б выключен, и тем самым возможно свободное сгибание коленного сочленения. Если щели 52 только частично открыты, то существует демпфирование (сопротивление повороту колена при сгибании). Если щели 52 закрыты, поршень 32 не может двигаться вниз и коленное сочленение блокировано от сгибания.
Сходным образом, в соответствии с фиг.20, когда шток 38 и поршень 32 двигаются вверх, а щели 53 открыты, сжатая жидкость может перемещаться вниз из верхней части камеры 48 цилиндра 18 через верхний запорный клапан 47 в камеру 46 поршня 32 и через щели 53 в нижнюю часть 48 цилиндра. Таким образом, пока щели 53 открыты, поршень 32 может двигаться вверх, демпфер Б выключен, и осуществляется свободное разгибание коленного сочленения. Если щели 53 открыты только частично, то реализуется демпфирование (сопротивление разгибанию колена). Если щели 53 закрыты, поршень 32 не может двигаться вверх, и коленное сочленение блокировано от разгибания.
Ограничение потока жидкости через щели уменьшает поток жидкости через пустотелый поршень, тем самым происходит управление подвижностью поршня.
Уровень потока жидкости регулируется вращающимся клапаном, предпочтительно выполненным в виде двух выступов 54, смонтированных на штанге 55, пропущенной внутри штока 38 по его оси (см. фиг.31). Штанга 55 связана приводом с сервмотором 16.
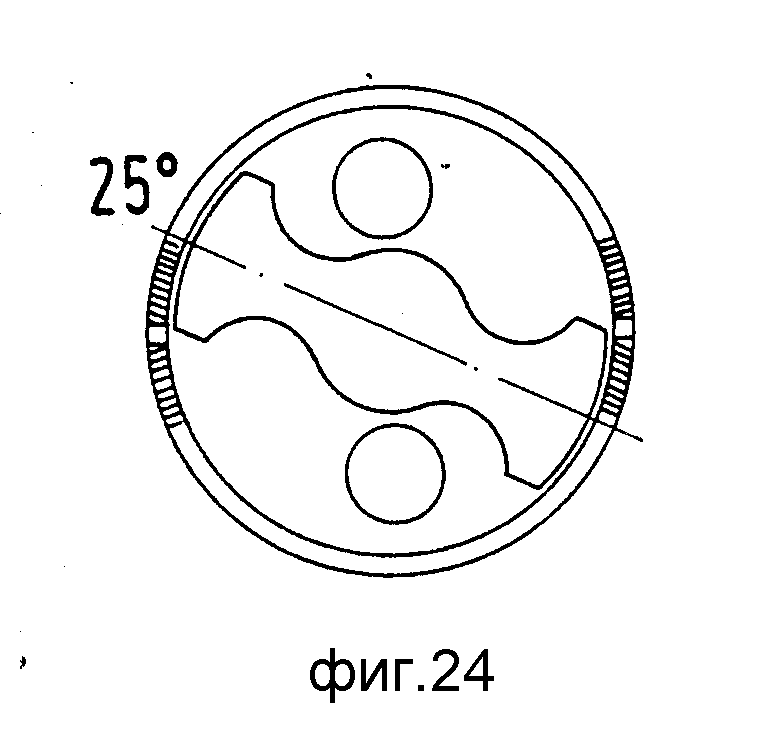
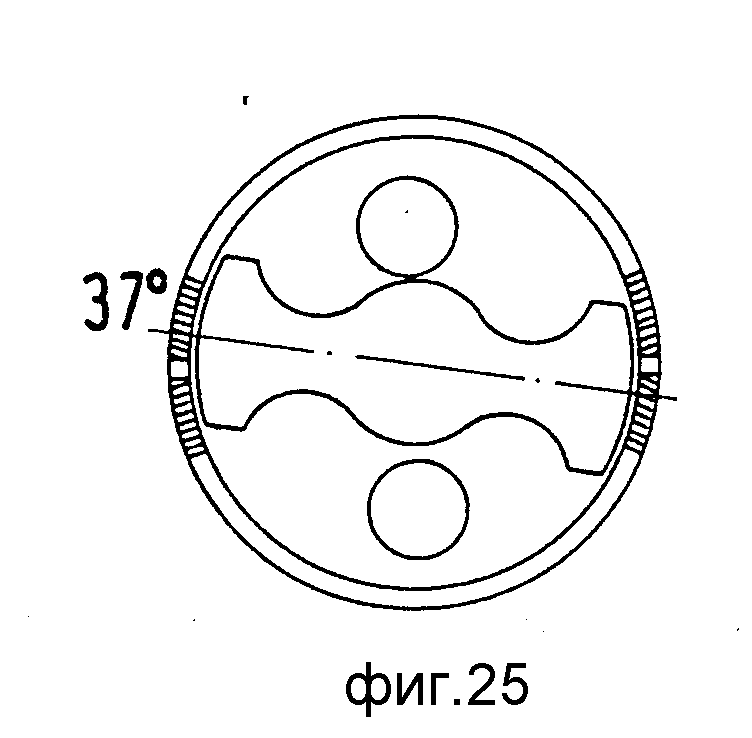
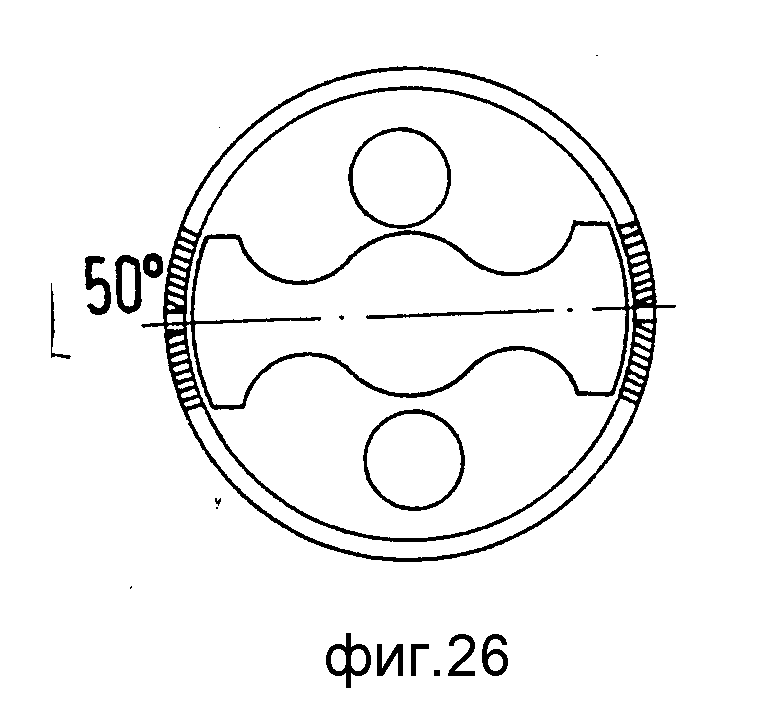
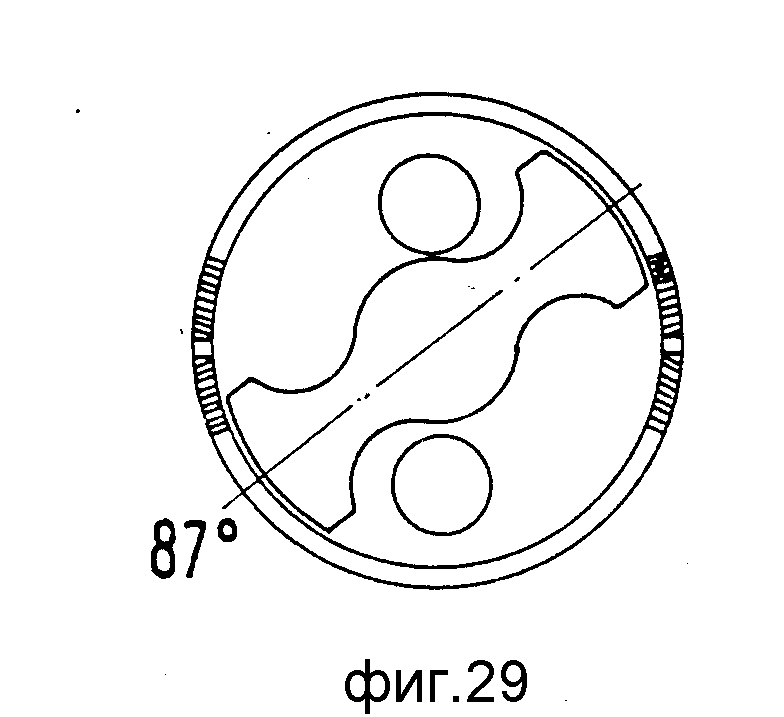
Выступы 54 расположены в камере поршня 32 радиально от его оси, прилегая к внутренней поверхности боковой стенки 51 поршня (см. фиг.21), и каждый выполнен так, что проходит вертикально вдоль верхней щели 52 и нижней щели 53 с одной стороны поршня 32. При этом щели 52 и 53 с каждой стороны поршня 32 смещены относительно друг друга, как показано на фиг.21-30, а именно, нижняя щель 53 начинается примерно там, где верхняя щель 52 заканчивается. Щели 52 и 53 это узкие вытянутые горизонтальные прорези. Обычно они должны иметь длину 6 мм и ширину 0,5 мм. Протяженность каждого выступа 54 по окружности должна быть не меньше двойной длины каждой щели 52 и 53.
Таким образом осуществляется постепенное уменьшение и последующее увеличение площади открытой части щели, когда выступ 54, поворачиваясь, движется вдоль нее. Это влияет на уровень потока жидкости в камере 46 поршня 32 и, следовательно, определяет относительное демпфирование, то есть сопротивление вращению коленного сочленения.
Как видно из фиг.22-30, щели 52 и 53 с одной стороны боковой стенки 51 поршня могут быть:
отдельно частично открыты или закрыты;
отдельно целиком открыты или закрыты;
обе целиком открыты или закрыты.
Кроме того, одна щель может быть целиком закрыта, а другая частично закрыта. И все это реализуется при помощи одного сервомотора 16 и клапана, благодаря чему достигаются компактность и легкость.
Вращение клапанных выступов 54 определяется программой управления микропроцессора, который управляет сервомотором 16 (см. фиг.32).
Каждый шаг или движение протеза разделяется на состояния путем сравнения сигналов от датчиков и записанных в память микропроцессора пороговых величин. Эти величины соответствуют определенным положениям клапанных выступов 54. С каждым переходом от состояния к состоянию (от одной пороговой величины к другой) меняется положение клапана 54 и, таким образом, достигается различное управление коленным сочленением.
Например, согласно фиг. 9, состояние 1 начало фазы стояния. Клапанные выступы 54 позволяют жидкости выходить из щелей 52 и, следовательно, коленное сочленение может сгибаться, когда человек давит своим весом. Микропроцессор следит за увеличением угла колена, и когда он достигает пороговой величины, это указывает на то, что колено согнулось до заранее определенного угла, при котором начинается состояние 2, когда положение клапана изменяется так, что выступы 54 перекрывают поток жидкости из щелей 52, оставляя открытым поток из щелей 53. Это прекращает дальнейшее сгибание коленного сочленения и делает возможным только разгибание.
Приведенный пример показывает, что устройство может иметь различные параметры контроля, зависящие от направления вращения коленного сочленения. Жидкость проходит через различные щели при каждом из двух движений колена (сгибании и разгибании). Таким образом, если щели 52 и 53 перекрыты независимо друг от друга, управление движением поршня может быть различным для каждого направления.
Фиг. 22-30 показывают фиксированные положения клапанных выступов 54. В действительности их положение может быть любым от 0 до 100o, чем фактически достигается бесконечный диапазон демпфирования. Это желательно при настройке протеза ноги на такие действия, как спуск по лестнице, при котором скорость спуска зависит от человека.
В качестве микропроцессора может быть использована модель фирмы Motorola Semiconductors Ltd. под обозначением ХС 68 НС 811 Е2 FN. Это 8-битный процессор с объемом памяти 2 К, 8 аналого-цифровых преобразователей и 8 цифровых входов. Чип (его электрическая схема приведена на фиг.33 и 34) имеет размер около 1х1 и не нужно других периферических чипов, поэтому он укладывается в маленький корпус 56 внутри протеза А (см. фиг.4 и 5).
Усиленные сигналы угла колена и нагрузки посылаются в микропроцессор 57 (см. фиг. 32). Для усиления могут быть использованы усилители TLC 272 и TLC 274 Texas Instruments.
Микропроцессор 57 и усилители смонтированы на плате 58 и помещены вместе с батареей 59 и держателем 60 батареи в корпус 56, который крепится к каркасу 6 (см.фиг.4, 5).
Программное обеспечение.
Программное обеспечение иллюстрируется диаграммой последовательных операций, данной в приложении.
Благодаря схожести информации датчиков при каждом шаге (повторяемость) возможно определить амплитуду каждого из двух сигналов в точках перехода при каждом шаге. Эти точки перехода важные моменты, когда демпфирование коленного сочленения должно меняться, чтобы позволить человеку идти. Точки перехода определяются микропроцессором 57 путем сравнения заранее определенных пороговых величин, записанных в памяти, с реальными сигналами от протеза А. Пока сигналы от протеза совпадают с ожидаемыми, микропроцессор может соблюдать последовательность цикла.
С таким типом программного обеспечения гидравлический демпфер Б может корректироваться в каждой точке перехода к новому положению, которое было заранее определено при настройке.
Эта система может, таким образом, определять положение протеза А во время каждого шага и обеспечивать нужный для этого положения коэффициент демпфирования. Кроме того, возможно определить, идет ли человек по ровной поверхности, вниз по лестнице, садится или столкнулся со сложной ситуацией, такой как спотыкание во время фазы маха.
Движение по ровной поверхности.
Эта ситуация иллюстрируется фиг.8, 9. Каждый из пронумерованных кружков
это состояние. Процессор всегда начинает с состояния 1, то есть с начала шага. Когда человек давит весом на протез А, коленное сочленение начинает сгибаться. Это увеличивает сигнал угла колена,
который постоянно сравнивается с записанной пороговой величиной, и, когда он достигает пороговой величины, процессор переходит в состояние 2. В точке перехода гидравлический демпфер меняет свое
состояние на заранее определенное, которое блокирует сгибание в состоянии 2.
Во время состояния 1 функция демпфера демпфировать сгибание колена и одновременно разрешать разгибание, а во время состояния 2 блокировать сгибание колена и одновременно разрешать, но демпфировать разгибание. При этом блокирование осуществляется независимо от демпфирования разгибания. Это позволяет человеку выпрямить колено во время состояния 2, даже если сгибание колена еще блокировано.
Состояние демпфирования требуется для контроля за степенью разгибания колена. Если выбрано состояние свободного разгибания, колено будет резко двигаться, и у человека заметная ненормальность походки.
Начальное сгибание колена после контакта пятки и выпрямление колена найдены в шаблонах нормальной походки.
Точная механика функций гидравлического демпфера показана на фиг.9 возле каждого пронумерованного кружка.
Переход от состояния 1 к состоянию 2 происходит, когда сигнал угла колена возрастает (см. фиг.10). График фиг.10 показывает, что сгибание колена прекращается вскоре после перехода в состояние 2. Временная задержка это время, необходимое демпферу для изменения состояния.
Когда человек осуществляет шаг, следующей важной точкой является фаза маха (время, когда стопа 9 находится не на земле). Указание на наступление фазы маха можно получить путем постоянного сравнения сигнала нагрузки с заранее определенной величиной.
Когда центр тяжести человека проходит над стопой, вес переносится на носок. Увеличение сигнала нагрузки заставляет микропроцессор переключиться в состояние 3, как только сигнал достигнет заранее определенной пороговой величины. Демпфер получает команду освободить коленное сочленение, тем самым позволяя человеку начать фазу маха.
Вся фаза маха отслеживается процессором. Переход в состояние 4 происходит по сигналу угла колена, превосходящему заранее определенную пороговую величину (см. фиг.10), когда коленное сочленение сгибается во время начала фазы маха.
Во время состояния 4 сигнал нагрузки игнорируется, и микропроцессор следит за первой производной угла колена. Производная указывает на скорость и направление вращения колена. Когда коленное сочленение достигает максимума сгибания при махе, производная становится равной нулю, и происходит переключение в состояние 5. Демпфер во время состояний 3 4 5 обеспечивает свободное сгибание и разгибание. Это позволяет осуществить фазу маха.
На завершение фазы маха указывает уменьшение сигнала угла колена до заранее определенной пороговой величины, соответствующей тому, что коленное сочленение разогнулось до прямого положения. Микропроцессор переключается в состояние 1, и вышеописанный цикл повторяется, пока человек идет по ровной поверхности.
Аварийная реализация фазы маха (спотыкание).
Нормальный шаблон данных об угле колена и нагрузке заставляет процессор осуществлять цикл состояний 1 2 3 4 5 1 (см. фиг.8 и 9). Когда носок протеза встретил препятствие во время фазы маха, цикл другой: 1 2 3 4 - 5 6 1 (см. фиг.8). Во время состояния 5 микропроцессор продолжает следить за информацией о производной угла колена и переключается в состояние 6, если первая производная, пройдя через нуль, опять стала положительной, указывая на то, что колено больше не разгибается, а сгибается (то есть препятствие прервало нормальную скорость разгибания колена). Во время состояния 6 демпфер блокирует сгибание коленного сочленения.
Дополнительное состояние 6 изменяет диаграмму ходьбы. Осуществляется круговое движение, то есть выполнение фазы маха без сгибания коленного сочленения. Это достигается раскачиванием конечности в сторону по дуге, чтобы оторваться от земли, вместо сгибания колена. Без сгибания колена во время фазы маха микропроцессор, отработав состояния 1 2 3, остановится. Эта проблема решается измерением времени, в течение которого микропроцессор находится в состоянии 3, и, если колено не было согнуто во время определенной продолжительности (0,84 с на фиг.9), микропроцессор переключается в состояние 1 независимо от входных данных.
Режим усаживания.
Когда человек сидит, коленное сочленение должно быть в незаблокированном состоянии, чтобы можно было расположить ногу в любом положении, например согнуть, чтобы разместить под стулом, или держать под прямым углом, чтобы сидеть прямо, или слегка согнуть, чтобы сидеть в автомобиле. Установка производится обычно при помощи рук или другой ноги.
Усаживание осуществляется путем обучения человека определенным движениям, чтобы сообщить микропроцессору о попытке сесть. Фиг.11 и 12 показывают цикл состояний для усаживания. На фиг.13 представлено изменение сигналов для типичных движений усаживания. Изначально микропроцессор находится в состоянии 1. Человек наклоняется назад, возрастает нагрузка на пятку протеза и начинает сгибаться коленное сочленение.
Микропроцессор переключается из состояния 1 в состояние 2, когда сигнал угла колена превосходит заранее определенную пороговую величину (см. изменение стадий на фиг.13).
Нагрузка на пятку уменьшает сигнал нагрузки до заранее определенной пороговой величины, и микропроцессор переключается в состояние 7. Включается таймер и измеряется время нагрузки на пятку. Через 1/3 с микропроцессор переключается в состояние 8, когда демпфер разрешает сгибание коленного сочленения (см. фиг.12). Человек переносит вес на протез и опускается на стул с контролируемой скоростью. Вновь производится измерение времени, и с выдержкой в 3/4 с микропроцессор переключается в состояние 9. В этом состоянии демпфер допускает свободу и в сгибании, и в разгибании колена, что позволяет человеку манипулировать протезом ноги для удобства сидения. Микропроцессор будет пребывать в состоянии 9, пока коленное сочленение не разогнется до прямого положения, что уменьшает сигнал коленного угла до пороговой величины, при которой микропроцессор переключается в состояние 1.
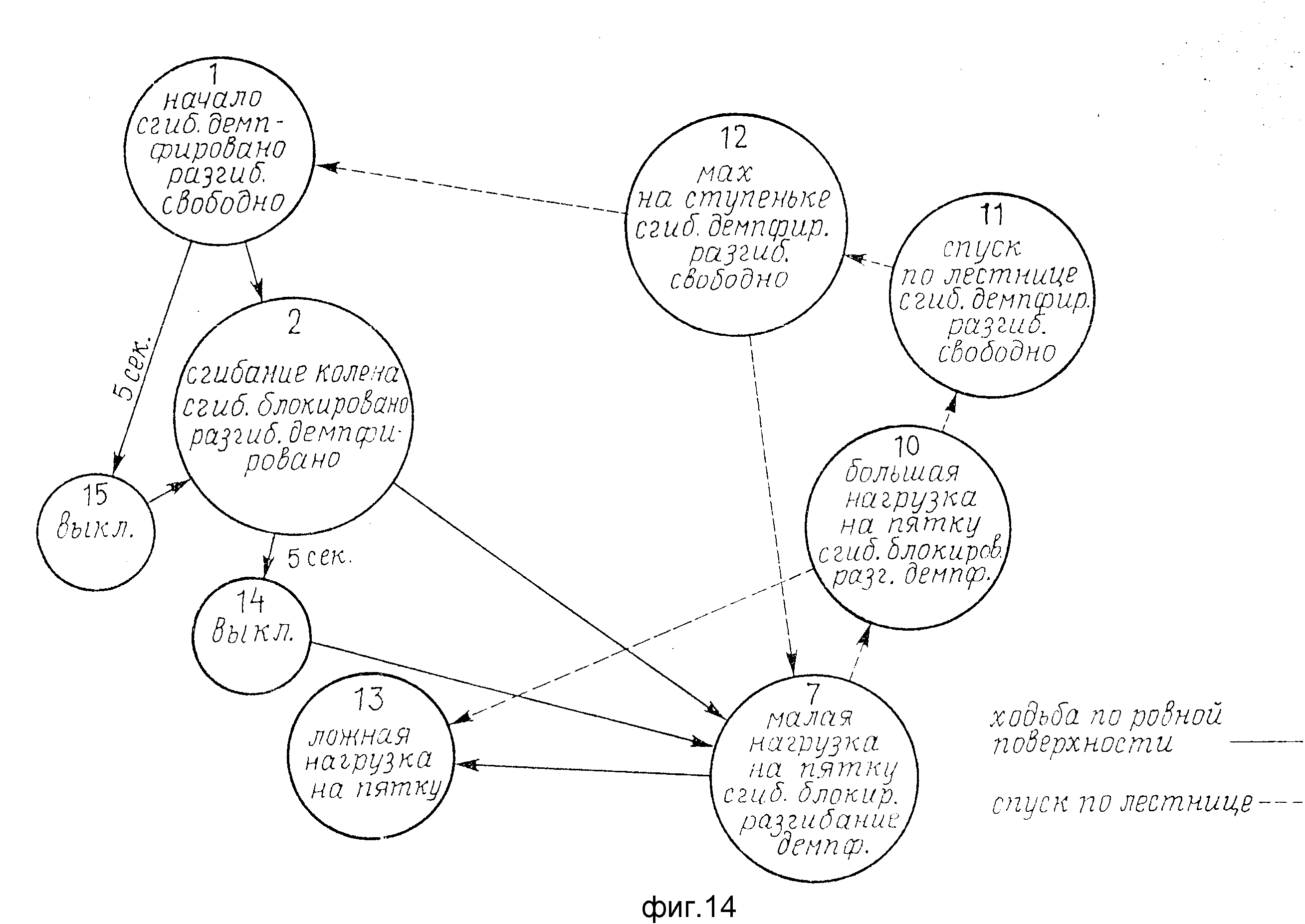
Спуск по лестнице.
Обычным методом спуска по лестнице для человека с ампутированной конечностью является использование только здоровой ноги для переноса веса тела вниз на ступеньку, пока протез контактирует с ближайшей ступенькой. Затем человек повторяет движение, используя здоровую ногу. Протез вообще не используется, и спуск осуществляется на одну ступеньку за раз.
Второй метод для более ловкого человека. Он состоит в нормальном спуске шаг за шагом, но при этом колено не контролируется, когда оно сгибается под тяжестью.
Изобретение обеспечивает определение факта, что человек собирается спускаться по лестнице и контроль скорости спуска.
Чтобы начать спуск по лестнице, процессор должен получить соответствующий сигнал от пользователя. Для этого пятка протеза помещается на вершину лестницы и к протезу прилагается вес. Подобно ходьбе по ровной поверхности первым изменением будет переход от состояния 1 к состоянию 2, когда колено начинает сгибаться (см. выше). В этой точке сигнал нагрузки уменьшается (нагрузка на пятку), и процессор переключается в состояние 7, а затем в состояние 10, когда нагрузка достигает заранее определенной пороговой величины (см. фиг.14 и 16).
Заметим, что вес, перенесенный пользователем на пятку, определяет, останется ли процессор в состоянии 7 (указание на усаживание) или перейдет в состояние 10 (указание на спуск по лестнице). Пользователь должен научиться прилагать нужные усилия, чтобы правильно сигнализировать процессору.
Когда процессор переключается в состояние 10, включается таймер. Если время прикладывания нагрузки больше 1/2 с, процессор переключается в состояние 11. Во время состояния 11 демпфер получает команду демпфировать сгибание коленного сочленения и позволить разгибание. Это демпфирование заранее определяется в соответствии с пожеланиями пользователя. Кто-то любит спускаться по лестнице медленно, другие предпочитают быстрый спуск.
После каждой ступеньки пользователь спускается на следующую на другой ноге. В это время процессор ожидает разгибания коленного сочленения на фазе маха. Разгибание уменьшает сигнал угла колена до заранее определенной пороговой величины, и процессор переключается в состояние 12. Демпфер получает команду ограничить сгибание и разрешить разгибание. Пользователь снова ставит пятку на следующую ступеньку и повторяет последовательность 7 10 11 12 для каждого шага. Заметим, что процессор не возвращается в состояние 1 после каждого шага. Это происходит благодаря тому, что нет полного разгибания ноги до следующей ступеньки.
Когда марш лестницы заканчивается, коленное сочленение разгибается до прямого положения, угол колена уменьшается до заранее определенной пороговой величины, и процессор переключается в состояние 1. Теперь возможен выбор между лестницей, усаживанием или ровной поверхностью.
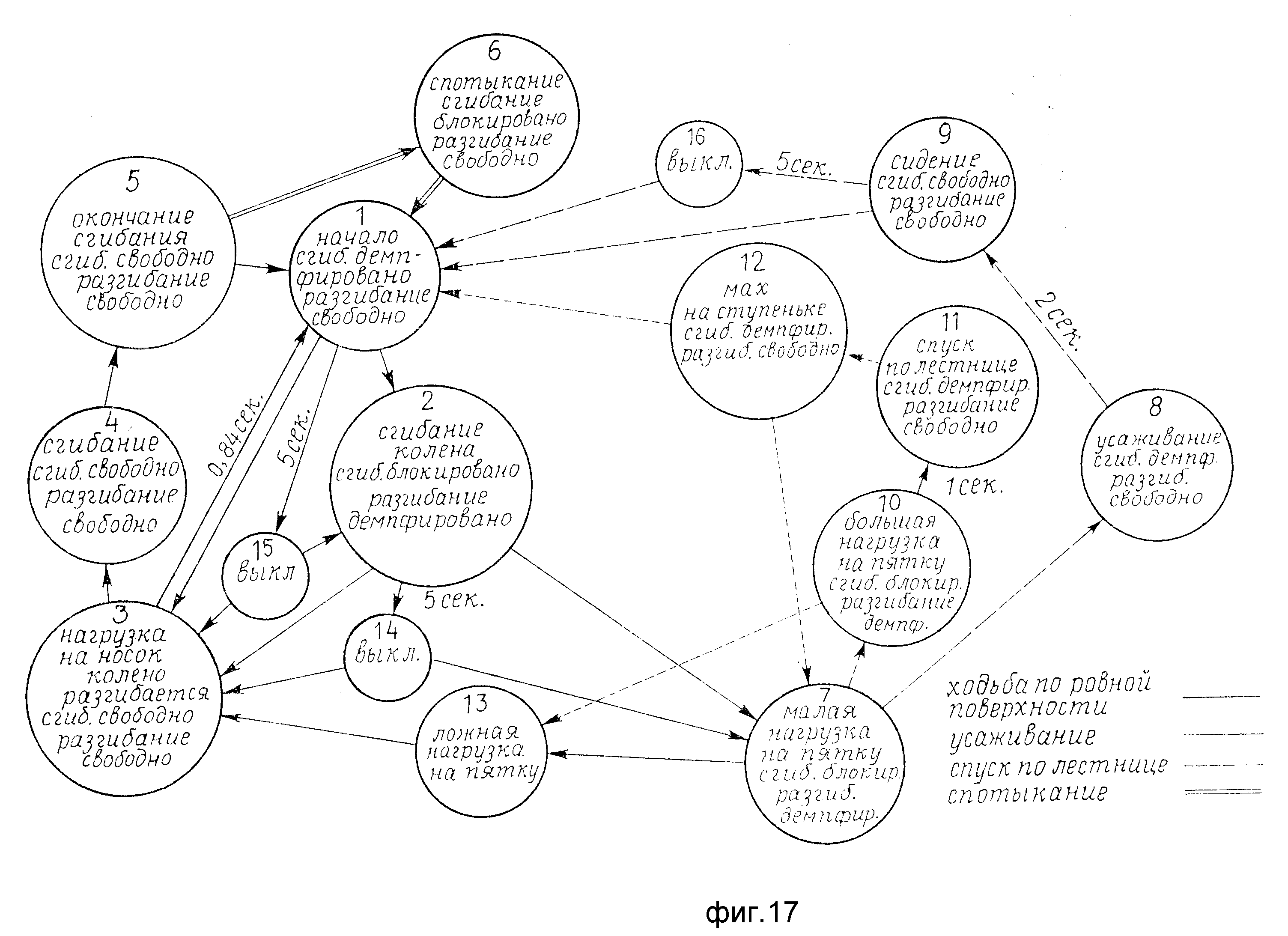
Фиг.12 показывает все состояния, сгруппированные вместе. В начале каждого шага программа определяет, идет ли человек по ровной поверхности (цикл 1 2 3 4 5 1), наткнулся ли носком на препятствие во время шага (1 2 3 - 4 5 6 1), садится (1 2 7 8 9 1) или спускается по лестнице (1 2 7 10 11 12).
Человеку не нужно нажимать ни на какие кнопки или поворачивать рычаги, чтобы процессор менял функции на различных участках. Указание дается автоматически в зависимости от движения человека.
Дополнительные особенности диаграммы состояний механизм экономии энергии источника питания (батареи). Если человек останавливается более чем на 3 с в состояниях 1, 2 или 9, процессор прекращает питание привода и переходит в выключенное состояние.
Звуковой сигнал (см. фиг.32) сообщает пользователю, что требуется замена батареи. Если замена батареи своевременно не осуществлена, демпфер получает команду демпфировать сгибание и разгибание перед полной потерей питания. Это позволяет человеку перенести вес на протез без излишнего сгибания колена, пока устанавливается заряженная батарея.
Реферат
Изобретение относится к медицине, а именно к протезированию. Технический результат - улучшение походки, приближая ее к естественной. Это достигается тем, что способ и устройство управления протезом ноги реализуют принципы разделения каждого шага на стадии и улучшения реакции системы на каждой стадии. Информацию получают от датчиков нагрузки и угла поворота коленного сочленения, преобразуют ее в электрические сигналы, анализируют программируемым микропроцессором и с помощью управляемого микропроцессором гидравлического демпфера на каждой стадии корректируют сопротивление коленного сочленения сгибанию, разгибанию или тому и другому. 2 с. и 4 з. п. ф-лы, 36 ил.

Комментарии